Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok
|
|
|
- Mirosław Małek
- 9 lat temu
- Przeglądów:
Transkrypt

1
2 Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto starania o uzyskanie międzynarodowej ochrony dla nazwy mechatronics jako znaku towarowego (z ochrony tej nazwy zrezygnowano w roku 1982).

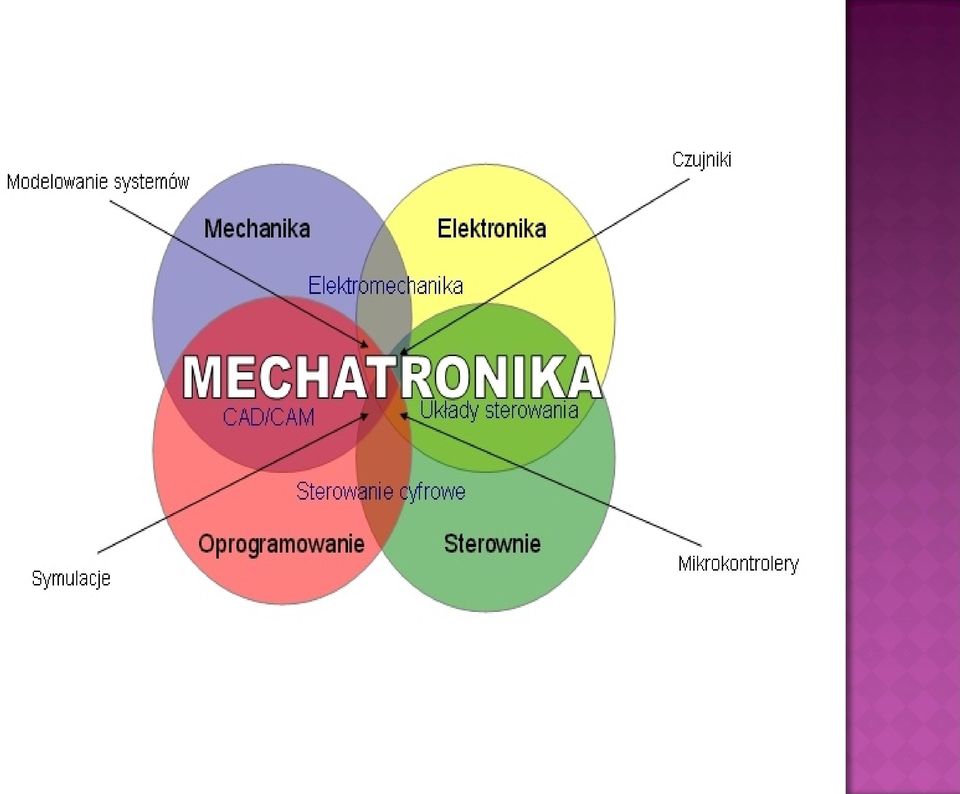
3 Mechatronika to nauka istniejąca na styku dziedzin takich jak: mechanika, elektronika, sterowanie i informatyka.

4

5 OBJAŚNIENIA JEJ FUNKCJI
6 Zasadnicza linia podziału przebiega pomiędzy zrozumieniem jej jako metodologii, a uznaniem jako nowej dyscypliny w inżynierii i nauce.

7 Według wybranych przykładów mechatronika jest: obszarem studiów łączącym zasady inżynierii mechanicznej, elektrycznej i komputerowej, metodyką optymalizującą projektowanie urządzeń elektromechanicznych, filozofią w zakresie projektowania, która wykorzystuje synergiczną integrację mechaniki, elektroniki i technik komputerowych dla otrzymywania zaawansowanych technologicznie urządzeń i systemów,

8 4. interdyscyplinarnym obszarem inżynierii zajmującym się projektowaniem urządzeń których funkcje związane są z integracją mechaniki z elementami elektroniki, skoordynowanymi w ramach określonego systemu sterowania, 5.technologią która łączy mechanikę, elektronikę i informatykę dla stworzenia funkcjonalnego współdziałania i przestrzennej integracji komponentów, modułów i systemów w jedną całość.

9 Mechatronika jest synergicznym połączeniem mechaniki precyzyjnej, elektronicznych układów sterujących i informatyki w celu projektowania, wytwarzania i eksploatacji inteligentnych systemów automatyki. Synergicznym, czyli takim, którego możliwości łączne są większe niż suma możliwości elementów składowych.


10 Mechatronika zaczęła się dynamicznie rozwijać dopiero w latach osiemdziesiątych i to głównie ze względu na wymagania rynku. Elementy elektryczne i elektroniczne w układach mechanicznych zaczęto wprowadzać już w latach czterdziestych a urządzenia z tego okresu można nazwać pierwszą generacją mechatroniki

11 Rozwój informatyki od początku lat siedemdziesiątych spowodował, że logiczne i decyzyjne elementy elektroniczne zaczęto zastępować mikroprocesorami z odpowiednim oprogramowaniem. Etap ten można uznać za drugą generację mechatroniki

12 Lata osiemdziesiąte przyniosły dalszy jej rozwój, zmierzający w kierunku uzyskania zintegrowanych elementów zapewniających funkcjonowanie skomplikowanych urządzeń, maszyn i systemów. Zapoczątkowało to rozwój mechatroniki trzeciej generacji, przedmiotem zainteresowania której są urządzenia charakteryzujące się wielofunkcyjnością i dużą złożonością konstrukcji.


13 Uważa się, że pierwszym urządzeniem mechatronicznym była obrabiarka sterowana numerycznie (CNC) do produkcji śmigieł helikoptera, skonstruowana w Massachusetts Institute of Technology w USA w 1952 roku.

14 Do podstawowych produktów mechatronicznych można zaliczyć: drukarki laserowe lub atramentowe, kserokopiarki nowej generacji, sterowane cyfrowo maszyny do szycia maszyny dziewiarskie, elektronicznie sterowany silnik spalinowy, różne systemy (np. przeciwblokujące i przeciwpoślizgowe) w technice samochodowej, obrabiarki sterowane numerycznie, roboty i manipulatory
 w technice samochodowej, obrabiarki sterowane")
15 Produktami mechatronicznymi są: miniaturowe kamery video, odtwarzacze CD i wiele mikromaszyn, duże maszyny rolnicze i drogowe nowej generacji wielkogabarytowe systemy i linie produkcyjne.

16 Urządzenia mechatroniczne są zintegrowanymi zespołami elementów składowych i podzespołów spełniających różne funkcje, działających na różnych zasadach fizycznych i wykorzystujących różne zjawiska. Ich głównym zadaniem jest czynność mechaniczna, a istotą jest możliwość reagowania na bodźce zewnętrzne docierające do urządzenia poprzez system czujników.


17 multifunkcjonalnością, oznaczającą łatwość realizacji różnych zadań przez jedno urządzenie, np. przez zmianę oprogramowania, inteligencją, oznaczającą możliwością podejmowania decyzji i komunikacji z otoczeniem, elastycznością, czyli łatwością modyfikacji konstrukcji na etapie projektowania, produkcji,

18 możliwością niewidocznego dla operatora sposobu działania, co wymaga zastosowania interfejsu użytkownika dla komunikowania się z operatorem, zależnością od wymagań rynkowych i możliwości technologicznych wykonania. Najważniejszym jednak aspektem mechatroniki jest to, że maszyny i urządzenia mechatroniczne są wyrazem naśladownictwa przyrody.

19 Istotną cechą urządzeń mechatronicznych jest zdolność do wiernego przetwarzania i przekazywania informacji (w formie sygnałów mechanicznych, elektrycznych, pneumatycznych, optycznych i innych) przy jednoczesnym wysokim stopniu automatyzacji tych urządzeń.
 przy jednoczesnym wysokim stopniu")


20 Systemy mechatroniczne wyposażone są w czujniki zbierające sygnały ze swojego otoczenia, programowalne układy przetwarzania i interpretacji tych sygnałów oraz zespoły komunikacyjne i urządzenia wykonawcze oddziałujące odpowiednio na otoczenie.

ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
PROJEKTOWANIE MECHATRONICZNE
 Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Mechatronika i szybkie prototypowanie układów sterowania
 Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
PLAN STUDIÓW NIESTACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy
 ydział Mechaniczny 06.1-M-MiBM-N1-EP-000_13 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 441 60 rupa Treści Podstawowych 1. ykład monograficzny 36 2 18 1 18 1 2. Język obcy I* 36 4 18 2 18 2
ydział Mechaniczny 06.1-M-MiBM-N1-EP-000_13 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 441 60 rupa Treści Podstawowych 1. ykład monograficzny 36 2 18 1 18 1 2. Język obcy I* 36 4 18 2 18 2
Podstawy Mechatroniki Literatura
 Podstawy Mechatroniki Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki
Podstawy Mechatroniki Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki
HARMONOGRAM EGZAMINÓW
 Kierunek: MECHANIKA I BUDOWA MASZYN - studia I stopnia Materiałoznawstwo Analiza matematyczna Termodynamika techniczna 2 Cały rok Mechanika II Wytrzymałość materiałów Spawalnictwo Technologia spawania
Kierunek: MECHANIKA I BUDOWA MASZYN - studia I stopnia Materiałoznawstwo Analiza matematyczna Termodynamika techniczna 2 Cały rok Mechanika II Wytrzymałość materiałów Spawalnictwo Technologia spawania
PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia
semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia
Plan studiów na kierunku: MECHATRONIKA
 Plan studiów na kierunku: Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne ZAL
Plan studiów na kierunku: Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne ZAL
Plan studiów na kierunku: MECHATRONIKA
 Plan studiów na kierunku: MECHATRONIKA Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne
Plan studiów na kierunku: MECHATRONIKA Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne
Kierunki i specjalności studiów niestacjonarnych 2017/2018
 Kierunki i specjalności studiów niestacjonarnych 2017/2018 Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez specjalności Bez specjalności
Kierunki i specjalności studiów niestacjonarnych 2017/2018 Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez specjalności Bez specjalności
PLAN STUDIÓW STACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy
 S TP,2 P 06.-M-MiBM-S-EP-000_2 PD TK,0 I P Ć L P/S 735 59 rupa Treści Podstawowych S I. ychowanie fizyczne 60 2 30 30 S I 2. Język obcy I* 60 4 2 2 S I 3. Język obcy II** 60 4 30 2 30 2 S I 4. Informatyka
S TP,2 P 06.-M-MiBM-S-EP-000_2 PD TK,0 I P Ć L P/S 735 59 rupa Treści Podstawowych S I. ychowanie fizyczne 60 2 30 30 S I 2. Język obcy I* 60 4 2 2 S I 3. Język obcy II** 60 4 30 2 30 2 S I 4. Informatyka
PLAN STUDIÓW NIESTACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy
 S TP 1,2 P 06.1-M-MiBM-N1-EP-000_12 PD TK I P Ć L P/S 441 59 rupa Treści Podstawowych S I 1 1. ykład monograficzny 36 2 18 1 18 1 S I 1 2. Język obcy I* 36 4 2 2 18 18 S I 1 3. Język obcy II** 36 4 18
S TP 1,2 P 06.1-M-MiBM-N1-EP-000_12 PD TK I P Ć L P/S 441 59 rupa Treści Podstawowych S I 1 1. ykład monograficzny 36 2 18 1 18 1 S I 1 2. Język obcy I* 36 4 2 2 18 18 S I 1 3. Język obcy II** 36 4 18
PLAN STUDIÓW STACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy
 ydział Mechaniczny 06.-M-MiBM-S-EP-000_3,0 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 735 60 rupa Treści Podstawowych. ychowanie fizyczne 60 2 30 30 2. Język obcy I* 60 4 30 2 30 2 3. Język
ydział Mechaniczny 06.-M-MiBM-S-EP-000_3,0 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 735 60 rupa Treści Podstawowych. ychowanie fizyczne 60 2 30 30 2. Język obcy I* 60 4 30 2 30 2 3. Język
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne. laboratoryjne projektowe.
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 017/018 Język wykładowy: Polski Semestr 1 Fizyka
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 017/018 Język wykładowy: Polski Semestr 1 Fizyka
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia
Oferta edukacyjna Uniwersytetu Rzeszowskiego. www.mechatronika.univ.rzeszow.pl
 Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
PLAN STUDIÓW STACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy. I rok. Praktyka kierunkowa 6 Praktyka kierunkowa 6
 ODZ.DYDAKT. () PUNKTY 06.1-M-MiBM-S1-EP-000_09 Standard 1. ychowanie fizyczne 60 4 1 1. Język obcy I* 60 4 1 1 3. Język obcy II** 60 4 3 1 4. Informatyka 5 Bazy danych 1 1 6 Języki programowania 7 Matematyka
ODZ.DYDAKT. () PUNKTY 06.1-M-MiBM-S1-EP-000_09 Standard 1. ychowanie fizyczne 60 4 1 1. Język obcy I* 60 4 1 1 3. Język obcy II** 60 4 3 1 4. Informatyka 5 Bazy danych 1 1 6 Języki programowania 7 Matematyka
POLITECHNIKA POZNAŃSKA
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
MECHATRONIKA według. ch!
 MECHATRONIKA według ch! Niniejsze opracowanie zostało przygotowane na potrzeby projektu: "Strategia Wolnych i Otwartych Implementacji jako innowacyjny model zainteresowania kierunkami informatyczno-technicznymi
MECHATRONIKA według ch! Niniejsze opracowanie zostało przygotowane na potrzeby projektu: "Strategia Wolnych i Otwartych Implementacji jako innowacyjny model zainteresowania kierunkami informatyczno-technicznymi
Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Studia niestacjonarne inżynierskie
 Studia niestacjonarne inżynierskie") Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 1W Matematyka 1 4 72 36 36 0 0 0 18 18 6 18 18 6 2W Fizyka 1 3 36 18 18 0 0 0 18 18 6 3W
Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 1W Matematyka 1 4 72 36 36 0 0 0 18 18 6 18 18 6 2W Fizyka 1 3 36 18 18 0 0 0 18 18 6 3W
Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny mgr Ireneusz Podolski MECHATRONIKA
 Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny mgr Ireneusz Podolski MECHATRONIKA WPROWADZENIE Produkt mechatroniczny lub system mechatroniczny: Integracja komponentów mechanicznych,
Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny mgr Ireneusz Podolski MECHATRONIKA WPROWADZENIE Produkt mechatroniczny lub system mechatroniczny: Integracja komponentów mechanicznych,
Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Studia stacjonarne inżynierskie
 Studia stacjonarne inżynierskie") Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 W C L S P ECTS 1W Matematyka 1 4 120 60 60 0 0 0 30 30 6 30 30 6 2W Fizyka 1 3 90 30 30 30
Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 W C L S P ECTS 1W Matematyka 1 4 120 60 60 0 0 0 30 30 6 30 30 6 2W Fizyka 1 3 90 30 30 30
Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy: Polski Semestr 1 RME-1-103-s Podstawy
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy: Polski Semestr 1 RME-1-103-s Podstawy
pierwszy termin egzamin poprawkowy
 Kierunek: MECHATRONIKA - studia I stopnia Analiza matematyczna i równania różniczkowe Mechanika. 2 Podstawy konstrukcji maszyn Robotyka 3 SYSTEMY STEROWANIA Kinematyka i dynamika manipulatorów i robotów
Kierunek: MECHATRONIKA - studia I stopnia Analiza matematyczna i równania różniczkowe Mechanika. 2 Podstawy konstrukcji maszyn Robotyka 3 SYSTEMY STEROWANIA Kinematyka i dynamika manipulatorów i robotów
Mechatronika i inteligentne systemy produkcyjne. Paweł Pełczyński ppelczynski@swspiz.pl
 Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
HARMONOGRAM EGZAMINÓW - rok akademicki 2015/ semestr zimowy. Kierunek ENERGETYKA - studia inżynierskie środa
 Kierunek ENERGETYKA - studia inżynierskie 1 Analiza matematyczna Materiałoznawstwo 2 Termodynamika Wytrzymałość materiałów Gospodarka energetyczna Technologie energetyczne III Spalanie paliw stałych, ciekłych
Kierunek ENERGETYKA - studia inżynierskie 1 Analiza matematyczna Materiałoznawstwo 2 Termodynamika Wytrzymałość materiałów Gospodarka energetyczna Technologie energetyczne III Spalanie paliw stałych, ciekłych
PLAN STUDIÓW NIESTACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy. I rok. Sem. VI
 ODZ.DYDAKT. () PUNKTY 06.-M-MiBM-N-EP-000_09 PLAN STUDIÓ NIESTACJONARNYCH I-go stopnia Etap podstawowy Sem. I I rok Sem. II Sem. III Zatwierdzono Uchwałą Rady Instytutu Budowy i Eksploatacji Maszyn 06.05.009
ODZ.DYDAKT. () PUNKTY 06.-M-MiBM-N-EP-000_09 PLAN STUDIÓ NIESTACJONARNYCH I-go stopnia Etap podstawowy Sem. I I rok Sem. II Sem. III Zatwierdzono Uchwałą Rady Instytutu Budowy i Eksploatacji Maszyn 06.05.009
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechatronika studia I stopnia stacjonarne Rzeszów,12 Listopada 2014 1 Plan studiów z zaznaczeniem
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechatronika studia I stopnia stacjonarne Rzeszów,12 Listopada 2014 1 Plan studiów z zaznaczeniem
4. Sylwetka absolwenta
 1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
WYDZIAŁY, KIERUNKI, POZIOMY, TRYBY STUDIOWANIA ORAZ SPECJALNOŚCI OFEROWANE NA STUDIACH NIESTACJONARNYCH
 WYDZIAŁY, KIERUNKI, POZIOMY, TRYBY STUDIOWANIA ORAZ SPECJALNOŚCI OFEROWANE NA STUDIACH NIESTACJONARNYCH I. STUDIA PROWADZONE W WARSZAWIE Wydział ADMINISTRACJI I NAUK SPOŁECZNYCH Kierunek Administracja
WYDZIAŁY, KIERUNKI, POZIOMY, TRYBY STUDIOWANIA ORAZ SPECJALNOŚCI OFEROWANE NA STUDIACH NIESTACJONARNYCH I. STUDIA PROWADZONE W WARSZAWIE Wydział ADMINISTRACJI I NAUK SPOŁECZNYCH Kierunek Administracja
Mechatronika Uniwersytet Rzeszowski
 Mechatronika Uniwersytet Rzeszowski Plan studiów inżynierskich STUDIA INŻYNIERKSIE (7 semestrów) Studia stacjonarne i niestacjonarne Specjalności: Projektowanie systemów mechatronicznych Systemy wbudowane
Mechatronika Uniwersytet Rzeszowski Plan studiów inżynierskich STUDIA INŻYNIERKSIE (7 semestrów) Studia stacjonarne i niestacjonarne Specjalności: Projektowanie systemów mechatronicznych Systemy wbudowane
KIERUNKI I SPECJALNOŚCI
 KIERUNKI I SPECJALNOŚCI STUDIA NIESTACJONARNE PROWADZONE W WARSZAWIE Administacji i Nauk Społecznych Kierunek ADMINISTRCAJA Czas trwania 6 semestrów 4 semestry Specjalności Bez specjalności Bez specjalności
KIERUNKI I SPECJALNOŚCI STUDIA NIESTACJONARNE PROWADZONE W WARSZAWIE Administacji i Nauk Społecznych Kierunek ADMINISTRCAJA Czas trwania 6 semestrów 4 semestry Specjalności Bez specjalności Bez specjalności
Mechatronika. Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy:
 Technik Mechatronik Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu systemowym, które umożliwia
Technik Mechatronik Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu systemowym, które umożliwia
Technik Mechatronik. Kliknij, aby dodać tekst
 Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
SŁAWOMIR WIAK (redakcja)
") SŁAWOMIR WIAK (redakcja) Akademicka Oficyna Wydawnicza EXIT Recenzenci: Prof. Janusz Turowski Politechnika Łódzka Prof. Ewa Napieralska Juszczak University Lille Nord de France, LSEE, UA, Francja Autorzy
SŁAWOMIR WIAK (redakcja) Akademicka Oficyna Wydawnicza EXIT Recenzenci: Prof. Janusz Turowski Politechnika Łódzka Prof. Ewa Napieralska Juszczak University Lille Nord de France, LSEE, UA, Francja Autorzy
Tabela odniesień efektów kierunkowych do efektów obszarowych
 Umiejscowienie kierunku w obszarze kształcenia Kierunek studiów automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika
Umiejscowienie kierunku w obszarze kształcenia Kierunek studiów automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika
Tok Specjalność Semestr Z / L Blok Przedmiot
 ENERGETYKA S1 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 11 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 12 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 13 ENE_1A_S_2015_2016_21564_1 semestr
ENERGETYKA S1 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 11 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 12 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 13 ENE_1A_S_2015_2016_21564_1 semestr
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. laboratoryjne projektowe.
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 17/18 Język wykładowy: Polski Semestr 1 Fizyka RAR-1-1-s
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 17/18 Język wykładowy: Polski Semestr 1 Fizyka RAR-1-1-s
PLAN STUDÓW STACJONARNYCH II-GO STOPNIA dla kierunku Mechanika i Budowa Maszyn Etap podstawowy. Uniwersytet Zielonogórski Wydział Mechaniczny
 ydział Mechaniczny PLAN STUDÓ STACJONARNYCH II-GO STOPNIA Etap podstawowy Zatwierdzono Uchwałą Rady Instytutu BiEM z dnia 2.05.204 Zatwierdzono Uchwałą Rady ydziału Mechanicznego z dnia z dnia 2.05.204
ydział Mechaniczny PLAN STUDÓ STACJONARNYCH II-GO STOPNIA Etap podstawowy Zatwierdzono Uchwałą Rady Instytutu BiEM z dnia 2.05.204 Zatwierdzono Uchwałą Rady ydziału Mechanicznego z dnia z dnia 2.05.204
Kierunki i specjalności na stacjonarnych studiach I i II stopnia zatwierdzone do uruchomienia w roku akademickim 2015/16
 Kierunki i specjalności na stacjonarnych studiach I i II stopnia zatwierdzone do uruchomienia w roku akademickim 2015/16 Załącznik 1 Wydział Architektury architektura architektura architektura krajobrazu
Kierunki i specjalności na stacjonarnych studiach I i II stopnia zatwierdzone do uruchomienia w roku akademickim 2015/16 Załącznik 1 Wydział Architektury architektura architektura architektura krajobrazu
Energetyka S1. Pierwsza Druga semestru obieralny ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 06
 Energetyka S1 ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 06 Podstawy spawalnictwa 10 12 Technologie spajania 8 8 ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 09 Rurociągi przemysłowe 5 8 Sieci ciepłownicze
Energetyka S1 ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 06 Podstawy spawalnictwa 10 12 Technologie spajania 8 8 ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 09 Rurociągi przemysłowe 5 8 Sieci ciepłownicze
Plan studiów kierunku MECHANIKA I BUDOWA MASZYN
 bezpośrednim udziałem a zajęcia Rok studiów I akademickiego lub j osoby prowadzącej zajęcia Technologie informacyjne w inżynierii I 2 1,2 0,8 0,6 ZAL OC O 30 14 16 16 1 KBEPiM 2. Przedmioty humanistyczne
bezpośrednim udziałem a zajęcia Rok studiów I akademickiego lub j osoby prowadzącej zajęcia Technologie informacyjne w inżynierii I 2 1,2 0,8 0,6 ZAL OC O 30 14 16 16 1 KBEPiM 2. Przedmioty humanistyczne
Kierunki studiów prowadzone w Warszawie
 KIERUNKI I SPECJALNOŚCI STUDIÓW NIESTACJONARNYCH PIERWSZEGO I DRUGIEGO STOPNIA Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez
KIERUNKI I SPECJALNOŚCI STUDIÓW NIESTACJONARNYCH PIERWSZEGO I DRUGIEGO STOPNIA Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez
Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2016/17
 Załącznik 1 Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2016/17 Wydział Architektury architektura architektura architektura krajobrazu
Załącznik 1 Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2016/17 Wydział Architektury architektura architektura architektura krajobrazu
MECHATRONICZNA KONCEPCJA EDUKACJI ZAWODOWEJ. MECHATRONIKA: indywidualizacja procesu nauczania
 MECHATRONICZNA KONCEPCJA EDUKACJI ZAWODOWEJ MECHATRONIKA: indywidualizacja procesu nauczania Pierwotnie, mechatronika była rozumiana jako uzupełnienie elementów mechanicznych przez elektronikę w mechanice
MECHATRONICZNA KONCEPCJA EDUKACJI ZAWODOWEJ MECHATRONIKA: indywidualizacja procesu nauczania Pierwotnie, mechatronika była rozumiana jako uzupełnienie elementów mechanicznych przez elektronikę w mechanice
PLAN STUDÓW NIESTACJONARNYCH II-GO STOPNIA dla kierunku Mechanika i Budowa Maszyn Etap podstawowy. Uniwersytet Zielonogórski Wydział Mechaniczny
 Etap podstawowy Zatwierdzono Uchwałą Rady Instytutu BiEM z dnia 21.05.2014 Zatwierdzono Uchwałą Rady ydziału Mechanicznego z dnia z dnia 21.05.2014 06.1-M-MiBM-ND-EP-00_14 Grupa treści podstawowych 1 Mechanika
Etap podstawowy Zatwierdzono Uchwałą Rady Instytutu BiEM z dnia 21.05.2014 Zatwierdzono Uchwałą Rady ydziału Mechanicznego z dnia z dnia 21.05.2014 06.1-M-MiBM-ND-EP-00_14 Grupa treści podstawowych 1 Mechanika
Projektowanie Układów Mechatronicznych
 Projektowanie Układów Mechatronicznych Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne.
Projektowanie Układów Mechatronicznych Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne.
Rok I, semestr I (zimowy)
") Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2012/2013 Rok I,
Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2012/2013 Rok I,
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy: Polski Semestr 1 Fizyka
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy: Polski Semestr 1 Fizyka
SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE
 PROGRAM SEMINARIUM 19-20.04.2012 SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE 10.00 Powitanie uczestników i oficjalne otwarcie seminarium (AULA 02 COPENICANUM) Prof. dr hab. inż. Mariusz Kaczmarek UKW
PROGRAM SEMINARIUM 19-20.04.2012 SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE 10.00 Powitanie uczestników i oficjalne otwarcie seminarium (AULA 02 COPENICANUM) Prof. dr hab. inż. Mariusz Kaczmarek UKW
(przedmioty przeznaczone do realizacji są oznaczone kolorem żółtym)
") ENERGETYKA S1 ENE_1A_S_2018_2019_1 3 Zimowy Blok 06 Podstawy spawalnictwa 8 Technologie spajania 1 ENE_1A_S_2018_2019_1 3 Zimowy Blok 09 Rurociągi przemysłowe 0 Sieci ciepłownicze 9 ENE_1A_S_2018_2019_1
ENERGETYKA S1 ENE_1A_S_2018_2019_1 3 Zimowy Blok 06 Podstawy spawalnictwa 8 Technologie spajania 1 ENE_1A_S_2018_2019_1 3 Zimowy Blok 09 Rurociągi przemysłowe 0 Sieci ciepłownicze 9 ENE_1A_S_2018_2019_1
PLAN STUDÓW STACJONARNYCH II-GO STOPNIA dla kierunku Mechanika i Budowa Maszyn Etap podstawowy 18 RAZEM PUNKTY ECTS 90
 ODZ.DYDAKT. () odz. 06.1-M-MiBM-S2-EP-000_09 PLAN STUDÓ STACJONARNYCH II-O STOPNIA Etap podstawowy 1 Mechanika analityczna 45 3 6 1 E 1 1 6 rupa treści kierunkowych 2 spółczesne matetriały inżynierskie
ODZ.DYDAKT. () odz. 06.1-M-MiBM-S2-EP-000_09 PLAN STUDÓ STACJONARNYCH II-O STOPNIA Etap podstawowy 1 Mechanika analityczna 45 3 6 1 E 1 1 6 rupa treści kierunkowych 2 spółczesne matetriały inżynierskie
Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2017/18
 Załącznik nr 1 do uchwały nr 86/d/10/2017 z 25 października 2017 r. Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2017/18 Wydział Architektury
Załącznik nr 1 do uchwały nr 86/d/10/2017 z 25 października 2017 r. Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2017/18 Wydział Architektury
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechanika i budowa maszyn studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechanika i budowa maszyn studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów
PLAN STUDÓW NIESTACJONARNYCH II-GO STOPNIA dla kierunku Mechanika i Budowa Maszyn Etap podstawowy RAZEM PUNKTY ECTS 120
 odz. ( 8zj.x ) ODZ.DYDAKT. () 06.-M-MiBM-N-EP-000_09 PLAN STUDÓ NIESTACJONARNYCH II-O STOPNIA Etap podstawowy Ć L P/S Ć L P/S Ć L P/S Ć L P/S Mechanika analityczna 3 4 7 E 7 rupa treści kierunkowych spółczesne
odz. ( 8zj.x ) ODZ.DYDAKT. () 06.-M-MiBM-N-EP-000_09 PLAN STUDÓ NIESTACJONARNYCH II-O STOPNIA Etap podstawowy Ć L P/S Ć L P/S Ć L P/S Ć L P/S Mechanika analityczna 3 4 7 E 7 rupa treści kierunkowych spółczesne
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechanika i budowa maszyn studia I stopnia stacjonarne Rzeszów, 12.11.2014 Plan studiów z
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechanika i budowa maszyn studia I stopnia stacjonarne Rzeszów, 12.11.2014 Plan studiów z
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA
 PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
WEEIA Plan studiów stacjonarnych I stopnia (inŝynierskich)
") WEEIA Plan studiów stacjonarnych I stopnia (inŝynierskich) I II III IV V VI VII Przedmioty w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P Przedmioty ogólne Wstęp do
WEEIA Plan studiów stacjonarnych I stopnia (inŝynierskich) I II III IV V VI VII Przedmioty w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P Przedmioty ogólne Wstęp do
270 RAZEM PUNKTY ECTS 90
 Etap podstawowy Zatwierdzono Uchwałą Rady Instytutu BiEM z dnia 29.03.202 Zatwierdzono Uchwałą Rady ydziału Mechanicznego z dnia z dnia 29.03.202 06.-M-MiBM-S2-EP-000_2 rupa treści podstawowych Mechanika
Etap podstawowy Zatwierdzono Uchwałą Rady Instytutu BiEM z dnia 29.03.202 Zatwierdzono Uchwałą Rady ydziału Mechanicznego z dnia z dnia 29.03.202 06.-M-MiBM-S2-EP-000_2 rupa treści podstawowych Mechanika
Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Plan studiów niestacjonarnych I stopnia (inŝynierskich)
") Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Plan studiów niestacjonarnych I stopnia (inŝynierskich) I II III IV godzin w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r
Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Plan studiów niestacjonarnych I stopnia (inŝynierskich) I II III IV godzin w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r
Specjalność: Komputerowe systemy sterowania i diagnostyki. Strona 1 z 5
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Katedra Systemów Decyzyjnych. Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl
 Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Informacje o zawodach (szkoła młodzieżowa) I. Technikum zawodowe (4-letnie) 1) Technik mechanik
 I. Technikum zawodowe (4-letnie) 1) Technik mechanik") Informacje o zawodach (szkoła młodzieżowa) I. Technikum zawodowe (4-letnie) 1) Technik mechanik Organizuje i nadzoruje produkcję, montaż, naprawy i konserwacje wszelkich maszyn i urządzeo produkowanych
Informacje o zawodach (szkoła młodzieżowa) I. Technikum zawodowe (4-letnie) 1) Technik mechanik Organizuje i nadzoruje produkcję, montaż, naprawy i konserwacje wszelkich maszyn i urządzeo produkowanych
PLAN STUDIÓW STACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn
 ydział Mechaniczny PLAN STUDIÓ STACJONARNYCH I-go stopnia Zatwierdzono Uchwałą Rady Instytutu dnia 2.05.204 Zatwierdzono Uchwałą Rady ydziału Mechanicznego dnia 2.05.204 06.-M-MiBM-SP-204/205,0 Ć L P/S
ydział Mechaniczny PLAN STUDIÓ STACJONARNYCH I-go stopnia Zatwierdzono Uchwałą Rady Instytutu dnia 2.05.204 Zatwierdzono Uchwałą Rady ydziału Mechanicznego dnia 2.05.204 06.-M-MiBM-SP-204/205,0 Ć L P/S
nr projektu w Politechnice Śląskiej 11/030/FSD18/0222 KARTA PRZEDMIOTU
 Z1-PU7 WYDANIE N3 Strona: 1 z 5 (pieczęć jednostki organizacyjnej) KARTA PRZEDMIOTU 1) Nazwa przedmiotu: AUTOMATYZACJA I ROBOTYZACJA PROCESÓW 3) Karta przedmiotu ważna od roku akademickiego: 2018/2019
Z1-PU7 WYDANIE N3 Strona: 1 z 5 (pieczęć jednostki organizacyjnej) KARTA PRZEDMIOTU 1) Nazwa przedmiotu: AUTOMATYZACJA I ROBOTYZACJA PROCESÓW 3) Karta przedmiotu ważna od roku akademickiego: 2018/2019
PLAN STUDIÓW NIESTACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn
 ydział Mechaniczny PLAN STUDIÓ NIESTACJONARNYCH I-go stopnia Zatwierdzono Uchwałą Rady Instytutu dnia 21.05.2014 Zatwierdzono Uchwałą Rady ydziału Mechanicznego dnia 21.05.2014 06.1-M-MiBM-NP-2014/2015
ydział Mechaniczny PLAN STUDIÓ NIESTACJONARNYCH I-go stopnia Zatwierdzono Uchwałą Rady Instytutu dnia 21.05.2014 Zatwierdzono Uchwałą Rady ydziału Mechanicznego dnia 21.05.2014 06.1-M-MiBM-NP-2014/2015
Specjalności. Mechanika i budowa maszyn studia I stopnia
 Specjalności Mechanika i budowa maszyn studia I stopnia specjalność: Budowa i eksploatacja maszyn i urządzeń Absolwent tej specjalności posiada wiedzę i kwalifikacje umożliwiające podjęcie zatrudnienia
Specjalności Mechanika i budowa maszyn studia I stopnia specjalność: Budowa i eksploatacja maszyn i urządzeń Absolwent tej specjalności posiada wiedzę i kwalifikacje umożliwiające podjęcie zatrudnienia
Trochę o zawodach, w których kształcimy
 Trochę o zawodach, w których kształcimy TECHNIK ELEKTRYK Dział elektryczności jest bardzo szeroką i ciągle rozwijającą się dziedziną nauki, w której każdy może znaleźć obszar zgodny z własnym zainteresowaniem,
Trochę o zawodach, w których kształcimy TECHNIK ELEKTRYK Dział elektryczności jest bardzo szeroką i ciągle rozwijającą się dziedziną nauki, w której każdy może znaleźć obszar zgodny z własnym zainteresowaniem,
Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2017/18
 Załącznik nr 2 do uchwały nr 45/d/05/2016 Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2017/18 Wydział Architektury architektura architektura
Załącznik nr 2 do uchwały nr 45/d/05/2016 Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2017/18 Wydział Architektury architektura architektura
Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność:
 Załącznik 3 Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność: Lp. Nazwa przedmiotu Liczba godzin w semestrze Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 E Z Σh
Załącznik 3 Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność: Lp. Nazwa przedmiotu Liczba godzin w semestrze Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 E Z Σh
Mechatronika, co dalej?
 Mechatronika, co dalej? W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie innowacyjnej myśli i działań uczniów gimnazjów dla edukacji i budowy przyszłych kadr inżynieryjnotechnicznych
Mechatronika, co dalej? W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie innowacyjnej myśli i działań uczniów gimnazjów dla edukacji i budowy przyszłych kadr inżynieryjnotechnicznych
SZKOLNY ZESTAW PROGRAMÓW NAUCZANIA rok szkolny 2011/2012. Technikum nr 4
 SZKOLNY ZESTAW PROGRAMÓW NAUCZANIA rok szkolny 2011/2012 Technikum nr 4 Program przedmiotów ogólnokształcących dla zawodów: technik teleinformatyk, technik elektronik, technik mechatronik, technik pojazdów,
SZKOLNY ZESTAW PROGRAMÓW NAUCZANIA rok szkolny 2011/2012 Technikum nr 4 Program przedmiotów ogólnokształcących dla zawodów: technik teleinformatyk, technik elektronik, technik mechatronik, technik pojazdów,
semestr III Lp Przedmiot w ć l p s e ECTS Godziny
 Specjalność: IMMiS - Inżynieria Materiałów Metalowych i Spawalnictwo 1 Analytical mechanics 15 15 3 30 4 Termodynamika II 15 15 30 5 Technologia spawalnictwa 5 15 15 1 5 55 6 Przem. fazowe i podstawy obr.
Specjalność: IMMiS - Inżynieria Materiałów Metalowych i Spawalnictwo 1 Analytical mechanics 15 15 3 30 4 Termodynamika II 15 15 30 5 Technologia spawalnictwa 5 15 15 1 5 55 6 Przem. fazowe i podstawy obr.
WYDZIAŁ MECHANICZNY. Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2017/2018
 WYDZIAŁ MECHANICZNY automatyka i robotyka energetyka inżynieria materiałowa inżynieria produkcji nie przewiduje się przeprowadzania rozmowy kwalifikacyjnej mechanika i budowa maszyn mechatronika transport
WYDZIAŁ MECHANICZNY automatyka i robotyka energetyka inżynieria materiałowa inżynieria produkcji nie przewiduje się przeprowadzania rozmowy kwalifikacyjnej mechanika i budowa maszyn mechatronika transport
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2014/2015 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2014/2015 Język wykładowy:
Specjalność: Komputerowe systemy sterowania i diagnostyki
 Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Mechanika i budowa maszyn Studia niestacjonarne I-go stopnia RW. Rzeszów r.
 Rzeszów, 19.12.2012 r. Mechanika i budowa maszyn Studia niestacjonarne I-go stopnia RW. Rzeszów 11.04.2012 r. MC Przedmiot humanistyczny historia techniki Wprowadzenie do procesów produkcyjnych Semestr
Rzeszów, 19.12.2012 r. Mechanika i budowa maszyn Studia niestacjonarne I-go stopnia RW. Rzeszów 11.04.2012 r. MC Przedmiot humanistyczny historia techniki Wprowadzenie do procesów produkcyjnych Semestr
Uwagi wstępne, organizacja zajęć
 Jakub Wierciak Uwagi wstępne, Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozwój systemów technicznych (Gawrysiak 1997) Mechatronika
Jakub Wierciak Uwagi wstępne, Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozwój systemów technicznych (Gawrysiak 1997) Mechatronika
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2018/19
 Załącznik nr 2 do uchwały nr 42/d/05/2017 Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2018/19 Wydział Architektury architektura (architecture)
Załącznik nr 2 do uchwały nr 42/d/05/2017 Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2018/19 Wydział Architektury architektura (architecture)
PLAN STUDIÓW NIESTACJONARNYCH STOPNIA II. kierunek TRANSPORT - przedmioty wspólne (krk) w tym sem. I sem.ii sem. III
 w tym sem. I sem.ii sem. III") - przedmioty wspólne (krk) w tym sem. I sem.ii sem. III NMK2 1 Mechanika stosowana 1 27 9 18 1 E 2 5 2 Filozofia 2 18 18 2 2 3 Język obcy (nie język angielski) 3,4 36 36 2 2 2 2 4 Komunikacja społeczna
- przedmioty wspólne (krk) w tym sem. I sem.ii sem. III NMK2 1 Mechanika stosowana 1 27 9 18 1 E 2 5 2 Filozofia 2 18 18 2 2 3 Język obcy (nie język angielski) 3,4 36 36 2 2 2 2 4 Komunikacja społeczna
PLAN STUDIÓW NR. STUDIA PIERWSZEGO STOPNIA (3,5-letnie, inżynierskie) Systemy Automatyki i Elektroniki GODZINY
 Systemy Automatyki i Elektroniki GODZINY") godzin tygodniowo (semestr I -... po... tygodni) A. PRZEDMIOTY OGÓNE ychowanie fizyczne 2 2 30 30 2 Język obcy 3 6 20 20 30 30 30 30 3 Technologia informacyjna 2 30 5 5 5 5 4a Rozwój zrównoważony 4b Edukacja
godzin tygodniowo (semestr I -... po... tygodni) A. PRZEDMIOTY OGÓNE ychowanie fizyczne 2 2 30 30 2 Język obcy 3 6 20 20 30 30 30 30 3 Technologia informacyjna 2 30 5 5 5 5 4a Rozwój zrównoważony 4b Edukacja
Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2018/19
 Załącznik nr 1 do uchwały nr 88/d/10/2017 z 25 października 2017 r. Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2018/19 Wydział Architektury
Załącznik nr 1 do uchwały nr 88/d/10/2017 z 25 października 2017 r. Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2018/19 Wydział Architektury
OPERATOR OBRABIAREK SKRAWAJĄCYCH
 OPERATOR OBRABIAREK SKRAWAJĄCYCH Operator obrabiarek skrawających jest to zawód występujący także pod nazwą tokarz, frezer, szlifierz. Osoba o takich kwalifikacjach potrafi wykonywać detale z różnych materiałów
OPERATOR OBRABIAREK SKRAWAJĄCYCH Operator obrabiarek skrawających jest to zawód występujący także pod nazwą tokarz, frezer, szlifierz. Osoba o takich kwalifikacjach potrafi wykonywać detale z różnych materiałów
144 RAZEM PUNKTY ECTS 90
 ydział Mechaniczny PLAN STUDÓ NIESTACJONARNYCH II-O STOPNIA Etap podstawowy Zatwierdzono Uchwałą Rady Instytutu BiEM z dnia 08.05.2013 Zatwierdzono Uchwałą Rady ydziału Mechanicznego z dnia z dnia 08.05.2013
ydział Mechaniczny PLAN STUDÓ NIESTACJONARNYCH II-O STOPNIA Etap podstawowy Zatwierdzono Uchwałą Rady Instytutu BiEM z dnia 08.05.2013 Zatwierdzono Uchwałą Rady ydziału Mechanicznego z dnia z dnia 08.05.2013
15 tyg. 15 tyg. w tym laborat. ECTS. laborat. semin. semin. ćwicz. ćwicz. wykł. ECTS. w tym laborat. 15 tyg. ECTS. laborat. semin. semin. ćwicz.
 Lp. Nazwa modułu Kod modułu E/Z I Treści podstawowe P 01 Matematyka 1 01 101P01 E 60 30 30 0 0 6 30 30 6 02 Matematyka 2 01 201P02 E 60 30 30 0 0 6 30 30 6 03 Fizyka z elementami biofizyki 02 102P03 E
Lp. Nazwa modułu Kod modułu E/Z I Treści podstawowe P 01 Matematyka 1 01 101P01 E 60 30 30 0 0 6 30 30 6 02 Matematyka 2 01 201P02 E 60 30 30 0 0 6 30 30 6 03 Fizyka z elementami biofizyki 02 102P03 E
pierwszy termin egzamin poprawkowy
 Kierunek: MECHATRONIKA - studia I stopnia 4.06. 5.09 Analiza matematyczna i równania różniczkowe Mechanika Podstawy konstrukcji maszyn Robotyka Język obcy SYSTEMY STEROWANIA Układy sterowania 3 Systemy
Kierunek: MECHATRONIKA - studia I stopnia 4.06. 5.09 Analiza matematyczna i równania różniczkowe Mechanika Podstawy konstrukcji maszyn Robotyka Język obcy SYSTEMY STEROWANIA Układy sterowania 3 Systemy
Wyniki wyborów przedmiotów obieralnych na rok akademicki 2016/2017
 Wyniki wyborów przedmiotów obieralnych na rok akademicki Tok studiów Semestr Specjalność Typ semestru Rok akademicki Blok Przedmiot Energetyka - studia stacjonarne pierwszego stopnia ENE_1A_S_2014_2015_9763_1
Wyniki wyborów przedmiotów obieralnych na rok akademicki Tok studiów Semestr Specjalność Typ semestru Rok akademicki Blok Przedmiot Energetyka - studia stacjonarne pierwszego stopnia ENE_1A_S_2014_2015_9763_1
Rok I, semestr I (zimowy)
") Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2014/2015 Rok I,
Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2014/2015 Rok I,
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
Mariusz Nowak Instytut Informatyki Politechnika Poznańska
 Inteligentne budynki (2) Źródła Loe E. C., Cost of Intelligent Buildings, Intelligent Buildings Conference, Watford, U. K., 1994 Nowak M., Zintegrowane systemy zarządzania inteligentnym budynkiem, Efektywność
Inteligentne budynki (2) Źródła Loe E. C., Cost of Intelligent Buildings, Intelligent Buildings Conference, Watford, U. K., 1994 Nowak M., Zintegrowane systemy zarządzania inteligentnym budynkiem, Efektywność
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy:
PROGRAM KSZTAŁCENIA NA KIERUNKU STUDIÓW WYŻSZYCH
 załącznik nr do Zarządzenia Rektora PG nr 0 z 8.07. 05 r. PROGRAM KSZTAŁCENIA NA KIERUNKU STUDIÓW WYŻSZYCH ZMIENIONY PROGRAM OBOWIĄZUJE OD ROKU AKADEMICKIEGO 05/06 I. OGÓLNA CHARAKTERYSTYKA PROWADZONYCH
załącznik nr do Zarządzenia Rektora PG nr 0 z 8.07. 05 r. PROGRAM KSZTAŁCENIA NA KIERUNKU STUDIÓW WYŻSZYCH ZMIENIONY PROGRAM OBOWIĄZUJE OD ROKU AKADEMICKIEGO 05/06 I. OGÓLNA CHARAKTERYSTYKA PROWADZONYCH
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: CYFROWE UKŁADY STEROWANIA DIGITAL CONTROL SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na kierunku Mechatronika Rodzaj zajęć: wykład, laboratorium Forma studiów: stacjonarne
Nazwa przedmiotu: CYFROWE UKŁADY STEROWANIA DIGITAL CONTROL SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na kierunku Mechatronika Rodzaj zajęć: wykład, laboratorium Forma studiów: stacjonarne
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces.
 AKADEMIA HUMANISTYCZNO-EKONOMICZNA W ŁODZI otwiera NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces. Zachęcamy do studiowania na 3.5 - letnich inżynierskich studiach stacjonarnych
AKADEMIA HUMANISTYCZNO-EKONOMICZNA W ŁODZI otwiera NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces. Zachęcamy do studiowania na 3.5 - letnich inżynierskich studiach stacjonarnych
Uchwała obowiązuje od dnia podjęcia przez Senat. Traci moc Uchwała nr 144/06/2013 Senatu Uniwersytetu Rzeszowskiego z 27 czerwca 2013 r.
 Rektor Uniwersytetu Rzeszowskiego al. Rejtana 16c; 35-959 Rzeszów tel.: + 48 17 872 10 00 (centrala) + 48 17 872 10 10 fax: + 48 17 872 12 65 e-mail: rektorur@ur.edu.pl Uchwała nr 282/03/2014 Senatu Uniwersytetu
Rektor Uniwersytetu Rzeszowskiego al. Rejtana 16c; 35-959 Rzeszów tel.: + 48 17 872 10 00 (centrala) + 48 17 872 10 10 fax: + 48 17 872 12 65 e-mail: rektorur@ur.edu.pl Uchwała nr 282/03/2014 Senatu Uniwersytetu
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka