Czy robotyk potrzebuje matematyki? matematycy mieli wpływ na rozwój robotyki?)
|
|
|
- Miłosz Kowalik
- 6 lat temu
- Przeglądów:
Transkrypt
1 (czy matematycy mieli wpływ na rozwój robotyki?) Katedra Metod Matematycznych Informatyki Wydział Matematyki i Informatyki Uniwersytet Warmińsko Mazurski artem@matman.uwm.edu.pl webpage: artem
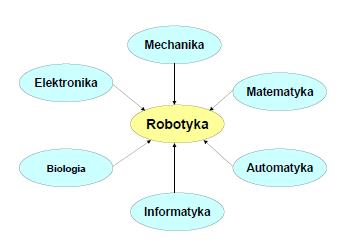
2 Interdyscyplinarność robotyki

3 Historia Robotyki - około p.n.e. Mitologia Grecka: Talos, mechaniczny gigant z brązu wykuty przez Hefajstosa greckiego boga ognia, kowali i złotników - strażnik Krety
 napędzany parą - grec. mat.")
4 Historia Robotyki - około 350 p.n.e. Mechaniczny gołąb (The Pigeon) napędzany parą - grec. mat. Archytas z Tarentu.

5 Historia Robotyki Mechaniczny rycerz w zbroi - Leonardo da Vinci W średniowieczu budowano tego typu mechanizmy napędzane energią wodną, siłą ciężkości, sprężynami, służyły do zabawiania władców, otwierały drzwi i witały wchodzących gości. Na rysunku rekonstrukcja Marka Rosheima z 2002 roku.
.")
6 około 1550 Kobieta Torriano, potrafiącego grać na lutni - Juanelo Turriano z Cremony (wł.-hiszp. inż., mat.). Można ją zobaczyć w Kunsthistorisches Museum we Wiedniu.

7 1564 Projekt mechanicznej ręki - Francuz Pare Ambroise.
.")
8 1642 Mechaniczna Maszyna licząca Pascalina - Blaise Pascal (franc. mat.). Dodaje i odejmuje.
 - mnożenie matematyczne.")
9 1694 Mechaniczny komputer Liebniz a (Gottfried Wilhelm (von) Leibniz) (niem. mat.) - mnożenie matematyczne Jonathan Swift opisuje w Podróżach Guliwera maszynę, która sama będzie pisać książki.

10 1738 Mechaniczna kaczka - Jacque de Vaucanson

11 1800 Wszystkie aspekty produkcji ubrań są zautomatyzowane Automatyczne krosno - Joseph Jacquard

12 1821 Odkrycie rotacji elektromagnetycznej - Michael Farraday. Buduje pierwsze 2 silniki napędzane elektrycznie Silnik analityczny - Charles Babbage (ang. mat.).
13 1829 Pierwszy zegarek elektromagnetyczny Budowa przekaźnika elektrycznego - Joseph Henry Algebra Boole a - George Boole (ang. mat) Najprostsza algebra Boole a ma tylko dwa elementy, 0 i 1, algebra ta stanowi podstawę elektroniki cyfrowej.
14

15 1896 Powstaje firma Tabulating Machine Company, która przekształci się w IBM - Herman Hollerith.

16 1898 Wynalazki Nikola Tesli

17 1898 Sterowana radiowo łódź - Nikola Tesla.
18 1913 Prawdziwsza automatyczna linia montażowa - Henry Ford Pierwsze użycie słowa robot - czeski pisarz Karel Capek, R.U.R (Rossuum s Universal Robots) 1937 Pierwsza oficjalna ofiara śmiertelna spowodowana przez robota - Kenji Urada pracownik zakładów Kawasaki.
19 1940 Prawa robotyki Isaaca Asimova: Prawo pierwsze: Robot nie może skrzywdzić człowieka, ani przez zaniechanie działania dopuścić, aby człowiek doznał krzywdy. Prawo drugie Robot musi być posłuszny rozkazom człowieka, chyba że stoją one w sprzeczności z pierwszym prawem. Prawo trzecie Robot musi chronić sam siebie, jeśli tylko nie stoi to w sprzeczności z pierwszym lub drugim prawem. Prawo zerowe(nadrzędne) Robot nie może skrzywdzić ludzkości, ani przez zaniechanie działania doprowadzić do uszczerbku dla ludzkości.

20 1941 Z-3 - Konrad Zuse 1947 Opracowanie tranzystora - William Bradford Schockley, Walter Hauser Brittain i John Ardeen Czy maszyna potrafi myśleć? Alan Turing (ang. inf. mat.).
21 1958 Pierwszy obwód scalony - Jack Clair Kilby 1959 Powstaje Massachusetts Institute of Technology (MIT) - John McCarthy i Marvin Minsky 1959 Proces produkcyjny wspomagany przez komputery - Laboratorium Serwomechanizmów (MIT).
 - General")
22 1960 Hydrauliczno elektryczny skafander (Pierwszy egzoszkielet) - General Electric.

23 1962 Pierwsze ramię robota przemysłowego - Unimation. Do wykonywania niebezpiecznych prac na linii produkcyjnej General motors.

24 1968 Pierwszy robot kroczący sterowany komputerowo - Uniwersytet Południowej Karolinie.

25 1969 Powstaje WAP-1 - pierwszy dwunożny robot kroczący, zbudowany przez Ichiro Kato. Kato zastosował komputery do stymulowania sztucznych mięśni, połączonych z ramą.

26 1970 Wystrzelenie w kosmos pierwszego bezzałogowego, sterowanego z Ziemi robo-pojazdu - ZSRR. Był przeznaczony do badania Księżyca.

27 1980 Sześcionożny robot (owad) - Robert Quinn i Roy Ritzmann z Uniwersytetu Case Western Reserve.

28 1981 IBM wprowadza na rynek komputer osobisty (PC).

29 1984 robota Wabot-2 - Ichiro Kato. Robot potrafi czytać nuty i grać na elektronicznych organach.

30 1994 Pierwszy lot Predatora - bezzałogowego samolotu zwiadowczego,

31 1996 Robot humanoidalny Hondy P3.

32 1997 Zrobotyzowany łazik Sojourner ląduje na Marsie - NASA - Pathfinder Mission, działa 2 miesiące.

33 1997 Pierwszy turniej piłki nożnej robotów RoboCup - japońskie miasto Nagoja.
34 1998 Pierwszy zestaw Robotics Invention SystemTM 1.0. MINDSTORMS - Lego.

35 1999 Mechaniczny pies Aibo - SONY.

36 2002 Taktyczny robot militarny - amerykańska firma irobot PackBot. Służy do przeszukiwania jaskiń, bunkrów i pomieszczeń w budynkach, oraz przemieszcza się przez pola minowe. Zastosowany w Afganistanie i Iraku.

37 2004 Robot Tron X - niemiecka firma Fest skalibrowanych siłowników zapewnia mu ruchliwość i mimikę twarzy zbliżoną do ludzkiej.

38 2004 EcoBot II - Zbudowany przez Brytyjskich Inżynierów. Urządzenie czerpie energię z... much lub zgniłych owoców. Martwe owady zasilają 8 ogniw paliwowych.
.")
39 2004,2005(wyścigi terenowe),2007(sztuczne tereny miejskie) DARPA Grand Challenge to sponsorowane przez Defense Advanced Research Projects Agency (DARPA) zawody samochodów autonomicznych, czyli poruszających się bez kierowców odbywające się w ramach projektu Systemów Bojowych Przyszłości (FCS). Kongres Stanów Zjednoczonych zdecydował, aby DARPA przyznawała nagrody pieniężne w celu sponsorowania projektów badawczych mogących mieć związek z bezpieczeństwem narodowym.

40 2006 Robot humanoidalny przypominający kobietę - zbudowany przez południowokoreańskich inżynierów. EveR-1 może być używany do oprowadzania po muzeum lub jako android-nauczyciel, który czyta książki dzieciom.
41 2006 Sterowanie robota Asimo za pomocą myśli - Honda oraz ATR Computational Neuroscience Laboratories. System ten opiera się na monitorowaniu fal mózgowych użytkownika, wykorzystując w tym celu specjalne urządzenie do przeprowadzania rezonansu magnetycznego Robot rozpoznający gatunek wina, bez otwierania butelki. Prześwietla wina strumieniem podczerwieni dokonuje analizy jego składu chemicznego.

42 2006 Samonaprawiający się robot - naukowcy z Uniwersytetu Vermont. Dostosowuje się do zmian w otoczeniu, potrafi poruszać się w różnych warunkach. Tracąc możliwość poruszania się, np przez stratę nogi, potrafi nauczyć się poruszać w inny sposób.
43 2007 Robot potrafiący odczuwać emocje - zbudowany przez brytyjskich naukowców. Robot został zbudowany przy współpracy ekspertów z dziedziny robotyki, psychologii i neurologii. Ich celem było stworzenie robota, który byłby w stanie zaangażować się emocjonalnie w relacje z człowiekiem. Robot posługuje się wzrokiem, słuchem, dotykiem i osądem, pozwalającym mu ocenić dystans emocjonalny z człowiekiem. Potrafi rozpoznać nasz język ciała i reagować na nasze stany emocjonalne, takie jak złość, strach i szczęście.

44 2007 Pierwszy mecz piłkarski robotów z ludźmi. 2:1 dla ludzi.

45 2007 Super-wytrzymały robot eksploracyjny Tumbleweed Rover - NASA. Testowany na Antarktydzie. Przelatując przez atmosferę ma się zachowywać jak spadochron, lądując, jak poduszka powietrzna, a po wylądowaniu ma służyć jako bezzałogowy pojazd wyposażony w liczne instrumenty pomiarowe.

46 2008 Gigantyczny Robot ATHLETE - NASA. Ewentualnym zastosowaniem może być przemieszczanie bazy księżycowej. Robot ma 7,5 metra długości i dysponuje sześcioma nogami o długości przekraczającej 6 metrów każda. Zachowywałby się jak żółw, przenosząc bazę na swym grzbiecie niczym skorupę.

47 2008 Human Universal Load Carrier - Berkeley Bionics. Egzoszkielet pozwala przenieść do 90 kilogramów bez obciążania nosiciela, a dodatkowo wpływa na obniżenie jego kosztu metabolicznego.
.")
48 2008 Robot sterowany biologicznym mózgiem zbudowany z wyhodowanych neuronów - University of Reading. Biologiczny mózg robota zbudowany jest z wyhodowanych neuronów umieszczonych w macierzy wieloelektrodowej (MEA). MEA to naczynie wyposażone w około 60 elektrod, które przechwytują sygnały elektryczne generowane przez komórki. Robot w całości sterowany jest przez własny mózg. Nie ma żadnego dodatkowego zewnętrznego sterowania.

49 2009 Robot EATR (zjadacz) - DARPA. Do wykonywania długotrwałych misji, Wytwarza energie przez spalanie biomasy, niewielkich obiektów pochodzenia roślinnego.

50 2009 Robot, który odkrył samodzielnie zasadę naukową i ją zweryfikował - Cambridge oraz Aberystwyth. Odkrył zasadę dotyczącą analizy genetycznej drożdży piekarskich. Wykorzystując sztuczną inteligencję, postawił hipotezę zakładającą, że określone geny w drożdżach piekarskich zawierają specyficzne enzymy, które katalizują reakcje biochemiczne zachodzące w drożdżach. Robot następnie stworzył serię eksperymentów testujących założenie, przeprowadził je, zinterpretował ich wyniki i powtórzył cały cykl.
51 2009 Mikro robot - Australia Monash University. Zdalnie sterowane miniaturowe roboty mierzą zaledwie 250 mikrometrów długości i są tak małe, że mogą swobodnie poruszać się w ludzkich arteriach, również tych czaszkowych, które dotąd były niedostępne ze względu na ich labiryntową strukturę. Dzięki zamontowanym na mikrobocie układom czujników, lekarz zyskuje ogrom informacji, które pozwalają sprawniej i precyzyjniej prowadzić operacje.
52 2010 Armia USA - jest już wyposażona w blisko robotów, - stopniowo zwiększa się autonomia robotów wykorzystywanych na placu boju, - obecnie prawie całkowitą kontrolę mają operatorzy zdalni, oddaleni nawet kilka tysięcy kilometrów,

53 2010 Magma1 - zdalnie sterowany robot marsjański - zbudowany przez studentów Politechniki Białostockiej i UMK w Toruniu.

54 2010 Magma1

55 2010 Łazik Magma2 - wyposazony w dwa heksakoptery

56 2010 Robo piosenkarka pop - tańczy, skacze, balansuje ciałem,

57 2010 Roboty Engkez - nauczające j. angielskiego - projekt wykorzystania robotów w edukacyjni - zdalnie kontrolowane przez nauczycieli angielskiego na Filipinach,

58 2010 Freie Universitat Berlin - MadeInGermany - MIG - autonomiczny samochód, zbudowany na bazie Volkswagena Passata typu station wagon,

59 2010 AR.Drone latający, zdalnie sterowany helikopter dron notowanego na giełdzie francuskiego przedsiębiorstwa Parrot zaprezentowany na targach CES 2010 w Las Vegas

60 2012 Łazik Curiosity - Lądowanie na Marsie 6 sierpnia 2012

61 Grudzień 2013 Google przejmuje Boston Dynamics - firmę tworzącą roboty przeznaczone dla armii amerykańskiej
 - 2014 drukowanie w")
62 Tanie drukarki 3D (od 2011) drukowanie w metalu

63 The DARPA Robotics Challenge (DRC) - cel konstruowanie pół-autonomicznych robotów naziemnych zdolnych do wykonywania złożonych zadań w niebezpiecznych warunkach

64 Rosyjski robot bojowy Soratnik 2016

65 Robot bojowy 2016

66 Robot bojowy 2016


67 Praca nad autonomią powietrznych systemów rojowych 2016 F-18 E/F Super Hornet, testowano 103 mini BSP Perdix działające w ugrupowaniu tzw. roju, celem zbadania jego zachowania w przestrzeni powietrznej oraz skuteczności takiego ugrupowania w podejmowaniu właściwych do wykonania konkretnych zadań decyzji tzw. autonomii współdziałania (collaborative autonomy).

68 Praca nad autonomią powietrznych systemów rojowych 2016 F-18 E/F Super Hornet, testowano 103 mini BSP Perdix działające w ugrupowaniu tzw. roju, celem zbadania jego zachowania w przestrzeni powietrznej oraz skuteczności takiego ugrupowania w podejmowaniu właściwych do wykonania konkretnych zadań decyzji tzw. autonomii współdziałania (collaborative autonomy).

69 Dziękuję
HISTORIA ROBOTÓW. fot.
 około 350 p.n.e. HISTORIA ROBOTÓW http://www.asimo.pl, fot. www.thocp.net Wybitny grecki matematyk Archytas z Tarentu buduje mechanicznego ptaka, nazwanego Gołąb (ang. The Pigeon), napędzanego parą. Według
około 350 p.n.e. HISTORIA ROBOTÓW http://www.asimo.pl, fot. www.thocp.net Wybitny grecki matematyk Archytas z Tarentu buduje mechanicznego ptaka, nazwanego Gołąb (ang. The Pigeon), napędzanego parą. Według
Historia sztucznej inteligencji. Przygotował: Konrad Słoniewski
 Historia sztucznej inteligencji Przygotował: Konrad Słoniewski Prahistoria Mit o Pigmalionie Pandora ulepiona z gliny Talos olbrzym z brązu Starożytna Grecja System sylogizmów Arystotelesa (VI w. p.n.e.)
Historia sztucznej inteligencji Przygotował: Konrad Słoniewski Prahistoria Mit o Pigmalionie Pandora ulepiona z gliny Talos olbrzym z brązu Starożytna Grecja System sylogizmów Arystotelesa (VI w. p.n.e.)
w XVIII LO im. Jana Zamoyskiego zorganizowany przez Zamoyskie Koło Robotyki Do Roboty
 Dzień Robota w XVIII LO im. Jana Zamoyskiego zorganizowany przez Zamoyskie Koło Robotyki Do Roboty O robotach Nazwy robot po raz pierwszy użył czeski pisarz Karel Ĉapek w sztuce R.U.R. Rossum's Universal
Dzień Robota w XVIII LO im. Jana Zamoyskiego zorganizowany przez Zamoyskie Koło Robotyki Do Roboty O robotach Nazwy robot po raz pierwszy użył czeski pisarz Karel Ĉapek w sztuce R.U.R. Rossum's Universal
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
15 grudnia 19 stycznia 11 luty -
 Jak to się zaczęło? 15 grudnia 2010 r. zaprasza nas Koło Naukowe Robotyki Cyborg++ (Wydział Mechatroniki PW), 19 stycznia 2011 r. - nawiązaliśmy kontakt z kołem naukowym Bionic na Wydziale Elektroniki
Jak to się zaczęło? 15 grudnia 2010 r. zaprasza nas Koło Naukowe Robotyki Cyborg++ (Wydział Mechatroniki PW), 19 stycznia 2011 r. - nawiązaliśmy kontakt z kołem naukowym Bionic na Wydziale Elektroniki
O badaniach nad SZTUCZNĄ INTELIGENCJĄ
 O badaniach nad SZTUCZNĄ INTELIGENCJĄ SZTUCZNA INTELIGENCJA dwa podstawowe znaczenia Co nazywamy sztuczną inteligencją? zaawansowane systemy informatyczne (np. uczące się), pewną dyscyplinę badawczą (dział
O badaniach nad SZTUCZNĄ INTELIGENCJĄ SZTUCZNA INTELIGENCJA dwa podstawowe znaczenia Co nazywamy sztuczną inteligencją? zaawansowane systemy informatyczne (np. uczące się), pewną dyscyplinę badawczą (dział
2014-10-15. Historia komputera. Architektura komputera Historia komputera. Historia komputera. Historia komputera. Historia komputera
 Architektura komputera dr inż. Tomasz Łukaszewski 1 2 500 p.n.e: pierwsze liczydło (abakus) Babilonia. 1614kostkiJohnaNapiera szkockiego matematyka pozwalające dodawać i odejmować 3 4 1621suwak logarytmicznyopracowany
Architektura komputera dr inż. Tomasz Łukaszewski 1 2 500 p.n.e: pierwsze liczydło (abakus) Babilonia. 1614kostkiJohnaNapiera szkockiego matematyka pozwalające dodawać i odejmować 3 4 1621suwak logarytmicznyopracowany
12:00 1 MAJA 2015, CZWARTEK
 Mój wymarzony zawód: 12:00 1 MAJA 2015, CZWARTEK Kacper Bukowski, Uczeń klasy III B Gimnazjum nr 164 z Oddziałami Integracyjnymi i Dwujęzycznymi im. Polskich Olimpijczyków w Warszawie www.kto-to-informatyk.pl
Mój wymarzony zawód: 12:00 1 MAJA 2015, CZWARTEK Kacper Bukowski, Uczeń klasy III B Gimnazjum nr 164 z Oddziałami Integracyjnymi i Dwujęzycznymi im. Polskich Olimpijczyków w Warszawie www.kto-to-informatyk.pl
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
1. Kto wymyślił określenie robot?
 1. Kto wymyślił określenie robot? 1. Izaak Asimov 2. Leonardo da Vinci 3. Karel Capek 4. Mityczny Hefajstos 2. Ile jest czujników linii w robocie MAOR-12v2? 1. 2 2. 4 3. 6 4. 8 3. Koło ISKRA powstało:
1. Kto wymyślił określenie robot? 1. Izaak Asimov 2. Leonardo da Vinci 3. Karel Capek 4. Mityczny Hefajstos 2. Ile jest czujników linii w robocie MAOR-12v2? 1. 2 2. 4 3. 6 4. 8 3. Koło ISKRA powstało:
Wstęp do robotyki. Plan wykładów. Wojciech Szynkiewicz. Plan wykładu... Plan wykładu... Instytut Automatyki i Informatyki Stosowanej PW
 Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Katedra Systemów Decyzyjnych. Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl
 Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Autonomia robotów. Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska
 Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
Wstęp do architektury komputerów
 Wstęp do architektury komputerów Podręczniki: Willians Stallings: Organizacja i architektura systemu komputerowego, WNT Notatki z wykładu: http://zefir.if.uj.edu.pl/planeta/wyklad_architektura.htm Egzamin:
Wstęp do architektury komputerów Podręczniki: Willians Stallings: Organizacja i architektura systemu komputerowego, WNT Notatki z wykładu: http://zefir.if.uj.edu.pl/planeta/wyklad_architektura.htm Egzamin:
Komputery. Komputery. Komputery PC i MAC Laptopy
 Komputery Komputery PC i MAC Laptopy 1 Spis treści: 1. Komputery PC i Mac...3 1.1 Komputer PC...3 1.2 Komputer Mac...3 2. Komputery przenośne...4 2.1 Laptop...4 2.2 Netbook...4 2.3 Tablet...5 3. Historia
Komputery Komputery PC i MAC Laptopy 1 Spis treści: 1. Komputery PC i Mac...3 1.1 Komputer PC...3 1.2 Komputer Mac...3 2. Komputery przenośne...4 2.1 Laptop...4 2.2 Netbook...4 2.3 Tablet...5 3. Historia
Algorytm. Krótka historia algorytmów
 Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
MindStorms SYMULACJE SPRZĘTOWE
 MindStorms SYMULACJE SPRZĘTOWE Marek Kasperski 16 V 2004 Część I Umysł wcielony? Rewolucja kognitywna Klasyczna AI: (szachy, programy decyzyjne, dowodzenie twierdzeń). Lata 70.: pojawiają się nauki kognitywne
MindStorms SYMULACJE SPRZĘTOWE Marek Kasperski 16 V 2004 Część I Umysł wcielony? Rewolucja kognitywna Klasyczna AI: (szachy, programy decyzyjne, dowodzenie twierdzeń). Lata 70.: pojawiają się nauki kognitywne
Kierunki Rozwoju Automatyzacji w Budownictwie
 Kierunki Rozwoju Automatyzacji w Budownictwie dr inż. Mirosław Chłosta Usytuowanie robotów budowlanych w grupie robotów przemysłowych 07-10.05.2016 dr inż. Mirosław Chłosta 2 vs Parametry procesu stałe
Kierunki Rozwoju Automatyzacji w Budownictwie dr inż. Mirosław Chłosta Usytuowanie robotów budowlanych w grupie robotów przemysłowych 07-10.05.2016 dr inż. Mirosław Chłosta 2 vs Parametry procesu stałe
studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1
 Dlaczego warto podjąć studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1 Automatyka i robotyka Konkurs punktów: język polski
Dlaczego warto podjąć studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1 Automatyka i robotyka Konkurs punktów: język polski
S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE
 KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
Architektura komputerów Historia systemów liczących
 Historia systemów liczących Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Historia systemów liczących Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Podstawy robotyki. Studia stacjonarne, AiR, II rok. Bartosz Kuczewski. PWSZ Gªogów, 2010
 Studia stacjonarne, AiR, II rok PWSZ Gªogów, 2010 Czym si b dziemy zajmowa? Wprowadzenie Tradycyjne metody opisu i analizy manipulatorów robotów transformaty homogeniczne metody opisu kinematyki manipulatorów
Studia stacjonarne, AiR, II rok PWSZ Gªogów, 2010 Czym si b dziemy zajmowa? Wprowadzenie Tradycyjne metody opisu i analizy manipulatorów robotów transformaty homogeniczne metody opisu kinematyki manipulatorów
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego. Paweł Rzucidło
 Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy: Polski Semestr 1 Fizyka
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy: Polski Semestr 1 Fizyka
JAKIE IDEE WPŁYNĘŁY NAJSILNIEJ NA ROZWÓJ I EWOLUCJĘ INFORMATYKI?
 JAKIE IDEE WPŁYNĘŁY NAJSILNIEJ NA ROZWÓJ I EWOLUCJĘ INFORMATYKI? Dlaczego dla informatyków ważne są liczby? Dlaczego dla informatyków ważne są liczby? bo w pamięci komputerów cyfrowych wszelkie dane (teksty,
JAKIE IDEE WPŁYNĘŁY NAJSILNIEJ NA ROZWÓJ I EWOLUCJĘ INFORMATYKI? Dlaczego dla informatyków ważne są liczby? Dlaczego dla informatyków ważne są liczby? bo w pamięci komputerów cyfrowych wszelkie dane (teksty,
Zastosowanie technologii montażu powierzchniowego oraz nowoczesnych systemów inspekcji optycznej w przemyśle elektronicznym.
 ZARZĄDZANIE I INŻYNIERIA PRODUKCJI Zastosowanie technologii montażu powierzchniowego oraz nowoczesnych systemów inspekcji optycznej w przemyśle elektronicznym. RYS HISTORICZNY ROZWOJU ELEKTRONIKI Elektronika
ZARZĄDZANIE I INŻYNIERIA PRODUKCJI Zastosowanie technologii montażu powierzchniowego oraz nowoczesnych systemów inspekcji optycznej w przemyśle elektronicznym. RYS HISTORICZNY ROZWOJU ELEKTRONIKI Elektronika
Sztuczna inteligencja stan wiedzy, perspektywy rozwoju i problemy etyczne. Piotr Bilski Instytut Radioelektroniki i Technik Multimedialnych
 Sztuczna inteligencja stan wiedzy, perspektywy rozwoju i problemy etyczne Piotr Bilski Instytut Radioelektroniki i Technik Multimedialnych Plan wystąpienia Co to jest sztuczna inteligencja? Pojęcie słabej
Sztuczna inteligencja stan wiedzy, perspektywy rozwoju i problemy etyczne Piotr Bilski Instytut Radioelektroniki i Technik Multimedialnych Plan wystąpienia Co to jest sztuczna inteligencja? Pojęcie słabej
WYDZIAŁ MECHANICZNY. Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2017/2018
 WYDZIAŁ MECHANICZNY automatyka i robotyka energetyka inżynieria materiałowa inżynieria produkcji nie przewiduje się przeprowadzania rozmowy kwalifikacyjnej mechanika i budowa maszyn mechatronika transport
WYDZIAŁ MECHANICZNY automatyka i robotyka energetyka inżynieria materiałowa inżynieria produkcji nie przewiduje się przeprowadzania rozmowy kwalifikacyjnej mechanika i budowa maszyn mechatronika transport
Jak liczono dawniej? 1
 Jak liczono dawniej? 1 SPIS TREŚCI PALCE... 3 KAMIENIE... 4 SYSTEM KARBOWY... 5 ABAKUS:... 6 MECHANICZNY KALKULATOR LEONARDA DA VINCI:... 7 TABLICE NAPIERA:... 8 SUWAK LOGARYTMICZNY:... 9 MECHANICZNY KALKULATOR
Jak liczono dawniej? 1 SPIS TREŚCI PALCE... 3 KAMIENIE... 4 SYSTEM KARBOWY... 5 ABAKUS:... 6 MECHANICZNY KALKULATOR LEONARDA DA VINCI:... 7 TABLICE NAPIERA:... 8 SUWAK LOGARYTMICZNY:... 9 MECHANICZNY KALKULATOR
Elementy historii INFORMATYKI
 Elementy historii INFORMATYKI Wykład 2. Elementy historii informatyki HISTORIA INFORMATYKI HISTORIA KOMPUTERÓW Wykład 2. Elementy historii informatyki Prehistoria informatyki: PASCAL i LEIBNIZ (1623 1662)
Elementy historii INFORMATYKI Wykład 2. Elementy historii informatyki HISTORIA INFORMATYKI HISTORIA KOMPUTERÓW Wykład 2. Elementy historii informatyki Prehistoria informatyki: PASCAL i LEIBNIZ (1623 1662)
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok
 Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
ROBOTYKA I SYSTEMY DECYZYJNE
 POLITECHIK GDŃSK SPECJLOŚĆ ROBOTYK I SYSTEMY DECYZYJE prof. dr hab. inż. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych i Robotyki Wydział Elektroniki Telekomunikacji i Informatyki Oczekiwania względem
POLITECHIK GDŃSK SPECJLOŚĆ ROBOTYK I SYSTEMY DECYZYJE prof. dr hab. inż. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych i Robotyki Wydział Elektroniki Telekomunikacji i Informatyki Oczekiwania względem
Modelarstwo Rodzaje modelarstwa: Redukcyjne
 Modelarstwo Modelarstwo to tworzenie z różnych materiałów (karton, drewno, tworzywo sztuczne, metal) modeli obiektów istniejących w rzeczywistości. Mogą to być modele statków, samolotów, pojazdów. Modele
Modelarstwo Modelarstwo to tworzenie z różnych materiałów (karton, drewno, tworzywo sztuczne, metal) modeli obiektów istniejących w rzeczywistości. Mogą to być modele statków, samolotów, pojazdów. Modele
Czy B-droid zastąpi pszczoły w zapylaniu roślin?
 .pl https://www..pl Czy B-droid zastąpi pszczoły w zapylaniu roślin? Autor: Tomasz Kodłubański Data: 24 lutego 2016 Wiemy, jakim zagrożeniem dla plonów na polach na całym świecie jest obserwowana od ponad
.pl https://www..pl Czy B-droid zastąpi pszczoły w zapylaniu roślin? Autor: Tomasz Kodłubański Data: 24 lutego 2016 Wiemy, jakim zagrożeniem dla plonów na polach na całym świecie jest obserwowana od ponad
Naukowe Koło Nowoczesnych Technologii
 Naukowe Koło Nowoczesnych Technologii Naukowe Koło Nowoczesnych Technologii Opiekun: dr hab., prof. ndzw. Tadeusz Szumiata Przewodniczący: Mateusz Staszewski, MiBM semestr IV Poszczególne dziedziny działań
Naukowe Koło Nowoczesnych Technologii Naukowe Koło Nowoczesnych Technologii Opiekun: dr hab., prof. ndzw. Tadeusz Szumiata Przewodniczący: Mateusz Staszewski, MiBM semestr IV Poszczególne dziedziny działań
Informatyka. Prowadzący: Dr inż. Sławomir Samolej D102 C, tel: 865 1766, email: ssamolej@prz-rzeszow.pl WWW: ssamolej.prz-rzeszow.
 Informatyka Prowadzący: Dr inż. Sławomir Samolej D102 C, tel: 865 1766, email: ssamolej@prz-rzeszow.pl WWW: ssamolej.prz-rzeszow.pl 1 Program zajęć Wykład: Wprowadzenie Budowa i działanie sprzętu komputerowego
Informatyka Prowadzący: Dr inż. Sławomir Samolej D102 C, tel: 865 1766, email: ssamolej@prz-rzeszow.pl WWW: ssamolej.prz-rzeszow.pl 1 Program zajęć Wykład: Wprowadzenie Budowa i działanie sprzętu komputerowego
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Studia niestacjonarne inżynierskie
 Studia niestacjonarne inżynierskie") Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 1W Matematyka 1 4 72 36 36 0 0 0 18 18 6 18 18 6 2W Fizyka 1 3 36 18 18 0 0 0 18 18 6 3W
Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 1W Matematyka 1 4 72 36 36 0 0 0 18 18 6 18 18 6 2W Fizyka 1 3 36 18 18 0 0 0 18 18 6 3W
Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Studia stacjonarne inżynierskie
 Studia stacjonarne inżynierskie") Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 W C L S P ECTS 1W Matematyka 1 4 120 60 60 0 0 0 30 30 6 30 30 6 2W Fizyka 1 3 90 30 30 30
Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 W C L S P ECTS 1W Matematyka 1 4 120 60 60 0 0 0 30 30 6 30 30 6 2W Fizyka 1 3 90 30 30 30
Tytuł prezentacji. Autorzy
 Wrocław, 30 marca 2017 Plan prezentacji 1 Wprowadzenie 2 Czy robot??? 3 Wzór i figur 4 Inne Nagłówek slajdu Przykład najprostszego slajdu z wypunktowaniem: tekst pierwszego punktu Nagłówek slajdu Przykład
Wrocław, 30 marca 2017 Plan prezentacji 1 Wprowadzenie 2 Czy robot??? 3 Wzór i figur 4 Inne Nagłówek slajdu Przykład najprostszego slajdu z wypunktowaniem: tekst pierwszego punktu Nagłówek slajdu Przykład
O badaniach nad SZTUCZNĄ INTELIGENCJĄ
 O badaniach nad SZTUCZNĄ INTELIGENCJĄ Jak określa się inteligencję naturalną? Jak określa się inteligencję naturalną? Inteligencja wg psychologów to: Przyrodzona, choć rozwijana w toku dojrzewania i uczenia
O badaniach nad SZTUCZNĄ INTELIGENCJĄ Jak określa się inteligencję naturalną? Jak określa się inteligencję naturalną? Inteligencja wg psychologów to: Przyrodzona, choć rozwijana w toku dojrzewania i uczenia
Mózg a ciało gdzie siedzi inteligencja?
 Mózg a ciało gdzie siedzi inteligencja? Konrad Miazga Poznan University of Technology Poznań, 2016 Konrad Miazga (PUT, FC) Mózg a ciało gdzie siedzi inteligencja? Poznań, 2016 1 / 12 Mózg w słoiku mózg
Mózg a ciało gdzie siedzi inteligencja? Konrad Miazga Poznan University of Technology Poznań, 2016 Konrad Miazga (PUT, FC) Mózg a ciało gdzie siedzi inteligencja? Poznań, 2016 1 / 12 Mózg w słoiku mózg
Wprowadzenie do teorii systemów ekspertowych
 Myślące komputery przyszłość czy utopia? Wprowadzenie do teorii systemów ekspertowych Roman Simiński siminski@us.edu.pl Wizja inteligentnych maszyn jest od wielu lat obecna w literaturze oraz filmach z
Myślące komputery przyszłość czy utopia? Wprowadzenie do teorii systemów ekspertowych Roman Simiński siminski@us.edu.pl Wizja inteligentnych maszyn jest od wielu lat obecna w literaturze oraz filmach z
Inteligencja. Władysław Kopaliśki, Słownik wyrazów obcych i zwrotów obcojęzycznych
 Wstęp Inteligencja Władysław Kopaliśki, Słownik wyrazów obcych i zwrotów obcojęzycznych inteligencja psych. zdolność rozumienia, kojarzenia; pojętność, bystrość; zdolność znajdowania właściwych, celowych
Wstęp Inteligencja Władysław Kopaliśki, Słownik wyrazów obcych i zwrotów obcojęzycznych inteligencja psych. zdolność rozumienia, kojarzenia; pojętność, bystrość; zdolność znajdowania właściwych, celowych
Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2019/2020
 Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2019/2020 Kierunek Zakres rozmowy kwalifikacyjnej obejmuje: Advanced Mechanical Engineering (język
Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2019/2020 Kierunek Zakres rozmowy kwalifikacyjnej obejmuje: Advanced Mechanical Engineering (język
Jako pierwszych do liczenia używano palców.
 Jako pierwszych do liczenia używano palców. Kolejnymi przedmiotami do liczenia były kamienie. Małe, okrągłe kamyki mogły być używane do wyrażania większych liczb niż starcza na to palców, a posiadały one
Jako pierwszych do liczenia używano palców. Kolejnymi przedmiotami do liczenia były kamienie. Małe, okrągłe kamyki mogły być używane do wyrażania większych liczb niż starcza na to palców, a posiadały one
algorytm przepis rozwiązania przedstawionego zadania komputer urządzenie, za pomocą którego wykonywane są algorytmy
 Podstawowe pojęcia związane z informatyką: informatyka dziedzina wiedzy i działalności zajmująca się gromadzeniem, przetwarzaniem i wykorzystywaniem informacji, czyli różnego rodzaju danych o otaczającej
Podstawowe pojęcia związane z informatyką: informatyka dziedzina wiedzy i działalności zajmująca się gromadzeniem, przetwarzaniem i wykorzystywaniem informacji, czyli różnego rodzaju danych o otaczającej
Mechatronika i inteligentne systemy produkcyjne. Paweł Pełczyński ppelczynski@swspiz.pl
 Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
Tabela odniesień efektów kierunkowych do efektów obszarowych
 Umiejscowienie kierunku w obszarze kształcenia Kierunek automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika i budowa
Umiejscowienie kierunku w obszarze kształcenia Kierunek automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika i budowa
Zdalne sterowanie i autonomia pojazdów - wyzwania dla mechatroniki i robotyki
 Zdalne sterowanie i autonomia pojazdów - wyzwania dla mechatroniki i robotyki dr hab. inż. Grzegorz Granosik, Politechnika Łódzka W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie
Zdalne sterowanie i autonomia pojazdów - wyzwania dla mechatroniki i robotyki dr hab. inż. Grzegorz Granosik, Politechnika Łódzka W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie
Badania Amerykanie prowadzą. została w satelicie Sputnik 2. w NASA (Narodowej Agencji. Amerykańscy naukowcy. kosmicznej.
 karta pracy nr 1 (część 3, grupa 1) kwiecień 1961 Gagarin lipiec 1958 NASA Nikt nie wiedział, czy Gagarin przeżyje tę misję. Sputnik1 wystrzelili na orbitę naukowcy ze Związku Radzieckiego. Amerykańscy
karta pracy nr 1 (część 3, grupa 1) kwiecień 1961 Gagarin lipiec 1958 NASA Nikt nie wiedział, czy Gagarin przeżyje tę misję. Sputnik1 wystrzelili na orbitę naukowcy ze Związku Radzieckiego. Amerykańscy
WYDZIAŁ MECHANICZNY. Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2018/2019
 WYDZIAŁ MECHANICZNY Kandydat powinien posiadać umiejętności z języka obcego na poziomie B2 Europejskiego Systemu Opisu Kształcenia Językowego, pozwalające mu na czynne uczestnictwo w wybranych zajęciach
WYDZIAŁ MECHANICZNY Kandydat powinien posiadać umiejętności z języka obcego na poziomie B2 Europejskiego Systemu Opisu Kształcenia Językowego, pozwalające mu na czynne uczestnictwo w wybranych zajęciach
Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność:
 Załącznik 3 Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność: Lp. Nazwa przedmiotu Liczba godzin w semestrze Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 E Z Σh
Załącznik 3 Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność: Lp. Nazwa przedmiotu Liczba godzin w semestrze Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 E Z Σh
Podsumowanie wyników ankiety
 SPRAWOZDANIE Kierunkowego Zespołu ds. Programów Kształcenia dla kierunku Informatyka dotyczące ankiet samooceny osiągnięcia przez absolwentów kierunkowych efektów kształcenia po ukończeniu studiów w roku
SPRAWOZDANIE Kierunkowego Zespołu ds. Programów Kształcenia dla kierunku Informatyka dotyczące ankiet samooceny osiągnięcia przez absolwentów kierunkowych efektów kształcenia po ukończeniu studiów w roku
BIOCYBERNETYKA PROLOG
 Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej BIOCYBERNETYKA Adrian Horzyk PROLOG www.agh.edu.pl Pewnego dnia przyszedł na świat komputer Komputery
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej BIOCYBERNETYKA Adrian Horzyk PROLOG www.agh.edu.pl Pewnego dnia przyszedł na świat komputer Komputery
Algorytm. Krótka historia algorytmów
 Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
O badaniach nad SZTUCZNĄ INTELIGENCJĄ
 O badaniach nad SZTUCZNĄ INTELIGENCJĄ Wykład 7. O badaniach nad sztuczną inteligencją Co nazywamy SZTUCZNĄ INTELIGENCJĄ? szczególny rodzaj programów komputerowych, a niekiedy maszyn. SI szczególną własność
O badaniach nad SZTUCZNĄ INTELIGENCJĄ Wykład 7. O badaniach nad sztuczną inteligencją Co nazywamy SZTUCZNĄ INTELIGENCJĄ? szczególny rodzaj programów komputerowych, a niekiedy maszyn. SI szczególną własność
Scenariusz lekcji. omówić dokonania w dziedzinie przetwarzania informacji do XIX wieku;
 Scenariusz lekcji 1 TEMAT LEKCJI Historia informacji 2 CELE LEKCJI 2.1 Wiadomości Uczeń potrafi: omówić dokonania w dziedzinie przetwarzania informacji do XIX wieku; omówić działanie i zastosowanie pierwszych
Scenariusz lekcji 1 TEMAT LEKCJI Historia informacji 2 CELE LEKCJI 2.1 Wiadomości Uczeń potrafi: omówić dokonania w dziedzinie przetwarzania informacji do XIX wieku; omówić działanie i zastosowanie pierwszych
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
HISTORIA KOMPUTERÓW 2015/16. Bartosz Klin. klin@mimuw.edu.pl http://www.mimuw.edu.pl/~klin/
 HISTORIA KOMPUTERÓW 2015/16 Bartosz Klin klin@mimuw.edu.pl http://www.mimuw.edu.pl/~klin/ Oś czasu Pascal Leibniz de Colmar Babbage 1600 1700 1800 1900 Pinwheel (wiatraczek) - alternatywa dla kół Leibniza
HISTORIA KOMPUTERÓW 2015/16 Bartosz Klin klin@mimuw.edu.pl http://www.mimuw.edu.pl/~klin/ Oś czasu Pascal Leibniz de Colmar Babbage 1600 1700 1800 1900 Pinwheel (wiatraczek) - alternatywa dla kół Leibniza
Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy: Polski Semestr 1 RME-1-103-s Podstawy
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy: Polski Semestr 1 RME-1-103-s Podstawy
Lot na Księżyc. Misja Apollo 11
 Lot na Księżyc. Misja Apollo 11 Wydział Fizyki i Astronomii Uniwersytetu Zielonogórskiego WFiA UZ 1 / 14 Program Apollo wyścig kosmiczny (wyścig zbrojeń, zimna wojna) pomiędzy USA i ZSRR cel: przejęcie
Lot na Księżyc. Misja Apollo 11 Wydział Fizyki i Astronomii Uniwersytetu Zielonogórskiego WFiA UZ 1 / 14 Program Apollo wyścig kosmiczny (wyścig zbrojeń, zimna wojna) pomiędzy USA i ZSRR cel: przejęcie
Automatyka i Robotyka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów.
 Kierunek Nazwisko dyplomanta Specyfikacja tematu Specjalne kwalifikacje osoby realizującej pracę dr inż. Dariusz Marchewka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów. Maksymilian
Kierunek Nazwisko dyplomanta Specyfikacja tematu Specjalne kwalifikacje osoby realizującej pracę dr inż. Dariusz Marchewka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów. Maksymilian
MIND-BODY PROBLEM. i nowe nadzieje dla chrześcijańskiej antropologii
 MIND-BODY PROBLEM i nowe nadzieje dla chrześcijańskiej antropologii CZŁOWIEK JEST MASZYNĄ (THOMAS HOBBES) Rozumienie człowieka znacząco zmienia się wraz z nastaniem epoki nowożytnej. Starożytne i średniowieczne
MIND-BODY PROBLEM i nowe nadzieje dla chrześcijańskiej antropologii CZŁOWIEK JEST MASZYNĄ (THOMAS HOBBES) Rozumienie człowieka znacząco zmienia się wraz z nastaniem epoki nowożytnej. Starożytne i średniowieczne
Plan studiów dla kierunku: ELEKTROTECHNIKA Studia niestacjonarne inżynierskie
 Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 1W Matematyka 1 4 72 36 36 0 0 0 18 18 6 18 18 6 2W Fizyka 1 2 36 18 18 0 0 0 18 18 6 3W Informatyka 4W Rysunek techniczny 5W Podstawy ekonomii 1 18 18 0
Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 1W Matematyka 1 4 72 36 36 0 0 0 18 18 6 18 18 6 2W Fizyka 1 2 36 18 18 0 0 0 18 18 6 3W Informatyka 4W Rysunek techniczny 5W Podstawy ekonomii 1 18 18 0
Historia maszyn liczących
 Historia maszyn liczących pierwsze potrzeby liczenia już w czasach, kiedy ludzie żyli w jaskiniach i lasach (religia, jesienne zbiory). Zaczęto liczyć nacięcia na drewnie, znaki na ścianach pierwszy kalendarz
Historia maszyn liczących pierwsze potrzeby liczenia już w czasach, kiedy ludzie żyli w jaskiniach i lasach (religia, jesienne zbiory). Zaczęto liczyć nacięcia na drewnie, znaki na ścianach pierwszy kalendarz
Budowa pierwszych komputerów i ich zastosowanie w matematyce
 Budowa pierwszych komputerów i ich zastosowanie w matematyce Aleksander Byglewski Jarosław Rolski Jakub Zbrzezny Krótki kurs historii matematyki Wydział Matematyki i Nauk Informacyjnych Politechnika Warszawska
Budowa pierwszych komputerów i ich zastosowanie w matematyce Aleksander Byglewski Jarosław Rolski Jakub Zbrzezny Krótki kurs historii matematyki Wydział Matematyki i Nauk Informacyjnych Politechnika Warszawska
PLAN STUDIÓW NIESTACJONARNYCH I STOPNIA (ZAOCZNE)
") Zał. nr 3 do uchwały nr 75/009 Rady Wydziału Elektrycznego PB z dnia 4.09.009 r. POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY PLAN STUDIÓW NIESTACJONARNYCH I STOPNIA (ZAOCZNE) kierunek studiów ELEKTROTECHNIKA
Zał. nr 3 do uchwały nr 75/009 Rady Wydziału Elektrycznego PB z dnia 4.09.009 r. POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY PLAN STUDIÓW NIESTACJONARNYCH I STOPNIA (ZAOCZNE) kierunek studiów ELEKTROTECHNIKA
Historia komputerów. Szkoła Podstawowa nr 8 im. Jana Wyżykowskiego w Lubinie
 Historia komputerów Informatyka - dziedzina nauki, która zajmuje się przetwarzaniem informacji przy pomocy komputerów i odpowiedniego oprogramowania. Historia informatyki: Pierwszymi narzędziami, które
Historia komputerów Informatyka - dziedzina nauki, która zajmuje się przetwarzaniem informacji przy pomocy komputerów i odpowiedniego oprogramowania. Historia informatyki: Pierwszymi narzędziami, które
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy:
Przeszłość i przyszłość informatyki
 Przeszłość i przyszłość informatyki Rodzaj zajęć: Wszechnica Popołudniowa Tytuł: Przeszłość i przyszłość informatyki Autor: prof. dr hab. Maciej M Sysło Redaktor merytoryczny: prof. dr hab. Maciej M Sysło
Przeszłość i przyszłość informatyki Rodzaj zajęć: Wszechnica Popołudniowa Tytuł: Przeszłość i przyszłość informatyki Autor: prof. dr hab. Maciej M Sysło Redaktor merytoryczny: prof. dr hab. Maciej M Sysło
Technologie Informacyjne
 page.1 Technologie Informacyjne Wersja: 4 z drobnymi modyfikacjami! Wojciech Myszka 2013-10-14 20:04:01 +0200 page.2 Cel zajęć Cele zajęć: Uaktualnienie i ujednolicenie wiedzy/terminologii oraz zdobycie
page.1 Technologie Informacyjne Wersja: 4 z drobnymi modyfikacjami! Wojciech Myszka 2013-10-14 20:04:01 +0200 page.2 Cel zajęć Cele zajęć: Uaktualnienie i ujednolicenie wiedzy/terminologii oraz zdobycie
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2014/2015 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2014/2015 Język wykładowy:
Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie
 Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 W C L S P ECTS 1W Matematyka 1 4 120 60 60 0 0 0 30 30 6 30 30 6 2W Fizyka 1 3 90 30 30 30 0 0 30 30 30 6 3W Informatyka 2 60 30 0 30 0 0 30 30 6 4W Rysunek
Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 W C L S P ECTS 1W Matematyka 1 4 120 60 60 0 0 0 30 30 6 30 30 6 2W Fizyka 1 3 90 30 30 30 0 0 30 30 30 6 3W Informatyka 2 60 30 0 30 0 0 30 30 6 4W Rysunek
Kursy pozalekcyjne z budowy i programowania robotów dla dzieci i młodzieży
 Kursy pozalekcyjne z budowy i programowania robotów dla dzieci i młodzieży Budowanie robotów + Nauka Programowania + Dobra zabawa i konkursy Warsztaty TwojRobot.pl to nauka budowy i programowania robotów
Kursy pozalekcyjne z budowy i programowania robotów dla dzieci i młodzieży Budowanie robotów + Nauka Programowania + Dobra zabawa i konkursy Warsztaty TwojRobot.pl to nauka budowy i programowania robotów
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
Kierunek: Inżynieria Obliczeniowa Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Metali i Informatyki Przemysłowej Kierunek: Inżynieria Obliczeniowa Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy: Polski Semestr
Wydział: Inżynierii Metali i Informatyki Przemysłowej Kierunek: Inżynieria Obliczeniowa Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy: Polski Semestr
OFERTA ZAJĘĆ Z ROBOTYKI I PROGRAMOWANIA DLA SZKÓŁ PODSTAWOWYCH ORAZ GIMNAZJALNYCH
 OFERTA ZAJĘĆ Z ROBOTYKI I PROGRAMOWANIA DLA SZKÓŁ PODSTAWOWYCH ORAZ GIMNAZJALNYCH O Nas Firma Nowoczesny Wymiar Edukacji - Warsztat Robotów, to projekt stworzony i realizowany przez młodych inżynierów,
OFERTA ZAJĘĆ Z ROBOTYKI I PROGRAMOWANIA DLA SZKÓŁ PODSTAWOWYCH ORAZ GIMNAZJALNYCH O Nas Firma Nowoczesny Wymiar Edukacji - Warsztat Robotów, to projekt stworzony i realizowany przez młodych inżynierów,
Warsztaty robotyki LEGO dla klas IV-VI
 Warsztaty robotyki LEGO dla klas IV-VI Uczniów klas IV-VI już od października zapraszamy serdecznie na warsztaty robotyki LEGO. Zajęcia pozwalają dzieciom nie tylko na zdobycie szerokiej wiedzy technicznej,
Warsztaty robotyki LEGO dla klas IV-VI Uczniów klas IV-VI już od października zapraszamy serdecznie na warsztaty robotyki LEGO. Zajęcia pozwalają dzieciom nie tylko na zdobycie szerokiej wiedzy technicznej,
Podstawy Mechatroniki Literatura
 Podstawy Mechatroniki Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki
Podstawy Mechatroniki Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki
UCHWAŁA NR 26/2016. SENATU AKADEMII MARYNARKI WOJENNEJ im. Bohaterów Westerplatte z dnia 02 czerwca 2016 roku
 UCHWAŁA NR 26/2016 SENATU AKADEMII MARYNARKI WOJENNEJ im. Bohaterów Westerplatte z dnia 02 czerwca 2016 roku w sprawie: określenia efektów kształcenia dla kierunku Mechatronika studia II stopnia o profilu
UCHWAŁA NR 26/2016 SENATU AKADEMII MARYNARKI WOJENNEJ im. Bohaterów Westerplatte z dnia 02 czerwca 2016 roku w sprawie: określenia efektów kształcenia dla kierunku Mechatronika studia II stopnia o profilu
Drony w służbie energetyki
 Drony w służbie energetyki Autor: Krzysztof Hajdrowski - Enea Operator Sp. z o. o. ("Energia Elektryczna" - lipiec 2014) Postęp technologii sprawił, że niegdysiejsze amatorskie pojazdy sterowane zdalnie
Drony w służbie energetyki Autor: Krzysztof Hajdrowski - Enea Operator Sp. z o. o. ("Energia Elektryczna" - lipiec 2014) Postęp technologii sprawił, że niegdysiejsze amatorskie pojazdy sterowane zdalnie
Sztuczna inteligencja
 POLITECHNIKA KRAKOWSKA WIEiK KATEDRA AUTOMATYKI I TECHNIK INFORMACYJNYCH Sztuczna inteligencja www.pk.edu.pl/~zk/si_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 1: Wprowadzenie do
POLITECHNIKA KRAKOWSKA WIEiK KATEDRA AUTOMATYKI I TECHNIK INFORMACYJNYCH Sztuczna inteligencja www.pk.edu.pl/~zk/si_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 1: Wprowadzenie do
Algorytm. Słowo algorytm pochodzi od perskiego matematyka Mohammed ibn Musa al-kowarizimi (Algorismus - łacina) z IX w. ne.
 z IX w. ne.") Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Sztuczna inteligencja,
 Sztuczna inteligencja, czy sztucznie inteligentne? Dawid Laszuk 23.05.2009r. Copyright statement This presentation has been prepared for the meeting of the Students' Society of Neurobiology at the Warsaw
Sztuczna inteligencja, czy sztucznie inteligentne? Dawid Laszuk 23.05.2009r. Copyright statement This presentation has been prepared for the meeting of the Students' Society of Neurobiology at the Warsaw
Alan M. TURING. Matematyk u progu współczesnej informatyki
 Alan M. TURING n=0 1 n! Matematyk u progu współczesnej informatyki Wykład 5. Alan Turing u progu współczesnej informatyki O co pytał Alan TURING? Czym jest algorytm? Czy wszystkie problemy da się rozwiązać
Alan M. TURING n=0 1 n! Matematyk u progu współczesnej informatyki Wykład 5. Alan Turing u progu współczesnej informatyki O co pytał Alan TURING? Czym jest algorytm? Czy wszystkie problemy da się rozwiązać
Technika mikroprocesorowa
 Technika mikroprocesorowa zajmuje się przetwarzaniem danych w oparciu o cyfrowe programowalne układy scalone. Systemy przetwarzające dane w oparciu o takie układy nazywane są systemami mikroprocesorowymi
Technika mikroprocesorowa zajmuje się przetwarzaniem danych w oparciu o cyfrowe programowalne układy scalone. Systemy przetwarzające dane w oparciu o takie układy nazywane są systemami mikroprocesorowymi
PODLASKIE PARTNERSTWO SEKTORA BIZNESU I INSTYTUCJI EDUKACYJNYCH
 PODLASKIE PARTNERSTWO SEKTORA BIZNESU I INSTYTUCJI EDUKACYJNYCH CZYM JEST PROGRAM ODKRYWCY DIAMENTÓW - dofinansowania projektów zespołów uczniowskich z woj. podlaskiego z zakresu nauk ścisłych, technologii,
PODLASKIE PARTNERSTWO SEKTORA BIZNESU I INSTYTUCJI EDUKACYJNYCH CZYM JEST PROGRAM ODKRYWCY DIAMENTÓW - dofinansowania projektów zespołów uczniowskich z woj. podlaskiego z zakresu nauk ścisłych, technologii,
witamy w świecie KUKA Robotics Robotyzacja według KUKA Roboter KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła Strona 1
 witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2018/2019 WYDZIAŁ MECHANICZNY
 WYDZIAŁ MECHANICZNY Kandydat powinien posiadać umiejętności z języka obcego na poziomie B2 Europejskiego Systemu Opisu Kształcenia Językowego, pozwalające mu na czynne uczestnictwo w wybranych zajęciach
WYDZIAŁ MECHANICZNY Kandydat powinien posiadać umiejętności z języka obcego na poziomie B2 Europejskiego Systemu Opisu Kształcenia Językowego, pozwalające mu na czynne uczestnictwo w wybranych zajęciach
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
a) Szczegółowe efekty kształcenia i ich odniesienie do opisu efektów
 Szczegółowe efekty kształcenia i ich odniesienie do opisu efektów") 1. PROGRAM KSZTAŁCENIA 1) OPIS EFEKTÓW KSZTAŁCENIA a) Szczegółowe efekty kształcenia i ich odniesienie do opisu efektów kształcenia dla obszaru nauk społecznych i technicznych Objaśnienie oznaczeń: I efekty
1. PROGRAM KSZTAŁCENIA 1) OPIS EFEKTÓW KSZTAŁCENIA a) Szczegółowe efekty kształcenia i ich odniesienie do opisu efektów kształcenia dla obszaru nauk społecznych i technicznych Objaśnienie oznaczeń: I efekty
Efekt kształcenia. Ma uporządkowaną, podbudowaną teoretycznie wiedzę ogólną w zakresie algorytmów i ich złożoności obliczeniowej.
 Efekty dla studiów pierwszego stopnia profil ogólnoakademicki na kierunku Informatyka w języku polskim i w języku angielskim (Computer Science) na Wydziale Matematyki i Nauk Informacyjnych, gdzie: * Odniesienie-
Efekty dla studiów pierwszego stopnia profil ogólnoakademicki na kierunku Informatyka w języku polskim i w języku angielskim (Computer Science) na Wydziale Matematyki i Nauk Informacyjnych, gdzie: * Odniesienie-
Dydaktyka Informatyki budowa i zasady działania komputera
 Dydaktyka Informatyki budowa i zasady działania komputera Instytut Matematyki Uniwersytet Gdański System komputerowy System komputerowy układ współdziałania dwóch składowych: szprzętu komputerowego oraz
Dydaktyka Informatyki budowa i zasady działania komputera Instytut Matematyki Uniwersytet Gdański System komputerowy System komputerowy układ współdziałania dwóch składowych: szprzętu komputerowego oraz
Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2017/2018 WYDZIAŁ MECHANICZNY
 WYDZIAŁ MECHANICZNY mechanika i budowa maszyn 1 WYDZIAŁ ELEKTROTECHNIKI, ELEKTRONIKI, INFORMATYKI I AUTOMATYKI automatyka i robotyka elektronika i telekomunikacja elektrotechnika energetyka informatyka
WYDZIAŁ MECHANICZNY mechanika i budowa maszyn 1 WYDZIAŁ ELEKTROTECHNIKI, ELEKTRONIKI, INFORMATYKI I AUTOMATYKI automatyka i robotyka elektronika i telekomunikacja elektrotechnika energetyka informatyka
Historia informatyki
 Spis treści 1 CZYM JEST INFORMATYKA... - 2-1.1 DEFINICJE INFORMATYKI...- 2-1.2 POJĘCIA ZWIĄZANE Z INFORMATYKĄ...- 2-2 ELEMENTY HISTORII INFORMATYKI... - 2-2.1 OD STAROŻYTNOŚCI DO ŚREDNIOWIECZA...- 2-2.2
Spis treści 1 CZYM JEST INFORMATYKA... - 2-1.1 DEFINICJE INFORMATYKI...- 2-1.2 POJĘCIA ZWIĄZANE Z INFORMATYKĄ...- 2-2 ELEMENTY HISTORII INFORMATYKI... - 2-2.1 OD STAROŻYTNOŚCI DO ŚREDNIOWIECZA...- 2-2.2
Kierunek: Informatyka Stosowana Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. audytoryjne. Wykład Ćwiczenia
 Wydział: Geologii, Geofizyki i Ochrony Środowiska Kierunek: Informatyka Stosowana Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2018/2019 Język wykładowy: Polski Semestr 1
Wydział: Geologii, Geofizyki i Ochrony Środowiska Kierunek: Informatyka Stosowana Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2018/2019 Język wykładowy: Polski Semestr 1
Oferta badawcza Politechniki Gdańskiej dla przedsiębiorstw
 KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach