Systemy Czasu Rzeczywistego (SCR)
|
|
|
- Bogusław Mazurkiewicz
- 6 lat temu
- Przeglądów:
Transkrypt

1 SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 10 i 11: Modelowanie systemu sterującego z wykorzystaniem modelu maszyny stanowej, przybornik StateFlow Matlab/Simulink szybkie wprowadzenie WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok II, semestr IV dr inż. Tomasz Rutkowski 2017
2 System Czasu Rzeczywistego - model bodziec-reakcja SCR
3 System Czasu Rzeczywistego - model bodziec-reakcja (odpowiedź) Na podstawie bodźca otrzymanego z otoczenia, system musi wygenerować odpowiednią reakcję (odpowiedź systemu) Bodźce mogą mieć charakter synchroniczny, asynchroniczny lub mieszany (co ma bezpośredni wpływ na wybór typu systemu sterującego) Zachowanie systemu czasu rzeczywistego można zdefiniować poprzez: zidentyfikowanie i zestawienie bodźców, które może otrzymać odpowiednie odpowiedzi (reakcje) skojarzone z danymi bodźcami czasu, w którym należy przetworzyć dane bodźce SCR
4 System Czasu Rzeczywistego - model bodziec-reakcja (odpowiedź) Detektor Detektor Detektor Detektor System Sterujący Czasu Rzeczywistego Efektor Efektor Efektor Efektor SCR
5 System Czasu Rzeczywistego - model bodziec-reakcja (odpowiedź) Detektor Bodziec Sterowanie detektorem Przetwarzanie danych (odpowiednie obliczenia) Sterowanie efektorem Reakcja Efektor SCR
6 System Czasu Rzeczywistego - model bodziec-reakcja (odpowiedź) Z każdym rodzajem detektora kojarzy się proces sterowania detektorem Procesy przetwarzania danych wyznaczają oczekiwaną odpowiedź na bodźce otrzymane przez system Procesy sterowania efektorami zarządzają działaniem efektorów Model w przedstawionej postaci umożliwia szybkie odbieranie danych od detektorów (zanim będą gotowe następne dane wejściowe), późniejsze ich przetwarzanie i oddziaływanie na proces przez efektory SCR
7 System Czasu Rzeczywistego - podstawowe wymogi projektowe Część procesu projektowania systemu polega na podjęciu decyzji, które funkcje systemu będą zaimplementowane przez oprogramowanie, a które przez sprzęt (np. te związane z ograniczeniami czasowymi) Proces projektowania systemu może więc zarówno obejmować projektowanie odpowiedniego sprzętu jak i projektowanie oprogramowania czasu rzeczywistego SCR
8 System Czasu Rzeczywistego - podstawowe kroki procesu projektowania 1. Zidentyfikować bodźce, które system musi przetwarzać oraz skojarzone z nimi reakcje 2. Dla każdego bodźca i związanej z nim reakcji zidentyfikować wymagania czasowe, które dotyczą przetwarzania zarówno bodźca, jak i reakcji 3. Pogrupować bodźce i reakcje w kilku procesach współbieżnych SCR
9 System Czasu Rzeczywistego - podstawowe kroki procesu projektowania 4. Dla każdego bodźca i reakcji zaprojektować algorytmy do przeprowadzania koniecznych obliczeń (projekty algorytmów często trzeba opracować we wczesnej fazie procesu, aby poznać ilość przetwarzania i czas potrzebny do wykonania niezbędnych obliczeń) 5. Zaprojektować system szeregujący, który zapewni, że procesy będą uruchamiane w odpowiednich chwilach, tak by spełnić ograniczenia czasowe 6. Zintegrować system pod kontrolą modułu wykonawczego SCR
10 Modelowanie systemu sterującego z wykorzystaniem modelu maszyny stanowej (automat skończony) SCR
11 Model maszyny stanowej Służy do opisywania zachowania systemu dynamicznego, gdy reaguje on na wewnętrzne lub zewnętrzne zdarzenia (bodźce) Model maszyny stanowej zawiera skończoną liczbę stanów i skończoną liczbę przejść pomiędzy tymi stanami, które następują w wyniku odpowiednich zdarzeń SCR 2017 Model przedstawiany w postaci diagramu obrazuje maszynę stanową w postaci odpowiedniego grafu złożonego Modele maszyn stanowych są integralna częścią metod projektowania systemów czasu rzeczywistego (głównie modelowanie zachowania systemów interaktywnych typu bodziec-reakcja) 11
12 Model maszyny stanowej Stan obiektu zestaw wszystkich wartości atrybutów (działań, akcji) oraz aktualnych powiązań danego obiektu z innymi obiektami, zmianę aktualnego stanu na inny może spowodować zajście pewnego zdarzenia. Zdarzenie to specyfikacja zjawiska, które zachodzi w czasie i przestrzeni w maszynie stanowej, zjawiska które jest związane z wystąpieniem bodźca, który może uruchomić przejście między odpowiednimi stanami. Zdarzeniami mogą być sygnały, wywołania, upływ czasu czy zmiana stanu. Przejście to związek między dwoma stanami, wskazujący, że obiekt znajdujący się w pierwszym stanie i wykonywujący pewne akcje, przejdzie do drugiego stanu i wykonywania związanych z nim akcji, zawsze gdy zajdzie określone zdarzenie i będą spełnione określone warunki. SCR
13 Model maszyny stanowej Automaty skończone reagują na określone sygnały zewnętrzne reprezentowane przez litery alfabetu, pewnego skończonego zbioru symboli: np. {0,1} czy, {ON, OFF} Automatem skończonym nazywamy system składający się z pięciu następujących elementów (, S, s 0, δ, F): to alfabet automatu S to skończony, niepusty zbiór wszystkich stanów automatu s 0 to stan początkowy, taki że: s 0 ϵ S δ to funkcja przejścia, taka że: δ: S x S F to skończony, niepusty zbiór stanów końcowych automatu SCR
14 Reprezentacja maszyny stanowe: Model maszyny stanowej graf działania prostego sygnalizatora świetlnego start ε ε zielone żółte czerwone Σ = [ε], np. zdarzenie -> upływ czasu S = [zielone, żółte, czerwone] S 0 = [zielone] δ = [zielone/ε żółte, żółte/ε czerwone] F = [czerwone] SCR
15 Reprezentacja maszyny stanowe: Model maszyny stanowej graf działania prostego sygnalizatora świetlnego start ε ε zielone żółte czerwone ε sekwencja δ = [zielone/ε żółte, żółte/ε czerwone, czerwone/ε zielone] SCR
16 Reprezentacja maszyny stanowej: Model maszyny stanowej graf działania prostego odtwarzacza video jakie stany? jakie przejścia? SCR
17 Przykład 1 SCR
18 Model maszyny stanowej - przykład układu przełącznika kolorowych świateł Klasyczny algorytm blokowy BT1 Zdarzenie przyciśnięcie przycisku w przód BT2 Zdarzenie przyciśnięcie przycisku w tył SCR 2017 Źródło: [2] 18


19 Model maszyny stanowej - przykład układu przełącznika kolorowych świateł Klasyczny algorytm blokowy Automat skończony BT1 Zdarzenie przyciśnięcie przycisku w przód BT2 Zdarzenie przyciśnięcie przycisku w tył SCR 2017 Źródło: [2] 19

20 Model maszyny stanowej - przykład układu przełącznika kolorowych świateł Stany i warunki przejścia Macierz przejść SCR 2017 Źródło: [2] 20
21 Model maszyny stanowej Przykładowa realizacja w języku C SCR
22 Przykład 2 SCR
23 Model maszyny stanowej - opis stanów prostej kuchenki mikrofalowej Stan Opis Oczekiwanie Kuchenka czeka na dane wejściowe. Wyświetlacz pokazuje aktualną godzinę. Połowa mocy Pełna moc Ustawienie czasu Niegotowy Gotowy Działanie Moc kuchenki ustawiono na 500 watów. Wyświetlacz pokazuje napis Połowa mocy. Moc kuchenki ustawiono na 1000 watów. Wyświetlacz pokazuje napis Pełna moc. Czas trwania gotowania jest ustawiany na wartość wprowadzoną przez użytkownika. Wyświetlacz pokazuje wybrany czas gotowania i jest aktualizowany w miarę wprowadzania danych. Kuchenka nie może działać ze względów bezpieczeństwa. Wewnętrzne światło kuchenki jest włączone. Wyświetlacz pokazuje napis Niegotowy. Kuchenka jest gotowa do działania. Wewnętrzne światło jest wyłączone. Wyświetlacz pokazuje napis Gotowy. Kuchenka działa. Wewnętrzne światło jest włączone. Wyświetlacz odlicza zmniejszający się czas pozostały do zakończenia gotowania. Po zakończeniu brzęczyk włącza się na 5 sekund. Światło kuchenki jest wtedy włączone. Wyświetlacz pokazuje napis Gotowanie zakończone w czasie działania brzęczka. SCR 2017 Źródło: [3] 23
24 Model maszyny stanowej - opis działania prostej kuchenki mikrofalowej Notacja UML Sprawdzenie do: sprawdź stan Działanie OK Czas Gotowanie do: praca generatora Awaria talerza obrotowego Alarm do: wyświetlaj zdarzenie Awaria źródła fal Koniec czasu Wykonano do: włącz brzęczek na 5 sekund Niegotowy Otworzono drzwiczki Oczekiwanie Zatrzymaj SCR 2017 Źródło: [3] 24
25 Model maszyny stanowej - prosta kuchenka mikrofalowa Pełna moc Pełna moc do: ustaw moc = 1000 Notacja UML Połowa mocy Oczekiwanie do: wyświetlaj godzinę Połowa mocy Pełna moc Połowa mocy do: ustaw moc = 500 Stoper Stoper Ustawienie czasu do: odczytaj liczbę Exit: ustaw czas Otworzono drzwiczki Niegotowy do: wyświetlaj Czekam Zamknięto drzwiczki Liczba Zamknięto drzwiczki Początek Działanie do: podgrzewanie Otworzono drzwiczki Gotowy do: wyświetlaj Gotowy Zatrzymaj Oczekiwanie do: wyświetlaj godzinę SCR 2017 Źródło: [3] 25
26 Model maszyny stanowej - opis bodźców dla prostej kuchenki mikrofalowej Bodziec Połowa mocy Pełna moc Stoper Liczba Otworzono drzwiczki Zamknięto drzwiczki Początek Zatrzymaj Opis Użytkownik nacisnął przycisk Połowa mocy Użytkownik nacisnął przycisk Pełna moc Użytkownik nacisnął przycisk Stoper Użytkownik nacisnął przycisk z liczbą Przełącznik drzwiowy jest niezamknięty Przełącznik drzwiowy jest zamknięty Użytkownik nacisnął przycisk Początek Użytkownik nacisnął przycisk Zatrzymaj SCR 2017 Źródło: [3] 26
27 Model maszyny stanowej - opis reakcji dla prostej kuchenki mikrofalowej Reakcja Opis?? SCR
28 Przykład 3 SCR
29 Prosty wojownik mini-sumo SCR





30 Prosty wojownik mini-sumo Zestaw nadajników i odbiorników podczerwieni pełniący funkcję czujników obecności przeciwnika Zestaw czujników w postaci modułów odbiciowych wykrywających białą linię (z czujnikiem podczerwieni) SCR
31 Prosty wojownik mini-sumo Zastanówmy się jakie są: - bodźce? - detektory? - efektory? - reakcje? SCR
32 Model maszyny stanowej - prosty wojownik mini-sumo Atak wykrycie krawędzi ringu przeciwnik bezpośrednio przed pojazdem Ucieczka od krawędzi ringu (dohyo) wykrycie krawędzi ringu Namierzenie przeciwnika manewr oddalający od krawędzi ringu wykrycie krawędzi ringu Poszukiwanie przeciwnika nie wykryto przeciwnika wykryto przeciwnika start SCR
33 Model maszyny stanowej - opis stanów prostego wojownika mini-sumo STAN OPIS PROPOZYCJE AKCJI (REAKCJI) Ucieczka od krawędzi ringu (dohyo) Poszukiwanie przeciwnika Stan w który wchodzi pojazd gdy jeden z czujników sygnalizuje wykrycie krawędzi ringu (dohyo) czujnik białej linii. Pojazd powinien podjąć akcje związaną z utrzymaniem się na ringu, np.: skierowanie pojazdu do środka ringu. Stan w którym podejmowane są akcje mające na celu zlokalizowanie przez pojazd przeciwnika na ringu. Pojazd powinien podjąć akcje związaną ze skanowaniem swojego otoczenia w celu wykrycia przeciwnika (sygnał z radaru) np.: jazda przed siebie z cykliczną zmianą kierunku czy jazda po łukach. jeżeli wykryto krawędź ringu z tyłu pojazdu: jazda do przodu przejście do stanu Poszukiwania przeciwnika jeżeli wykryto krawędź ringu z tyłu pojazdu: wyznaczenie kierunku obrotu pojazdu (w lewo czy w prawo) wykonanie pełnego obrotu o 180 (zawracanie) przejście do stanu Poszukiwania przeciwnika realizacja dostępnych algorytmów pozwalających wykrycie przeciwnika: jazda przed siebie z cykliczną zmianą kierunku ruchu jazda po łukach jeżeli wykryto krawędź ringu to przejdź do stanu Ucieczki od krawędzi ringu jeżeli wykryto przeciwnika w bezpośrednim otoczeniu pojazdu to przejdź do stanu Namierzania przeciwnika Namierzenie przeciwnika (start) Atak Stan w którym pojazd wykrył przeciwnika w swoim otoczeniu (sygnał z radaru). Pojazd powinien podjąć akcje mające na celu zwrócenie się przodem do przeciwnika. Stan w którym przeciwnik został zlokalizowany i znajduje się bezpośrednio z przodu pojazdu (sygnał z radaru). Pojazd powinien ruszyć przed siebie z pełną mocą silników by wypchnąć przeciwnika z ringu. jeżeli przeciwnik zlokalizowany z prawej strony to obrót w prawo jeżeli przeciwnik zlokalizowany z lewej strony to obrót w lewo jeżeli przeciwnik zlokalizowany z tyłu to pełen obrotu o 180 jeżeli przeciwnik zlokalizowany bezpośrednio przed pojazdem to przejdź do stanu Atak jeżeli wykryto krawędź ringu to przejdź do stanu Ucieczki od krawędzi ringu w przeciwnym wypadku przejdź do stanu Poszukiwania przeciwnika jazda do przodu z pełną mocą silników jeżeli wykryto krawędź ringu to przejdź do stanu Ucieczki od krawędzi ringu SCR
34 Model maszyny stanowej - przykład fragmentu programu w C dla prostego wojownika mini-sumo Atak Namierzanie przeciwnika Poszukiwanie przeciwnika SCR
35 Przykład 4 SCR
36 Modelowanie systemu - prosty system antywłamaniowy Detektory ruchu Detektory drzwiowe Centralka alarmu Zewnętrzne centrum monitoringu Syrena Syntezator mowy Automat dzwoniący SCR 2017 Źródło: [3] 36
37 Model maszyny stanowej - bodźce/reakcje prostego systemu antywłamaniowego Bodziec/reakcja Wymagania czasowe Przerwanie zanik Przełączenie na zasilanie zapasowe musi być ukończone po najwyżej zasilania 50ms Alarm drzwiowy Alarm okienny Detektor ruchu Sygnał dźwiękowy Włączenie świateł Każdy detektor drzwiowy musi być odpytywany co najmniej dwa razy na sekundę Każdy detektor okienny musi być odpytywany co najmniej dwa razy na sekundę Każdy detektor ruchu powinien być odpytywany co najmniej dwa razy na sekundę Sygnał dźwiękowy musi być włączony po upływie najwyżej 1 sekundy od alarmu wywołanego przez detektor Światła powinny być włączone po upływie najwyżej 1/2 sekundy od alarmu wywołanego przez detektor Komunikacja Wezwanie policji przez telefon należy rozpocząć po upływie najwyżej 2 sekund od alarmu wywołanego przez detektor Syntezator mowy Komunikat z syntezatora powinien być dostępny po upływie najwyżej 4 sekund od alarmu wywołanego przez detektor SCR 2017 Źródło: [3] 37
38 Architektura procesowa prostego systemu antywłamaniowego 10 Hz 10 Hz 10 Hz Źródło: [3] Proces detektorów ruchu Proces detektorów drzwiowych Proces detektorów okiennych Stan detektorów 200 Hz Stan detektorów Stan detektorów Proces monitorowania budynku System alarmowy Przerwanie braku zasilania Proces przełączania zasilania Kontroler budynku System alarmowy Numer pokoju Proces systemu alarmowego Numer pokoju System alarmowy Proces komunikacyjny Komunikat alarmowy Proces sygnalizacji Proces sterowania Numer pokoju Proces syntezatora dźwiękowej światłami mowy SCR
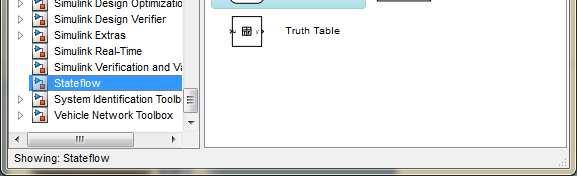
39 Modelowanie maszyny stanowej z wykorzystaniem przybornika StateFlow Matlaba/Simulinka SCR
40 Przykład 1 - prosty model - SCR

41 Przykład 1 SCR
42 Przykład 1 Stan obiektu??? Zdarzenie??? Przejście??? SCR

43 Przykład 1 SCR
44 Przykład 1 SCR

45 Przykład 1 SCR

46 Przykład 1 SCR

47 Przykład 1 SCR


48 Przykład 1 Krok 1: Definiowanie nowego grafu automatu (wystarczy kliknąć dwa razy na odpowiednim bloku) SCR
49 Przykład 1 Wykorzystując dostępne narzędzia edytora można budować grafy odpowiednich automatów skończonych SCR

50 Przykład 1 Krok 2: Definiowanie nowego stanu SCR
51 Przykład 1 Krok 2: Definiowanie nowego stanu nadanie odpowiedniej nazwy powiązanej np. z działaniem systemu, które będzie bezpośrednio zdefiniowane w tym stanie SCR
52 Przykład 1 Krok 2: Definiowanie nowego stanu odpowiednim stanom nadano nazwy ON i OFF, które symbolicznie wskazują działania w każdym z tych stanów SCR
53 Przykład 1 Krok 2: Definiowanie przejść pomiędzy stanami pierwsze przejście (strzałka) wskazuje przejście ze stanu ON do stanu OFF, należy jeszcze zdefiniować drugie przejście (poprowadzić strzałkę) pomiędzy stanem OFF a stanem ON SCR
54 Przykład 1 Krok 3: Definiowanie warunków przejść pomiędzy stanami klikając bezpośrednio na dane przejście można bezpośrednio zdefiniować warunek (wpisać), który je umożliwia (kliknięcie na daną strzałkę); w tym przypadku wpisano u>0 zakłada się że dalej zmienną u zdefiniuje się jako zmienną wejściową SCR
55 Przykład 1 Krok 3: Definiowanie warunków przejść pomiędzy stanami klikając bezpośrednio na drugie przejście definiuje się kolejny warunek; w tym przypadku wpisano u<0 również zakłada się że zmienną u zdefiniuje się jako zmienną wejściową SCR
56 Przykład 1 Krok 4: Definiowanie stanu ustawiając kursor za nazwą stanu i wciskając enter, można zdefiniować zestaw działań w danym stanie (powiązań z innymi obiektami) SCR
, następnie wciśnięto enter, zakłada się że y to zmienna wyjściowa, która zostanie zdefiniowana dalej) SCR 2017")
57 Przykład 1 Krok 4: Definiowanie stanu ON ustawiając kursor za nazwą stanu i wciskając enter, można zdefiniować zestaw działań w danym stanie; w tym przypadku wpisano y=1; (koniec linii kończy się średnikiem), następnie wciśnięto enter, zakłada się że y to zmienna wyjściowa, która zostanie zdefiniowana dalej) SCR
58 Przykład 1 Krok 4: Definiowanie stanu ON przyciśniecie enter (z poprzedniego kroku) powoduje dodanie wpisu entry: oznaczające że w tym stanie zmienna y przyjmie wartość 1 SCR
59 Przykład 1 Krok 5: Definiowanie stanu OFF w podobny sposób do poprzedniego kroku, definiuje się stan OFF, w tym przypadku wpisuje się y=-1 SCR
60 Przykład 1 Krok 6: Definiowanie stanu początkowego zakłada się że stanem początkowym będzie stan ON SCR
61 Przykład 1 Krok 6: Definiowanie stanu początkowego zakłada się że stanem początkowym będzie stan ON SCR
62 Przykład 1 Krok 7: Definiowanie wejścia do automatu z poziomu Simulinka SCR


63 Przykład 1 Krok 7: Definiowanie wejścia do automatu z poziomu Simulinka definicja zmiennej u SCR


64 Przykład 1 Krok 8: Definiowanie wyjścia z automatu do Simulinka SCR


65 Przykład 1 Krok 8: Definiowanie wyjścia z automatu do Simulinka definicja zmiennej y SCR
66 Przykład 1 Krok 9: Koniec definicji automatu wracamy na poziom Simulinka SCR
67 Przykład 1 Krok 10: Blok grafu automatu ma teraz wejście i wyjście, które zostaną wykorzystane do połączeń z pozostałymi blokami Simulinka SCR
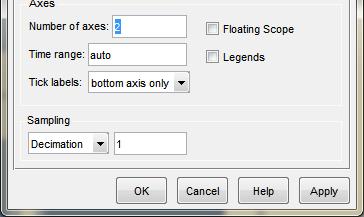
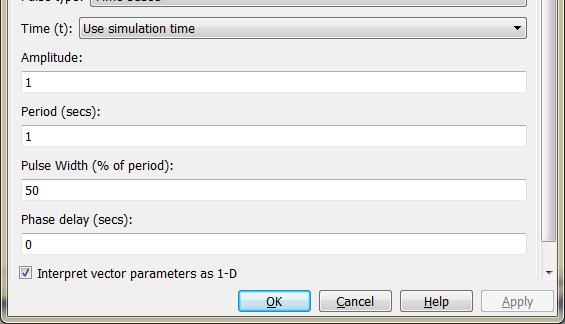
68 Przykład 1 Krok 11: Ustawienie parametrów symulacji SCR


69 Przykład 1 Krok 11: Ustawienie parametrów symulacji ustawienie odpowiednie solvera, w przypadku symulacji w czasie rzeczywistym, należy wybrać odpowiedni kompilator w Code Generation np. związany z przybornikiem Simulink Desktop Real-Time SCR
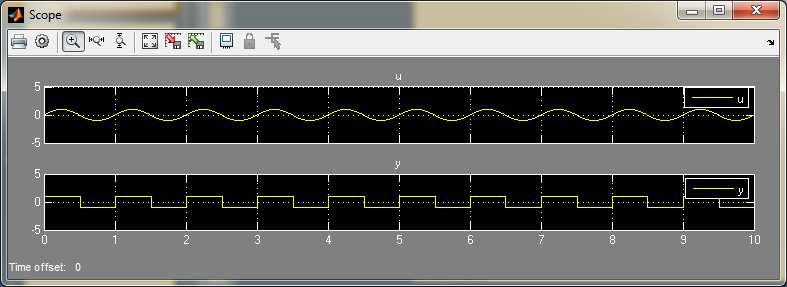
70 Przykład 1 Krok 12: Symulacja działania zaprojektowanego automatu i analiza rezultatów SCR
71 Przykład 1 Krok 12: Symulacja działania zaprojektowanego automatu i analiza rezultatów SCR
72 Przykład 1 DEMO Symulacja w trybie NORMAL Symulacja w czasie rzeczywistym SLDRT SCR
73 Przykład 2 - układ sekwencyjny: prosty sygnalizator świetlny- SCR
74 Przykład 2 SCR
75 Przykład 2 Stan obiektu??? Zdarzenie??? Przejście??? SCR
76 Przykład 2 SCR

77 Przykład 2 SCR

78 Przykład 2 SCR
79 Przykład 2 SCR

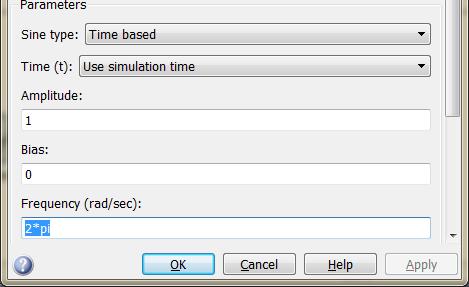
80 Przykład 2 Definiowanie wejścia związanego z generatorem czasu SCR


81 Przykład 2 Definiowanie wejścia związanego z generatorem czasu SCR
82 Przykład 2 SCR

83 Przykład 2 SCR

84 Przykład 2 SCR

85 Przykład 2 SCR
86 Przykład 2 SCR

87 Przykład 2 SCR
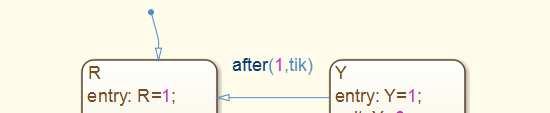
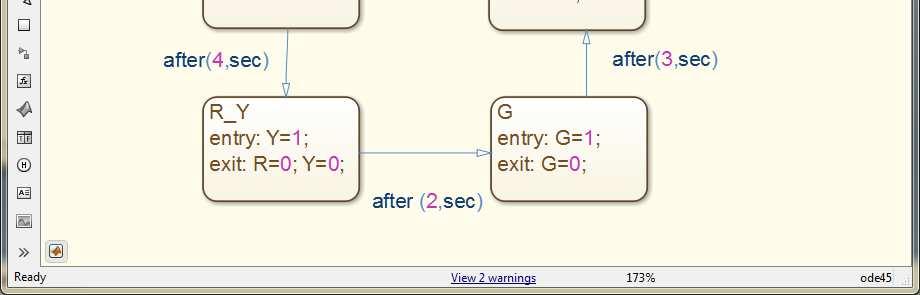
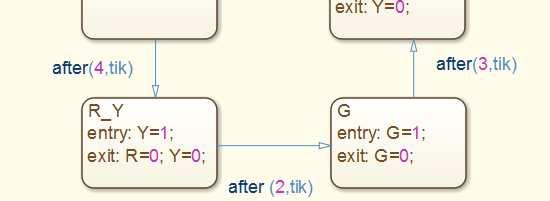
88 Przykład 2 SCR

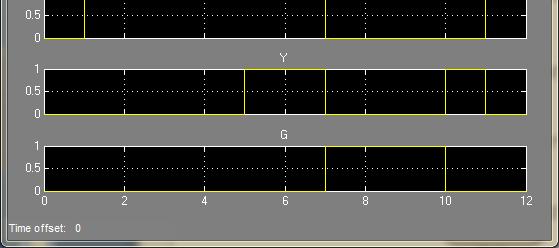
89 R R+Y G Y R SCR
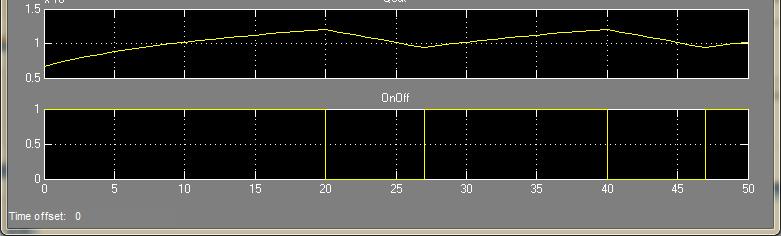
90 Przykład 3 - dwustanowy regulator poziomu medium w zbiorniku SCR
91 Przykład 3 Q we (t) hmax h(t) hmin A Q wy (t) SCR
92 Przykład 3 Stan obiektu??? Zdarzenie??? Przejście??? SCR
93 Przykład 3 SCR

94 Przykład 3 SCR
95 Przykład 3 SCR

96 Przykład 3 SCR
97 Przykład 3 SCR
98 Przykład 3 SCR
99 Przykład 3 SCR
100 Przykład 3 SCR

101 Przykład 3 SCR
102 Bibliografia: [1] T. Szmuc, G.Motet(2000). Specyfikacja i projektowanie oprogramowania systemów czasu rzeczywistego. Uczelniane Wydawnictwa Naukowo-Dydaktyczne, Kraków. [2] Elektronika praktyczna 1/2010. [3] I. Sommervill(2003). Inżynieria oprogramowania. WNT. [4] SCR
103 Dziękuję za uwagę!!! SCR
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Podstawy inżynierii oprogramowania oraz inżynierii systemów sterowania czasu rzeczywistego (wybrane zagadnienia) Politechnika Gdańska Wydział Elektrotechniki i Automatyki
Systemy Czasu Rzeczywistego (SCR) Podstawy inżynierii oprogramowania oraz inżynierii systemów sterowania czasu rzeczywistego (wybrane zagadnienia) Politechnika Gdańska Wydział Elektrotechniki i Automatyki
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Ustawienia ogólne. Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony
 Ustawienia ogólne Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony Panel główny programu System Sensor (tylko dla wersja V2, V3, V4) Panel główny programu System
Ustawienia ogólne Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony Panel główny programu System Sensor (tylko dla wersja V2, V3, V4) Panel główny programu System
3. Sieć PLAN. 3.1 Adresowanie płyt głównych regulatora pco
 3. Sieć PLAN Wszystkie urządzenia podłączone do sieci plan są identyfikowane za pomocą swoich adresów. Ponieważ terminale użytkownika i płyty główne pco wykorzystują ten sam rodzaj adresów, nie mogą posiadać
3. Sieć PLAN Wszystkie urządzenia podłączone do sieci plan są identyfikowane za pomocą swoich adresów. Ponieważ terminale użytkownika i płyty główne pco wykorzystują ten sam rodzaj adresów, nie mogą posiadać
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Instrukcja obsługi sterownika Novitek Triton
 Instrukcja obsługi sterownika Triton I. Zastosowanie Sterownik TRITON przeznaczony jest do obsługi generatorów. Sterownik ten jest wyposażony w funkcję sterowania przekaźnikiem światła oraz przekaźnikiem
Instrukcja obsługi sterownika Triton I. Zastosowanie Sterownik TRITON przeznaczony jest do obsługi generatorów. Sterownik ten jest wyposażony w funkcję sterowania przekaźnikiem światła oraz przekaźnikiem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Asynchroniczne statyczne układy sekwencyjne
 Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Lista zadań nr 7. Rys. 1. Rozmieszczenia elementów sygnalizacji na skrzyżowaniu
 Sterowanie procesami dyskretnymi laboratorium dr inż. Grzegorz Bazydło G.Bazydlo@iie.uz.zgora.pl, staff.uz.zgora.pl/gbazydlo Lista zadań nr 7 Cel laboratorium Celem laboratorium jest wykorzystanie wiedzy
Sterowanie procesami dyskretnymi laboratorium dr inż. Grzegorz Bazydło G.Bazydlo@iie.uz.zgora.pl, staff.uz.zgora.pl/gbazydlo Lista zadań nr 7 Cel laboratorium Celem laboratorium jest wykorzystanie wiedzy
Analiza i projektowanie oprogramowania. Analiza i projektowanie oprogramowania 1/32
 Analiza i projektowanie oprogramowania Analiza i projektowanie oprogramowania 1/32 Analiza i projektowanie oprogramowania 2/32 Cel analizy Celem fazy określania wymagań jest udzielenie odpowiedzi na pytanie:
Analiza i projektowanie oprogramowania Analiza i projektowanie oprogramowania 1/32 Analiza i projektowanie oprogramowania 2/32 Cel analizy Celem fazy określania wymagań jest udzielenie odpowiedzi na pytanie:
Sterownik kompaktowy Theben PHARAO II
 Wydział Elektroniki Politechniki Wrocławskiej Laboratorium Automatyki Budynkowej Sterownik kompaktowy Theben PHARAO II 1. Wstęp Pherao II jest niewielkim sterownikiem kompaktowym, który charakteryzuje
Wydział Elektroniki Politechniki Wrocławskiej Laboratorium Automatyki Budynkowej Sterownik kompaktowy Theben PHARAO II 1. Wstęp Pherao II jest niewielkim sterownikiem kompaktowym, który charakteryzuje
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
LABORATORIUM 11, ZESTAW 1 SYNTEZA ASYNCHRONICZNYCH UKŁADÓW SEKWENCYJNYCH, CZ.I
 LABORATORIUM 11, ZESTAW 1 SYNTEZA ASYNCHRONICZNYCH UKŁADÓW SEKWENCYJNYCH, CZ.I Cel zajęć Synteza wybranych asynchronicznych układów sekwencyjnych metodą Huffmana. Materiały do przygotowania Materiały umieszczone
LABORATORIUM 11, ZESTAW 1 SYNTEZA ASYNCHRONICZNYCH UKŁADÓW SEKWENCYJNYCH, CZ.I Cel zajęć Synteza wybranych asynchronicznych układów sekwencyjnych metodą Huffmana. Materiały do przygotowania Materiały umieszczone
Laboratorium Elektrycznych Systemów Inteligentnych
 Laboratorium Elektrycznych Systemów Inteligentnych Ćwiczenie 16 Programowanie komponentów systemu automatyki domowej IHC Elektryczne Systemy Inteligentne 1 Przed ćwiczeniami należy zapoznać się również
Laboratorium Elektrycznych Systemów Inteligentnych Ćwiczenie 16 Programowanie komponentów systemu automatyki domowej IHC Elektryczne Systemy Inteligentne 1 Przed ćwiczeniami należy zapoznać się również
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
TECHNOLOGIE OBIEKTOWE WYKŁAD 2. Anna Mroczek
 TECHNOLOGIE OBIEKTOWE WYKŁAD 2 Anna Mroczek 2 Diagram czynności Czym jest diagram czynności? 3 Diagram czynności (tak jak to definiuje język UML), stanowi graficzną reprezentację przepływu kontroli. 4
TECHNOLOGIE OBIEKTOWE WYKŁAD 2 Anna Mroczek 2 Diagram czynności Czym jest diagram czynności? 3 Diagram czynności (tak jak to definiuje język UML), stanowi graficzną reprezentację przepływu kontroli. 4
NIFIED M L ODELLING ANGUAGE. Diagramy czynności
 U M L NIFIED ODELLING ANGUAGE Diagramy czynności 1 Czym jest diagram czynności? Jeden z pięciu rodzajów diagramów UML służących do modelowania dynamicznych aspektów systemu. Przedstawia przepływ sterowania
U M L NIFIED ODELLING ANGUAGE Diagramy czynności 1 Czym jest diagram czynności? Jeden z pięciu rodzajów diagramów UML służących do modelowania dynamicznych aspektów systemu. Przedstawia przepływ sterowania
ve Wyświetlacz LCD
 . Użytkowanie Wbudowany w skuter wyświetlacz LCD pozwala kierować jazdą, sterowaniem, hamowaniem i obsługą pojazdu. Moduł elektryczny oraz elektronika skutera elektrycznego są stale wewnętrznie monitorowane.
. Użytkowanie Wbudowany w skuter wyświetlacz LCD pozwala kierować jazdą, sterowaniem, hamowaniem i obsługą pojazdu. Moduł elektryczny oraz elektronika skutera elektrycznego są stale wewnętrznie monitorowane.
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Model: JMC-03_V2.2_RNS510 TV DVB-T for CAR INSTRUKCJA OBSŁUGI RNS 510. Spis treści
 JMC-0 Model: JMC-0_V2.2_RNS10 TV DVB-T for CAR INSTRUKCJA OBSŁUGI RNS 10 Spis treści 1. WSTĘP... 2. URUCHOMIENIE.... OBSŁUGA TV... Wybór i przełączanie stacji TV... Właczanie informacji o programach [EPG]...
JMC-0 Model: JMC-0_V2.2_RNS10 TV DVB-T for CAR INSTRUKCJA OBSŁUGI RNS 10 Spis treści 1. WSTĘP... 2. URUCHOMIENIE.... OBSŁUGA TV... Wybór i przełączanie stacji TV... Właczanie informacji o programach [EPG]...
Język UML w modelowaniu systemów informatycznych
 Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 7 Przeglądowe diagramy interakcji Przeglądowe diagramy interakcji wiążą
Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 7 Przeglądowe diagramy interakcji Przeglądowe diagramy interakcji wiążą
koniec punkt zatrzymania przepływów sterowania na diagramie czynności
 Diagramy czynności opisują dynamikę systemu, graficzne przedstawienie uszeregowania działań obrazuje strumień wykonywanych czynności z ich pomocą modeluje się: - scenariusze przypadków użycia, - procesy
Diagramy czynności opisują dynamikę systemu, graficzne przedstawienie uszeregowania działań obrazuje strumień wykonywanych czynności z ich pomocą modeluje się: - scenariusze przypadków użycia, - procesy
OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105
 OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105 Parametry pracy nadajnika TA105 są ustawiane programowo przy pomocy komputera osobistego przez osoby uprawnione przez operatora, które znają kod dostępu (PIN).
OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105 Parametry pracy nadajnika TA105 są ustawiane programowo przy pomocy komputera osobistego przez osoby uprawnione przez operatora, które znają kod dostępu (PIN).
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
W ielofunkcyjne linie wejściowe
 R o g e r A c c e s s C o n t r o l S y s t e m 5 Nota aplikacyjna nr 010 Wersja dokumentu: Rev. B W ielofunkcyjne linie wejściowe Wprowadzenie W systemie RACS 5 istnieje możliwość przypisywania wielu
R o g e r A c c e s s C o n t r o l S y s t e m 5 Nota aplikacyjna nr 010 Wersja dokumentu: Rev. B W ielofunkcyjne linie wejściowe Wprowadzenie W systemie RACS 5 istnieje możliwość przypisywania wielu
Instrukcja obsługi Wzmacniacz światłowodowy. OBF5xx 704513 / 00 04 / 2009
 Instrukcja obsługi Wzmacniacz światłowodowy PL OBF5xx 705 / 00 0 / 009 Spis treści Uwaga wstępna. Symbole Funkcje i własności. Zastosowania Montaż. Podłączenie światłowodów Podłączenie elektryczne 5 5
Instrukcja obsługi Wzmacniacz światłowodowy PL OBF5xx 705 / 00 0 / 009 Spis treści Uwaga wstępna. Symbole Funkcje i własności. Zastosowania Montaż. Podłączenie światłowodów Podłączenie elektryczne 5 5
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
WPROWADZENIE DO ŚRODOWISKA SCICOS
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki WPROWADZENIE DO ŚRODOWISKA SCICOS Materiały pomocnicze do ćwiczeń laboratoryjnych Oryginał: Modeling and Simulation in Scilab/Scicos Stephen L.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki WPROWADZENIE DO ŚRODOWISKA SCICOS Materiały pomocnicze do ćwiczeń laboratoryjnych Oryginał: Modeling and Simulation in Scilab/Scicos Stephen L.
2.2 Opis części programowej
 2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
1 Moduł Neuronu Cyfrowego SM
 1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
W_4 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Projektowanie oprogramowania cd. Projektowanie oprogramowania cd. 1/34
 Projektowanie oprogramowania cd. Projektowanie oprogramowania cd. 1/34 Projektowanie oprogramowania cd. 2/34 Modelowanie CRC Modelowanie CRC (class-responsibility-collaborator) Metoda identyfikowania poszczególnych
Projektowanie oprogramowania cd. Projektowanie oprogramowania cd. 1/34 Projektowanie oprogramowania cd. 2/34 Modelowanie CRC Modelowanie CRC (class-responsibility-collaborator) Metoda identyfikowania poszczególnych
Radio kuchenne Soundmaster DAB 2035, FM, RDS, srebrne
 INSTRUKCJA OBSŁUGI Radio kuchenne Soundmaster DAB 2035, FM, RDS, srebrne Nr produktu 352353 Strona 1 z 13 Radio kuchenne DAB2035 PLL 1. Ogólny opis - Pasmo DAB + / FM - Zapewniona nazwa stacji radiowej
INSTRUKCJA OBSŁUGI Radio kuchenne Soundmaster DAB 2035, FM, RDS, srebrne Nr produktu 352353 Strona 1 z 13 Radio kuchenne DAB2035 PLL 1. Ogólny opis - Pasmo DAB + / FM - Zapewniona nazwa stacji radiowej
PRZEPOMPOWNIE ŚCIEKÓW WOŁOMIN WYTYCZNE - STEROWANIA, SYGNALIZACJI I KOMUNIKACJI. maj 2012 r.
 PRZEPOMPOWNIE ŚCIEKÓW WOŁOMIN STADIUM: WYTYCZNE - STEROWANIA, SYGNALIZACJI I KOMUNIKACJI maj 2012 r. - 2 - SPIS TREŚCI 1.OPIS INSTALACJI 1.1 Instalacje siły, sterowania i oświetlenia przepompowni 3 1.2
PRZEPOMPOWNIE ŚCIEKÓW WOŁOMIN STADIUM: WYTYCZNE - STEROWANIA, SYGNALIZACJI I KOMUNIKACJI maj 2012 r. - 2 - SPIS TREŚCI 1.OPIS INSTALACJI 1.1 Instalacje siły, sterowania i oświetlenia przepompowni 3 1.2
1 Moduł Lutron HomeWorks QS
 1 Moduł Lutron HomeWorks QS Moduł Lutron HomeWorks QS daje użytkownikowi Systemu możliwość współpracy oprogramowania z urządzeniami firmy Lutron serii HomeWorks QS. System Vision może używać go do odbierania
1 Moduł Lutron HomeWorks QS Moduł Lutron HomeWorks QS daje użytkownikowi Systemu możliwość współpracy oprogramowania z urządzeniami firmy Lutron serii HomeWorks QS. System Vision może używać go do odbierania
Elastyczne systemy wytwarzania
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
Modelowanie aktywności. Jarosław Kuchta Programowanie Współbieżne
 Modelowanie aktywności Jarosław Kuchta Programowanie Współbieżne Pojęcia podstawowe (1/3) behawioryzm ogół zachowania obiektów, reakcje obiektów na zdarzenia. stan sytuacja w czasie życia obiektu, w którym
Modelowanie aktywności Jarosław Kuchta Programowanie Współbieżne Pojęcia podstawowe (1/3) behawioryzm ogół zachowania obiektów, reakcje obiektów na zdarzenia. stan sytuacja w czasie życia obiektu, w którym
INSTRUKCJA OBSŁUGI RNS-E. Spis treści
 JMC-03 Model: JMC-03_RNS-E TV DVB-T for CAR INSTRUKCJA OBSŁUGI RNS-E Spis treści 1 WSTĘP 2 2 URUCHOMIENIE 2 3 OBSŁUGA TV 3 Wybór i przełączanie stacji TV 3 Informacji o programach [EPG] 3 Wyszukiwanie
JMC-03 Model: JMC-03_RNS-E TV DVB-T for CAR INSTRUKCJA OBSŁUGI RNS-E Spis treści 1 WSTĘP 2 2 URUCHOMIENIE 2 3 OBSŁUGA TV 3 Wybór i przełączanie stacji TV 3 Informacji o programach [EPG] 3 Wyszukiwanie
Parametry ochrona przed kradzieżą. Wprowadzenie
 Wprowadzenie Wprowadzenie W celu ograniczenia listy parametrów w niniejszym dokumencie opisane zostały tylko parametry, które mogą być wykorzystywane przez producentów nadwozi. Pełne informacje na temat
Wprowadzenie Wprowadzenie W celu ograniczenia listy parametrów w niniejszym dokumencie opisane zostały tylko parametry, które mogą być wykorzystywane przez producentów nadwozi. Pełne informacje na temat
TECHNOLOGIE OBIEKTOWE. Wykład 3
 TECHNOLOGIE OBIEKTOWE Wykład 3 2 Diagramy stanów 3 Diagram stanu opisuje zmiany stanu obiektu, podsystemu lub systemu pod wpływem działania operacji. Jest on szczególnie przydatny, gdy zachowanie obiektu
TECHNOLOGIE OBIEKTOWE Wykład 3 2 Diagramy stanów 3 Diagram stanu opisuje zmiany stanu obiektu, podsystemu lub systemu pod wpływem działania operacji. Jest on szczególnie przydatny, gdy zachowanie obiektu
Wykład z Technologii Informacyjnych. Piotr Mika
 Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Centrala alarmowa ALOCK-1
 Centrala alarmowa ALOCK-1 http://www.alarmlock.tv 1. Charakterystyka urządzenia Centrala alarmowa GSM jest urządzeniem umożliwiającym monitorowanie stanów wejść (czujniki otwarcia, czujki ruchu, itp.)
Centrala alarmowa ALOCK-1 http://www.alarmlock.tv 1. Charakterystyka urządzenia Centrala alarmowa GSM jest urządzeniem umożliwiającym monitorowanie stanów wejść (czujniki otwarcia, czujki ruchu, itp.)
Język UML w modelowaniu systemów informatycznych
 Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 4 Diagramy aktywności I Diagram aktywności (czynności) (ang. activity
Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 4 Diagramy aktywności I Diagram aktywności (czynności) (ang. activity
1 Moduł Bramki xcomfort 3
 Spis treści 1 Moduł Bramki xcomfort 3 1.1 Konfigurowanie Modułu Bramki xcomfort............... 3 1.1.1 Lista elementów Modułu Bramki xcomfort.......... 3 1.1.2 Konfiguracja Modułu Bramki xcomfort............
Spis treści 1 Moduł Bramki xcomfort 3 1.1 Konfigurowanie Modułu Bramki xcomfort............... 3 1.1.1 Lista elementów Modułu Bramki xcomfort.......... 3 1.1.2 Konfiguracja Modułu Bramki xcomfort............
Dwukanałowy regulator temperatury NA24
 Dwukanałowy regulator temperatury NA24 NA24 to regulator temperatury 2w1 z możliwością konfiguracji każdego kanału z osobna lub ustawienia regulatora w tryb pracy współkanałowej. Urządzenie ma 2 wejścia
Dwukanałowy regulator temperatury NA24 NA24 to regulator temperatury 2w1 z możliwością konfiguracji każdego kanału z osobna lub ustawienia regulatora w tryb pracy współkanałowej. Urządzenie ma 2 wejścia
LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego
 LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego Uwagi (pominąć, jeśli nie ma problemów z wykonywaniem ćwiczenia) 1. Jeśli pojawiają się błędy przy próbie symulacji:
LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego Uwagi (pominąć, jeśli nie ma problemów z wykonywaniem ćwiczenia) 1. Jeśli pojawiają się błędy przy próbie symulacji:
ODBIORNIK ZDALNEGO STEROWANIA REMC0 DO MARKIZ I ROLET TDS GOLD MODEL INSTRUKCJA
 ODBIORNIK ZDALNEGO STEROWANIA DO MARKIZ I ROLET REMC0 MODEL TDS GOLD INSTRUKCJA POŁĄCZENIA ELEKTRYCZNE Podłączenie centralki mogą wykonywać jedynie przeszkoleni instalatorzy a instalacja musi odbywać się
ODBIORNIK ZDALNEGO STEROWANIA DO MARKIZ I ROLET REMC0 MODEL TDS GOLD INSTRUKCJA POŁĄCZENIA ELEKTRYCZNE Podłączenie centralki mogą wykonywać jedynie przeszkoleni instalatorzy a instalacja musi odbywać się
Przejście dwukierunkowe (tripod)
") R o g e r A c c e s s C o n t r o l S y s t e m 5 Nota aplikacyjna nr 019 Wersja dokumentu: Rev. B Przejście dwukierunkowe (tripod) Uwaga: Niniejszy dokument dotyczy RACS v5.2 (VISO 1.2.2 lub nowszy) Wprowadzenie
R o g e r A c c e s s C o n t r o l S y s t e m 5 Nota aplikacyjna nr 019 Wersja dokumentu: Rev. B Przejście dwukierunkowe (tripod) Uwaga: Niniejszy dokument dotyczy RACS v5.2 (VISO 1.2.2 lub nowszy) Wprowadzenie
SFC zawiera zestaw kroków i tranzycji (przejść), które sprzęgają się wzajemnie przez połączenia
, które sprzęgają się wzajemnie przez połączenia") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
INSTRUKCJA INSTALATORA
 -1- Zakład Elektroniki COMPAS 05-110 Jabłonna ul. Modlińska 17 B tel. (+48 22) 782-43-15 fax. (+48 22) 782-40-64 e-mail: ze@compas.com.pl INSTRUKCJA INSTALATORA MTR 105 STEROWNIK BRAMKI OBROTOWEJ AS 13
-1- Zakład Elektroniki COMPAS 05-110 Jabłonna ul. Modlińska 17 B tel. (+48 22) 782-43-15 fax. (+48 22) 782-40-64 e-mail: ze@compas.com.pl INSTRUKCJA INSTALATORA MTR 105 STEROWNIK BRAMKI OBROTOWEJ AS 13
Kurs programowania. Wykład 12. Wojciech Macyna. 7 czerwca 2017
 Wykład 12 7 czerwca 2017 Czym jest UML? UML składa się z dwóch podstawowych elementów: notacja: elementy graficzne, składnia języka modelowania, metamodel: definicje pojęć języka i powiazania pomiędzy
Wykład 12 7 czerwca 2017 Czym jest UML? UML składa się z dwóch podstawowych elementów: notacja: elementy graficzne, składnia języka modelowania, metamodel: definicje pojęć języka i powiazania pomiędzy
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0
 INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0 Opis ogólny: Sterownik inkubatora został zaprojektowany, tak aby spełnić potrzeby najbardziej wymagających procesów inkubacji. Urządzenie zostało
INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0 Opis ogólny: Sterownik inkubatora został zaprojektowany, tak aby spełnić potrzeby najbardziej wymagających procesów inkubacji. Urządzenie zostało
1. Zbiornik mleka. woda. mleko
 Założenia ogólne 1. Każdy projekt realizuje zespół złożóny z max. 2 osób. 2. Projekt składa się z 3 części: - aplikacji SCADA PRO-2000; - programu sterującego - realizującego obsługę urządzeń w sterowniku;
Założenia ogólne 1. Każdy projekt realizuje zespół złożóny z max. 2 osób. 2. Projekt składa się z 3 części: - aplikacji SCADA PRO-2000; - programu sterującego - realizującego obsługę urządzeń w sterowniku;
Logika Temporalna i Automaty Czasowe
 Modelowanie i Analiza Systemów Informatycznych Logika Temporalna i Automaty Czasowe (4) Modelowa weryfikacja systemu Paweł Głuchowski, Politechnika Wrocławska wersja 2.1 Treść wykładu Własności współbieżnych
Modelowanie i Analiza Systemów Informatycznych Logika Temporalna i Automaty Czasowe (4) Modelowa weryfikacja systemu Paweł Głuchowski, Politechnika Wrocławska wersja 2.1 Treść wykładu Własności współbieżnych
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy. Przebieg ćwiczenia
 Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
PROCEDURA USTAWIANIA CZUJNIKÓW
 www.alcaplast.cz PROCEDURA USTAWIANIA CZUJNIKÓW 1. Cechy oprogramowania Oprogramowanie Alca IR służy do ustawiania parametrów czujników podczerwieni M673D spółki ALCAPLAST. Do ustawienia czujnika konieczny
www.alcaplast.cz PROCEDURA USTAWIANIA CZUJNIKÓW 1. Cechy oprogramowania Oprogramowanie Alca IR służy do ustawiania parametrów czujników podczerwieni M673D spółki ALCAPLAST. Do ustawienia czujnika konieczny
MIKROPROCESOROWY ODSTRASZACZ DŹWIĘKOWY V2.0
 MIKROPROCESOROWY ODSTRASZACZ DŹWIĘKOWY V2.0 INSTRUKCJA MONTAŻU I OBSŁUGI 1 2 SPIS TREŚCI BEZPIECZEŃSTWO UŻYTKOWANIA...4 ZALECENIA MONTAŻOWE...4 DANE TECHNICZNE...4 ZASTOSOWANIE...5 ZASADA DZIAŁANIA...5
MIKROPROCESOROWY ODSTRASZACZ DŹWIĘKOWY V2.0 INSTRUKCJA MONTAŻU I OBSŁUGI 1 2 SPIS TREŚCI BEZPIECZEŃSTWO UŻYTKOWANIA...4 ZALECENIA MONTAŻOWE...4 DANE TECHNICZNE...4 ZASTOSOWANIE...5 ZASADA DZIAŁANIA...5
FC 330A - SYNOVA Instrukcja obsługi centrali FC 330A i FC 330A-ECO1
 FC 330A - SYNOVA Instrukcja obsługi centrali FC 330A i FC 330A-ECO1 Opracował: Andrzej Obłój, Siemens Zatwierdził :... Siemens Sp. z o.o. Building Technologies Fire & Security Products 03-821 Warszawa,
FC 330A - SYNOVA Instrukcja obsługi centrali FC 330A i FC 330A-ECO1 Opracował: Andrzej Obłój, Siemens Zatwierdził :... Siemens Sp. z o.o. Building Technologies Fire & Security Products 03-821 Warszawa,
HC1 / HC2. Regulator temperatury
 HC1 / HC2 Regulator temperatury Uwagi dotyczące miejsca użytkowania Opisywany sterownik HC1/HC2 nie powinien być używany: W środowisku gazów łatwopalnych, gazów wywołujących korozję oraz cząsteczek, które
HC1 / HC2 Regulator temperatury Uwagi dotyczące miejsca użytkowania Opisywany sterownik HC1/HC2 nie powinien być używany: W środowisku gazów łatwopalnych, gazów wywołujących korozję oraz cząsteczek, które
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
INDU-22. Przemysłowy Sterownik Mikroprocesorowy. Przeznaczenie. masownica próżniowa
 Przemysłowy Sterownik Mikroprocesorowy INDU-22 Przeznaczenie masownica próżniowa Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v1.1
Przemysłowy Sterownik Mikroprocesorowy INDU-22 Przeznaczenie masownica próżniowa Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v1.1
Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026"
 Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026" Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763-77-77 Fax: 032 763-75-94 v.1.2 www.mikster.pl mikster@mikster.pl (14.11.2007) SPIS
Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026" Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763-77-77 Fax: 032 763-75-94 v.1.2 www.mikster.pl mikster@mikster.pl (14.11.2007) SPIS
Sterowanie pracą reaktora chemicznego
 Sterowanie pracą reaktora chemicznego Celem ćwiczenia jest opracowanie na sterowniku programowalnym programu realizującego jednopętlowy układ regulacji a następnie dobór nastaw regulatora zapewniających
Sterowanie pracą reaktora chemicznego Celem ćwiczenia jest opracowanie na sterowniku programowalnym programu realizującego jednopętlowy układ regulacji a następnie dobór nastaw regulatora zapewniających
POLITECHNIKA OPOLSKA
 POLITECHNIKA OPOLSKA WYDZIAŁ MECHANICZNY Katedra Technologii Maszyn i Automatyzacji Produkcji Laboratorium Podstaw Inżynierii Jakości Ćwiczenie nr 2 Temat: Schemat blokowy (algorytm) procesu selekcji wymiarowej
POLITECHNIKA OPOLSKA WYDZIAŁ MECHANICZNY Katedra Technologii Maszyn i Automatyzacji Produkcji Laboratorium Podstaw Inżynierii Jakości Ćwiczenie nr 2 Temat: Schemat blokowy (algorytm) procesu selekcji wymiarowej
Program testowy i kody błędów suszarki Bosch
 Program testowy i kody błędów suszarki Bosch WFQ2840EU/01 1. Wybór programu kontrolnego Zwracać uwagę na funkcję przełącznika wyboru programów! Uruchomienie programu kontrolnego Wybór poszczególnych testów
Program testowy i kody błędów suszarki Bosch WFQ2840EU/01 1. Wybór programu kontrolnego Zwracać uwagę na funkcję przełącznika wyboru programów! Uruchomienie programu kontrolnego Wybór poszczególnych testów
LEGENDFORD. system alarmowy
 LEGENDFORD system alarmowy *Funkcja KOMFORT* *Regulowany czas uzbrajania czujników* *Regulacja czasu na centralny zamek* 'Zamykanie zamków drzwi w czasie jazdy* *ANTI Hl JACK* *PASYWNA BLOKADA* INSTRUKCJA
LEGENDFORD system alarmowy *Funkcja KOMFORT* *Regulowany czas uzbrajania czujników* *Regulacja czasu na centralny zamek* 'Zamykanie zamków drzwi w czasie jazdy* *ANTI Hl JACK* *PASYWNA BLOKADA* INSTRUKCJA
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Procedury trybu serwisowego oraz kody błędów chłodziarki Liebherr C3253, C3533 oraz C4023
 Procedury trybu serwisowego oraz kody błędów chłodziarki Liebherr C3253, C3533 oraz C4023 Tryb serwisowy Menu serwisowe może być wykorzystywane wyłącznie przez techników serwisowych. wł. / wył. wentylacja
Procedury trybu serwisowego oraz kody błędów chłodziarki Liebherr C3253, C3533 oraz C4023 Tryb serwisowy Menu serwisowe może być wykorzystywane wyłącznie przez techników serwisowych. wł. / wył. wentylacja
Xelee Mini IR / DMX512
 Xelee Mini IR / DMX512 Sterowniki LED do modułów napięciowych Xelee Mini IR to trzykanałowy sterownik przystosowany do pracy z napięciowymi modułami LED, takimi jak popularne taśmy LED. Wbudowany układ
Xelee Mini IR / DMX512 Sterowniki LED do modułów napięciowych Xelee Mini IR to trzykanałowy sterownik przystosowany do pracy z napięciowymi modułami LED, takimi jak popularne taśmy LED. Wbudowany układ
Przykładowe działania systemu R-CAD
 Przykładowe działania systemu R-CAD 1 Osoba opuszczająca obiekt zazbraja system alarmowy błędnym kodem Sygnał nieuprawnionego uzbrojenia wysyłany do modułu I/0 Wykrycie obiektu w zaznaczonej strefie badanej
Przykładowe działania systemu R-CAD 1 Osoba opuszczająca obiekt zazbraja system alarmowy błędnym kodem Sygnał nieuprawnionego uzbrojenia wysyłany do modułu I/0 Wykrycie obiektu w zaznaczonej strefie badanej
1 Moduł Bramki xcomfort
 1 Moduł Bramki xcomfort Moduł Bramki xcomfort daje użytkowników możliwość integracji Systemu Vision z urządzeniami bezprzewodowymi systemu Moeller xcomfort. Odpowiada on za zapewnienie łącza komunikacyjnego,
1 Moduł Bramki xcomfort Moduł Bramki xcomfort daje użytkowników możliwość integracji Systemu Vision z urządzeniami bezprzewodowymi systemu Moeller xcomfort. Odpowiada on za zapewnienie łącza komunikacyjnego,
INSTRUKCJA UŻYTKOWNIKA OBSŁUGA I EKSPLOATACJA SAMOCHODU WYPOSAŻONEGO W SYSTEM SEKWENCYJNEGO WTRYSKU GAZU. Diego G3 / NEVO
 INSTRUKCJA UŻYTKOWNIKA OBSŁUGA I EKSPLOATACJA SAMOCHODU WYPOSAŻONEGO W SYSTEM SEKWENCYJNEGO WTRYSKU GAZU Diego G3 / NEVO Strona 2 z 7 Spis treści 1. URUCHAMIANIE SILNIKA... 3 2. PANEL STERUJĄCY... 3 2.1
INSTRUKCJA UŻYTKOWNIKA OBSŁUGA I EKSPLOATACJA SAMOCHODU WYPOSAŻONEGO W SYSTEM SEKWENCYJNEGO WTRYSKU GAZU Diego G3 / NEVO Strona 2 z 7 Spis treści 1. URUCHAMIANIE SILNIKA... 3 2. PANEL STERUJĄCY... 3 2.1
1 Moduł Neuronu Cyfrowego
 1 Moduł Neuronu Cyfrowego Moduł Neuronu Cyfrowego daje użytkownikowi Systemu Vision możliwość obsługi fizycznych Neuronów Cyfrowych. Dzięki temu możliwe jest sterowanie zewnętrznymi urządzeniami wykonawczymi
1 Moduł Neuronu Cyfrowego Moduł Neuronu Cyfrowego daje użytkownikowi Systemu Vision możliwość obsługi fizycznych Neuronów Cyfrowych. Dzięki temu możliwe jest sterowanie zewnętrznymi urządzeniami wykonawczymi
Logiki Nexo Oświetlenie Suplement instalatora
 System firmy Nexwell przeznaczony do sterowania inteligentnym domem Logiki Nexo Oświetlenie Suplement instalatora Niniejszy suplement pozwoli Państwu zapoznać się ze sposobami wykorzystania Nexo do ręcznego
System firmy Nexwell przeznaczony do sterowania inteligentnym domem Logiki Nexo Oświetlenie Suplement instalatora Niniejszy suplement pozwoli Państwu zapoznać się ze sposobami wykorzystania Nexo do ręcznego
INSTRUKCJA OBSŁUGI Sterownik grupowy on/off
 INSTRUKCJA OBSŁUGI Sterownik grupowy on/off KJR-90B Przed uruchomieniem urządzenia należy uważnie zapoznać się z instrukcją obsługi. KJR-90B to ujednolicony, prosty w obsłudze i kompaktowy sterownik centralny,
INSTRUKCJA OBSŁUGI Sterownik grupowy on/off KJR-90B Przed uruchomieniem urządzenia należy uważnie zapoznać się z instrukcją obsługi. KJR-90B to ujednolicony, prosty w obsłudze i kompaktowy sterownik centralny,
Katedra Inżynierii Systemów Sterowania WEiA PG. Przemysłowe Sieci Informatyczne Laboratorium
 Katedra Inżynierii Systemów Sterowania WEiA PG Przemysłowe Sieci Informatyczne Laboratorium Instrukcja do ćwiczenia: Sieć Profibus DP (Decentralized Perhipals) Opracowali: Dr inż. Jarosław Tarnawski Dr
Katedra Inżynierii Systemów Sterowania WEiA PG Przemysłowe Sieci Informatyczne Laboratorium Instrukcja do ćwiczenia: Sieć Profibus DP (Decentralized Perhipals) Opracowali: Dr inż. Jarosław Tarnawski Dr
INSTRUKCJA OBSŁUGI STEROWNIKA GSM-44. Zakład Automatyki Przemysłowej i UŜytkowej MODUS ul. Rączna 22 30-741 Kraków
 Zakład Automatyki Przemysłowej i UŜytkowej MODUS ul. Rączna 22 30-741 Kraków tel. 012 650 64 90 GSM +48 602 120 990 fax 012 650 64 91 INSTRUKCJA OBSŁUGI STEROWNIKA GSM-44 Kraków 2009 Szybki START Sterowniki
Zakład Automatyki Przemysłowej i UŜytkowej MODUS ul. Rączna 22 30-741 Kraków tel. 012 650 64 90 GSM +48 602 120 990 fax 012 650 64 91 INSTRUKCJA OBSŁUGI STEROWNIKA GSM-44 Kraków 2009 Szybki START Sterowniki
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
LABORATORIUM ENERGOOSZCZĘDNEGO BUDYNKU
 LABORATORIUM ENERGOOSZCZĘDNEGO BUDYNKU Ćwiczenie 9 STEROWANIE ROLETAMI POPRZEZ TEBIS TS. WYKORZYSTANIE FUNKCJI WIELOKROTNEGO ŁĄCZENIA. 2 1. Cel ćwiczenia. Celem ćwiczenia jest nauczenie przyszłego użytkownika
LABORATORIUM ENERGOOSZCZĘDNEGO BUDYNKU Ćwiczenie 9 STEROWANIE ROLETAMI POPRZEZ TEBIS TS. WYKORZYSTANIE FUNKCJI WIELOKROTNEGO ŁĄCZENIA. 2 1. Cel ćwiczenia. Celem ćwiczenia jest nauczenie przyszłego użytkownika
POLITECHNIKA OPOLSKA
 POLITECHNIKA OPOLSKA WYDZIAŁ MECHANICZNY Katedra Technologii Maszyn i Automatyzacji Produkcji Laboratorium Podstaw Inżynierii Jakości Ćwiczenie nr 2 Temat: Schemat blokowy (algorytm) procesu selekcji wymiarowej
POLITECHNIKA OPOLSKA WYDZIAŁ MECHANICZNY Katedra Technologii Maszyn i Automatyzacji Produkcji Laboratorium Podstaw Inżynierii Jakości Ćwiczenie nr 2 Temat: Schemat blokowy (algorytm) procesu selekcji wymiarowej
Panelowy moduł automatyki SZR SIEĆ-AGREGAT ATS-10
 Panelowy moduł automatyki SZR SIEĆ-AGREGAT ATS-10 Opis Moduł ATS-10 odpowiada za kontrolę napięcia zasilania sieciowego i automatyczne przełączenie na zasilanie z agregatu. W przypadku awarii głównego
Panelowy moduł automatyki SZR SIEĆ-AGREGAT ATS-10 Opis Moduł ATS-10 odpowiada za kontrolę napięcia zasilania sieciowego i automatyczne przełączenie na zasilanie z agregatu. W przypadku awarii głównego
Podstawy Automatyki. Wykład 13 - Wprowadzenie do układów sekwencyjnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Informacje dla kierowcy/użytkownika instalacji gazowej opartej na systemie elektronicznym LS Next
 Informacje dla kierowcy/użytkownika instalacji gazowej opartej na systemie elektronicznym LS Next System sekwencyjnego wtrysku gazu LS Next zapewnia pracę silnika na zasilaniu gazowym o porównywalnych
Informacje dla kierowcy/użytkownika instalacji gazowej opartej na systemie elektronicznym LS Next System sekwencyjnego wtrysku gazu LS Next zapewnia pracę silnika na zasilaniu gazowym o porównywalnych
FRODO-BIS2P AUTOALARM INSTRUKCJA OBSŁUGI. Oznaczenie przycisków pilota : Funkcje przycisków pilota: P-l
 AUTOALARM FRODO-BIS2P INSTRUKCJA OBSŁUGI Oznaczenie przycisków pilota : Funkcje przycisków pilota: P-l włączenie centrali w stan czuwania wyłączenie centralki ze stanu czuwania wyłączanie stanu alarmowania
AUTOALARM FRODO-BIS2P INSTRUKCJA OBSŁUGI Oznaczenie przycisków pilota : Funkcje przycisków pilota: P-l włączenie centrali w stan czuwania wyłączenie centralki ze stanu czuwania wyłączanie stanu alarmowania
Diagramy stanów i aktywności. Jarosław Kuchta Dokumentacja i Jakość Oprogramowania
 Diagramy stanów i aktywności Jarosław Kuchta Pojęcia podstawowe (1/3) behawioryzm ogół zachowania obiektów, reakcje obiektów na zdarzenia. stan sytuacja w czasie życia obiektu, w którym spełniony jest
Diagramy stanów i aktywności Jarosław Kuchta Pojęcia podstawowe (1/3) behawioryzm ogół zachowania obiektów, reakcje obiektów na zdarzenia. stan sytuacja w czasie życia obiektu, w którym spełniony jest
Pierwsze kroki z easy Soft CoDeSys. 2009 Eaton Corporation. All rights reserved.
 Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Stan/zdarzenie Nexo. Zmienne wirtualne. Zdarzenia wirtualne
 WARUNKI WARUNKI I I ZDARZENIA ZDARZENIA Określają czy pewna zależność logiczna związana ze stanem systemu jest w danej chwili spełniona lub czy zaszło w systemie określone zdarzenie. STAN SYSTEMU: stan
WARUNKI WARUNKI I I ZDARZENIA ZDARZENIA Określają czy pewna zależność logiczna związana ze stanem systemu jest w danej chwili spełniona lub czy zaszło w systemie określone zdarzenie. STAN SYSTEMU: stan
Sterowanie i kontrola dla wentylatora DV-RK1 z silnikiem trójfazowym o mocy do 5 kw z wielopłaszczyznową przepustnicą JZI z siłownikiem 24 V AC/DC
 Sterowanie i kontrola dla wentylatora DV-RK1 z silnikiem trójfazowym o mocy do 5 kw z wielopłaszczyznową przepustnicą JZI z siłownikiem 24 V AC/DC Przeznaczenie modułu sterująco-kontrolnego EKS-Light:
Sterowanie i kontrola dla wentylatora DV-RK1 z silnikiem trójfazowym o mocy do 5 kw z wielopłaszczyznową przepustnicą JZI z siłownikiem 24 V AC/DC Przeznaczenie modułu sterująco-kontrolnego EKS-Light:
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Platforma Systemowa Wonderware przykład zaawansowanego systemu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Platforma Systemowa Wonderware przykład zaawansowanego systemu
Moduł N/O LED SE Czujnik Gniazdo sterowania zamek centr. Gniazdo uruchomienia silnika
 INSTRUKCJA MONTAŻU ZK LCD- system alarmowy przeznaczony do pojazdów z masą na karoserii, z możliwością uruchomienia silnika w różnych trybach czasowo, z pomiarem temperatury, zdalnie. 1 2 2 1 1 2 3 4 3
INSTRUKCJA MONTAŻU ZK LCD- system alarmowy przeznaczony do pojazdów z masą na karoserii, z możliwością uruchomienia silnika w różnych trybach czasowo, z pomiarem temperatury, zdalnie. 1 2 2 1 1 2 3 4 3
Programowanie xcomfort Cz. I Eaton Corporation. All rights reserved.
 Programowanie Cz. I Spis treści 1. Skanowanie dużych instalacji WSKAZÓWKA 2. Konfiguracja modułu programowania 3. Uruchomienie programu Eaton RF PL 4. Ustawianie opcji programu Eaton RF PL 5. Uruchamianie
Programowanie Cz. I Spis treści 1. Skanowanie dużych instalacji WSKAZÓWKA 2. Konfiguracja modułu programowania 3. Uruchomienie programu Eaton RF PL 4. Ustawianie opcji programu Eaton RF PL 5. Uruchamianie