Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych
|
|
|
- Alicja Magda Chrzanowska
- 6 lat temu
- Przeglądów:
Transkrypt


1
2 Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych
 lub też podąża po wyznaczonej trajektorii ruchu (np.")
3 Okólnik IMO MSC 645 Guidelines for Vessels with Dynamic Positioning Systems Statek pozycjonowany dynamicznie (statek DP) oznacza jednostkę lub też statek, który automatycznie utrzymuje swoją pozycję (względną lub bezwzględną) lub też podąża po wyznaczonej trajektorii ruchu (np. utrzymując zadany kurs i/lub prędkość), wykorzystując do tego celu pędniki okrętowe.

4 Poradnik IMCA (International Marine Contractors Association) Guidelines for the Design and Operation of Dynamically Positioned Vessel Dynamiczne pozycjonowanie jest to automatyczna kontrola pozycji statku i jego ustawienia na danym kierunku przy użyciu pędników z uwzględnieniem jednego lub większej liczby pozycyjnych systemów referencyjnych dużej dokładności.
 przy użyciu kombinacji komputerów, pozycyjnych systemów referencyjnych dużej dokładności")
5 Publikacje firmy Kongsberg Dynamiczne pozycjonowanie jest to metoda utrzymania pozycji statku morskiego w ściśle określonym obszarze (przestrzeni) przy użyciu kombinacji komputerów, pozycyjnych systemów referencyjnych dużej dokładności i pędników
6 Historia Rozwój systemów DP nierozerwalnie związany jest z odwiertami u rozwojem przemysłu naftowego w obszarach morskich. Początek XIX wieku Morze Kaspijskie pierwszy odwiert w dnie morskim w odległości ok 30m od brzegu z wykorzystaniem drewnianego mola Kolejne odwierty mające stałe połączenie z lądem w postaci pomostów wiertniczych przekraczających długość 400m 1925 Morze Kaspijskie pierwsze samopodnośne platformy wiertnicze i produkcyjne typu Jack up. Platformy te mogły prowadzić operacje wiertnicze i wydobywcze na akwenach o głębokościach do ok. 60m.

7 Historia Jednostki pływające, stabilizujące swoją pozycję poprzez odpowiedni dobór sił naciągu na linach (łańcuchach) kotwicznych doczepianych do kotwic, które wcześniej odpowiednio rozmieszczano i osadzano. Rozwiązanie to umożliwiało odwierty i eksploatację złóż na głębokościach do ok 600m Kalifornia USA statek CUSS I wykonał odwiert La Jolla utrzymując swą pozycję przy pomocy ręcznego dynamicznego pozycjonowania
8 Historia 1961 USA zwodowanie pierwszego statku wiertniczego z w pełni funkcjonalnym (automatycznym) systemem dynamicznego pozycjonowania Statek EUREKA wybudowany dla koncernu Shell. Odwierty na głębokościach do 1300m (fala do6mwiatrdo21m/s 1963 Francja zwodowanie dwóch statków DP (Salvor i Terebel) przeznaczonych do kładzenia rurociągów na dnie morskim oraz zabezpieczenia prac podwodnych USA zwodowanie statku Caldrill (Caldrill Offshore Company). Odwierty na głębokościach do 2000m.

9 Historia 1971 Wielka Brytania rozpoczęcie produkcji systemów DP przez firmę British GEC Electrical Projects Ltd Wielka Brytania przebudowa statku handlowego Wimpey Sealab na statek wiertniczy do badania przybrzeżnych złóż węgla kamiennego 1977 Wielka Brytania zwodowanie pierwszej półzanurzeniowej platformy wiertniczej Uncle John
10 Historia 1975 Norwegia pierwsze badania nad systemami DP prowadzone na zlecenie firmy Stolt Nielsen przez Kongsberg Vapenfabrikk(KV) 1977 Norwegia zwodowanie (Seaway Eagle) pierwszego stateku z norweskim systemem DP. Systemy norweskie firmy Kongsberg cieszyły się dużym uznaniem, co sprawiło, że firma stała się jednym z największych producentów systemów DP. Według folderu reklamowego z 2012 roku pokrywała ona ponad 75% światowego rynku systemów DP

11 Zastosowanie statków wyposażonych w systemy DP Poszukiwanie, wydobycie i eksploatacja złóż ropy naftowej i gazu oraz innych bogactw naturalnych (statki badawcze, sejsmiczne, hydrograficzne, statki i platformy wiertnicze, statki inicjalizujące i stymulujące odwierty, jednostki produkcyjne, statki wybierające urobek skalny z dna)

12 Zastosowanie statków wyposażonych w systemy DP Budowa nawodnych i podwodnych instalacji wydobywczoeksploatacyjnych (statki układające rurociągi, i instalacje podwodne, jednostki wspomagające operacje budowy instalacji podwodnych dźwigi pływające, transportowe statki dźwigające, pogłębiarki, statki obkładające urobkiem skalnym i/lub zasypujące rurociągi, kable i inne instalacje denne)


13 Zastosowanie statków wyposażonych w systemy DP Odbiór, przetwarzanie, przeładunek i transport produktów ropopochodnych na pełnym morzu (statki przeładunkowomagazynowe, zbiornikowce dowozowe)


14 Zastosowanie statków wyposażonych w systemy DP Konserwacja, naprawa, modyfikacja i eksploatacja instalacji wydobywczo-eksploatacyjnych (statki zabezpieczające prace nurkowe, statki zabezpieczające pracę zdalnie sterowanych robotów podwodnych, wielozadaniowe statki konstrukcyjnokonserwacyjno-naprawcze)

15 Zastosowanie statków wyposażonych w systemy DP Obsługa eksploatacyjna oraz zabezpieczenia logistycznego i nawigacyjnego stałych i ruchomych instalacji pełnomorskich (holowniki, statki serwisowe, statki zaopatrzeniowe, jednostki hotelowe, jednostki ustawiające stałe i ruchome elementy oznakowania nawigacyjnego, statki dozorująco ratownicze, jednostki rozstawiające i zabezpieczające systemy kotwiczenia platform)

16 Zastosowanie statków wyposażonych w systemy DP Zabezpieczenie operacji manewrowych statków pasażerskich, promów oraz innych jednostek rekreacyjnych Zabezpieczenie operacji wojskowych i militarnych Zabezpieczenie innych operacji


17 Zastosowanie statków wyposażonych w systemy DP Terminale przeładunkowe HiLoad DP
18 Zasada działania 6 stopni swobody Ruchy statku w płaszczyźnie poziomej: Oscylacje poprzeczne (sway) powodujące przemieszczania poprzeczne do wzdłużnej osi symetrii statku. Oscylacje wzdłużne (surge) powodujące przemieszczenia statku w kierunku zgodnym ze wzdłużną osią symetrii Myszkowanie (yaw) powodujące obrót statku w płaszczyźnie horyzontalnej względem jego osi pionowej
 powodujące wznoszenie i opadanie statku wzdłuż jego osi pionowej Kołysanie (roll) powodujące obrót statku względem jego osi")
19 Zasada działania Ruchy statku w płaszczyźnie pionowej: Kiwanie (pitch), powodujące obrót statku względem jego osi poprzecznej Nurzanie (heave) powodujące wznoszenie i opadanie statku wzdłuż jego osi pionowej Kołysanie (roll) powodujące obrót statku względem jego osi wzdłużnej
20 Zasada działania Systemy DP opracowane dla jednostek nawodnych wykorzystuje się jedynie do kontroli trzech z sześciu wymienionych kierunków ruchu: Oscylacje poprzeczne systemy pozycyjne Oscylacje wzdłużne systemy pozycyjne Myszkowanie kompasy, systemy referencyjne dużej dokładności
21 Zasada działania Zasada działania systemu DP opiera się na wyliczeniu nastaw sterów i pędników tak, aby różnica pomiędzy wartościami otrzymanymi z pomiarów rzeczywistych, a wartościami zadanymi przez użytkownika mieściła się w dopuszczalnych granicach Aby możliwe było osiągniecie założonego celu w systemach DP zastosowano metody modelowania matematycznego. W skład systemu wchodzą: Model statku Model wiatru Model naporu Model korekcyjny Regulator optymalny
22 Zasada działania Model statku zawiera opis hydrodynamiczny jednostki w funkcji jej zanurzenia, prędkości oraz sił generowanych przez pędniki statku Model wiatru zawiera zbiór współczynników pozwalających na obliczenie siły generowanej przez wiatr w zależności od kąta natarcia wiatru oraz jego prędkości Model naporu zawiera charakterystyki pędników pozwalających na obliczenie siły naporu na podstawie sygnału z wykorzystywanych urządzeń napędowych(sterów i pędników)
23 Zasada działania Model korekcyjny jego zadaniem jest porównanie przewidywanej pozycji i zorientowania (kursu) jednostki ze zmierzoną wartością jej pozycji i zorientowania(kursu) Regulator optymalny jego zadaniem jest obliczenie sił naporu potrzebnych do utrzymania jednostki w zadanej pozycji i/lub na zadanym zorientowaniu(kursie)





24 Zasada działania W tradycyjnych systemach DP do modelu statku dostarczane są dane dotyczące: Siły wiatru Siły naporu pędników okrętowych Siły oporów ruchu
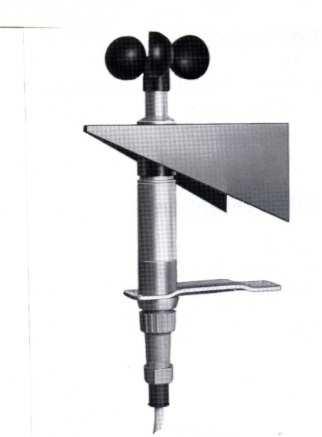
25 Zasada działania Siła wiatru siła oddziaływania wiatru obliczana jest na podstawie na podstawie przyjętego modelu zakłóceń zewnętrznych. System porównuje dane (kierunek i prędkość wiatru) otrzymane bezpośrednio z urządzeń pomiarowych (wiatromierzy) z aktualnym zorientowaniem jednostki (jej kursem, pozycją, zanurzeniem). Model wiatru może być opisany za pomocą równań matematycznych lub np. w postaci tabelarycznej macierzy danych, zawierających specjalnie określone współczynniki ruchu statku wyznaczone w funkcji kierunku natarcia wiatru i jego prędkości względnej.
26 Zasada działania Siła naporu pędników okrętowych siła ta określana jest zwykle na podstawie przyjętego modelu matematycznego pędników statku, który w zależności od zmierzonych (obliczonych) sił zewnętrznych dobiera takie nastawy na sterach i pędnikach, które umożliwiają efektywne zrównoważenie zakłóceń zewnętrznych. Siły naporu pędników określane są zwykle w funkcji przyłożonej mocy oraz kierunku działania siły hydrodynamicznej wytworzonej przez pędniki. Dane te mogą być opisane w postaci równań matematycznych lub w postaci tabelarycznej macierzy danych, tworzonej podczas badań modelowych oraz prób morskich
27 Zasada działania Siła oporów ruchu dane te opisywane są zwykle w postaci tabelarycznej macierzy danych zawierających współczynniki oporów ruchu oszacowane podczas badań modelowych oraz prób morskich statku w funkcji kwadratu jego prędkości, masy statku wraz z ładunkiem i zapasami (zanurzenie, trym) oraz jego kursu i zorientowania względem wiatru, prądu i fali.
28 Zasada działania Na podstawie powyższych danych i przy wykorzystaniu przedstawionych modeli obliczana jest pozycja statku, jego prędkość i kurs. Modele matematyczne nigdy nie oddają wiernie charakterystyki statku rzeczywistego, stąd każdorazowo wymaga się, aby modele te podlegały procesowi ciągłego dostrajania względem aktualnych wartości zakłóceń zewnętrznych. Na pełne dostrojenie systemu dynamicznego pozycjonowania potrzeba zwykle około 30 minut pracy systemu.
29 Zasada działania
30 Budowa okólnikimomsc645 W skład systemu dynamicznego pozycjonowania wchodzą: System zasilania(power system) System napędowy (thruster system) System sterujący DPC(DP control system)
31 Budowa okólnikimomsc645 System zasilania (power system) wszystkie komponenty i systemu potrzebne do zaopatrzenia systemu DP w energię elektryczną. Zawiera on: Podstawowe przekaźniki energii wraz z niezbędnymi podsystemami pomocniczymi Generatory prądotwórcze Tablice rozdzielcze System dystrybucji energii (okablowanie, przełączniki przekaźniki i inne urządzenia pomocnicze)
32 Budowa okólnikimomsc645 System napędowy (thruster system) oznacza wszystkie komponenty i systemy niezbędne do zapewnienia systemowi DP siły napedowej. W jego skład wchodzą: Pędniki z systemem sterującym i niezbędnymi systemami pomocniczymi Główna śruba napędowa i ster(y) jeżeli są one kontrolowane przez system DP Elektronika sterująca pędnikami Układ ręcznego sterowania pędnikami Przełączniki, przekaźniki, okablowanie i inne urządzenia pomocnicze
33 Budowa okólnikimomsc645 System sterujący DPC (DP control system) oznacza wszystkie komponenty i systemy sterujące, osprzęt oraz oprogramowanie niezbędne do dynamicznego pozycjonowania statku. W jego skład wchodzą: Układ komputerowy automatyczny (stacjonarny) lub układ półautomatyczny(przenośny) System czujników i sensorów Wyświetlacz(panel operatora) Pozycyjne systemy referencyjne dużej dokładności Okablowanie, przełączniki, przekaźniki i inne urządzenia pomocnicze
34 Budowa W szerszym ujęciu w systemie DP można wyróżnić następujące komponenty: System napędowy System zasilania Pozycyjne systemy referencyjne System czujników i sensorów pomiarowych System sterowania Konsola sterująca Operator systemu



35 Budowa System napędowy: Śruba okrętowa jedna lub dwie, najczęściej nastawna o stałych lub zmiennych obrotach



36 Budowa System napędowy: Ster zwykle zmodyfikowane urządzenia sterowe np. ster Beckera, ster Schillinga, ster z cylindrem obrotowym, ster z obrotową dyszą Korta




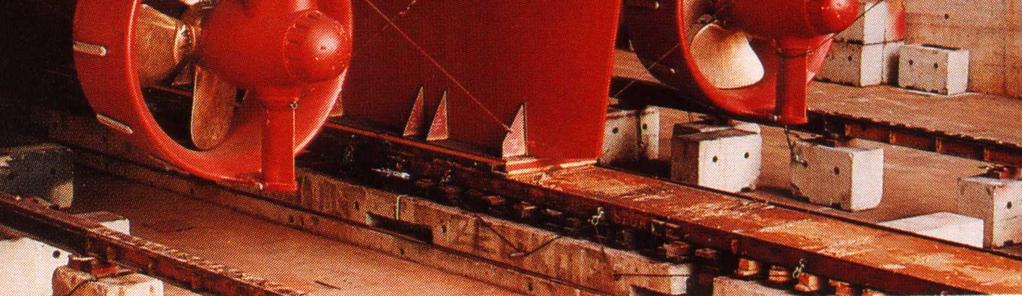
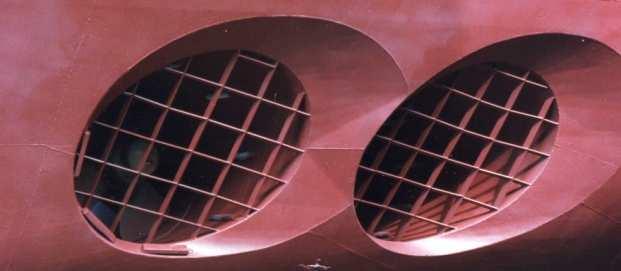
37 Budowa System napędowy: Pędniki azymutalne
38 Budowa System napędowy: Pędniki typu Azipod



39 Budowa System napędowy: Pędniki typu Azipod


40 Budowa System napędowy: Pędniki typu Voit-Schneider
41 Budowa System zasilania: Z systemu tego korzystają wszystkie podsystemy systemu DP. System ten musi więc charakteryzować się dużą elastycznością pracy, ze względu na możliwość zaistnienia gwałtownych zmian zapotrzebowania mocy wywołanych np. nieregularną pracą pędników okrętowych. System sterujący, konsola sterująca, wyświetlacze oraz systemy alarmowe i referencyjne systemu DP nawet w przypadku awarii głównego systemu zasilania będą mogły działać jeszcze przez co najmniej 30 minut.
42 Budowa Systemy referencyjne: Systemy referencyjne wchodzące w skład systemu DP muszą charakteryzować się wysoką dokładnością, dużą niezawodnością i ciągłością pracy. Liczba i typ wykorzystywanych systemów referencyjnych zależy od: Poziomu ryzyka związanego z wykonywaną operacją Wymaganego poziomu redundancji(nadmiarowości) Dostępności systemów referencyjnych Skutków utraty jednego lub więcej systemów referencyjnych Najczęściej stosowane są systemy satelitarne, mikrofalowe, laserowe, mechaniczne i hydroakustyczne


43 Budowa Czujniki pomiarowe: System czujników, sensorów i innych urządzeń pomiarowych służących do określenia parametrów ruchu statku, jego kursu, szacowania zakłóceń zewnętrznych oraz pomiaru innych parametrów lub czynników nieodzownych w procesie dynamicznego pozycjonowania.

44 Budowa Systemy sterowania i kontroli systemu: W pierwszych systemach DP wykorzystywano techniki analogowe, od roku 1968 wykorzystywane są techniki cyfrowe, a od roku 1980 mikroprocesory.


45 Budowa Praxis Konsole sterujące: BridgeMate Kongsberg

46 Budowa Systemy referencyjne Czujniki pomiarowe zorientowania jednostki Czujniki pomiarowe ruchów jednostki Czujniki pomiarowe czynników zewnętrznych Operator systemu Konsola sterująca System sterujący System napędowy System zasilania
Rozwój prac projektowych przemysłowego systemu wydobywania konkrecji z dna Oceanu Spokojnego poprzez realizację projektów badawczo-rozwojowych
 Rozwój prac projektowych przemysłowego systemu wydobywania konkrecji z dna Oceanu Spokojnego poprzez realizację projektów badawczo-rozwojowych prof. dr hab. inż. Tadeusz Szelangiewicz przygotowanie prezentacji:
Rozwój prac projektowych przemysłowego systemu wydobywania konkrecji z dna Oceanu Spokojnego poprzez realizację projektów badawczo-rozwojowych prof. dr hab. inż. Tadeusz Szelangiewicz przygotowanie prezentacji:
Temat pracy dyplomowej Promotor Dyplomant CENTRUM INŻYNIERII RUCHU MORSKIEGO. prof. dr hab. inż. kpt.ż.w. Stanisław Gucma.
 kierunek: Nawigacja, : Transport morski, w roku akademickim 2012/2013, Temat dyplomowej Promotor Dyplomant otrzymania 1. Nawigacja / TM 2. Nawigacja / TM dokładności pozycji statku określonej przy wykorzystaniu
kierunek: Nawigacja, : Transport morski, w roku akademickim 2012/2013, Temat dyplomowej Promotor Dyplomant otrzymania 1. Nawigacja / TM 2. Nawigacja / TM dokładności pozycji statku określonej przy wykorzystaniu
Przedmowa 12 Od wydawcy 15 Wykaz ważniejszych oznaczeń 16
 Spis treści Przedmowa 12 Od wydawcy 15 Wykaz ważniejszych oznaczeń 16 Rozdział 1. WPROWADZENIE 19 1.1. Porównanie stopnia trudności manewrowania statkami morskimi z kierowaniem innymi środkami transportu
Spis treści Przedmowa 12 Od wydawcy 15 Wykaz ważniejszych oznaczeń 16 Rozdział 1. WPROWADZENIE 19 1.1. Porównanie stopnia trudności manewrowania statkami morskimi z kierowaniem innymi środkami transportu
lp tematy pracy promotor dyplomant data otrzymania tematu uwagi ZAKŁAD URZĄDZEŃ NAWIGACYJNYCH
 Tematy prac dyplomowych inżynierskich dla studentów niestacjonarnych prowadzone przez nauczycieli akademickich Instytutu Inżynierii Ruchu Morskiego na rok akademicki 2008/2009 lp tematy pracy promotor
Tematy prac dyplomowych inżynierskich dla studentów niestacjonarnych prowadzone przez nauczycieli akademickich Instytutu Inżynierii Ruchu Morskiego na rok akademicki 2008/2009 lp tematy pracy promotor
Podstawy Automatyzacji Okrętu
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, specjalności okrętowe Podstawy Automatyzacji Okrętu 1 WPROWADZENIE M. H. Ghaemi Luty 2018 Podstawy automatyzacji
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, specjalności okrętowe Podstawy Automatyzacji Okrętu 1 WPROWADZENIE M. H. Ghaemi Luty 2018 Podstawy automatyzacji
Elektryczne napędy główne na statkach
 Elektryczne napędy główne na statkach Elżbieta Bogalecka 2017-02-05 1 Wiek XIX - silnik spalinowy 1860r. opatentowany pierwszy silnik spalinowy 1893r. R.Diesel patentuje silnik o zapłonie samoczynnym 80%
Elektryczne napędy główne na statkach Elżbieta Bogalecka 2017-02-05 1 Wiek XIX - silnik spalinowy 1860r. opatentowany pierwszy silnik spalinowy 1893r. R.Diesel patentuje silnik o zapłonie samoczynnym 80%
Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
 Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej Katedra Systemów Elektroniki Morskiej Stacja Badań Hydroakustycznych Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej Katedra Systemów Elektroniki Morskiej Stacja Badań Hydroakustycznych Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
PŁYWAJĄCA STACJA DEMAGNETYZACYJNA
 WSTĘP Remontowa Marine Design & Consulting (RMDC) pracuje nad nowymi projektami okrętów wojennych oraz okrętami wsparcia technicznego. Biorąc pod uwagę nowe wyzwania i wynikające z nich potrzeby Marynarki
WSTĘP Remontowa Marine Design & Consulting (RMDC) pracuje nad nowymi projektami okrętów wojennych oraz okrętami wsparcia technicznego. Biorąc pod uwagę nowe wyzwania i wynikające z nich potrzeby Marynarki
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Transport. Luty 2015. Automatyzacja statku 1.
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Transport Automatyzacja statku 1 WPROWADZENIE M. H. Ghaemi Luty 2015 Automatyzacja statku 1. Wprowadzenie 1 Kierunek:
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Transport Automatyzacja statku 1 WPROWADZENIE M. H. Ghaemi Luty 2015 Automatyzacja statku 1. Wprowadzenie 1 Kierunek:
MIROSŁAW TOMERA WIELOOPERACYJNE STEROWANIE RUCHEM STATKU W UKŁADZIE O STRUKTURZE PRZEŁĄCZALNEJ
 MIROSŁAW TOMERA WIELOOPERACYJNE STEROWANIE RUCHEM STATKU W UKŁADZIE O STRUKTURZE PRZEŁĄCZALNEJ Gdynia 2018 RECENZENCI: prof. dr hab. inż. Roman Śmierzchalski dr hab. inż. Witold Gierusz, prof. nadzw. AMG
MIROSŁAW TOMERA WIELOOPERACYJNE STEROWANIE RUCHEM STATKU W UKŁADZIE O STRUKTURZE PRZEŁĄCZALNEJ Gdynia 2018 RECENZENCI: prof. dr hab. inż. Roman Śmierzchalski dr hab. inż. Witold Gierusz, prof. nadzw. AMG
ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
 Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Katarzyna Żelazny*, Tadeusz Szelangiewicz* ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Katarzyna Żelazny*, Tadeusz Szelangiewicz* ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
Marzec Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Oceanotechnika, ZiMwGM
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Oceanotechnika, ZiMwGM Podstawy automatyzacji okrętu 1 WPROWADZENIE M. H. Ghaemi Marzec 2016 Podstawy automatyzacji
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, Oceanotechnika, ZiMwGM Podstawy automatyzacji okrętu 1 WPROWADZENIE M. H. Ghaemi Marzec 2016 Podstawy automatyzacji
Sterowanie układem zawieszenia magnetycznego
 Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
EFEKT K_K03 PRZEDMIOT
 K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 K_W15 K_W16 K_W17 K_W18 K_W71 K_U01 K_U02 K_U03 K_U04 K_U05 K_U06 K_U07 K_U08 K_U09 K_U10 K_U11 K_U12 K_U13 K_U14 K_U15
K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 K_W15 K_W16 K_W17 K_W18 K_W71 K_U01 K_U02 K_U03 K_U04 K_U05 K_U06 K_U07 K_U08 K_U09 K_U10 K_U11 K_U12 K_U13 K_U14 K_U15
ŻURAW PŁYWAJĄCY 200 ton DP-ZPS-Ś-3
 ŻURAW PŁYWAJĄCY 200 ton DP-ZPS-Ś-3 DANE OGÓLNE Jednostka, zbudowana została w 1991 roku, przez Stocznię im. A Warskiego w Szczecinie w/g przepisów i pod nadzorem PRS, posiada klasę : KM L₃ III Żuraw Pływający.
ŻURAW PŁYWAJĄCY 200 ton DP-ZPS-Ś-3 DANE OGÓLNE Jednostka, zbudowana została w 1991 roku, przez Stocznię im. A Warskiego w Szczecinie w/g przepisów i pod nadzorem PRS, posiada klasę : KM L₃ III Żuraw Pływający.
ANALIZA AWARII W UKŁADZIE ELEKTROENERGETYCZNYM SYSTEMU DYNAMICZNEGO POZYCJONOWANIA STATKU
 Maciej Dęsoł Akademia Morska w Gdyni ANALIZA AWARII W UKŁADZIE ELEKTROENERGETYCZNYM SYSTEMU DYNAMICZNEGO POZYCJONOWANIA STATKU Rozwój systemów dynamicznego pozycjonowania statku spowodował coraz większe
Maciej Dęsoł Akademia Morska w Gdyni ANALIZA AWARII W UKŁADZIE ELEKTROENERGETYCZNYM SYSTEMU DYNAMICZNEGO POZYCJONOWANIA STATKU Rozwój systemów dynamicznego pozycjonowania statku spowodował coraz większe
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne
 Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Fransiszek
Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Fransiszek
Bałtyckie Centrum Badawczo-Wdrożeniowe Gospodarki Morskiej i jego rola we wzmacnianiu innowacyjności Pomorza Zachodniego.
 Bałtyckie Centrum Badawczo-Wdrożeniowe Gospodarki Morskiej i jego rola we wzmacnianiu innowacyjności Pomorza Zachodniego. KONCEPCJA STRUKTURY ORGANIZACYJNEJ CENTRUM Zakład b-r górnictwa morskiego Prowadzenie
Bałtyckie Centrum Badawczo-Wdrożeniowe Gospodarki Morskiej i jego rola we wzmacnianiu innowacyjności Pomorza Zachodniego. KONCEPCJA STRUKTURY ORGANIZACYJNEJ CENTRUM Zakład b-r górnictwa morskiego Prowadzenie
Symulacyjne badanie wpływu systemu PNDS na bezpieczeństwo i efektywność manewrów
 dr inż. st. of. pokł. Stefan Jankowski Symulacyjne badanie wpływu systemu PNDS na bezpieczeństwo i efektywność manewrów słowa kluczowe: systemy pilotowe, systemy dokingowe, dokładność pozycjonowania, prezentacja
dr inż. st. of. pokł. Stefan Jankowski Symulacyjne badanie wpływu systemu PNDS na bezpieczeństwo i efektywność manewrów słowa kluczowe: systemy pilotowe, systemy dokingowe, dokładność pozycjonowania, prezentacja
Laboratorium LAB1. Moduł małej energetyki wiatrowej
 Laboratorium LAB1 Moduł małej energetyki wiatrowej Badanie charakterystyki efektywności wiatraka - kompletnego systemu (wiatrak, generator, akumulator) prędkość wiatru - moc produkowana L1-U1 Pełne badania
Laboratorium LAB1 Moduł małej energetyki wiatrowej Badanie charakterystyki efektywności wiatraka - kompletnego systemu (wiatrak, generator, akumulator) prędkość wiatru - moc produkowana L1-U1 Pełne badania
ZAKŁAD URZĄDZEŃ NAWIGACYJNYCH
 Tematy prac dyplomowych inżynierskich dla studentów dziennych prowadzone przez nauczycieli akademickich Instytutu Inżynierii Ruchu Morskiego na rok akademicki 2009/2010 lp tematy pracy promotor dyplomant
Tematy prac dyplomowych inżynierskich dla studentów dziennych prowadzone przez nauczycieli akademickich Instytutu Inżynierii Ruchu Morskiego na rok akademicki 2009/2010 lp tematy pracy promotor dyplomant
Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia
 IRM wykład 2 Parametry Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia maksymalnego statku /T. Wymiary
IRM wykład 2 Parametry Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia maksymalnego statku /T. Wymiary
PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA
 PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA 2010 Publikacje P (Przepisowe) wydawane przez Polski Rejestr Statków są uzupełnieniem lub rozszerzeniem Przepisów i stanowią
PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA 2010 Publikacje P (Przepisowe) wydawane przez Polski Rejestr Statków są uzupełnieniem lub rozszerzeniem Przepisów i stanowią
MODELE Z FILTREM KALMANA I ROZMYTE W SYSTEMACH DYNAMICZNEGO POZYCJONOWANIA. 1. Zadania stawiane systemowi dynamicznego pozycjonowania
 Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Paweł Zalewski* MODELE Z FILTREM KALMANA I ROZMYTE W SYSTEMACH DYNAMICZNEGO POZYCJONOWANIA 1. Zadania stawiane systemowi dynamicznego pozycjonowania Zgodnie
Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Paweł Zalewski* MODELE Z FILTREM KALMANA I ROZMYTE W SYSTEMACH DYNAMICZNEGO POZYCJONOWANIA 1. Zadania stawiane systemowi dynamicznego pozycjonowania Zgodnie
ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU.
 SPIS TREŚCI Przedmowa ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU. 1.1. Szerokość i długość geograficzna. Różnica długości. Różnica szerokości. 1.1.1.
SPIS TREŚCI Przedmowa ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU. 1.1. Szerokość i długość geograficzna. Różnica długości. Różnica szerokości. 1.1.1.
PLAN STUDIÓW. Jachty Statki morskie i obiekty oceanotechniczne Semestr III. Semestr IV liczba godzin liczba forma
 WYDZIAŁ: OCEANOTECHNIKI I OKRĘTOWNICTWA KIERUNEK: OCEANOTECHNIKA poziom kształcenia: studia drugiego stopnia profil : ogólnoakademicki forma studiów: stacjonarne PROJEKTOWANIE STATKÓW I URZĄDZEŃ OCEANOTECHNICZNYCH
WYDZIAŁ: OCEANOTECHNIKI I OKRĘTOWNICTWA KIERUNEK: OCEANOTECHNIKA poziom kształcenia: studia drugiego stopnia profil : ogólnoakademicki forma studiów: stacjonarne PROJEKTOWANIE STATKÓW I URZĄDZEŃ OCEANOTECHNICZNYCH
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Inżynieria Ruchu Morskiego wykład 01. Dr inż. Maciej Gucma Pok. 343 Tel //wykłady tu//
 Inżynieria Ruchu Morskiego wykład 01 Dr inż. Maciej Gucma Pok. 343 Tel. 91 4809 495 www.uais.eu //wykłady tu// m.gucma@am.szczecin.pl Zaliczenie Wykładu / Ćwiczeń Wykład zaliczenie pisemne Ćwiczenia -
Inżynieria Ruchu Morskiego wykład 01 Dr inż. Maciej Gucma Pok. 343 Tel. 91 4809 495 www.uais.eu //wykłady tu// m.gucma@am.szczecin.pl Zaliczenie Wykładu / Ćwiczeń Wykład zaliczenie pisemne Ćwiczenia -
Podstawy urządzeń okrętowych
 Podstawy urządzeń okrętowych - wykład semestr III ilość godzin - 30 Prowadzący: dr inż. Jacek Nakielski pokój 502B telefon 347-27-45 e-mail janak@pg.gda.pl Program zajęć: Podział i ogólna charakterystyka
Podstawy urządzeń okrętowych - wykład semestr III ilość godzin - 30 Prowadzący: dr inż. Jacek Nakielski pokój 502B telefon 347-27-45 e-mail janak@pg.gda.pl Program zajęć: Podział i ogólna charakterystyka
Wsparcie projektowania badaniami modelowymi na przykładzie projektu VIDAR. Przygotował: Tomasz Płotka - StoGda
 Wsparcie projektowania badaniami modelowymi na przykładzie projektu VIDAR Przygotował: Tomasz Płotka - StoGda Patrząc na niedawno wykonywane i bieżące projekty jak również szereg zapytań ofertowych jakie
Wsparcie projektowania badaniami modelowymi na przykładzie projektu VIDAR Przygotował: Tomasz Płotka - StoGda Patrząc na niedawno wykonywane i bieżące projekty jak również szereg zapytań ofertowych jakie
Podstawy urządzeń okrętowych
 Podstawy urządzeń okrętowych - wykład URZĄDZENIA STEROWE Literatura: Perepeczko Andrzej; Okrętowe urządzenia sterowe, Wyd. Morskie, Gdańsk 1983 (sygnatura II 181564, II 181565) Orszulok Wojciech, Wewiórski
Podstawy urządzeń okrętowych - wykład URZĄDZENIA STEROWE Literatura: Perepeczko Andrzej; Okrętowe urządzenia sterowe, Wyd. Morskie, Gdańsk 1983 (sygnatura II 181564, II 181565) Orszulok Wojciech, Wewiórski
Zintegrowany system wizualizacji parametrów nawigacyjnych w PNDS
 dr inż. kpt. ż.w. Andrzej Bąk Zintegrowany system wizualizacji parametrów nawigacyjnych w PNDS słowa kluczowe: PNDS, ENC, ECS, wizualizacja, sensory laserowe Artykuł opisuje sposób realizacji procesu wizualizacji
dr inż. kpt. ż.w. Andrzej Bąk Zintegrowany system wizualizacji parametrów nawigacyjnych w PNDS słowa kluczowe: PNDS, ENC, ECS, wizualizacja, sensory laserowe Artykuł opisuje sposób realizacji procesu wizualizacji
WYBRANE ASPEKTY STEROWANIA ZESPOŁ EM OKRĘ TOWYM POJAZD PODWODNY Ł ADUNEK
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLVI NR 3 (162) 25 WYBRANE ASPEKTY STEROWANIA ZESPOŁ EM OKRĘ TOWYM POJAZD PODWODNY Ł ADUNEK STRESZCZENIE W opracowaniu omówiono wybrane problemy pojawiające
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLVI NR 3 (162) 25 WYBRANE ASPEKTY STEROWANIA ZESPOŁ EM OKRĘ TOWYM POJAZD PODWODNY Ł ADUNEK STRESZCZENIE W opracowaniu omówiono wybrane problemy pojawiające
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
ŚRODKI I URZĄDZENIA TRANSPORTU OKREŚLENIE CHARAKTERYSTYK OPOROWYCH ORAZ WSTĘPNY DOBÓR SILNIKA NAPĘDOWEGO JEDNOSTKI PŁYWAJĄCEJ
 ŚRODKI I URZĄDZENIA TRANSPORTU OKREŚLENIE CHARAKTERYSTYK OPOROWYCH ORAZ WSTĘPNY DOBÓR SILNIKA NAPĘDOWEGO JEDNOSTKI PŁYWAJĄCEJ Charakterystyka oporowa: Sposoby wyznaczania charakterystyki oporowej: Badania
ŚRODKI I URZĄDZENIA TRANSPORTU OKREŚLENIE CHARAKTERYSTYK OPOROWYCH ORAZ WSTĘPNY DOBÓR SILNIKA NAPĘDOWEGO JEDNOSTKI PŁYWAJĄCEJ Charakterystyka oporowa: Sposoby wyznaczania charakterystyki oporowej: Badania
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Wykład 04 Popyt na usługi transportowe dr Adam Salomon
 Wykład 04 Popyt na usługi transportowe dr Adam Salomon Katedra Transportu i Logistyki Wydział Nawigacyjny Akademia Morska w Gdyni Postulaty przewozowe Postulaty przewozowe wymagania jakościowe zgłaszane
Wykład 04 Popyt na usługi transportowe dr Adam Salomon Katedra Transportu i Logistyki Wydział Nawigacyjny Akademia Morska w Gdyni Postulaty przewozowe Postulaty przewozowe wymagania jakościowe zgłaszane
Mechatronika i inteligentne systemy produkcyjne. Paweł Pełczyński ppelczynski@swspiz.pl
 Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
KRAJOWA IZBA GOSPODARKI MORSKIEJ POLISH CHAMBER OF MARITIME COMMERCE
 KRAJOWA IZBA GOSPODARKI MORSKIEJ POLISH CHAMBER OF MARITIME COMMERCE Informacja dotycząca kursów i szkoleń organizowanych przez Krajową Izbę Gospodarki Morskiej w Gdyni Informacje ogólne: Kursy organizowane
KRAJOWA IZBA GOSPODARKI MORSKIEJ POLISH CHAMBER OF MARITIME COMMERCE Informacja dotycząca kursów i szkoleń organizowanych przez Krajową Izbę Gospodarki Morskiej w Gdyni Informacje ogólne: Kursy organizowane
LOTOS Petrobaltic S.A.
 LOTOS Petrobaltic S.A. LOTOS Petrobaltic S.A. PLATFORMY WIERTNICZE JAKO ELEMENT MORSKIEGO 1 PLANU ZAGOSPODAROWANIA PRZESTRZENNEGO, Magdalena Jabłonowska Gdańsk, 12 kwietnia 2018 r. Magdalena Jabłonowska
LOTOS Petrobaltic S.A. LOTOS Petrobaltic S.A. PLATFORMY WIERTNICZE JAKO ELEMENT MORSKIEGO 1 PLANU ZAGOSPODAROWANIA PRZESTRZENNEGO, Magdalena Jabłonowska Gdańsk, 12 kwietnia 2018 r. Magdalena Jabłonowska
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Nabycie wiedzy podstawowej o pracach hydrograficznych dla potrzeb oceanotechnicznych EFEKTY KSZTAŁCENIA
 C I. KARTA PRZEDMIOTU. Nazwa przedmiotu: PRZYBRZEŻNE PRACE HYDROGRAFICZNE. Kod przedmiotu: Ve 3. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego. Kierunek: Nawigacja. Specjalność: Hydrografia
C I. KARTA PRZEDMIOTU. Nazwa przedmiotu: PRZYBRZEŻNE PRACE HYDROGRAFICZNE. Kod przedmiotu: Ve 3. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego. Kierunek: Nawigacja. Specjalność: Hydrografia
SPERRY - SIECIOWE ROZWIĄZANIA NAWIGACYJNE DLA OKRĘTÓW
 aut. Maksymilian Dura 14.07.2018 SPERRY - SIECIOWE ROZWIĄZANIA NAWIGACYJNE DLA OKRĘTÓW W czasie targów Balt Military Expo 2018 spółka Else zaprezentowała po raz pierwszy w Polsce dwa najnowsze rozwiązania
aut. Maksymilian Dura 14.07.2018 SPERRY - SIECIOWE ROZWIĄZANIA NAWIGACYJNE DLA OKRĘTÓW W czasie targów Balt Military Expo 2018 spółka Else zaprezentowała po raz pierwszy w Polsce dwa najnowsze rozwiązania
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
T 2000 Tester transformatorów i przekładników
 T 2000 Tester transformatorów i przekładników T2000 - Wielozadaniowy system pomiaru przekładników prądowych, napięciowych, transformatorów, zabezpieczeń nadprądowych, liczników energii i przetworników.
T 2000 Tester transformatorów i przekładników T2000 - Wielozadaniowy system pomiaru przekładników prądowych, napięciowych, transformatorów, zabezpieczeń nadprądowych, liczników energii i przetworników.
SYSTEM PODEJMOWANIA DECYZJI WSPOMAGAJĄCY DOBÓR NASTAW UKŁADU NAPĘDOWEGO STATKU ZE ŚRUBĄ NASTAWNĄ
 Krzysztof Rudzki, Wiesław Tarełko 1 SYSTEM PODEJMOWANIA DECYZJI WSPOMAGAJĄCY DOBÓR NASTAW UKŁADU NAPĘDOWEGO STATKU ZE ŚRUBĄ NASTAWNĄ Wstęp Armatorzy statków są zainteresowani jak najmniejszymi kosztami
Krzysztof Rudzki, Wiesław Tarełko 1 SYSTEM PODEJMOWANIA DECYZJI WSPOMAGAJĄCY DOBÓR NASTAW UKŁADU NAPĘDOWEGO STATKU ZE ŚRUBĄ NASTAWNĄ Wstęp Armatorzy statków są zainteresowani jak najmniejszymi kosztami
Sterowanie Napędów Maszyn i Robotów
 Wykład 3 - Metodyka projektowania sterowania. Opis bilansowy Instytut Automatyki i Robotyki Warszawa, 2015 Metodyka projektowania sterowania Zrozumienie obiektu, możliwości, ograniczeń zapoznanie się z
Wykład 3 - Metodyka projektowania sterowania. Opis bilansowy Instytut Automatyki i Robotyki Warszawa, 2015 Metodyka projektowania sterowania Zrozumienie obiektu, możliwości, ograniczeń zapoznanie się z
Dziennik Ustaw 15 Poz. 460 ZAKRES WYMAGAŃ EGZAMINACYJNYCH
 Dziennik Ustaw 15 Poz. 460 Załącznik nr 4 ZAKRES WYMAGAŃ EGZAMINACYJNYCH I. Zakres wiedzy i umiejętności wymaganych do uzyskania patentu żeglarza jachtowego. 1) budowa jachtów, w tym: a) zasady obsługi
Dziennik Ustaw 15 Poz. 460 Załącznik nr 4 ZAKRES WYMAGAŃ EGZAMINACYJNYCH I. Zakres wiedzy i umiejętności wymaganych do uzyskania patentu żeglarza jachtowego. 1) budowa jachtów, w tym: a) zasady obsługi
(54) (13)B1 PL B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)165054
 (13)B1 PL B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)165054") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)165054 (13)B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 289981 (22) Data zgłoszenia: 19.04.1991 (51) IntCl5: B63B 39/14 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)165054 (13)B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 289981 (22) Data zgłoszenia: 19.04.1991 (51) IntCl5: B63B 39/14 (54)
GÓRNICTWO MORSKIE W DZIAŁALNOŚCI LUDZKIEJ NA MORZU. 1. Działalność ludzka na morzu. Wacław Morgaś*, Zdzisław Kopacz*
 Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Wacław Morgaś*, Zdzisław Kopacz* GÓRNICTWO MORSKIE W DZIAŁALNOŚCI LUDZKIEJ NA MORZU 1. Działalność ludzka na morzu Działalność ludzka na morzu jest bardzo
Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Wacław Morgaś*, Zdzisław Kopacz* GÓRNICTWO MORSKIE W DZIAŁALNOŚCI LUDZKIEJ NA MORZU 1. Działalność ludzka na morzu Działalność ludzka na morzu jest bardzo
2013-04-25. Czujniki obiektowe Sterowniki przemysłowe
 Ogólne informacje o systemach komputerowych stosowanych w sterowaniu ruchem funkcje, właściwości Sieci komputerowe w sterowaniu informacje ogólne, model TCP/IP, protokoły warstwy internetowej i transportowej
Ogólne informacje o systemach komputerowych stosowanych w sterowaniu ruchem funkcje, właściwości Sieci komputerowe w sterowaniu informacje ogólne, model TCP/IP, protokoły warstwy internetowej i transportowej
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Nowe rozwiązania w układach sterowania firmy Tester
 Nowe rozwiązania w układach sterowania firmy Tester Świebodzice 05.07.2017 Firma TESTER SP. Z O.O. realizuje aktualnie projekt pt. Wprowadzenie na rynek nowoczesnych układów sterowania dzięki zastosowaniu
Nowe rozwiązania w układach sterowania firmy Tester Świebodzice 05.07.2017 Firma TESTER SP. Z O.O. realizuje aktualnie projekt pt. Wprowadzenie na rynek nowoczesnych układów sterowania dzięki zastosowaniu
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Próby ruchowe dźwigu osobowego
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
UKŁAD ROZRUCHU TYPU ETR 1200 DO SILNIKA PIERŚCIENIOWEGO O MOCY 1200 KW. Opis techniczny
 TYPU DO SILNIKA PIERŚCIENIOWEGO O MOCY 1200 KW Opis techniczny Gdańsk, maj 2016 Strona: 2/9 KARTA ZMIAN Nr Opis zmiany Data Nazwisko Podpis 1 2 3 4 5 6 7 8 9 10 Strona: 3/9 Spis treści 1. Przeznaczenie
TYPU DO SILNIKA PIERŚCIENIOWEGO O MOCY 1200 KW Opis techniczny Gdańsk, maj 2016 Strona: 2/9 KARTA ZMIAN Nr Opis zmiany Data Nazwisko Podpis 1 2 3 4 5 6 7 8 9 10 Strona: 3/9 Spis treści 1. Przeznaczenie
Potencjał usługowo-produkcyjny
 Budowa konstrukcji offshore CRIST S.A. Potencjał usługowo-produkcyjny CRIST S.A. ul. Swojska 12, Gdańsk 80-867, tel.: (+48 58) 769 33 00, fax: (+48 58) 769 33 01, e-mail: crist@crist.com.pl W profilu produkcyjnym
Budowa konstrukcji offshore CRIST S.A. Potencjał usługowo-produkcyjny CRIST S.A. ul. Swojska 12, Gdańsk 80-867, tel.: (+48 58) 769 33 00, fax: (+48 58) 769 33 01, e-mail: crist@crist.com.pl W profilu produkcyjnym
Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0
 Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0 Instrukcja obsługi Wrzesień 2014 Szkoper Elektronik Strona 1 2014-09-29 1 Parametry techniczne: Cyfrowy pomiar temperatury w zakresie od -40 C do 120
Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0 Instrukcja obsługi Wrzesień 2014 Szkoper Elektronik Strona 1 2014-09-29 1 Parametry techniczne: Cyfrowy pomiar temperatury w zakresie od -40 C do 120
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: TEORIA I BUDOWA OKRĘTU. Kod przedmiotu: Ubo 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność: Eksploatacja
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: TEORIA I BUDOWA OKRĘTU. Kod przedmiotu: Ubo 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność: Eksploatacja
Wymagania stawiane systemom dynamicznego pozycjonowania statków oraz możliwości ich weryfikacji
 Jerzy Herdzik 1 Wymagania stawiane systemom dynamicznego pozycjonowania statków oraz możliwości ich weryfikacji Uwagi wstępne Koncepcja systemów dynamicznego pozycjonowania statków sięga 1960 roku, kiedy
Jerzy Herdzik 1 Wymagania stawiane systemom dynamicznego pozycjonowania statków oraz możliwości ich weryfikacji Uwagi wstępne Koncepcja systemów dynamicznego pozycjonowania statków sięga 1960 roku, kiedy
UNIKANIE NIEBEZPIECZNYCH SYTUACJI W ZŁYCH WARUNKACH POGODOWYCH W RUCHU STATKU NA FALI NADĄŻAJĄCEJ
 MIROSŁAW JURDZIŃSKI Akademia Morska w Gdyni Katedra Nawigacji UNIKANIE NIEBEZPIECZNYCH SYTUACJI W ZŁYCH WARUNKACH POGODOWYCH W RUCHU STATKU NA FALI NADĄŻAJĄCEJ Podstawową zasadą planowania nawigacji jest
MIROSŁAW JURDZIŃSKI Akademia Morska w Gdyni Katedra Nawigacji UNIKANIE NIEBEZPIECZNYCH SYTUACJI W ZŁYCH WARUNKACH POGODOWYCH W RUCHU STATKU NA FALI NADĄŻAJĄCEJ Podstawową zasadą planowania nawigacji jest
Automatyka chłodnicza
 POLITECHNIKA GDAŃSKA Automatyka chłodnicza Temat: Układy automatyki nowoczesnych central klimatyzacyjnych bez odzysku ciepła Jakub Ryń Katedra Techniki Cieplnej Systemy, Urządzenia Chłodnicze i Klimatyzacyjne
POLITECHNIKA GDAŃSKA Automatyka chłodnicza Temat: Układy automatyki nowoczesnych central klimatyzacyjnych bez odzysku ciepła Jakub Ryń Katedra Techniki Cieplnej Systemy, Urządzenia Chłodnicze i Klimatyzacyjne
DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ
 DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ Warszawa, dnia 5 października 2015 r. Poz. 1535 ROZPORZĄDZENIE MINISTRA INFRASTRUKTURY I ROZWOJU 1) z dnia 22 września 2015 r. zmieniające rozporządzenie w sprawie
DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ Warszawa, dnia 5 października 2015 r. Poz. 1535 ROZPORZĄDZENIE MINISTRA INFRASTRUKTURY I ROZWOJU 1) z dnia 22 września 2015 r. zmieniające rozporządzenie w sprawie
KLASYFIKACJI I BUDOWY STATKÓW MORSKICH
 PRZEPISY KLASYFIKACJI I BUDOWY STATKÓW MORSKICH ZMIANY NR 1/2013 do CZĘŚCI IV STATECZNOŚĆ I NIEZATAPIALNOŚĆ 2010 GDAŃSK Zmiany Nr 1/2013 do Części IV Stateczność i niezatapialność 2010, Przepisów klasyfikacji
PRZEPISY KLASYFIKACJI I BUDOWY STATKÓW MORSKICH ZMIANY NR 1/2013 do CZĘŚCI IV STATECZNOŚĆ I NIEZATAPIALNOŚĆ 2010 GDAŃSK Zmiany Nr 1/2013 do Części IV Stateczność i niezatapialność 2010, Przepisów klasyfikacji
PL B BUP 12/13. ANDRZEJ ŚWIERCZ, Warszawa, PL JAN HOLNICKI-SZULC, Warszawa, PL PRZEMYSŁAW KOŁAKOWSKI, Nieporęt, PL
 PL 222132 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222132 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 397310 (22) Data zgłoszenia: 09.12.2011 (51) Int.Cl.
PL 222132 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222132 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 397310 (22) Data zgłoszenia: 09.12.2011 (51) Int.Cl.
Polskie Towarzystwo Medycyny i Techniki Hiperbarycznej 67
 Polish Hyperbaric Research M. Kozłowska MOŻLIWOŚCI MONITOROWANIA RUCHU OBIEKTÓW PODWODNYCH W HYDROGRAFII MORSKIEJ Pozycjonowanie, a w konsekwencji monitorowanie ruchu obiektów na powierzchni Ziemi obecnie
Polish Hyperbaric Research M. Kozłowska MOŻLIWOŚCI MONITOROWANIA RUCHU OBIEKTÓW PODWODNYCH W HYDROGRAFII MORSKIEJ Pozycjonowanie, a w konsekwencji monitorowanie ruchu obiektów na powierzchni Ziemi obecnie
MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ
 Mgr inż. Kamil DZIĘGIELEWSKI Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.232 MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ Streszczenie: W niniejszym referacie zaprezentowano stanowisko
Mgr inż. Kamil DZIĘGIELEWSKI Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.232 MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ Streszczenie: W niniejszym referacie zaprezentowano stanowisko
BADANIE WŁAŚCIWOŚCI KOMPUTEROWEGO SYSTEMU POMIAROWO-DIAGNOSTYCZNEGO
 ZAKŁAD EKSPLOATACJI SYSTEMÓW ELEKTRONICZNYCH INSTYTUT SYSTEMÓW ELEKTRONICZNYCH WYDZIAŁ ELEKTRONIKI WOJSKOWA AKADEMIA TECHNICZNA ---------------------------------------------------------------------------------------------------------------
ZAKŁAD EKSPLOATACJI SYSTEMÓW ELEKTRONICZNYCH INSTYTUT SYSTEMÓW ELEKTRONICZNYCH WYDZIAŁ ELEKTRONIKI WOJSKOWA AKADEMIA TECHNICZNA ---------------------------------------------------------------------------------------------------------------
IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA
 IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA 1 CEL IDENTYFIKACJI ZATOPIONYCH JEDNOSTEK - Zagrożenie
IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA 1 CEL IDENTYFIKACJI ZATOPIONYCH JEDNOSTEK - Zagrożenie
4. Sylwetka absolwenta
 1. Technik elektrykto zawód szerokoprofilowy, obejmujący wiedzę z różnych dziedzin elektrotechniki skupionych wokół wytwarzania, przetwarzania, przesyłania, rozdziału i użytkowania energii elektrycznej.
1. Technik elektrykto zawód szerokoprofilowy, obejmujący wiedzę z różnych dziedzin elektrotechniki skupionych wokół wytwarzania, przetwarzania, przesyłania, rozdziału i użytkowania energii elektrycznej.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
UKŁAD AUTOMATYCZNEJ REGULACJI STACJI TRANSFORMATOROWO - PRZESYŁOWYCH TYPU ARST
 Oddział Gdańsk JEDNOSTKA BADAWCZO-ROZWOJOWA ul. Mikołaja Reja 27, 80-870 Gdańsk tel. (48 58) 349 82 00, fax: (48 58) 349 76 85 e-mail: ien@ien.gda.pl http://www.ien.gda.pl ZAKŁAD TECHNIKI MIKROPROCESOROWEJ
Oddział Gdańsk JEDNOSTKA BADAWCZO-ROZWOJOWA ul. Mikołaja Reja 27, 80-870 Gdańsk tel. (48 58) 349 82 00, fax: (48 58) 349 76 85 e-mail: ien@ien.gda.pl http://www.ien.gda.pl ZAKŁAD TECHNIKI MIKROPROCESOROWEJ
Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach. Krzysztof Żurek Gdańsk,
 Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach Krzysztof Żurek Gdańsk, 2015-06-10 Plan Prezentacji 1. Manipulatory. 2. Wprowadzenie do Metody Elementów Skończonych (MES).
Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach Krzysztof Żurek Gdańsk, 2015-06-10 Plan Prezentacji 1. Manipulatory. 2. Wprowadzenie do Metody Elementów Skończonych (MES).
MMB Drives 40 Elektrownie wiatrowe
 Elektrownie wiatrowe MMB Drives Zbigniew Krzemiński, Prezes Zarządu Elektrownie wiatrowe produkowane przez MMB Drives zostały tak zaprojektowane, aby osiągać wysoki poziom produkcji energii elektrycznej
Elektrownie wiatrowe MMB Drives Zbigniew Krzemiński, Prezes Zarządu Elektrownie wiatrowe produkowane przez MMB Drives zostały tak zaprojektowane, aby osiągać wysoki poziom produkcji energii elektrycznej
6.4 WZMACNIACZE ASTOR GE INTELLIGENT PLATFORMS - SERWONAPĘDY VERSAMOTION
 6.4 WZMACNIACZE Wzmacniacz naleŝy dobrać tak, aby był kompatybilny pod względem mocy, ze sterowanym przez niego silnikiem. Numery katalogowe wzmacniaczy Nr katalogowy Moc Zasilanie IC800VMA012 100 W 1-fazowe
6.4 WZMACNIACZE Wzmacniacz naleŝy dobrać tak, aby był kompatybilny pod względem mocy, ze sterowanym przez niego silnikiem. Numery katalogowe wzmacniaczy Nr katalogowy Moc Zasilanie IC800VMA012 100 W 1-fazowe
Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych
 Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych Czujniki pomiarowe kursu - żyrokompasy W zależności od wymaganego poziomu redundancji dwa, trzy lub więcej żyrokompasów (monitorowanie
Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych Czujniki pomiarowe kursu - żyrokompasy W zależności od wymaganego poziomu redundancji dwa, trzy lub więcej żyrokompasów (monitorowanie
GRZEGORZ RUTKOWSKI doi. 10.12716/1002.27.04 Akademia Morska w Gdyni Katedra Nawigacji
 GRZEGORZ RUTKOWSKI doi. 10.12716/1002.27.04 Akademia Morska w Gdyni Katedra Nawigacji ANALIZA RÓŻNYCH METOD POZYCJONOWANIA JEDNOSTEK MORSKICH W SEKTORZE OFF-SHORE Z UWZGLĘDNIENIEM METODY DYNAMICZNEGO POZYCJONOWANIA
GRZEGORZ RUTKOWSKI doi. 10.12716/1002.27.04 Akademia Morska w Gdyni Katedra Nawigacji ANALIZA RÓŻNYCH METOD POZYCJONOWANIA JEDNOSTEK MORSKICH W SEKTORZE OFF-SHORE Z UWZGLĘDNIENIEM METODY DYNAMICZNEGO POZYCJONOWANIA
T. 32 KLASYFIKACJA I OGÓLNA CHARAKTERYSTYKA BUDOWLI HYDROTECHNICZNYCH ŚRÓDLĄDOWYCH I MORSKICH
 T. 32 KLASYFIKACJA I OGÓLNA CHARAKTERYSTYKA BUDOWLI HYDROTECHNICZNYCH ŚRÓDLĄDOWYCH I MORSKICH RODZAJE BUDOWLI HYDROTECHNICZNYCH Budowla hydrotechniczna to budowla służąca gospodarce wodnej, kształtowaniu
T. 32 KLASYFIKACJA I OGÓLNA CHARAKTERYSTYKA BUDOWLI HYDROTECHNICZNYCH ŚRÓDLĄDOWYCH I MORSKICH RODZAJE BUDOWLI HYDROTECHNICZNYCH Budowla hydrotechniczna to budowla służąca gospodarce wodnej, kształtowaniu
Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej
 Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej z wykorzystaniem sterownika PLC Treść zadania Program ma za zadanie sterować turbiną elektrowni wiatrowej, w zależności od
Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej z wykorzystaniem sterownika PLC Treść zadania Program ma za zadanie sterować turbiną elektrowni wiatrowej, w zależności od
ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE
 AKADEMII MORSKIEJ W SZCZECINIE") ISSN 0209-2069 ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE EXPLO-SHIP 2004 Tadeusz Szelangiewicz, Katarzyna Żelazny Prognozowanie charakterystyk napędowych statku ze śrubą stałą podczas pływania
ISSN 0209-2069 ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE EXPLO-SHIP 2004 Tadeusz Szelangiewicz, Katarzyna Żelazny Prognozowanie charakterystyk napędowych statku ze śrubą stałą podczas pływania
(12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1
 OPIS PATENTOWY (19) PL (11) 180337 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 319308 (22) Data zgłoszenia: 06.09.1995 (86) Data i numer zgłoszenia
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 319308 (22) Data zgłoszenia: 06.09.1995 (86) Data i numer zgłoszenia
Program praktyk zawodowych dla klasy trzeciej Technikum Elektrycznego
 Praca przy obsłudze i konserwacji urządzeń elektroenergetycznych (w zakładach wytwarzających lub przesyłających energię elektryczną) przygotować osprzęt elektroenergetyczny do budowy sieci i rozdzielni,
Praca przy obsłudze i konserwacji urządzeń elektroenergetycznych (w zakładach wytwarzających lub przesyłających energię elektryczną) przygotować osprzęt elektroenergetyczny do budowy sieci i rozdzielni,
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
CEL PRZEDMIOTU. Zapoznanie z podstawowym układem sił i momentów działających na statek w ruchu.
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: MANEWROWANIE JEDNOSTKĄ PŁYWAJACĄ. Kod przedmiotu: Xp. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4. Kierunek: Nawigacja 5. Specjalność: Wszystkie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: MANEWROWANIE JEDNOSTKĄ PŁYWAJACĄ. Kod przedmiotu: Xp. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4. Kierunek: Nawigacja 5. Specjalność: Wszystkie
Table of Contents. Lucas Nülle GmbH 1/6
 Table of Contents Table of Contents Maszyny, technika napędów Przemyslowa technika napedu 300 W EDT 32 Pozycjonowanie za pomoca synchronicznych napedów serwo 1 2 2 3 Lucas Nülle GmbH 1/6 www.lucas-nuelle.pl
Table of Contents Table of Contents Maszyny, technika napędów Przemyslowa technika napedu 300 W EDT 32 Pozycjonowanie za pomoca synchronicznych napedów serwo 1 2 2 3 Lucas Nülle GmbH 1/6 www.lucas-nuelle.pl
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 3 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 3 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
MMB Drives 40 Elektrownie wiatrowe
 Elektrownie wiatrowe MMB Drives Zbigniew Krzemiński, Prezes Zarządu Elektrownie wiatrowe produkowane przez MMB Drives zostały tak zaprojektowane, aby osiągać wysoki poziom produkcji energii elektrycznej
Elektrownie wiatrowe MMB Drives Zbigniew Krzemiński, Prezes Zarządu Elektrownie wiatrowe produkowane przez MMB Drives zostały tak zaprojektowane, aby osiągać wysoki poziom produkcji energii elektrycznej
SPRĘŻ WENTYLATORA stosunek ciśnienia statycznego bezwzględnego w płaszczyźnie
 DEFINICJE OGÓLNE I WIELKOŚCI CHARAKTERYSTYCZNE WENTYLATORA WENTYLATOR maszyna wirnikowa, która otrzymuje energię mechaniczną za pomocą jednego wirnika lub kilku wirników zaopatrzonych w łopatki, użytkuje
DEFINICJE OGÓLNE I WIELKOŚCI CHARAKTERYSTYCZNE WENTYLATORA WENTYLATOR maszyna wirnikowa, która otrzymuje energię mechaniczną za pomocą jednego wirnika lub kilku wirników zaopatrzonych w łopatki, użytkuje
Silniki AJM ARL ATD AUY
 Silniki AJM AUY Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C). Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości. Obroty silnika.
Silniki AJM AUY Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C). Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości. Obroty silnika.
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Pomieszczeniowy zadajnik temperatury
 1 67 Pomieszczeniowy zadajnik temperatury do współpracy z regulatorami ogrzewania QAW70 Cyfrowy, wielofunkcyjny zadajnik pomieszczeniowy do wygodnej obsługi regulatora grzewczego z pomieszczenia mieszkalnego.
1 67 Pomieszczeniowy zadajnik temperatury do współpracy z regulatorami ogrzewania QAW70 Cyfrowy, wielofunkcyjny zadajnik pomieszczeniowy do wygodnej obsługi regulatora grzewczego z pomieszczenia mieszkalnego.
TRÓJFAZOWY ELEKTRONICZNY PRZEMIENNIK CZĘSTOTLIWOŚCI
 NOCCHI CPS3-10 ŁATWA INSTALACJA, NISKI POBÓR MOCY, KOMPAKTOWE WYMIARY CPS 3-10 to urządzenie elektroniczne służące do płynnej zmiany prędkości obrotowej silnika pompy. Zabudowane bezpośrednio na silniku,
NOCCHI CPS3-10 ŁATWA INSTALACJA, NISKI POBÓR MOCY, KOMPAKTOWE WYMIARY CPS 3-10 to urządzenie elektroniczne służące do płynnej zmiany prędkości obrotowej silnika pompy. Zabudowane bezpośrednio na silniku,
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ELEKTROENERGETYKA OKRĘTOWA. Kod przedmiotu: Eeo 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność:
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ELEKTROENERGETYKA OKRĘTOWA. Kod przedmiotu: Eeo 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność:
Stanowisko wzorcowe siły do 5 kn jest przeznaczone do odtwarzania jednostki miary siły w zakresie N. Stanowisko umożliwia wzorcowanie
 Stanowisko wzorcowe siły do 5 kn jest przeznaczone do odtwarzania jednostki miary siły w zakresie 100-5000 N. Stanowisko umożliwia wzorcowanie siłomierzy dla sił ściskających i rozciągających z niepewnością
Stanowisko wzorcowe siły do 5 kn jest przeznaczone do odtwarzania jednostki miary siły w zakresie 100-5000 N. Stanowisko umożliwia wzorcowanie siłomierzy dla sił ściskających i rozciągających z niepewnością