Mitsubishi Electric. Profil Korporacji. Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA ///
|
|
|
- Ludwik Filip Smoliński
- 8 lat temu
- Przeglądów:
Transkrypt

1 Mitsubishi Electric Profil Korporacji


2 Mitsubishi na świecie Mitsubishi to jedna z największych globalnych korporacji zrzeszająca ponad 200 firm członkowskich Obszar działania to min. bankowość, handel, przemysł Roczny obrót na poziomie 250 miliardów

3 Mitsubishi na świece

4 Mitsubishi Electric global.mitsubishielectric.com Wiodący na świecie producent z branży elektroniki oraz energetyki Rok powstania 1921 Obecna w 120 krajach 100,000 pracowników 25 miliardów obrotu

5 Produkty przyjazne środowisku Program rozwoju produktów przyjaznych środowisku Program zarządzania odpadami zgodny z europejską normą (IPPC) Produkcja zgodna z ISO Wprowadzenie dyrektyw WEEE
 Produkcja zgodna z ISO 14000 Wprowadzenie")

6 Mitsubishi Electric w Europie europe.mitsubishielectric.com Ponad 25 lat obecności na rynku europejskim 7 oddziałów, dystrybutorzy oraz biura lokalne 1,500 pracowników 1.6 miliarda obrotu

7 Factory Automation Wsparcie lokalne Sieć 50 partnerów mitsubishi Więcej informacji na CZ.com.HU.PL.RU TR.com.co.UK

8 Od ręki, kiedy tylko potrzebujesz 4 główne regionalne centra dystrybucji Ponad 50 magazynów lokalnych Zarządzanie stanami magazynowymi w systemie SAP Szybki dostęp do informacji Regional Distribution Centres Partners

9 Zawsze aktualne informacje na stronie Nowości Informacje o produktach Katalogi, podręczniki itp Dodatkowo dla użytkowników MyMitsubishi: Pliki CAD, EPlan, GSD, EDS Certyfikaty Podręczniki szybkiego uruchomienia Narzędzia newsletter... Oraz wiele innych

10 Oferta produktów FA Oprogramowanie HMI PLC Falowniki Sterowniki ruchu Serwonapędy Aparatura łączeniowa NN Roboty CNC EDM Maszyny do cięcia laserem

11 Udział w globalnym rynku PLC Sprzedanych jednostek Others 36.4% Omron 11.6% 15.9% 6.6% Siemens 29.5% Rockwell Mitsubishi Source: ARC 2004

12 Udział w globalnym rynku Japonia Chiny Korea Taiwan Globalnie PLC 56%(1 st ) 26%(1 st ) 44%(1 st ) 36%(1 st ) 17% Others 18% Mitsubishi D 7% 56% G 19% Mitsubishi 49% HMI 37%(2 nd ) 23%(2 nd ) 29%(2 nd ) 22%(2 nd Others ) 11% T 7% Mitsubishi 37% G 7% 10% Total 204 O 39% Tot al 78 2 INV 40%(1 st ) 16%(2 nd ) 13%(2 nd ) 10%(2 nd Others ) 11% B 3% A 6% 8% D 20% Total 386 E 23% Mitsubishi 40% SV 32%(1 nd ) 22%(2 nd ) 23%(1 st ) 34%(1 st ) 12% M 11% C 16% Others 9% Mitsubishi 32% Tot al 766 E 32%
 22%(2 nd ) 23%(1 st ) 34%(1 st ) 12% M 11% C 16% Others 9% Mitsubishi 32% Tot al 766")
13 Mitsubishi Motors MAN Honda Saab KUKA NedCar Delphi Toyota Chevrolet Hyundai Hella Siemens VDO Volvo Nissan Referencje z branży motoryzacyjnej All brand names and trademarks are the property of the respective companies

14 Roboty przemysłowe MELFA Wyjątkowe wykonanie i osiągi

15 Co możemy zaoferować? Szeroki wybór robotów 6-osiowych, SCARA oraz robotów precyzyjnych w zakresie od 1kg-20kg Różnorodne pakiety oprogramowania do programowania i symulacji robotów Dostawa robotów z magazynu lokalnego i głównego w ciągu 14 dni Serwis i wsparcie techniczne Seminaria i szkolenia

![Roboty Mitsubishi 1 General-purpose compact, vertical robots [RV-S series] (1 to 18 kgf) 4 Micro working robots [RP series] RV-2AJ (5 axes) Loading capacity: 2 kg Maximum reach (radius): 410 mm](/docs-images/26/9299759/images/16-0.png "RV-3SJ (5 axes) Loading capacity: 3 kg Maximum reach (radius): 641 mm RV-1A (6 axes) Loading capacity: 1.")
16 Roboty Mitsubishi 1 General-purpose compact, vertical robots [RV-S series] (1 to 18 kgf) 4 Micro working robots [RP series] RV-2AJ (5 axes) Loading capacity: 2 kg Maximum reach (radius): 410 mm RV-3SJ (5 axes) Loading capacity: 3 kg Maximum reach (radius): 641 mm RV-1A (6 axes) Loading capacity: 1.5 kg Maximum reach (radius): 418 mm RV-3S (6 axes) Loading capacity: 3 kg Maximum reach (radius): 642 mm RV-6S (6 axes) Loading capacity: 6 kg Maximum reach (radius): 695 mm RV-6SL (6 axes) Loading capacity: 6 kg Maximum reach (radius): 901 mm RV-12S (6 axes) Loading capacity: 12 kg Maximum reach (radius): 1086 mm RV-12SL (6 axes) Loading capacity: 12 kg Maximum reach (radius): 1385 mm RP-1AH Loading capacity: 1 kg Work area: 150 x 105 (approx. A6 size) (Size of inscribed square) Positioning repeatability = mm (in X and Y directions) RP-3AH Loading capacity: 3 kg Work area: 210 x 150 (approx. A5 size) (Size of inscribed square) Positioning repeatability = mm (in X and Y directions) RP-1AH Loading capacity: 5 kg Work area: 300 x 210 (approx. A4 size) (Size of inscribed square) Positioning repeatability = 0.01 mm (in X and Y directions) 2 General-purpose compact, horizontal robots [RH-SH series] (6 to 18 kgf) 5 Palletizing robots RH-6SH35 RH-6SH45 Loading capacity: 6 kg Loading capacity: 6 kg Maximum reach (radius): 350 Maximum reach (radius): 450 mm mm Vertical stroke: 200 mm Vertical stroke: 200 mm (Special clean/mist (Special clean/mist specification) specification) RH-6SH55 Loading capacity: 6 kg Maximum reach (radius): 550 mm Vertical stroke: 200 mm (Special clean/mist specification) RH-12SH55 Loading capacity: 12 kg Maximum reach (radius): 550 mm Vertical stroke: 350 mm (Special clean/mist specification) RH-12SH70 Loading capacity: 12 kg Maximum reach (radius): 700 mm Vertical stroke: 350 mm (Special clean/mist specification) RH-12SH85 Loading capacity: 12 kg Maximum reach (radius): 850 mm Vertical stroke: 350 mm (Special clean/mist specification) RH-18SH85 Loading capacity: 18 kg Maximum reach (radius): 850 mm Vertical stroke: 350 mm (Special clean/mist specification) RV-100TH/150TH Loading capacity: 100 kg/150 kg Maximum reach (radius): 2360 mm Vertical stroke: 1900 mm RV-100THL/150THL Loading capacity: 100 kg/150 kg Maximum reach (radius): 2730 mm Vertical stroke: 2150 mm 3 General-purpose clean robots [clean specifications of 1and 2] 6 Dedicated clean robots [for transfer of large LCDs] RV-1AC-SB Loading capacity: 1.5 kg Maximum reach (radius): 418 mm Cleanliness class 100 (0.3μm) RV-2AJC-SB Loading capacity: 2 kg Maximum reach (radius): 410 mm Cleanliness class 100 (0.3μm) RV-3SC/3SJC Loading capacity: 3 kg/3 kg Maximum reach (radius): 641 mm/642 mm Cleanliness class 10 (0.3μm) RV-6SC Loading capacity: 6 kg Maximum reach (radius): 695 mm Cleanliness class 10 (0.3μm) RV-6SLC Loading capacity: 6 kg Maximum reach (radius): 901 mm Cleanliness class 10 (0.3μm) RV-12SC Loading capacity: 12 kg Maximum reach (radius): 1086 mm Cleanliness class 10 (0.3μm) RV-12SLC Loading capacity: 12 kg Maximum reach (radius): 1385 mm Cleanliness class 10 (0.3μm) RH-1000GJDC-SA Loading capacity: 15 kg Longitudinal pullout stroke: 1,720 mm Cleanliness class 10 (0.3μm) RH-1000GJLC Loading capacity: 15 kg Longitudinal pullout stroke: 1,752 mm Cleanliness class 10 (0.3μm) RC-1000GHWLC-SA Loading capacity: 15 kg Longitudinal pullout stroke: 1,600 mm Cleanliness class 10 (0.3μm) RH-1500GC-SA Loading capacity: 40 kg Longitudinal pullout stroke: 2,200 mm Cleanliness class 10 (0.3μm) RC-1300GC/1300GW Loading capacity: 20 kg/20 kg Longitudinal pullout stroke: 2,850 mm Cleanliness class 10 (0.3μm)
: 901 mm RV-12S (6 axes) Loading capacity: 12 kg Maximum reach (radius): 1086 mm RV-12SL (6 axes) Loading capacity: 12 kg Maximum reach (radius): 1385 mm RP-1AH")

17 Nazewnictwo Konfiguracja Obciążenie Seria Liczba osi R - V - Wertykalny H - SCARA P - Równoległy 1-1 kg 2-2 kg 3-3 kg 5 5 kg 6-6 kg 12-12kg 18-18kg 20-20kg A S SD SQ H 4 osie J 5 osi L M C


18 Zakres oferty Seria RV Wielofunkcyjne roboty wertykalne Seria RH Roboty typu SCARA Seria RP Wysoka precyzja, wyjątkowa prędkość

 504mm +/-0,02mm RV-3SD 6 3kg (3,5kg) 642mm +/-0,02mm RV-3SDJ 5 3kg (3,5kg)")
 1086mm +/-0,05mm RV-12SDL 6 12kg (10kg) 1385mm")
19 Roboty serii RV Model Liczba osi Obciążenie Zasięg Powtarzalność RV-2SDB 6 2kg (3kg) 504mm +/-0,02mm RV-3SD 6 3kg (3,5kg) 642mm +/-0,02mm RV-3SDJ 5 3kg (3,5kg) 641mm +/-0,02mm RV-6SD 6 6kg (5kg) 695mm +/-0,02mm RV-6SDL 6 6kg (5kg) 902mm +/-0,02mm RV-12SD 6 12kg (10kg) 1086mm +/-0,05mm RV-12SDL 6 12kg (10kg) 1385mm +/-0,05mm
 1086mm +/-0,05mm RV-12SDL 6 12kg (10kg) 1385mm")
20 RV-2SDB / RV-2SD Ramię robota: Zasięg Powtarzalność Maksymalny udźwig Maksymalna prędkość 504mm ±0.02mm 2 (3)kg 4.400mm/s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Liczba wejść/wyjść 256/256 Zasilanie AC180V-253V

21 RV-3SDB Ramię robota: Zasięg Powtarzalność Max. udźwig Max. prędkość 642mm ±0.02mm 3kg 5.500mm/s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Liczba wejść/wyjść 256E/256A Zasilanie AC180V-253V
22 RV-3SDJB Ramię robota: Zasięg Powtarzalność Max. udźwig Max. prędkość 641mm ±0.02mm 3kg 5.300mm/s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
23 RV-6SD Ramię robota: Zasięg Powtarzalność Max. udźwig Max. prędkość 696mm ±0.02mm 6kg 9.300mm/s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
24 RV-6SDL Ramię robota: Zasięg Powtarzalność Max. udźwig Max. prędkość 902mm ±0.02mm 6kg 8.500mm/s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
25 RV-12SD Ramię robota: Zasięg Powtarzalność Max. udźwig Max. prędkość 1086mm ±0.05mm 12kg 9.500mm/s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
26 RV-12SDL Ramię robota: Zasięg Powtarzalność Max. udźwig Max. prędkość 1385mm ±0.05mm 12kg 8.500mm/s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
27 RV-18SD Ramię robota: Zasięg Powtarzalność Max. udźwig Max. prędkość 1086mm ±0.05mm 18kg 7.500mm/s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
28 Film


29 Roboty serii RH RH-6SQH/6SDH RH-12SQH/12SDH RH-20SQH/20SDH
30 RH-6SDH35/45/55 Ramię robota: Zasięg Powtarzalność Max. udźwig Czas cyklu 350/450/550mm ±0.02mm 6kg 0,47 s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
31 RH-12SDH55/70/85 Ramię robota: Zasięg Powtarzalność Max. udźwig Czas cyklu: mm 550/700/850mm ±0.03mm 12kg 0,47 s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
32 RH-20SDH85/100 Ramię robota: Zasięg Powtarzalność Max. udźwig Czas cyklu: mm 850/1000mm ±0.03mm 20kg 0,47 s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
33 RH-3SDHR Ramię robota: Zasięg Powtarzalność Max. udźwig Czas cyklu 350mm ±0.01mm 3kg 0,32 s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256E/256A Zasilanie AC180V-253V
34 Film
35 Roboty serii RP Model Liczba osi Obciążenie Zasięg Powtarzalność RP-1AH 4 1kg 150x105mm +/-0,005mm RP-3AH 4 3kg 210x148mm +/-0,008mm RP-5AH 4 5kg 297x210mm +/-0,01mm
36 RP-1AH Ramię robota: Zasięg 332mm Zakres palety DIN A6 Powtarzalność ±0.005mm Max. udźwig 1 kg Czas cyklu: s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
37 RP-3AH Ramię robota: Zasięg 332mm Zakres palety DIN A5 Powtarzalność ±0.008mm Max. udźwig 3 kg Czas cyklu s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
38 RP-5AH Ramię robota: Zasięg 451mm Zakres palety DIN A4 Powtarzalność ±0.01mm Max. udźwig 5 kg Czas aplikacji s Kontroler: Max. liczba zadań 32 Max. liczba kroków Max. liczba pozycji Liczba programów 256 Max. liczba wejść/wyjść 256/256 Zasilanie AC180V-253V
39 Film
40 Kontrolery
41 PO W ER PULL RUN ERR RS-232 CN1 CN2 Q 172DRCPU STO P EM I RUN SW DISPLAY I/F TU I/F Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Od S-series do SQ/SD-series RV-S series RV-SQ Kontroler serii CRnQ-700 QnU PLC M E LS E C Q 6xP Q 01C PU Q 41X PU LL M IT S U B IS H I RV-SD Kontroler serii CRnD-700 Kontroler serii CRn-500
42 Mocne strony Kontrola dodatkowych osi serwo: Wszystkie nowe kontrolery wyposażone są w złącze optyczne do komunikowania się z napędami MR- J3 Mitsubishi. Umożliwia to podpięcie do 8 dodatkowych osi, w tym 2 mogą być interpolowane z ramieniem robota. MR-J3S-**B 1 2 SSCNET III Cabel 8 Przykład: Robot zainstalowany na stole XY
43 Mocne strony Łatwe połączeni z kamerą Prawie każdy system wizyjny system do śledzenia, kontroli jakości, pozycjonowania może być podłączony przez port Ethernet, USB, lub RS-232. Przygotowane specjalne funkcję pozwalają na zredukować czas i koszty kablowania i programowania. Nawet do 3 robotów można podłączyć do 1 systemu COGNEX lub nawet do 7 systemów wizyjnych COGNEX do jednego kontrolera robota.


44 Mocne strony Śledzenie transporterów Encoder Zintegrowane szybkie wejście enkoderowe umożliwia podłączenie 2 enkoderów. Zastosowanie eknoderów pozwala śledzić transportery o różnych prędkościach i kierunkach. Pobieranie lub operacje na produktach w ruchu skracają czas produkcji. Przykład: Przekładanie, manipulowanie, sortowanie
45 Interfejsy w kontrolerze SD Zintegrowane - 32 wejścia i 32 wyjścia - Zdalne I/O-Interface do 224 I/O - ETHERNET TCP/IP 10BASE-T / 100BASE-T (Master i Slave) - USB RS232-2 x wejście enkoderowe - Interfejs dodatkowych osi do 8 napędów - Wejście barier / osłon (redundantne) - Wejście Emergency Off-Inputs (redundante)
46 R32TB Bardzo ergonomiczna obudowa Odporność na warunki zewnętrzne (kasa IP65)
47 Widok programatora Włącznik ON/OFF Wyłącznik bezpieczeństwa Rękojeść Przyciski Deadman Przyciski funkcyjne Przyciski ruchów Przycisk Deadman Przyciski nawigacyjne
48 Oprogramowanie
49 Robot Software RT Toolbox2 Standard Podstawowe narzędzie do tworzenia programów RT Toolbox2 MELFA WORKS MELFA VISION Podstawowe narzędzie do tworzenia programów rozszerzone o symulator Narzędzie 3D-CAD pozwalające na tworzenie ścieżek ruchu robota Oprogramowanie pozwalające w prosty sposób na konfiguracje systemu wizyjnego firmy COGNEX
50 RT ToolBox 2
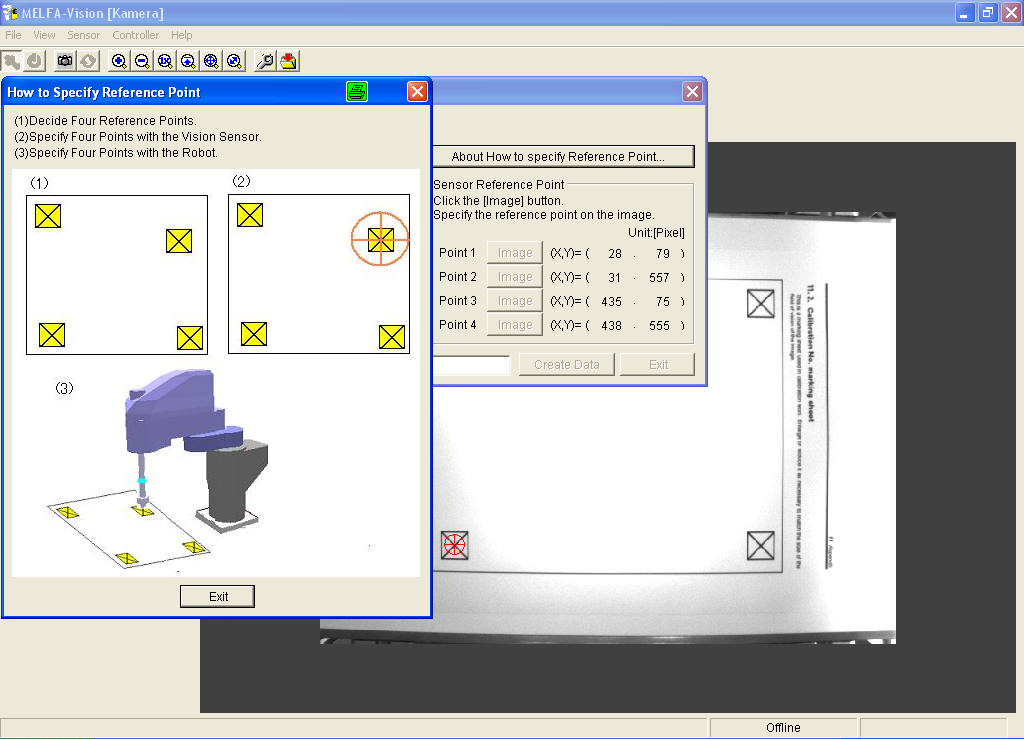
51 MelfaVision

52 symulacja Wierna symulacja działania robota, łącznie z sygnałami wejść/wyjść. Możliwość zapisu przebiegu symulacji w postaci pliku AVI Melfa Works funkcja jog Możliwość sterowania robotem w trybie jog identycznie jak w przypadku panelu uczącego Wykrywanie zakłóceń Oprogramowanie daje możliwość wykrywania zakłóceń pomiędzy robotem i otaczającymi go urządzeniami. Wystarczy wybrać urządzenie docelowe by wyświetlić informacje o potencjalnych zagrożeniach. Pomiar czasu cyklu pracy
53 Kontroler robota zaimplementowany w Full integration of controller and data communications functions on a single, scalable hardware platform!


54 Kontroler robota na


55 for MONITOR Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// iq- System kontrolerów robotów Robot CPU MELSEC Q61P-A1 Q01CPU POWER RUN ERR. Q173CPU MODE RUN ERR. USER BAT. BOOT Q173CPU QJ71E QJ61BT11 RUN ERR. RUN INIT. COM.ERR MST MODE OPEN. SD RUN SD 100M ERR. ERR. RD USER BAT. STATION BOOT NO 10 L RUN S MST RD L ERR. QGOT-1000 RUN CF CARD CH2 SD/ RD MODE ERR. USER FRONT SSCNET FRONT SSCNET 1 CN2 CN2 MODE PULL PULL CN1 PULL CN1 PULL MITSUBISHI RS-232 USB RS-232 USB RS BASE-T/100BASE-TX QJ71E RV-xSQ DU2 DU3
56 Ciągła i nieprzerwana wymiana danych Konkurencja: Wymiana danych poprzez sieć: Dodatkowe programowanie Standardowe osiągi Źródło błędów iq Wewnętrzna wymiana danych: Bardzo duża szybkość Konfiguracja zamiast programowania Minimalizacja błędów


57 Zintegrowany system iq Q172DNCPU Q172DNCPU Q172DNCPU-S2 DB HMI MES CNC PLC Robot Motion Ethernet
58 Motoryzacja BMW AUDI VW Mercedes HELLA Continental DELPHI VALEO EATON SANDEN Medycyna Johnson + Johnson Brown -Aesculap Chifa Kto już kupił / używa naszych robotów? NAGOYA WORKS HIMEJI WORKS KANI WORKS Szkło PHILIPS HOYA lens FUJI CANON OLYMPUS Zymark Elektyczny Panasonic General Electric PHILIPS LEGRAND Chemia BASF Bayer HENKEL Produkty użytku domowego GARDENA Hansgrohe Harro Höfliger GEBERIT IKEA : Edukacja : FESTO Didactic SMC Polskie Uczenie Wyższe
59 Dlaczego rynek robotów wciąż rośnie? Koszt zatrudnienia człowiek co rok wzrasta Wzrost kosztów produkcji. Możliwości robotów są coraz większe Więcej miejsc w których można je użyć. Koszt instalacji robota jest zbliżony do kosztu człowieka Zwykle nie przekracza ( 1.63 /h). Względy jakości i bezpieczeństwa robot zapewnia powtarzalność i jest odporny na szkodliwe otocznie Elastyczność systemu jest znacznie wyższa niż przy użyciu standardowych manipulatorów. Łatwo można przeprogramować aplikację
60 Filmy różne
61 Dziękuję za uwagę i zapraszam do współpracy EXPOTENCJALNE MOŻLIWOŚCI
Mitsubishi Electric. Profil Korporacji. Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA /// Robot /// MELFA ///
 Mitsubishi Electric Profil Korporacji Mitsubishi na świecie www.mitsubishi.com Mitsubishi to jedna z największych globalnych korporacji zrzeszająca ponad 200 firm członkowskich Obszar działania to min.
Mitsubishi Electric Profil Korporacji Mitsubishi na świecie www.mitsubishi.com Mitsubishi to jedna z największych globalnych korporacji zrzeszająca ponad 200 firm członkowskich Obszar działania to min.
Roboty MELFA. Zrobotyzowane linie produkcyjne według Mitsubishi Electric. Piotr Golis Inżynier Wsparcia Technicznego
 Roboty MELFA Zrobotyzowane linie produkcyjne według Mitsubishi Electric Piotr Golis Inżynier Wsparcia Technicznego 1 Plan prezentacji Trendy w automatyzacji - Cele zrobotyzowane Najnowsze rozwiązania Mitsubishi
Roboty MELFA Zrobotyzowane linie produkcyjne według Mitsubishi Electric Piotr Golis Inżynier Wsparcia Technicznego 1 Plan prezentacji Trendy w automatyzacji - Cele zrobotyzowane Najnowsze rozwiązania Mitsubishi
Szybcy i dokładni - czyli roboty Mitsubishi w świecie Life Science. Roman Janik. 18.09.2013 Rzeszów
 Szybcy i dokładni - czyli roboty Mitsubishi w świecie Life Science Roman Janik Mitsubishi Lancer EVOlution PLAN: 1. Roboty- precyzyjne, szybkie i elastyczne 2. Przykłady rozwiązań 3. Kim jesteśmy Roboty:
Szybcy i dokładni - czyli roboty Mitsubishi w świecie Life Science Roman Janik Mitsubishi Lancer EVOlution PLAN: 1. Roboty- precyzyjne, szybkie i elastyczne 2. Przykłady rozwiązań 3. Kim jesteśmy Roboty:
Mitsubishi Electric. Zatrudnimy robota produkcyjnego! Doskonalenie produkcji w przemyśle motoryzacyjnym jako efektywne zarządzanie czasem i kosztem
 Mitsubishi Electric Zatrudnimy robota produkcyjnego! Doskonalenie produkcji w przemyśle motoryzacyjnym jako efektywne zarządzanie czasem i kosztem Szymon Szkultin, Industrial Solutions Department Fakty
Mitsubishi Electric Zatrudnimy robota produkcyjnego! Doskonalenie produkcji w przemyśle motoryzacyjnym jako efektywne zarządzanie czasem i kosztem Szymon Szkultin, Industrial Solutions Department Fakty
Laboratorium Napędu Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu
 Jakub Stec Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu Kraków Globalny lider w technologiach zasilania i automatyki ABB Prezentacja firmy 145,000 pracowników w 100 krajach Roczny
Jakub Stec Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu Kraków Globalny lider w technologiach zasilania i automatyki ABB Prezentacja firmy 145,000 pracowników w 100 krajach Roczny
Instrukcja z przedmiotu Napęd robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
ROZWIĄZANIA WIZYJNE PRZEMYSŁOWE. Rozwiązania WIZYJNE. Capture the Power of Machine Vision POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD
 POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia
 Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F
 ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
Strategiczny program badań naukowych i prac rozwojowych Profilaktyka i leczenie chorób cywilizacyjnych STRATEGMED
 Opis przedmiotu zamówienia - specyfikacja techniczna Przedmiotem zamówienia jest: Dostawa, szkolenie, montaż i uruchomienie w siedzibie zamawiającego ramienia 6 osiowego o wysokiej precyzji pozycjonowania.
Opis przedmiotu zamówienia - specyfikacja techniczna Przedmiotem zamówienia jest: Dostawa, szkolenie, montaż i uruchomienie w siedzibie zamawiającego ramienia 6 osiowego o wysokiej precyzji pozycjonowania.
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
Tytuł Aplikacji: Aplikacja przetwornic częstotliwości Danfoss w sieci przemysłowej Profinet
 Poniższy artykuł został w pełni przygotowany przez Autoryzowanego Dystrybutora firmy Danfoss i przedstawia rozwiązanie aplikacyjne wykonane w oparciu o produkty z rodziny VLT Firma Danfoss należy do niekwestionowanych
Poniższy artykuł został w pełni przygotowany przez Autoryzowanego Dystrybutora firmy Danfoss i przedstawia rozwiązanie aplikacyjne wykonane w oparciu o produkty z rodziny VLT Firma Danfoss należy do niekwestionowanych
Politechnika Białostocka Wydział Elektryczny 20.11.2013 ZINTEGROWANA AUTOMATYKA B&R
 Politechnika Białostocka Wydział Elektryczny 20.11.2013 ZINTEGROWANA AUTOMATYKA B&R FIRMA B&R Najnowsza technologia Globalna dostępność Niezależność Portfolio produktów Kilka faktów o firmie B&R Założyciele
Politechnika Białostocka Wydział Elektryczny 20.11.2013 ZINTEGROWANA AUTOMATYKA B&R FIRMA B&R Najnowsza technologia Globalna dostępność Niezależność Portfolio produktów Kilka faktów o firmie B&R Założyciele
MELFA. Niezmienna jakość precyzyjne sterowanie. Roboty przemysłowe
 MITSUBISHI ELECTRIC FACTORY AUTOMATION MELFA Roboty przemysłowe Niezmienna jakość precyzyjne sterowanie Roboty ramieniowe /// Roboty Scara /// Precyzyjne kontrolery /// Oprogramowanie /// Symulacja ///
MITSUBISHI ELECTRIC FACTORY AUTOMATION MELFA Roboty przemysłowe Niezmienna jakość precyzyjne sterowanie Roboty ramieniowe /// Roboty Scara /// Precyzyjne kontrolery /// Oprogramowanie /// Symulacja ///
ROBOTY AUTOMATYZACJA PRODUKCJI
 ROBOTY AUTOMATYZACJA PRODUKCJI Roboty najnowszej generacji 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI PICKERSPX10 Robot przeznaczony do odbioru wlewków jak również
ROBOTY AUTOMATYZACJA PRODUKCJI Roboty najnowszej generacji 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI PICKERSPX10 Robot przeznaczony do odbioru wlewków jak również
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury. Czujniki stacjonarne.
 Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
W Laboratorium Robotyki znajdują się m.in.:
 W Laboratorium Robotyki znajdują się m.in.: robot Kawasaki FS003N z komputerem Kawasaki, kamerą ueye (z oryginalnymi kluczami dostępu), kontrolerem, Teach Pendant, przewodem do komunikacji między kamerą,
W Laboratorium Robotyki znajdują się m.in.: robot Kawasaki FS003N z komputerem Kawasaki, kamerą ueye (z oryginalnymi kluczami dostępu), kontrolerem, Teach Pendant, przewodem do komunikacji między kamerą,
CP1L. M i n i a t u r o w e s t e r o w n i k i m a s z y n. » Za a w a n s o w a n e f u n kc j e s t e rowa n i a r u c h e m
 CP1L M i n i a t u r o w e s t e r o w n i k i m a s z y n» D u ża s z y b k ość p r z e t w a r z a n i a» Za a w a n s o w a n e f u n kc j e s t e rowa n i a r u c h e m» Ł a t w e p o d ł a c z a n
CP1L M i n i a t u r o w e s t e r o w n i k i m a s z y n» D u ża s z y b k ość p r z e t w a r z a n i a» Za a w a n s o w a n e f u n kc j e s t e rowa n i a r u c h e m» Ł a t w e p o d ł a c z a n
Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi
 Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi PLASTECH 6-7 kwiecień 2017 Wittmann Group JACEK Denis Metral KULIŚ / 2016-10 Proces kontroli produkcji wtryskowni WWW ERP MES
Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi PLASTECH 6-7 kwiecień 2017 Wittmann Group JACEK Denis Metral KULIŚ / 2016-10 Proces kontroli produkcji wtryskowni WWW ERP MES
Rynek Ciepła Systemowego Puławy 10-12.02.2015. Sterowanie i monitoring węzłów cieplnych w oparciu o sterownik CLIMATIX DHN.
 Rynek Ciepła Systemowego Puławy 10-12.02.2015 Sterowanie i monitoring węzłów cieplnych w oparciu o sterownik CLIMAIX DHN Strona 1 Andrzej Romanowski, Siemens Sp. z o.o. Urządzenia regulacyjne węzłów cieplnych
Rynek Ciepła Systemowego Puławy 10-12.02.2015 Sterowanie i monitoring węzłów cieplnych w oparciu o sterownik CLIMAIX DHN Strona 1 Andrzej Romanowski, Siemens Sp. z o.o. Urządzenia regulacyjne węzłów cieplnych
Laboratorium Napędu robotów
 WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 3 Robot ramieniowy RV-3SB 1 Charakterystyka robota RV 3SB Roboty serii RV-3SB (rys. 1.1) opracowane
WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 3 Robot ramieniowy RV-3SB 1 Charakterystyka robota RV 3SB Roboty serii RV-3SB (rys. 1.1) opracowane
Roboty Staubli do zadań specjalnych: szybkie, odporne, kompaktowe
 Roboty Staubli do zadań specjalnych: szybkie, odporne, kompaktowe Agenda: Roboty Staubli do zadań specjalnych: szybkie, odporne, kompaktowe 1. Wagner-Service 2. Stäubli 3. SCARA seria TS 4. TX do pracy
Roboty Staubli do zadań specjalnych: szybkie, odporne, kompaktowe Agenda: Roboty Staubli do zadań specjalnych: szybkie, odporne, kompaktowe 1. Wagner-Service 2. Stäubli 3. SCARA seria TS 4. TX do pracy
Nowe spojrzenie na systemy monitoringu i sterowania sieciami ciepłowniczymi
 Nowe spojrzenie na systemy monitoringu i sterowania sieciami ciepłowniczymi Leszek Jabłoński Cele optymalizacja pracy sieci ciepłowniczej zwiększenie efektywności energetycznej większe bezpieczeństwo dostaw
Nowe spojrzenie na systemy monitoringu i sterowania sieciami ciepłowniczymi Leszek Jabłoński Cele optymalizacja pracy sieci ciepłowniczej zwiększenie efektywności energetycznej większe bezpieczeństwo dostaw
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
ROBOTY AUTOMATYZACJA PRODUKCJI
 ROBOTY AUTOMATYZACJA PRODUKCJI Roboty godne zaufania 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI ROBOT PNEUMATYCZNY TYPU PICKER SPRAWDZONA KONSTRUKCJA I IDEALNIE
ROBOTY AUTOMATYZACJA PRODUKCJI Roboty godne zaufania 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI ROBOT PNEUMATYCZNY TYPU PICKER SPRAWDZONA KONSTRUKCJA I IDEALNIE
Przegląd rodziny produktów. InspectorP64x Konfigurowalna. Programowalna. Ekonomiczna. Szybka. SYSTEMY WIZYJNE 2D
 Przegląd rodziny produktów InspectorP64x Konfigurowalna. Programowalna. Ekonomiczna. Szybka. Zalety A OWALNA. PROGRAMOWALNA. EKONOZYBKA. B C D funkcjonalność kamer 2D InspectorP6xx za pomocą aplikacji
Przegląd rodziny produktów InspectorP64x Konfigurowalna. Programowalna. Ekonomiczna. Szybka. Zalety A OWALNA. PROGRAMOWALNA. EKONOZYBKA. B C D funkcjonalność kamer 2D InspectorP6xx za pomocą aplikacji
DigiPoint Karta katalogowa DS 5.00
 1/5 f ggggg sterownik programowalny z wyświetlaczem LCD 2/5 OGÓLNA CHARAKTERYSTYKA Sterowniki są zaawansowanymi technologicznie swobodnie programowalnymi kontrolerami przeznaczonymi do sterowani oświetleniem,
1/5 f ggggg sterownik programowalny z wyświetlaczem LCD 2/5 OGÓLNA CHARAKTERYSTYKA Sterowniki są zaawansowanymi technologicznie swobodnie programowalnymi kontrolerami przeznaczonymi do sterowani oświetleniem,
Centrum wiertarsko-frezarskie MAKA PE 75
 Centrum wiertarsko-frezarskie MAKA PE 75 NOWA OPCJA W STANDARDZIE Portalna zabudowa maszyny Agregat frezujący: - 5-cio osiowy - chłodzony cieczą - moc 11 kw Agregat wiertarski: - 7 + 10 + 2 x 1 wierteł
Centrum wiertarsko-frezarskie MAKA PE 75 NOWA OPCJA W STANDARDZIE Portalna zabudowa maszyny Agregat frezujący: - 5-cio osiowy - chłodzony cieczą - moc 11 kw Agregat wiertarski: - 7 + 10 + 2 x 1 wierteł
Droga do Industry 4.0. siemens.com/tia
 Totally Integrated Automation dla Cyfrowych Przedsiębiorstw Droga do Industry 4.0. siemens.com/tia Na drodze do Cyfrowego Przedsiębiorstwa z firmą Siemens Internet stał się realną częścią rzeczywistości
Totally Integrated Automation dla Cyfrowych Przedsiębiorstw Droga do Industry 4.0. siemens.com/tia Na drodze do Cyfrowego Przedsiębiorstwa z firmą Siemens Internet stał się realną częścią rzeczywistości
3Motion - wieloosiowy sterownik ruchu Część 1. Informacje ogólne i hardware
 - wieloosiowy sterownik ruchu Część 1 Informacje ogólne i hardware to wieloosiowy programowalny sterownik ruchu z interpolacją liniową, kołową i obsługą G-kodów Profil ruchu osi: S-rampa prędkość przyspieszenie
- wieloosiowy sterownik ruchu Część 1 Informacje ogólne i hardware to wieloosiowy programowalny sterownik ruchu z interpolacją liniową, kołową i obsługą G-kodów Profil ruchu osi: S-rampa prędkość przyspieszenie
ul. Szyb Walenty Ruda Śląska
 MNIEJ PRZESTOJÓW W TWOJEJ FIRMIE Zwiększ wydajność i zyski swojej firmy, wybierając specjalistów w naprawach i dostawie elektroniki przemysłowej Kontroltek. Inżynierowie Kontroltek, dzięki swojemu wieloletniemu
MNIEJ PRZESTOJÓW W TWOJEJ FIRMIE Zwiększ wydajność i zyski swojej firmy, wybierając specjalistów w naprawach i dostawie elektroniki przemysłowej Kontroltek. Inżynierowie Kontroltek, dzięki swojemu wieloletniemu
1.1 PANELE OPERATORSKIE WONDERWARE
 1.1 PANELE OPERATORSKIE WONDERWARE PANEL INTOUCH CE panele bazujące na systemie operacyjnym Windows CE i wykorzystujące prostą wizualizację InTouch CE. Poza graficzną reprezentacją informacji z podłączonych
1.1 PANELE OPERATORSKIE WONDERWARE PANEL INTOUCH CE panele bazujące na systemie operacyjnym Windows CE i wykorzystujące prostą wizualizację InTouch CE. Poza graficzną reprezentacją informacji z podłączonych
Interfejs USB-RS485 KOD: INTUR. v.1.0. Zastępuje wydanie: 2 z dnia 19.12.2012
 Interfejs USB-RS485 v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Instalacja interfejsu w systemie operacyjnym.... 4 3. Przyłączenie
Interfejs USB-RS485 v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Instalacja interfejsu w systemie operacyjnym.... 4 3. Przyłączenie
witamy w świecie KUKA Robotics Robotyzacja według KUKA Roboter KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła Strona 1
 witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
Miejsce innowacyjnych systemów oświetleniowych LED w koncepcji Fabryka 4.0. Łukasz Manowiecki Industry Segment Marketeer Czerwiec 2017
 Miejsce innowacyjnych systemów oświetleniowych LED w koncepcji Fabryka 4.0 Łukasz Manowiecki Industry Segment Marketeer Czerwiec 2017 1 Każda firma, każdy człowiek potrzebuje wysokiej jakości światła DOM
Miejsce innowacyjnych systemów oświetleniowych LED w koncepcji Fabryka 4.0 Łukasz Manowiecki Industry Segment Marketeer Czerwiec 2017 1 Każda firma, każdy człowiek potrzebuje wysokiej jakości światła DOM
16 lat działalności. Certyfikat ISO 9001:2008. Strona główna > Firma > Wyróżnienia
 Strona główna > Firma > Wyróżnienia i partnerzy 16 lat działalności Pewność i bezpieczeństwo osiągnięte dzięki 16 letniemu doświadczeniu pozwalają ips Control oferować bezpieczeństwo i profesjonalizm,
Strona główna > Firma > Wyróżnienia i partnerzy 16 lat działalności Pewność i bezpieczeństwo osiągnięte dzięki 16 letniemu doświadczeniu pozwalają ips Control oferować bezpieczeństwo i profesjonalizm,
1.10 MODUŁY KOMUNIKACYJNE
 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO 1.10 MODUŁY KOMUNIKACYJNE IC200SET001 konwerter łącza RS (RS232 lub RS485) na Ethernet (10/100Mbit), obsługiwane protokoły: SRTP, Modbus TCP IC200USB001
ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO 1.10 MODUŁY KOMUNIKACYJNE IC200SET001 konwerter łącza RS (RS232 lub RS485) na Ethernet (10/100Mbit), obsługiwane protokoły: SRTP, Modbus TCP IC200USB001
6.2 RÓśNE WARIANTY PRACY
 6.2 RÓśNE WARIANTY PRACY WARIANT 1 wzmacniacz sterowany sygnałami PULSE ze sterownika VersaMax Micro PLUS sterownik VersaMax Micro Plus kable dołączone do wyjść PULSE i DIRECTION w sterowniku VersaMax
6.2 RÓśNE WARIANTY PRACY WARIANT 1 wzmacniacz sterowany sygnałami PULSE ze sterownika VersaMax Micro PLUS sterownik VersaMax Micro Plus kable dołączone do wyjść PULSE i DIRECTION w sterowniku VersaMax
INDUSTRIAL AUTOMATION
 INDUSTRIAL AUTOMATION INDUSTRIAL AUTOMATION www.controlsolutions.pl www.controlsolutions.pl O NAS W dobie globalizacji i coraz większej konkurencji koniecznością staje się poszukiwanie rozwiązań pozwalających
INDUSTRIAL AUTOMATION INDUSTRIAL AUTOMATION www.controlsolutions.pl www.controlsolutions.pl O NAS W dobie globalizacji i coraz większej konkurencji koniecznością staje się poszukiwanie rozwiązań pozwalających
PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B
 PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B PODSTAWOWE PARAMETRY TECHNICZNE: VMC850B Przesuwy X/Y/Z 1000 / 560 / 650 mm Maks. obciążenie stołu 600 kg Stożek wrzeciona SK40 - Maks. moc wrzeciona 9/10,5
PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B PODSTAWOWE PARAMETRY TECHNICZNE: VMC850B Przesuwy X/Y/Z 1000 / 560 / 650 mm Maks. obciążenie stołu 600 kg Stożek wrzeciona SK40 - Maks. moc wrzeciona 9/10,5
Proste programowanie. 3 tryby programowania zdalnego: automatyczny, półautomatyczny i ręczny
 Neomat LA Ø 58mm Neomat LA Idealny do rolet i markiz, ze zintegrowaną centralą sterującą i odbiornikiem, elektronicznym wyłącznikiem krańcowym i ruchem sterowanym enkoderem. Wymiar L Ø 58mm. System radiowy
Neomat LA Ø 58mm Neomat LA Idealny do rolet i markiz, ze zintegrowaną centralą sterującą i odbiornikiem, elektronicznym wyłącznikiem krańcowym i ruchem sterowanym enkoderem. Wymiar L Ø 58mm. System radiowy
CANopen Addon Manual
 Wprowadzenie. Zadaniem tego dokumentu jest przedstawienie podstawowych moŝliwości, konfiguracji oraz pierwszego uruchomienia sieci CANopen z panelami Pro-Face. Informacje ogólne. Sieć CAN open jest siecią
Wprowadzenie. Zadaniem tego dokumentu jest przedstawienie podstawowych moŝliwości, konfiguracji oraz pierwszego uruchomienia sieci CANopen z panelami Pro-Face. Informacje ogólne. Sieć CAN open jest siecią
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
Centrum obróbcze MAKA PE 80
 Centrum obróbcze MAKA PE 80 Maszyna wyposażona w dwa agregaty agregaty obróbcze : 5 oraz 3 osiowy MAKA CNC centrum frezarsko wiertarskie PE 80 - Budowa maszyny: portalna - Sterowanie Siemens 840D z procesorem
Centrum obróbcze MAKA PE 80 Maszyna wyposażona w dwa agregaty agregaty obróbcze : 5 oraz 3 osiowy MAKA CNC centrum frezarsko wiertarskie PE 80 - Budowa maszyny: portalna - Sterowanie Siemens 840D z procesorem
Sterowniki PLC seria NX700
 Sterowniki PLC seria NX700 Jednostki centralne CPU Pamięć programu 20K kroków (wbudowana), obsługa 1600 punktów (12 slotów i 1 rozszerzenie) lub do 2048 punktów w systemie oddalonych wejść/wyjść, 0,2 usek/instrukcję,
Sterowniki PLC seria NX700 Jednostki centralne CPU Pamięć programu 20K kroków (wbudowana), obsługa 1600 punktów (12 slotów i 1 rozszerzenie) lub do 2048 punktów w systemie oddalonych wejść/wyjść, 0,2 usek/instrukcję,
NX70 PLC www.atcontrol.pl
 NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
PikoCNC Board E v1.0 Copyright 2015 PPHU ELCOSIMO 1. PikoCNC Board E v1.0 wersja 1.0
 PikoCNC Board E v1.0 Copyright 2015 PPHU ELCOSIMO 1 PikoCNC Board E v1.0 wersja 1.0 PikoCNC Board E v1.0 Copyright 2015 PPHU ELCOSIMO 2 Podstawowe parametry Rodzaj komunikacji ETHERNET Rodzaj sterowania
PikoCNC Board E v1.0 Copyright 2015 PPHU ELCOSIMO 1 PikoCNC Board E v1.0 wersja 1.0 PikoCNC Board E v1.0 Copyright 2015 PPHU ELCOSIMO 2 Podstawowe parametry Rodzaj komunikacji ETHERNET Rodzaj sterowania
WObit dziś. Tworzenie może być naszą wspólną pasją. str. Karta katalogowa - TR v
 Robot Tower TR1200 WObit dziś Ponad dwadzieścia lat istnienia firmy WObit w istotny sposób wpłynęło na rozwój automatyki na polskim rynku. Firma została założona przez Witolda Ober na początku lat dziewięćdziesiątych.
Robot Tower TR1200 WObit dziś Ponad dwadzieścia lat istnienia firmy WObit w istotny sposób wpłynęło na rozwój automatyki na polskim rynku. Firma została założona przez Witolda Ober na początku lat dziewięćdziesiątych.
Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa
 Technologia napędowa \ Automatyzacja napędów \ Integracja systemowa \ Serwis Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa Lat 2 Zdecentralizowana jednostka napędowa Minimalny wysiłek
Technologia napędowa \ Automatyzacja napędów \ Integracja systemowa \ Serwis Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa Lat 2 Zdecentralizowana jednostka napędowa Minimalny wysiłek
DigiPoint mini Karta katalogowa DS 6.00
 1/5 sterownik programowalny z wyświetlaczem LCD 2/5 OGÓLNA CHARAKTERYSTYKA Sterowniki są zaawansowanymi technologicznie swobodnie programowalnym, kontrolerami przeznaczonymi do systemów sterowania oświetleniem,
1/5 sterownik programowalny z wyświetlaczem LCD 2/5 OGÓLNA CHARAKTERYSTYKA Sterowniki są zaawansowanymi technologicznie swobodnie programowalnym, kontrolerami przeznaczonymi do systemów sterowania oświetleniem,
ASEM UBIQUITY PRZEGLĄD FUNKCJONALNOŚCI
 ASEM UBIQUITY PRZEGLĄD FUNKCJONALNOŚCI tel. 22 549 43 53, fax. 22 549 43 50, www.sabur.com.pl, sabur@sabur.com.pl 1/7 ASEM UBIQUITY ASEM Uqiuity to nowatorskie rozwiązanie na platformy Win 32/64 oraz Win
ASEM UBIQUITY PRZEGLĄD FUNKCJONALNOŚCI tel. 22 549 43 53, fax. 22 549 43 50, www.sabur.com.pl, sabur@sabur.com.pl 1/7 ASEM UBIQUITY ASEM Uqiuity to nowatorskie rozwiązanie na platformy Win 32/64 oraz Win
Interfejs USB-TTL KOD: INTU. v.1.0. Wydanie: 3 z dnia Zastępuje wydanie: 2 z dnia
 Interfejs USB-TTL v.1.0 KOD: PL Wydanie: 3 z dnia 20.02.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny...3 2. Instalacja sterowników...4 3. Konfiguracja połączenia w programie PowerSecurity....5
Interfejs USB-TTL v.1.0 KOD: PL Wydanie: 3 z dnia 20.02.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny...3 2. Instalacja sterowników...4 3. Konfiguracja połączenia w programie PowerSecurity....5
1.1 SCHEMATY DLA PROJEKTANTÓW
 ASTOR SCHEMATY DLA PROJEKTANTÓW. SCHEMATY DLA PROJEKTANTÓW Sieć Komunikacja urządzeń GE Intelligent Platforms w sieci Komunikacja sterowników GE Intelligent Platforms w sieci z zastosowaniem redundancji
ASTOR SCHEMATY DLA PROJEKTANTÓW. SCHEMATY DLA PROJEKTANTÓW Sieć Komunikacja urządzeń GE Intelligent Platforms w sieci Komunikacja sterowników GE Intelligent Platforms w sieci z zastosowaniem redundancji
Kontroler CSMIO/IP-A oraz Mach4
 Kontroler CSMIO/IP-A oraz Mach4 Quick start strojenie osi 1) Konfiguracje rozpoczynamy od przydzielenia osi Motoru. Jak widać na zdjęciu osi X został przydzielony Motor0 (poradnik omawia konfiguracje osi
Kontroler CSMIO/IP-A oraz Mach4 Quick start strojenie osi 1) Konfiguracje rozpoczynamy od przydzielenia osi Motoru. Jak widać na zdjęciu osi X został przydzielony Motor0 (poradnik omawia konfiguracje osi
SZCZEGÓŁOWY OPIS PRZEDMIOTU ZAMÓWIENIA. Przetarg nieograniczony Dostawa stanowisk dydaktycznych do nauki protokołów Profinet oraz Profibus DP
 OR.272.11.2017 www.powiat.turek.pl P O W I A T T U R E C K I Powiat Innowacji i Nowoczesnych Technologii Załącznik nr 1 do SIWZ Dostawa stanowisk dydaktycznych do nauki protokołów Profinet oraz Profibus
OR.272.11.2017 www.powiat.turek.pl P O W I A T T U R E C K I Powiat Innowacji i Nowoczesnych Technologii Załącznik nr 1 do SIWZ Dostawa stanowisk dydaktycznych do nauki protokołów Profinet oraz Profibus
Interfejs USB-TTL KOD: INTU. v.1.0. Zastępuje wydanie: 3 z dnia
 Interfejs USB-TTL v.1.0 KOD: PL Wydanie: 4 z dnia 05.12.2013 Zastępuje wydanie: 3 z dnia 20.02.2013 SPIS TREŚCI 1. Opis ogólny.... 3 2. Instalacja sterowników.... 4 3. Konfiguracja połączenia w programie
Interfejs USB-TTL v.1.0 KOD: PL Wydanie: 4 z dnia 05.12.2013 Zastępuje wydanie: 3 z dnia 20.02.2013 SPIS TREŚCI 1. Opis ogólny.... 3 2. Instalacja sterowników.... 4 3. Konfiguracja połączenia w programie
X Konferencja Techniczna IGCP Warszawa Sterowanie i monitoring węzłów cieplnych w oparciu o sterownik CLIMATIX DHN.
 X Konferencja echniczna IGCP Warszawa 06-07.11.2014 Sterowanie i monitoring węzłów cieplnych w oparciu o sterownik CLIMAIX DHN Strona 1 Andrzej Romanowski, Siemens Sp. z o.o. Urządzenia regulacyjne węzłów
X Konferencja echniczna IGCP Warszawa 06-07.11.2014 Sterowanie i monitoring węzłów cieplnych w oparciu o sterownik CLIMAIX DHN Strona 1 Andrzej Romanowski, Siemens Sp. z o.o. Urządzenia regulacyjne węzłów
ZAUTOMATYZUJ SIĘ. Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka
 ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O nas Firma WIKPER powstała w 2001 roku. Nasza siedziba znajduje się w miejscowości Grębów, województwo podkarpackie.
ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O nas Firma WIKPER powstała w 2001 roku. Nasza siedziba znajduje się w miejscowości Grębów, województwo podkarpackie.
Creative Engineering
 www.myrma.eu Creative Engineering Podstawowe informacje o RMA 10 lat doświadczenia Ponad 45-osobowy zespół inżynierów i specjalistów Własne laboratorium spawalnicze Profesjonalny zespół R&D Współpraca
www.myrma.eu Creative Engineering Podstawowe informacje o RMA 10 lat doświadczenia Ponad 45-osobowy zespół inżynierów i specjalistów Własne laboratorium spawalnicze Profesjonalny zespół R&D Współpraca
MODEMY ASTRAADA GSM ASTOR KATALOG SYSTEMÓW KOMUNIKACJI ASTRAADA GSM. AS30GSM101C Astraada GSM; Modem GSM/GPRS RB900 z RS232; Obsługa SMS
 ASTOR KATALOG SYSTEMÓW KOMUNIKACJI ASTRAADA GSM MODEMY ASTRAADA GSM AS30GSM101C Astraada GSM; Modem GSM/GPRS RB900 z RS232; 850/900/1800/1900 MHz; Programowanie w języku C lub Python oraz komendami AT,
ASTOR KATALOG SYSTEMÓW KOMUNIKACJI ASTRAADA GSM MODEMY ASTRAADA GSM AS30GSM101C Astraada GSM; Modem GSM/GPRS RB900 z RS232; 850/900/1800/1900 MHz; Programowanie w języku C lub Python oraz komendami AT,
UWAGA: w zależności od zamówienia od poniższych cen oferujemy atrakcyjne rabaty!
 Cennik nie stanowi oferty handlowej w rozumieniu kodeksu cywilnego. Cennik może ulec zmianie. CENNIK DETALICZNY [ceny netto zł] UWAGA: w zależności od zamówienia od poniższych cen oferujemy atrakcyjne
Cennik nie stanowi oferty handlowej w rozumieniu kodeksu cywilnego. Cennik może ulec zmianie. CENNIK DETALICZNY [ceny netto zł] UWAGA: w zależności od zamówienia od poniższych cen oferujemy atrakcyjne
Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet.
 Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet. Przygotowanie urządzeń W prezentowanym przykładzie adresy IP sterowników
Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet. Przygotowanie urządzeń W prezentowanym przykładzie adresy IP sterowników
WObit dziś. Tworzenie może być naszą wspólną pasją. str. Karta katalogowa - TR v
 Robot Tower TR300 WObit dziś Ponad dwadzieścia lat istnienia firmy WObit w istotny sposób wpłynęło na rozwój automatyki na polskim rynku. Firma została założona przez Witolda Obera na początku lat dziewięćdziesiątych.
Robot Tower TR300 WObit dziś Ponad dwadzieścia lat istnienia firmy WObit w istotny sposób wpłynęło na rozwój automatyki na polskim rynku. Firma została założona przez Witolda Obera na początku lat dziewięćdziesiątych.
Lista projektów. Roboty Fanuc. VW Pamplona (SP)
") VW Pamplona (SP) Roboty Fanuc Programowanie robotów Fanuc. Optymalizacja czasu pracy linii. Standaryzacja programów. Aplikacje: zgrzewanie punktowe, nakładanie kleju. Cornaglia (PL) Robot Kuka KRC1 Diagnostyka
VW Pamplona (SP) Roboty Fanuc Programowanie robotów Fanuc. Optymalizacja czasu pracy linii. Standaryzacja programów. Aplikacje: zgrzewanie punktowe, nakładanie kleju. Cornaglia (PL) Robot Kuka KRC1 Diagnostyka
Instrukcja instalacji połączenia sterownika PL11-MUT24 ze stroną internetową.
 Instrukcja instalacji połączenia sterownika PL11-MUT24 ze stroną internetową. Wymagania systemowe: Windows XP, Windows Vista, Windows 7 Krok pierwszy- serwer: 1. Do poprawnego działania aplikacji wymagane
Instrukcja instalacji połączenia sterownika PL11-MUT24 ze stroną internetową. Wymagania systemowe: Windows XP, Windows Vista, Windows 7 Krok pierwszy- serwer: 1. Do poprawnego działania aplikacji wymagane
Koncentrator komunikacyjny Ex-mBEL_COM
 Koncentrator komunikacyjny Ex-mBEL_COM Ex-mBEL_COM - koncentrator komunikacyjny Przeznaczenie Ex-mBEL_COM jest koncentratorem dla urządzeń z rodziny Ex-mBEL lub innych urządzeń cyfrowych (zabezpieczeń,
Koncentrator komunikacyjny Ex-mBEL_COM Ex-mBEL_COM - koncentrator komunikacyjny Przeznaczenie Ex-mBEL_COM jest koncentratorem dla urządzeń z rodziny Ex-mBEL lub innych urządzeń cyfrowych (zabezpieczeń,
1 interfejs szeregowy (RS232, RS485, RS422) 2x nadrzędne porty USB 1 gniazdo karty SD. Typ. TX507-P3CV01 Nr kat
 2x nadrzędne porty USB 1 gniazdo karty SD. Typ. TX507-P3CV01 Nr kat") Wyświetlacz kolorowy 7" TFT Podświetlenie LED Rozdzielczość 800 x 480 pikseli Kolory: 64 K Rezystancyjny ekran dotykowy 2 porty ethernetowe RJ45 ze zintegrowanym switchem 1 interfejs szeregowy (RS232,
Wyświetlacz kolorowy 7" TFT Podświetlenie LED Rozdzielczość 800 x 480 pikseli Kolory: 64 K Rezystancyjny ekran dotykowy 2 porty ethernetowe RJ45 ze zintegrowanym switchem 1 interfejs szeregowy (RS232,
IRB PODSUMOWANIE:
 IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
BCS-NVR0402. Rejestrator sieciowy IP 4 kanałowy
 BCS-NVR0402 Rejestrator sieciowy IP 4 kanałowy Kanały wideo: 4 Switch PoE: Nie BCS-NVR0402: 4 kanały wideo. Rejestrator może obsługiwać nagrywanie w czasie rzeczywistym D1(25 kl/s) na 4 kanał. Prędkość
BCS-NVR0402 Rejestrator sieciowy IP 4 kanałowy Kanały wideo: 4 Switch PoE: Nie BCS-NVR0402: 4 kanały wideo. Rejestrator może obsługiwać nagrywanie w czasie rzeczywistym D1(25 kl/s) na 4 kanał. Prędkość
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Biomonitoring system kontroli jakości wody
 FIRMA INNOWACYJNO -WDROŻENIOWA ul. Źródlana 8, Koszyce Małe 33-111 Koszyce Wielkie tel.: 0146210029, 0146360117, 608465631 faks: 0146210029, 0146360117 mail: biuro@elbit.edu.pl www.elbit.edu.pl Biomonitoring
FIRMA INNOWACYJNO -WDROŻENIOWA ul. Źródlana 8, Koszyce Małe 33-111 Koszyce Wielkie tel.: 0146210029, 0146360117, 608465631 faks: 0146210029, 0146360117 mail: biuro@elbit.edu.pl www.elbit.edu.pl Biomonitoring
Karta charakterystyki online. V3S153-1AAAAAAP01 Visionary-B SYSTEMY WIZYJNE 3D
 Karta charakterystyki online V3S153-1AAAAAAP01 Visionary-B A B C D E F H I J K L M N O P Q R S T Informacje do zamówienia Typ Nr artykułu V3S153-1AAAAAAP01 1072939 Więcej wersji urządzeń i akcesoriów www.sick.com/visionary-b
Karta charakterystyki online V3S153-1AAAAAAP01 Visionary-B A B C D E F H I J K L M N O P Q R S T Informacje do zamówienia Typ Nr artykułu V3S153-1AAAAAAP01 1072939 Więcej wersji urządzeń i akcesoriów www.sick.com/visionary-b
AP3.8.4 Adapter portu LPT
 AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
Informator techniczny
 Praca VersaMax jako urządzenia Master w protokole Profibus DP i I/O Device w protokole Profinet Przykład komunikacji: - pomiędzy kontrolerem RX3i a układem wejść/wyjść rozproszonych VersaMax w protokole
Praca VersaMax jako urządzenia Master w protokole Profibus DP i I/O Device w protokole Profinet Przykład komunikacji: - pomiędzy kontrolerem RX3i a układem wejść/wyjść rozproszonych VersaMax w protokole
PRODUKTY BEZPIECZEŃSTWA. Przegląd produktów ABB Jokab Safety
 PRODUKTY BEZPIECZEŃSTWA Przegląd produktów ABB Jokab Safety 2 PRZEGLĄD PRODUKTÓW ABB JOKAB SAFETY Dostarczamy i obsługujemy najwyższej jakości inteligentne rozwiązania z zakresu bezpieczeństwa maszyn w
PRODUKTY BEZPIECZEŃSTWA Przegląd produktów ABB Jokab Safety 2 PRZEGLĄD PRODUKTÓW ABB JOKAB SAFETY Dostarczamy i obsługujemy najwyższej jakości inteligentne rozwiązania z zakresu bezpieczeństwa maszyn w
NX700 PLC www.atcontrol.pl
 NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
CONCEPTRONIC. Instrukcja Instalacji i Obsługi
 CONCEPTRONIC Bezprzewodowa karta sieciowa USB C150RU/C150NANO/C150UAN/C150UAND/C300RU Instrukcja Instalacji i Obsługi Produkt posiada 5-letnią gwarancję Dane kontaktowe serwisu: Email: serwis@impakt.com.pl
CONCEPTRONIC Bezprzewodowa karta sieciowa USB C150RU/C150NANO/C150UAN/C150UAND/C300RU Instrukcja Instalacji i Obsługi Produkt posiada 5-letnią gwarancję Dane kontaktowe serwisu: Email: serwis@impakt.com.pl
Monitoring the fastening process. Techsystem. Opis. www.techsystem.pl. www.aimco-global.com
 Techsystem Monitor dokręcania AIMCO Opis System ATM W skład systemu wchodzi: Jednostka bazowa ATM-1-1 Przewód, przetwornik i zawór nadmiarowy Oprogramowanie PC i interfejsy do komunikacji Zalety systemu
Techsystem Monitor dokręcania AIMCO Opis System ATM W skład systemu wchodzi: Jednostka bazowa ATM-1-1 Przewód, przetwornik i zawór nadmiarowy Oprogramowanie PC i interfejsy do komunikacji Zalety systemu
T200. The Guiding System, Doświadczenie. nowa droga do realizacji
 Doświadczenie światowego lidera w aparaturze SN zapewnia funkcję zdalnego sterowania doskonale zintegrowaną z Waszą siecią bazujący na 20 letniej współpracy z naszymi klientami zapewnia im: Większą otwartość:
Doświadczenie światowego lidera w aparaturze SN zapewnia funkcję zdalnego sterowania doskonale zintegrowaną z Waszą siecią bazujący na 20 letniej współpracy z naszymi klientami zapewnia im: Większą otwartość:
Dysk CD (ze sterownikami i podręcznikiem użytkownika) Kabel USB 2.0
 Kabel USB 2.0") Urządzenie działa z systemami operacyjnymi Windows XP, 2000, Me i 98SE. DUB-A2 Szybka karta PCI z 2 portami USB 2.0 Przed rozpoczęciem Do korzystania z urządzenia niezbędne są następujące elementy Windows
Urządzenie działa z systemami operacyjnymi Windows XP, 2000, Me i 98SE. DUB-A2 Szybka karta PCI z 2 portami USB 2.0 Przed rozpoczęciem Do korzystania z urządzenia niezbędne są następujące elementy Windows
MODUŁY I/O I KONWERTERY
 MODUŁY I/O I KONWERTERY Moduły i konwertery znajdują zastosowanie w wielu aplikacjach: Systemy monitoringu sygnałów Rozszerzenie wejść i wyjść sterowników PLC Transmisja radiowa i szeregowa sygnałów automatyki
MODUŁY I/O I KONWERTERY Moduły i konwertery znajdują zastosowanie w wielu aplikacjach: Systemy monitoringu sygnałów Rozszerzenie wejść i wyjść sterowników PLC Transmisja radiowa i szeregowa sygnałów automatyki
INTELIGENTNA AUTOMATYZACJA Z EASY ROBOTS
 INTELIGENTNA AUTOMATYZACJA Z EASY ROBOTS Najmniejszy i najszybszy z robotów przemysłowych firmy Easy Robots, 6-osiowy manipulator ES5, waży zaledwie 27 kg i może manipulować ładunkami o masie do 5 kg.
INTELIGENTNA AUTOMATYZACJA Z EASY ROBOTS Najmniejszy i najszybszy z robotów przemysłowych firmy Easy Robots, 6-osiowy manipulator ES5, waży zaledwie 27 kg i może manipulować ładunkami o masie do 5 kg.
Instrukcja obsługi AP3.8.4 Adapter portu LPT
 Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
Usprawnij swoją produkcję
 Usprawnij swoją produkcję Manipulatory Specyfikacje 2 Marka Plastigo Plastigo to marka, która należy do grona liderów wśród polskich dostawców wtryskarek oraz urządzeń peryferyjnych. Bogaty asortyment
Usprawnij swoją produkcję Manipulatory Specyfikacje 2 Marka Plastigo Plastigo to marka, która należy do grona liderów wśród polskich dostawców wtryskarek oraz urządzeń peryferyjnych. Bogaty asortyment
Czujnik fotoelektryczny Laserowy czujnik odległości (triangulacja) Q4XTKLAF100-Q8
 Q4XTKLAF100-Q8") Transmisja danych procesowych oraz parametryzacja za pomocą IO-Link Wyświetlacz LED 4-cyfrowy 7-segmentowy 3 przyciski Wskaźnik wyjściowy (żółty) IP67/69K Certyfikat ECOLAB Zakres detekcji: 25 100 mm Laser
Transmisja danych procesowych oraz parametryzacja za pomocą IO-Link Wyświetlacz LED 4-cyfrowy 7-segmentowy 3 przyciski Wskaźnik wyjściowy (żółty) IP67/69K Certyfikat ECOLAB Zakres detekcji: 25 100 mm Laser
2.7 MODUŁY KOMUNIKACYJNE
 ASTOR KATALOG SYSTEMÓW STEROWANIA HORNER APG 2.7 MODUŁY KOMUNIKACYJNE HECOM650 moduł komunikacyjny Master sieci CANopen HECOS600 moduł komunikacyjny Slave sieci CANopen HEDNM650 moduł komunikacyjny Master
ASTOR KATALOG SYSTEMÓW STEROWANIA HORNER APG 2.7 MODUŁY KOMUNIKACYJNE HECOM650 moduł komunikacyjny Master sieci CANopen HECOS600 moduł komunikacyjny Slave sieci CANopen HEDNM650 moduł komunikacyjny Master
Karta charakterystyki online. V3T13S-MR62A8 TriSpector1000 SYSTEMY WIZYJNE 3D
 Karta charakterystyki online V3T13S-MR62A8 TriSpector1000 A B C D E F I J K L M N O P Q R S T Szczegółowe dane techniczne Cechy Zadanie Technologia Zestaw narzędzi Odstęp roboczy Przykładowe pole widzenia
Karta charakterystyki online V3T13S-MR62A8 TriSpector1000 A B C D E F I J K L M N O P Q R S T Szczegółowe dane techniczne Cechy Zadanie Technologia Zestaw narzędzi Odstęp roboczy Przykładowe pole widzenia
Laboratorium Napędu robotów
 WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 1 Robot typu SCARA - RP-1AH 1 Charakterystyka robota RP 1AH. Rys. 1.1. Robot RP 1AH Roboty z podwójnym
WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 1 Robot typu SCARA - RP-1AH 1 Charakterystyka robota RP 1AH. Rys. 1.1. Robot RP 1AH Roboty z podwójnym
Tokarka CNC z możliwością frezowania TBI TC 500 SMCY
 Tokarka CNC z możliwością frezowania TBI TC 500 SMCY Tokarka przygotowana do pracy z podajnikiem pręta, wyposażona w oś Y, umożliwiająca wysokowydajną produkcję seryjną detali. Ver_042018_04 TBI TC 500
Tokarka CNC z możliwością frezowania TBI TC 500 SMCY Tokarka przygotowana do pracy z podajnikiem pręta, wyposażona w oś Y, umożliwiająca wysokowydajną produkcję seryjną detali. Ver_042018_04 TBI TC 500
Przyszłość automatyzacji w logistyce zaczyna się dziś. Korzyści. Oddziały MiR Dystrybutorzy MiR
 Przyszłość automatyzacji w logistyce zaczyna się dziś Firma Mobile Industrial Robots (MiR) to wiodący producent współpracujących robotów mobilnych. Tworzymy przyjazne dla użytkownika, wszechstronne i bezpieczne
Przyszłość automatyzacji w logistyce zaczyna się dziś Firma Mobile Industrial Robots (MiR) to wiodący producent współpracujących robotów mobilnych. Tworzymy przyjazne dla użytkownika, wszechstronne i bezpieczne
MOBOTIX M15D-AllroundDual Camera Dualna. Modułowa. Unikalna. Broszura informacyjna z dnia 01.06.2013
 MOBOTIX M15D-AllroundDual Camera Dualna. Modułowa. Unikalna. Broszura informacyjna z dnia 01.06.2013 Zgodna z oryginałem: odporna na warunki atmosferyczne, solidny następca dualnej kamery MOBOTIX. Oferuje
MOBOTIX M15D-AllroundDual Camera Dualna. Modułowa. Unikalna. Broszura informacyjna z dnia 01.06.2013 Zgodna z oryginałem: odporna na warunki atmosferyczne, solidny następca dualnej kamery MOBOTIX. Oferuje
Kabel USB 2.0 do połączenia komputerów PCLinq2 (PL-2501) podręcznik uŝytkownika
 podręcznik uŝytkownika") Kabel USB 2.0 do połączenia komputerów PCLinq2 (PL-2501) podręcznik uŝytkownika Wprowadzenie Kabel USB 2.0 do połączenia komputerów PCLinq2 to znakomite rozwiązanie do szybkiego utworzenia sieci peer-to-peer
Kabel USB 2.0 do połączenia komputerów PCLinq2 (PL-2501) podręcznik uŝytkownika Wprowadzenie Kabel USB 2.0 do połączenia komputerów PCLinq2 to znakomite rozwiązanie do szybkiego utworzenia sieci peer-to-peer
dotyczy ZAPYTANIA OFERTOWEGO nr. 01/IV/2014
 Zielona Góra, 06.10.2014 r. FORMULARZ OFERTY Nazwa i siedziba Wykonawcy...... Osoba uprawniona do kontaktu z Zamawiającym (imię, nazwisko, stanowisko):... Nr tel:... Fax:... e-mail:... REGON:. NIP:.. dotyczy
Zielona Góra, 06.10.2014 r. FORMULARZ OFERTY Nazwa i siedziba Wykonawcy...... Osoba uprawniona do kontaktu z Zamawiającym (imię, nazwisko, stanowisko):... Nr tel:... Fax:... e-mail:... REGON:. NIP:.. dotyczy
Modularny system I/O IP67
 Modularny system I/O IP67 Tam gdzie kiedyś stosowano oprzewodowanie wielożyłowe, dziś dominują sieci obiektowe, zapewniające komunikację pomiędzy systemem sterowania, urządzeniami i maszynami. Systemy
Modularny system I/O IP67 Tam gdzie kiedyś stosowano oprzewodowanie wielożyłowe, dziś dominują sieci obiektowe, zapewniające komunikację pomiędzy systemem sterowania, urządzeniami i maszynami. Systemy
ROBOT SPAWALNICZY PRECYZYJNY SZYBKI EFEKTYWNY ŁATWA OBSŁUGA. EasyWelder
 ROBOT SPAWALNICZY PRECYZYJNY SZYBKI EFEKTYWNY ŁATWA OBSŁUGA EasyWelder Rewolucyjny robot spawalniczy - EasyWelder Intuicyjne i szybkie programowanie ścieżek gwarantuje efektywne i precyzyjne spawanie nawet
ROBOT SPAWALNICZY PRECYZYJNY SZYBKI EFEKTYWNY ŁATWA OBSŁUGA EasyWelder Rewolucyjny robot spawalniczy - EasyWelder Intuicyjne i szybkie programowanie ścieżek gwarantuje efektywne i precyzyjne spawanie nawet
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ
 KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
Kompletny produkt HMI. Proste zastosowania w niskiej cenie. Duża liczba współpracujących protokołów
 WOP Panele Operatorskie Jarosław Molenda Jaroslaw.molenda@elmark.com.pl Elmark Automatyka Sp. z o.o. Dlaczego Panele Operatorskie?? Kompletny produkt HMI Wzrost zastosowań w rynku automatyki Proste zastosowania
WOP Panele Operatorskie Jarosław Molenda Jaroslaw.molenda@elmark.com.pl Elmark Automatyka Sp. z o.o. Dlaczego Panele Operatorskie?? Kompletny produkt HMI Wzrost zastosowań w rynku automatyki Proste zastosowania
MODUŁ ETHERNETOWY DS202
 Zakład Elektroniki i Automatyki FRISKO s.c. 54-530 Wrocław, ul. Jarnołtowska 15 tel. 071 3492568, 071 7224051, fax. 071 7224053 e-mail: frisko@frisko.pl www.frisko.pl MODUŁ ETHERNETOWY DS202 PRZEZNACZENIE
Zakład Elektroniki i Automatyki FRISKO s.c. 54-530 Wrocław, ul. Jarnołtowska 15 tel. 071 3492568, 071 7224051, fax. 071 7224053 e-mail: frisko@frisko.pl www.frisko.pl MODUŁ ETHERNETOWY DS202 PRZEZNACZENIE
Research & Development. Zespół R&D
 Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski