Podstawy Automatyki. Wykład 12 - Układy przekaźnikowe. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
|
|
|
- Klaudia Romanowska
- 9 lat temu
- Przeglądów:
Transkrypt
1 Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015

2 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów logicznych (sieci bramkowe), z wykorzystaniem układów o średniej skali integracji (z wykorzystaniem bloków funkcyjnych), z wykorzystaniem techniki komputerowej (np. sterowników programowalnych). Układy stykowo-przekaźnikowe Przekaźnik stykowy jest urządzeniem mającym zestyk lub kilka zestyków, których stan (zwarcie lub rozwarcie) zależy od wartości sygnału wejściowego oddziałującego na przekaźnik.

3 Stan, w którym na przekaźnik nie działają sygnały zewnętrzne nazywa się stanem normalnym przekaźnika. Stąd wynikają nazwy zestyków stosowanych w przekaźnikach: zestyk normalnie otwarty (no), zwany także zestykiem zwiernym, który tworzą dwa styki, w stanie normalnym nie stykające się ze sobą zestyk normalnie zwarty (nz), zwany także zestykiem rozwiernym, tworzą dwa styki stykające się w stanie normalnym, zestyk przełączny tworzą trzy styki pełniące rolę zestyków no i nz.

4 Ze względu na spełnianą funkcję w układzie przekaźnikowym rozróżnia się: przekaźniki wejściowe, umożliwiające przyjmowanie przez układ sygnałów zewnętrznych; są to przekaźniki sterowane ręcznie (elementy operatorskie), mechanicznie, magnetycznie, przekaźniki temperatury, ciśnienia itp. przekaźniki pośredniczące, służące do przetwarzania i wzmacniania sygnałów dostarczanych przez przekaźniki wejściowe, przekaźniki wyjściowe (wykonawcze), zwane także stycznikami, przystosowane pod względem mocy do sterowania elementami wykonawczymi np. silnikami, hamulcami, grzejnikami itp.
, zwane także stycznikami, przystosowane pod względem mocy do sterowania elementami wykonawczymi np.")
5 Rysunek : Elementy przełączające - przekaźniki wejściowe

6 Rysunek : Działanie przycisku - zestyk przełączny

7 Rysunek : Oznaczenia sposobów ręcznego oddziaływania na łączniki

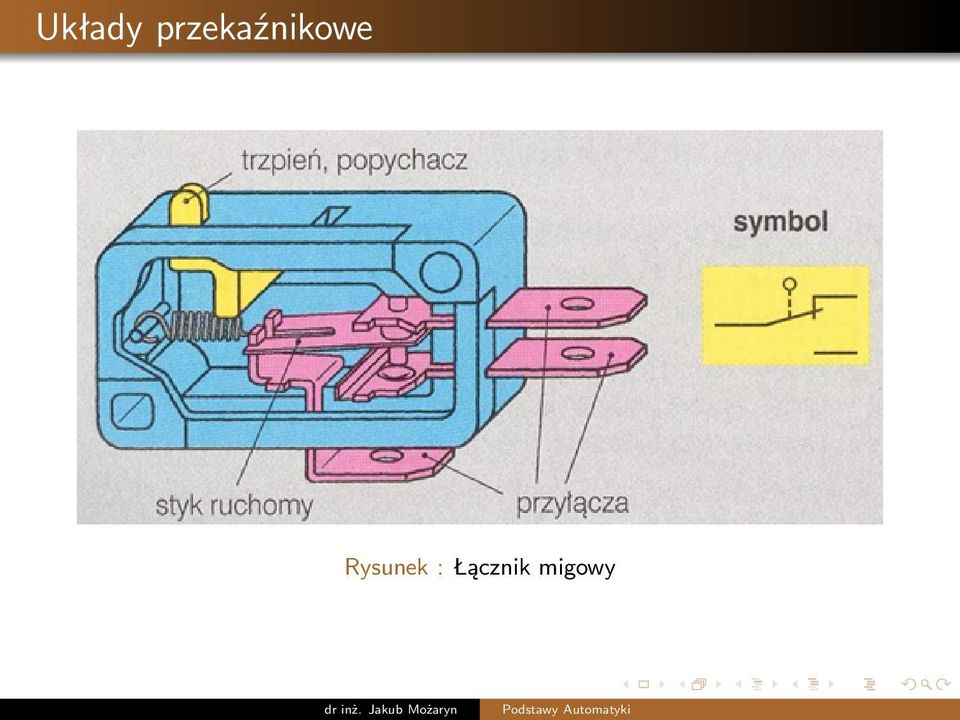
8 Rysunek : Łącznik migowy
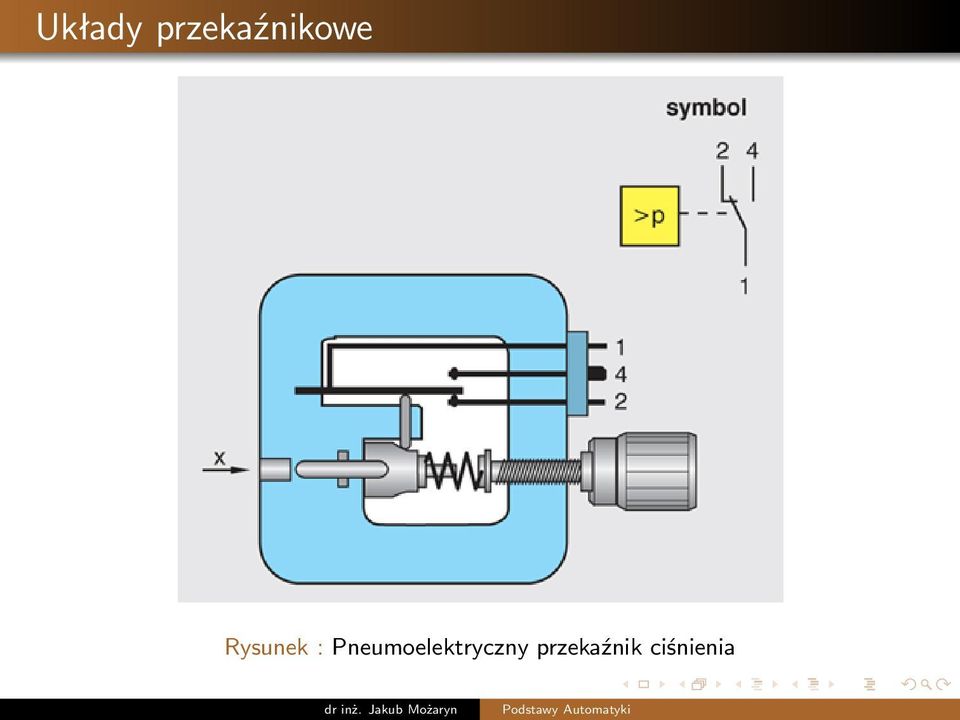
9 Rysunek : Pneumoelektryczny przekaźnik ciśnienia

10 Rysunek : Kontaktronowy czujnik położenia tłoka siłownika

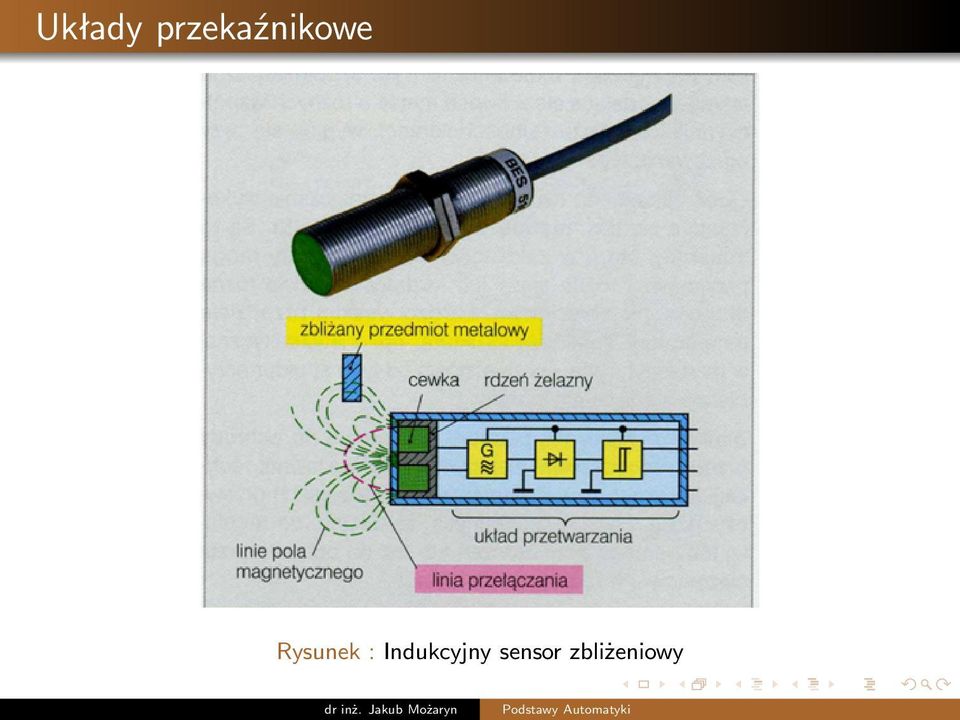
11 Rysunek : Indukcyjny sensor zbliżeniowy
12 Rysunek : Optyczny sensor zbliżeniowy


13 Rysunek : Symbole elektronicznych sensorów zbliżeniowych Czujnik indukcyjny element automatyki przemysłowej reagujący na zbliżanie do jego powierzchni aktywnej (pola czujnika) metalu. Czujnik optyczny element automatyki, reaguje na obiekty przecinające wiązkę światła pomiędzy nadajnikiem a odbiornikiem lub na wiązkę odbitą od obiektu. Czujnik pojemnościowy element automatyki przemysłowej reagujący na zbliżanie do jego powierzchni aktywnej (pola czujnika) dowolnego materiału (medium).

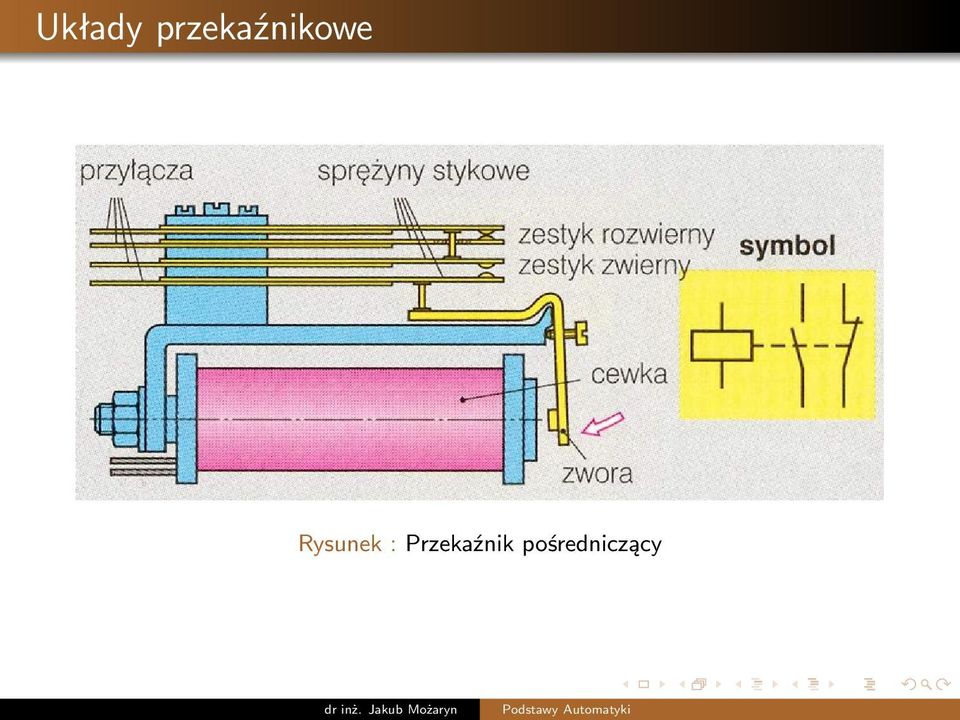
14 Rysunek : Przekaźnik pośredniczący
15 Układy przekaźnikowe Rysunek : Przekaźnik wykonawczy (stycznik przystosowany do przewodzenia odpowiednio dużych prądów)

16 Przekaźnikowe realizacje funkcji elementarnych - notacja naukowa i notacja montażowa

17 Przykłady przekaźnikowej realizacje wybranych funkcji logicznych - notacja naukowa i notacja montażowa

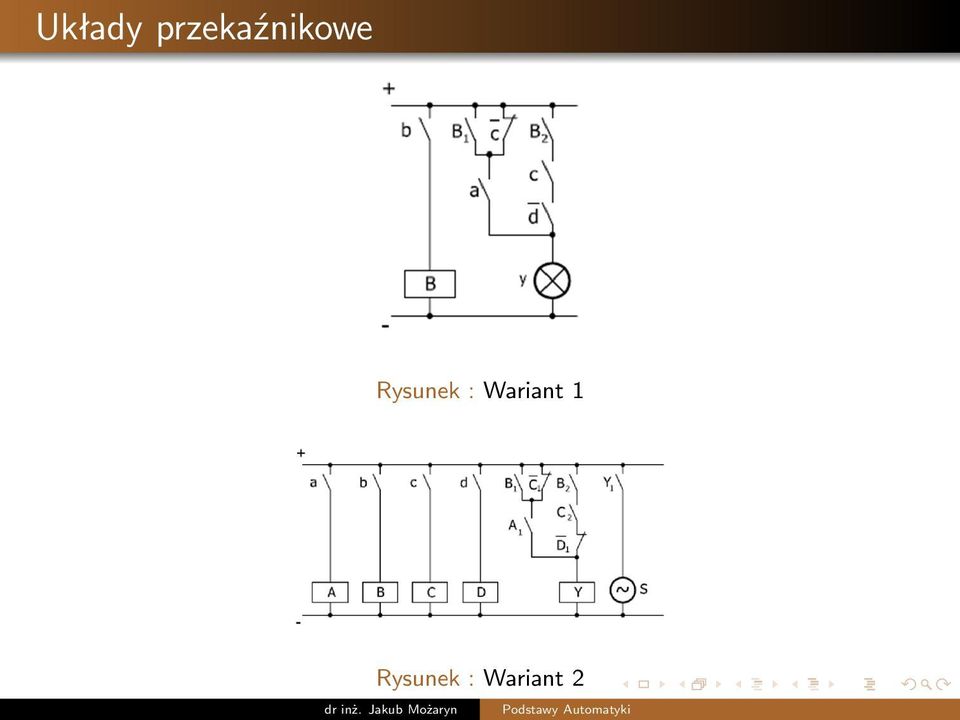
18 Celowość wykorzystania przekaźników pośredniczących. Przykład 1: Zrealizować funkcję podaną w tablicy Karnaugha, z wykorzystaniem przekaźników pośredniczących. y = a b + a c + b c d = a (b + c) + b c d (1)

19 Rysunek : Wariant 1 Rysunek : Wariant 2
20 Przekaźniki pośredniczące stosuje się w celu: uzyskania potrzebnej liczby zestyków, odpowiadających temu samemu sygnałowi wejściowemu, przetwarzania sygnałów o małej mocy na równoważne, lecz większej mocy, przekazywania sygnałów pomiędzy obwodami o różnych napięciach lub innych rodzajach prądu (stały - zmienny), realizacji sprzężeń zwrotnych w przekaźnikowych układach sekwencyjnych
, realizacji sprzężeń zwrotnych w przekaźnikowych")
21 Zaprojektować układ sterowania wentylacją - wariant 2 (przykład 1 z wykładu 1) Rysunek : Wariant 2 y = x 1 x 2 + x 1 x 3 + x 2 x 3 = x 1 (x 2 + x 3 ) + x 2 x 3 (3)
22 y = x 1 x 2 + x 1 x 3 + x 2 x 3 = x 1 (x 2 + x 3 ) + x 2 x 3 (4)
23 Układy przekaźnikowe wykorzystywane są jako część sterująca elektropneumatycznych i elektrohydraulicznych układów sterowania. Oddziałują one na pneumatyczną lub hydrauliczną część wykonawczą za pośrednictwem pneumatycznych lub hydraulicznych zaworów sterowanych elektrycznie. Rysunek : Monostabilny zawór rozdzielający 3/2 sterowany elektrycznie

24 Rysunek : Bistabilny zawór rozdzielający 5/2 sterowany elektrycznie pośrednio (ze wspomaganiem)
25 Rysunek : Schemat poglądowy elektropneumatycznego układu sterowania
26 Rysunek : Właściwy schemat elektropneumatycznego układu sterowania
27 Rysunek : Układ do realizacji oscylacyjnych ruchów tłoka siłownika
28 Dowolnie złożony układ logiczny można zrealizować wykorzystując szeregowe lub równoległe połączenia zestyków no lub nz. Takie układy przekaźnikowe nazywają się układami szeregowo-równoległymi albo układami klasy Π. Niekiedy możliwe jest uproszczenie układu klasy Π przez umieszczenie zestyków pomiędzy gałęziami równoległymi. Takie układy przekaźnikowe nazywają się układami mostkowymi albo układami klasy H. Przykładem układu mostkowego jest tzw. mostek elementarny.

29 Rysunek : Mostek elementarny i równoważny układ szeregowo - równoległy Funkcja realizowana przez mostek elementarny y = a c + b d + a e d + b e c (5)
30 Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015
Podstawy Automatyki. Człowiek- najlepsza inwestycja. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
 Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Ćwiczenie PA1. Realizacja układów dyskretnych z przekaźników i bramek NAND
 - laboratorium Ćwiczenie PA Realizacja układów dyskretnych z przekaźników i bramek NAND Instrukcja laboratoryjna Opracował : dr inŝ. Wieńczysław J. Kościelny Człowiek - najlepsza inwestycja Projekt współfinansowany
- laboratorium Ćwiczenie PA Realizacja układów dyskretnych z przekaźników i bramek NAND Instrukcja laboratoryjna Opracował : dr inŝ. Wieńczysław J. Kościelny Człowiek - najlepsza inwestycja Projekt współfinansowany
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Podstawy Automatyki. Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2016 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2016 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
dr inż. Piotr Pawełko / Przed przystąpieniem do realizacji ćwiczenia patrz punkt 6!!!
 Laboratorium nr2 Temat: Sterowanie pośrednie siłownikami jednostronnego i dwustronnego działania. 1. Wstęp Sterowanie pośrednie stosuje się do sterowania elementami wykonawczymi (siłownikami, silnikami)
Laboratorium nr2 Temat: Sterowanie pośrednie siłownikami jednostronnego i dwustronnego działania. 1. Wstęp Sterowanie pośrednie stosuje się do sterowania elementami wykonawczymi (siłownikami, silnikami)
Podstawy Automatyki. Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2015 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2015 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
ARKUSZ EGZAMINACYJNY
 Zawód: technik mechatronik Symbol cyfrowy: 311[50] 311[50]-01-062 Numer zadania: 1 Czas trwania egzaminu: 240 minut ARKUSZ EGZAMINACYJNY ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE
Zawód: technik mechatronik Symbol cyfrowy: 311[50] 311[50]-01-062 Numer zadania: 1 Czas trwania egzaminu: 240 minut ARKUSZ EGZAMINACYJNY ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE
Podstawy Automatyki. Wykład 13 - Układy bramkowe. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Podstawy Automatyki. Człowiek- najlepsza inwestycja. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
 Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE
 ĆWICZENIE 1) UKŁADY PRZEŁĄCZAJĄCE OPARTE NA ELEMENTACH STYKOWYCH PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE ZAPOZNANIE SIĘ Z TREŚCIĄ INSTRUKCJI CEL ĆWICZENIA: Celem ćwiczenia jest poznanie:
ĆWICZENIE 1) UKŁADY PRZEŁĄCZAJĄCE OPARTE NA ELEMENTACH STYKOWYCH PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE ZAPOZNANIE SIĘ Z TREŚCIĄ INSTRUKCJI CEL ĆWICZENIA: Celem ćwiczenia jest poznanie:
Podstawy Automatyki. Wykład 13 - Układy bramkowe. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
str. 1 Temat: Sterowanie stycznikami za pomocą przycisków.
 Temat: Sterowanie stycznikami za pomocą przycisków. Na rys. 7.17 przedstawiono układ sterowania silnika o rozruchu bezpośrednim za pomocą stycznika. Naciśnięcie przycisku Z powoduje podanie napięcia na
Temat: Sterowanie stycznikami za pomocą przycisków. Na rys. 7.17 przedstawiono układ sterowania silnika o rozruchu bezpośrednim za pomocą stycznika. Naciśnięcie przycisku Z powoduje podanie napięcia na
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175233 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 307218 (22) Data zgłoszenia: 13.02.1995 (51) Int.Cl.6: E05F 15/02
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175233 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 307218 (22) Data zgłoszenia: 13.02.1995 (51) Int.Cl.6: E05F 15/02
INDEKS ALFABETYCZNY CEI:2002
 69 60050-444 CEI:2002 INDEKS ALFABETYCZNY B badanie badanie trwałości przekaźnika... 444-07-12 bezprzerwowy zestyk przełączny bezprzerwowy... 444-04-20 bistabilny przekaźnik bistabilny... 444-01-08 C CA
69 60050-444 CEI:2002 INDEKS ALFABETYCZNY B badanie badanie trwałości przekaźnika... 444-07-12 bezprzerwowy zestyk przełączny bezprzerwowy... 444-04-20 bistabilny przekaźnik bistabilny... 444-01-08 C CA
BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-3 BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-3 BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał
NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY
 PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Sterowanie pośrednie siłownikami jednostronnego i dwustronnego działania Materiały przeznaczone są dla studentów Wydziału
PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Sterowanie pośrednie siłownikami jednostronnego i dwustronnego działania Materiały przeznaczone są dla studentów Wydziału
Podstawy PLC. Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń.
 Podstawy PLC Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń. WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program
Podstawy PLC Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń. WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program
Dydaktyczne stanowisko pneumatyki i elektropneumatyki SP 201
 Dydaktyczne stanowisko pneumatyki i elektropneumatyki SP 201 Chojnów 2012 1 1. PRZEZNACZENIE STANOWISKA. Stanowisko pneumatyki i elektropneumatyki jest przeznaczone do wyposaŝenia pracowni układów mechatroniki,
Dydaktyczne stanowisko pneumatyki i elektropneumatyki SP 201 Chojnów 2012 1 1. PRZEZNACZENIE STANOWISKA. Stanowisko pneumatyki i elektropneumatyki jest przeznaczone do wyposaŝenia pracowni układów mechatroniki,
Szczegółowy opis przedmiotu zamówienia
 Szczegółowy opis przedmiotu zamówienia SPECYFIKACJA TECHNICZNO-UŻYTKOWA Załącznik nr 1 do SIWZ Specyfikacja stanowiska egzaminacyjnego w zawodzie technik mechatronik dla kwalifikacji E.3 ma spełniać następujące
Szczegółowy opis przedmiotu zamówienia SPECYFIKACJA TECHNICZNO-UŻYTKOWA Załącznik nr 1 do SIWZ Specyfikacja stanowiska egzaminacyjnego w zawodzie technik mechatronik dla kwalifikacji E.3 ma spełniać następujące
BADANIE STYCZNIKOWO- PRZEKAŹNIKOWYCH UKŁADÓW STEROWANIA
 BADANIE STYCZNIKOWO- PRZEKAŹNIKOWYCH UKŁADÓW STEROWANIA Strona 1/7 BADANIE STYCZNIKOWO- PRZEKAŹNIKOWYCH UKŁADÓW STEROWANIA 1. Wiadomości wstępne Stycznikowo-przekaźnikowe uklady sterowania znajdują zastosowanie
BADANIE STYCZNIKOWO- PRZEKAŹNIKOWYCH UKŁADÓW STEROWANIA Strona 1/7 BADANIE STYCZNIKOWO- PRZEKAŹNIKOWYCH UKŁADÓW STEROWANIA 1. Wiadomości wstępne Stycznikowo-przekaźnikowe uklady sterowania znajdują zastosowanie
Zautomatyzowane systemy produkcyjne Kod przedmiotu
 Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
1. Wstęp. dr inż. Piotr Pawełko / Przed przystąpieniem do realizacji ćwiczenia patrz punkt 4!!!
 Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Wykład 9. Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego:
 Serwonapędy w automatyce i robotyce Wykład 9 Piotr Sauer Katedra Sterowania i Inżynierii Systemów przełączających Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego: intuicyjna
Serwonapędy w automatyce i robotyce Wykład 9 Piotr Sauer Katedra Sterowania i Inżynierii Systemów przełączających Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego: intuicyjna
PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE
 ĆWICZENIE 1) UKŁADY PRZEŁĄCZAJĄCE OPARTE NA ELEMENTACH STYKOWYCH PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE ZAPOZNANIE SIĘ Z TREŚCIĄ INSTRUKCJI CEL ĆWICZENIA: Celem ćwiczenia jest poznanie:
ĆWICZENIE 1) UKŁADY PRZEŁĄCZAJĄCE OPARTE NA ELEMENTACH STYKOWYCH PRZED PRZYSTĄPIENIEM DO ZAJĘĆ PROSZĘ O BARDZO DOKŁADNE ZAPOZNANIE SIĘ Z TREŚCIĄ INSTRUKCJI CEL ĆWICZENIA: Celem ćwiczenia jest poznanie:
3.2.3. Optyczny czujnik zbliżeniowy... 80 3.3. Zestawy przekaźników elektrycznych... 81 3.3.1. Przekaźniki zwykłe... 81 3.3.2. Przekaźniki czasowe...
 3 SPIS TREŚCI WYKAZ WAŻNIEJSZYCH SYMBOLI GRAFICZNYCH ELEMENTÓW PNEUMATYCZNYCH I ELEKTROPNEUMATYCZNYCH UŻYTYCH W PODRĘCZNIKU... 11 1. WPROWADZENIE... 15 1.1. Uwagi ogólne... 15 1.2. Podstawy teoretyczne
3 SPIS TREŚCI WYKAZ WAŻNIEJSZYCH SYMBOLI GRAFICZNYCH ELEMENTÓW PNEUMATYCZNYCH I ELEKTROPNEUMATYCZNYCH UŻYTYCH W PODRĘCZNIKU... 11 1. WPROWADZENIE... 15 1.1. Uwagi ogólne... 15 1.2. Podstawy teoretyczne
Załącznik nr 1 do specyfikacji istotnych warunków zamówienia
 Załącznik nr 1 do specyfikacji istotnych warunków zamówienia Lp. Nazwa (rodzaj) urządzenia Ilość Jm. Charakterystyka, opis minimalnych parametrów 1 2 3 4 5 1 Sprężarka 1 szt. ciśnienie 8 atn, wydajność
Załącznik nr 1 do specyfikacji istotnych warunków zamówienia Lp. Nazwa (rodzaj) urządzenia Ilość Jm. Charakterystyka, opis minimalnych parametrów 1 2 3 4 5 1 Sprężarka 1 szt. ciśnienie 8 atn, wydajność
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykaz ważniejszych symboli graficznych elementów pneumatycznych i elektropneumatycznych użytych w podręczniku 11
 Spis treści Wykaz ważniejszych symboli graficznych elementów pneumatycznych i elektropneumatycznych użytych w podręczniku 11 1. Wprowadzenie 15 Uwagi ogólne 15 Podstawy teoretyczne - Program FluidStudio-P
Spis treści Wykaz ważniejszych symboli graficznych elementów pneumatycznych i elektropneumatycznych użytych w podręczniku 11 1. Wprowadzenie 15 Uwagi ogólne 15 Podstawy teoretyczne - Program FluidStudio-P
Tabela symboli stosowanych w automatyce przemysłowej Symbol Opis Uwagi
 Tabela symboli stosowanych w automatyce przemysłowej Symbol Opis Uwagi cewka, napęd elektromagnetyczny symbol ogólny cewka z dodatkowym działaniem symbol ogólny cewka o działaniu czasowym ( opóźnienie
Tabela symboli stosowanych w automatyce przemysłowej Symbol Opis Uwagi cewka, napęd elektromagnetyczny symbol ogólny cewka z dodatkowym działaniem symbol ogólny cewka o działaniu czasowym ( opóźnienie
Podstawy Automatyki. Człowiek- najlepsza inwestycja. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
 Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Program 2 Podstawy Automatyki Instytut Automatyki i Robotyki
Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Program 2 Podstawy Automatyki Instytut Automatyki i Robotyki
Dostawa elementów i urządzeń do uzupełnia oraz rozszerzenia wyposażenia Laboratorium Pneumatycznych Napędów Robotyki
 Dostawa elementów i urządzeń do uzupełnia oraz rozszerzenia wyposażenia Laboratorium Pneumatycznych Napędów Robotyki Przedmiotem zamówienia jest dostawa elementów i urządzeń stanowiących uzupełnienie oraz
Dostawa elementów i urządzeń do uzupełnia oraz rozszerzenia wyposażenia Laboratorium Pneumatycznych Napędów Robotyki Przedmiotem zamówienia jest dostawa elementów i urządzeń stanowiących uzupełnienie oraz
OPIS PRZEDMIOTU ZAMÓWIENIA
 Załącznik nr 2 do Zapytania ofertowego nr 13/CRUR/2017 OPIS PRZEDMIOTU ZAMÓWIENIA Zakup komponentów do utworzenia stanowiska do projektowania i testowania układów pneumatycznych, hydraulicznych i elektrycznych
Załącznik nr 2 do Zapytania ofertowego nr 13/CRUR/2017 OPIS PRZEDMIOTU ZAMÓWIENIA Zakup komponentów do utworzenia stanowiska do projektowania i testowania układów pneumatycznych, hydraulicznych i elektrycznych
07 - Zawory i elektrozawory. - Podstawowe zasady, schematy działania - Krzywe natężenia przepływu
 - Zawory i elektrozawory - Podstawowe zasady, schematy działania - Krzywe natężenia przepływu INFORMACJE OGÓLNE W układach pneumatycznych zawór jest elementem, który kieruje sprężonym powietrzem, zmieniając
- Zawory i elektrozawory - Podstawowe zasady, schematy działania - Krzywe natężenia przepływu INFORMACJE OGÓLNE W układach pneumatycznych zawór jest elementem, który kieruje sprężonym powietrzem, zmieniając
Znak sprawy:or Formularz cenowo techniczny (opis przedmiotu zamówienia) Dostawa pomocy dydaktycznych do pracowni mechatronicznej
 Dostawa pomocy dydaktycznych do pracowni mechatronicznej") Znak sprawy:or.27. 1.201. miejscowość, data Załącznik nr 2 do SIWZ Formularz cenowo techniczny (opis przedmiotu zamówienia) Dostawa pomocy dydaktycznych do pracowni mechatronicznej Cena ofertowa musi byd
Znak sprawy:or.27. 1.201. miejscowość, data Załącznik nr 2 do SIWZ Formularz cenowo techniczny (opis przedmiotu zamówienia) Dostawa pomocy dydaktycznych do pracowni mechatronicznej Cena ofertowa musi byd
PRACA PRZEJŚCIOWA MAGISTERSKA. Realizacja układów dyskretnych z przekaźników i elementów logicznych
 Warszawa, dn. 10.02.2013 PRACA PRZEJŚCIOWA MAGISTERSKA Temat: Realizacja układów dyskretnych z przekaźników i elementów logicznych Promotor pracy: Mgr inż. Alicja Siewnicka Wykonał: inż. Michał Zieliński
Warszawa, dn. 10.02.2013 PRACA PRZEJŚCIOWA MAGISTERSKA Temat: Realizacja układów dyskretnych z przekaźników i elementów logicznych Promotor pracy: Mgr inż. Alicja Siewnicka Wykonał: inż. Michał Zieliński
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Plan wynikowy Technik Mechatronik - Urządzenia i systemy mechatroniczne
 lan wynikowy Technik Mechatronik - Urządzenia i systemy mechatroniczne Klasa II - Ilość godzin = 37 tygodni x 2 godziny = 74 godzin Klasa III - Ilość godzin = 37 tygodnie x 4 godziny = 148 godzin Klasa
lan wynikowy Technik Mechatronik - Urządzenia i systemy mechatroniczne Klasa II - Ilość godzin = 37 tygodni x 2 godziny = 74 godzin Klasa III - Ilość godzin = 37 tygodnie x 4 godziny = 148 godzin Klasa
NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY
 PIOTR PAWEŁO NAPĘD I STEROWANIE PNEUMATCZNE PODSTAW ĆWICZENIA LABORATORJNE Układy elektropneumatyczne Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i Mechatroniki kopiowanie,
PIOTR PAWEŁO NAPĘD I STEROWANIE PNEUMATCZNE PODSTAW ĆWICZENIA LABORATORJNE Układy elektropneumatyczne Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i Mechatroniki kopiowanie,
Styczniki i przekaźniki easyconnect SmartWire
 Styczniki i przekaźniki Łączenie zamiast okablowania Duża część układów sterowania maszyn jest obecnie realizowana przez sterowniki swobodnie programowalne (PLC). Sterownik PLC jest instalowany w szafce
Styczniki i przekaźniki Łączenie zamiast okablowania Duża część układów sterowania maszyn jest obecnie realizowana przez sterowniki swobodnie programowalne (PLC). Sterownik PLC jest instalowany w szafce
rh-r3s3 Przekaźnik trzykanałowy z trzema wejściami systemu F&Home RADIO.
 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-r3s3 Przekaźnik trzykanałowy z trzema wejściami systemu F&Home RADIO. 95-00 Pabianice, ul. Konstantynowska
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-r3s3 Przekaźnik trzykanałowy z trzema wejściami systemu F&Home RADIO. 95-00 Pabianice, ul. Konstantynowska
BUDOWA PNEUMATYCZNEGO STEROWNIKA
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-18 BUDOWA PNEUMATYCZNEGO STEROWNIKA Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. 2 Temat ćwiczenia:
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-18 BUDOWA PNEUMATYCZNEGO STEROWNIKA Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. 2 Temat ćwiczenia:
Formularz Ofertowy ul... kod miejscowość.. województwo... powiat... Nr telefonu... Nr faxu... Regon...NIP...
 Formularz Ofertowy Zarejestrowana nazwa (firma) Wykonawcy:....... Zarejestrowany adres siedziba (Wykonawcy): ul... kod..-... miejscowość.. województwo..... powiat.... Nr telefonu... Nr faxu... Regon...NIP...
Formularz Ofertowy Zarejestrowana nazwa (firma) Wykonawcy:....... Zarejestrowany adres siedziba (Wykonawcy): ul... kod..-... miejscowość.. województwo..... powiat.... Nr telefonu... Nr faxu... Regon...NIP...
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
mh-r8x8 Ośmiokrotny przekaźnik wykonawczy systemu F&Home.
 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA mh-r8x8 Ośmiokrotny przekaźnik wykonawczy systemu F&Home. 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA mh-r8x8 Ośmiokrotny przekaźnik wykonawczy systemu F&Home. 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48
4. Sylwetka absolwenta
 1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2019 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 218 Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 218 Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer
Jedn. 400 zestyk / zestyk. 500 min V zestyk / cewka. 500 zestyk / osłona cewka / osłona
 Przekaźniki kontaktronowe serii K-32/Nx1 Wyrób zgodny z dyrektywą RoHS PIT-RADWAR S.A. ODDZIAŁ WROCŁAW 50-425 Wrocław, ul. Krakowska 64 tel. (+48) 71/342-65-54, fax (+48) 71/342-58-59 e-mail: sales@dolam.pl
Przekaźniki kontaktronowe serii K-32/Nx1 Wyrób zgodny z dyrektywą RoHS PIT-RADWAR S.A. ODDZIAŁ WROCŁAW 50-425 Wrocław, ul. Krakowska 64 tel. (+48) 71/342-65-54, fax (+48) 71/342-58-59 e-mail: sales@dolam.pl
NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY
 PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Układy z pneumatycznymi przekaźnikami czasowymi Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i
PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Układy z pneumatycznymi przekaźnikami czasowymi Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Jedn. 300 zestyk / zestyk. 500 min V zestyk / cewka. 500 zestyk / osłona cewka / osłona
 Przekaźniki kontaktronowe serii K-9/Nx1 Wyrób zgodny z dyrektywą RoHS PIT-RADWAR S.A. ODDZIAŁ WROCŁAW 50-425 Wrocław, ul. Krakowska 64 tel. (+48) 71/342-65-54, fax (+48) 71/342-58-59 e-mail: sales@dolam.pl
Przekaźniki kontaktronowe serii K-9/Nx1 Wyrób zgodny z dyrektywą RoHS PIT-RADWAR S.A. ODDZIAŁ WROCŁAW 50-425 Wrocław, ul. Krakowska 64 tel. (+48) 71/342-65-54, fax (+48) 71/342-58-59 e-mail: sales@dolam.pl
Prezentacja na temat:
 Prezentacja na temat: Przykłady wykorzystania programowalnych sterowników PLC w systemach sterowania. Przedmiot: Sterowniki PLC Przedstawione w prezentacji materiały skopiowano z dokumentacji sterownika
Prezentacja na temat: Przykłady wykorzystania programowalnych sterowników PLC w systemach sterowania. Przedmiot: Sterowniki PLC Przedstawione w prezentacji materiały skopiowano z dokumentacji sterownika
Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy o wzmacniaczu mocy. Takim obciążeniem mogą być na przykład...
 Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy
Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy
Temat: Projekt i realizacja pneumatycznych układów sekwencyjnych.
 Praca przejściowa Temat: Projekt i realizacja pneumatycznych układów sekwencyjnych. Instrukcja laboratoryjna Wykonał: inż. Paweł Konarski Promotor: mgr inż. Alicja Siewnicka 1. Wstęp. Celem ćwiczenia jest
Praca przejściowa Temat: Projekt i realizacja pneumatycznych układów sekwencyjnych. Instrukcja laboratoryjna Wykonał: inż. Paweł Konarski Promotor: mgr inż. Alicja Siewnicka 1. Wstęp. Celem ćwiczenia jest
NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY
 PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Sterowanie sekwencyjne półautomatyczne i automatyczne Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej
PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Sterowanie sekwencyjne półautomatyczne i automatyczne Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA
 Układ graficzny CKE 2018 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż
Układ graficzny CKE 2018 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż
Projekt pn. Mam zawód mam pracę w regionie jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 ED.042.1.2014 Częstochowa, 11.08.2014 r. Zapytanie ofertowe wersja poprawiona ( wartość do 30 000 ) W związku z realizacją projektu pn. Mam zawód mam pracę w regionie w ramach Programu Operacyjnego Kapitał
ED.042.1.2014 Częstochowa, 11.08.2014 r. Zapytanie ofertowe wersja poprawiona ( wartość do 30 000 ) W związku z realizacją projektu pn. Mam zawód mam pracę w regionie w ramach Programu Operacyjnego Kapitał
Katedra Automatyzacji
 P o l i t e c h n i k a L u b e l s k a, Wy d z i a ł M e c h a n i c z n y Katedra Automatyzacji u l. Na d b y s trz y c k a 3 6, 2 0-6 1 8 L u b l i n te l./fa x.:(+4 8 8 1 ) 5 3 8 4 2 6 7 e -ma i l
P o l i t e c h n i k a L u b e l s k a, Wy d z i a ł M e c h a n i c z n y Katedra Automatyzacji u l. Na d b y s trz y c k a 3 6, 2 0-6 1 8 L u b l i n te l./fa x.:(+4 8 8 1 ) 5 3 8 4 2 6 7 e -ma i l
SZCZEGÓŁOWE WARUNKI I SPOSOBY OCENIANIA WEWNĄTRZSZKOLNEGO UCZNIÓW Z PRZEDMIOTU URZĄDZENIA I SYSTEMY MECHATRONICZNE
 SZZEGÓŁOWE WARUNKI I SPOSOBY OENIANIA WEWNĄTRZSZKOLNEGO UZNIÓW Z PRZEMIOTU URZĄZENIA I SYSTEMY MEHATRONIZNE Klasa II, III TEHNIK MEHATRONIK Nr programu: 311410 II - 30 tygodni x 2 godziny/tydzień = 60
SZZEGÓŁOWE WARUNKI I SPOSOBY OENIANIA WEWNĄTRZSZKOLNEGO UZNIÓW Z PRZEMIOTU URZĄZENIA I SYSTEMY MEHATRONIZNE Klasa II, III TEHNIK MEHATRONIK Nr programu: 311410 II - 30 tygodni x 2 godziny/tydzień = 60
w układzie zamkniętym, czyli w układzie ze sprzężeniem zwrotnym (układzie regulacji automatycznej):
:") Urządzenia wejściowe i wyjściowe do sterowników PLC. Przetworniki pomiarowe Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania;
Urządzenia wejściowe i wyjściowe do sterowników PLC. Przetworniki pomiarowe Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania;
CZĘŚĆ nr 2. zestaw czujników zbliŝeniowych,
 CZĘŚĆ nr 2 Dostawa i montaŝ wyposaŝenia pracowni układów mechatronicznych Lp. Nazwa sprzętu i jego krótki opis Charakterystyka techniczna wymagania Ilość Stanowiska sensoryki zestaw czujników zbliŝeniowych,
CZĘŚĆ nr 2 Dostawa i montaŝ wyposaŝenia pracowni układów mechatronicznych Lp. Nazwa sprzętu i jego krótki opis Charakterystyka techniczna wymagania Ilość Stanowiska sensoryki zestaw czujników zbliŝeniowych,
Projektowanie siłowych układów hydraulicznych - opis przedmiotu
 Projektowanie siłowych układów hydraulicznych - opis przedmiotu Informacje ogólne Nazwa przedmiotu Projektowanie siłowych układów hydraulicznych Kod przedmiotu 06.1-WM-MiBM-MiUW-P-15_15 Wydział Kierunek
Projektowanie siłowych układów hydraulicznych - opis przedmiotu Informacje ogólne Nazwa przedmiotu Projektowanie siłowych układów hydraulicznych Kod przedmiotu 06.1-WM-MiBM-MiUW-P-15_15 Wydział Kierunek
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY
 PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Elementy elektropneumatycznych układów sterowania Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej
PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Elementy elektropneumatycznych układów sterowania Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej
OM 100s. Przekaźniki nadzorcze. Ogranicznik mocy 2.1.1
 Ogranicznik mocy Przekaźniki nadzorcze OM 100s Wyłącza nadzorowany obwód po przekroczeniu maksymalnego prądu w tym obwodzie. Przykładem zastosowania jest zabezpieczenie instalacji oświetleniowej klatek
Ogranicznik mocy Przekaźniki nadzorcze OM 100s Wyłącza nadzorowany obwód po przekroczeniu maksymalnego prądu w tym obwodzie. Przykładem zastosowania jest zabezpieczenie instalacji oświetleniowej klatek
Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych
 Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych Lp. Nazwa przedmiotu zamówienia ilość 1 Stanowisko dydaktyczne
Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych Lp. Nazwa przedmiotu zamówienia ilość 1 Stanowisko dydaktyczne
(IMD8REL) Instrukcja modułu przekaźnikowego 8x 10A. Model nr: 3561/3501/3490. Wersja dokumentu: 4.0 Data aktualizacji: 26 października 2016
 Instrukcja modułu przekaźnikowego 8x 10A. Model nr: 3561/3501/3490. Wersja dokumentu: 4.0 Data aktualizacji: 26 października 2016") Instrukcja modułu przekaźnikowego 8x 10A (IMD8REL) Model nr: 3561/3501/3490 Wersja dokumentu: 4.0 Data aktualizacji: 26 października 2016 Spółka Inżynierów SIM Sp. z o.o. Adres siedziby firmy: ul. Stefczyka
Instrukcja modułu przekaźnikowego 8x 10A (IMD8REL) Model nr: 3561/3501/3490 Wersja dokumentu: 4.0 Data aktualizacji: 26 października 2016 Spółka Inżynierów SIM Sp. z o.o. Adres siedziby firmy: ul. Stefczyka
Ćwiczenia laboratoryjne z przedmiotu : Napędy Elektryczne, Hydrauliczne i Pneumatyczne
 Laboratorium nr1 Temat: Sterowanie bezpośrednie siłownikami jednostronnego i dwustronnego działania. 1. Wstęp Sterowanie bezpośrednie pracą aktuatora pneumatycznego (siłownika lub silnika) stosuje się
Laboratorium nr1 Temat: Sterowanie bezpośrednie siłownikami jednostronnego i dwustronnego działania. 1. Wstęp Sterowanie bezpośrednie pracą aktuatora pneumatycznego (siłownika lub silnika) stosuje się
13. STEROWANIE SILNIKÓW INDUKCYJNYCH STYCZNIKAMI
 13. STEROWANIE SILNIKÓW INDUKCYJNYCH STYCZNIKAMI 13.1. Cel i zakres ćwiczenia Celem ćwiczenia jest poznanie budowy i działania styczników, prostych układów sterowania pojedynczych silników lub dwóch silników
13. STEROWANIE SILNIKÓW INDUKCYJNYCH STYCZNIKAMI 13.1. Cel i zakres ćwiczenia Celem ćwiczenia jest poznanie budowy i działania styczników, prostych układów sterowania pojedynczych silników lub dwóch silników
AP3.8.4 Adapter portu LPT
 AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
ĆWICZENIE NR 15. Zadanie egzaminacyjne automat wiertarski ze sterownikiem PLC
 ĆWICZENIE NR 15 Zadanie egzaminacyjne automat wiertarski ze sterownikiem PLC W zakładzie stolarskim postanowiono zautomatyzować proces wiercenia otworów w płytach wiórowych. W tym celu zakupiono i zamontowano
ĆWICZENIE NR 15 Zadanie egzaminacyjne automat wiertarski ze sterownikiem PLC W zakładzie stolarskim postanowiono zautomatyzować proces wiercenia otworów w płytach wiórowych. W tym celu zakupiono i zamontowano
Cyfrowe Elementy Automatyki. Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem
 Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
OZNACZENIA NA SCHEMATACH RYSUNKOWYCH. Opracował: Robert Urbanik
 OZNACZENIA NA SCHEMATACH RYSUNKOWYCH Opracował: Robert Urbanik Oznaczenia na schematach kinematycznych- symbole ruchu Tor ruchu prostoliniowego Chwilowe zatrzymanie w położeniu pośrednim Koniec ruchu prostoliniowego
OZNACZENIA NA SCHEMATACH RYSUNKOWYCH Opracował: Robert Urbanik Oznaczenia na schematach kinematycznych- symbole ruchu Tor ruchu prostoliniowego Chwilowe zatrzymanie w położeniu pośrednim Koniec ruchu prostoliniowego
Podstawy Automatyki. Wykład 13 - Wprowadzenie do układów sekwencyjnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
(IMD4REL/N/P) Instrukcja użytkowania modułu przekaźnikowego 4x 16A. Model nr: 2340/2350. Wersja dokumentu: 4.0 Data aktualizacji: 26 października 2016
 Instrukcja użytkowania modułu przekaźnikowego 4x 16A. Model nr: 2340/2350. Wersja dokumentu: 4.0 Data aktualizacji: 26 października 2016") Instrukcja użytkowania modułu przekaźnikowego 4x 16A (IMD4REL/N/P) Model nr: 2340/2350 Wersja dokumentu: 4.0 Data aktualizacji: 26 października 2016 Spółka Inżynierów SIM Sp. z o.o. Adres siedziby firmy:
Instrukcja użytkowania modułu przekaźnikowego 4x 16A (IMD4REL/N/P) Model nr: 2340/2350 Wersja dokumentu: 4.0 Data aktualizacji: 26 października 2016 Spółka Inżynierów SIM Sp. z o.o. Adres siedziby firmy:
ARKUSZ EGZAMINACYJNY
 Zawód: technik mechatronik Symbol cyfrowy: 311[50] 311[50]-01-082 Numer zadania: 1 Czas trwania egzaminu: 240 minut ARKUSZ EGZAMINACYJNY ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE
Zawód: technik mechatronik Symbol cyfrowy: 311[50] 311[50]-01-082 Numer zadania: 1 Czas trwania egzaminu: 240 minut ARKUSZ EGZAMINACYJNY ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 4 Sterowanie sekwencyjne Opracowanie: P. Osiński, M. Stosiak, K. Towarnicki Wrocław 2016 Wstęp teoretyczny Układy sekwencyjne są układami
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 4 Sterowanie sekwencyjne Opracowanie: P. Osiński, M. Stosiak, K. Towarnicki Wrocław 2016 Wstęp teoretyczny Układy sekwencyjne są układami
BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-2 BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski, dr inż. Michał Krępski
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-2 BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski, dr inż. Michał Krępski
PRÓBNY EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE LISTOPAD 2016 CZĘŚĆ PRAKTYCZNA
 Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer zadania: P1 Numer PESEL zdającego* Wypełnia zdający E.18-P1-Próba Czas trwania egzaminu: 180 minut
Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer zadania: P1 Numer PESEL zdającego* Wypełnia zdający E.18-P1-Próba Czas trwania egzaminu: 180 minut
Asynchroniczne statyczne układy sekwencyjne
 Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Czujniki. Czujniki służą do przetwarzania interesującej nas wielkości fizycznej na wielkość elektryczną łatwą do pomiaru. Najczęściej spotykane są
 Czujniki Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Czujniki Czujniki służą do przetwarzania interesującej
Czujniki Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Czujniki Czujniki służą do przetwarzania interesującej
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Projekt pn. Mam zawód mam pracę w regionie jest współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 ED.042.1.2014 Częstochowa, 05.08.2014 r. Zapytanie ofertowe ( wartość do 30 000 ) W związku z realizacją projektu pn. Mam zawód mam pracę w regionie w ramach Programu Operacyjnego Kapitał Ludzki 2007 2013,
ED.042.1.2014 Częstochowa, 05.08.2014 r. Zapytanie ofertowe ( wartość do 30 000 ) W związku z realizacją projektu pn. Mam zawód mam pracę w regionie w ramach Programu Operacyjnego Kapitał Ludzki 2007 2013,
Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap
 Siłowniki Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap Siłowniki membranowe do 2800 cm² Siłowniki elektryczne do 12,5 kn Siłowniki elektrohydrauliczne tłokowe
Siłowniki Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap Siłowniki membranowe do 2800 cm² Siłowniki elektryczne do 12,5 kn Siłowniki elektrohydrauliczne tłokowe
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 216 Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 216 Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer
rh-s6 Nadajnik sześciokanałowy systemu F&Home RADIO.
 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-s6 Nadajnik sześciokanałowy systemu F&Home RADIO. 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-s6 Nadajnik sześciokanałowy systemu F&Home RADIO. 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4
Oznaczenia zacisków norma DIN72552
 Oznaczenia zacisków norma DIN72552 Układ zapłonowy 1 Niskie napięcie (cewka zapłonowa, rozdzielacz zapłonu) 1a 1b Rozdzielacz zapłonu z dwoma obwodami prądowymi do przerywacza zapłonu I do przerywacza
Oznaczenia zacisków norma DIN72552 Układ zapłonowy 1 Niskie napięcie (cewka zapłonowa, rozdzielacz zapłonu) 1a 1b Rozdzielacz zapłonu z dwoma obwodami prądowymi do przerywacza zapłonu I do przerywacza
Szybkie przekaźniki pośredniczące mocne PHU-2 PHU-3 PHU-4
 Szybkie przekaźniki pośredniczące mocne PHU-2 PHU-3 PHU-4 1 1. ZASTOSOWANIE Przekaźniki wyłączające PHU-2, PHU-3, PHU-4 stosowane są do sterowania cewkami wyłączników mocy. Ich wspólną cechą jest bardzo
Szybkie przekaźniki pośredniczące mocne PHU-2 PHU-3 PHU-4 1 1. ZASTOSOWANIE Przekaźniki wyłączające PHU-2, PHU-3, PHU-4 stosowane są do sterowania cewkami wyłączników mocy. Ich wspólną cechą jest bardzo
Elementy Wykonawcze Automatyki. Ćwiczenie 1
 Elementy Wykonawcze Automatyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów Ćwiczenie 1 Układy Sterowania Kombinacyjnego 1 Celem ćwiczenia jest zapoznanie studentów ze sposobem projektowania
Elementy Wykonawcze Automatyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów Ćwiczenie 1 Układy Sterowania Kombinacyjnego 1 Celem ćwiczenia jest zapoznanie studentów ze sposobem projektowania
Presostaty, Seria PM1 Ciśnienie sterujące: -0,9-16 bar mechaniczny Przyłącze elektr.: Wtyczka, M12x1 Mieszek sprężynowy, ustawiany
 843 Wielkość pomiarowa Element sterujący Częstotliwość przyłączalna max. Zabezpieczenie przed nadciśnieniem Temperatura otoczenia min./maks. Temperatura medium min./maks. Medium Wytrzymałość na uderzenia
843 Wielkość pomiarowa Element sterujący Częstotliwość przyłączalna max. Zabezpieczenie przed nadciśnieniem Temperatura otoczenia min./maks. Temperatura medium min./maks. Medium Wytrzymałość na uderzenia
Wyłączniki nożne Obudowa z tworzywa termoplastycznego
 z tworzywa termoplastycznego Zastosowanie Wyłączniki nożne typoszeregu KF przeznaczone są do współpracy m.in. z maszynami w przemyśle tekstylnym i poligraficznym, urządzeniami pakującymi, a także w systemach
z tworzywa termoplastycznego Zastosowanie Wyłączniki nożne typoszeregu KF przeznaczone są do współpracy m.in. z maszynami w przemyśle tekstylnym i poligraficznym, urządzeniami pakującymi, a także w systemach
Jedn. 300 zestyk / zestyk. 500 min V zestyk / cewka. 500 zestyk / osłona cewka / osłona
 Przekaźniki kontaktronowe serii K-9/Nx1 Wyrób zgodny z dyrektywą RoHS PIT-RADWAR S.A. ODDZIAŁ WROCŁAW 50-425 Wrocław, ul. Krakowska 64 tel. (+48) 71/342-65-54, fax (+48) 71/342-58-59 e-mail: sales@dolam.pl
Przekaźniki kontaktronowe serii K-9/Nx1 Wyrób zgodny z dyrektywą RoHS PIT-RADWAR S.A. ODDZIAŁ WROCŁAW 50-425 Wrocław, ul. Krakowska 64 tel. (+48) 71/342-65-54, fax (+48) 71/342-58-59 e-mail: sales@dolam.pl
NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY
 PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Układy pneumatyczne z zaworami sekwencyjnymi Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i Mechatroniki
PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Układy pneumatyczne z zaworami sekwencyjnymi Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i Mechatroniki
F&F Filipowski Sp. J Pabianice, ul. Konstantynowska 79/81 tel KARTA KATALOGOWA
 KARTA KATALOGOWA rh-r1s1t1 LR Nadajnik jednokanałowy, pojedynczy przekaźnik z zewnętrznym czujnikiem do pomiaru temperatury systemu F&Home RADIO. Wersja LR powiększony zasięg. rh-r1s1t1 LR jest odmianą
KARTA KATALOGOWA rh-r1s1t1 LR Nadajnik jednokanałowy, pojedynczy przekaźnik z zewnętrznym czujnikiem do pomiaru temperatury systemu F&Home RADIO. Wersja LR powiększony zasięg. rh-r1s1t1 LR jest odmianą
SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA
 Załącznik nr 6 do SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA Dostawa i montaż wyposażenia w Zespole Szkół Mechaniczno - Elektrycznych w ramach zadania pn.: Modernizacja infrastruktury edukacyjnej wspierająca dostosowanie
Załącznik nr 6 do SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA Dostawa i montaż wyposażenia w Zespole Szkół Mechaniczno - Elektrycznych w ramach zadania pn.: Modernizacja infrastruktury edukacyjnej wspierająca dostosowanie
rh-tsr1s2 DIN LR Przekaźnik roletowy z dwoma wejściami systemu F&Home RADIO. Wersja LR powiększony zasięg.
 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-tsr1s DIN LR Przekaźnik roletowy z dwoma wejściami systemu F&Home RADIO. Wersja LR powiększony zasięg. 95-00
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-tsr1s DIN LR Przekaźnik roletowy z dwoma wejściami systemu F&Home RADIO. Wersja LR powiększony zasięg. 95-00