Mobilne pozycjonowanie GNSS z użyciem obserwacji fazowych
|
|
|
- Mariusz Morawski
- 8 lat temu
- Przeglądów:
Transkrypt
1 Mobilne pozycjonowanie GNSS z użyciem obserwacji fazowych Jerzy Saczuk 1) 1) Centrum Geomatyki Stosowanej, Wydz. Inż. Lądowej i Geodezji, Wojskowa Akademia Techniczna 1/40

2 : Badania prowadzone w ramach projektu badawczego: BUDOWA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG EUPOS Projekt rozwojowy MNiSW nr NR /2010 Zadanie nr 12: Stworzenie serwisu pozycjonowania z wykorzystaniem telefonów komórkowych GSM z modułem GNSS Pozycjonowanie mobilne Pozycjonowanie z wykorzystaniem jednoczęstotliwościowych odbiorników GNSS przystosowanych do współpracy z urządzeniami mobilnymi (smartfony, urządzenia PDA, palmtopy) lub modułów GNSS wbudowanych w smartfony. mrtk technologia RTK bazująca na wyżej wymienionych odbiornikach. 2/40
 lub modułów GNSS wbudowanych w smartfony.")
3 Wbudowane moduły GPS ocena wykorzystania z użyciem standardowych możliwości programowania: Ograniczenia: 1. Dostęp do danych o pozycji [φ, λ, h el (h npm )], za pośrednictwem Location API lub danych w formacie NMEA. 2. Brak dostępu do surowych obserwacji pseudoodległości (i obserwacji fazowych). Opracowany algorytm: 1. Odtworzenie macierzy współczynników (design matrics) na podstawie pozycji odbiornika i pliku efemeryd. 2. Utworzenie wektora wyrazów wolnych na podstawie poprawek referencyjnych (np. KODGIS). 3. Obliczenie poprawionej pozycji (metodą analogiczną do technologii DGPS). 3/40
 na podstawie pozycji odbiornika i pliku efemeryd. 2.")
4 Wbudowane moduły GPS ocena wykorzystania z użyciem standardowych możliwości programowania: Ocena użycia algorytmu: wykazały poprawę pozycji w wyniku użycia algorytmu dla 55% testowych sesji pomiarowych. Skala poprawy była niewielka (30% 40%) i różnorodna dla modułów GNSS pochodzących od różnych producentów. Osiągalna dokładność ~3m. Brak efektu poprawy dla odbiorników stosujących algorytmy filtracji pomiarów. Dla odbiorników, dla których w oprogramowaniu firmowym nie są stosowane algorytmy filtracji (SiRF) skala poprawy pozycji jest porównywalna z efektem zastosowania technologii DGPS (której skuteczność w przypadku odbiorników SiRF, charakteryzujących się niską dokładnością pomiarów kodowych, jest niewielka) Wnioski: Sens praktycznej implementacji metody jest dyskusyjny. Istotną poprawę pozycji można osiągnąć jedynie w drodze wykorzystania pomiarów fazowych. 4/40
 skala poprawy pozycji jest porównywalna z efektem zastosowania technologii DGPS (której skuteczność")
5 Wbudowane moduły GPS: Przykład zastosowania technologii DGPS dla odbiornika SiRF: 5/40

6 : Popularne, tanie odbiorniki jednoczęstotliwościowe, jako jedyne w swojej klasie pozwalające na pracę w trybie binarnym umożliwiającym dostęp do surowych danych obserwacyjnych (pseudoodległości, obserwacje dopplerowskie, obserwacje fazowe (niedostępne wprost w SiRF III). Przeznaczone do współpracy z urządzeniami mobilnymi komputery przenośne, telefony komórkowe. Odbiorniki oferowane w postaci: 1. Anten łączonych z konsolą za pomocą łącza USB, PS2, RS 232 (GPS mouse) np. Globsat BU 353 S4 (SiRF Star IV GSD4e). 2. Anten z połączeniem bezprzewodowym Bluetooth (Bluetooth GPS) np. Nokia LD 3W, LD 4W, Motorola T805 (SiRF Star III), RoyalTek RBT 1000 (SiRF Star II). 3. Modułów wbudowanych w urządzenia typu komputer kieszonkowy (PDA, palmtop), np. Eten M800 (SiRF Star III), smartfon np. Samsung Glaxy SII (SiRF Star IV GSD4t ). 6/40
, RoyalTek RBT 1000 (SiRF Star II). 3. Modułów wbudowanych w urządzenia typu komputer kieszonkowy (PDA, palmtop), np.")
7 : 7/40

8 ilustracja dokładności i precyzji obserwacji kodowych: SiRF II SiRF III 8/40

9 dane w formacie binarnym 1 epoka zawierająca 8 komunikatów MID 28 (obserwacje) i 1 MID 07 (czas): To samo w formie tekstowej: Komunikat MID 28 dla SiRF II i SiRF III 9/40

10 mrtk -badania Technologia mrtk problemy do rozwiązania 1. Dekodowanie danych binarnych (np. konwersja do formatu RINEX) z odzyskaniem informacji o obserwacjach fazowych (Carier Phase) na podstawie odbieranej częstotliwości (Carier Frequency). 2. Opracowanie technologii opracowania pomiarów uwzględniającej specyfikę odbiorników jednofazowych cechujących się niską dokładnością pomiarów kodowych. a. Przyspieszenie procesu dostrojenia filtru Kalmana. b. Opracowanie algorytmu polepszającego efektywność pozycjonowania w trybie kinematycznym. c. Automatyczne rozpoznanie ruchu odbiornika, przełączanie pomiędzy trybem statycznym i kinematycznym. 3. Opracowanie technologii transferu precyzyjnej pozycji do dowolnych aplikacji mobilnych. Ad 1: Aplikacja Sirf2rinex Ad 2: Opracowana technologia mobilnego RTK i aplikacja mrtk. Ad 3: W systemie Android wykorzystanie API Pozorowane położenie (Mock locations). 10/40

11 Technologia mrtk dekodowanie danych binarnych Został opracowany algorytm obliczania przyrostu fazy na podstawie rejestrowanej częstotliwości nośnej (Carire Frequency). Algorytm został zaimplementowany w programie Sirf2rinex. Stworzono możliwość opracowania pomiarów z użyciem dostępnego oprogramowania (np. rtklib ). Sposób obliczania obserwacji fazowych generuje błąd początkowej wartości fazy (0.20 m), co przenosi się na podobnego rzędu błąd wyznaczanej pozycji. Ten problem oraz potencjał mrtk w trybie kinematycznym Ilustruje wykres. 11/40

12 mrtk badania Technologia mrtk problem inicjalizacji procesu Znany jest problem inicjalizacji procesu wyznaczania pozycji w technologii RTK dla odbiorników jednoczęstotliwościowych. Rozwiązania o zadawalającej dokładności osiąga się po około min od momentu rozpoczęcia pomiarów. W przypadku obserwacji statycznych można ten czas zredukować o połowę stosując kombinowany (w przód i wstecz) proces przetwarzania danych. Z punktu widzenia prowadzenia pomiarów w czasie rzeczywistym problem ten wymaga rozwiązania. W tym celu została opracowana metoda polegająca na inicjalizacji pomiarów na punkcie o znanych współrzędnych. 12/40

13 mrtk badania mrtk tryb kinematyczny przesunięcie z przyrostu fazy Przyrost fazy można traktować jako dodatkowy rodzaj obserwacji pozwalający na precyzyjne (błąd rzędu 1cm) wyznaczenie zmiany położenia odbiornika pomiędzy kolejnymi epokami. Użycie tych obserwacji prowadzi do podobnego efektu, jak wyznaczenie szybkości z obserwacji Dopplerowskich (mniejsza dokładność 10cm). Jednak błędy tych obserwacji nie mają cech białego szumu, co prowadzi do ich kumulacji w kolejnych epokach. Efekt ten można zniwelować, stosując filtr Kalmana lub np. metodę Position Dimain Hatch Filter. 13/40

14 mrtk Algorytm Cechy algorytmu: Metoda RTK pozycjonowanie relatywne w oparciu o pomiary fazowe. Dane stacji referencyjnej z systemu ASG EUPOS (Rtcm3/nTrip). Procedura szybkiej inicjalizacji procesu (1 lub kilka sekund). Detekcja ruchu odbiornika. Automatyczny wybór trybu (statyczny/kinematyczny) Praca w trybie kinematycznym nie pogarszająca dokładności rozwiązania. 14/40
 Praca w trybie kinematycznym nie")
15 mrtk Charakterystyka użytej metody Filtr Kalmana. Procedury ujednolicone dla trybów statycznego i kinematycznego (niezmienna forma wektora stanu i macierzy kowariancji). Etap predykcji realizowany jedynie w trybie kinematycznym. Predykcja realizowana w oparciu o wektor przesunięcia wyznaczany z przyrostów fazy i kontrolnie szybkości wyliczanej z obserwacji Dopplerowskich (jednocześnie detekcja ruchu). Zastosowana dodatkowa korekcja macierzy kowariancyjnej (macierz kowariancyjna zakłóceń systemu), niwelująca wpływ kolorowego szumu błędów przyrostu fazy. Etap korekcji wykonywany identycznie, niezależnie od trybu statycznego/kinematycznego. Równania obserwacyjne formułowane z użyciem techniki podwójnego różnicowania: eliminacja błędów atmosfery, zegarów satelitów, zegara odbiornika (szczególnie istotne z uwagi na dużą niestabilność zegara w odbiornikach SiRF). Rozpoznawanie przeskoków fazy na podstawie sygnalizacji odbiornika. Możliwość użycia zestawu satelitów użytych przez odbiornik (detekcja obserwacji obarczonych błędem wielodrożności SiRFIV). 15/40
, niwelująca wpływ kolorowego szumu błędów przyrostu fazy.")
16 mrtk wzory Predykcja: Etap realizowany, gdy ˆ Δx = [ ΔX ΔY ΔZ 0 L 0] T 1 x P k = xˆ + k k + 1 = Pk + xˆ, ˆ P, Q k x k k P k k +1 k + Δx Q k + 1 k Δx > V min Korekcja: T K ( ˆ )( ( ˆ ) ( ˆ k = Pk H xk H xk Pk H xk ) + Rk ) xˆ xˆ + K ( y h( xˆ )) k k = k k k k = ( I K k H ( xˆ k Pk P )) yk h(x) H (x) R k wektor stanu a prori, a posteriori macierz kowariancyjna stanu a prori, a posteriori macierz kowariancyjna zakłóceń systemu 1 wektor wartości pomierzonych wektor pomiarowy modelu macierz pochodnych cząstkowych macierz kowariancyjna błędów pomiaru wektor przesunięcia 16/40

17 Zostały opracowane moduły oprogramowania prototypowego, służącego zarazem do prowadzenia testów i dostrojenia technologii. jest gotowe do użytku i pozwala na realizację pomiarów i gromadzenie danych z wykorzystaniem urządzeń mobilnych oraz opracowanie wyników w trybie post processingu. Technologia jest gotowa do wdrożenia i implementacji na urządzenia mobilne, z przeznaczeniem do realizacji pomiarów lub precyzyjnej nawigacji w trybie czasu rzeczywistego. Funkcje programowe, opracowane w języku ANSI C++, w przypadku programów na komputer stacjonarny, lub Java ME w przypadku programów przeznaczonych na urządzenia mobilne, wymagają transferu do języka Dalvik Java, w celu opracowania oprogramowania przeznaczonego dla systemu Android. Zadanie jest ułatwione z uwagi na syntaktyczną zbieżność tych języków. Wobec dominującej popularności tego systemu na urządzeniach mobilnych i smartfonach, jego uniwersalności, otwartości i dostępności wymaganych rozwiązań technologicznych, optymalnym jest wybór systemu Android jako platformy działania systemu mrtk. 17/40

18 Moduły oprogramowania prototypowego na urządzenia mobilne (Java ME): Rtcm21 transfer danych w standardzie ntrip i dekodowanie danych Rtcm31 formatu rtcm. UniGPS rejestracja danych pomiarowych z odbiornika SiRF, sterowanie trybem pracy odbiornika, itp. 18/40

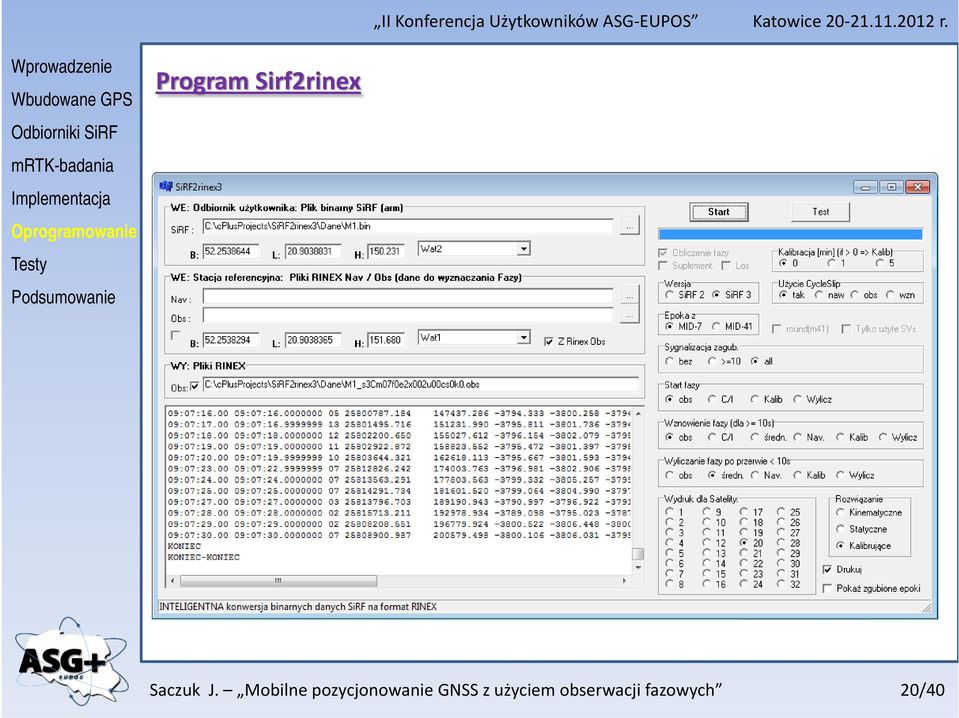
19 mrtk badania Moduły oprogramowania prototypowego na komputery PC (ANSI C++): Sirf2rinex dekodowanie danych binarnych formatu SiRF z zapisem do formatu RINEX. mrtk opracowanie wyników pomiarów GPS wykonanych fazowym odbiornikiem jednoczęstotliwościowym w trybie post processingu. 19/40

20 Program Sirf2rinex 20/40
21 Program mrtk 21/40
22 Wykonanych zostało kilkadziesiąt godzin pomiarów testowych różnymi odbiornikami (zaprezentowanymi w galerii). Na podstawie zgromadzonych danych zidentyfikowano różnego rodzaju problemy związane z niestabilnością pracy odbiorników, błędami transferu danych, itp. Pozwoliło to na opracowanie algorytmów odpornych na błędy lub minimalizujących skutek ich występowania. Pomiary prowadzone były w większości w optymalnych warunkach, zabezpieczających przed narażeniem na skażenie błędami wielodrożności (punkty na dachu budynku Wydziału), na punktach o znanych współrzędnych (pomiary statyczne). Jeden z punktów testowych zlokalizowany był na terenie osiedla z wysoką zabudową. Dla sprawdzenia działania algorytmów dla pomiarów w trybie kinematycznym, zasymulowano te pomiary wykonując kilka serii pomiarów statycznych rozdzielonych przeniesieniem pracującego odbiornika na dystansie kilkudziesięciu metrów i ponowne ustawienie go na tym samym punkcie. 22/40
23 23/40
24 : Powtarzalność wyznaczeń RoyalTek RBT 1000 (SiRF II), Motorola T805, Noka LD 3W, LD 4W (SiRF III) 24/40
25 : Powtarzalność wyznaczeń Noka LD 3W, Eten M800 (SiRF III) 25/40
26 : Indywidualne cechy odbiorników SiRF Motorola T805 (SiRF III) Moto1 / Moto2 26/40
27 : Wyliczanie obserwacji fazowych z częstotliwości nośnej RoyalTek RBT 1000 (SiRF II) Dostarczane / Generowane z Dopplera 27/40
28 : Czas inicjalizacji procesu Inicjalizacja na punkcie o znanych współrzędnych 1s 28/40
29 : Czas inicjalizacji procesu Inicjalizacja na punkcie o 1s / 1m 29/40
30 : Zagubione epoki wszystkie dostępne / brak epok: 6:20:00, 6:25:01 6:25:05 30/40
31 : Wiek poprawek wszystkie dostępne / brak poprawek: 6:20:00 6:22:00 = 2 min 31/40
32 : Wiek poprawek wszystkie dostępne / poprawki co 5s 32/40
33 : Problem całkowitych nieoznaczoności fazowych (fix/float) 33/40
34 : Tryb kinematyczny mrtk / rtklib 34/40
35 : Problem zakłóceń sygnału mrtk / rtklib (CS > 2ep + 2ep) 35/40
36 mrtk Metoda mrtk została zaprojektowana do realizacji precyzyjnego pozycjonowania GNSS z wykorzystaniem jednoczęstotliwościowych odbiorników fazowych SiRF współpracujących z urządzeniami mobilnymi. W metodzie założono wykorzystywanie poprawek referencyjnych systemu ASG EUPOS. Oferuje dokładność rzędu 1dcm w trybie statycznym i kinematycznym. Osiągnięcie zakładanej dokładności warunkowane jest czasem inicjacji procesu, wynoszącym do 30 minut. W trybie stacjonarnym czas inicjacji można skrócić o 50% wykorzystując kombinowany algorytm opracowania danych (forward+backward). Istnieje możliwość wykonywania pomiarów metodą poligonizacji GNSS, prowadząc pomiar w trybie kinematycznym, lub metodą stop and go, wychodzą z punktu o znanych współrzędnych, minimalizując do 1 lub kilku epok cza inicjalizacji. Technologia zapewnia automatyczną detekcję ruchu i przełączenie trybu (statyczny/kinematyczny) opracowania danych pomiarowych. Prace badawcze zostały ukończone. Technologia jest gotowa do wdrożenia. Możliwe są dalsze udoskonalenia w przyszłości. 36/40
37 oprogramowanie prototypowe i wdrożenie Opracowane oprogramowanie prototypowe pozwala obecnie na pozyskiwanie danych pomiarowych z wykorzystaniem urządzeń mobilnych (telefony komórkowe, smartfony) oraz opracowanie wyników w trybie postprocessingu. Przewiduje się wdrożenie technologii na urządzenia mobilne z systemem Android celem umożliwienia precyzyjnego pozycjonowania realizowanego w czasie rzeczywistym. Możliwym będzie zasilanie precyzyjną pozycją wyznaczoną w technologii mrtk dowolnych aplikacji klasy LBS (Location Based Services). 37/40
38 ograniczenia W wyniku badań testowych stwierdzono negatywny wpływ na wyniki pomiarów fazowych (przeskok fazy cycle slip) odziaływania otoczenia: np. użycie odbiornika we wnętrzu auta, uchwycenie odbiornika dłonią w celu jego przeniesienia na kolejny punkt, itp. Efektem może być istotny poziom utraty dokładności pozycjonowania. W celu zapewnienia wysokiej (decymetrowej) dokładności pomiarów rekomenduje się użycie zewnętrznych anten (bluetooth, USB), umieszczonych w sposób eliminujących wpływ oddziaływania otoczenia i ciała obserwatora: np. umieszczenie anteny na dachu auta, prowadzenie pomiarów z anteną umieszczoną na tyczce, ponad głową obserwatora. Wykorzystanie odbiorników wbudowanych, przy jednoczesnym wykorzystywaniu smartfonu jako konsoli sterującej, wydaje się problematyczne (wyjątek: nawigacja samochodowa w kabriolecie). 38/40
39 potencjalne obszary zastosowań Precyzja ( m): Mobilna kartografia (mobile mapping) Sterowanie maszynami (machine controll), np. w budownictwie drogowym, zautomatyzowanym rolnictwie Rolnictwo (precyzyjne nawożenie, monitoring wydajności) Leśnictwo Usługi komunalne Inteligentne systemy transportowe Projekty w obszarze inżynierii lądowej i wodnej Automatyczne, ciągłe monitorowanie obsunięć ziemi, lawin, poziomu rzek Monitorowanie deformacji budowli Sterowanie modelami latającymi Żeglarstwo Geocaching 39/40
40 DZIĘKUJĘ Z UWAGĘ BUDOWA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG EUPOS Projekt rozwojowy MNiSW nr NR / /40
ZAŁOŻENIA I STAN REALIZACJI PRAC W ZAKRESIE OPRACOWANIA SERWISU POZYCJONOWANIA Z WYKORZYSTANIEM TELEFONÓW GSM Z MODUŁEM GNSS
 Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 2 ZAŁOŻIA I STA RALIZACJI PRAC W ZAKRSI OPRACOWAIA SRWISU POZYCJOOWAIA Z WYKORZYSTAIM TLFOÓW GSM Z MODUŁM GSS Saczuk
Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 2 ZAŁOŻIA I STA RALIZACJI PRAC W ZAKRSI OPRACOWAIA SRWISU POZYCJOOWAIA Z WYKORZYSTAIM TLFOÓW GSM Z MODUŁM GSS Saczuk
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
AKTUALNY STAN REALIZACJI PROJEKTU ASG+
 AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
Katedra Geodezji Satelitarnej i Nawigacji. Geodezja i geoinformatyka
 Załącznik nr 8 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Adam
Załącznik nr 8 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Adam
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław Oszczak
Załącznik nr 7 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław Oszczak
POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista
 Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
O technologii pomiarów GPS RTK (Real Time Kinematic)
") 1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
Algorytm SiRF dekoder i jego wykorzystanie w systemie ASG-EUPOS
 Katedra Geodezji Satelitarnej i Nawigacji Bartłomiej Oszczak, Krzysztof Serżysko Uniwersytet Warmińsko-Mazurski w Olsztynie Algorytm SiRF dekoder i jego wykorzystanie w systemie ASG-EUPOS SiRF Technology
Katedra Geodezji Satelitarnej i Nawigacji Bartłomiej Oszczak, Krzysztof Serżysko Uniwersytet Warmińsko-Mazurski w Olsztynie Algorytm SiRF dekoder i jego wykorzystanie w systemie ASG-EUPOS SiRF Technology
Prezentacja najnowszych odbiorników GNSS Spectra Precision (Ashtech) i oprogramowania DigiTerra Explorer oferowanych przez firmę SmallGIS
 i oprogramowania DigiTerra Explorer oferowanych przez firmę SmallGIS") Prezentacja najnowszych odbiorników GNSS Spectra Precision (Ashtech) i oprogramowania DigiTerra Explorer oferowanych przez firmę SmallGIS Bartosz Smaczny Specjalista GNSS SmallGIS Sp. z o.o. Plan prezentacji
Prezentacja najnowszych odbiorników GNSS Spectra Precision (Ashtech) i oprogramowania DigiTerra Explorer oferowanych przez firmę SmallGIS Bartosz Smaczny Specjalista GNSS SmallGIS Sp. z o.o. Plan prezentacji
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK
 Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
ASG-EUPOS w pracach geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS w pracach geodezyjnych i kartograficznych Artur Oruba specjalista II Konferencja Użytkowników
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS w pracach geodezyjnych i kartograficznych Artur Oruba specjalista II Konferencja Użytkowników
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA......
 Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:...... Lp. Parametry wymagane: Parametry
Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:...... Lp. Parametry wymagane: Parametry
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i
 Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i monitoringowych. GEOTRONICS POLSKA Sp. z o.o. Jedyny dystrybutor
Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i monitoringowych. GEOTRONICS POLSKA Sp. z o.o. Jedyny dystrybutor
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011
 TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH KRÓTKA
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH KRÓTKA
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12
 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław 1. Wyznaczenie dokładności
STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław 1. Wyznaczenie dokładności
Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Pomiary GPS RTK (Real Time Kinematic)
") Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
WYJAŚNIENIE TREŚCI SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA
 2 REGIONALNA BAZA LOGISTYCZNA 04-470 Warszawa, ul. Marsa 110 RBL - 5 Warszawa, dnia 25.08.2017 r. WYJAŚNIENIE TREŚCI SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA Na podstawie art. 38 ust. 1 ustawy z dnia
2 REGIONALNA BAZA LOGISTYCZNA 04-470 Warszawa, ul. Marsa 110 RBL - 5 Warszawa, dnia 25.08.2017 r. WYJAŚNIENIE TREŚCI SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA Na podstawie art. 38 ust. 1 ustawy z dnia
1.1 Wprowadzenie. 1.2 Cechy produktu
 INSTRUKCJA OBSŁUGI ODBIORNIKA GPS GR-213 1.1 Wprowadzenie Kompaktowy odbiornik GPS na magistrali USB do podłączenia do notebooka lub PC. Odbiornik ustala pozycję w oparciu o informację z 20 satelitów,
INSTRUKCJA OBSŁUGI ODBIORNIKA GPS GR-213 1.1 Wprowadzenie Kompaktowy odbiornik GPS na magistrali USB do podłączenia do notebooka lub PC. Odbiornik ustala pozycję w oparciu o informację z 20 satelitów,
Katedra Geodezji Satelitarnej i Nawigacji
 Załącznik nr 7.1 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Dr hab.
Załącznik nr 7.1 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Dr hab.
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
Zamieszczanie ogłoszenia: obowiązkowe. Ogłoszenie dotyczy: zamówienia publicznego. SEKCJA I: ZAMAWIAJĄCY
 Ostrów Wielkopolski: Przetarg nieograniczony na dostawę fabrycznie nowego geodezyjnego odbiornika GNSS wraz z akcesoriami i oprogramowaniem oraz szkoleniem pracowników Starostwa Powiatowego w Ostrowie
Ostrów Wielkopolski: Przetarg nieograniczony na dostawę fabrycznie nowego geodezyjnego odbiornika GNSS wraz z akcesoriami i oprogramowaniem oraz szkoleniem pracowników Starostwa Powiatowego w Ostrowie
Postępowanie nr 10/8.5.1/RPOWŚ/RR
 Załącznik nr 1 CHARAKTERYSTYKA PRZEDMIOTU ZAMÓWIENIA 1 Przedmiot usługi: Zakup wyposażenia pracowni geodezyjno-kartograficznej w ramach projektu Kształcimy specjalistów rozwój edukacji zawodowej dla Starachowic
Załącznik nr 1 CHARAKTERYSTYKA PRZEDMIOTU ZAMÓWIENIA 1 Przedmiot usługi: Zakup wyposażenia pracowni geodezyjno-kartograficznej w ramach projektu Kształcimy specjalistów rozwój edukacji zawodowej dla Starachowic
Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
Nazwa specjalności: geodezja i nawigacja satelitarna (STDS)
") TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2013/2014 Pełna nazwa jednostki: Katedra Geodezji Satelitarnej i Nawigacji Promotor Nazwa specjalności: geodezja
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2013/2014 Pełna nazwa jednostki: Katedra Geodezji Satelitarnej i Nawigacji Promotor Nazwa specjalności: geodezja
Serwisy postprocessingu POZGEO i POZGEO D
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim
 Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim Paweł Tabęcki Biuro Geodety Województwa Mazowieckiego Dział Katastralnej Bazy Danych sierpień 2006 Plan prezentacji
Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim Paweł Tabęcki Biuro Geodety Województwa Mazowieckiego Dział Katastralnej Bazy Danych sierpień 2006 Plan prezentacji
+/- 1,5 cm PLM CONNECT RTK. Sygnał korekcyjny z największą dokładnością w Europie.
 PLM CONNECT RTK Sygnał korekcyjny z największą dokładnością w Europie www.newholland.com +/- 1,5 cm PLM Connect RTK Uzyskaj natychmiastowy dostęp do najlepszej sieci Szybkie i niezawodne połączenie. Dzięki
PLM CONNECT RTK Sygnał korekcyjny z największą dokładnością w Europie www.newholland.com +/- 1,5 cm PLM Connect RTK Uzyskaj natychmiastowy dostęp do najlepszej sieci Szybkie i niezawodne połączenie. Dzięki
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS)
") Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska
 UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Ocena wykorzystania algorytmów interpolacyjnych do redukcji ilości danych pozyskiwanych w sposób
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Ocena wykorzystania algorytmów interpolacyjnych do redukcji ilości danych pozyskiwanych w sposób
Załącznik nr 1 do SIWZ. Opis przedmiotu zamówienia
 Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android
 Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android Wykonanie: Łukasz Tomaszowicz Promotor: dr inż. Jacek Kołodziej Cel pracy dyplomowej Celem pracy
Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android Wykonanie: Łukasz Tomaszowicz Promotor: dr inż. Jacek Kołodziej Cel pracy dyplomowej Celem pracy
Recenzja Rozprawy doktorskiej mgr int Pawła Przestrzelskiego pt.: Sieciowe pozycjonowanie różnicowe z wykorzystaniem obserwacji GPS i GLONASS"
 *jp"
*jp"
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE Opracowanie: Ryszard Pażus
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE Opracowanie: Ryszard Pażus
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ
 WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0
 INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0 ver. 30.01.2014 Spis treści I. Wstęp... 2 II. Transmisja danych... 3 III. Aktualizacja oprogramowania... 4 IV. Ustawienia parametrów... 4 V. Konfiguracja modemu radiowego....
INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0 ver. 30.01.2014 Spis treści I. Wstęp... 2 II. Transmisja danych... 3 III. Aktualizacja oprogramowania... 4 IV. Ustawienia parametrów... 4 V. Konfiguracja modemu radiowego....
Nazwa specjalności:geodezja gospodarcza, geodezja i technologie infprmatyczne, kataster nieruchomości, geodezja i nawigacja satelitarna
 TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2013/2014 Pełna nazwa jednostki: INSTYTUT GEODEZJI Nazwa specjalności:geodezja gospodarcza, geodezja i technologie
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2013/2014 Pełna nazwa jednostki: INSTYTUT GEODEZJI Nazwa specjalności:geodezja gospodarcza, geodezja i technologie
Kompaktowy miernik mocy KEW 6305
 Kompaktowy miernik mocy KEW 6305 Wstęp KEW 6305 japońskiej firmy Kyoritsu, to nowy przenośny miernik mocy. Przeznaczony do pomiarów, monitorowania rozdzielni i urządzeń energetycznych. Pozwala na uzyskanie
Kompaktowy miernik mocy KEW 6305 Wstęp KEW 6305 japońskiej firmy Kyoritsu, to nowy przenośny miernik mocy. Przeznaczony do pomiarów, monitorowania rozdzielni i urządzeń energetycznych. Pozwala na uzyskanie
ZALECENIA TECHNICZNE
 GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS
 II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
R E C E N Z J A. rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality of precise point positioning method
 dr hab. inż. Ryszard Szpnuar Politechnika Warszawska Katedra Geodezji i Astronomii Geodezyjnej R E C E N Z J A rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality
dr hab. inż. Ryszard Szpnuar Politechnika Warszawska Katedra Geodezji i Astronomii Geodezyjnej R E C E N Z J A rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS TYTUŁ WYKŁADU Wykorzystanie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS TYTUŁ WYKŁADU Wykorzystanie
ASG-EUPOS serwisy postprocessingu
 Satelitarne Techniki Pomiarowe ASG-EUPOS serwisy postprocessingu System ASG-EUPOS System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny
Satelitarne Techniki Pomiarowe ASG-EUPOS serwisy postprocessingu System ASG-EUPOS System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych
 Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
WYTYCZNE TECHNICZNE G-1.12
 GŁÓWNY GEODETA KRAJU WYTYCZNE TECHNICZNE G-1.12 Pomiary satelitarne oparte na systemie precyzyjnego pozycjonowania ASG- EUPOS (Projekt z dnia 1.03.2008 r. z poprawkami) Wytyczne opracował zespół w składzie:
GŁÓWNY GEODETA KRAJU WYTYCZNE TECHNICZNE G-1.12 Pomiary satelitarne oparte na systemie precyzyjnego pozycjonowania ASG- EUPOS (Projekt z dnia 1.03.2008 r. z poprawkami) Wytyczne opracował zespół w składzie:
System 1200 Newsletter Nr 54 Sieci RTK - Przykłady studialne
 NEWSLETTERY SIECI RTK - PRZYPOMNIENIE Niniejszy numer Newslettera kończy trzyczęściową serię dotyczącą sieci RTK. Zanim zagłębimy się w szczegóły tego numeru przypomnimy tematy dwóch poprzednich numerów.
NEWSLETTERY SIECI RTK - PRZYPOMNIENIE Niniejszy numer Newslettera kończy trzyczęściową serię dotyczącą sieci RTK. Zanim zagłębimy się w szczegóły tego numeru przypomnimy tematy dwóch poprzednich numerów.
TECHNOLOGIE. Artykuł recenzowany: Kontrola zasobu geodezyjnego z wykorzystaniem systemu ASG-EUPOS na przykładzie powiatu bolesławieckiego
 Artykuł recenzowany: Kontrola zasobu geodezyjnego z wykorzystaniem systemu ASG-EUPOS na przykładzie powiatu bolesławieckiego ASG-EUPOS zdaje egzamin Streszczenie: Testowe uruchomienie z początkiem maja
Artykuł recenzowany: Kontrola zasobu geodezyjnego z wykorzystaniem systemu ASG-EUPOS na przykładzie powiatu bolesławieckiego ASG-EUPOS zdaje egzamin Streszczenie: Testowe uruchomienie z początkiem maja
Temat pracy dyplomowej Promotor Dyplomant CENTRUM INŻYNIERII RUCHU MORSKIEGO. prof. dr hab. inż. kpt.ż.w. Stanisław Gucma.
 kierunek: Nawigacja, : Transport morski, w roku akademickim 2012/2013, Temat dyplomowej Promotor Dyplomant otrzymania 1. Nawigacja / TM 2. Nawigacja / TM dokładności pozycji statku określonej przy wykorzystaniu
kierunek: Nawigacja, : Transport morski, w roku akademickim 2012/2013, Temat dyplomowej Promotor Dyplomant otrzymania 1. Nawigacja / TM 2. Nawigacja / TM dokładności pozycji statku określonej przy wykorzystaniu
XVII Wyprawa Bari studentów z KNG Dahlta z Akademii Górniczo Hutniczej w Krakowie im. S. Staszica w Krakowie Testy odbiornika Spectra Precision SP60
 XVII Wyprawa Bari studentów z KNG Dahlta z Akademii Górniczo Hutniczej w Krakowie im. S. Staszica w Krakowie Testy odbiornika Spectra Precision SP60 Inwentaryzacja archeologiczno-geodezyjna dwóch stanowisk
XVII Wyprawa Bari studentów z KNG Dahlta z Akademii Górniczo Hutniczej w Krakowie im. S. Staszica w Krakowie Testy odbiornika Spectra Precision SP60 Inwentaryzacja archeologiczno-geodezyjna dwóch stanowisk
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
KOMPONENTY INERCJALNE
 KATALOG 2016/2017 KOMPONENTY INERCJALNE rozwiązania firmy NovAtel (Kanada) GPS.PL ul. Jasnogórska 23 31-358 Kraków tel. (012) 637 71 49 fax (012) 376 77 27 www.gps.pl C e n t r u m T e c h n i k L o k
KATALOG 2016/2017 KOMPONENTY INERCJALNE rozwiązania firmy NovAtel (Kanada) GPS.PL ul. Jasnogórska 23 31-358 Kraków tel. (012) 637 71 49 fax (012) 376 77 27 www.gps.pl C e n t r u m T e c h n i k L o k
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
FastStatic czyli jak wykonać pomiar statyczny
 FastStatic czyli jak wykonać pomiar statyczny POMIAR W TERENIE Aby wykonać pomiar statyczny nie ma potrzeby uprzedniego nawiązywania połączenia internetowego, ani rozpoczynania procedury podłączenia do
FastStatic czyli jak wykonać pomiar statyczny POMIAR W TERENIE Aby wykonać pomiar statyczny nie ma potrzeby uprzedniego nawiązywania połączenia internetowego, ani rozpoczynania procedury podłączenia do
Lp. Promotor Temat Dyplomant 1. Dr inż. A. Dumalski. Badanie dokładności użytkowej niwelatora cyfrowego 3. Dr inż. A. Dumalski
 2009/2010 propozycje tematów prac dyplomowych na studiach stacjonarnych magisterskich II stopnia realizowanych w Instytucie Geodezji Specjalność geodezja gospodarcza Olsztyn Limit 18 Lp. Promotor Temat
2009/2010 propozycje tematów prac dyplomowych na studiach stacjonarnych magisterskich II stopnia realizowanych w Instytucie Geodezji Specjalność geodezja gospodarcza Olsztyn Limit 18 Lp. Promotor Temat
Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS
 Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS Jarosław BOSY Witold ROHM Jan KAPŁON Jan SIERNY Instytut Geodezji i
Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS Jarosław BOSY Witold ROHM Jan KAPŁON Jan SIERNY Instytut Geodezji i
Koncepcja zintegrowanego monitoringu strukturalnego na przykładzie systemu kontrolnopomiarowego
 Koncepcja zintegrowanego monitoringu strukturalnego na przykładzie systemu kontrolnopomiarowego Leica GeoMoS Krzysztof Karsznia, Krystian Portasiak Leica Geosystems Sp. z o.o. Systemy monitoringu strukturalnego
Koncepcja zintegrowanego monitoringu strukturalnego na przykładzie systemu kontrolnopomiarowego Leica GeoMoS Krzysztof Karsznia, Krystian Portasiak Leica Geosystems Sp. z o.o. Systemy monitoringu strukturalnego
Rok akademicki: 2018/2019 Kod: DGI s Punkty ECTS: 4. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Numeryczne opracowanie obserwacji GNSS Rok akademicki: 2018/2019 Kod: DGI-1-616-s Punkty ECTS: 4 Wydział: Geodezji Górniczej i Inżynierii Środowiska Kierunek: Geoinformacja Specjalność: Poziom
Nazwa modułu: Numeryczne opracowanie obserwacji GNSS Rok akademicki: 2018/2019 Kod: DGI-1-616-s Punkty ECTS: 4 Wydział: Geodezji Górniczej i Inżynierii Środowiska Kierunek: Geoinformacja Specjalność: Poziom
Wielofunkcyjny system precyzyjnego pozycjonowania satelitarnego ASG-EUPOS
 Wielofunkcyjny system precyzyjnego pozycjonowania satelitarnego ASG-EUPOS STACJE REFERENCYJNE SYSTEMU ASG-EUPOS WSTĘP Istnienie nowoczesnych, wielofunkcyjnych systemów precyzyjnego pozycjonowania satelitarnego,
Wielofunkcyjny system precyzyjnego pozycjonowania satelitarnego ASG-EUPOS STACJE REFERENCYJNE SYSTEMU ASG-EUPOS WSTĘP Istnienie nowoczesnych, wielofunkcyjnych systemów precyzyjnego pozycjonowania satelitarnego,
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
Rozproszony system zbierania danych.
 Rozproszony system zbierania danych. Zawartość 1. Charakterystyka rozproszonego systemu.... 2 1.1. Idea działania systemu.... 2 1.2. Master systemu radiowego (koordynator PAN).... 3 1.3. Slave systemu
Rozproszony system zbierania danych. Zawartość 1. Charakterystyka rozproszonego systemu.... 2 1.1. Idea działania systemu.... 2 1.2. Master systemu radiowego (koordynator PAN).... 3 1.3. Slave systemu
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static
 Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
RAION BASIC MES SYSTEM ANDON & OEE
 RAION BASIC MES SYSTEM ANDON & OEE Co to jest? Raion Basic MES System Andon & OEE RAION BASIC MES SYSTEM - ANDON & OEE System przeznaczony do usprawnienia procesu produkcji poprzez sygnalizację miejsca
RAION BASIC MES SYSTEM ANDON & OEE Co to jest? Raion Basic MES System Andon & OEE RAION BASIC MES SYSTEM - ANDON & OEE System przeznaczony do usprawnienia procesu produkcji poprzez sygnalizację miejsca
Samochodowe systemy kontrolno dyspozytorskie GPS
 Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji Szymon Wajda główny specjalista
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji Szymon Wajda główny specjalista
1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
 SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność: