Zasada pracy różnicowego GPS - DGPS. dr inż. Paweł Zalewski
|
|
|
- Michał Czajka
- 10 lat temu
- Przeglądów:
Transkrypt


1 Zasada pracy różnicowego GPS - DGPS dr inż. Paweł Zalewski
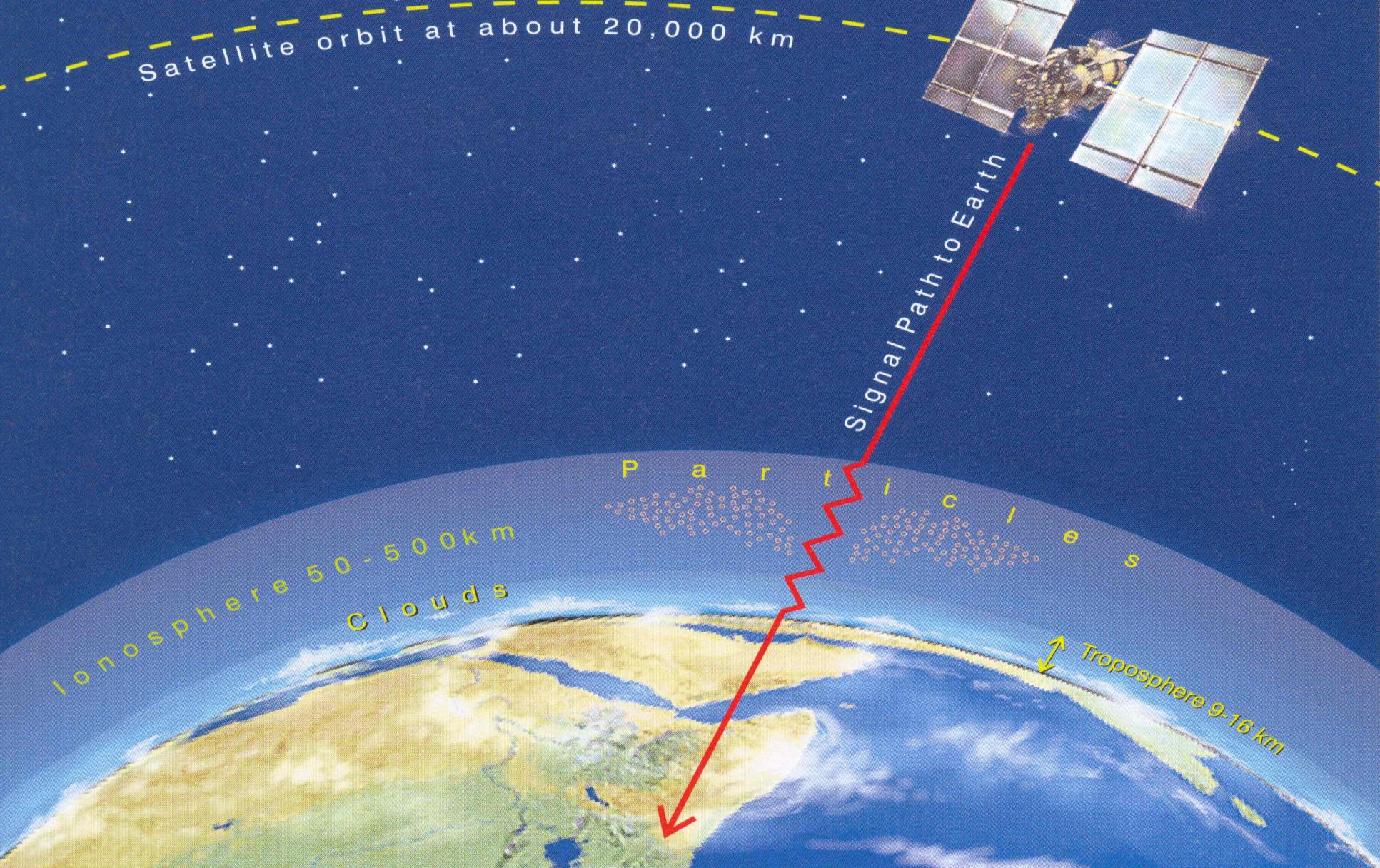
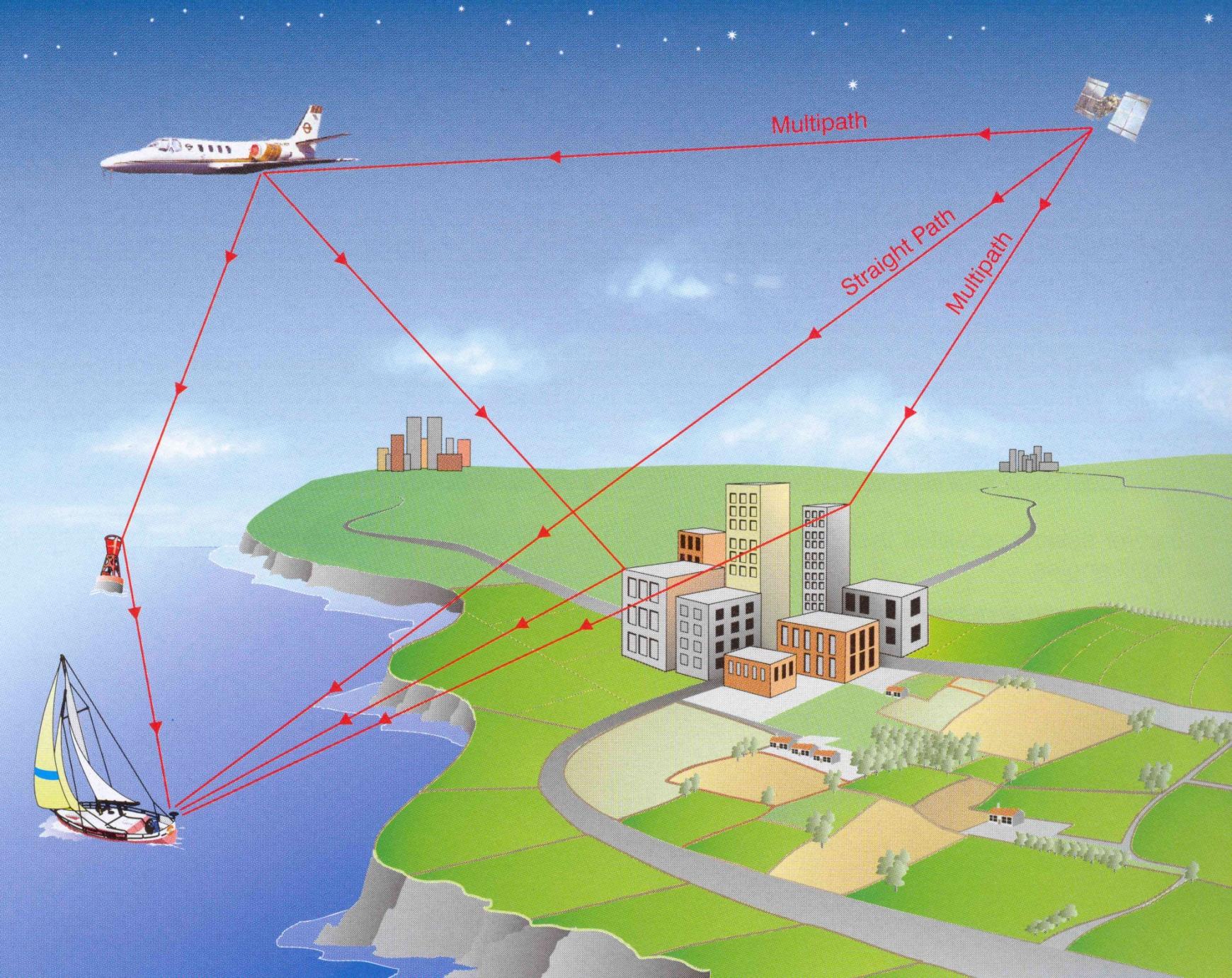
2 Sformułowanie problemu W systemie GPS wykorzystywane są sygnały pomiaru czasu (timing signals) przynajmniej z trzech satelitów w celu ustalenia pozycji, przy czym każdy z tych sygnałów obarczony jest indywidualnym zestawem błędów. Moment startu sygnału może być przesunięty w wyniku niedokładności zegarów satelitarnych oraz różnicy pomiędzy teoretycznym a rzeczywistym położeniem satelity na orbicie. Następnie podczas podróży w kierunku Ziemi sygnał ulega refrakcji w atmosferze (ionosphere and troposphere delays) i odbiciom od obiektów znajdujących się w pobliżu anteny odbiornika (tzw. wielotorowość sygnału - multipath). Występujące błędy, poza wielotorowością, mogą zostać skorygowane w wyniku zastosowania techniki różnicowej (differential technique).
3 Sformułowanie problemu

4 Źródła błędów w systemie GPS: Sformułowanie problemu
5 Sformułowanie problemu
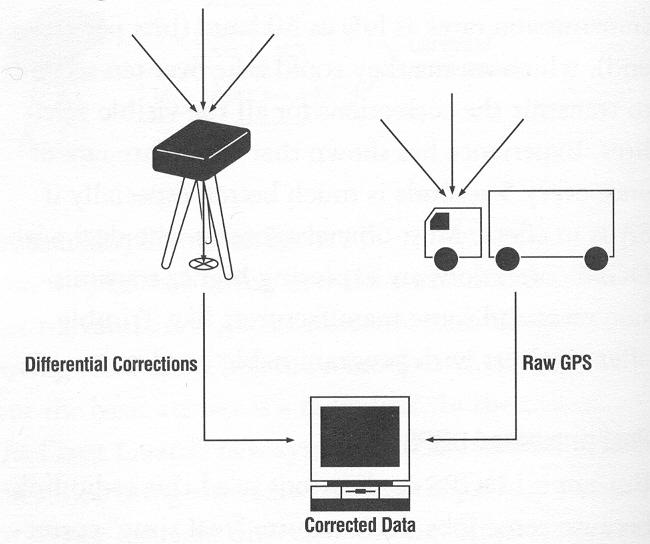
6 Rozwiązanie problemu Różnicowy GPS oparty jest na koncepcji występowania takich samych lub prawie takich samych błędów pomiaru w pewnym obszarze dookoła pozycji odniesienia (referencyjnej). Jeżeli dwa odbiorniki znajdują się na powierzchni Ziemi, w odległości kilkuset kilometrów od siebie, to docierające do nich sygnały satelitarne przechodzą przez praktycznie ten sam rejon atmosfery i obarczone są tymi samymi błędami propagacji. Poza błędami wielotorowości i szumami własnymi (receiver s noise) pozostałe wartości błędów będą wspólne dla obu odbiorników. W takiej sytuacji jeden z odbiorników może zostać użyty do pomiaru wartości błędów, a następnie do przekazania ich drugiemu odbiornikowi.
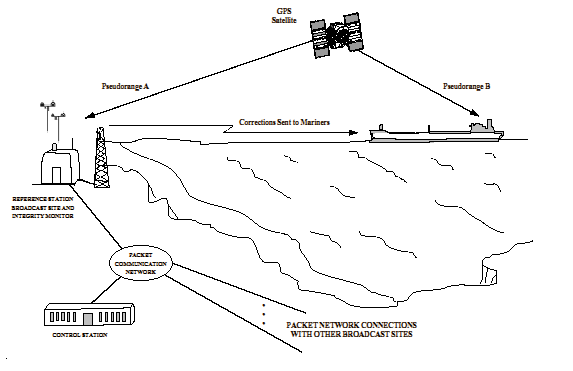
7 Komponenty systemu DGPS stacja referencyjna (stacja odniesienia lub różnicowa - reference station) stacja ruchoma (odbiornik użytkownika - rover, mobile station) łącze transmisji danych (data link)


8 Stacja referencyjna W różnicowym GPS jeden z odbiorników umieszczony zostaje w punkcie geodezyjnym - o dokładnie wyznaczonej pozycji 3D. W takiej stacji referencyjnej na podstawie znajomości położeń satelitów na orbicie i znajomości swojej pozycji wyznaczona zostaje teoretyczna odległość pomiędzy anteną stacji a satelitą. Po porównaniu tej odległości z pseudoodległością zmierzoną w rzeczywistości (przez odbiornik GPS), otrzymana różnica stanowi poprawkę różnicową [m].
9 Stacja referencyjna W teorii poprawki różnicowe w stacji referencyjnej mogą być wyznaczane na dwa sposoby jako: błędy pozycji 3D (metoda pojedynczego punktu), błędy poszczególnych pseudoodległości (metoda poprawiania indywidualnych odległości do satelitów): d d B B p p B B p p A A c t Metody te dają analogiczne rezultaty tylko w jednym przypadku - gdy sygnały wykorzystywane do wyznaczenia pozycji pochodzą z tych samych satelitów zarówno w stacji referencyjnej (reference or base station) jak i odbiorniku ruchomym (rover or mobile station)! A c t B c t s
10 Stacja referencyjna Jest kilka przyczyn, dla których wymieniony warunek w praktyce jest niespełniony: inne kryterium doboru satelitów w odbiornikach (np. 5 kanałów i 12 kanałów), różna geometria satelitów w obu stacjach wynikająca z odległości pomiędzy stacjami, czego rezultatem są różne czasy wschodu i zachodu dla poszczególnych satelitów, ukształtowanie terenu blokujące sygnał w pobliżu stacji, odbiorniki w obu stacjach niekoniecznie muszą używać wszystkich obserwowanych satelitów do wyznaczenia pozycji.
11 Poprawka pseudoodległości Z tych powodów w stacjach referencyjnych stosuje się drugą metodę generując indywidualne poprawki pseudoodległościowe dla wszystkich obserwowanych ze stacji satelitów. Oprócz poprawek różnicowych, obliczane są także szybkości ich zmiany (pierwsza pochodna poprawki), które służą stacji ruchomej do modelowania tendencji zmiany wartości poprawek w czasie, w okresie od wyznaczenia poprawki w stacji referencyjnej do odbioru kolejnej poprawki do tego samego satelity w odbiorniku ruchomym (tzw. wiek poprawki - the age of correction, AOC). Czyli w odbiorniku ruchomym, do zmierzonej pseudoodległości dodawana jest z odpowiednim znakiem poprawka zmienna - ekstrapolowana (poprawiana) w czasie!
12 Poprawka pseudoodległości W odbiorniku DGPS, w skład którego wchodzą: antena z odbiornikiem GPS oraz odbiornik poprawek różnicowych pracujący na określonym rodzaju łącza radiowego, następuje dodanie sumarycznej poprawki do zmierzonej pseudoodległości: gdzie: p B ( t1 ) pa( t0) dp A t1 t dt 0 p B ( t 1 ) p A ( t 0 ) dp A t 1 t 0 dt - wartość poprawki do odp. pseudoodległości - wartość poprawki wyzn. w stacji referencyjnej - poprawka na szybkość zmiany pseudoodległości
13 Stosowanie poprawek metoda różnicowania w czasie nierzeczywistym (postprocessing) polega na korygowaniu pozycji za pomocą poprawek różnicowych po zakończeniu sesji pomiarowej; wykonywane jest to na podstawie pomiarów zarejestrowanych w stacji odniesienia i w miejscu odbiornika użytkownika (stacji ruchomej) stosując standard rejestracji i transmisji danych określony przez producenta odbiorników i oprogramowania rejestratorów, metoda różnicowania w czasie rzeczywistym (real-time), w której korygowanie pomiarów prowadzone jest w czasie rzeczywistym poprzez transmisję poprawek różnicowych do odbiornika użytkownika drogą radiową wykorzystując odpowiedni standard łącza transmisji danych (data link).

14 Stosowanie poprawek Real-Time Post-Processed
15 Łącze transmisji danych Idealne łącze powinno przekazywać dane z minimalnym opóźnieniem i bez straty informacji. Praktycznie jest to niemożliwe, a wybór łącza jest kompromisem pomiędzy zasięgiem, szybkością transmisji i kosztami budowy i eksploatacji. Najistotniejszym z tych kryteriów jest przepustowość łącza (szybkość transmisji), gdyż w zasadniczy sposób wpływa na dokładność określanej pozycji w systemie DGPS. Duża przepustowość umożliwia krótki czas transmisji poprawek, co w efekcie daje krótki interwał ekstrapolacji poprawek. Przepustowość łącza radiowego jest definiowana jako liczba bitów możliwych do przesłania w czasie jednej sekundy.
16 Łącze transmisji danych Ogólnie relację między okresem uaktualniania poprawek różnicowych, długością depeszy i przepustowością łącza można przedstawić następująco: gdzie: R L B P R - okres uaktualniania poprawek różnicowych w odbiorniku wyrażony w sekundach; L - całkowita długość depeszy dotyczącej danego momentu obserwacji satelitarnej wyrażona w bitach; B - przepustowość łącza transmisyjnego wyrażona w bodach; P - zakładane prawdopodobieństwo odbioru poprawnej informacji.
17 Łącze transmisji danych Łącze IALA pracujące w zakresie częstotliwości LF: kHz (zakres pracy radiolatarń morskich). Maksymalny zasięg radiowy transmisji wynosi około 400km, a maksymalna prędkość transmisji 200 bodów. Propagacja fali przyziemnej narażona jest na wpływ zakłóceń od fali jonosferycznej i atmosferycznych. Łącze pracujące w zakresie fal VHF charakteryzujące się zasięgiem horyzontalnym, szybką i stabilną transmisją danych oraz brakiem wpływu zakłóceń atmosferycznych. Łącze sieci komórkowych j. w. Łącze pracujące na częstotliwości UHF rzędu 1.5 GHz wykorzystywane przez satelity geostacjonarne systemów WAAS, MSAS, EGNOS, OmniStar, Landstar oraz tzw. pseudolites. Łącze charakteryzuje się dużym zasięgiem i dużą prędkością transmisji danych. Koszty eksploatacji tego typu łącza są bardzo wysokie. Wykorzystuje zwielokrotnienie stacji ref.
18 Łącze transmisji danych Ważnym elementem łącza radiowego jest dobór rodzaju modulacji. W przypadku łącza IALA wykorzystana została modulacja MSK (Minimum Shift Keying) ze względu na to, że wymaga ona najmniejszej szerokości pasma przenoszenia i jednocześnie zapewnia brak interferencji z radiolatarniami pracującymi w pobliżu oraz pracą do celów radionamierzania. Oprócz odpowiedniego doboru częstotliwości i rodzaju modulacji, czynnikiem warunkującym szybką i bezbłędną transmisję danych jest przyjęcie odpowiedniego formatu ich przesyłania.
19 Łącze transmisji danych Dla operatorów systemu DGPS koniecznością stało się stosowanie standardowego formatu depeszy różnicowej. Standard taki został zarekomendowany przez Specjalny Komitet 104 Komisji Radiotechnicznej Służb Morskich (Radio Technical Commission for Maritime Services Special Committee 104 (RTCM SC-104)) i po raz pierwszy opublikowany w listopadzie 1987r. Format danych oparto na depeszy nawigacyjnej GPS, stosując ten sam rozmiar i format słowa oraz algorytm wykrywania błędów transmisji EDAC (Error Detection and Correction). W stosowanej aktualnie wersji 2.0 formatu RTCM SC-104 możliwe jest użycie 64 różnych typów wiadomości różnicowych.
20 Typy wiadomości różnicowych RTCM Message Type Message Title 1 DGPS corrections 2 Delta DGPS corrections 3 Reference station parameters 4 Carrier surveying information 5 Constellation health 6 Null frame 7 Marine radiobeacon almanacs 8 Pseudolite almanacs 9 High rate DGPS corrections 10 P code DGPS corrections 11 C/A code L1/L2 delta corrections 12 Pseudolite station parameters 13 Ground transmitter parameters 14 Surveying auxiliary message 15 Ionospheric/tropospheric message 16 Special message 17 Ephemeris almanac Undefined (RTK and others) Differential Loran C messages
21 Typy wiadomości różnicowych RTCM Wiadomość typu 1 zawiera zestaw poprawek pseudoodległości oraz szybkości ich zmian dla wszystkich obserwowanych w stacji referencyjnej satelitów, wydanie danych efemerydalnych (the issue of data ephemeris (IODE)) i wartość błędu UDRE (the user differential range error). Parametr IODE pozwala stacji ruchomej na zidentyfikowanie satelitarnych danych nawigacyjnych użytych w stacji referencyjnej - jeżeli są one różne od własnych to powinny zostać uwzględnione poprawki Delta (typ 2). UDRE jest wartością odchylenia standardowego (standard deviation) błędu poprawki różnicowej (differential error) obliczoną w stacji referencyjnej, która może być użyta do oceny jakości wyznaczonej w odbiorniku ruchomym pozycji.
22 Czynniki warunkujące poprawność odbioru wiadomości różnicowych RTCM Jakość transmisji poprawek zależy od następujących czynników (pomijając częstotliwość i rodzaj modulacji): - czynników propagacyjnych: propagacja fali radiowej, przewodność podłoża, moc nadawcza, - zakłóceń: zakłócenia atmosferyczne, zakłócenia elektrostatyczne (nagromadzenie ładunku elektrostatycznego), zakłócenia przemysłowe (agregaty, spawarki, urządzenia iskrzące). Aby odebrać poprawki musi być zachowany wymagany stosunek sygnału stacji referencyjnej do szumu (SNR).
23 Czynniki warunkujące poprawność odbioru wiadomości różnicowych RTCM Sygnał z radiolatarni dociera na fali przyziemnej. Natężenie pola elektromagnetycznego fali przyziemnej zależy od mocy nadawczej i przewodności podłoża. Przewodność ziemi jest bardziej zmienna i generalnie mniejsza niż wody morskiej. Zakłócenia atmosferyczne wpływają na jakość transmisji, a ich natężenie zależy od pory roku i dnia oraz pozycji. Możliwość odbioru sygnału zależy także od stosunku sygnał/szum w miejscu odbiornika. Kodowanie informacji w metodzie EDAC pozwala odbierać sygnały przy mniejszych wartościach SNR. Aby jakość odbioru sięgała 99.7% danych przesyłanych w standardzie RTCM, minimalna wartość SNR wynosi 10dB bez kodowania EDAC i 5dB w przypadku stosowania EDAC.
24 Zwielokrotnienie stacji referencyjnych Przy jednoczesnym wykorzystaniu kilku stacji referencyjnych (multiple reference station solution) wszystkie odebrane poprawki pseudoodległości mogą być użyte do wyznaczenia pozycji. W tym celu stosowane są cztery metody: centroid approach - na podstawie poprawek pseudoodległości ze wszystkich stacji referencyjnych wyznaczana jest jedna poprawka dla każdego śledzonego satelity; ta poprawka jest właściwą dla środka obszaru pokrytego przez stacje referencyjne; dodatkowa poprawka kierunkowa (offset) może zostać wyznaczona w wyniku korelacji składowych poprawki centralnej z poprawkami z poszczególnych stacji referencyjnych,
25 Zwielokrotnienie stacji referencyjnych all-in-view approach wszystkie poprawki pseudoodległościowe są przyjmowane do wyznaczenia pozycji bez obróbki wstępnej (za wyjątkiem sprawdzenia ich ważności - wiek!!); dla przykładu poprawka dla satelity PRN 12 może być otrzymana z 4 różnych stacji referencyjnych dając w rezultacie nie jedną a 4 poprawione odległości (linie pozycyjne) do wyznaczenia pozycji, position domain approach jest metodą polegającą na niezależnym wyznaczeniu pozycji na podstawie rozdzielonych poprawek różnicowych z każdej odbieranej stacji referencyjnej; wypadkowa pozycja jest rezultatem średniej ważonej wszystkich wyznaczonych pozycji,
26 Zwielokrotnienie stacji referencyjnych wide area DGPS (WADGPS) - w tej metodzie nie wykorzystuje się już koncepcji jednej poprawki do danej pseudoodległości, może ona zapewnić dokładności rzędu 5m (95%) na obszarach kilku tysięcy kilometrów. Obserwacje z sieci stacji referencyjnych zbierane są w serwerze, którego zadaniem jest rozbicie błędów pseudoodległości na ich poszczególne składowe modelowane w czasie rzeczywistym; poprawki orbitalne, atmosferyczne i zegarów satelitarnych dla każdego satelity są następnie cyklicznie przesyłane do stacji ruchomej.
27 Dokładność systemu DGPS Błąd pseudoodległości w GPS / DGPS przy załączonym SA dla długości linii bazy pomiędzy stacją referencyjną a stacjami ruchomymi równą 500km i wieku poprawek < 5s: Error Source Stand-alone [m] Differential [m] User Independent Satellite clock Ephemeris Orbit Ionosphere Troposphere User Dependent Multipath Receiver noise Total root sum squared
28 Podsumowanie
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Ograniczenia GPS. błędy spowodowane zmiennością opóźnień: jonosferycznego i troposferycznego, niedokładności efemeryd, błędy zegara satelity,
 DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy i Sieci Radiowe
 Systemy i Sieci Radiowe Wykład 4 Media transmisyjne część Program wykładu Widmo sygnałów w. cz. Modele i tryby propagacji Anteny Charakterystyka kanału radiowego zjawiska propagacyjne 1 Transmisja radiowa
Systemy i Sieci Radiowe Wykład 4 Media transmisyjne część Program wykładu Widmo sygnałów w. cz. Modele i tryby propagacji Anteny Charakterystyka kanału radiowego zjawiska propagacyjne 1 Transmisja radiowa
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS)
") Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE
 WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie Przeznaczenie i zastosowania GPS: Pełna nazwa systemu to NAVSTAR GPS od
Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie Przeznaczenie i zastosowania GPS: Pełna nazwa systemu to NAVSTAR GPS od
Naziemne systemy nawigacyjne. Wykorzystywane w nawigacji
 Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
O technologii pomiarów GPS RTK (Real Time Kinematic)
") 1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
RADIONAMIARY. zasady, sposoby, kalibracja, błędy i ograniczenia
 RADIONAMIARY zasady, sposoby, kalibracja, błędy i ograniczenia 1 Radionamierzanie jest to: Określenie kąta, zawartego między północną częścią lokalnego południka geograficznego a kierunkiem na dany obiekt,
RADIONAMIARY zasady, sposoby, kalibracja, błędy i ograniczenia 1 Radionamierzanie jest to: Określenie kąta, zawartego między północną częścią lokalnego południka geograficznego a kierunkiem na dany obiekt,
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Linia pozycyjna. dr inż. Paweł Zalewski. w radionawigacji
 Linia pozycyjna dr inż. Paweł Zalewski w radionawigacji Wprowadzenie Jednym z zadań nawigacji jest określenie pozycji jednostki ruchomej - człowieka, pojazdu, statku czy samolotu. Pozycję ustala się przez
Linia pozycyjna dr inż. Paweł Zalewski w radionawigacji Wprowadzenie Jednym z zadań nawigacji jest określenie pozycji jednostki ruchomej - człowieka, pojazdu, statku czy samolotu. Pozycję ustala się przez
Sygnał vs. szum. Bilans łącza satelitarnego. Bilans energetyczny łącza radiowego. Paweł Kułakowski. Zapewnienie wystarczającej wartości SNR :
 Sygnał vs. szum Bilans łącza satelitarnego Paweł Kułakowski Bilans energetyczny łącza radiowego Zapewnienie wystarczającej wartości SNR : 1 SNR i E b /N 0 moc sygnału (czasem określana jako: moc nośnej
Sygnał vs. szum Bilans łącza satelitarnego Paweł Kułakowski Bilans energetyczny łącza radiowego Zapewnienie wystarczającej wartości SNR : 1 SNR i E b /N 0 moc sygnału (czasem określana jako: moc nośnej
1.1 Wprowadzenie. 1.2 Cechy produktu
 INSTRUKCJA OBSŁUGI ODBIORNIKA GPS GR-213 1.1 Wprowadzenie Kompaktowy odbiornik GPS na magistrali USB do podłączenia do notebooka lub PC. Odbiornik ustala pozycję w oparciu o informację z 20 satelitów,
INSTRUKCJA OBSŁUGI ODBIORNIKA GPS GR-213 1.1 Wprowadzenie Kompaktowy odbiornik GPS na magistrali USB do podłączenia do notebooka lub PC. Odbiornik ustala pozycję w oparciu o informację z 20 satelitów,
Podstawy transmisji sygnałów
 Podstawy transmisji sygnałów 1 Sygnał elektromagnetyczny Jest funkcją czasu Może być również wyrażony jako funkcja częstotliwości Sygnał składa się ze składowych o róznych częstotliwościach 2 Koncepcja
Podstawy transmisji sygnałów 1 Sygnał elektromagnetyczny Jest funkcją czasu Może być również wyrażony jako funkcja częstotliwości Sygnał składa się ze składowych o róznych częstotliwościach 2 Koncepcja
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Systemy satelitarne Paweł Kułakowski
 Systemy satelitarne Paweł Kułakowski Kwestie organizacyjne Prowadzący wykłady: Paweł Kułakowski D5 pokój 122, telefon: 617 39 67 e-mail: kulakowski@kt.agh.edu.pl Wykłady: czwartki godz. 12:30 14:00 Laboratorium
Systemy satelitarne Paweł Kułakowski Kwestie organizacyjne Prowadzący wykłady: Paweł Kułakowski D5 pokój 122, telefon: 617 39 67 e-mail: kulakowski@kt.agh.edu.pl Wykłady: czwartki godz. 12:30 14:00 Laboratorium
Propagacja wielodrogowa sygnału radiowego
 Propagacja wielodrogowa sygnału radiowego Paweł Kułakowski Linie radiowe 2006 www.kt.ag.edu.pl/~brus/linie_radiowe Plan wykładu. Wprowadzenie zjawisko propagacji wielodrogowej, modele kanału radiowego
Propagacja wielodrogowa sygnału radiowego Paweł Kułakowski Linie radiowe 2006 www.kt.ag.edu.pl/~brus/linie_radiowe Plan wykładu. Wprowadzenie zjawisko propagacji wielodrogowej, modele kanału radiowego
Fizyczne podstawy działania telefonii komórkowej
 Fizyczne podstawy działania telefonii komórkowej Tomasz Kawalec 12 maja 2010 Zakład Optyki Atomowej, Instytut Fizyki UJ www.coldatoms.com Tomasz Kawalec Festiwal Nauki, IF UJ 12 maja 2010 1 / 20 Podstawy
Fizyczne podstawy działania telefonii komórkowej Tomasz Kawalec 12 maja 2010 Zakład Optyki Atomowej, Instytut Fizyki UJ www.coldatoms.com Tomasz Kawalec Festiwal Nauki, IF UJ 12 maja 2010 1 / 20 Podstawy
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
Recenzja Rozprawy doktorskiej mgr int Pawła Przestrzelskiego pt.: Sieciowe pozycjonowanie różnicowe z wykorzystaniem obserwacji GPS i GLONASS"
 *jp"
*jp"
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
Serwisy postprocessingu POZGEO i POZGEO D
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
Systemy Bezprzewodowe. Paweł Kułakowski
 Systemy Bezprzewodowe Paweł Kułakowski Tematyka kursu - lata komunikacji bezprzewodowej Gwałtowny rozwój sieci bezprzewodowych w ostatnich latach: rozwój urządzeń (smartfony, tablety, laptopy) i aplikacji
Systemy Bezprzewodowe Paweł Kułakowski Tematyka kursu - lata komunikacji bezprzewodowej Gwałtowny rozwój sieci bezprzewodowych w ostatnich latach: rozwój urządzeń (smartfony, tablety, laptopy) i aplikacji
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim
 Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim Paweł Tabęcki Biuro Geodety Województwa Mazowieckiego Dział Katastralnej Bazy Danych sierpień 2006 Plan prezentacji
Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim Paweł Tabęcki Biuro Geodety Województwa Mazowieckiego Dział Katastralnej Bazy Danych sierpień 2006 Plan prezentacji
Odbiór sygnału satelitarnego. Satelity telekomunikacyjne
 Odbiór sygnału satelitarnego. Nadawanie i odbiór sygnału telewizyjnego lub radiowego, może odbywać się metodą tradycyjną (transmisja naziemna) lub drogą satelitarną. Przenoszenie informacji za pomocą sygnału
Odbiór sygnału satelitarnego. Nadawanie i odbiór sygnału telewizyjnego lub radiowego, może odbywać się metodą tradycyjną (transmisja naziemna) lub drogą satelitarną. Przenoszenie informacji za pomocą sygnału
ZAKŁAD SYSTEMÓW ELEKTRONICZNYCH I TELEKOMUNIKACYJNYCH Laboratorium Podstaw Telekomunikacji WPŁYW SZUMÓW NA TRANSMISJĘ CYFROWĄ
 Laboratorium Podstaw Telekomunikacji Ćw. 4 WPŁYW SZUMÓW NA TRANSMISJĘ CYFROWĄ 1. Zapoznać się z zestawem do demonstracji wpływu zakłóceń na transmisję sygnałów cyfrowych. 2. Przy użyciu oscyloskopu cyfrowego
Laboratorium Podstaw Telekomunikacji Ćw. 4 WPŁYW SZUMÓW NA TRANSMISJĘ CYFROWĄ 1. Zapoznać się z zestawem do demonstracji wpływu zakłóceń na transmisję sygnałów cyfrowych. 2. Przy użyciu oscyloskopu cyfrowego
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
System 1200 Newsletter Nr 54 Sieci RTK - Przykłady studialne
 NEWSLETTERY SIECI RTK - PRZYPOMNIENIE Niniejszy numer Newslettera kończy trzyczęściową serię dotyczącą sieci RTK. Zanim zagłębimy się w szczegóły tego numeru przypomnimy tematy dwóch poprzednich numerów.
NEWSLETTERY SIECI RTK - PRZYPOMNIENIE Niniejszy numer Newslettera kończy trzyczęściową serię dotyczącą sieci RTK. Zanim zagłębimy się w szczegóły tego numeru przypomnimy tematy dwóch poprzednich numerów.
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu. 20 maja, 2016 R. Krenz 1
 Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
Źródła błędów w pomiarach GNSS (na podstawie Bosy J., 2005) dr inż. Paweł Zalewski Akademia Morska w Szczecinie
 dr inż. Paweł Zalewski Akademia Morska w Szczecinie") Źródła błędów w pomiarach GNSS (na podstawie Bosy J., 2005) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Źródła błędów w pomiarach GNSS: Błędy wyznaczania pozycji w systemach zaliczanych do GNSS
Źródła błędów w pomiarach GNSS (na podstawie Bosy J., 2005) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Źródła błędów w pomiarach GNSS: Błędy wyznaczania pozycji w systemach zaliczanych do GNSS
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Bezprzewodowe sieci komputerowe
 Bezprzewodowe sieci komputerowe Dr inż. Bartłomiej Zieliński Różnice między sieciami przewodowymi a bezprzewodowymi w kontekście protokołów dostępu do łącza Zjawiska wpływające na zachowanie rywalizacyjnych
Bezprzewodowe sieci komputerowe Dr inż. Bartłomiej Zieliński Różnice między sieciami przewodowymi a bezprzewodowymi w kontekście protokołów dostępu do łącza Zjawiska wpływające na zachowanie rywalizacyjnych
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Propagacja fal w środowisku mobilnym
 Propagacja fal w środowisku mobilnym Spektrum fal radiowych Prędkość, długość, częstotliwość fali Prędkość światła=długość fali x częstotliwość = =3 x 10 8 m/s =300 000 km/s Typy fal Propagacja fali przyziemnej
Propagacja fal w środowisku mobilnym Spektrum fal radiowych Prędkość, długość, częstotliwość fali Prędkość światła=długość fali x częstotliwość = =3 x 10 8 m/s =300 000 km/s Typy fal Propagacja fali przyziemnej
Sieci Bezprzewodowe. Systemy modulacji z widmem rozproszonym. DSSS Direct Sequence. DSSS Direct Sequence. FHSS Frequency Hopping
 dr inż. Krzysztof Hodyr Sieci Bezprzewodowe Część 2 Systemy modulacji z widmem rozproszonym (spread spectrum) Parametry warunkujące wybór metody modulacji Systemy modulacji z widmem rozproszonym Zjawiska
dr inż. Krzysztof Hodyr Sieci Bezprzewodowe Część 2 Systemy modulacji z widmem rozproszonym (spread spectrum) Parametry warunkujące wybór metody modulacji Systemy modulacji z widmem rozproszonym Zjawiska
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Ocena dokładności wskazań odbiornika Leica MK10 DGPS Szczecin 2011 Temat: Ocena zmienności
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Ocena dokładności wskazań odbiornika Leica MK10 DGPS Szczecin 2011 Temat: Ocena zmienności
WYBRANE ELEMENTY GEOFIZYKI
 WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
AGROCOM system jazdy równoległej
 AGROCOM system jazdy równoległej Jerzy Koronczok Agrocom Polska. Oprogramowanie i nowe możliwości dla rolnictwa. 47-120 Żędowice GPS systemy prowadzenia równoległego Agrocom E-DRIVE: Nowości Baseline HD
AGROCOM system jazdy równoległej Jerzy Koronczok Agrocom Polska. Oprogramowanie i nowe możliwości dla rolnictwa. 47-120 Żędowice GPS systemy prowadzenia równoległego Agrocom E-DRIVE: Nowości Baseline HD
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Rozkład poprawek EGNOS w czasie
 KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
2. STRUKTURA RADIOFONICZNYCH SYGNAŁÓW CYFROWYCH
 1. WSTĘP Radiofonię cyfrową cechują strumienie danych o dużych przepływnościach danych. Do przesyłania strumienia danych o dużych przepływnościach stosuje się transmisję z wykorzystaniem wielu sygnałów
1. WSTĘP Radiofonię cyfrową cechują strumienie danych o dużych przepływnościach danych. Do przesyłania strumienia danych o dużych przepływnościach stosuje się transmisję z wykorzystaniem wielu sygnałów
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Opracowanie na postawie: Frank Karlsen, Nordic VLSI, Zalecenia projektowe dla tanich systemów, bezprzewodowej transmisji danych cyfrowych, EP
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Opracowanie na postawie: Frank Karlsen, Nordic VLSI, Zalecenia projektowe dla tanich systemów, bezprzewodowej transmisji danych cyfrowych, EP
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Układy transmisji bezprzewodowej w technice scalonej, wybrane zagadnienia
 Układy transmisji bezprzewodowej w technice scalonej, wybrane zagadnienia Evatronix S.A. 6 maja 2013 Tematyka wykładów Wprowadzenie Tor odbiorczy i nadawczy, funkcje, spotykane rozwiazania wady i zalety,
Układy transmisji bezprzewodowej w technice scalonej, wybrane zagadnienia Evatronix S.A. 6 maja 2013 Tematyka wykładów Wprowadzenie Tor odbiorczy i nadawczy, funkcje, spotykane rozwiazania wady i zalety,
BER = f(e b. /N o. Transmisja satelitarna. Wskaźniki jakości. Transmisja cyfrowa
 Transmisja satelitarna Wskaźniki jakości Transmisja cyfrowa Elementowa stopa błędów (Bit Error Rate) BER = f(e b /N o ) Dostępność łącza Dla żądanej wartości BER. % czasu w roku, w którym założona jakość
Transmisja satelitarna Wskaźniki jakości Transmisja cyfrowa Elementowa stopa błędów (Bit Error Rate) BER = f(e b /N o ) Dostępność łącza Dla żądanej wartości BER. % czasu w roku, w którym założona jakość
Globalny Nawigacyjny System Satelitarny GPS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
ODORYMETRIA. Joanna Kośmider. Ćwiczenia laboratoryjne i obliczenia. Część I ĆWICZENIA LABORATORYJNE. Ćwiczenie 1 POMIARY EMISJI ODORANTÓW
 Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Oddział we Wrocławiu. Zakład Kompatybilności Elektromagnetycznej (Z-21)
") Oddział we Wrocławiu Zakład Kompatybilności Elektromagnetycznej (Z-21) Metody badania wpływu zakłóceń systemów radiowych następnych generacji (LTE, IEEE 802.22, DAB+, DVB-T) na istniejące środowisko radiowe
Oddział we Wrocławiu Zakład Kompatybilności Elektromagnetycznej (Z-21) Metody badania wpływu zakłóceń systemów radiowych następnych generacji (LTE, IEEE 802.22, DAB+, DVB-T) na istniejące środowisko radiowe
TPI. Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne. Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych.
 AGENDA SPOTKANIA TPI Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych Pytania TPI TPI Grupa ponad 50 osób pracująca wraz z Tobą
AGENDA SPOTKANIA TPI Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych Pytania TPI TPI Grupa ponad 50 osób pracująca wraz z Tobą
Systemy i Sieci Radiowe
 Systemy i Sieci Radiowe Wykład 3 Media transmisyjne część 1 Program wykładu transmisja światłowodowa transmisja za pomocą kabli telekomunikacyjnych (DSL) transmisja przez sieć energetyczną transmisja radiowa
Systemy i Sieci Radiowe Wykład 3 Media transmisyjne część 1 Program wykładu transmisja światłowodowa transmisja za pomocą kabli telekomunikacyjnych (DSL) transmisja przez sieć energetyczną transmisja radiowa
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
Załącznik nr 1 do SIWZ. Opis przedmiotu zamówienia
 Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 11
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Cyfrowa transmisja pasmowa kluczowanie amplitudy. Numer
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Cyfrowa transmisja pasmowa kluczowanie amplitudy. Numer
System trankingowy. Stacja wywołująca Kanał wolny Kanał zajęty
 SYSTEMY TRANKINGOWE Systemy trankingowe Tranking - automatyczny i dynamiczny przydział kanałów (spośród wspólnego i ograniczone do zbioru kanałów) do realizacji łączności pomiędzy dużą liczbę użytkowników
SYSTEMY TRANKINGOWE Systemy trankingowe Tranking - automatyczny i dynamiczny przydział kanałów (spośród wspólnego i ograniczone do zbioru kanałów) do realizacji łączności pomiędzy dużą liczbę użytkowników
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
POMIARY TŁUMIENIA I ABSORBCJI FAL ELEKTROMAGNETYCZNYCH
 LŁ ELEKTRONIKI WAT POMIARY TŁUMIENIA I ABSORBCJI FAL ELEKTROMAGNETYCZNYCH dr inż. Leszek Nowosielski Wojskowa Akademia Techniczna Wydział Elektroniki Laboratorium Kompatybilności Elektromagnetycznej LŁ
LŁ ELEKTRONIKI WAT POMIARY TŁUMIENIA I ABSORBCJI FAL ELEKTROMAGNETYCZNYCH dr inż. Leszek Nowosielski Wojskowa Akademia Techniczna Wydział Elektroniki Laboratorium Kompatybilności Elektromagnetycznej LŁ
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 5
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Cyfrowa transmisja pasmowa. Numer ćwiczenia: 5 Laboratorium
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Cyfrowa transmisja pasmowa. Numer ćwiczenia: 5 Laboratorium
Szerokopasmowy dostęp do Internetu Broadband Internet Access. dr inż. Stanisław Wszelak
 Szerokopasmowy dostęp do Internetu Broadband Internet Access dr inż. Stanisław Wszelak Rodzaje dostępu szerokopasmowego Technologia xdsl Technologie łączami kablowymi Kablówka Technologia poprzez siec
Szerokopasmowy dostęp do Internetu Broadband Internet Access dr inż. Stanisław Wszelak Rodzaje dostępu szerokopasmowego Technologia xdsl Technologie łączami kablowymi Kablówka Technologia poprzez siec
EEGS. możliwości poprawy jakości systemu EGNOS. EGNOS Extension to Eastern Europe. 04 czerwca 2011 Wrocław
 EEGS możliwości poprawy jakości systemu EGNOS 04 czerwca 011 Wrocław R.Zdunek, J. Zielioski, M.Krywanis-Brzostowska PLAN O projekcie Testy Statyczne Kinematyczne Metody poprawy jakości systemu EGNOS Kontynuacja
EEGS możliwości poprawy jakości systemu EGNOS 04 czerwca 011 Wrocław R.Zdunek, J. Zielioski, M.Krywanis-Brzostowska PLAN O projekcie Testy Statyczne Kinematyczne Metody poprawy jakości systemu EGNOS Kontynuacja
Aplikacje Systemów. 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS. Gdańsk, 2015
 Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów. System zarządzania flotą pojazdów Nawigacja samochodowa GPS. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych LABORATORIUM RADIONAWIGACJI Szczecin
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych LABORATORIUM RADIONAWIGACJI Szczecin
Pomiary GPS RTK (Real Time Kinematic)
") Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Łącza WAN. Piotr Steć. 28 listopada 2002 roku. P.Stec@issi.uz.zgora.pl. Rodzaje Łącz Linie Telefoniczne DSL Modemy kablowe Łącza Satelitarne
 Łącza WAN Piotr Steć P.Stec@issi.uz.zgora.pl 28 listopada 2002 roku Strona 1 z 18 1. Nośniki transmisyjne pozwalające łączyć sieci lokalne na większe odległości: Linie telefoniczne Sieci światłowodowe
Łącza WAN Piotr Steć P.Stec@issi.uz.zgora.pl 28 listopada 2002 roku Strona 1 z 18 1. Nośniki transmisyjne pozwalające łączyć sieci lokalne na większe odległości: Linie telefoniczne Sieci światłowodowe
rh-pwm3 Trzykanałowy sterownik PWM niskiego napięcia systemu F&Home RADIO.
 KARTA KATALOGOWA rh-pwm3 Trzykanałowy sterownik PWM niskiego napięcia systemu F&Home RADIO. rh-pwm3 służy do sterowania trzema odbiornikami niskiego napięcia zasilanymi z zewnętrznego zasilacza. Regulacja
KARTA KATALOGOWA rh-pwm3 Trzykanałowy sterownik PWM niskiego napięcia systemu F&Home RADIO. rh-pwm3 służy do sterowania trzema odbiornikami niskiego napięcia zasilanymi z zewnętrznego zasilacza. Regulacja
Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP
 Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
ROZPORZĄDZENIE MINISTRA INFRASTRUKTURY 1) z dnia 30 grudnia 2009 r.
 z dnia 30 grudnia 2009 r.") Dziennik Ustaw Nr 2 585 Poz. 8 6. 57,0 66,0 GHz 40 dbm e.i.r.p. oraz gęstość mocy 13 dbm/mhz e.i.r.p. 25 dbm e.i.r.p. oraz gęstość mocy -2 dbm/mhz e.i.r.p. b) w aneksie nr 6 dodaje się poz. 12 w brzmieniu:
Dziennik Ustaw Nr 2 585 Poz. 8 6. 57,0 66,0 GHz 40 dbm e.i.r.p. oraz gęstość mocy 13 dbm/mhz e.i.r.p. 25 dbm e.i.r.p. oraz gęstość mocy -2 dbm/mhz e.i.r.p. b) w aneksie nr 6 dodaje się poz. 12 w brzmieniu:
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów