SATELITARNE TECHNIKI POMIAROWE WYKŁAD 10
|
|
|
- Dagmara Czarnecka
- 6 lat temu
- Przeglądów:
Transkrypt

1 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 10 1
2 Źródła błędów w pomiarach GNSS Błędy wyznaczania pozycji w systemach zaliczanych do GNSS można podzielić na następujące grupy: 1. Błędy pozycji satelitów. 2. Błędy w wyniku zakłóceń propagacyjnych. 3. Błędy urządzeń nadawczych i odbiorczych. 4. Błędy pozycji stacji obserwacyjnej i stacji nawiązania. 5. Błędy parametrów ruchu obrotowego Ziemi. 6. Błędy opracowania obserwacji GNSS. 7. Błędy wynikające z celowego ograniczenia precyzji. Także geometria satelitów ma wpływ na parametry rozkładu wielowymiarowego błędów na powierzchni Ziemi. Występuje również problem utraty cykli cycle slip. 2
3 Błędy pozycji satelitów Błędy pozycji satelitów spowodowane są takimi czynnikami, jak: pole grawitacyjne Ziemi, opór atmosfery, grawitacyjne oddziaływanie Słońca i Księżyca oraz innych ciał niebieskich, ciśnienie promieniowania słonecznego, pływy skorupy ziemskiej, pływy oceaniczne, oddziaływanie sil elektromagnetycznych, efekty relatywistyczne. Do dalszej redukcji błędów efemeryd wykorzystać można dane precyzyjne efemeryd w formacie SP3 (dane ze stacji IGS udostępniane w Internecie). 3
4 Błędy propagacji w atmosferze Błędy związane z propagacją sygnału w atmosferze mają największy wpływ na wyniki opracowania obserwacji GPS. Spowodowane są: refrakcją jonosferyczna, refrakcja troposferyczną. 4
5 Błędy urządzeń nadawczych i odbiorczych Błędy urządzeń nadawczych i odbiorczych są spowodowane głównie: niestabilnością wzorców częstotliwości satelity i odbiornika, szumami własnymi odbiornika, zmiennością centrum fazowego anten GPS (Phase Center Variations: PCV) zarówno nadawczej, jak i odbiorczej, interferencją fal wtórnych (wielotorowość lub wielodrożność sygnału). Niestabilność wzorców częstotliwości satelity i odbiornika jest eliminowana w procesie opracowania obserwacji GPS. Szumy własne odbiornika spowodowane są działaniem urządzeń elektronicznych w nim zastosowanych i nie są możliwe do wyeliminowania. Przesunięcia centrów fazowych anten nadawczych względem fizycznego punktu anteny tzw. punktu referencyjnego (Antenna Reference Point: ARP) dla poszczególnych satelitów GPS są udostępniane przez administratora systemu. 5
6 Zmienność centrum fazowego anteny GPS Problem niepokrywania się punktu rzeczywistego centrum fazowego anteny satelitarnej z punktem nominalnym (zaznaczonym na antenie lub wskazanym przez producenta w instrukcji) był znany już dla anten satelitarnych odbiorników dopplerowskich. Odpowiednie poprawki uzyskiwano podczas procedur kalibracyjnych, a następnie uwzględniano w procesie redukcji wyników obserwacji. Podobne postępowanie zalecano dla anten GPS. 6
7 Zmienność centrum fazowego anteny GPS Złożoność problemu wykazano, gdy przeprowadzono i opracowano precyzyjne pomiary GPS na długich cięciwach parą odbiorników różnych firm (M. Rothacher z Uniwersytetu w Bernie). Przystąpiono do systematycznych badań laboratoryjnych zjawiska i okazało się, że wszystkie anteny GPS wykazują zmienność położenia centrum fazowego w zależności od kierunku, z którego dociera do nich sygnał satelitarny, czyli od jego azymutu i odległości zenitalnej. Badania wykazały, że położenie centrum fazowego anteny przemieszcza się różnie dla częstotliwości L1 i L2 tego samego odbiornika i tej samej anteny. Przemieszczenia te mieszczą się w granicach 2.5 mm w horyzoncie i aż do 10.7 cm w pionie. 7

8 Zmienność centrum fazowego anteny GPS Położenie centrum fazowego anteny odbiornika Trimble SST w zależności od azymutu i odległości zenitalnej: z lewej dla częstotliwości L1, z prawej dla częstotliwości L2 (wg. Rockena, 1992) 8
9 Zmienność centrum fazowego anteny GPS Badania wówczas prowadzone wykazały, że stosując anteny różnych typów na obu końcach cięciwy, możemy się obawiać wystąpienia błędów systematycznych wysokości dochodzących do 10 cm. Problem nie objawia się tak drastycznie dla anten tej samej firmy i dla niewielkich, kilkudziesięciokilometrowych odległości anten. Wówczas przemieszczenia centrów fazowych anten tego samego typu, aczkolwiek mogą być znaczne, to jednak z uwagi na zbliżony kierunek satelity względem obu anten redukują się niemalże całkowicie w pomiarze różnicowym. Większe odległości pomiędzy antenami nawet tego samego typu sprawiają, że wzajemna orientacja satelity i każdej z anten może różnić się znacznie. W przypadku różnych anten systematyczny błąd wysokości może być znaczny bez względu na odległość pomiędzy stacjami pomiarowymi. Błąd ten będzie zależny jedynie od charakterystyk fazowych obu anten. 9
10 Zmienność centrum fazowego anteny GPS Firmowe pakiety oprogramowania standardowego nie zawierały kiedyś udoskonaleń pozwalających na uwzglądnianie zmiennych centów fazowych anten. Dlatego też użytkownik techniki GPS nie powinien być zdziwiony, gdy uzyskiwał dochodzące do 10 cm błędy systematyczne wysokości, wykorzystując wyniki obserwacji niejednorodnym sprzętem pomiarowym i opracowane standardowymi programami. 10
11 Zmienność centrum fazowego anteny GPS Wyznaczanie pozycji GNSS odnosi się do elektrycznego centrum fazowego anteny odbiorczej. W precyzyjnym pozycjonowaniu jest zatem niezmiernie ważne dokładne określenie położenia centrum fazowego. Szczególnie ma to znaczenie dla składowej wysokościowej i ma ścisły związek z troposferą oraz wysokością topocentryczną satelity. Położenie centrum fazowego określa się względem fizycznego punktu anteny, tzw. punktu referencyjnego (Antenna Reference Point: ARP). 11
12 Zmienność centrum fazowego anteny GPS Równanie położenia centrum fazowego anteny względem punktu ARP: gdzie: offset główny względem punktu referencyjnego ARP [m], wektor jednostkowy kierunku do satelity SV, zmiana położenia centrum fazowego zależna od azymutu α i odległości zenitalnej z (lub wysokości topocentrycznej ε = 90 z) satelity [m]. Offset główny wyznacza się przez podanie trzech składowych (północnej N, wschodniej E oraz pionowej U); określa on położenie centrum fazowego anteny względem ARP jako stałe. Taka charakterystyka, wykorzystywana w programach komercyjnych, jest niewystarczająca w przypadku opracowań precyzyjnych. Dla takich opracowań konieczne jest wyznaczenie drugiego członu równania, czyli zmian położenia centrum fazowego anteny jako funkcji azymutu i odległości zenitalnej satelity. 12
13 Zmienność centrum fazowego anteny GPS Stosowane są obecnie trzy sposoby wyznaczania zmian położenia centrum fazowego anteny odbiorczej jako funkcji azymutu i wysokości satelity nad horyzontem (wysokości topocentrycznej). Pierwszy z nich to kalibracja w specjalnych komorach pochłaniających fale elektromagnetyczne. Ze względu na małą liczbę komór kalibracje anten tą metodą nie są powszechnie stosowane. W Europie komora pochłaniająca fale elektromagnetyczne o częstotliwości > 0.5 MHz o wymiarach 41 x 16 x 14 m znajduje się w EMV-Testzentrum der Bundeswehr in Greding w Niemczech. 13
14 Zmienność centrum fazowego anteny GPS Drugim sposobem wyznaczania zmian położenia centrum fazowego anten odbiorników satelitarnych GPS/GLONASS są względne kalibracje polowe prowadzone przez IGS oraz amerykański NGS (National Geodetic Survey). Dane NGS są akceptowane przez większość programów wykorzystywanych w obliczeniach precyzyjnych, jak np. Bernese GPS Software (AIUB), GAMIT/GLOBK (MIT), GIPSY-OASIS II (JPL). 14

15 Zmienność centrum fazowego anteny GPS Trzecim sposobem jest metoda polowej kalibracji bezwzględnej anten. Sposób ten został opracowany na Uniwersytecie w Hanowerze przy współpracy z firmą Geo++ GmbH. Polega on na kalibracji bezpośrednio w terenie z użyciem precyzyjnego robota. Pomiary kalibracyjne wykonywane są przy kilku tysiącach różnych położeń anteny (obroty i pochylenia) oraz minimum przez dwie doby celem eliminacji wpływu błędu wielotorowości. Autorzy tej metody kalibracji podkreślają, że jest to metoda wyznaczania zmian bezwzględnych centrum fazowego i nie wymaga anteny referencyjnej. Daje ona wyniki w czasie rzeczywistym i jest wolna od wpływu błędów wielotorowości. Można nią wykonywać kalibrację bezpośrednio na punktach sieci, dlatego zalecana jest jako metoda kalibracji anten na stacjach permanentnych sieci GNSS (GPS/Glonass). 15
 i odbicia sygnałów pochodzących z anteny od różnych przedmiotów terenowych. Pierwsze z nich może obniżać bardzo znacznie dokładności wyznaczania pozycji.")
16 Błędy wielotorowości, wielodrogowości (multipath) Dwa zjawiska związane z właściwościami fizycznymi otoczenia terenowego anteny GPS mogą wpływać zakłócająco na pomiary: odbieranie odbitych sygnałów satelitarnych (multipath) i odbicia sygnałów pochodzących z anteny od różnych przedmiotów terenowych. Pierwsze z nich może obniżać bardzo znacznie dokładności wyznaczania pozycji. Można by twierdzić, że mamy do czynienia z jednym tylko zjawiskiem - odbiciami. Tak jest tylko z punktu widzenia fizycznej natury zjawiska. Jeśli jednak wziąć pod uwagę efekty uwidaczniające się w wynikach pomiarów, trzeba rozróżniać odbiór odbitych sygnałów satelitarnych odbić sygnałów pochodzących z anteny. 16
17 Błędy wielotorowości Odbiór odbitych sygnałów satelitarnych polega na tym, że do anteny odbiornika docierają i są rejestrowane dwa sygnały zamiast jednego generowanego przez satelitę. Są one przesunięte w czasie, gdyż każdy z nich przebył inną drogę. Dzieje się tak z powodu odbicia sygnału od różnych przedmiotów terenowych, głównie metalowych dachów pobliskich budynków, metalowych ogrodzeń itp., tak położonych w stosunku do anteny, że sygnał satelitarny od nich odbity trafia do anteny. Bywa, że odbicia sygnałów satelitarnych dają efekty o cały rząd większe niż wszystkie inne błędy pomiaru razem wzięte. 17

18 Błędy wielotorowości Mając doświadczenie w opracowywaniu pomiarów i odpowiednie rozeznanie w wielkości spodziewanych błędów wyznaczania pozycji, można łatwo stwierdzić obciążenie wyników poszczególnych wyznaczeń wpływami odbić sygnałów. 18
19 Błędy wielotorowości Występowanie zjawiska odbić sygnałów można wykryć analizując różne kombinacje obserwacji kodowych (PRN) lub śledząc obliczenia podwójnych obserwacji różnicowych. Inną poszlaką występowania odbić sygnałów satelitarnych jest zbliżony charakter rozkładu błędów pomiarów powtarzających się w różnych sesjach obserwacyjnych. Tak więc, gdy decydujemy się na powtórzenie pomiarów i dostajemy nadal niezadowalające wyniki, ponadto o podobnych rozkładzie błędów systematycznych, to z dużym prawdopodobieństwem możemy to przypisać wpływom odbić sygnałów. Chcąc ograniczyć te wpływy producenci sprzętu pomiarowego GPS stosują specjalne konstrukcje anten o tzw. ostrym obcięciu charakterystyki fazowej. Użytkownicy systemu mogą tylko w jeden sposób zapobiegać wpływom odbić sygnałów satelitarnych poprzez odpowiedni wybór miejsc na posadowienie anten. 19
20 Błędy wielotorowości Odbicia sygnałów z anteny satelitarnej polegają na pewnym sprzężeniu zwrotnym pomiędzy anteną stanowiącą źródło promieniowania i jej obrazem na przeszkodzie terenowej. Na ogół jest to mniej groźne zjawisko niż odbicia sygnałów satelitarnych. W wyjątkowych przypadkach, gdy odbijająca przeszkoda znajduje się blisko anteny, może nastąpić zjawisko rezonansowego wzmocnienia odbitych sygnałów obniżające jakość obserwacji. Jedynym sposobem uniknięcia tych wpływów jest odpowiedni dobór miejsca na posadowienie anteny. 20
 spowodowany jest tym, że sygnał GPS emitowany przez satelitę dociera do odbiornika nie tylko bezpośrednio, najkrótszą drogą, lecz także wieloma pośrednimi drogami wskutek odbić od różnych")
21 Błędy wielotorowości Błąd związany z interferencją fal wtórnych, tzw. wielotorowości (ang. multipath) spowodowany jest tym, że sygnał GPS emitowany przez satelitę dociera do odbiornika nie tylko bezpośrednio, najkrótszą drogą, lecz także wieloma pośrednimi drogami wskutek odbić od różnych obiektów otaczających antenę (np. budowle, powierzchnia ziemi, wody). Ma on znaczny wpływ na wyznaczenie współrzędnych punktu, zwłaszcza gdy obserwowane są satelity znajdujące się nisko nad horyzontem. 21
22 Błędy wielotorowości Punkt odbicia sygnału może być położony poniżej i powyżej centrum fazowego anteny odbiorczej i takie dwa przypadki są rozpatrywane w analizach związanych z wpływem błędu wielotorowości. W przypadku wyznaczania wysokości punktu wielotorowość jest jednym, obok refrakcji troposferycznej, z dominujących źródeł błędów. W zależności od różnicy długości dróg jakie muszą pokonać sygnały odbite, a tym samym od różnicy ich faz, amplituda sygnału wypadkowego może ulec wzmocnieniu lub osłabieniu, a efektem tym obciążone będą zarówno obserwacje pseudoodległości, jak i fazy sygnału GPS. 22
23 Błędy wielotorowości Na podstawie znanej geometrii satelita odbiornik reflektor można stwierdzić, że sygnał odbity będzie przesunięty w fazie o wielkość: Błąd pomiarów fazowych spowodowany wielotorowością: 23
24 Błędy wielotorowości Metody wykrywania i eliminowania błędu wielotorowości są oparte o analizę SNR, na podstawie której wyznaczana jest wartość przesunięcia fazy między sygnałem bezpośrednim i odbitym w fazowych obserwacjach GPS. Do wykrywania błędu pseudoodległości spowodowanego wielotorowością w pomiarach kodowych wykorzystuje się kombinację liniową obserwacji fazowych oraz pseudoodległości na wybranej do wyznaczenia błędu częstotliwości. 24
25 Błędy pozycji stacji obserwacyjnej i stacji nawiązania Błędy pozycji stacji obserwacyjnej i stacji nawiązania są wywołane m.in. czynnikami: pływy skorupy ziemskiej, pływy oceaniczne, pływy atmosferyczne, ruch płyt kontynentalnych, przyjęta realizacja ziemskiego układu odniesienia. W opracowaniach precyzyjnych wpływ tych zjawisk jest redukowany poprzez użycie ich modeli, które udostępniane są przez IERS (modele pływowe). W przypadku ruchu płyt kontynentalnych w opracowaniach obserwacji GPS wykorzystywane są dwa modele: NNR-NUVEL-1A (Nonet-rotation Geophysical Plate Kinematic Model) i APKIM (Actual Plate Kinematic Model). Przyjęcie konkretnej realizacji układu odniesienia w procesie opracowania obserwacji satelitarnych GPS w sieciach lokalnych nawiązanych do stacji permanentnych pozwala na wyznaczanie współrzędnych punktów sieci oraz parametrów kinematyki w tym układzie (np. ziemski układ odniesienia ITRF2000). 25
.")
26 Błędy parametrów ruchu obrotowego Ziemi Błędy parametrów ruchu obrotowego Ziemi są redukowane w procesie opracowania obserwacji GPS poprzez zastosowanie modeli udostępnianych przez Międzynarodową Służbę Ruchu Obrotowego Ziemi (International Earth Rotation and Reference Systems Service: IERS). Parametry ruchu obrotowego Ziemi stanowią dane wejściowe do systemu opracowania obserwacji GPS - IERS Bulletin B: Monthly Earth Orientation Data. 26
27 Błędy opracowania obserwacji GNSS Błędy opracowania obserwacji GPS wynikają z przyjętej metodyki opracowania. Zazwyczaj pliki obserwacyjne z formatu binarnego odbiorników GPS są konwertowane do formatu tekstowego ASCII, niezależnego od sprzętu pomiarowego RINEX (ang. Receiver Independent Exchange), a następnie poddane obróbce w oprogramowaniu komercyjnym lub dostępnym np. na serwerze ASG EUPOS. Na każdym etapie przeliczeń występują np. błędy numeryczne zaokrągleń. W przypadku statycznych pomiarów fazowych istotny wpływ na dokładność ma ilość linii bazowych (wektorów pomiędzy nieruchomymi odbiornikami GPS), spośród których wyselekcjonowane zostaną wektory niezależne (o błędach pomiarowych z najniższą korelacją). 27
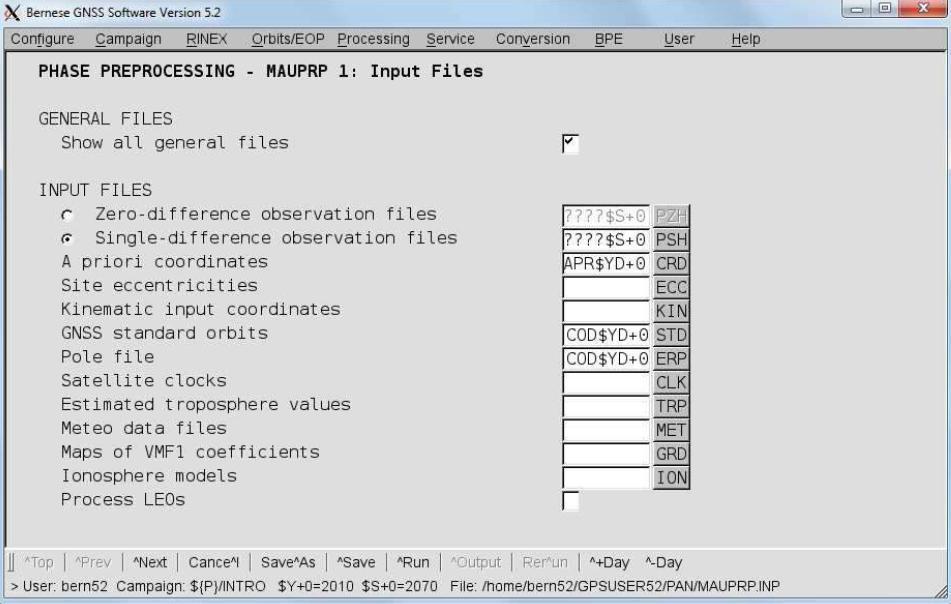
28 Błędy opracowania obserwacji GNSS Przykładowe etapy opracowania obserwacji korzystając z Bernese GPS Software: 1. Konwersja plików IERS/IGS do formatu Bernese EOP (ERP). 2. Wstępne opracowanie obserwacji kodowych z wykorzystaniem modułów CODCHK i CODSPP. Pierwszy z nich ma na celu znalezienie obserwacji odstających, na bazie równań pojedynczych różnic. Moduł CODSPP ma na celu synchronizację zegarów odbiorników z czasem GPS. 3. Zdefiniowanie układu wektorów niezależnych: moduł SNGDIF. W przypadku sieci lokalnych, w których obserwacje były prowadzone jednorodnym sprzętem pomiarowym, jako metodę wyboru niezależnych linii bazowych stosuje się metodę najkrótszych połączeń SHORTEST. 28

29 Błędy opracowania obserwacji GNSS 29

30 Błędy opracowania obserwacji GNSS 30
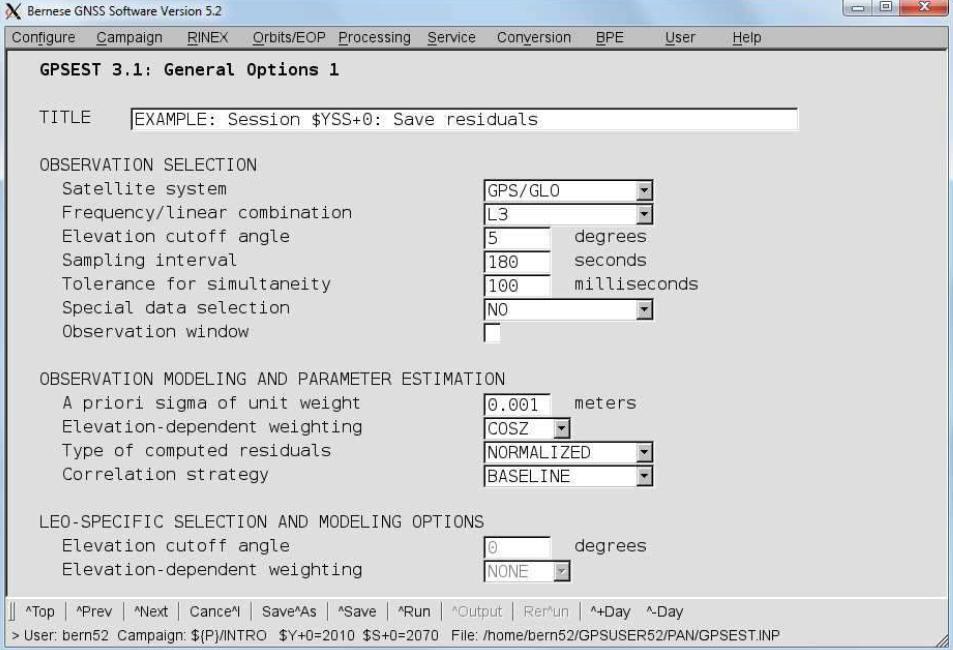
31 Błędy opracowania obserwacji GNSS Przykładowe etapy opracowania obserwacji korzystając z Bernese GPS Software: 3. Niezależne wektory są podstawą do tworzenia równań potrójnych różnic obserwacji fazowych oraz testowania kombinacji liniowych obserwacji fazowych L1 i L2. Na tym etapie opracowania wychwytywane i naprawiane są przeskoki fazy cycle slips oraz następuje zmiana wag obserwacji błędnych, np. ze względu na błąd spowodowany wielotorowością. W przypadku braku możliwości naprawienia tych fragmentów obserwacji, w których nastąpiły przeskoki fazy są one usuwane. Ten etap opracowania realizowany jest w ramach modułu MAUPRP. 4. W module GPSEST wyznaczane są współrzędne przybliżone punktów z dokładnością centymetrową z wykorzystaniem kombinacji liniowej Ionosphere-free fazy L3 równań podwójnych różnic. W ramach tego samego modułu opracowywany zostaje lokalny model jonosfery WUTE L, który jest wykorzystywany do rozwiązania nieoznaczoności oraz lokalny model troposfery. 31
32 32
33 33
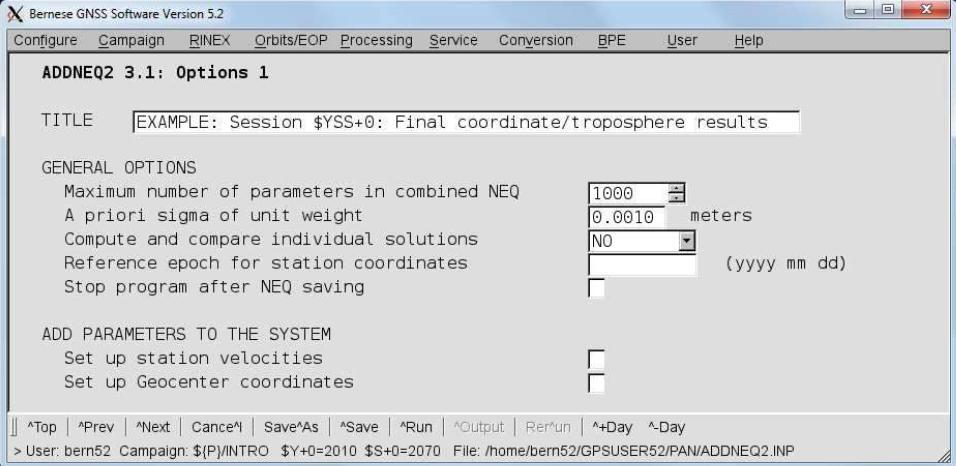
34 Błędy opracowania obserwacji GNSS Przykładowe etapy opracowania obserwacji korzystając z Bernese GPS Software: 5. Końcowy etap opracowania stanowi wyznaczenie współrzędnych punktów sieci wraz z charakterystyką dokładnościową w układzie współrzędnych ITRF2000 dla każdego dnia obserwacyjnego (epoki) kampanii pomiarowej (również w module GPSEST). 6. Rozwiązania z poszczególnych dni pomiarowych w ramach jednej kampanii są następnie łączone modułem ADDNEQ, a wyniki stanowią średnie współrzędne punktów dla okresu kampanii pomiarowej wraz z charakterystyką dokładnościową. 7. Transformacja uzyskanych współrzędnych do innych układów np. ETRF89 z epoką
35 35
36 36
37 Błędy wynikające z celowego ograniczenia precyzji Błędy wynikające z celowego ograniczenia precyzji nakładane przez zarządców (właścicieli) systemów satelitarnych to na przykładzie GPS: (SA Selective Availability) degradacja zegara satelity lub efemeryd satelitów w depeszy satelitarnej, błędy wynikające z celowego wyłączenia niektórych sygnałów np. włączenie systemu zapobiegającego próbom zakłócenia pracy GPS (AS Anti-spoofing), polegający na zastąpieniu kodu P zaszyfrowanym kodem Y, który jest dostępny tylko dla autoryzowanych użytkowników systemu. 37
38 Algorytm rozwiązania układu równań pozycyjnych Schemat ogólny rozwiązania układu równań pozycyjnych GNSS, mający na celu wyznaczenie nieoznaczoności oraz pozostałych parametrów wektora niewiadomych (Joosten and Tiberius : LAMBDA). 38
39 Problem cycle slip Utracone albo zagubione cykle (cycle slip) fazy fali nośnej podczas obserwacji fazowych GPS wpływają niekorzystnie na dokładność wyznaczania pozycji i stwarzają poważny problem podczas opracowywania tych obserwacji. Zjawisko utraconych cykli występuje wtedy, gdy podczas obserwacji, najczęściej sposobami częściowokinematycznym lub kinematycznym, nastąpi przerwa w łączności z satelitą. Dzieje się tak na skutek zasłonięć anteny przez różne przedmioty terenowe: drzewa, budowle itp. Problem utraconych cykli fazowych rzutuje zasadniczo na dobór miejsc, które nadają się do posadowienia anten odbiorników GPS, oraz wybór tras przemieszczania się ruchomego odbiornika W pomiarach kinematycznych. 39
40 Problem cycle slip Problem utraty cykli dotyczy całkowitej liczby cykli fazowych, tej samej dla wszystkich tych satelitów, z którymi utracono łączność. Algorytmy wykrywania utraconych cykli fazowych wykorzystują najczęściej potrójne różnicowe obserwacje fazowe. Są one bowiem kombinacjami liniowymi angażującymi obserwacje tego samego satelity w różnych epokach obserwacyjnych. Stosunkowo łatwo zatem wykryć utracone cykle fazowe tą metodą w obserwacjach statycznych, gdyż trwają one stosunkowo długo. Podwójne różnicowe obserwacje nie mają tej właściwości. Stosując najpierw rozwiązanie wykorzystujące potrójne różnicowe obserwacje fazowe i wprowadzając odpowiednio małe wagi dla obserwacji odstających można wykryć te potrójne obserwacje, które zawierają utracone cykle. Po wprowadzeniu poprawek można przystąpić do rozwiązania opartego na podwójnych obserwacjach różnicowych. Tak wygląda w zarysie ogólna strategia wykrywania utraconych cykli fazowych. 40



41 Problem cycle slip Do wykrywania utraconych cykli fazowych można wykorzystać znane chwilowe częstotliwości dopplerowskie. W metodzie tej wartość fazowa w i-tym momencie jest wyznaczana na podstawie wartości w momencie (i-1) oraz prędkości fazowych tzn.: przy założeniu, że przyśpieszenie fazy jest stałe w przeciągu t. Tak wyznaczoną wartość fazową porównuje się z odebraną i tworząc różnicę: Różnica ta ma być mniejsza od pewnej założonej wartości ułamka fazy, gdy nie wystąpiło zjawisko utraty cykli fazowych. Jej wadą jest jednak mała przydatność w przypadku dużych przyśpieszeń, jakich może doznawać antena GPS transportowana przez samolot. 41
42 Problem cycle slip Inna wersja tej metody nie wymaga uprzedniej znajomości chwilowej częstotliwości dopplerowskiej. Wyznacza się prędkości fazowe na podstawie odebranych faz w różnych momentach. Metoda może być stosowana zarówno dla obserwacji statycznych, jak i kinematycznych. Kolejne metody wykrywania utraconych cykli fazowych i poprawiania obserwacji wykorzystują dyskretny filtr Kalmana w procesie redukcji obserwacji fazowych. 42
, 2005, Vol.")
43 LITERATURA K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice P. Zalewski, Źródła błędów w pomiarach GNSS (na podstawie Bosy J., 2005) [dostęp: ] J. Bosy, Data processing of local GPS networks located in a mountain area, Acta Geodynamica et Geomaterialia (formerly Acta Montana), 2005, Vol. 2, No. 3 (139), pp J. Bosy, Precyzyjne opracowanie obserwacji satelitarnych GPS w lokalnych sieciach położonych w terenach górskich, Zeszyty Naukowe Akademii Rolniczej we Wrocławiu, Nr 522, Rozprawy CCXXXIV, 2005, [dostęp: ] J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn
Źródła błędów w pomiarach GNSS (na podstawie Bosy J., 2005) dr inż. Paweł Zalewski Akademia Morska w Szczecinie
 dr inż. Paweł Zalewski Akademia Morska w Szczecinie") Źródła błędów w pomiarach GNSS (na podstawie Bosy J., 2005) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Źródła błędów w pomiarach GNSS: Błędy wyznaczania pozycji w systemach zaliczanych do GNSS
Źródła błędów w pomiarach GNSS (na podstawie Bosy J., 2005) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Źródła błędów w pomiarach GNSS: Błędy wyznaczania pozycji w systemach zaliczanych do GNSS
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej
 Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej Konferencja Komisji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych PAN Satelitarne
Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej Konferencja Komisji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych PAN Satelitarne
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska
 UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
AKTUALNY STAN REALIZACJI PROJEKTU ASG+
 AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ
 WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE
 WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
POMIARY TŁUMIENIA I ABSORBCJI FAL ELEKTROMAGNETYCZNYCH
 LŁ ELEKTRONIKI WAT POMIARY TŁUMIENIA I ABSORBCJI FAL ELEKTROMAGNETYCZNYCH dr inż. Leszek Nowosielski Wojskowa Akademia Techniczna Wydział Elektroniki Laboratorium Kompatybilności Elektromagnetycznej LŁ
LŁ ELEKTRONIKI WAT POMIARY TŁUMIENIA I ABSORBCJI FAL ELEKTROMAGNETYCZNYCH dr inż. Leszek Nowosielski Wojskowa Akademia Techniczna Wydział Elektroniki Laboratorium Kompatybilności Elektromagnetycznej LŁ
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
WYBRANE ELEMENTY GEOFIZYKI
 WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18
 : Przedmowa...... 11 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ Z historii geodezji... 13 1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18 1.2.
: Przedmowa...... 11 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ Z historii geodezji... 13 1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18 1.2.
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju
 Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Kampania
Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Kampania
SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS
 II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych
 Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Recenzja Rozprawy doktorskiej mgr int Pawła Przestrzelskiego pt.: Sieciowe pozycjonowanie różnicowe z wykorzystaniem obserwacji GPS i GLONASS"
 *jp"
*jp"
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
O technologii pomiarów GPS RTK (Real Time Kinematic)
") 1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
System 1200 Newsletter Nr 54 Sieci RTK - Przykłady studialne
 NEWSLETTERY SIECI RTK - PRZYPOMNIENIE Niniejszy numer Newslettera kończy trzyczęściową serię dotyczącą sieci RTK. Zanim zagłębimy się w szczegóły tego numeru przypomnimy tematy dwóch poprzednich numerów.
NEWSLETTERY SIECI RTK - PRZYPOMNIENIE Niniejszy numer Newslettera kończy trzyczęściową serię dotyczącą sieci RTK. Zanim zagłębimy się w szczegóły tego numeru przypomnimy tematy dwóch poprzednich numerów.
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
R E C E N Z J A. rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality of precise point positioning method
 dr hab. inż. Ryszard Szpnuar Politechnika Warszawska Katedra Geodezji i Astronomii Geodezyjnej R E C E N Z J A rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality
dr hab. inż. Ryszard Szpnuar Politechnika Warszawska Katedra Geodezji i Astronomii Geodezyjnej R E C E N Z J A rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
Korzyści wynikające ze wspólnego opracowania. z wynikami uzyskanymi techniką GNSS
 Korzyści wynikające ze wspólnego opracowania wyników pomiarów PSInSAR z wynikami uzyskanymi techniką GNSS Łukasz Żak, Jan Kryński, Dariusz Ziółkowski, Jan Cisak, Magdalena Łągiewska Instytut Geodezji i
Korzyści wynikające ze wspólnego opracowania wyników pomiarów PSInSAR z wynikami uzyskanymi techniką GNSS Łukasz Żak, Jan Kryński, Dariusz Ziółkowski, Jan Cisak, Magdalena Łągiewska Instytut Geodezji i
OPIS MODUŁ KSZTAŁCENIA (SYLABUS)
") OPIS MODUŁ KSZTAŁCENIA (SYLABUS) I. Informacje ogólne: 1 Nazwa modułu kształcenia Geodezja satelitarna 2 Kod modułu kształcenia 04-ASTR1-GEOD45-3Z 3 Rodzaj modułu kształcenia do wyboru 4 Kierunek studiów
OPIS MODUŁ KSZTAŁCENIA (SYLABUS) I. Informacje ogólne: 1 Nazwa modułu kształcenia Geodezja satelitarna 2 Kod modułu kształcenia 04-ASTR1-GEOD45-3Z 3 Rodzaj modułu kształcenia do wyboru 4 Kierunek studiów
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 9
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 9 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 3 W zależności od celu, jakiemu wyniki pomiarów mają służyć,
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 9 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 3 W zależności od celu, jakiemu wyniki pomiarów mają służyć,
ASG EUPOS w państwowym systemie odniesień przestrzennych
 ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Serwisy postprocessingu POZGEO i POZGEO D
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
ZALECENIA TECHNICZNE
 GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
GEODEZYJNE TECHNIKI SATELITARNE W REALIZACJI UKŁADU ODNIESIENIA
 GEODEZYJNE TECHNIKI SATELITARNE W REALIZACJI UKŁADU ODNIESIENIA Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Systemy i układy odniesienia System odniesienia (reference
GEODEZYJNE TECHNIKI SATELITARNE W REALIZACJI UKŁADU ODNIESIENIA Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Systemy i układy odniesienia System odniesienia (reference
WYTYCZNE TECHNICZNE G-1.12
 GŁÓWNY GEODETA KRAJU WYTYCZNE TECHNICZNE G-1.12 Pomiary satelitarne oparte na systemie precyzyjnego pozycjonowania ASG- EUPOS (Projekt z dnia 1.03.2008 r. z poprawkami) Wytyczne opracował zespół w składzie:
GŁÓWNY GEODETA KRAJU WYTYCZNE TECHNICZNE G-1.12 Pomiary satelitarne oparte na systemie precyzyjnego pozycjonowania ASG- EUPOS (Projekt z dnia 1.03.2008 r. z poprawkami) Wytyczne opracował zespół w składzie:
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Olsztyn, 10-11 października 2013 r.
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Olsztyn, 10-11 października 2013 r.
ASG-EUPOS w pracach geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS w pracach geodezyjnych i kartograficznych Artur Oruba specjalista II Konferencja Użytkowników
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS w pracach geodezyjnych i kartograficznych Artur Oruba specjalista II Konferencja Użytkowników
ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM
 ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM Figurski M., Szafranek K., Araszkiewicz A., Szołucha M. Realizacja grantu
ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM Figurski M., Szafranek K., Araszkiewicz A., Szołucha M. Realizacja grantu
TECHNOLOGIE. Artykuł recenzowany: Kontrola zasobu geodezyjnego z wykorzystaniem systemu ASG-EUPOS na przykładzie powiatu bolesławieckiego
 Artykuł recenzowany: Kontrola zasobu geodezyjnego z wykorzystaniem systemu ASG-EUPOS na przykładzie powiatu bolesławieckiego ASG-EUPOS zdaje egzamin Streszczenie: Testowe uruchomienie z początkiem maja
Artykuł recenzowany: Kontrola zasobu geodezyjnego z wykorzystaniem systemu ASG-EUPOS na przykładzie powiatu bolesławieckiego ASG-EUPOS zdaje egzamin Streszczenie: Testowe uruchomienie z początkiem maja
RADIONAMIARY. zasady, sposoby, kalibracja, błędy i ograniczenia
 RADIONAMIARY zasady, sposoby, kalibracja, błędy i ograniczenia 1 Radionamierzanie jest to: Określenie kąta, zawartego między północną częścią lokalnego południka geograficznego a kierunkiem na dany obiekt,
RADIONAMIARY zasady, sposoby, kalibracja, błędy i ograniczenia 1 Radionamierzanie jest to: Określenie kąta, zawartego między północną częścią lokalnego południka geograficznego a kierunkiem na dany obiekt,
Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju
 Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Centrum Badań Kosmicznych PAN, Warszawa Stanisław
Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Centrum Badań Kosmicznych PAN, Warszawa Stanisław
Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu
 Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu Agnieszka Wnęk 1, Maria Zbylut 1, Wiesław Kosek 1,2 1 Wydział
Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu Agnieszka Wnęk 1, Maria Zbylut 1, Wiesław Kosek 1,2 1 Wydział
Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89
 Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89 Tomasz Liwosz 1, Marcin Ryczywolski 1,2 1 Politechnika Warszawska 2 Główny Urząd Geodezji i Kartografii Seminarium Współczesne problemy podstawowych
Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89 Tomasz Liwosz 1, Marcin Ryczywolski 1,2 1 Politechnika Warszawska 2 Główny Urząd Geodezji i Kartografii Seminarium Współczesne problemy podstawowych
PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE Opracowanie: Ryszard Pażus
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE Opracowanie: Ryszard Pażus
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista
 Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Systemy i Sieci Radiowe
 Systemy i Sieci Radiowe Wykład 4 Media transmisyjne część Program wykładu Widmo sygnałów w. cz. Modele i tryby propagacji Anteny Charakterystyka kanału radiowego zjawiska propagacyjne 1 Transmisja radiowa
Systemy i Sieci Radiowe Wykład 4 Media transmisyjne część Program wykładu Widmo sygnałów w. cz. Modele i tryby propagacji Anteny Charakterystyka kanału radiowego zjawiska propagacyjne 1 Transmisja radiowa
Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS
 Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS Jarosław BOSY Witold ROHM Jan KAPŁON Jan SIERNY Instytut Geodezji i
Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS Jarosław BOSY Witold ROHM Jan KAPŁON Jan SIERNY Instytut Geodezji i
PRZETWARZANIE TRIMBLE HD-GNSS
 PRZETWARZANIE TRIMBLE HD-GNSS BIAŁA KSIĘGA TRIMBLE SURVEY DIVISION WESTMINSTER, COLORADO, USA Wrzesień 2012 STRESZCZENIE Przetwarzanie kodowe GNSS uległo znacznej poprawie w porównaniu z pierwszymi algorytmami
PRZETWARZANIE TRIMBLE HD-GNSS BIAŁA KSIĘGA TRIMBLE SURVEY DIVISION WESTMINSTER, COLORADO, USA Wrzesień 2012 STRESZCZENIE Przetwarzanie kodowe GNSS uległo znacznej poprawie w porównaniu z pierwszymi algorytmami
Aktualne produkty jonosferyczne dla GNSS
 Aktualne produkty jonosferyczne dla GNSS Anna Krypiak-Gregorczyk 1, Paweł Wielgosz 1 Andrzej Borkowski 2 Angela Aragon-Angel 3 Aleksander Nowak 4 1 Uniwersytet Warmińsko-Mazurski w Olsztynie 2 Uniwersytet
Aktualne produkty jonosferyczne dla GNSS Anna Krypiak-Gregorczyk 1, Paweł Wielgosz 1 Andrzej Borkowski 2 Angela Aragon-Angel 3 Aleksander Nowak 4 1 Uniwersytet Warmińsko-Mazurski w Olsztynie 2 Uniwersytet
Widmo fal elektromagnetycznych
 Czym są fale elektromagnetyczne? Widmo fal elektromagnetycznych dr inż. Romuald Kędzierski Podstawowe pojęcia związane z falami - przypomnienie pole falowe część przestrzeni objęta w danej chwili falą
Czym są fale elektromagnetyczne? Widmo fal elektromagnetycznych dr inż. Romuald Kędzierski Podstawowe pojęcia związane z falami - przypomnienie pole falowe część przestrzeni objęta w danej chwili falą
Mobilne pozycjonowanie GNSS z użyciem obserwacji fazowych
 Mobilne pozycjonowanie GNSS z użyciem obserwacji fazowych Jerzy Saczuk 1) 1) Centrum Geomatyki Stosowanej, Wydz. Inż. Lądowej i Geodezji, Wojskowa Akademia Techniczna 1/40 : Badania prowadzone w ramach
Mobilne pozycjonowanie GNSS z użyciem obserwacji fazowych Jerzy Saczuk 1) 1) Centrum Geomatyki Stosowanej, Wydz. Inż. Lądowej i Geodezji, Wojskowa Akademia Techniczna 1/40 : Badania prowadzone w ramach
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
I. Informacje ogólne. Strona 1 z 9
 PRZELICZANIE SZCZEGÓŁOWEJ OSNOWY WYSOKOŚCIOWEJ, POMIAROWEJ OSNOWY WYSOKOŚCIOWEJ ORAZ RZĘDNYCH SZCZEGÓŁÓW SYTUACYJNO- WYSOKOŚCIOWYCH DO PAŃSTWOWEGO UKŁADU WYSOKOŚCIOWEGO PL-EVRF2007-NH I. Informacje ogólne
PRZELICZANIE SZCZEGÓŁOWEJ OSNOWY WYSOKOŚCIOWEJ, POMIAROWEJ OSNOWY WYSOKOŚCIOWEJ ORAZ RZĘDNYCH SZCZEGÓŁÓW SYTUACYJNO- WYSOKOŚCIOWYCH DO PAŃSTWOWEGO UKŁADU WYSOKOŚCIOWEGO PL-EVRF2007-NH I. Informacje ogólne
Lp. Promotor Temat Dyplomant 1. Dr inż. A. Dumalski. Badanie dokładności użytkowej niwelatora cyfrowego 3. Dr inż. A. Dumalski
 2009/2010 propozycje tematów prac dyplomowych na studiach stacjonarnych magisterskich II stopnia realizowanych w Instytucie Geodezji Specjalność geodezja gospodarcza Olsztyn Limit 18 Lp. Promotor Temat
2009/2010 propozycje tematów prac dyplomowych na studiach stacjonarnych magisterskich II stopnia realizowanych w Instytucie Geodezji Specjalność geodezja gospodarcza Olsztyn Limit 18 Lp. Promotor Temat
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK
 Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Efekt Dopplera. dr inż. Romuald Kędzierski
 Efekt Dopplera dr inż. Romuald Kędzierski Christian Andreas Doppler W 1843 roku opublikował swoją najważniejszą pracę O kolorowym świetle gwiazd podwójnych i niektórych innych ciałach niebieskich. Opisał
Efekt Dopplera dr inż. Romuald Kędzierski Christian Andreas Doppler W 1843 roku opublikował swoją najważniejszą pracę O kolorowym świetle gwiazd podwójnych i niektórych innych ciałach niebieskich. Opisał
Załącznik Nr 9 do OPZ
 Załącznik Nr 9 do OPZ PRZELICZANIE SZCZEGÓŁOWEJ OSNOWY WYSOKOŚCIOWEJ, POMIAROWEJ OSNOWY WYSOKOŚCIOWEJ ORAZ RZĘDNYCH SZCZEGÓŁÓW SYTUACYJNO- WYSOKOŚCIOWYCH DO PAŃSTWOWEGO UKŁADU WYSOKOŚCIOWEGO PL- EVRF2007-NH
Załącznik Nr 9 do OPZ PRZELICZANIE SZCZEGÓŁOWEJ OSNOWY WYSOKOŚCIOWEJ, POMIAROWEJ OSNOWY WYSOKOŚCIOWEJ ORAZ RZĘDNYCH SZCZEGÓŁÓW SYTUACYJNO- WYSOKOŚCIOWYCH DO PAŃSTWOWEGO UKŁADU WYSOKOŚCIOWEGO PL- EVRF2007-NH
Ograniczenia GPS. błędy spowodowane zmiennością opóźnień: jonosferycznego i troposferycznego, niedokładności efemeryd, błędy zegara satelity,
 DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS
 Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
SINGLE-IMAGE HIGH-RESOLUTION SATELLITE DATA FOR 3D INFORMATIONEXTRACTION
 SINGLE-IMAGE HIGH-RESOLUTION SATELLITE DATA FOR 3D INFORMATIONEXTRACTION MOŻLIWOŚCI WYDOBYCIA INFORMACJI 3D Z POJEDYNCZYCH WYSOKOROZDZIELCZYCH OBRAZÓW SATELITARNYCH J. Willneff, J. Poon, C. Fraser Przygotował:
SINGLE-IMAGE HIGH-RESOLUTION SATELLITE DATA FOR 3D INFORMATIONEXTRACTION MOŻLIWOŚCI WYDOBYCIA INFORMACJI 3D Z POJEDYNCZYCH WYSOKOROZDZIELCZYCH OBRAZÓW SATELITARNYCH J. Willneff, J. Poon, C. Fraser Przygotował:
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011
 TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH KRÓTKA
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH KRÓTKA
Wyznaczanie prędkości dźwięku w powietrzu
 Imię i Nazwisko... Wyznaczanie prędkości dźwięku w powietrzu Opracowanie: Piotr Wróbel 1. Cel ćwiczenia. Celem ćwiczenia jest wyznaczenie prędkości dźwięku w powietrzu, metodą różnicy czasu przelotu. Drgania
Imię i Nazwisko... Wyznaczanie prędkości dźwięku w powietrzu Opracowanie: Piotr Wróbel 1. Cel ćwiczenia. Celem ćwiczenia jest wyznaczenie prędkości dźwięku w powietrzu, metodą różnicy czasu przelotu. Drgania
Krzysztof Łapsa Wyznaczenie prędkości fal ultradźwiękowych metodami interferencyjnymi
 Krzysztof Łapsa Wyznaczenie prędkości fal ultradźwiękowych metodami interferencyjnymi Cele ćwiczenia Praktyczne zapoznanie się ze zjawiskiem interferencji fal akustycznych Wyznaczenie prędkości fal ultradźwiękowych
Krzysztof Łapsa Wyznaczenie prędkości fal ultradźwiękowych metodami interferencyjnymi Cele ćwiczenia Praktyczne zapoznanie się ze zjawiskiem interferencji fal akustycznych Wyznaczenie prędkości fal ultradźwiękowych
METODY STATYSTYCZNE W BIOLOGII
 METODY STATYSTYCZNE W BIOLOGII 1. Wykład wstępny 2. Populacje i próby danych 3. Testowanie hipotez i estymacja parametrów 4. Planowanie eksperymentów biologicznych 5. Najczęściej wykorzystywane testy statystyczne
METODY STATYSTYCZNE W BIOLOGII 1. Wykład wstępny 2. Populacje i próby danych 3. Testowanie hipotez i estymacja parametrów 4. Planowanie eksperymentów biologicznych 5. Najczęściej wykorzystywane testy statystyczne
Dalmierze elektromagnetyczne
 Dalmierze elektromagnetyczne Dalmierze elektromagnetyczne klasyfikacja i zasada działania Klasyfikacja dalmierzy może być dokonywana przy założeniu rozmaitych kryteriów. Zazwyczaj przyjmuje się dwa. 1.
Dalmierze elektromagnetyczne Dalmierze elektromagnetyczne klasyfikacja i zasada działania Klasyfikacja dalmierzy może być dokonywana przy założeniu rozmaitych kryteriów. Zazwyczaj przyjmuje się dwa. 1.
GPSz2 WYKŁAD 15 SZCZEGÓŁOWA WYSOKOŚCIOWA OSNOWA GEODEZYJNA
 GPSz2 WYKŁAD 15 SZCZEGÓŁOWA WYSOKOŚCIOWA OSNOWA GEODEZYJNA 1 STANDARD TECHNICZNY ZAŁACZNIK NR 1 DO ROZPORZĄDZENIA 2 3 4 5 TO TZW. POŚREDNIE WYMAGANIA DOKŁADNOŚCIOWE 6 Przy niwelacji w druku dziennika pomiaru
GPSz2 WYKŁAD 15 SZCZEGÓŁOWA WYSOKOŚCIOWA OSNOWA GEODEZYJNA 1 STANDARD TECHNICZNY ZAŁACZNIK NR 1 DO ROZPORZĄDZENIA 2 3 4 5 TO TZW. POŚREDNIE WYMAGANIA DOKŁADNOŚCIOWE 6 Przy niwelacji w druku dziennika pomiaru
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
METODY STATYSTYCZNE W BIOLOGII
 METODY STATYSTYCZNE W BIOLOGII 1. Wykład wstępny 2. Populacje i próby danych 3. Testowanie hipotez i estymacja parametrów 4. Planowanie eksperymentów biologicznych 5. Najczęściej wykorzystywane testy statystyczne
METODY STATYSTYCZNE W BIOLOGII 1. Wykład wstępny 2. Populacje i próby danych 3. Testowanie hipotez i estymacja parametrów 4. Planowanie eksperymentów biologicznych 5. Najczęściej wykorzystywane testy statystyczne
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego
 Bi u l e t y n WAT Vo l. LXI, Nr 1, 2012 Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego Katarzyna
Bi u l e t y n WAT Vo l. LXI, Nr 1, 2012 Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego Katarzyna
Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA......
 Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:...... Lp. Parametry wymagane: Parametry
Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:...... Lp. Parametry wymagane: Parametry
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static
 Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych