SATELITARNE TECHNIKI POMIAROWE
|
|
|
- Emilia Drozd
- 5 lat temu
- Przeglądów:
Transkrypt
 ALTERNATYWNE DO GNSS METODY OBSERWACJI SATELITARNYCH 1")
1 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 2 SYSTEMY WSPOMAGANIA SATELITARNEGO I NAZIEMNEGO IAG GGOS PORTAL, INTERNATIONAL SERVICE GNSS (IGS) ALTERNATYWNE DO GNSS METODY OBSERWACJI SATELITARNYCH 1
2 SYSTEMY SBAS EGNOS SBAS Satellite Based Augmentation System. To satelitarny system wspomagający. Europejski system EGNOS (European Geostationary Navigation Overlay Service) wspomaga działanie istniejących systemów nawigacji satelitarnej (głównie sieci Navstar/GPS) od 2003 roku. Do odbiorników GPS współpracujących z EGNOS wysyłane są sygnały korekcyjne pochodzące z satelitów geostacjonarnych znajdujących się nad Europą. Sygnały te zawierają korekty pozycji podawanych przez sieć Navstar, co kilkukrotnie zwiększa ich dokładność. Przede wszystkim jednak, EGNOS weryfikuje dane pochodzące z sieci Navstar, sprawdzając, czy nie doszło do awarii tych satelitów lub błędów podczas transmisji. M.in. informuje o spadku dokładności lub awarii systemu GPS najpóźniej po 6 sekundach. Dzięki temu, dane z sieci Navstar/EGNOS mogą być zastosowane tam, gdzie ze względów bezpieczeństwa, muszą być w pełni wiarygodne od 2011 roku. Są to tzw. aplikacje typu "Safety of Life", np. precyzyjna nawigacja samolotów, sterowanie ruchem pociągów czy niektóre akcje ratunkowe. 2
3 SYSTEMY SBAS EGNOS EGNOS opiera się na trzech satelitach geostacjonarnych. Na Ziemi znajdują się stacje pomiarowe i kontrolne, które prowadzą ciągłe testy sieci Navstar i satelitów EGNOS. Obliczają poprawki danych GPS, wykrywają nieprawidłowości w transmisji i sprawdzają, czy nie doszło do awarii któregoś z satelitów. Poprawki i dane o stanie sieci GPS są transmitowane do satelitów EGNOS, które z kolei wysyłają je do odbiorników GPS. 3
4 EGNOS Segment kosmiczny składa się z trzech satelitów geostacjonarnych obejmujących zasięgiem całą Europę (15.5 W, 21.5 E i 25 E). Segment naziemny składa się z 40 stacji referencyjnych i retransmitujących oraz 6 stacji kontrolnych i kontrolno-testowych: 34 stacje pomiarowo-obserwacyjne (Ranging and Integrity Monitoring Stations RIMS) odczytują depesze nawigacyjne z satelitów GPS (w tym jedna w Warszawie, w Centrum Badań Kosmicznych), 6 stacji transmitujących (Navigation Land Earth Station NLES) wysyła poprawki do satelitów, które następnie przekazują je do użytkowników, 4 stacje kontrolne (Mission Control Center MCC) przetwarzają dane i obliczają poprawki różnicowe, 2 stacje kontrolno-testowe: DVP (Development Verification Platform) i ASQF (Application Specific Qualification Facility) w Torrejón obok Madrytu oraz PACF (Performance Assessment and Check-out Facility) w Tuluzie. 4
5 EGNOS 5
6 EGNOS Stan systemu EGNOS na podstawie stacji PERFECT w Warszawie na dzień , godz. 21:00 HPE błąd położenia dla składowych poziomych HPL gwarantowana dokładność dla składowych poziomych 6

7 EGNOS Stan systemu EGNOS na podstawie stacji PERFECT w Warszawie na dzień , godz. 21:00 VPE błąd położenia dla składowych pionowych VPL gwarantowana dokładność dla składowych pionowych 7

8 8
 od 2007 roku oraz QZSS (Quasi-Zenith Satellite System) od 2018 roku?")
9 SYSTEMY SBAS Odpowiednikami EGNOS w Ameryce Północnej jest WAAS (Wide Area Augmentation System) od 2003 roku, w Indiach GAGAN (GPS-Aided Geosynchronous Augmented Navigation System) od 2014 roku w Japonii MSAS (Multi-functional Satellite Augmentation System) od 2007 roku oraz QZSS (Quasi-Zenith Satellite System) od 2018 roku???, w Rosji SDCM (System of Differential Correction and Monitoring) od 2018 roku???, OmniSTAR komercyjne rozwiązanie SBAS. 9
10 Liczba satelitów: 7 SYSTEMY SBAS OmniSTAR Typ orbity: geostacjonarna Pierwotna nazwa LandStar. Jest to pierwsze i jak dotąd jedyne komercyjne rozwiązanie SBAS. Od 2010 roku jest to także pierwszy tego typu system oferujący poprawki dla GLONASS. OmniSTAR wyróżnia rekordowy zasięg poprawki dostępne dla większości obszarów lądowych świata. Segment naziemny systemu składa się z około 100 stacji referencyjnych (najbliżesze Polski: Wiedeń i Charków) a także z dwóch stacji kontrolnych. Na segment kosmiczny składa się siedem satelitów telekomunikacyjnych. 10

11 SYSTEMY SBAS OmniSTAR OmniSTAR stacje referencyjne i zasięg działania 11
12 Poprawki OmniSTAR dostępne są za pośrednictwem następujących serwisów: VBS (Virtual Base Station) podstawowa usługa. Poprawki VBS obliczane są na podstawie jednoczęstotliwościowych pomiarów z kilku stacji referencyjnych. Usługa oferuje dokładność porównywalną z WAAS czy EGNOS w materiałach promocyjnych systemu określono ją jako 70 cm w poziomie (prawdopodobieństwo 95%). XP (Extended Performance) poprawki obliczane są dla dwóch częstotliwości GPS z wykorzystaniem korekt orbit i zegarów atomowych. Dokładność wyznaczania pozycji wynosi 10 cm w poziomie i 15 cm w pionie (ufność 95%). HP (High Performance) w odróżnieniu od VBS poprawki w tej usłudze obliczane są dla dwóch częstotliwości GPS, co znacząco redukuje błąd wynikający z opóźnienia jonosferycznego. Dokładność zbliżona do XP. G2 to GPS + GLONASS, usługa XP wzbogacona o dane dla sygnałów GLONASS. Dokładność zbliżona do XP. IP (Internet Protocol) poprawki dostarczane są za pośrednictwem internetu. Użytkownik musi więc posiadać odbiornik wyposażony w modem GPRS. Rozwiązanie to przeznaczone jest przede wszystkim do pracy przy słabej widoczności nieba oraz na wysokich szerokościach geograficznych. 12
13 SYSTEMY WSPOMAGANIA NAZIEMNEGO Ground-Based Augmentation Systems (GBAS) 13
 Ground Regional Augmentation System")

 The Ground-Based Augmentation System (GBAS) GBAS")
14 SYSTEMY WSPOMAGANIA NAZIEMNEGO Ground-Based Augmentation Systems (GBAS) Ground-Based Augmentation Systems (GBAS) Ground Regional Augmentation System (GRAS) Local Area Augmentation System (LAAS) Wymagania bezpieczeństwa nawigacji w lotnictwie cywilnym Wymagania systemu i standardy określane przez: FAA (Federal Aviation Organization) <-> ICAO (International Civil Aviation Organization) The Ground-Based Augmentation System (GBAS) GBAS Landing System (GLS) 14
15 Wcześniej The Ground-Based Augmentation System (GBAS) to Local Area Augmentation System (LAAS). 15
16 SYSTEMY WSPOMAGANIA NAZIEMNEGO Ground-Based Augmentation Systems dostarczanie (GBAS) Zadanie: dodatkowych informacji w celu zwiększenia wydajności pozycjonowania satelitarnego, nawigacji i przekazywania sygnałów czasu. Parametry/cechy: dokładność, dyspozycyjność, uczciwość i rzetelność, niezależne sprawdzenie GNSS, integralność monitorowania i alarmowania dla zastosowań krytycznych. Wykorzystanie: do operacji krytycznych dla bezpieczeństwa: lądowanie, wejście do portu, manewrowanie, itp.. 16
17 GBAS zapewnia precyzyjną nawigację i obsługę podejścia w sąsiedztwie lotniska (w odległości około 23 mil morskich, tj km). Nadaje, przesyła korekcję różnicową poprzez radiowe łącze danych bardzo wysokiej częstotliwości (VHF) z wydajnego nadajnika naziemnego. GBAS daje wysoką dokładność, dostępność i integralność danych niezbędną do odpowiednich kategorii podejścia. Dokładność jest mniejsza niż jeden metr, zarówno w osi poziomej i pionowej. 17
18 The Ground-Based Augmentation System (GBAS) GBAS - wyposażenie naziemne (znajdujące się na lotnisku lub w pobliżu lotniska): - trzy lub więcej anten GPS, - centralny system przetwarzania (komputer i oprogramowanie), - nadajnik VHF Data Broadcast (VDB) GBAS - wyposażenie pokładowe: - antena GPS, - antena bardzo wysokiej częstotliwości (VHF), - związane z nimi urządzenia przetwarzające. Na pokładzie samolotu znajduje się Multi-Mode Receiver (MMR), który umożliwia równoczesny odbiór i przetwarzanie sygnałów GPS, GBAS i ILS odbieranych za pomocą typowych anten i sprzętu. GBAS używa odpowiedniej bezpiecznej, szyfrowanej, odpornej łączności radiowej (VHF) w celu zapewnienia statkowi powietrznemu korekt GPS i informacji o ścieżce podejścia. Zakres (VHF) : ,975 MHz co 25 khz (min.108,025mhz - max.117,950mhz). Może i wykorzystuje różne systemy GNSS, również SBAS i pseudolity. 18

19 Pseudosatelity Pseudosatellites Pseudolity Pseudolites To naziemne nadajniki sygnałów GNSS. Koncepcja pseudosatelitów została opracowana i zastosowana w 1970 roku. Podczas pierwszych testów projektowych systemu GPS, zaprojektowano też i wykorzystywano nadajniki naziemne do emitowania sygnału podobnego do GPS. Obecnie pseudolity mają wiele zastosowań jednakże najbardziej rozpowszechnione i najczęściej stosowane są pseudolity lotniskowe. 19

20 Pseudolity Classification of Pseudolite Navigation System 20


21 VCO Voltage Controlled Oscillator Generator sterowany napięciem Pseudolity Block diagram of Pseudolite TOXO Temperature Compensated Crystal Oscillator OCXO Oven Controlled Crystal Oscillator PLL Phase Locked Loop IC BPF Band-pass filter 21

22 Pseudolity W oparciu o pseudolity można zbudować system nawigacji autonomicznej używany, na przykład do nawigacji w miastach lub w obiektach przemysłowych. Pseudolity to najczęściej statyczne nadajniki naziemne, które emitują sygnały podobne do GNSS, z wykorzystaniem podobnych do GNSS zakresie kodów i częstotliwości nośnych. Komunikat danych albo podobny do tego odpowiedniego sygnału GNSS lub zmienione w celu przesyłania informacji do poprawy wszystkich innych sygnałów GNSS. 22

23 Pseudolity Projekt polski - pseudolita retranslacyjny systemów SBAS 23

24 Pseudolity 24
25 Pseudolity Oprócz wielu zalet wykorzystania pseudolitów przy ich zastosowaniu występuje wiele problemów. Zakłócenia ze względu na bliską/daleką odległość pomiędzy nadajnikami i odbiornikiem. To skutki różnej mocy - poziomów między sygnałami pseudolitów i sygnałów GNSS. Moc maleje wraz z kwadratem odległości zatem odebrany sygnał pseudolity, który ma porównywalny z GNSS poziom mocy 160dBW w odległości 30 km wzrośnie do - 130dBW w odległości 1 km i w związku z zagłuszy wszystkie inne sygnały GNSS. Różne metody rozwiązania tego problemu. Sygnały z pseudolity są przesyłane w formie krótkich, cyklicznych impulsów. Sygnały te są transmitowane przez jakiś czas, na przykład około 0,1 ms, natomiast w ciągu następnych 0,9 ms nie są nadawane. Procedura ta jest realizowana w sposób ciągły. W ciągu tej 0,1 ms sygnały GNSS są zakłócane. Odbiorniki GNSS jednak nadal są w stanie odbierać i śledzić sygnały ze względu długi okres bez zakłóceń 0,9 ms. I tak w każdej 1 ms. Krótki okres zakłóceń (0,1 ms) jest kompensowany przez długi okres 0,9 ms odbioru sygnału z GNSS. 25
26 Pseudolity Kolejny problem jest spowodowany przez efektem wielotorowości. Anteny pseudolitów muszą być zaprojektowane i umieszczony w taki sposób, że w miejscu nadajnika nie występuje wielotorowość. W przeciwieństwie do sygnałów GNSS, wielotorowość jest tutaj stała w czasie i zmienia się tylko z przy ewentualnej zmianie stanowiska użytkownika/odbiornika. Kolejnym problemem jest synchronizacja czasu do czasu GNSS, która musi być osiągnięta, w przeciwnym określana pozycja straci dokładność. 26
27 Pseudolity Częstotliwość przesyłu danych jest odpowiednio zwiększona do 1000 bps i więcej. Dodatkowy sygnał GNSS poprawia dostępność i ciągłość pozycji. Informacje docierają do odbiornika użytkownika. Pseudolity wzmacniają geometrię konstelacji, zwłaszcza w kierunku pionowym. Dokładność jest zwiększona przez dodatkowy sygnał z pseudolity, w szczególności też wzmocnione uzyskane jest dla poprawek różnicowych. Sygnały z pseudolitów nie są obarczone wpływem jonosfery (błąd opóźnienia), a także znacznie ograniczony jest wpływ troposfery. Statyczne położenie pseudolity, przez kalibrację, umożliwia zminimalizowanie błędu orbity. Niewielkie odległości między pseudolitami oraz odbiornikami użytkownika powodują szybkie zmiany geometrii przy zastosowaniach kinematycznych. Sprzyja to rozwiązywaniu problemu nieoznaczoności. 27

28 GNSS a Pseudolity Temperature Compensated Crystal Oscillator Oven Controlled Crystal Oscillator 28


29 Pseudolity Pseudolity armii amerykańskiej A Galileo test environment Pseudolite in the Berchtesgaden Alps 29


30 Pseudolity Automatic Control of Vehicle using Pseudolite based Indoor Navigation System 30

31 Pseudolity Pseudolite Indoor Navigation System in Seoul Nat'l Univ. 31

32 Pseudolity 32

33 Systemy wspomagania na niskich częstotliwościach LORAN - LOng RAnge Navigation Hiperboliczny system radionawigacji, działający w zakresie fal długich odbieranych z dwóch lub więcej radiolatarni do określenia pozycji. Wykorzystywany jest głównie do nawigacji w żegludze morskiej i lotnictwie. Łańcuch LORAN-C ma jedną stację główną oznaczoną jako M (master) i kilka stacji podległych, oznaczanych W, X, Y, Z. Nadajniki mogą być różnej mocy od 200 kw do 2 MW i spełniać podwójną funkcje: pojedyncza stacja może być stacją główną w jednym łańcuchu i jednocześnie podrzędną w innym. Maszt systemu LORAN-C położony na wyspie Sylt Europejski system LORAN-C, został wyłączony 31 grudnia
34 Systemy wspomagania na niskich częstotliwościach Eurofix z LORAN-C - Holandia, Loran GNSS (LOGIC) - USA Szereg systemów wspomagania niskiej częstotliwości było badanych pod kątem ich wykorzystania. Jeden z nich to Eurofix, który dostarcza informację GNSS za pomocą infrastruktury Loran-C. System został opracowany w Delft University of Technology w Holandii. Impulsowe sygnały Loran-C są modulowane przez zwiększania ilości informacji. W ten sposób, 30 bps informacji może być transmitowana do augmentacji bez wpływu na wydajność nawigacji naziemnej Loran-C. Osiągana dokładność w poziomie mieści się w zakresie od 1 do 3 m (95%) w zależności od liczby satelitów i lokalizacji. Obszar pokrycia Eurofix odpowiada około km wokół jednego nadajnika Loran-C. Wydajność systemu różnicowego GPS jest bardzo dobra. 34

35 IAG GGOS PORTAL 35

36 GGOS PORTAL Portal/EN/Topics/SatelliteMissions/SatelliteMissions.html 36
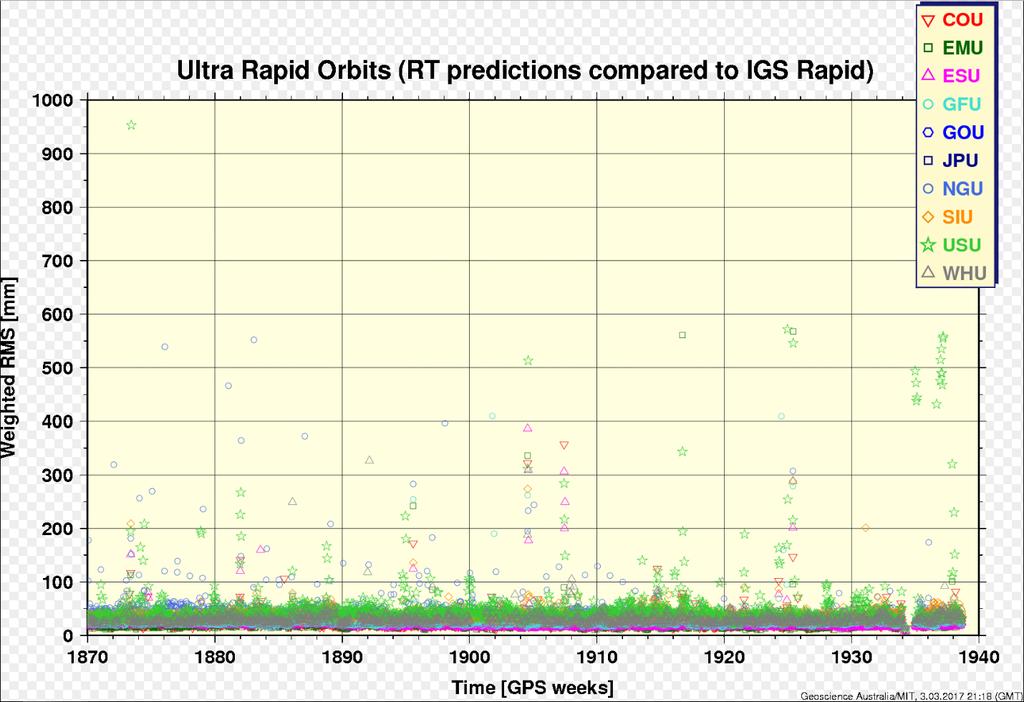
37 International Service GNSS (IGS) Międzynarodowe Stowarzyszenie Geodezji (International Association of Geodesy - IAG) ustanowiło w 1993 roku International Service GNSS (IGS). Jego celem jest wspieranie geodezyjnych i geofizycznych działań badawczych poprzez dostarczanie danych i produktów GNSS. IGS sprawuje rolę koordynacyjną, ustala normy i specyfikacje, zachęca społeczność międzynarodową do przestrzegania konwencji. Współpracuje z grupami międzynarodowymi, sieciami śledzenia satelitarnego GNSS, centrami, ośrodkami analitycznymi i różnymi grupami roboczymi. Obecnie to ponad 200 organizacji z ponad 100 krajów. Witryna sieci web IGS a obecnie IGS jest znana przede wszystkim jako źródło dokładnych o orbitach GPS PRECYZYJNE EFEMERYDY. Jednak również dostarcza inne produkty dotyczące obserwacji Ziemi i badań, pozycjonowania, nawigacji i pomiaru czasu. Rozwiązania IGS są to połączone produkty, które integrują rozwiązania 37 generowane przez poszczególne centra analiz.
 http://www.igs.")
38 International Service GNSS (IGS) 38
39 39
40 40

41 41
42 42
43 43
44 44
45 ftp://ftp.igs.org/pub/gps/1940/



46 OBOWIĄZKOWO NALEŻY ZAPOZNAĆ SIĘ Z TREŚCIĄ P. Zalewski, Alternatywne do GNSS metody obserwacji satelitarnych, 46

47 LITERATURA K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie, Warszawa B. Hofmann-Wellenhof, H. Lichtenegger, E. Wasl, GNSS Global Navigation Satellite Systems GPS, GLONASS, Galileo and more, Springer, Wien - New York P. Zalewski, Alternatywne do GNSS metody obserwacji satelitarnych, [dostęp: ] P. Zalewski, Systemy satelitarne wykorzystywane w nawigacji, wigacji.pdf [dostęp: ] D. Dardari, M. Luise,E. Falletti Satellite and Terrestrial Radio Positioning Techniques: A Signal Processing, Elsevier, [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] s/ [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] 47
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Patronat nad projektem objęły: ESA (Europejska Agencja Kosmiczna), Komisja Europejska (KE),
, Komisja Europejska (KE),") Początki Dynamiczny rozwój systemów nawigacji satelitarnej i ich wykorzystania w bardzo wielu dziedzinach życia codziennego, przyczynił się do faktu, że także w Europie zaczęto myśleć nad stworzeniem własnego
Początki Dynamiczny rozwój systemów nawigacji satelitarnej i ich wykorzystania w bardzo wielu dziedzinach życia codziennego, przyczynił się do faktu, że także w Europie zaczęto myśleć nad stworzeniem własnego
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Rozkład poprawek EGNOS w czasie
 KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
przygtowała: Anna Stępniak, II rok DU Geoinformacji
 przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
GEOMATYKA program rozszerzony
 GEOMATYKA program rozszerzony 2015-2016 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości
GEOMATYKA program rozszerzony 2015-2016 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
EGNOS to działa! Za oknem widać niewiele, Więcej niż GPS. WYDARZENIE Próby lotne podejść APV I
 WYDARZENIE Próby lotne podejść APV I EGNOS to działa! Za oknem widać niewiele, a na pewno nie widać lotniska. Pod nami poletka i lasy rozmyte zamgleniem. Lecimy po kresce procedury do lądowania. Zniżamy
WYDARZENIE Próby lotne podejść APV I EGNOS to działa! Za oknem widać niewiele, a na pewno nie widać lotniska. Pod nami poletka i lasy rozmyte zamgleniem. Lecimy po kresce procedury do lądowania. Zniżamy
Sieci Satelitarne. Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl
 Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Systemy satelitarne wykorzystywane w nawigacji
 Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej
 CIEĆKO Adam 1,2 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz 2 OSZCZAK Stanisław 2 GRUNWALD Grzegorz 1 BABER Krzysztof 2 Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej WSTĘP Nawigacja
CIEĆKO Adam 1,2 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz 2 OSZCZAK Stanisław 2 GRUNWALD Grzegorz 1 BABER Krzysztof 2 Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej WSTĘP Nawigacja
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS)
") Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju. Acta Scientifica Academiae Ostroviensis nr 35-36,
 Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej
 Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej Konferencja Komisji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych PAN Satelitarne
Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej Konferencja Komisji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych PAN Satelitarne
EEGS. możliwości poprawy jakości systemu EGNOS. EGNOS Extension to Eastern Europe. 04 czerwca 2011 Wrocław
 EEGS możliwości poprawy jakości systemu EGNOS 04 czerwca 011 Wrocław R.Zdunek, J. Zielioski, M.Krywanis-Brzostowska PLAN O projekcie Testy Statyczne Kinematyczne Metody poprawy jakości systemu EGNOS Kontynuacja
EEGS możliwości poprawy jakości systemu EGNOS 04 czerwca 011 Wrocław R.Zdunek, J. Zielioski, M.Krywanis-Brzostowska PLAN O projekcie Testy Statyczne Kinematyczne Metody poprawy jakości systemu EGNOS Kontynuacja
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
SATELITARNE SYSTEMY NAWIGACJI
 SATELITARNE SYSTEMY NAWIGACJI GNSS Global Navigation Satellite Systems Wiadomości ogólne Piotr MIELNIK 22.02.1978 wystrzelono pierwszego satelitę systemu NAVSTAR GPS Nikt wówczas w wczas nie przewidywał,,
SATELITARNE SYSTEMY NAWIGACJI GNSS Global Navigation Satellite Systems Wiadomości ogólne Piotr MIELNIK 22.02.1978 wystrzelono pierwszego satelitę systemu NAVSTAR GPS Nikt wówczas w wczas nie przewidywał,,
AGROCOM system jazdy równoległej
 AGROCOM system jazdy równoległej Jerzy Koronczok Agrocom Polska. Oprogramowanie i nowe możliwości dla rolnictwa. 47-120 Żędowice GPS systemy prowadzenia równoległego Agrocom E-DRIVE: Nowości Baseline HD
AGROCOM system jazdy równoległej Jerzy Koronczok Agrocom Polska. Oprogramowanie i nowe możliwości dla rolnictwa. 47-120 Żędowice GPS systemy prowadzenia równoległego Agrocom E-DRIVE: Nowości Baseline HD
GEOMATYKA. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA 2018 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Linie siatki topograficznej (kilometrowej) dzielą każdą strefę odwzorowania na słupy o szerokości 64 km oraz
GEOMATYKA 2018 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Linie siatki topograficznej (kilometrowej) dzielą każdą strefę odwzorowania na słupy o szerokości 64 km oraz
GEOMATYKA program rozszerzony. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program rozszerzony 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu SPUTNIK 1 (4 października 1957, ZSRR) pierwszy sztuczny satelita. MINITRACK (1958, NAVSPASUR
GEOMATYKA program rozszerzony 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu SPUTNIK 1 (4 października 1957, ZSRR) pierwszy sztuczny satelita. MINITRACK (1958, NAVSPASUR
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
WYKORZYSTANIE SYSTEMU EGNOS NA POTRZEBY NAWIGACJI LOTNICZEJ W POLSCE WSCHODNIEJ
 1-2011 PROBLEMY EKSPLOATACJI 57 Janusz ĆWIKLAK, Marek GRZEGORZEWSKI, Henryk JAFERNIK, Stanisław OSZCZAK Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Adam CIEĆKO Uniwersytet Warmińsko-Mazurski w
1-2011 PROBLEMY EKSPLOATACJI 57 Janusz ĆWIKLAK, Marek GRZEGORZEWSKI, Henryk JAFERNIK, Stanisław OSZCZAK Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Adam CIEĆKO Uniwersytet Warmińsko-Mazurski w
Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek
 Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek Chełm, 15.02.2005 Zakres prezentacji Wymagania ICAO dla systemów GNSS Wymagania ICAO dla poszczególnych
Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek Chełm, 15.02.2005 Zakres prezentacji Wymagania ICAO dla systemów GNSS Wymagania ICAO dla poszczególnych
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ
 GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
Za szczególne zaangażowanie i wkład w opracowanie raportu autorzy dziękują:
 Foresight Przyszłość technik satelitarnych w Polsce to realizowany przez Polskie Biuro ds. Przestrzeni Kosmicznej projekt, którego celem jest ocena perspektyw i korzyści z wykorzystania technik satelitarnych
Foresight Przyszłość technik satelitarnych w Polsce to realizowany przez Polskie Biuro ds. Przestrzeni Kosmicznej projekt, którego celem jest ocena perspektyw i korzyści z wykorzystania technik satelitarnych
Naziemne systemy nawigacyjne. Wykorzystywane w nawigacji
 Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
roku system nawigacji satelitarnej TRANSIT. System ten wykorzystywano
 System nawigacji K U R S satelitarnej GPS, część 1 Od historii do przyszłości Wiele osób zajmujących się amatorsko, a nieraz i profesjonalnie elektroniką nie zdaje sobie w pełni sprawy z ogromnego postępu,
System nawigacji K U R S satelitarnej GPS, część 1 Od historii do przyszłości Wiele osób zajmujących się amatorsko, a nieraz i profesjonalnie elektroniką nie zdaje sobie w pełni sprawy z ogromnego postępu,
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA
 Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p.
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p.
Rok akademicki: 2018/2019 Kod: DGI s Punkty ECTS: 4. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Numeryczne opracowanie obserwacji GNSS Rok akademicki: 2018/2019 Kod: DGI-1-616-s Punkty ECTS: 4 Wydział: Geodezji Górniczej i Inżynierii Środowiska Kierunek: Geoinformacja Specjalność: Poziom
Nazwa modułu: Numeryczne opracowanie obserwacji GNSS Rok akademicki: 2018/2019 Kod: DGI-1-616-s Punkty ECTS: 4 Wydział: Geodezji Górniczej i Inżynierii Środowiska Kierunek: Geoinformacja Specjalność: Poziom
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
AKTUALNY STAN REALIZACJI PROJEKTU ASG+
 AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ SATELITARNE TECHNIKI POMIAROWE CZĘŚĆ 1a. WPROWADZENIE DO POMIARÓW SATELITARNYCH Opracowanie: Leszek
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ SATELITARNE TECHNIKI POMIAROWE CZĘŚĆ 1a. WPROWADZENIE DO POMIARÓW SATELITARNYCH Opracowanie: Leszek
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
Serwisy postprocessingu POZGEO i POZGEO D
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Systemy Telekomunikacji Satelitarnej
 Systemy Telekomunikacji Satelitarnej część 1: Podstawy transmisji satelitarnej mgr inż. Krzysztof Włostowski Instytut Telekomunikacji PW chrisk@tele.pw.edu.pl Systemy telekomunikacji satelitarnej literatura
Systemy Telekomunikacji Satelitarnej część 1: Podstawy transmisji satelitarnej mgr inż. Krzysztof Włostowski Instytut Telekomunikacji PW chrisk@tele.pw.edu.pl Systemy telekomunikacji satelitarnej literatura
Przyswojenie wiedzy na temat serwisów systemu GPS i charakterystyk z nimi związanych
 C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE
 WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. Rysunek 1. Centrum monitoringu w Komendzie Miejskiej Policji w Gdańsku.
 System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. W Gdańsku tworzony jest obecnie miejski System Informacji Przestrzennej, który będzie stanowił podstawę m.in. Systemu Ratownictwa Miejskiego
System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. W Gdańsku tworzony jest obecnie miejski System Informacji Przestrzennej, który będzie stanowił podstawę m.in. Systemu Ratownictwa Miejskiego
Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP
 Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA
 Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p.
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p.
GEOMATYKA program podstawowy
 GEOMATYKA program podstawowy 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W celu ujednolicenia wyników pomiarów geodezyjnych, a co za tym idzie umożliwienia tworzenia
GEOMATYKA program podstawowy 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W celu ujednolicenia wyników pomiarów geodezyjnych, a co za tym idzie umożliwienia tworzenia
ANALIZA SZEREGÓW CZASOWYCH OBSERWACJI SATELITARNYCH WYKONYWANYCH Z WYKORZYSTANIEM SERWISU EGNOS
 INFRASTRUKTURA I EKOLOGIA TERENÓW WIEJSKICH INFRASTRUCTURE AND ECOLOGY OF RURAL AREAS Analiza szeregów czasowych... Nr 3/20, POLSKA AKADEMIA NAUK, Oddział w Krakowie, s. 25 258 Komisja Technicznej Infrastruktury
INFRASTRUKTURA I EKOLOGIA TERENÓW WIEJSKICH INFRASTRUCTURE AND ECOLOGY OF RURAL AREAS Analiza szeregów czasowych... Nr 3/20, POLSKA AKADEMIA NAUK, Oddział w Krakowie, s. 25 258 Komisja Technicznej Infrastruktury
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:") PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
GIS MOBILNY 3. Pozycjonowanie satelitarne
 GIS MOBILNY 3. Pozycjonowanie satelitarne Dr inż. Jan Blachowski Politechnika Wrocławska Instytut Górnictwa Zakład Geodezji i GIS Pl. Teatralny 2 tel (71) 320 68 73 GIS MOBILNY WYKŁAD.3 - SYLLABUS Parametry
GIS MOBILNY 3. Pozycjonowanie satelitarne Dr inż. Jan Blachowski Politechnika Wrocławska Instytut Górnictwa Zakład Geodezji i GIS Pl. Teatralny 2 tel (71) 320 68 73 GIS MOBILNY WYKŁAD.3 - SYLLABUS Parametry
ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM
 ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM Figurski M., Szafranek K., Araszkiewicz A., Szołucha M. Realizacja grantu
ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM Figurski M., Szafranek K., Araszkiewicz A., Szołucha M. Realizacja grantu
Cospa Cos s pa - Sa - Sa a rs t
 Od 1982 r. system centrów koordynacji ratownictwa Re Center (RCC), punktów kontaktowyc Rescue Points Of Contacts (SPOC) i koordynacji. satelity na orbitach geo tworzące system GEOSA przeszkody mogące
Od 1982 r. system centrów koordynacji ratownictwa Re Center (RCC), punktów kontaktowyc Rescue Points Of Contacts (SPOC) i koordynacji. satelity na orbitach geo tworzące system GEOSA przeszkody mogące
GEOMATYKA program rozszerzony
 GEOMATYKA program rozszerzony 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu źródło: http://www.esa.int/our_activities/observing_the_earth/goce Satelita GOCE Orbita:
GEOMATYKA program rozszerzony 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu źródło: http://www.esa.int/our_activities/observing_the_earth/goce Satelita GOCE Orbita:
Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi. Ewa Dyner Jelonkiewicz. ewa.dyner@agtes.com.pl Tel.
 TELEKOMUNIKACJA SATELITARNA-GOSPODARCZE I STRATEGICZNE KORZYŚCI DLA ADMINISTRACJI PUBLICZNEJ Warszawa, 12 grudnia 2014 Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi Ewa Dyner Jelonkiewicz
TELEKOMUNIKACJA SATELITARNA-GOSPODARCZE I STRATEGICZNE KORZYŚCI DLA ADMINISTRACJI PUBLICZNEJ Warszawa, 12 grudnia 2014 Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi Ewa Dyner Jelonkiewicz
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Załącznik nr 1 do SIWZ. Opis przedmiotu zamówienia
 Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Ograniczenia GPS. błędy spowodowane zmiennością opóźnień: jonosferycznego i troposferycznego, niedokładności efemeryd, błędy zegara satelity,
 DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Narzędzia wspierające system EGNOS Paweł Seliga
 Narzędzia wspierające system EGNOS Paweł Seliga 17 luty 2015 2 EGNOS Miasto, dnia 3 EGNOS - European Geostationary Navigation Overlay System Europejski system satelitarny wspomagający działanie systemów
Narzędzia wspierające system EGNOS Paweł Seliga 17 luty 2015 2 EGNOS Miasto, dnia 3 EGNOS - European Geostationary Navigation Overlay System Europejski system satelitarny wspomagający działanie systemów
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
CHARAKTERYSTYKA SYSTEMU WSPOMAGANIA POZYCJONOWANIA QZSS-ZENITH
 58 IAPGOŚ 4/2016 p-issn 2083-0157, e-issn 2391-6761 DOI: 10.5604/01.3001.0009.5191 CHARAKTERYSTYKA SYSTEMU WSPOMAGANIA POZYCJONOWANIA QZSS-ZENITH Kamil Krasuski 1,2 1 Zespół Technik Satelitarnych, Dęblin;
58 IAPGOŚ 4/2016 p-issn 2083-0157, e-issn 2391-6761 DOI: 10.5604/01.3001.0009.5191 CHARAKTERYSTYKA SYSTEMU WSPOMAGANIA POZYCJONOWANIA QZSS-ZENITH Kamil Krasuski 1,2 1 Zespół Technik Satelitarnych, Dęblin;
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji.
 Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
O technologii pomiarów GPS RTK (Real Time Kinematic)
") 1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT
 TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT CIEĆKO Adam 1 GRUNWALD Grzegorz 1 KAŹMIERCZAK Rafał 1 OSZCZAK Stanisław 1 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz
TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT CIEĆKO Adam 1 GRUNWALD Grzegorz 1 KAŹMIERCZAK Rafał 1 OSZCZAK Stanisław 1 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz
Zasada pracy różnicowego GPS - DGPS. dr inż. Paweł Zalewski
 Zasada pracy różnicowego GPS - DGPS dr inż. Paweł Zalewski Sformułowanie problemu W systemie GPS wykorzystywane są sygnały pomiaru czasu (timing signals) przynajmniej z trzech satelitów w celu ustalenia
Zasada pracy różnicowego GPS - DGPS dr inż. Paweł Zalewski Sformułowanie problemu W systemie GPS wykorzystywane są sygnały pomiaru czasu (timing signals) przynajmniej z trzech satelitów w celu ustalenia
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
System nawigacji satelitarnej Galileo oferta biznesowa
 System nawigacji satelitarnej Galileo oferta biznesowa Forum Satelitarne Marta Krywanis-Brzostowska European GNSS Agency Europejska Agencja GNSS (GSA) MISJA: wspomaganie UE w uzyskaniu możliwie wysokiego
System nawigacji satelitarnej Galileo oferta biznesowa Forum Satelitarne Marta Krywanis-Brzostowska European GNSS Agency Europejska Agencja GNSS (GSA) MISJA: wspomaganie UE w uzyskaniu możliwie wysokiego
Aplikacje Systemów. 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS. Gdańsk, 2015
 Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów. System zarządzania flotą pojazdów Nawigacja samochodowa GPS. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
TPI. Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne. Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych.
 AGENDA SPOTKANIA TPI Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych Pytania TPI TPI Grupa ponad 50 osób pracująca wraz z Tobą
AGENDA SPOTKANIA TPI Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych Pytania TPI TPI Grupa ponad 50 osób pracująca wraz z Tobą
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
GNSS niezbędnym etapem implementacji LUN (1)
") GNSS niezbędnym etapem implementacji LUN (1) Jest faktem znamiennym, że PAŻP jest: zainteresowana udziałem w projektach badawczych, których celem jest wdrożenie operacyjne systemów GPS i EGNOS do zastosowań
GNSS niezbędnym etapem implementacji LUN (1) Jest faktem znamiennym, że PAŻP jest: zainteresowana udziałem w projektach badawczych, których celem jest wdrożenie operacyjne systemów GPS i EGNOS do zastosowań
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK
 Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika