EEGS. możliwości poprawy jakości systemu EGNOS. EGNOS Extension to Eastern Europe. 04 czerwca 2011 Wrocław
|
|
|
- Wacław Pietrzyk
- 5 lat temu
- Przeglądów:
Transkrypt


1 EEGS możliwości poprawy jakości systemu EGNOS 04 czerwca 011 Wrocław R.Zdunek, J. Zielioski, M.Krywanis-Brzostowska
2 PLAN O projekcie Testy Statyczne Kinematyczne Metody poprawy jakości systemu EGNOS Kontynuacja projektu (EEGS-) EEGS IRKP Meeting 4/06/010 Page
3 O PROJEKCIE


4 Projekt EEGS CEL: Poprawa zasięgu systemu EGNOS Metody: 1. Poprawa algorytmów jonosferycznych. Wpółdziałanie systemu EGNOS i SDCM 3. Rozbudowa sieci stacji RIMS 4. Zastosowanie EDAS do PPP EEGS IRKP Meeting 4/06/010 Page 4
5 TESTY
 Czas trwania: 0 godzin CBKE")
 from a regional network of")

6 Testy statyczne Czas realizacji pomiarów: 16 listopada 010 godz. 18:00 (tydzieo GPS: 1610 i sekundy GPS: 37600) Czas trwania: 0 godzin CBKE CBKA (ref) magicsbas is an Augmentation System that collects GPS and GLONASS data (measurements and ephemeris) from a regional network of reference stations, computes satellite orbits and clocks, ionospheric and integrity information, and broadcasts messages to the final user via Internet. 4/06/010 Page 6

7 Testy statyczne PDOP PDOP Q XX Q YY Q ZZ Q tt GDOP Q XX Q YY Q ZZ GDOP



8 Wiarygodnośd systemu Rozwiązana pozycja Poziom bezpieczeostwa Poziom Alarmu - Użytkownik potrzebuje informacji o różnicy między rozwiązaną, a prawdziwą pozycją, wyznaczony błąd powinien być mniejszy niż poziom alarmu. PRAWDZIWA POZYCJA NIEZNANA - Odbiornik w trybie ciągłym wyznacza przewidywany błąd pozycji, tzw. protection level. - Odbiorniki EGNOS wyznaczają PL na bazie UDRE, GIVE, geometrii satelitów i prawdopodobieństwie nie wykrycia wiarygodności.
9 Wiarygodnośd systemu Ocena wiarygodności bazuje na HAL i VAL. Dla każdej obliczanej pozycji wyznaczany jest XPL, który następnie porównywany jest z XAL. Limit Alarmu > Poziom bezpieczeostwa Limit Alarmu > Poziom bezpieczeostwa Brak alarmu OK dla lądowania Jeżeli Limit alarmu > Poziom bezpieczeostwa alarm wiarygodności jest uruchamiany Alarm! Stop dla lądowania



10 Testy Statyczne Horizontal Vertical - Dane z GEO Protection Level: - UDRE- User Differential Range Error - UIRE User Ionospheric Range Error - Geometria satelitów - Prawdopodobieostwo nie wykrycia braku wiarygodności
11 Testy statyczne Wiarygodnośd systemu - HPE i HPL dla odbiornika Septentrio Pola Rx dla poprawek GEO - HPE i HPL dla OBU I-10 dla poprawek MagicSBAS z zaimplementowanym algorytmem jonosfery (stacje IGS) Wniosek - nawet implementacja nowych algorytmów jonosferycznych nie jest w stanie zagwarantowad ciągłości poprawnego działania systemu EGNOS
12 Testy statyczne Wiarygodnośd systemu - VPE i VPL dla odbiornika Septentrio Pola Rx dla poprawek GEO - VPE i VPL dla OBU I-10 dla poprawek MagicSBAS z zaimplementowanym algorytmem jonosfery (stacje IGS) Wniosek - nawet implementacja nowych algorytmów jonosferycznych nie jest w stanie zagwarantowad ciągłości poprawnego działania systemu EGNOS

13 Testy Kinematyczne Czas pomiarów: 18 listopada 010 od godziny 09:00 do 0:0 Sprzęt wykorzystany do pomiarów: zestaw I-10 OBU z modułem ublox LEA- 4P, pracujący w trybie poprawek magicsbas; dwa zestawy Septentrio PolaRx, (w trybie poprawek GEO oraz w trybie poprawek magicsbas; zestaw Trimble 5700 jako zestaw referencyjny z odrębną anteną Zephir Geodetic, umieszczoną na znanym ekscentrze względem anteny Septentrio L1/L; jeden 4-portowy aktywny splitter antenowy;
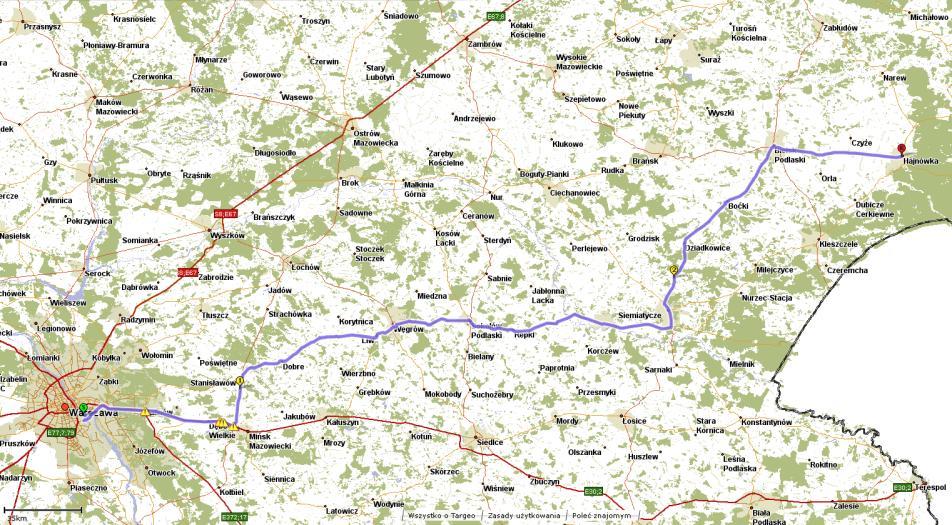







14 Testy Kinematyczne Trasa przejazdu tam (góra) i powrót (dół) Długośd trasy: 454 km, czas przejazdu ok. 10 godzin




15 Testy Kinematyczne Trasa referencyjna wyznaczona z opracowao kinematycznych obserwacji z odbiornika Trimble 5700 oraz Septentrio PolaRx

16 Testy Kinematyczne PDOP GDOP
17 Testy Kinematyczne Rozwiązania z poprawkami SBAS [%] Rx_mS Rx_S I10_mS :00-09:00 09:00-10:00 10:00-11:00 11:00-1:00 1:00-13:00 13:00-14:00 14:00-15:00 15:00-16:00 16:00-17:00 17:00-18:00 18:00-19:00 19:00-0:00 0:00-1:00 cały zakres - dostępnośd poprawek bezpośrednio z satelitów SBAS (GEO) jest znacząco niższa w porównaniu do poprawek uzyskiwanych poprzez Internet (SISNeT przez modem GPRS); liczba satelitów w rozwiązaniach 08:00-09:00 09:00-10:00 10:00-11:00 w spółczynniki PDOP 11:00-1:00 1:00-13:00 13:00-14:00 14:00-15:00 15:00-16:00 16:00-17:00 17:00-18:00 Rx_mS Rx_S I10_mS I10_G 18:00-19:00 19:00-0:00 0:00-1:00 cały zakres Rx_mS Rx_S I10_mS I10_G - rozwiązania tylko z GPS, co oczywiste, oparte są na większej liczbie satelitów i mają niższe współczynniki DOP. Rozwiązania autonomiczne GPS pobrane zostały z plików binarnych odbiornika I10, bazującego na chipsecie u-blox-4,5 1,5 1 0,5 0 08:00-09:00 09:00-10:00 10:00-11:00 11:00-1:00 1:00-13:00 13:00-14:00 14:00-15:00 15:00-16:00 16:00-17:00 17:00-18:00 18:00-19:00 19:00-0:00 0:00-1:00 cały zakres
18 Testy Kinematyczne PolaRx - magicsbas - typy rozwiązań w [%] Rx_mS_SBAS Rx_mS_GPS Rx_mS_NoRes :00-09:00 09:00-10:00 10:00-11:00 11:00-1:00 1:00-13:00 PolaRx SBAS - typy rozwiązań w [%] 13:00-14:00 14:00-15:00 15:00-16:00 16:00-17:00 17:00-18:00 18:00-19:00 19:00-0:00 0:00-1:00 cały zakres Rx_S_SBAS Rx_S_GPS Rx_S_NoRes - dostępnośd poprawek bezpośrednio z satelitów SBAS (GEO) jest znacząco niższa w porównaniu do poprawek uzyskiwanych poprzez Internet (SISNeT przez modem GPRS); :00-09:00 09:00-10:00 10:00-11:00 11:00-1:00 1:00-13:00 I10 magicsbas - typy rozwiązań w [%] 13:00-14:00 14:00-15:00 15:00-16:00 16:00-17:00 17:00-18:00 18:00-19:00 19:00-0:00 0:00-1:00 cały zakres I10_mS_SBAS I10_mS_GPS I10_mS_NoRes - niski procentowy udział rozwiązao z poprawkami EGNOS wynika w dużej mierze z licznych przeszkód terenowych wzdłuż szlaków komunikacyjnych (głównie przydrożne drzewa i tereny leśne, wiadukty itp). Niestety, na wschodnich terenach Polski obecnie praktycznie nie ma dostatecznie długich odcinków dróg bez w/w przeszkód; :00-09:00 09:00-10:00 10:00-11:00 11:00-1:00 1:00-13:00 13:00-14:00 14:00-15:00 15:00-16:00 16:00-17:00 17:00-18:00 18:00-19:00 19:00-0:00 0:00-1:00 cały zakres
19 METODY POPRAWY JAKOŚCI SYSTEMU EGNOS

 SISA SISMA")

")
 i SISA")
 POZYCJA UŻYTKOWNIKA Algorytm")
 Galileo+EGNOS")
20 Multisystem: EGNOS GPS + Galileo (RAIM- Receiver Autonomous Integrity Monitoring) SISA SISMA (Galileo) б UDRE UDRE (GPS) PSEUDOODLEGŁOŚCI POZYCJE SATELITÓW i UDRE, i UIVE, i m45 trv 1 SNR, i Re cos Ei ( tgei ) ( senei R e h i ) WYZNACZENIE POZYCJI (Galileo+EGNOS) i SISA i UIVE, i m45 trv 1 SNR, i Re cos Ei ( tgei ) ( senei R e h I ) POZYCJA UŻYTKOWNIKA Algorytm Ryzyka (Integrity Risk Algorithm) Galileo+EGNOS Algorytm RAIM IR alarm RAIM alarm
 C I Ą G Ł O Ś")
21 Postawienie stacji RIMS na Ukrainie EGNOS EEGS: ALGORYTMY+LGRS D O S T Ę P N O Ś Ć PEŁNE POKRYCIE EUROPY WSCHODNIEJ (NOMINALNE WARUNKI) C I Ą G Ł O Ś Ć
 Plan modernizacji systemu GLONASS Pełna konstelacja")


22 SDCM (System of Differential Correction and Monitoring) Operacyjne 1 SV Nieoperacyjne 5 SV Planowane satelity GEO (lata ) Plan modernizacji systemu GLONASS Pełna konstelacja już w 011 Modernizacja segmentu kontroli Nowe satelity GLONASS-K IOV w 011 GLONASS będzie wykorzystywał FDMA Dodatkowo nowe sygnały CDMA wykorzystane po wystrzeleniu GLONASS-K Rozbudowa systemu do roku 00 Istniejące stacje SDCM: - 14 w Rosji - na Antarktydzie Planowane stacje: - 8 w Rosji - 5 stacji poza Rosją Satelita śledzony przez następującą liczbę stacji:
 EGNOS RIMS + LGRS + KHAR (Kislovodsk) + SVRS")
23 Włączenie stacji LGRS i SDCM do sieci EGNOS EGNOS RIMS + LGRS (Kharkov) EGNOS RIMS + LGRS + KHAR (Kislovodsk) + SVRS (Svetloe)
24 Włączenie stacji LGRS i SDCM do sieci EGNOS EEGS+LGRS EEGS+SDCM D O S T Ę P N O Ś Ć C I Ą G Ł O Ś Ć


25 Nowe algorytmy jonosferyczne EGNOS EEGS POPRAWIONE ALGORYTMY D O S T Ę P N O Ś Ć C I Ą G Ł O Ś Ć
 dla budowanych procedur monitoring sygnału EGNOS Zespół: Centrum Badao Kosmicznych PAN, Polska Agencja Żeglugi Powietrznej, Wyższa Szkoła Oficerska Sił Powietrznych,")
26 Kontynuacja projektu, czyli EEGS- Cel: przygotowanie procedur APV/SBAS dla wybranych lotnisk na terytorium Polski definicja przypadków bezpieczeostwa (ang. safety cases) dla budowanych procedur monitoring sygnału EGNOS Zespół: Centrum Badao Kosmicznych PAN, Polska Agencja Żeglugi Powietrznej, Wyższa Szkoła Oficerska Sił Powietrznych, Uniwersytet Warmiosko-Mazurski w Olsztynie


27 Thank you
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Patronat nad projektem objęły: ESA (Europejska Agencja Kosmiczna), Komisja Europejska (KE),
, Komisja Europejska (KE),") Początki Dynamiczny rozwój systemów nawigacji satelitarnej i ich wykorzystania w bardzo wielu dziedzinach życia codziennego, przyczynił się do faktu, że także w Europie zaczęto myśleć nad stworzeniem własnego
Początki Dynamiczny rozwój systemów nawigacji satelitarnej i ich wykorzystania w bardzo wielu dziedzinach życia codziennego, przyczynił się do faktu, że także w Europie zaczęto myśleć nad stworzeniem własnego
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny

Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek
 Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek Chełm, 15.02.2005 Zakres prezentacji Wymagania ICAO dla systemów GNSS Wymagania ICAO dla poszczególnych
Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek Chełm, 15.02.2005 Zakres prezentacji Wymagania ICAO dla systemów GNSS Wymagania ICAO dla poszczególnych
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Rozkład poprawek EGNOS w czasie
 KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
Stacja referencyjna GNSS EGNOS w procesie wdrażania procedur lądowania z wykorzystaniem technologii satelitarnej
 CIEĆKO Adam 1,2 GRUNWALD Grzegorz 1 KAŹMIERCZAK Rafał 1 TANAJEWSKI Dariusz 1 BAKUŁA Mieczysław 1,2 OSZCZAK Stanisław 2 ZAZULA Michał 3 Stacja referencyjna GNSS EGNOS w procesie wdrażania procedur lądowania
CIEĆKO Adam 1,2 GRUNWALD Grzegorz 1 KAŹMIERCZAK Rafał 1 TANAJEWSKI Dariusz 1 BAKUŁA Mieczysław 1,2 OSZCZAK Stanisław 2 ZAZULA Michał 3 Stacja referencyjna GNSS EGNOS w procesie wdrażania procedur lądowania
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
SATELITARNE TECHNIKI POMIAROWE
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 2 SYSTEMY WSPOMAGANIA SATELITARNEGO I NAZIEMNEGO IAG GGOS PORTAL, INTERNATIONAL SERVICE GNSS (IGS) ALTERNATYWNE DO GNSS METODY OBSERWACJI SATELITARNYCH 1 SYSTEMY SBAS
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 2 SYSTEMY WSPOMAGANIA SATELITARNEGO I NAZIEMNEGO IAG GGOS PORTAL, INTERNATIONAL SERVICE GNSS (IGS) ALTERNATYWNE DO GNSS METODY OBSERWACJI SATELITARNYCH 1 SYSTEMY SBAS

Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Ż Ą Ź ć Ę Ź ć
 Ą Ż Ą Ź ć Ę Ź ć ć Ż Ę Ę ć Ś ć Ż Ż Ź ć Ą ć Ę Ź ć Ś Ś Ę ć Ę ć Ź Ś ć ć ć Ż Ż Ę Ź Ę Ż Ź Ść Ś Ż Ś Ę Ź Ż Ś Ć Ą Ź Ę Ź ć Ż Ć Ę Ź Ż ź Ę Ź Ż Ę Ś Ź Ż Ż Ś Ś Ź Ź Ź Ź Ś Ę Ą Ę Ć Ś Ę Ź Ś Ś Ś Ź Ś Ę Ę Ź Ś Ź Ę Ź Ż Ę Ę ź
Ą Ż Ą Ź ć Ę Ź ć ć Ż Ę Ę ć Ś ć Ż Ż Ź ć Ą ć Ę Ź ć Ś Ś Ę ć Ę ć Ź Ś ć ć ć Ż Ż Ę Ź Ę Ż Ź Ść Ś Ż Ś Ę Ź Ż Ś Ć Ą Ź Ę Ź ć Ż Ć Ę Ź Ż ź Ę Ź Ż Ę Ś Ź Ż Ż Ś Ś Ź Ź Ź Ź Ś Ę Ą Ę Ć Ś Ę Ź Ś Ś Ś Ź Ś Ę Ę Ź Ś Ź Ę Ź Ż Ę Ę ź




Ą ŚĆ Ś Ś Ę ć
 Ą Ę Ą Ą ŚĆ Ś Ś Ę ć ć ć ć ź ć ć ć ć ć ć ć ć Ą ć ć ć Ą Ś ć Ś ć ć Ą ć Ś Ś Ą Ś Ą ć ć Ą ź ź ć ć Ą ć ź ć Ą ć Ą ć ć ć ć ć ć ć ć ć ć ć ć ć ź ć ć Ś ć ć ć Ę Ą ć Ą ć ć ć ć ć ć Ł ź ź ź Ł Ł ć Ą ć ć ć ć ć Ą ć Ą ć Ą
Ą Ę Ą Ą ŚĆ Ś Ś Ę ć ć ć ć ź ć ć ć ć ć ć ć ć Ą ć ć ć Ą Ś ć Ś ć ć Ą ć Ś Ś Ą Ś Ą ć ć Ą ź ź ć ć Ą ć ź ć Ą ć Ą ć ć ć ć ć ć ć ć ć ć ć ć ć ź ć ć Ś ć ć ć Ę Ą ć Ą ć ć ć ć ć ć Ł ź ź ź Ł Ł ć Ą ć ć ć ć ć Ą ć Ą ć Ą
ś ść ść ś ść ść ś ś ś ś ść ś ś ś ść ść
 Ą Ł Ł Ł Ę Ł ś ś ś ś ść ść ść ść Ś ść ŚĆ ś ŚĆ ś ś ść ść ś ść ść ś ś ś ś ść ś ś ś ść ść ś ś ś Ż ś Ś ś Ś ść ś ś ś ś ś ś ś ś Ś ś ś ś ś Ł Ś ś ś ś Ś ś ś ź Ś ŚĆ ś ś ś ś ś ś Ś ś Ś ś ś ś ś ś ś ś Ś Ś ść ś ś ś ś
Ą Ł Ł Ł Ę Ł ś ś ś ś ść ść ść ść Ś ść ŚĆ ś ŚĆ ś ś ść ść ś ść ść ś ś ś ś ść ś ś ś ść ść ś ś ś Ż ś Ś ś Ś ść ś ś ś ś ś ś ś ś Ś ś ś ś ś Ł Ś ś ś ś Ś ś ś ź Ś ŚĆ ś ś ś ś ś ś Ś ś Ś ś ś ś ś ś ś ś Ś Ś ść ś ś ś ś





Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu

ź Ź Ź ć ć ć ź ć ć ć ć ć Ź
 ź Ź Ź ć ć ć ź ć ć ć ć ć Ź ć ć ć ć ć ć ć ć Ż ć ć ć ć ć ć ć ć ć ć ć Ż Ż ć ć ć ć ć ć ć ć Ż ć ć ć ź ć Ź ć ć ć ć ć ć ć ć ć ź ć ć ć ć ć ć ć ć ć ć ć ć ć ć Ż ć ć ć ć Ż ć ć ć ć ć ć ć ć Ż ć Ł Ś Ś ć Ą Ę ć Ę ć Ż ć
ź Ź Ź ć ć ć ź ć ć ć ć ć Ź ć ć ć ć ć ć ć ć Ż ć ć ć ć ć ć ć ć ć ć ć Ż Ż ć ć ć ć ć ć ć ć Ż ć ć ć ź ć Ź ć ć ć ć ć ć ć ć ć ź ć ć ć ć ć ć ć ć ć ć ć ć ć ć Ż ć ć ć ć Ż ć ć ć ć ć ć ć ć Ż ć Ł Ś Ś ć Ą Ę ć Ę ć Ż ć
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania



4π 2 M = E e sin E G neu = sin z. i cos A i sin z i sin A i cos z i 1
 1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
Laboratorium z Miernictwa Górniczego
 Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy

Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS)
") Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Ć ą ć ą ą ć ś ń ć śćś ń ć ć ść ż ą ś ż ż ą ń ż ż ą ś Ę ą ą ś ą ż ą ż ą ś ć ą ż ś ś ś ż ż ń ż Ć ś ż ą ś ś ś ć ś ą ą ś ą ś ś ą ż ż
 Ł ż ń Ś ą ą Ę ń Ł ą ą ą ą Ń ą ą ą ą ś ą ż ą ż ąć Ś ą ś ą ś ą ą ż ń ż Ś Ę ń ą żź ż ż Ć ą ć ą ą ć ś ń ć śćś ń ć ć ść ż ą ś ż ż ą ń ż ż ą ś Ę ą ą ś ą ż ą ż ą ś ć ą ż ś ś ś ż ż ń ż Ć ś ż ą ś ś ś ć ś ą ą ś
Ł ż ń Ś ą ą Ę ń Ł ą ą ą ą Ń ą ą ą ą ś ą ż ą ż ąć Ś ą ś ą ś ą ą ż ń ż Ś Ę ń ą żź ż ż Ć ą ć ą ą ć ś ń ć śćś ń ć ć ść ż ą ś ż ż ą ń ż ż ą ś Ę ą ą ś ą ż ą ż ą ś ć ą ż ś ś ś ż ż ń ż Ć ś ż ą ś ś ś ć ś ą ą ś
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
ć Ę Ż ć ć ć Ż Ź
 Ł ć ć Ź Ź Ą ź Ż ć Ę Ż ć ć ć Ż Ź Ź Ź Ż Ż Ń ć ć Ń Ż Ź Ż Ź Ż ć Ó Ń Ż ć Ż ć Ę ć ć Ę Ż Ź Ż Ź Ź ć Ż Ź Ź Ź Ż ć Ź Ź Ź Ź Ź Ż Ż Ę Ż ć Ę Ę Ź ć Ż Ż ĘĄ Ź Ź ć Ż Ź Ą Ż Ść Ż Ę Ź Ż Ż Ż Ź Ż Ż ć ć ć ŻŻ ć ć ć ć Ę Ż ć ć Ż
Ł ć ć Ź Ź Ą ź Ż ć Ę Ż ć ć ć Ż Ź Ź Ź Ż Ż Ń ć ć Ń Ż Ź Ż Ź Ż ć Ó Ń Ż ć Ż ć Ę ć ć Ę Ż Ź Ż Ź Ź ć Ż Ź Ź Ź Ż ć Ź Ź Ź Ź Ź Ż Ż Ę Ż ć Ę Ę Ź ć Ż Ż ĘĄ Ź Ź ć Ż Ź Ą Ż Ść Ż Ę Ź Ż Ż Ż Ź Ż Ż ć ć ć ŻŻ ć ć ć ć Ę Ż ć ć Ż

Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
Zastosowanie wysokoczęstotliwościowych odbiorników GNSS do badania scyntylacji sygnałów satelitarnych w jonosferze.
 Zastosowanie wysokoczęstotliwościowych odbiorników GNSS do badania scyntylacji sygnałów satelitarnych w jonosferze. R. Sieradzki, A. Krankowski, Krypiak-Gregorczyk A., Zakharenkova I., Kapcia J. Uniwersytet
Zastosowanie wysokoczęstotliwościowych odbiorników GNSS do badania scyntylacji sygnałów satelitarnych w jonosferze. R. Sieradzki, A. Krankowski, Krypiak-Gregorczyk A., Zakharenkova I., Kapcia J. Uniwersytet
ć Ą Ą Ł Ą
 ź ź ź ć ć Ą Ą Ł Ą ź ź Ę Ą ź Ą ć Ł Ł Ą Ś Ę ź ź Ą Ą ź ć ć Ł Ę ć ź ć ć Ą Ć ź ź ź ć ć ć ć ć ź ź ć ć ź ć Ś Ę ć ć ć ć Ł ź ź ź ź ć Ę Ż ć ć ć ć Ę Ę ć Ę Ę ć ć Ę ć ć Ł ć Ć ć Ł Ł Ę Ę ć Ę ć ź ć Ń Ł Ł Ł Ś ć ć ć Ę Ś
ź ź ź ć ć Ą Ą Ł Ą ź ź Ę Ą ź Ą ć Ł Ł Ą Ś Ę ź ź Ą Ą ź ć ć Ł Ę ć ź ć ć Ą Ć ź ź ź ć ć ć ć ć ź ź ć ć ź ć Ś Ę ć ć ć ć Ł ź ź ź ź ć Ę Ż ć ć ć ć Ę Ę ć Ę Ę ć ć Ę ć ć Ł ć Ć ć Ł Ł Ę Ę ć Ę ć ź ć Ń Ł Ł Ł Ś ć ć ć Ę Ś


Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Ś Ę Ą Ł Ś Ł Ł Ł Ł Ł Ś Ś Ł Ł Ł Ą Ł Ł Ł Ł Ł Ą Ą Ł
 ę Ą Ł Ł Ś Ę Ą Ł Ś Ł Ł Ł Ł Ł Ś Ś Ł Ł Ł Ą Ł Ł Ł Ł Ł Ą Ą Ł Ł ś ś ś ś ę ś ę ę ś ść ść ść ę ę ę ść ę ś Ą Ą ś Ż ść Ź Ś Ą ę ść ść ść Ą ś Ż ę Ż Ń Ą Ł ś ę ś ę ś ś ę ś ś ść Ę Ś ś Ś ś Ś ś Ś ź ę ź ę ść ś ę Ę ś Ł ść
ę Ą Ł Ł Ś Ę Ą Ł Ś Ł Ł Ł Ł Ł Ś Ś Ł Ł Ł Ą Ł Ł Ł Ł Ł Ą Ą Ł Ł ś ś ś ś ę ś ę ę ś ść ść ść ę ę ę ść ę ś Ą Ą ś Ż ść Ź Ś Ą ę ść ść ść Ą ś Ż ę Ż Ń Ą Ł ś ę ś ę ś ś ę ś ś ść Ę Ś ś Ś ś Ś ś Ś ź ę ź ę ść ś ę Ę ś Ł ść
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista
 Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
ć ż ż ć Ą ż ż Ł ć Ż ż Ż Ż Ż Ż
 Ł Ę Ł ż Ż ć ż ż ć ż ż ć Ą ż ż Ł ć Ż ż Ż Ż Ż Ż ż ż Ł ż Ż Ł Ż Ż Ż Ż ż ż Ż Ż Ż ć ć ż ć ż ż ŻĄ ć ć ż Ż Ż ż Ż Ż ć Ż ź ć ż Ę Ż Ę Ż ć Ż Ż ć Ż ć ż Ż Ż ż Ż Ą Ż ć ż ć Ś Ą ż Ż Ż Ż ż Ż Ż Ż Ż Ż Ż Ż Ż ż ż Ż ż ż Ż Ż
Ł Ę Ł ż Ż ć ż ż ć ż ż ć Ą ż ż Ł ć Ż ż Ż Ż Ż Ż ż ż Ł ż Ż Ł Ż Ż Ż Ż ż ż Ż Ż Ż ć ć ż ć ż ż ŻĄ ć ć ż Ż Ż ż Ż Ż ć Ż ź ć ż Ę Ż Ę Ż ć Ż Ż ć Ż ć ż Ż Ż ż Ż Ą Ż ć ż ć Ś Ą ż Ż Ż Ż ż Ż Ż Ż Ż Ż Ż Ż Ż ż ż Ż ż ż Ż Ż
ż ć
 Ł Ł ż ć ć ż ć Ą Ł ó ó ć ż ć ć ż ć Ę ć Ę ć ć Ę ć ć ć Ę ż ć ć ć Ś ć Ę Ę ż ż ć ż Ę ć ć Ę ż ż Ę Ł ć ć Ą Ę Ł ć ć ć ż ć Ę Ł Ść Ą Ę Ł ć ć ć ć Ę Ł Ść Ą Ę Ł ć ć ć Ł ć Ę Ę ć ć ć ć Ł Ść ć ć Ę Ę Ł Ś Ą Ś Ś Ł Ą Ą ż
Ł Ł ż ć ć ż ć Ą Ł ó ó ć ż ć ć ż ć Ę ć Ę ć ć Ę ć ć ć Ę ż ć ć ć Ś ć Ę Ę ż ż ć ż Ę ć ć Ę ż ż Ę Ł ć ć Ą Ę Ł ć ć ć ż ć Ę Ł Ść Ą Ę Ł ć ć ć ć Ę Ł Ść Ą Ę Ł ć ć ć Ł ć Ę Ę ć ć ć ć Ł Ść ć ć Ę Ę Ł Ś Ą Ś Ś Ł Ą Ą ż
POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
Ę Ż Ż Ż ś ż Ż
 Ż ż ż ś ś ż ż ż ś ż Ż Ź ś Ź Ź ś ś ż ż ś ś ś ś Ż ś Ż Ę Ż Ż Ż ś ż Ż ś ś ś Ż Ą ż ś ś ź Ż ż ż ś ś ż Ł Ż ź ż ż ś ś Ę ż ż ż ż Ę ś ż ć ś Ę ż ś ż ś Ż ż ś ż ś ść ść Ę ż ż ż ś ż Ą Ż Ś ś Ą Ż ż ż ś Ę ś Ż ś Ń ś ż Ą
Ż ż ż ś ś ż ż ż ś ż Ż Ź ś Ź Ź ś ś ż ż ś ś ś ś Ż ś Ż Ę Ż Ż Ż ś ż Ż ś ś ś Ż Ą ż ś ś ź Ż ż ż ś ś ż Ł Ż ź ż ż ś ś Ę ż ż ż ż Ę ś ż ć ś Ę ż ś ż ś Ż ż ś ż ś ść ść Ę ż ż ż ś ż Ą Ż Ś ś Ą Ż ż ż ś Ę ś Ż ś Ń ś ż Ą








Narzędzia wspierające system EGNOS Paweł Seliga
 Narzędzia wspierające system EGNOS Paweł Seliga 17 luty 2015 2 EGNOS Miasto, dnia 3 EGNOS - European Geostationary Navigation Overlay System Europejski system satelitarny wspomagający działanie systemów
Narzędzia wspierające system EGNOS Paweł Seliga 17 luty 2015 2 EGNOS Miasto, dnia 3 EGNOS - European Geostationary Navigation Overlay System Europejski system satelitarny wspomagający działanie systemów


ć ć Ł ć Ź ć Ł ź ć Ś ć ć Ż Ł Ż ć ż ć
 Ł Ź Ł Ł ź ź Ż Ż ż Ż ć Ś ż ć ć Ę ć ć Ł ć Ź ć Ł ź ć Ś ć ć Ż Ł Ż ć ż ć Ł ć ć ć ć Ł Ż ć Ł ź ć Ś Ż Ż Ż ż Ż Ż ż Ż Ś Ż Ą Ł Ż ź Ż Ż Ż Ż Ż Ż Ś Ż Ż ż Ż Ż ż ż Ł Ż Ś Ż Ż Ż Ż Ż Ż Ś Ż Ę Ł Ź Ó ż Ę Ł ź Ł Ź Ż ż Ł Ż Ż ż
Ł Ź Ł Ł ź ź Ż Ż ż Ż ć Ś ż ć ć Ę ć ć Ł ć Ź ć Ł ź ć Ś ć ć Ż Ł Ż ć ż ć Ł ć ć ć ć Ł Ż ć Ł ź ć Ś Ż Ż Ż ż Ż Ż ż Ż Ś Ż Ą Ł Ż ź Ż Ż Ż Ż Ż Ż Ś Ż Ż ż Ż Ż ż ż Ł Ż Ś Ż Ż Ż Ż Ż Ż Ś Ż Ę Ł Ź Ó ż Ę Ł ź Ł Ź Ż ż Ł Ż Ż ż

C e l e m c z ę ś c i d y s k u s y j n e j j e s t u ś w i a d o m i e n i e s o b i e, w o p a r c i u o r o z w a ż a n i a P i s m a Ś w.
 1. C e l s p o t k a n i a. C e l e m c z ę ś c i d y s k u s y j n e j j e s t u ś w i a d o m i e n i e s o b i e, w o p a r c i u o r o z w a ż a n i a P i s m a Ś w., ż e : B y d z b a w i o n y m
1. C e l s p o t k a n i a. C e l e m c z ę ś c i d y s k u s y j n e j j e s t u ś w i a d o m i e n i e s o b i e, w o p a r c i u o r o z w a ż a n i a P i s m a Ś w., ż e : B y d z b a w i o n y m



ć Ś Ś Ść
 ć Ś Ś Ść Ś Ł Ź Ść ć ć ć Ść ć Ść Ś Ść ć ć Ś Ó Ś Ś ć ć Ś Ś Ó Ś Ś ć Ą ć Ś Ś Ł ć Ś Ś Ł ć Ą Ść ć Ś Ó Ź ć ć Ś Ś ć ć ć Ś Ść Ść Ś Ś Ś Ś Ś Ś Ś Ś Ś Ś ć Ą Ś Ą Ś Ś Ź Ź ć ć Ś Ę Ź Ł ź Ę Ę Ś Ś Ś Ę Ą Ź ć Ł Ś Ś Ś Ś ć Ś
ć Ś Ś Ść Ś Ł Ź Ść ć ć ć Ść ć Ść Ś Ść ć ć Ś Ó Ś Ś ć ć Ś Ś Ó Ś Ś ć Ą ć Ś Ś Ł ć Ś Ś Ł ć Ą Ść ć Ś Ó Ź ć ć Ś Ś ć ć ć Ś Ść Ść Ś Ś Ś Ś Ś Ś Ś Ś Ś Ś ć Ą Ś Ą Ś Ś Ź Ź ć ć Ś Ę Ź Ł ź Ę Ę Ś Ś Ś Ę Ą Ź ć Ł Ś Ś Ś Ś ć Ś

 ż Ę Ł Ą ż ż ż ź Ł ć Ł ż ć ć Ść ć ź ż ż Ź ć ć ć ć ć ć ć ż ż Ś Ś ż Ś ć ż ć ć Ł Ść ż Ś ż Ś ż ć ż ć ć ć ż ć ż ć ż ż ż ż ć ż ż Ł ć ż ć Ł ż Ź Ę ż ż Ś ć ż ż ć Ź Ś ż Ą ż ć Ś ć ć ż ć ć Ś ż Ź Ł ć ć ć Ć ć ć Ś ć ż
ż Ę Ł Ą ż ż ż ź Ł ć Ł ż ć ć Ść ć ź ż ż Ź ć ć ć ć ć ć ć ż ż Ś Ś ż Ś ć ż ć ć Ł Ść ż Ś ż Ś ż ć ż ć ć ć ż ć ż ć ż ż ż ż ć ż ż Ł ć ż ć Ł ż Ź Ę ż ż Ś ć ż ż ć Ź Ś ż Ą ż ć Ś ć ć ż ć ć Ś ż Ź Ł ć ć ć Ć ć ć Ś ć ż


ć
 Ł Ę Ę Ą ć Ś ć ć ź ź ć ć ź ź ź ć ć ź Ś ć ć ć ć ć Ś ć Ż ć ŚĆ Ć Ż Ś Ż Ś Ż ć Ś Ś Ś Ś Ś Ś Ś Ś Ś Ś Ś ć Ć ć Ć ć Ć ć Ś Ś Ś ć Ć Ż Ć ć ć Ś Ż Ż Ś Ć Ż ć ć ć ć ć Ś Ś Ś ć Ż Ż ć ć Ś Ś ć Ś Ż ć Ś ć ć ć Ż Ć ć ć Ż Ś Ż Ć
Ł Ę Ę Ą ć Ś ć ć ź ź ć ć ź ź ź ć ć ź Ś ć ć ć ć ć Ś ć Ż ć ŚĆ Ć Ż Ś Ż Ś Ż ć Ś Ś Ś Ś Ś Ś Ś Ś Ś Ś Ś ć Ć ć Ć ć Ć ć Ś Ś Ś ć Ć Ż Ć ć ć Ś Ż Ż Ś Ć Ż ć ć ć ć ć Ś Ś Ś ć Ż Ż ć ć Ś Ś ć Ś Ż ć Ś ć ć ć Ż Ć ć ć Ż Ś Ż Ć





ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
Ć ć ć Ś ć
 ź Ę Ę Ę ź ć ć ć Ć ć ć Ś ć ź ć ć ć Ć Ś ź Ś Ć ć Ż ź ć Ż Ś Ł ŚĆ ć ć ć Ć ć Ść ć Ż ć ć ć ć ć ć ć ć Ą ć ć Ś ć Ś ć Ż Ś ć Ó ć Ś ć Ś ć ć ć ć Ś ć ć Ś ć Ć Ż ć Ć ć ć ć ć Ę ć ź ć ć ć ć ć ź ć ć ć Ć ź ć Ż ć ć ć Ś ć Ć
ź Ę Ę Ę ź ć ć ć Ć ć ć Ś ć ź ć ć ć Ć Ś ź Ś Ć ć Ż ź ć Ż Ś Ł ŚĆ ć ć ć Ć ć Ść ć Ż ć ć ć ć ć ć ć ć Ą ć ć Ś ć Ś ć Ż Ś ć Ó ć Ś ć Ś ć ć ć ć Ś ć ć Ś ć Ć Ż ć Ć ć ć ć ć Ę ć ź ć ć ć ć ć ź ć ć ć Ć ź ć Ż ć ć ć Ś ć Ć
Ę Ę ź Ę Ą ć ć Ę Ą ć Ą Ę ć Ę Ę ć
 Ń Ń Ż Ś Ś ź Ą ŻŻ ź ć Ą ć ć ź Ą Ę ź Ę Ę Ę Ę ź Ę Ą ć ć Ę Ą ć Ą Ę ć Ę Ę ć ć ć ć ć Ź Ź ć Ź Ę ć ć ć Ż ć ć ć ć ć ć ć ć ć ź ć Ż Ż ć Ż ć Ż ć Ś Ż ć Ż ć Ż Ź ć Ż ć Ź ź ć ć Ż ć ć Ś Ż Ź Ś ć ć ź ć ć ć Ń ć Ż Ż ć Ę ź
Ń Ń Ż Ś Ś ź Ą ŻŻ ź ć Ą ć ć ź Ą Ę ź Ę Ę Ę Ę ź Ę Ą ć ć Ę Ą ć Ą Ę ć Ę Ę ć ć ć ć ć Ź Ź ć Ź Ę ć ć ć Ż ć ć ć ć ć ć ć ć ć ź ć Ż Ż ć Ż ć Ż ć Ś Ż ć Ż ć Ż Ź ć Ż ć Ź ź ć ć Ż ć ć Ś Ż Ź Ś ć ć ź ć ć ć Ń ć Ż Ż ć Ę ź

ć ć Ą ć Ęć Ó Ą ź ć ć ć ć ź ź Ą ć Ę ć ź ć ć ć ź ć ź ć ć ć Ś Ź ź
 ź Ó ć Ę ć Ó ć ć ć ć Ź ć ź ć ć Ź ć ć ć Ą ć Ęć Ó Ą ź ć ć ć ć ź ź Ą ć Ę ć ź ć ć ć ź ć ź ć ć ć Ś Ź ź ć Ą ć Ą ć ź ć ź ć Ę ć ć Ź ź Ę ć ć ć ć Ę Ę ź ć Ó ć ć ć ć ć ć ć ć ć Ź Ź ć ć ć ź Ę ć ć ć ć Ę Ąć ź Ź ć Ą ć ć
ź Ó ć Ę ć Ó ć ć ć ć Ź ć ź ć ć Ź ć ć ć Ą ć Ęć Ó Ą ź ć ć ć ć ź ź Ą ć Ę ć ź ć ć ć ź ć ź ć ć ć Ś Ź ź ć Ą ć Ą ć ź ć ź ć Ę ć ć Ź ź Ę ć ć ć ć Ę Ę ź ć Ó ć ć ć ć ć ć ć ć ć Ź Ź ć ć ć ź Ę ć ć ć ć Ę Ąć ź Ź ć Ą ć ć

ż ń Ł ń ń ż ż ż ż ż
 Ą ń ż ż ż Ś ż ń Ł ń ń ż ż ż ż ż ż Ś ń Ł ń ż ć ż ż ż ż Ł Ł ż ż ć ż ń Ź ć ż Ę ż ń ć Ź ż Ł ż Ł ż ż ć Ś ż ć ż Ą ż ń ż Ź ż Ź Ą ż ń ż ż ń ć ż ć ć ż ż ż ż ć ż ć Ś ż ń ż ż Ź ż ć ż Ę ż ć ż Ę Ą ń ż Ę Ź ż ć ć ć ć
Ą ń ż ż ż Ś ż ń Ł ń ń ż ż ż ż ż ż Ś ń Ł ń ż ć ż ż ż ż Ł Ł ż ż ć ż ń Ź ć ż Ę ż ń ć Ź ż Ł ż Ł ż ż ć Ś ż ć ż Ą ż ń ż Ź ż Ź Ą ż ń ż ż ń ć ż ć ć ż ż ż ż ć ż ć Ś ż ń ż ż Ź ż ć ż Ę ż ć ż Ę Ą ń ż Ę Ź ż ć ć ć ć