Nadzór Linii Produkcyjnych. Jacek Pszczółka AiR
|
|
|
- Jolanta Brzezińska
- 10 lat temu
- Przeglądów:
Transkrypt
1 Nadzór Linii Produkcyjnych Jacek Pszczółka AiR

2 Linia Produkcyjna Linia produkcyjna albo linia montażowa zespół stanowisk roboczych (maszynowych, ręcznych lub mieszanych) ugrupowanych według kolejności operacji procesu technologicznego, wg Wikipedii.

3 Łyk historii Początkowo produkcja była jednostkowa. Często 1 osoba wykonywała produkt od początku do końca. Wiązało się to z określonym czasem potrzebnym na realizacje. Wraz z rozwojem technologii nastąpiła rewolucja przemysłowa. Jedną z przyczyn był nagły wzrost zapotrzebowania na produkty których nie dało się wytworzyć w większej ilości. Hala maszynowa w fabryce Hartmana w Chemnitz(1868)

4 I, Robot Maszyny zaczęły wspomagać ludzi w ich pracy, a zarazem przyczyniły się do powstania produkcji seryjnej. Od tej pory pracownicy wykonywali określone zadanie w całym procesie. Tempo produkcji wzrosło, skutkiem czego był wzrost wydajności zakładów co odpowiednio przekładało się za zysk.

5 Konsekwencje tamtych zdarzeń Rewolucja przemysłowa stała się podwaliną tego co obecnie możemy zaobserwować w nowoczesnych fabrykach. Wraz ze wzrostem wydajności produkcji, rozpoczęto proces eliminacji człowieka z procesu produkcji jako elementu roboczego. Lecz taka decyzja poza zyskiem ekonomicznym niosła konsekwencje. Człowiek mimo wszystko posiada zdolność racjonalnego oceniania sytuacji oraz umiejętność analizy na bazie doświadczenia. Maszyna, posiadała wyłącznie algorytm.? =

6 Ekonomia i zysk Porównując człowieka a maszynę pod wieloma względami lepiej wypada robot. Więc problem który został przedstawiony dotyczył uzbrojenia maszyny w zdolności które cechowały człowiek. Sensor - Sentio Czuć Czujnik (sensor) fizyczne bądź biologiczne narzędzie będące najczęściej elementem składowym większego układu, którego zadaniem jest wychwytywanie sygnałów z otaczającego środowiska, rozpoznawanie i rejestrowanie ich.

7

8

9 Nowoczesność Każda nowoczesna linia produkcyjna jest wyposażona w szereg czujników, które nadzorują cały proces, gromadzący i przetwarzający dane, starający utrzymać wszystko w jak najlepszym porządku.

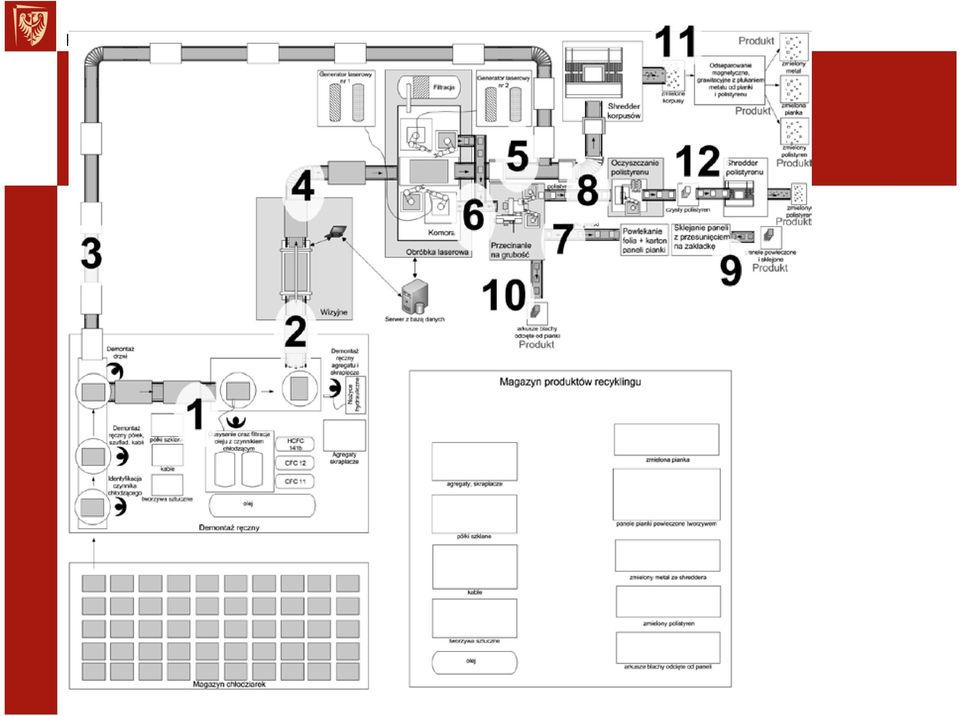
10 Analiza na przykładzie Najłatwiejszym sposobem zrozumienia tego zagadnienia jest prezentacja na przykładzie. Za model posłuży nam fragment linia do recyklingu sprzętu AGD, a dokładniej stanowisko do skanowania laserowego korpusów.

11
12

13 Sekwencje przebiegu procesu na stanowisku do skanowania laserowego dojazd korpusu chłodziarki do stanowiska, transport korpusu na stanowisko, zatrzymanie i pozycjonowanie (za pośrednictwem przenośnika taśmowego oraz układu siłowników pneumatycznych), skanowanie obiektu za pomocą skanera laserowego, przetwarzanie danych pomiarowych w sterowniku PLC, transport korpusu chłodziarki do następnego stanowiska.

14 Schemat blokowy układu sterowania

15 Siłownik pneumatyczny i czujnik odległości

16 Skaner laserowy Na stanowisku testowym jest zamontowany kompletny zestaw napędowy z prowadnicą liniową firmy Festo oraz sterownikiem CMMS-AS-C4-3A. Służy on do przemieszczania skanera laserowego SICK podczas skanowaniu.

17 Krótki opis funkcji sterownika CMMS: Wejścia: DIN4 i DIN5 włączenie zasilania napędów, DIN8 - start, DIN13 - stop, DIN0,1,2,3,10,11 - sześć bitów do wyboru programu, DIN9, DIN12 - wybór trybu pracy (2 bity), DIN6, DIN7 - dwa czujniki krańcowe prowadnicy, Wyjścia programowalne: DOUT0 gotowość do rozpoczęcia operacji, DOUT1 sygnał zakończenia ruchu, DOUT2 sygnał wykonywania operacji, DOUT3 sygnał błędu.

18 Sterowanie przenośnikiem taśmowym Do sterowania parametrami ruchu przenośnika taśmowego wykorzystano falownik LS serii S004 ie5-1 przeznaczony do sterowania trójfazowych asynchronicznych silników indukcyjnych o małej mocy (do 0,4kW).

19 Schemat podłączenia falownika Wejścia P1 P5 są programowalne. Ich funkcjonalność zależna od trybu pracy. Wejście analogowe (prądowe lub napięciowe) służy do sterowania prędkością silnika. Sterownik PLC komunikuje się z falownikiem za pośrednictwem wejść: P1 praca do przodu, P2 praca do tyłu, P3 stop (blokada pracy), AI wejście sygnału analogowego.

20 Komunikacja ze skanerem laserowym SICK skupia się na włączeniu i wyłączeniu skanowania za pomocą wejść binarnych (trigger y) w odpowiednim momencie podczas ruchu skanera. W tym czasie odbierane są dane ze skanera przesyłane za pośrednictwem protokołu TCP/IP i przetwarzane w sterowniku PLC.

21 Układ Sterowania
22 Dziękuję za uwagę Materiały pomocnicze: Publikacja: AUTOMATYZACJA SYSTEMU TRANSPORTOWEGO NA LINII TECHNOLOGICZNEJ DO RECYKLINGU SPRZĘTU AGD Mateusz MUSIAŁ, Edward CHLEBUS, Kamil KROT, Krzysztof CHRAPEK
Rys. 1. Schemat linii do demontażu sprzętu AGD z oznaczeniem głównych odcinków systemu transportowego
 AUTOMATYZACJA SYSTEMU TRANSPORTOWEGO NA LINII TECHNOLOGICZNEJ DO RECYKLINGU SPRZĘTU AGD Mateusz MUSIAŁ, Edward CHLEBUS, Kamil KROT, Krzysztof CHRAPEK Streszczenie: W pracy przedstawiono efekty realizacji
AUTOMATYZACJA SYSTEMU TRANSPORTOWEGO NA LINII TECHNOLOGICZNEJ DO RECYKLINGU SPRZĘTU AGD Mateusz MUSIAŁ, Edward CHLEBUS, Kamil KROT, Krzysztof CHRAPEK Streszczenie: W pracy przedstawiono efekty realizacji
Automatyka i Robotyka. Dr inż. Kamil Krot
 Automatyka i Robotyka Dr inż. Kamil Krot Agenda Kompetencje - oferta badawcza i przemysłowa Projekty zrealizowane Wyposażenie Patenty do komercjalizacji Oferta dla przemysłu projektowanie, integracja i
Automatyka i Robotyka Dr inż. Kamil Krot Agenda Kompetencje - oferta badawcza i przemysłowa Projekty zrealizowane Wyposażenie Patenty do komercjalizacji Oferta dla przemysłu projektowanie, integracja i
Automatyka przemysłowa na wybranych obiektach. mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław
 Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Podłączenie Siłownika elektrycznego. www.kmrnis.p.lodz.pl
 Podłączenie Siłownika elektrycznego www.kmrnis.p.lodz.pl ELEKTRYCZNE SIŁOWNIKI LINIOWE Elektryczne siłowniki liniowe to urządzenia elektromechaniczne, które przekształcają niskie napięcie, pochodzące ze
Podłączenie Siłownika elektrycznego www.kmrnis.p.lodz.pl ELEKTRYCZNE SIŁOWNIKI LINIOWE Elektryczne siłowniki liniowe to urządzenia elektromechaniczne, które przekształcają niskie napięcie, pochodzące ze
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Załącznik nr 5. Opis przedmiotu zamówienia (Specyfikacja Techniczna)
") Załącznik nr 5. Opis przedmiotu zamówienia (Specyfikacja Techniczna) Część 1): Stanowisko do kursu Elektropneumatyka z oprzyrządowaniem 1 szt Stanowisko do ćwiczeń z zakresu pneumatyki i automatyzacji
Załącznik nr 5. Opis przedmiotu zamówienia (Specyfikacja Techniczna) Część 1): Stanowisko do kursu Elektropneumatyka z oprzyrządowaniem 1 szt Stanowisko do ćwiczeń z zakresu pneumatyki i automatyzacji
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2013 CZĘŚĆ PRAKTYCZNA
 Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer zadania: 01 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Numer PESEL
Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer zadania: 01 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Numer PESEL
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T
 Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika wprowadzić dane
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika wprowadzić dane
Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych
 Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych Lp. Nazwa przedmiotu zamówienia ilość 1 Stanowisko dydaktyczne
Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych Lp. Nazwa przedmiotu zamówienia ilość 1 Stanowisko dydaktyczne
Stanowisko do badania współczynnika tarcia
 Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
3.2.3. Optyczny czujnik zbliżeniowy... 80 3.3. Zestawy przekaźników elektrycznych... 81 3.3.1. Przekaźniki zwykłe... 81 3.3.2. Przekaźniki czasowe...
 3 SPIS TREŚCI WYKAZ WAŻNIEJSZYCH SYMBOLI GRAFICZNYCH ELEMENTÓW PNEUMATYCZNYCH I ELEKTROPNEUMATYCZNYCH UŻYTYCH W PODRĘCZNIKU... 11 1. WPROWADZENIE... 15 1.1. Uwagi ogólne... 15 1.2. Podstawy teoretyczne
3 SPIS TREŚCI WYKAZ WAŻNIEJSZYCH SYMBOLI GRAFICZNYCH ELEMENTÓW PNEUMATYCZNYCH I ELEKTROPNEUMATYCZNYCH UŻYTYCH W PODRĘCZNIKU... 11 1. WPROWADZENIE... 15 1.1. Uwagi ogólne... 15 1.2. Podstawy teoretyczne
Zastosowanie Safety Integrated na przykładzie obrabiarki Scharmann Heavycut
 Zastosowanie Safety Integrated na przykładzie obrabiarki Scharmann Heavycut Charakterystyka maszyny - Scharmann Heavycut Rodzaj maszyny wytaczarka Układ sterowania Stary Sinumerik 8 + Sinumerik 840D (MMC
Zastosowanie Safety Integrated na przykładzie obrabiarki Scharmann Heavycut Charakterystyka maszyny - Scharmann Heavycut Rodzaj maszyny wytaczarka Układ sterowania Stary Sinumerik 8 + Sinumerik 840D (MMC
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
SC wentylator boczno-kanałowy
 ZASTOSOWANIE Urządzenia boczno-kanałowe mają zastosowanie w transporcie pneumatycznym. Typowe zastosowania: transport pneumatyczny, poczta pneumatyczna, maszyny graficzne, podnośniki pneumatyczne, wielostopniowe
ZASTOSOWANIE Urządzenia boczno-kanałowe mają zastosowanie w transporcie pneumatycznym. Typowe zastosowania: transport pneumatyczny, poczta pneumatyczna, maszyny graficzne, podnośniki pneumatyczne, wielostopniowe
znak sprawy: RA-TL-Z 33/2015 Formularz Cenowy
 Lp..1 Stanowisko Stanowisko 2.2.1: Wizualizacji i badania czujników pomiarowych sterowania przenośnikiem taśmowym oraz Oświadczenie o realizacji zamówienia zgodnie z wymaganiami Zamawiającego Oświadczam,
Lp..1 Stanowisko Stanowisko 2.2.1: Wizualizacji i badania czujników pomiarowych sterowania przenośnikiem taśmowym oraz Oświadczenie o realizacji zamówienia zgodnie z wymaganiami Zamawiającego Oświadczam,
Podstawy programowania PLC - zadania
 Podstawy programowania PLC - zadania Przemysłowe Systemy Sterowania lato 2011 Przeliczanie jednostek: 1. 11100111 na dec ze znakiem; 2. 01110010 bin na hex; 3. 32 dec na bin; 4. 27 dec na bcd; 5. 01110010
Podstawy programowania PLC - zadania Przemysłowe Systemy Sterowania lato 2011 Przeliczanie jednostek: 1. 11100111 na dec ze znakiem; 2. 01110010 bin na hex; 3. 32 dec na bin; 4. 27 dec na bcd; 5. 01110010
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/ T
 Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/104-110T IE3 Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/104-110T IE3 Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika
Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej
 Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej z wykorzystaniem sterownika PLC Treść zadania Program ma za zadanie sterować turbiną elektrowni wiatrowej, w zależności od
Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej z wykorzystaniem sterownika PLC Treść zadania Program ma za zadanie sterować turbiną elektrowni wiatrowej, w zależności od
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Podstawy Automatyki. Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2016 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2016 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
1. Zbiornik mleka. woda. mleko
 Założenia ogólne 1. Każdy projekt realizuje zespół złożóny z max. 2 osób. 2. Projekt składa się z 3 części: - aplikacji SCADA PRO-2000; - programu sterującego - realizującego obsługę urządzeń w sterowniku;
Założenia ogólne 1. Każdy projekt realizuje zespół złożóny z max. 2 osób. 2. Projekt składa się z 3 części: - aplikacji SCADA PRO-2000; - programu sterującego - realizującego obsługę urządzeń w sterowniku;
TSZ 200. Sterowanie, kontrola i zasilanie systemów wentylacji pożarowej
 Sterowanie, kontrola i zasilanie systemów wentylacji pożarowej sterowanie, kontrola i zasilanie systemów wentylacji pożarowej Tablica przeznaczona jest do sterowania, kontroli i zasilania urządzeń w systemach
Sterowanie, kontrola i zasilanie systemów wentylacji pożarowej sterowanie, kontrola i zasilanie systemów wentylacji pożarowej Tablica przeznaczona jest do sterowania, kontroli i zasilania urządzeń w systemach
Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE. [Prędkości maksymalne]
![Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE. [Prędkości maksymalne]](/thumbs/25/5870352.jpg "Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE. [Prędkości maksymalne]") Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE [Prędkości maksymalne] - Podniesienie Silnika - Przejazd silnika do krańcówki OSI-Y MIN - Cofnięcie Pasa jeśli czujnik optyczny
Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE [Prędkości maksymalne] - Podniesienie Silnika - Przejazd silnika do krańcówki OSI-Y MIN - Cofnięcie Pasa jeśli czujnik optyczny
Załącznik nr 1. Zawód/ podmiot. Nazwa przedmiotu zakupu j. miary ilość. szt. 4
 Załącznik nr 1 Lp. Branża Zawód/ podmiot Nazwa przedmiotu zakupu j. miary ilość 1 2 3 Stanowisko dydaktyczne z pionową płytą montażową ze sterownikiem PLC (min. SIMENS SIMATIC S7-1200 + KTP400 24we/16wy)
Załącznik nr 1 Lp. Branża Zawód/ podmiot Nazwa przedmiotu zakupu j. miary ilość 1 2 3 Stanowisko dydaktyczne z pionową płytą montażową ze sterownikiem PLC (min. SIMENS SIMATIC S7-1200 + KTP400 24we/16wy)
Falowniki Wektorowe Rexroth Fv Parametryzacja
 Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
1. Wykorzystanie sterownika Modicon Micro (03) do sterowania transportem i segregacją półfabrykatów
 do sterowania transportem i segregacją półfabrykatów") 1. Wykorzystanie sterownika Modicon Micro 61200 (03) do sterowania transportem i segregacją półfabrykatów procesu technologicznego 1.1. Wprowadzenie W ćwiczeniu tym obiektem poddanym sterowaniu będzie
1. Wykorzystanie sterownika Modicon Micro 61200 (03) do sterowania transportem i segregacją półfabrykatów procesu technologicznego 1.1. Wprowadzenie W ćwiczeniu tym obiektem poddanym sterowaniu będzie
1. Wstęp. dr inż. Piotr Pawełko / Przed przystąpieniem do realizacji ćwiczenia patrz punkt 4!!!
 Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
JĘZYKI PROGRAMOWANIA STEROWNIKÓW
 JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Laboratorium Maszyny CNC. Nr 4
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 4 Obróbka na frezarce CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 03 stycznia 2011 2 1. Cel ćwiczenia Celem
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 4 Obróbka na frezarce CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 03 stycznia 2011 2 1. Cel ćwiczenia Celem
Serwonapędy AC Serie EDC, EDB, ProNet
 Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
SC wentylator boczno-kanałowy
 ZASTOSOWANIE Urządzenia boczno-kanałowe mają zastosowanie w transporcie pneumatycznym. Typowe zastosowania: transport pneumatyczny, poczta pneumatyczna, maszyny graficzne, podnośniki pneumatyczne, wielostopniowe
ZASTOSOWANIE Urządzenia boczno-kanałowe mają zastosowanie w transporcie pneumatycznym. Typowe zastosowania: transport pneumatyczny, poczta pneumatyczna, maszyny graficzne, podnośniki pneumatyczne, wielostopniowe
Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa
 Technologia napędowa \ Automatyzacja napędów \ Integracja systemowa \ Serwis Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa Lat 2 Zdecentralizowana jednostka napędowa Minimalny wysiłek
Technologia napędowa \ Automatyzacja napędów \ Integracja systemowa \ Serwis Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa Lat 2 Zdecentralizowana jednostka napędowa Minimalny wysiłek
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Laboratorium Elektroniki w Budowie Maszyn
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia
 Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia 1. Wymiń warunki równowagi dowolnego płaskiego układu sił. 2. Co można wyznaczyć w statycznej próbie rozciągani. 3.
Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia 1. Wymiń warunki równowagi dowolnego płaskiego układu sił. 2. Co można wyznaczyć w statycznej próbie rozciągani. 3.
PRODUCT INFORMATION INTERROLL ROLLERDRIVE EC310 SYNONIM INTELIGENTNEJ LOGISTYKI
 PRODUCT INFORMATION z INTERROLL ROLLERDRIVE EC310 SYNONIM INTELIGENTNEJ LOGISTYKI SYSTEMY TRANSPORTU NA CAŁYM NOWA TECHNOLOGIA INTERROLL ROLLERDRIVE EC310 Zalety elektrorolki RollerDrive EC310 są w porównaniu
PRODUCT INFORMATION z INTERROLL ROLLERDRIVE EC310 SYNONIM INTELIGENTNEJ LOGISTYKI SYSTEMY TRANSPORTU NA CAŁYM NOWA TECHNOLOGIA INTERROLL ROLLERDRIVE EC310 Zalety elektrorolki RollerDrive EC310 są w porównaniu
Falowniki serii 650G. Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw
 Falowniki serii 650G Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw AC650G Napędy AC Ogólnego zastosowania Zakres : 0,25 kw 7,5 kw Napędy AC650G idealnie nadają się do zastosowań wymagających dokładnego
Falowniki serii 650G Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw AC650G Napędy AC Ogólnego zastosowania Zakres : 0,25 kw 7,5 kw Napędy AC650G idealnie nadają się do zastosowań wymagających dokładnego
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH AUTOMATYKA I ROBOTYKA Laboratorium: Ćwiczenie 13 Sterowanie procesem identyfikacji i sortowania elementów Opracowanie:
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH AUTOMATYKA I ROBOTYKA Laboratorium: Ćwiczenie 13 Sterowanie procesem identyfikacji i sortowania elementów Opracowanie:
Wykaz ważniejszych symboli graficznych elementów pneumatycznych i elektropneumatycznych użytych w podręczniku 11
 Spis treści Wykaz ważniejszych symboli graficznych elementów pneumatycznych i elektropneumatycznych użytych w podręczniku 11 1. Wprowadzenie 15 Uwagi ogólne 15 Podstawy teoretyczne - Program FluidStudio-P
Spis treści Wykaz ważniejszych symboli graficznych elementów pneumatycznych i elektropneumatycznych użytych w podręczniku 11 1. Wprowadzenie 15 Uwagi ogólne 15 Podstawy teoretyczne - Program FluidStudio-P
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
AP3.8.4 Adapter portu LPT
 AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
Przemienniki częstotliwości seria S100
 Przemienniki częstotliwości seria S100 Charakterystyka: Nowoczesność, uniwersalność, prostota i bardzo korzystny współczynnik jakości do ceny, to główne cechy wyróżniające nową serię, na tle modeli konkurencji.
Przemienniki częstotliwości seria S100 Charakterystyka: Nowoczesność, uniwersalność, prostota i bardzo korzystny współczynnik jakości do ceny, to główne cechy wyróżniające nową serię, na tle modeli konkurencji.
Podstawy Automatyki. Człowiek- najlepsza inwestycja. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
 Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
LABORATORIUM 11, ZESTAW 1 SYNTEZA ASYNCHRONICZNYCH UKŁADÓW SEKWENCYJNYCH, CZ.I
 LABORATORIUM 11, ZESTAW 1 SYNTEZA ASYNCHRONICZNYCH UKŁADÓW SEKWENCYJNYCH, CZ.I Cel zajęć Synteza wybranych asynchronicznych układów sekwencyjnych metodą Huffmana. Materiały do przygotowania Materiały umieszczone
LABORATORIUM 11, ZESTAW 1 SYNTEZA ASYNCHRONICZNYCH UKŁADÓW SEKWENCYJNYCH, CZ.I Cel zajęć Synteza wybranych asynchronicznych układów sekwencyjnych metodą Huffmana. Materiały do przygotowania Materiały umieszczone
Systemy Monitorowania Produkcji EDOCS
 Systemy Monitorowania Produkcji EDOCS Kim jesteśmy? 5 Letnie doświadczenie przy wdrażaniu oraz tworzeniu oprogramowania do monitorowania produkcji, W pełni autorskie oprogramowanie, Firma korzysta z profesjonalnego
Systemy Monitorowania Produkcji EDOCS Kim jesteśmy? 5 Letnie doświadczenie przy wdrażaniu oraz tworzeniu oprogramowania do monitorowania produkcji, W pełni autorskie oprogramowanie, Firma korzysta z profesjonalnego
sterownik VCR v 1. 0
 sterownik VCR v 1.0 1 I. DANE TECHNICZNE...2 1 Budowa...2 2 Dane znamionowe...2 II. INSTRUKCJA UŻYTKOWANIA...3 1 Programowanie sterownika...3 2 Symulacja algorytmu...3 3 Możliwości kalendarza...4 3.1 Wgrywanie
sterownik VCR v 1.0 1 I. DANE TECHNICZNE...2 1 Budowa...2 2 Dane znamionowe...2 II. INSTRUKCJA UŻYTKOWANIA...3 1 Programowanie sterownika...3 2 Symulacja algorytmu...3 3 Możliwości kalendarza...4 3.1 Wgrywanie
W_4 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
ZAUTOMATYZUJ SIĘ. Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka
 ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O nas Firma WIKPER powstała w 2001 roku. Nasza siedziba znajduje się w miejscowości Grębów, województwo podkarpackie.
ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O nas Firma WIKPER powstała w 2001 roku. Nasza siedziba znajduje się w miejscowości Grębów, województwo podkarpackie.
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
ZAUTOMATYZUJ SIĘ. Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka
 ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O Wikper F.H.U. WIKPER Wiktor Peret powstała w 2001 roku. Właścicielem jest Wiktor Peret. Nasza siedziba znajduje się
ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O Wikper F.H.U. WIKPER Wiktor Peret powstała w 2001 roku. Właścicielem jest Wiktor Peret. Nasza siedziba znajduje się
MSBN wentylator promieniowy
 ZASTOSOWANIE Wentylator przeznaczony do systemów transportu zapylonego powietrza. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne, obróbka tworzyw sztucznych),
ZASTOSOWANIE Wentylator przeznaczony do systemów transportu zapylonego powietrza. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne, obróbka tworzyw sztucznych),
Elektryczna regulacja. wysokości stołów roboczych
 Elektryczna regulacja wysokości stołów roboczych Ergonomia w miejscu pracy W elastyczny sposób dostosuj systemy przemysłowe, stoły warsztatowe, przenośniki taśmowe i wszystkie typy stołów roboczych do
Elektryczna regulacja wysokości stołów roboczych Ergonomia w miejscu pracy W elastyczny sposób dostosuj systemy przemysłowe, stoły warsztatowe, przenośniki taśmowe i wszystkie typy stołów roboczych do
Szczegółowy opis laboratorium symulującego system produkcyjny
 Załącznik nr... (pieczęć firmowa Wykonawcy) Szczegółowy opis laboratorium symulującego system produkcyjny Opis pracowni: Laboratorium symulujące system produkcyjny zwane dalej pracownią systemów produkcyjnych
Załącznik nr... (pieczęć firmowa Wykonawcy) Szczegółowy opis laboratorium symulującego system produkcyjny Opis pracowni: Laboratorium symulujące system produkcyjny zwane dalej pracownią systemów produkcyjnych
Próby ruchowe dźwigu osobowego
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
Podstawy PLC. Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń.
 Podstawy PLC Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń. WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program
Podstawy PLC Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń. WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program
Instrukcja obsługi AP3.8.4 Adapter portu LPT
 Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
Sterownik nagrzewnic elektrycznych HE module
 Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
Układ napędowy tramwaju niskopodłogowego na przykładzie układu ENI-ZNAP/RT6N1
 Układ napędowy tramwaju niskopodłogowego na przykładzie układu ENI-ZNAP/RT6N1 1 ZAKRES PROJEKTU ENIKI dla RT6N1 PROJEKT ELEKTRYCZNY OPROGRAMOWANIE URUCHOMIENIE Falownik dachowy ENI-FT600/200RT6N1 2 szt.
Układ napędowy tramwaju niskopodłogowego na przykładzie układu ENI-ZNAP/RT6N1 1 ZAKRES PROJEKTU ENIKI dla RT6N1 PROJEKT ELEKTRYCZNY OPROGRAMOWANIE URUCHOMIENIE Falownik dachowy ENI-FT600/200RT6N1 2 szt.
Dalsze informacje można znaleźć w Podręczniku Programowania Sterownika Logicznego 2 i w Podręczniku Instalacji AL.2-2DA.
 Sterownik Logiczny 2 Moduł wyjść analogowych AL.2-2DA jest przeznaczony do użytku wyłącznie ze sterownikami serii 2 ( modele AL2-**M*-* ) do przetwarzania dwóch sygnałów zarówno w standardzie prądowym
Sterownik Logiczny 2 Moduł wyjść analogowych AL.2-2DA jest przeznaczony do użytku wyłącznie ze sterownikami serii 2 ( modele AL2-**M*-* ) do przetwarzania dwóch sygnałów zarówno w standardzie prądowym
Laboratorium Sterowania Robotów Sprawozdanie
 Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji E.18 Eksploatacja urządzeń i systemów mechatronicznych.
 Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji E.18 Eksploatacja urządzeń i systemów mechatronicznych. Układ elektropneumatyczny z dwoma siłownikami pracującymi
Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji E.18 Eksploatacja urządzeń i systemów mechatronicznych. Układ elektropneumatyczny z dwoma siłownikami pracującymi
System różnicowania ciśnień INNOWACYJNY NAJSZYBSZY NIEZAWODNY INTELIGENTNY UNIWERSALNY
 System różnicowania ciśnień Zestaw wyrobów do różnicowania ciśnienia w systemach kontroli rozprzestrzeniania dymu i ciepła. INNOWACYJNY NAJSZYBSZY NIEZAWODNY INTELIGENTNY UNIWERSALNY Cechy i funkcje: Duży
System różnicowania ciśnień Zestaw wyrobów do różnicowania ciśnienia w systemach kontroli rozprzestrzeniania dymu i ciepła. INNOWACYJNY NAJSZYBSZY NIEZAWODNY INTELIGENTNY UNIWERSALNY Cechy i funkcje: Duży
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Przemiennik częstotliwości falownik 1,5kW 3faz Twerd MFC710
 Dane aktualne na dzień: 28-09-2019 20:03 Link do produktu: https://www.tradelectra.pl/przemiennik-czestotliwosci-falownik-1-5kw-3faz-twerd-mfc710-p-82.html Przemiennik częstotliwości falownik 1,5kW 3faz
Dane aktualne na dzień: 28-09-2019 20:03 Link do produktu: https://www.tradelectra.pl/przemiennik-czestotliwosci-falownik-1-5kw-3faz-twerd-mfc710-p-82.html Przemiennik częstotliwości falownik 1,5kW 3faz
Podstawy Automatyki. Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2015 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2015 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
HBB wentylator promieniowy
 ZASTOSOWANIE Wentylator przeznaczony do systemów transportu nieagresywnego, niewybuchowego i czystego powietrza. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne,
ZASTOSOWANIE Wentylator przeznaczony do systemów transportu nieagresywnego, niewybuchowego i czystego powietrza. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne,
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Falownik MOTOVARIO EM16. Skrócona instrukcja obsługi
 Falownik MOTOVARIO EM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Falownik MOTOVARIO EM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
LFS wentylator chemoodporny
 C WWW DTR CE Art. 1, pkt. 3c (IV) ZASTOSOWANIE Wentylatory LFS znajdują zastosowanie: w dziedzinach wymagających precyzyjnego dawkowania powietrza, w dziedzinach wymagających dobrej odporności na różnego
C WWW DTR CE Art. 1, pkt. 3c (IV) ZASTOSOWANIE Wentylatory LFS znajdują zastosowanie: w dziedzinach wymagających precyzyjnego dawkowania powietrza, w dziedzinach wymagających dobrej odporności na różnego
INVEOR nowy standard w technice napędów pomp i wentylatorów.
 INVEOR nowy standard w technice napędów pomp i wentylatorów. Uniwersalny falownik do typowych silników asynchronicznych o mocy od 0,25 kw do 22kW. Inteligentne połączenia Inteligentna technika napędowa
INVEOR nowy standard w technice napędów pomp i wentylatorów. Uniwersalny falownik do typowych silników asynchronicznych o mocy od 0,25 kw do 22kW. Inteligentne połączenia Inteligentna technika napędowa
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2013 KRYTERIA OCENIANIA
 Układ graficzny CKE 01 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 01 KRYTERIA OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Eksploatacja
Układ graficzny CKE 01 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 01 KRYTERIA OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Eksploatacja
Układ napędowy pomp wody pochłodniczej kotła w PKN Orlen.
 Układ napędowy pomp wody pochłodniczej kotła w PKN Orlen. Zadaniem systemu jest sterowanie pracą kaskady trzech identycznych pomp wody pochłodniczej napędzanych silnikami o mocy 37 kw. Pompy pracują w
Układ napędowy pomp wody pochłodniczej kotła w PKN Orlen. Zadaniem systemu jest sterowanie pracą kaskady trzech identycznych pomp wody pochłodniczej napędzanych silnikami o mocy 37 kw. Pompy pracują w
Oferta ogólna. Frezarko Grawerki : CNC MFG4025P Producent : Jubilex, Polska. Dotyczy: Oferta ogólna z dnia 2014-04-02
 Oferta ogólna Dotyczy: Frezarko Grawerki : CNC MFG4025P Producent : Jubilex, Polska Indywidualna konfiguracja oraz maksymalna wydajność dzięki szerokiemu wachlarzowi opcji Interaktywne programowanie dla
Oferta ogólna Dotyczy: Frezarko Grawerki : CNC MFG4025P Producent : Jubilex, Polska Indywidualna konfiguracja oraz maksymalna wydajność dzięki szerokiemu wachlarzowi opcji Interaktywne programowanie dla
Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania
 1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
Ćwiczenie 3 Falownik
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
UTILITYLINE W komplecie Dzielone imadło frontowe W komplecie Transporter wiórów W komplecie Lampa oświetleniowa W komplecie Stół załadowczy
 FOR ALL YOUR SAWING NEEDS! Automatyczne i półautomatyczne przecinarki taśmowe UTILITYLINE W komplecie Dzielone imadło frontowe W komplecie Transporter wiórów W komplecie Lampa oświetleniowa W komplecie
FOR ALL YOUR SAWING NEEDS! Automatyczne i półautomatyczne przecinarki taśmowe UTILITYLINE W komplecie Dzielone imadło frontowe W komplecie Transporter wiórów W komplecie Lampa oświetleniowa W komplecie
Uniwersalny, modułowy system paletyzujący
 Uniwersalny, modułowy system paletyzujący Wstęp Układy pozycjonujące mogą być sterowane z głównego PLC kontrolującego całość procesu lub za pomocą lokalnego sterownika, który poprzez wejścia/wyjścia komunikuje
Uniwersalny, modułowy system paletyzujący Wstęp Układy pozycjonujące mogą być sterowane z głównego PLC kontrolującego całość procesu lub za pomocą lokalnego sterownika, który poprzez wejścia/wyjścia komunikuje
SFC zawiera zestaw kroków i tranzycji (przejść), które sprzęgają się wzajemnie przez połączenia
, które sprzęgają się wzajemnie przez połączenia") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
REGULATORY TRÓJFAZOWE PRĘDKOŚCI OBROTOWEJ Z SERII FCS FIRMYY CAREL
 REGULATORY TRÓJFAZOWE PRĘDKOŚCI OBROTOWEJ Z SERII FCS FIRMYY CAREL Charakterystyka Regulatory z serii FCS wyposażone są w trójfazową elektroniczną napięciową regulację działającą na zasadzie obcinania
REGULATORY TRÓJFAZOWE PRĘDKOŚCI OBROTOWEJ Z SERII FCS FIRMYY CAREL Charakterystyka Regulatory z serii FCS wyposażone są w trójfazową elektroniczną napięciową regulację działającą na zasadzie obcinania
WYPOSAŻENIE ZESPOŁU SZKÓŁ NR 1 W BOCHNI PAKIET NR I - WYPOSAŻENIE PRACOWNI ELEKTRYCZNYCH CZ. I
 Modernizacja i wyposażenie bazy dydaktycznej szkolnictwa zawodowego dla Zespołu Szkół Nr 1, Zespołu Szkół Nr 2 oraz Zespołu Szkół Nr 3 w Bochni w ramach Małopolskiego Regionalnego Programu Operacyjnego
Modernizacja i wyposażenie bazy dydaktycznej szkolnictwa zawodowego dla Zespołu Szkół Nr 1, Zespołu Szkół Nr 2 oraz Zespołu Szkół Nr 3 w Bochni w ramach Małopolskiego Regionalnego Programu Operacyjnego
W RAMACH STUDIÓW NIESTACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ
 POLITECHNIKA WARSZAWSKA SPECJALNOŚĆ AUTOMATYKA PRZEMYSŁOWA W RAMACH STUDIÓW NIESTACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ Instytut Elektrotechniki Teoretycznej
POLITECHNIKA WARSZAWSKA SPECJALNOŚĆ AUTOMATYKA PRZEMYSŁOWA W RAMACH STUDIÓW NIESTACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ Instytut Elektrotechniki Teoretycznej
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
BN wentylator promieniowy
 WWW 8 C ZASTOSOWANIE Wentylatory przeznaczone do systemów transportu nieagresywnych i niewybuchowych gazów. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne,
WWW 8 C ZASTOSOWANIE Wentylatory przeznaczone do systemów transportu nieagresywnych i niewybuchowych gazów. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne,
BE wentylator promieniowy
 WWW 8 C ZASTOSOWANIE Wentylatory przeznaczone do systemów transportu nieagresywnych i niewybuchowych gazów. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne,
WWW 8 C ZASTOSOWANIE Wentylatory przeznaczone do systemów transportu nieagresywnych i niewybuchowych gazów. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne,
Indukcyjny czujnik kąta z wyjściem analogowym RI360P1-DSU35-ELIU5X2-H1151
 Obudowa prostopadłościenna DSU35 Tworzywo sztuczne PP-GF30-VO Wykrywanie pozycji kątowych od 0 do 360 W zestawie element pozycjonujący P1- Ri-DSU35 Wskazania LED zakresu pomiarowego Programowalny zakres
Obudowa prostopadłościenna DSU35 Tworzywo sztuczne PP-GF30-VO Wykrywanie pozycji kątowych od 0 do 360 W zestawie element pozycjonujący P1- Ri-DSU35 Wskazania LED zakresu pomiarowego Programowalny zakres