Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych
|
|
|
- Marcin Krupa
- 6 lat temu
- Przeglądów:
Transkrypt


1
2 Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych



3 Czujniki pomiarowe kursu - żyrokompasy W zależności od wymaganego poziomu redundancji dwa, trzy lub więcej żyrokompasów (monitorowanie różnic we wskazaniach)


4 Czujniki pomiarowe kursu -kompasy satelitarne funkcja rezerwowa
5 Czujniki pomiarowe kursu -kompasy satelitarne Seatex Seapath Pomiar kursu rzeczywistego w dowolnym punkcie na powierzchni Ziemi Duża dokładność pomiaru kursu niezależnie od szerokości geograficznej Zastąpienie kilku urządzeń nawigacyjnych (GPS, log, żyrokompas) Możliwość ustalenia kierunku ruchu nawet przy krótkotrwałych zaników sygnału GPS Stabilna wartość kursu rzeczywistego w czasie cyrkulacji i tuż po niej Wiarygodna i dokładna pozycja geograficzna statku
6 Czujniki pomiarowe kursu -kompasy satelitarne Seatex Seapath Możliwość wyznaczenia pozycji geograficznej dowolnego punktu wyznaczonego przez użytkownika Dokładny pomiar przechyłów wzdłużnych i bocznych oraz wartości kąta myszkowania Dokładny pomiar prędkości statku nad dnem oraz prędkości obrotowej Częstotliwość odświeżania 20Hz Niewielkie wymiary i małe zużycie mocy Stosunkowo niski koszt instalacji
7 Czujniki pomiarowe kursu -kompasy satelitarne Seatex Seapath Statyczny pomiar kierunku ruchu do ±0,3 Dynamiczny pomiar kierunku ruchu do ±0,5 Wskazanie kierunku z rozdzielczością do ±0,01 Informacje o kierunku ruchu możliwe do uzyskania przy przechyłach bocznych i wzdłużnych do ±30 Dokładność pomiaru prędkości kątowej statku (ROT) w granicach ±0,5 /min Dokładność pomiaru wartości przechyłów bocznych i wzdłużnych do ±0,3 Dokładność pozycji do 5 metrów (0,95) w trybie dgps Dokładność pomiaru prędkości ±0,1m/s (0,95) w trybie dgps

8 Czujniki pomiarowe kursu - kompasy satelitarne
9 Czujniki pomiarowe ruchów własnych Ruchy w płaszczyźnie pionowej (kołysania, kiwania i nurzania) nie są kompensowane, znajomość ich aktualnych wartości konieczna jest w procesie stabilizacji Czujniki typu wahadłowego Urządzenia stabilizowane płynem VRU VRU/GPS Czujniki inercyjne
10 Czujniki pomiarowe ruchów własnych Czujniki typu wahadłowego dwa czujniki zamocowane na stałe w płaszczyźnie wzdłużnej i poprzecznej statku. Wartości kołysańi kiwań wyznaczane są poprzez pomiar składowej siły ciężkości: Zalety: Niski koszt Dobre osiągi w warunkach statycznych Wady: Niska dokładność Słabe osiągi w warunkach dynamicznych Niska częstość odświeżania danych, duża zwłoka Brak informacji o nurzaniach

11 Czujniki pomiarowe ruchów własnych VRU verticalreferenceunit jako czujniki wykorzystywane są cewki umieszczone w cieczy o dużej lepkości. Odczyt następuje dzięki zmianie natężenia pól magnetycznych generowanych równolegle do osi kołysańi kiwań. Pola te generowane są przez dwie cewki, a ich zmiany rejestrowane są przez cewkę pomiarową zamocowaną do stabilizowanej platformy Zalety: Wystarczająca dokładność dla stabilizacji pomiarów GPS oraz systemów hydroakustycznych Niski koszt instalacji Duży wybór dostępnych czujników Wady: Brak informacji o zorientowaniu (kursie) Brak informacji o nurzaniu

12 Czujniki pomiarowe ruchów własnych VRU/GPS: Zalety: Zapewnienie danych dotyczących pozycji oraz zorientowania Wysoka dokładność Wady: Stosunkowo duże koszty instalacji Dane dotyczące pozycji i zorientowania zależne od systemu GPS Brak informacji o nurzaniu


13 Czujniki pomiarowe ruchów własnych Czujniki inercyjne wykorzystują ortogonalne układy trzech akcelerometrów liniowych i trzech akcelerometrów kątowych (np. żyroskopowych) Zalety: Możliwość określenia całkowitej wartości błędów wynikających z ruchów jednostki Niezależność od systemu GPS Wysoka dokładność Współpraca z systemami IBS Wady: Stosunkowo duże koszty instalacji

14 Czujniki pomiarowe siły i kierunku wiatru Wiatromierze (anemometry): Mechaniczne Ultradźwiękowe Dokładność: Prędkości ok. 1% Kierunku ok. 5
15 Czujniki pomiarowe siły i kierunku wiatru Prawidłowo zainstalowany wiatromierz powinien znajdować się w miejscu w którym nie będzie znajdował się w polu martwym żadnej części konstrukcyjnej statku. Czynniki wpływające na pomiar: Turbulencje od konstrukcji Lądujące śmigłowce Wylot gazów produkcyjnych
16 Czujniki pomiarowe siły i kierunku wiatru Turbulencje od konstrukcji WINDSENSOR EXPOSED WIND WIND VESSEL HULL AND SUPERSTRUCTURE IN WINDSHADOW STRUCTURE FORCE OF WIND EXAGGERATED AT WINDSENSOR WINDSENSOR EXPOSED TO FULL FORCE OF WIND PLATFORM VESSEL IN LEE OF PLATFORM EVERY GUST CAUSES VESSEL TO DRIVE TOWARD PLATFORM AND LOSE HEADING VESSEL EXCURSION
17 Czujniki pomiarowe siły i kierunku wiatru Lądujące śmigłowce DOWNDRAFT FROM HELICOPTER ROTOR BLADES MAY CAUSE WINDSENSOR TO INPUT FALSE HIGH VALUES THUS DESTABILISING THE DP CAPABILITY
18 Czujniki pomiarowe siły i kierunku wiatru Wylot gazów produkcyjnych WINDSENSOR PROBLEM - PLATFORM EXHAUST PLATFORM GENERATOR EXHAUST WINDSENSOR GENERATOR START CAUSES LOCALISED "GALE" AT THE WINDSENSOR. VESSEL REACTS WITH A VIOLENT DRIVE TOWARD THE PLATFORM
19 Czujniki pomiarowe siły i kierunku wiatru Rozmieszczenie wiatromierzy WINDSENSOR LOCATION WINDSENSORS LOCATED IN POSITIONS 1 AND 2 WILL GIVE INPUT DISTORTED BY TURBULENCE FROM STRUCTURE LOCATIONS 3 AND 4 ARE BETTER BUT INPUT MAY NEED TO BE SCALED DOWN DUE TO ALTITUDE EXAGGERATING THE WIND STRENGTH


20 Czujniki środowiskowe falomierze Boje hydrometeorologiczne

21 Czujniki środowiskowe prądomierze Kierunek i prędkość prądu wyznaczana jest analogiczny sposób jak prędkość statku (wykorzystanie logów)

22 Sensory pomocnicze: Sensor zanurzenia statku zanurzenie mierzone automatycznie przez sensory lub wprowadzane ręcznie przez operatora Sensor prędkości statku prędkość i kierunek poruszania się jednostki najczęściej wyznaczana jest na podstawie danych pochodzących z systemów referencyjnych dużej dokładności istnieje jednak możliwość wykorzystania dodatkowych sensorów prędkości lub logów okrętowych
23 Sensory pomocnicze: Sensor głębokości akwenu najczęściej ręcznie wprowadzana przez operatora Sensory rejestrujące naprężania na urządzeniach cumowniczoładunkowych Czujniki spójności systemu ładunkowego zielonej linii
24 Pozycyjne systemy referencyjne Tradycyjne systemy nawigacyjne (GPS, Glonass, Loran C) nie spełniają wymagań stawianych systemom referencyjnym wykorzystywanym w systemach DP Najczęściej stosowane systemy: Mechaniczne Mikrofalowe Laserowe Różnicowe satelitarne Hydroakustyczne
 Obecnie wykorzystywany na")

25 Pozycyjne systemy referencyjne systemy mechaniczne Taut wire Stosowane od początku lat 60-tych XX wieku (pierwsze jednostki) Obecnie wykorzystywany na akwenach o głębokościach do 600m z dnem piaszczystym lub mulistym Stosowana przy operacjach, które wymagają, aby jednostka DP przez dłuższy czas pozostawała w stałej pozycji
26 Pozycyjne systemy referencyjne systemy mechaniczne Taut Wire Podział systemów: Podpowierzchniowe systemy burtowe o małym balaście LTW (Light Taut Wire) Systemy powierzchniowe STW (Surface Taut Wire) Podpowierzchniowe systemy denne opuszczane z dna statku lub pokładu roboczego platformy produkcyjnej MPTW (Moon Pool Taut Wire), WPTW (Work Pool Taut Wire)
 lub obciążnika opuszczonego na dno akwenu.")
27 Pozycyjne systemy referencyjne systemy mechaniczne Taut wire Zasada działania systemu Taut wireoparta jest na pomiarze kąta wychylenia linki, którą doczepia się do innej instalacji powierzchniowej (platformy, statku lub boi) lub obciążnika opuszczonego na dno akwenu. W skład systemu wchodzi hydraulicznie sterowany wysięgnik wraz z osprzętem, moduł pomiarowy wychylenia liny oraz część elektroniczna instalowana wewnątrz nadbudówki
 Szybkość i łatwość samodzielnego przygotowania do użycia Możliwość dokonywania napraw we")
28 Pozycyjne systemy referencyjne systemy mechaniczne Taut Wire Zalety: Wysoka dokładność na umiarkowanych głębokościach Niezawodność (pod warunkiem dokonywania regularnych przeglądów i prac konserwacyjnych) Szybkość i łatwość samodzielnego przygotowania do użycia Możliwość dokonywania napraw we własnym zakresie
29 Pozycyjne systemy referencyjne systemy mechaniczne Taut Wire Wady: Ograniczony zasięg roboczy ( w szczególności na płytkich akwenach) Podatność systemu na oddziaływanie pływów powodujących duże niedokładności) Dokładność systemu spada wraz ze wzrostem głębokości Ograniczona głębokość przy której można korzystać z systemu (około 600m) Ograniczona możliwość użycia na akwenach zalodzonych Możliwość wleczenia obciążnika dennego Możliwość spowodowania uszkodzeń w instalacjach dennych System zapewnia jedynie dane o informacji względnej Podatność na uszkodzenia mechaniczne Ograniczenie zasięgu przez obło statku

30 Pozycyjne systemy referencyjne systemy mikrofalowe Wykorzystywane od lat 70-tych XX wieku Najczęśćiej wykorzystywane systemy to: Artemis RADius RadaScan Miniranger Trispondeur
 lub Jedną jednostkę ABU i jeden radionadajnik Artemis")
31 Pozycyjne systemy referencyjne Artemis Stworzony w roku 1970 przez holenderską firmę Christiaan Huygens Laboratorium BV Konfiguracja systemu obejmuje: Dwie stacje nadawczo odbiorcze (jednostki podstawowe ABU Artemis Basic Unit) lub Jedną jednostkę ABU i jeden radionadajnik Artemis
32 Pozycyjne systemy referencyjne Artemis Jedna ze stacji ABU montowana jest na obiekcie stałym lub ruchomym i określana jest mianem stacji referencyjnej lub stacji stałej (FIX) druga stacja umieszczana jest na statku i określana jest mianem stacji ruchomej (MOB). Pomiar odległości dokonywany jest przez stację ruchomą (MOB), natomiast pomiar kąta przez stację referencyjną (FIX), umożliwia to uniknięcie błędów określenia zorientowania dziobu jednostki DP. Pomiar odległości wykonywany jest poprzez pomiar czasu propagacji i obliczenie drogi jaką musiał przebyć impuls. Pomiar kąta możliwy jest dzięki zastosowaniu spolaryzowanego sygnału, który przesłany do portów różnicujących pozwala na ciągłe utrzymywanie anteny prostopadle do kierunku odebranego sygnału.
33 Pozycyjne systemy referencyjne Artemis Zalety: Znaczny zasięg pracy (od 10m do 30km) Wysoka dokładność (±0,02 i ±1m) Możliwość geograficznego odniesienia danych dotyczących pozycji Dokładność i użyteczność w strefie 500m od stacji referencyjnej Wymóg tylko jednaj niezależnej stacji referencyjnej umieszczonej na obiekcie stałym lub ruchomym, względem którego określana ma być pozycja Niewielkich rozmiarów, przenośny panel obsługi
34 Pozycyjne systemy referencyjne Artemis Wady: Podatność na zakłócenia atmosferyczne, w szczególności opady deszczu i śniegu) Wymaga instalacji stacji referencyjnej Możliwość jednoczesnego określania pozycji obserwowanej jedynie dla jednej stacji referencyjnej Stacja referencyjna musi być poprawnie skalibrowana i skonfigurowana Niekompatybilność systemu z odbiornikami starszej generacji (MK III i MK IV) Konieczność korzystania z kilku stacji FIX dla pokrycia w sektorze 360 Mały pionowy kąt operacyjny uniemożliwia prowadzenie operacji w bliskiej odległości od stacji Możliwość interferencji z radarami pasma X

35 Pozycyjne systemy referencyjne RADius System uruchomiony 19 kwietnia 2004 przez firmę Kongsberg W skład systemu wchodzą: Transpondery zainstalowane na jednostkach offshorewzględem których określana ma być pozycja jednostki DP Radiolokacyjne urządzenia zapytujące, czyli tzw. interrogatory instalowane na jednostkach mobilnych DP Stacje robocze systemu zainstalowane na jednostkach offshorei DP, obejmujące kontrolery systemu wraz z procesorem operacyjnym oraz interfejsem użytkownika

36 Pozycyjne systemy referencyjne RADius System działa w oparciu o pomiar odległości pomiędzy interrogatoremi transponderem oraz kąta zawartego pomiędzy kierunkiem odniesienia i transponderem. Wyniki pomiarów oraz status systemu przedstawiane są na jednostce obrazowo-kontrolnej lub monitorze LCD. Do poprawnego działania systemu wystarcza jeden transponder, zwykle jednak w celu zwiększenia niezawodności systemu oraz polepszenia jego konfiguracji stosuje się większą ilość transponderów (od 3 do nawet kilkunastu)
37 Pozycyjne systemy referencyjne RADius Zalety: Wysoka dokładność Brak ruchomych części (małe koszty eksploatacyjne i konserwacyjne) Brak opłat za użytkowanie systemu Możliwość jednoczesnego korzystania z systemu przez wielu użytkowników Wysoka odporność na zakłócenie hydrometeorologiczne Wady: Do określenia pozycji w zasięgu stacji odbiorczej musi być zainstalowany przynajmniej jeden transponder przekaźnikowy Maksymalny zasięg pracy systemu ograniczony jest odległością około 1km od rozlokowanych transponderów systemu W strefie akwizycji i śledzenia możliwy jest dokładny pomiar odległości, pomiar kąta obarczony jest znacznym błędem
 i/lub innym obiekcie względem którego ma")
38 Pozycyjne systemy referencyjne RadaScan System RadaScan składa się z następujących komponentów: Anteny poszukująco-skanującej Kontrolera systemu, który obejmuje: Komputerową jednostkę obliczeniową PC wraz z oprogramowaniem Interfejs użytkownika Jednostkę kontrolno-informacyjną Jednego lub kilku transponderów systemowych umieszczonych na platformie (statku) i/lub innym obiekcie względem którego ma być określana pozycja
 lub innej konstrukcji offshore.")
39 Pozycyjne systemy referencyjne RadaScan Zasada działania systemu opiera się o wykorzystanie fal radiowych o modulowanej częstotliwości nadawanych przez radiolokacyjne urządzenia zapytujące i odbieranych przez transpondery zamontowane na platformie (statku) lub innej konstrukcji offshore. Sygnał odebrany przez transponder zostaje zmodyfikowany poprzez dodanie unikatowego kodu ID, zawierającego informacje o zmierzonej odległości i kącie względnym pomiędzy stacją nadawczą i transponderem. Sygnał zostaje następnie retransmitowany z powrotem do anteny odbiorczej, zainstalowanej na jednostce DP

40 Pozycyjne systemy referencyjne RadaScan Zalety: Wysoka dokładność 0,25m i 0,03 Użyteczność w strefie od 10m do 1000m Małe koszty eksploatacyjne i konserwacyjne Brak opłat za użytkowanie systemu Możliwość korzystania z systemu jednocześnie przez wielu użytkowników Odporność na działanie warunków hydrometeorologicznych

41 Pozycyjne systemy referencyjne RadaScan Wady: Do określenia pozycji w zasięgu stacji odbiorczej musi być zainstalowany przynajmniej jeden transponder przekaźnikowy Maksymalny zasięg pracy systemu ograniczony jest odległością około 1km od rozlokowanych transponderów systemu W strefie akwizycji i śledzenia możliwy jest dokładny pomiar odległości, pomiar kąta obarczony jest znacznym błędem Brak możliwości geograficznego odniesienia pozycji
42 Pozycyjne systemy referencyjne systemy laserowe W referencyjnych systemach laserowych pomiar odległości możliwy jest poprzez pośredni pomiar czasu jaki upłynie od momentu wyemitowania impulsu laserowego z anteny nadawczoodbiorczej w kierunku celu, aż do jego powrotu po odbiciu od reflektora pasywnego odbiorczej stacji referencyjnej i obliczeniu na tej podstawie połowy drogi, jaką w tym czasie przebył impuls. Pomiar kąta względem wzdłużnej osi symetrii statku i/lub północy rzeczywistej możliwy jest natomiast poprzez zastosowanie czujników zorientowania obrotowej anteny nadawczo-odbiorczej


43 Pozycyjne systemy referencyjne Fanbeam Na system Fanbeam składają się następujące komponenty: Laserowa antena przeszukująca Jednostka sterująca Jednostka obrazowo-kontrolna Reflektor

44 Pozycyjne systemy referencyjne Fanbeam Zalety: Wysoka dokładność (±0,2m i ±0,02 ) Łatwość obsługi i szybkość instalacji (na platformie wystarczy wystawić reflektor) Stacja referencyjna nie wymaga przeprowadzania specjalistycznych czynności konserwacyjno-operacyjnych Reflektor jako urządzenie pasywne nie wymaga zasilania Niskie koszty zakupu, instalacji oraz eksploatacji systemu Niskie koszty konserwacyjne
45 Pozycyjne systemy referencyjne Fanbeam Wady: Duża podatność na warunki widzialności Maksymalny zasięg do 2km od stacji referencyjnej, zwykle zasięg ten jest ograniczony do odległości około kilkuset metrów Zakłócenia pracy soczewek przez opady (deszcz, śnieg) kondensację wody i soli morskiej oraz jasne światło w pobliżu soczewek i/lub reflektora Zakłócenia pracy wynikające z odbić od innych obiektów stałych Brak możliwości geograficznego odniesienia danych dotyczących pozycji System nie mierzy odległości horyzontalnej, a jedynie odległość od anteny do reflektora, nieprawidłowe przeliczenie końcowych wyników może prowadzić do dużych błędów

46 Pozycyjne systemy referencyjne CyScan W skład systemy CyScan wchodzą: Laserowa antena przeszukująca, zamontowana na trzyosiowym układzie żyroskopowym z układem kompensacji przechyłów wzdłużnych i bocznych Jednostka sterująca z kontrolerem systemu Jednostka obrazowo-kontrolna Reflektor lub reflektory


47 Pozycyjne systemy referencyjne CyScan

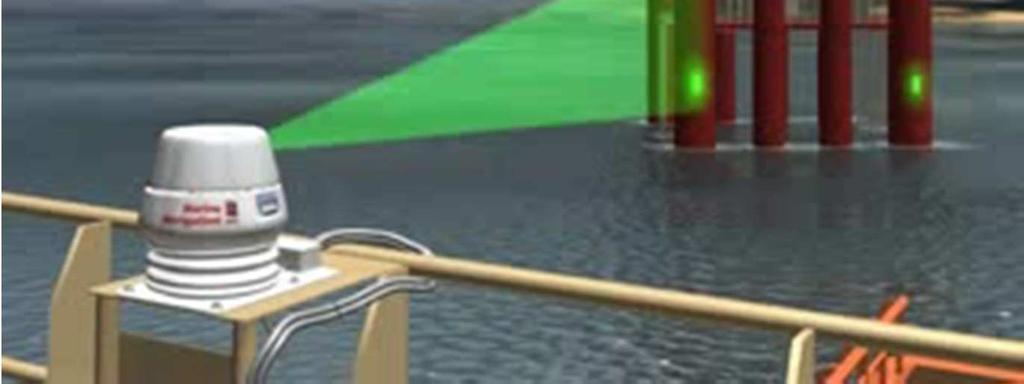
48 Pozycyjne systemy referencyjne CyScan
49 Pozycyjne systemy referencyjne CyScan Zalety: Wysoka dokładność pomiarów (do 0,5% zakresu pracy i zwykle nie więcej niż 0,2m oraz 0,03 Możliwość pracy przy wzburzonym morzu oraz w zakresie dużych wartości temperatur Niski koszt zakupu, instalacji oraz eksploatacji systemu
50 Pozycyjne systemy referencyjne CyScan Wady: Duża podatność na warunki widzialności Maksymalny zasięg systemu do 1,5 km od stacji referencyjnej, zwykle jednak zasięg ten jest ograniczony do odległości około kilkuset metrów od reflektora Zakłócenia pracy soczewek przez opady (deszcz, śnieg) kondensację wody i soli morskiej oraz jasne światło w pobliżu soczewek i/lub reflektora Brak możliwości geograficznego odniesienia danych dotyczących pozycji System nie mierzy odległości horyzontalnej, a jedynie odległość od anteny do reflektora, nieprawidłowe przeliczenie końcowych wyników może prowadzić do dużych błędów

51 Pozycyjne systemy referencyjne Systemy hydroakustyczne Na morskich jednostkach handlowych po raz pierwszy wykorzystane w 1968r. Pozycja określana może być w odniesieniu do pojedynczego transpondera i/lub kilku transponderów jednocześnie
52 Pozycyjne systemy referencyjne Systemy hydroakustyczne W skład systemów hydroakustycznych wchodzą: Stacja operatora Urządzenie dekodujące Przetwornik (lub kilka przetworników) aktywnych lub pasywnych Nadajnika lub transpondera lub układu kilku nadajników i kilku transponderów Na jednostkach DP spotyka się systemy: HPR (Hydroacoustic Positioning Reference System) HiPAP(High Precision Acoustic Positioning)

53 Pozycyjne systemy referencyjne Systemy hydroakustyczne Stacja operatora komputer wyposażony w odpowiednie oprogramowanie i monitor Urządzenia dekodujące odpowiadają za dekodowanie sygnałów z przetwornika oraz za obliczenie pozycji przetwornika względem transpondera dennego, poprzez pomiar czasu przejścia sygnału i/lub poprzez pomiar różnicy faz i/lub opóźnienia sygnałów odbieranych przez przetworniki Przetworniki najczęściej umieszczana są w kadłubie statku


54 Pozycyjne systemy referencyjne Systemy hydroakustyczne Przetworniki najczęściej umieszczana są w kadłubie statku, odpowiadają za przetwarzanie sygnałów elektrycznych na akustyczne oraz ich wyemitowanie w kierunku transponderów dennych. Przetwarzają również sygnały akustyczne na sygnały elektryczne i przesyłają je do urządzeń dekodujących

55 Pozycyjne systemy referencyjne Systemy hydroakustyczne Nadajniki i transpondery umieszczone zwykle na dnie morskim w miejscu o znanej pozycji i odpowiadają za nadawanie sygnałów akustycznych i/lub danych telemetrycznych oraz retransmisję odebranych sygnałów w kierunku przetworników burtowych.


56 Pozycyjne systemy referencyjne Systemy satelitarne II semestr DGPS DGLONASS GALILEO
57 DP - podsumowanie
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW.
 3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW. Przy rozchodzeniu się fal dźwiękowych może dochodzić do częściowego lub całkowitego odbicia oraz przenikania fali przez granice ośrodków. Przeszkody napotykane
3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW. Przy rozchodzeniu się fal dźwiękowych może dochodzić do częściowego lub całkowitego odbicia oraz przenikania fali przez granice ośrodków. Przeszkody napotykane
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Polskie Towarzystwo Medycyny i Techniki Hiperbarycznej 67
 Polish Hyperbaric Research M. Kozłowska MOŻLIWOŚCI MONITOROWANIA RUCHU OBIEKTÓW PODWODNYCH W HYDROGRAFII MORSKIEJ Pozycjonowanie, a w konsekwencji monitorowanie ruchu obiektów na powierzchni Ziemi obecnie
Polish Hyperbaric Research M. Kozłowska MOŻLIWOŚCI MONITOROWANIA RUCHU OBIEKTÓW PODWODNYCH W HYDROGRAFII MORSKIEJ Pozycjonowanie, a w konsekwencji monitorowanie ruchu obiektów na powierzchni Ziemi obecnie
Temat pracy dyplomowej Promotor Dyplomant CENTRUM INŻYNIERII RUCHU MORSKIEGO. prof. dr hab. inż. kpt.ż.w. Stanisław Gucma.
 kierunek: Nawigacja, : Transport morski, w roku akademickim 2012/2013, Temat dyplomowej Promotor Dyplomant otrzymania 1. Nawigacja / TM 2. Nawigacja / TM dokładności pozycji statku określonej przy wykorzystaniu
kierunek: Nawigacja, : Transport morski, w roku akademickim 2012/2013, Temat dyplomowej Promotor Dyplomant otrzymania 1. Nawigacja / TM 2. Nawigacja / TM dokładności pozycji statku określonej przy wykorzystaniu
IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA
 IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA 1 CEL IDENTYFIKACJI ZATOPIONYCH JEDNOSTEK - Zagrożenie
IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA 1 CEL IDENTYFIKACJI ZATOPIONYCH JEDNOSTEK - Zagrożenie
Symulacyjne badanie wpływu systemu PNDS na bezpieczeństwo i efektywność manewrów
 dr inż. st. of. pokł. Stefan Jankowski Symulacyjne badanie wpływu systemu PNDS na bezpieczeństwo i efektywność manewrów słowa kluczowe: systemy pilotowe, systemy dokingowe, dokładność pozycjonowania, prezentacja
dr inż. st. of. pokł. Stefan Jankowski Symulacyjne badanie wpływu systemu PNDS na bezpieczeństwo i efektywność manewrów słowa kluczowe: systemy pilotowe, systemy dokingowe, dokładność pozycjonowania, prezentacja
Mechatronika i inteligentne systemy produkcyjne. Sensory (czujniki)
") Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
RÓWNIARKA. System wskaźnikowy bez automatyki. Opis: System wskaźnikowy bez automatyki pozwala na odczyt aktualnego pochylenia lemiesza
 System wskaźnikowy bez automatyki System wskaźnikowy bez automatyki pozwala na odczyt aktualnego pochylenia lemiesza System podstawowy automatyczny pochyleniem lemiesza System podstawowy automatyczny z
System wskaźnikowy bez automatyki System wskaźnikowy bez automatyki pozwala na odczyt aktualnego pochylenia lemiesza System podstawowy automatyczny pochyleniem lemiesza System podstawowy automatyczny z
BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO
 Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU.
 SPIS TREŚCI Przedmowa ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU. 1.1. Szerokość i długość geograficzna. Różnica długości. Różnica szerokości. 1.1.1.
SPIS TREŚCI Przedmowa ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU. 1.1. Szerokość i długość geograficzna. Różnica długości. Różnica szerokości. 1.1.1.
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
 Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej Katedra Systemów Elektroniki Morskiej Stacja Badań Hydroakustycznych Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej Katedra Systemów Elektroniki Morskiej Stacja Badań Hydroakustycznych Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne
 Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Franciszek
Literatura: Maciej Gucma, Jakub Montewka, Antoni Zieziula Urządzenia nawigacji technicznej Krajczyński Edward Urządzenia elektronawigacyjne Krajczyński Edward Urządzenia nawigacji technicznej Franciszek
2.2 Opis części programowej
 2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA
 PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA 2010 Publikacje P (Przepisowe) wydawane przez Polski Rejestr Statków są uzupełnieniem lub rozszerzeniem Przepisów i stanowią
PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA 2010 Publikacje P (Przepisowe) wydawane przez Polski Rejestr Statków są uzupełnieniem lub rozszerzeniem Przepisów i stanowią
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Opis przedmiotu zamówienia
 Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia
 IRM wykład 2 Parametry Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia maksymalnego statku /T. Wymiary
IRM wykład 2 Parametry Wymiary akwenu w płaszczyźnie pionowej bezpieczna głębokość podawana zazwyczaj w postaci stosunku minimalnej rezerwy wody pod kilem do zanurzenia maksymalnego statku /T. Wymiary
MODYFIKACJA ORAZ ZMIANA TERMINU SKŁADANIA I OTWARCIA OFERT
 UL. TAMA POMORZAŃSKA 13A 70-030 SZCZECIN Nr 2520/1/2015 Nr K-20/1/2015 SEKRETARIAT: 91-44 -11-200 Fax: 91-44 -11-300 Centrum Operacyjne: 91-44 -11-301 e-mail: sekretariat@szczecin.rzgw.gov.pl www.szczecin.rzgw.gov.pl
UL. TAMA POMORZAŃSKA 13A 70-030 SZCZECIN Nr 2520/1/2015 Nr K-20/1/2015 SEKRETARIAT: 91-44 -11-200 Fax: 91-44 -11-300 Centrum Operacyjne: 91-44 -11-301 e-mail: sekretariat@szczecin.rzgw.gov.pl www.szczecin.rzgw.gov.pl
Naziemne systemy nawigacyjne. Wykorzystywane w nawigacji
 Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT. Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014
 Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Termometr internetowy
 BYDGOSZCZ Termometr internetowy Czyli mała chmura IoT P.K. 2017 Spis treści Wersje dokumentu... 2 Opis i zasada działania... 3 Budowa termometru... 4 Dioda RGB LED... 5 Instalacja i pierwsze uruchomienie...
BYDGOSZCZ Termometr internetowy Czyli mała chmura IoT P.K. 2017 Spis treści Wersje dokumentu... 2 Opis i zasada działania... 3 Budowa termometru... 4 Dioda RGB LED... 5 Instalacja i pierwsze uruchomienie...
System monitoringu ze zdalnym odczytem radiowym, oparty na technologii GSM. Dane techniczne.
 System monitoringu ze zdalnym odczytem radiowym, oparty na technologii GSM. Dane techniczne. Charakterystyka. Monitoring poziomu gazu w zbiornikach LPG, zużycia gazu, wody lub energii cieplnej). Zdalny
System monitoringu ze zdalnym odczytem radiowym, oparty na technologii GSM. Dane techniczne. Charakterystyka. Monitoring poziomu gazu w zbiornikach LPG, zużycia gazu, wody lub energii cieplnej). Zdalny
rh-t1x1 Bateryjny moduł pomiaru temperatury i jasności systemu F&Home RADIO.
 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-t1x1 Bateryjny moduł pomiaru temperatury i jasności systemu F&Home RADIO. 95-00 Pabianice, ul. Konstantynowska
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-t1x1 Bateryjny moduł pomiaru temperatury i jasności systemu F&Home RADIO. 95-00 Pabianice, ul. Konstantynowska
Politechnika Gdańska
 Politechnika Gdańska Wydział Mechaniczny Katedra Energetyki i Aparatury Przemysłowej Automatyka chłodnicza i klimatyzacyjna TEMAT: Systemy sterowania i monitoringu obiektów chłodniczych na przykładzie
Politechnika Gdańska Wydział Mechaniczny Katedra Energetyki i Aparatury Przemysłowej Automatyka chłodnicza i klimatyzacyjna TEMAT: Systemy sterowania i monitoringu obiektów chłodniczych na przykładzie
Podstawy Nawigacji. Kierunki. Jednostki
 Podstawy Nawigacji Kierunki Jednostki Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje,
Podstawy Nawigacji Kierunki Jednostki Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje,
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Na podstawie: Albert Lozano-Nieto: RFID Design Fundamentals and Applications, CRC Press, Taylor & Francis Group, London New York, 2011 RFID RadioFrequency
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Na podstawie: Albert Lozano-Nieto: RFID Design Fundamentals and Applications, CRC Press, Taylor & Francis Group, London New York, 2011 RFID RadioFrequency
ZESZYTY NAUKOWE NR 6(78) AKADEMII MORSKIEJ W SZCZECINIE
 AKADEMII MORSKIEJ W SZCZECINIE") ISSN 1733-8670 ZESZYTY NAUKOWE NR 6(78) AKADEMII MORSKIEJ W SZCZECINIE Stefan Jankowski I N Ż Y N I E R I A R U C H U M O R S K I E G O 2 00 5 Błąd kursu w pilotowych systemach nawigacyjnych: przenośnym
ISSN 1733-8670 ZESZYTY NAUKOWE NR 6(78) AKADEMII MORSKIEJ W SZCZECINIE Stefan Jankowski I N Ż Y N I E R I A R U C H U M O R S K I E G O 2 00 5 Błąd kursu w pilotowych systemach nawigacyjnych: przenośnym
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
Zintegrowany system wizualizacji parametrów nawigacyjnych w PNDS
 dr inż. kpt. ż.w. Andrzej Bąk Zintegrowany system wizualizacji parametrów nawigacyjnych w PNDS słowa kluczowe: PNDS, ENC, ECS, wizualizacja, sensory laserowe Artykuł opisuje sposób realizacji procesu wizualizacji
dr inż. kpt. ż.w. Andrzej Bąk Zintegrowany system wizualizacji parametrów nawigacyjnych w PNDS słowa kluczowe: PNDS, ENC, ECS, wizualizacja, sensory laserowe Artykuł opisuje sposób realizacji procesu wizualizacji
Badania charakterystyki wyrobu i metody badawcze. Kompatybilność elektromagnetyczna Odporność uzbrojenia na wyładowania elektrostatyczne.
 Zakres akredytacji OiB dla Laboratorium Badań Kompatybilności Elektromagnetycznej i Pomiarów Pól Elektromagnetycznych (LBEMC) Nr 27/MON/2014 wydany przez Wojskowe Centrum Normalizacji, Jakości i Kodyfikacji
Zakres akredytacji OiB dla Laboratorium Badań Kompatybilności Elektromagnetycznej i Pomiarów Pól Elektromagnetycznych (LBEMC) Nr 27/MON/2014 wydany przez Wojskowe Centrum Normalizacji, Jakości i Kodyfikacji
ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
 Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Katarzyna Żelazny*, Tadeusz Szelangiewicz* ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
Górnictwo i Geoinżynieria Rok 35 Zeszyt 4/1 2011 Katarzyna Żelazny*, Tadeusz Szelangiewicz* ODKSZTAŁCENIA I ZMIANY POŁOŻENIA PIONOWEGO RUROCIĄGU PODCZAS WYDOBYWANIA POLIMETALICZNYCH KONKRECJI Z DNA OCEANU
Dynatel 2573E-iD, Dynatel 2573E Uniwersalny lokalizator podziemnej infrastruktury, uszkodzeń powłoki kabli i rur oraz znaczników EMS i EMS-iD
 Lokalizator Dynatel 2573E-iD, Dynatel 2573E Opis techniczny Dynatel 2573E-iD zestaw oraz panel sterowania z trybem wizualizacji trasy kabla Odbiornik Częstotliwości pracy odbiornika od 50hZ do 133kHz Częstotliwości
Lokalizator Dynatel 2573E-iD, Dynatel 2573E Opis techniczny Dynatel 2573E-iD zestaw oraz panel sterowania z trybem wizualizacji trasy kabla Odbiornik Częstotliwości pracy odbiornika od 50hZ do 133kHz Częstotliwości
AKADEMIA MORSKA. w Gdyni. Wydział Elektryczny MORSKA PRAKTYKA EKSPLOATACYJNA. Specjalność: Elektronika Morska
 AKADEMIA MORSKA w Gdyni Wydział Elektryczny MORSKA PRAKTYKA EKSPLOATACYJNA PROGRAM I WYMAGANIA Specjalność: Elektronika Morska Gdynia 2012 Nazwisko... Family name Imiona... Given name Nazwa statku... ship
AKADEMIA MORSKA w Gdyni Wydział Elektryczny MORSKA PRAKTYKA EKSPLOATACYJNA PROGRAM I WYMAGANIA Specjalność: Elektronika Morska Gdynia 2012 Nazwisko... Family name Imiona... Given name Nazwa statku... ship
AGENDA. Site survey - pomiary i projektowanie sieci bezprzewodowych. Tomasz Furmańczak UpGreat Systemy Komputerowe Sp. z o.o.
 AGENDA Site survey - pomiary i projektowanie sieci bezprzewodowych Tomasz Furmańczak UpGreat Systemy Komputerowe Sp. z o.o. Zagadnienia projektowe dla sieci WLAN skomplikowane środowisko dla propagacji
AGENDA Site survey - pomiary i projektowanie sieci bezprzewodowych Tomasz Furmańczak UpGreat Systemy Komputerowe Sp. z o.o. Zagadnienia projektowe dla sieci WLAN skomplikowane środowisko dla propagacji
TELEMETRIA. [Kontrola ochrony oddychania wspierana systemem radiowym z serią alpha]
![TELEMETRIA. [Kontrola ochrony oddychania wspierana systemem radiowym z serią alpha]](/thumbs/61/45505247.jpg "TELEMETRIA. [Kontrola ochrony oddychania wspierana systemem radiowym z serią alpha]") TELEMETRIA [Kontrola ochrony oddychania wspierana systemem radiowym z serią alpha] Czym jest system telemetryczny? Telemetria: pomiar parametrów pracy na odległość Seria alpha - modułowy system kontroli
TELEMETRIA [Kontrola ochrony oddychania wspierana systemem radiowym z serią alpha] Czym jest system telemetryczny? Telemetria: pomiar parametrów pracy na odległość Seria alpha - modułowy system kontroli
THP-100 su Obsługa oprogramowania oraz instrukcja wzorcowania
 THP-100 su Obsługa oprogramowania oraz instrukcja wzorcowania Spis treści Konfiguracja programu...3 Odczyt pomiarów...4 Wzorcowanie...6 Edycja ręczna...7 Edycja automatyczna...7 Konfiguracja...10 Konfiguracja
THP-100 su Obsługa oprogramowania oraz instrukcja wzorcowania Spis treści Konfiguracja programu...3 Odczyt pomiarów...4 Wzorcowanie...6 Edycja ręczna...7 Edycja automatyczna...7 Konfiguracja...10 Konfiguracja
Mobilny Rejestrator Zdarzeń ECS jako narzędzie w zarządzaniu nowoczesną flotą
 Mobilny Rejestrator Zdarzeń ECS jako narzędzie w zarządzaniu nowoczesną flotą Rejestracja pracy maszyn i pojazdów ECS (EQUIPMENT CONTROL SYSTEM) jest elektronicznym systemem kontroli dostępu i zabezpieczenia
Mobilny Rejestrator Zdarzeń ECS jako narzędzie w zarządzaniu nowoczesną flotą Rejestracja pracy maszyn i pojazdów ECS (EQUIPMENT CONTROL SYSTEM) jest elektronicznym systemem kontroli dostępu i zabezpieczenia
Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych
 Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych Okólnik IMO MSC 645 Guidelines for Vessels with Dynamic Positioning Systems Statek pozycjonowany dynamicznie (statek DP)
Literatura: Grzegorz Rutkowski Eksploatacja statków dynamicznie pozycjonowanych Okólnik IMO MSC 645 Guidelines for Vessels with Dynamic Positioning Systems Statek pozycjonowany dynamicznie (statek DP)
Doświadczenia w eksploatacji gazomierzy ultradźwiękowych
 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych Daniel Wysokiński Mateusz Turkowski Rogów 18-20 września 2013 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych 1 Gazomierze ultradźwiękowe
Doświadczenia w eksploatacji gazomierzy ultradźwiękowych Daniel Wysokiński Mateusz Turkowski Rogów 18-20 września 2013 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych 1 Gazomierze ultradźwiękowe
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
AKADEMIA MORSKA. w Gdyni. Wydział Elektryczny MORSKA PRAKTYKA EKSPLOATACYJNA. Specjalność: Elektronika Morska
 AKADEMIA MORSKA w Gdyni Wydział Elektryczny MORSKA PRAKTYKA EKSPLOATACYJNA PROGRAM I WYMAGANIA Specjalność: Elektronika Morska Gdynia 2014 Nazwisko... Family name Imiona... Given name Nazwa statku... ship
AKADEMIA MORSKA w Gdyni Wydział Elektryczny MORSKA PRAKTYKA EKSPLOATACYJNA PROGRAM I WYMAGANIA Specjalność: Elektronika Morska Gdynia 2014 Nazwisko... Family name Imiona... Given name Nazwa statku... ship
PL B BUP 12/13. ANDRZEJ ŚWIERCZ, Warszawa, PL JAN HOLNICKI-SZULC, Warszawa, PL PRZEMYSŁAW KOŁAKOWSKI, Nieporęt, PL
 PL 222132 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222132 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 397310 (22) Data zgłoszenia: 09.12.2011 (51) Int.Cl.
PL 222132 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222132 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 397310 (22) Data zgłoszenia: 09.12.2011 (51) Int.Cl.
Zakład Teorii Maszyn i Układów Mechatronicznych. LABORATORIUM Podstaw Mechatroniki. Sensory odległości
 Zakład Teorii Maszyn i Układów Mechatronicznych LABORATORIUM Podstaw Mechatroniki Sensory odległości Podstawy Mechatroniki Nazwa Stanowiska: Stanowisko do badania sensorów odległości Widok Stanowiska:
Zakład Teorii Maszyn i Układów Mechatronicznych LABORATORIUM Podstaw Mechatroniki Sensory odległości Podstawy Mechatroniki Nazwa Stanowiska: Stanowisko do badania sensorów odległości Widok Stanowiska:
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Badania elementów i zespołów maszyn laboratorium (MMM4035L) Zastosowanie systemu nawigacyjnego w pomiarach geometrii elementów maszyn. Ćwiczenie 22.
 Zastosowanie systemu nawigacyjnego w pomiarach geometrii elementów maszyn. Ćwiczenie 22.") Badania elementów i zespołów maszyn laboratorium (MMM4035L) Ćwiczenie 22. Zastosowanie systemu nawigacyjnego w pomiarach geometrii Przygotowanie: Ewelina Świątek-Najwer Wstęp teoretyczny: Rodzaje systemów
Badania elementów i zespołów maszyn laboratorium (MMM4035L) Ćwiczenie 22. Zastosowanie systemu nawigacyjnego w pomiarach geometrii Przygotowanie: Ewelina Świątek-Najwer Wstęp teoretyczny: Rodzaje systemów
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Zagadnienia egzaminacyjne ELEKTRONIKA I TELEKOMUNIKACJA studia rozpoczynające się przed r.
 (EAE) Aparatura elektroniczna 1. Podstawowe statyczne i dynamiczne właściwości czujników. 2. Prawa gazów doskonałych i ich zastosowania w pomiarze ciśnienia. 3. Jakie właściwości mikrokontrolerów rodziny
(EAE) Aparatura elektroniczna 1. Podstawowe statyczne i dynamiczne właściwości czujników. 2. Prawa gazów doskonałych i ich zastosowania w pomiarze ciśnienia. 3. Jakie właściwości mikrokontrolerów rodziny
Rozwój prac projektowych przemysłowego systemu wydobywania konkrecji z dna Oceanu Spokojnego poprzez realizację projektów badawczo-rozwojowych
 Rozwój prac projektowych przemysłowego systemu wydobywania konkrecji z dna Oceanu Spokojnego poprzez realizację projektów badawczo-rozwojowych prof. dr hab. inż. Tadeusz Szelangiewicz przygotowanie prezentacji:
Rozwój prac projektowych przemysłowego systemu wydobywania konkrecji z dna Oceanu Spokojnego poprzez realizację projektów badawczo-rozwojowych prof. dr hab. inż. Tadeusz Szelangiewicz przygotowanie prezentacji:
lp tematy pracy promotor dyplomant data otrzymania tematu uwagi ZAKŁAD URZĄDZEŃ NAWIGACYJNYCH
 Tematy prac dyplomowych inżynierskich dla studentów niestacjonarnych prowadzone przez nauczycieli akademickich Instytutu Inżynierii Ruchu Morskiego na rok akademicki 2008/2009 lp tematy pracy promotor
Tematy prac dyplomowych inżynierskich dla studentów niestacjonarnych prowadzone przez nauczycieli akademickich Instytutu Inżynierii Ruchu Morskiego na rok akademicki 2008/2009 lp tematy pracy promotor
rh-t1x1es AC LR Moduł pomiaru temperatury i jasności z zewnętrznym czujnikiem temperatury i jasności systemu F&Home RADIO.
 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-t1x1es AC LR Moduł pomiaru temperatury i jasności z zewnętrznym czujnikiem temperatury i jasności systemu
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-t1x1es AC LR Moduł pomiaru temperatury i jasności z zewnętrznym czujnikiem temperatury i jasności systemu
(54) (13)B1 PL B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)165054
 (13)B1 PL B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)165054") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)165054 (13)B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 289981 (22) Data zgłoszenia: 19.04.1991 (51) IntCl5: B63B 39/14 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)165054 (13)B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 289981 (22) Data zgłoszenia: 19.04.1991 (51) IntCl5: B63B 39/14 (54)
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Laboratoria badawcze
 rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
SYSTEM ARANET KATALOG PRODUKTÓW
 SYSTEM ARANET KATALOG PRODUKTÓW 1. Opis systemu Aranet to system monitorowania parametrów środowiskowych. Urządzenia wchodzące jego skład mogą mierzyć następujące wielkości: Temperatura Wilgotność względna
SYSTEM ARANET KATALOG PRODUKTÓW 1. Opis systemu Aranet to system monitorowania parametrów środowiskowych. Urządzenia wchodzące jego skład mogą mierzyć następujące wielkości: Temperatura Wilgotność względna
Procedura techniczna wyznaczania poziomu mocy akustycznej źródeł ultradźwiękowych
 Procedura techniczna wyznaczania poziomu mocy akustycznej źródeł ultradźwiękowych w oparciu o pomiary poziomu ciśnienia akustycznego w punktach pomiarowych lub liniach omiatania na półkulistej powierzchni
Procedura techniczna wyznaczania poziomu mocy akustycznej źródeł ultradźwiękowych w oparciu o pomiary poziomu ciśnienia akustycznego w punktach pomiarowych lub liniach omiatania na półkulistej powierzchni
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Warszawa, dnia 25 stycznia 2019 r. Poz. 151
 Warszawa, dnia 25 stycznia 2019 r. Poz. 151 ROZPORZĄDZENIE MINISTRA PRZEDSIĘBIORCZOŚCI I TECHNOLOGII 1) z dnia 10 stycznia 2019 r. zmieniające rozporządzenie w sprawie wymagań, którym powinny odpowiadać
Warszawa, dnia 25 stycznia 2019 r. Poz. 151 ROZPORZĄDZENIE MINISTRA PRZEDSIĘBIORCZOŚCI I TECHNOLOGII 1) z dnia 10 stycznia 2019 r. zmieniające rozporządzenie w sprawie wymagań, którym powinny odpowiadać
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Badanie czujników odległości Laboratorium Mechatroniki i Robotyki
 Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Badanie czujników odległości Laboratorium Mechatroniki i Robotyki Wrocław 2017 1. Cel ćwiczenia Celem ćwiczenia jest poznanie zasady działania
Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Badanie czujników odległości Laboratorium Mechatroniki i Robotyki Wrocław 2017 1. Cel ćwiczenia Celem ćwiczenia jest poznanie zasady działania
Formułowanie wymagań dotyczących wyposażenia bezpieczeństwa wykorzystującego technikę RFID
 Formułowanie wymagań dotyczących wyposażenia bezpieczeństwa wykorzystującego technikę RFID Tomasz Strawiński Centralny Instytut Ochrony Pracy Państwowy Instytut Badawczy Tematyka Struktura urządzenia ochronnego
Formułowanie wymagań dotyczących wyposażenia bezpieczeństwa wykorzystującego technikę RFID Tomasz Strawiński Centralny Instytut Ochrony Pracy Państwowy Instytut Badawczy Tematyka Struktura urządzenia ochronnego
Postęp w rozwoju wodomierzy domowych DN15-40
 Postęp w rozwoju wodomierzy domowych DN15-40 Technologia pomiaru zużycia wody Część 2 - Wodomierze statyczne Piotr Lewandowski, Sensus Polska WODOMIERZE STATYCZNE 2 dominujące technologie w krajach UE
Postęp w rozwoju wodomierzy domowych DN15-40 Technologia pomiaru zużycia wody Część 2 - Wodomierze statyczne Piotr Lewandowski, Sensus Polska WODOMIERZE STATYCZNE 2 dominujące technologie w krajach UE
Konfiguracja parametrów pozycjonowania GPS 09.05.2008 1/5
 Konfiguracja parametrów pozycjonowania GPS 09.05.2008 1/5 Format złożonego polecenia konfigurującego system pozycjonowania GPS SPY-DOG SAT ProSafe-Flota -KGPS A a B b C c D d E e F f G g H h I i J j K
Konfiguracja parametrów pozycjonowania GPS 09.05.2008 1/5 Format złożonego polecenia konfigurującego system pozycjonowania GPS SPY-DOG SAT ProSafe-Flota -KGPS A a B b C c D d E e F f G g H h I i J j K
07 - Zawory i elektrozawory. - Podstawowe zasady, schematy działania - Krzywe natężenia przepływu
 - Zawory i elektrozawory - Podstawowe zasady, schematy działania - Krzywe natężenia przepływu INFORMACJE OGÓLNE W układach pneumatycznych zawór jest elementem, który kieruje sprężonym powietrzem, zmieniając
- Zawory i elektrozawory - Podstawowe zasady, schematy działania - Krzywe natężenia przepływu INFORMACJE OGÓLNE W układach pneumatycznych zawór jest elementem, który kieruje sprężonym powietrzem, zmieniając
Toromierz Laserowy LASERTOR XTL 2
 Toromierz Laserowy LASERTOR XTL 2 KATOWICE Marzec 2005 TOROMIERZ LASEROWY LASERTOR XTL 2 Toromierz laserowy LASERTOR XTL 2, firmy PROVENTUS Sp. z o.o. jest najnowszym urządzeniem pomiarowym, służącym do
Toromierz Laserowy LASERTOR XTL 2 KATOWICE Marzec 2005 TOROMIERZ LASEROWY LASERTOR XTL 2 Toromierz laserowy LASERTOR XTL 2, firmy PROVENTUS Sp. z o.o. jest najnowszym urządzeniem pomiarowym, służącym do
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Zastosowania wielofunkcyjnej karty pomiarowej Data wykonania: 06.03.08 Data oddania: 19.03.08 Celem ćwiczenia było poznanie
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Zastosowania wielofunkcyjnej karty pomiarowej Data wykonania: 06.03.08 Data oddania: 19.03.08 Celem ćwiczenia było poznanie
REGULATORY NAPIĘCIA TRANSFORMATORÓW Z PODOBCIĄŻEIOWYM PRZEŁĄCZNIKIEM ZACZEPÓW - REG SYS
 REGULATORY NAPIĘCIA TRANSFORMATORÓW Z PODOBCIĄŻEIOWYM PRZEŁĄCZNIKIEM ZACZEPÓW REG SYS Cele i możliwości: Budowa inteligentnych rozwiązań do pomiarów, kontroli i monitoringu parametrów energii elektrycznej
REGULATORY NAPIĘCIA TRANSFORMATORÓW Z PODOBCIĄŻEIOWYM PRZEŁĄCZNIKIEM ZACZEPÓW REG SYS Cele i możliwości: Budowa inteligentnych rozwiązań do pomiarów, kontroli i monitoringu parametrów energii elektrycznej
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Parametry techniczno - eksploatacyjne radarów Szczecin 2008 TEMAT: Parametry techniczno - eksploatacyjne
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Parametry techniczno - eksploatacyjne radarów Szczecin 2008 TEMAT: Parametry techniczno - eksploatacyjne
1 DYNAMICZNA REDUKCJA MOCY W FALOWNIKACH FRONIUS SNAPINVERTER
 1 DYNAMICZNA REDUKCJA MOCY W FALOWNIKACH FRONIUS SNAPINVERTER 1.1 Wprowadzenie Jeśli zadane są limity wprowadzania energii do sieci OSD (np. max. 70% wartości kwp lub maks. 5 kw), aby zmniejszanie mocy
1 DYNAMICZNA REDUKCJA MOCY W FALOWNIKACH FRONIUS SNAPINVERTER 1.1 Wprowadzenie Jeśli zadane są limity wprowadzania energii do sieci OSD (np. max. 70% wartości kwp lub maks. 5 kw), aby zmniejszanie mocy
Samochodowe systemy kontrolno dyspozytorskie GPS
 Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury. Czujniki stacjonarne.
 Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Szczegółowy opis parametrów dostępnych w sterownikach serii EKC 201/301 (wersja oprogramowania 2.2)
") Szczegółowy opis parametrów dostępnych w sterownikach serii EKC 201/301 (wersja oprogramowania 2.2) TERMOSTAT - Nastawa Nastawa temperatury Uwaga: Wybrana nastawa temperatury może zawierać się tylko w
Szczegółowy opis parametrów dostępnych w sterownikach serii EKC 201/301 (wersja oprogramowania 2.2) TERMOSTAT - Nastawa Nastawa temperatury Uwaga: Wybrana nastawa temperatury może zawierać się tylko w
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
BADANIE ANTENY TUBOWEJ I ANTENY SOCZEWKOWEJ
 WOJSKOWA AKADEMIA TECHNICZNA WYDZIAŁ ELEKTRONIKI INSTYTUT TELEKOMUNIKACJI ZAKŁAD RADIOKOMUNIKACJI L a b o r a t o r i u m A n t e n INSTRUKCJA LABORATORYJNA ĆWICZENIE NR 15: BADANIE ANTENY TUBOWEJ I ANTENY
WOJSKOWA AKADEMIA TECHNICZNA WYDZIAŁ ELEKTRONIKI INSTYTUT TELEKOMUNIKACJI ZAKŁAD RADIOKOMUNIKACJI L a b o r a t o r i u m A n t e n INSTRUKCJA LABORATORYJNA ĆWICZENIE NR 15: BADANIE ANTENY TUBOWEJ I ANTENY
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia III. Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia III Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia Sonda poboru ciśnienia Sonda poboru ciśnienia (Rys. ) jest to urządzenie
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia III Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia Sonda poboru ciśnienia Sonda poboru ciśnienia (Rys. ) jest to urządzenie
ODORYMETRIA. Joanna Kośmider. Ćwiczenia laboratoryjne i obliczenia. Część I ĆWICZENIA LABORATORYJNE. Ćwiczenie 1 POMIARY EMISJI ODORANTÓW
 Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
dr hab. inż. P. Samczyński, prof. PW; pok. 453, tel. 5588, EIK
 dr hab. inż. P. Samczyński, prof. PW; pok. 453, tel. 5588, e-mail: psamczyn@elka.pw.edu.pl EIK Programowy symulator lotu samolotów i platform bezzałogowych Celem pracy jest opracowanie interfejsów programowych
dr hab. inż. P. Samczyński, prof. PW; pok. 453, tel. 5588, e-mail: psamczyn@elka.pw.edu.pl EIK Programowy symulator lotu samolotów i platform bezzałogowych Celem pracy jest opracowanie interfejsów programowych
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
BEZKONTAKTOWA METODA POMIARU KĄTA ELEMENTU ZGINANEGO NA PRASIE KRAWĘDZIOWEJ
 BEKONTAKTOWA METODA OMIARU KĄTA ELEMENTU GINANEGO NA RASIE KRAWĘDIOWEJ rof. dr hab. inż. Marek ieliński Dr hab. inż. Feliks Chwarścianek Dr Bernard iętek Dr Marcin Kowalski Dr Leszek Wydźgowski 1 Wstęp
BEKONTAKTOWA METODA OMIARU KĄTA ELEMENTU GINANEGO NA RASIE KRAWĘDIOWEJ rof. dr hab. inż. Marek ieliński Dr hab. inż. Feliks Chwarścianek Dr Bernard iętek Dr Marcin Kowalski Dr Leszek Wydźgowski 1 Wstęp
Wymiar: Forma: Semestr: 30 h wykład VII 30 h laboratoria VII
 Pomiary przemysłowe Wymiar: Forma: Semestr: 30 h wykład VII 30 h laboratoria VII Efekty kształcenia: Ma uporządkowaną i pogłębioną wiedzę z zakresu metod pomiarów wielkości fizycznych w przemyśle. Zna
Pomiary przemysłowe Wymiar: Forma: Semestr: 30 h wykład VII 30 h laboratoria VII Efekty kształcenia: Ma uporządkowaną i pogłębioną wiedzę z zakresu metod pomiarów wielkości fizycznych w przemyśle. Zna
Otwór w panelu WYMIAR MINIMALNIE OPTYMALNIE MAKSYMALNIE A 71(2,795) 71(2,795) 71,8(2,829) B 29(1,141) 29(1,141) 29,8(1,173)
 71(2,795) 71,8(2,829) B 29(1,141) 29(1,141) 29,8(1,173)") EVK401 Cyfrowy Termoregulator ogólnego zastosowania z pojedynczym wyjściem 1. WSTĘP 1.1 Ważne Przed montażem i użytkowaniem należy uważnie przeczytać następującą instrukcję, ściśle stosować się do dodatkowych
EVK401 Cyfrowy Termoregulator ogólnego zastosowania z pojedynczym wyjściem 1. WSTĘP 1.1 Ważne Przed montażem i użytkowaniem należy uważnie przeczytać następującą instrukcję, ściśle stosować się do dodatkowych
Zastrzeżony znak handlowy Copyright Institut Dr. Foerster 2010. Koercyjne natężenie pola Hcj
 Zastrzeżony znak handlowy Copyright Institut Dr. Foerster 2010 Koercyjne natężenie pola Hcj KOERZIMAT 1.097 HCJ jest sterowanym komputerowo przyrządem pomiarowym do szybkiego, niezależnego od geometrii
Zastrzeżony znak handlowy Copyright Institut Dr. Foerster 2010 Koercyjne natężenie pola Hcj KOERZIMAT 1.097 HCJ jest sterowanym komputerowo przyrządem pomiarowym do szybkiego, niezależnego od geometrii
Pomiar prędkości obrotowej
 2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
Retransmiter UNI LEGION.
 Retransmiter UNI LEGION. Parametry techniczne. Retransmiter UNI jest bezobsługowym urządzeniem elektronicznym służącym do odbioru sygnałów z nadajników radiowych pasma 400MHz, produkowanych przez firmę
Retransmiter UNI LEGION. Parametry techniczne. Retransmiter UNI jest bezobsługowym urządzeniem elektronicznym służącym do odbioru sygnałów z nadajników radiowych pasma 400MHz, produkowanych przez firmę
MONITORING PRZESTRZENI ELEKTROMAGNETYCZNEJ
 MONITORING PRZESTRZENI ELEKTROMAGNETYCZNEJ (wybrane zagadnienia) Opracowanie : dr inż. Adam Konrad Rutkowski 1 Monitorowanie przestrzeni elektromagnetycznej Celem procesu monitorowania przestrzeni elektromagnetycznej
MONITORING PRZESTRZENI ELEKTROMAGNETYCZNEJ (wybrane zagadnienia) Opracowanie : dr inż. Adam Konrad Rutkowski 1 Monitorowanie przestrzeni elektromagnetycznej Celem procesu monitorowania przestrzeni elektromagnetycznej
RADIONAMIARY. zasady, sposoby, kalibracja, błędy i ograniczenia
 RADIONAMIARY zasady, sposoby, kalibracja, błędy i ograniczenia 1 Radionamierzanie jest to: Określenie kąta, zawartego między północną częścią lokalnego południka geograficznego a kierunkiem na dany obiekt,
RADIONAMIARY zasady, sposoby, kalibracja, błędy i ograniczenia 1 Radionamierzanie jest to: Określenie kąta, zawartego między północną częścią lokalnego południka geograficznego a kierunkiem na dany obiekt,
Załącznik nr 2 do SIWZ FORMULARZ OFERTOWY
 ZP4/2017 Załącznik nr 2 do SIWZ FORMULARZ OFERTOWY OFERTA Prezes Zarządu Marine Technology Sp. z o. o. ul. Roszczynialskiego 4 lok. 6 81 521 Gdynia W postępowaniu o udzielenie zamówienia publicznego prowadzonego
ZP4/2017 Załącznik nr 2 do SIWZ FORMULARZ OFERTOWY OFERTA Prezes Zarządu Marine Technology Sp. z o. o. ul. Roszczynialskiego 4 lok. 6 81 521 Gdynia W postępowaniu o udzielenie zamówienia publicznego prowadzonego
Wprowadzenie nawigacja pilotowa jest to lokalna nawigacja wodna z uwzględnieniem znaków nawigacyjnych znajdujących się na danym akwenie i terenach
 Wprowadzenie W zależności od stosowanych urządzeń, nawigację można podzielić na następujące działy: nawigacja astronomiczna, astronawigacja jest to nawigacja oparta na obserwacji ciał niebieskich, przy
Wprowadzenie W zależności od stosowanych urządzeń, nawigację można podzielić na następujące działy: nawigacja astronomiczna, astronawigacja jest to nawigacja oparta na obserwacji ciał niebieskich, przy
NODA System Zarządzania Energią
 STREFA sp. z o.o. Przedstawiciel i dystrybutor systemu NODA w Polsce NODA System Zarządzania Energią Usługi optymalizacji wykorzystania energii cieplnej Piotr Selmaj prezes zarządu STREFA Sp. z o.o. POLEKO:
STREFA sp. z o.o. Przedstawiciel i dystrybutor systemu NODA w Polsce NODA System Zarządzania Energią Usługi optymalizacji wykorzystania energii cieplnej Piotr Selmaj prezes zarządu STREFA Sp. z o.o. POLEKO:
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
F&F Filipowski Sp. J Pabianice, ul. Konstantynowska 79/81 tel KARTA KATALOGOWA
 KARTA KATALOGOWA rh-r1s1t1 LR Nadajnik jednokanałowy, pojedynczy przekaźnik z zewnętrznym czujnikiem do pomiaru temperatury systemu F&Home RADIO. Wersja LR powiększony zasięg. rh-r1s1t1 LR jest odmianą
KARTA KATALOGOWA rh-r1s1t1 LR Nadajnik jednokanałowy, pojedynczy przekaźnik z zewnętrznym czujnikiem do pomiaru temperatury systemu F&Home RADIO. Wersja LR powiększony zasięg. rh-r1s1t1 LR jest odmianą
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Research & Development Ultrasonic Technology / Fingerprint recognition
 Research & Development Ultrasonic Technology / Fingerprint recognition DATA SHEETS & OPKO http://www.optel.pl email: optel@optel.pl Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Spółka z o.o. ul. Otwarta
Research & Development Ultrasonic Technology / Fingerprint recognition DATA SHEETS & OPKO http://www.optel.pl email: optel@optel.pl Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Spółka z o.o. ul. Otwarta
Regulacja dwupołożeniowa (dwustawna)
") Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
STYCZNIK PRÓŻNIOWY CXP 630A kV INSTRUKCJA OBSŁUGI
 STYCZNIK PRÓŻNIOWY CXP 630A 630-12kV INSTRUKCJA OBSŁUGI Olsztyn, 2011 1. SPRAWDZENIE, KWALIFIKACJA Przed zainstalowaniem urządzenia należy sprawdzić, czy jest on zgodny z zamówieniem, w szczególności w
STYCZNIK PRÓŻNIOWY CXP 630A 630-12kV INSTRUKCJA OBSŁUGI Olsztyn, 2011 1. SPRAWDZENIE, KWALIFIKACJA Przed zainstalowaniem urządzenia należy sprawdzić, czy jest on zgodny z zamówieniem, w szczególności w
Wydział Chemii Uniwersytet Łódzki ul. Tamka 12, Łódź
 Wydział Chemii Uniwersytet Łódzki ul. Tamka 12, 91-403 Łódź Rozporządzenie Ministra Środowiska z dnia 30.10.2003r. W sprawie dopuszczalnych poziomów pól elektromagnetycznych w środowisku oraz sposobów
Wydział Chemii Uniwersytet Łódzki ul. Tamka 12, 91-403 Łódź Rozporządzenie Ministra Środowiska z dnia 30.10.2003r. W sprawie dopuszczalnych poziomów pól elektromagnetycznych w środowisku oraz sposobów