UKŁADY SEKWENCYJNE. Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Zbiornik z trzema zaworami. Układ Start Stop. Podnośnik góra dół.
|
|
|
- Bogna Wrona
- 8 lat temu
- Przeglądów:
Transkrypt
1 UKŁADY SEKWENCYJNE PRz AiS - 0 Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Zbiornik z trzema zaworami. Układ Start Stop. Podnośnik góra dół.. Automaty Moore a i Mealy ego WPROWADZENIE Układy sekwencyjne nazywa się zwykle automatami. Automat Moore a cykl (takt) Automat Mealy ego cykl X t Q t Y t δ µ X t Q t Y t δ µ Funkcja przejścia: Funkcja wyjścia: Q t+ = δ(q t, X t ) Y t = µ(q t ) Q t+ = δ(q t, X t ) Y t = µ(q t, X t ) W automacie Moore a wyjście zależy wyłącznie od stanu wewnętrznego Q (głównie takie automaty będą rozpatrywane). Stan wewnętrzny jest reprezentowany przez pamięć. Zmienna stan występuje w typowych realizacjach programowych układów sekwencyjnych.. Automaty synchroniczne i asynchroniczne Automat synchroniczny zmiany stanu następują w ściśle określonych momentach czasu (w automatach asynchronicznych tak nie jest). Realizacje programowe układów sekwencyjnych, zwłaszcza złożonych, są zwykle automatami synchronicznymi. Automaty asynchroniczne są prostsze i dopuszczają zmiany cyklu (tzn. czasu wykonania programu). 3. Rozpoznanie układu kombinacyjnego i sekwencyjnego Jeżeli na podstawie obserwacji aktualnych wejść nie da się wprost stwierdzić, co należy uczynić, to mamy do czynienia z układem sekwencyjnym, tzn. z pamięcią (nie można podjąć decyzji znając tylko aktualne wejścia; trzeba rozważyć, co zdarzyło się wcześniej).
2 . Problem NAPEŁNIANIE I OPRÓŻNIANIE Chodzi o cykliczne, naprzemienne napełnianie i opróżnianie zbiornika za pomocą zaworów Z, Z. Z zakłócenie zakłócenie x h x Z h, x, x poziomy: aktualny, dolny, górny Z, Z zawory: wlewowy, spustowy Specyfikacja (algorytm): h < x otwórz Z, zamknij Z h > x zamknij Z, otwórz Z Pytanie. Co uczynić przy poziomie pośrednim? Ponieważ odpowiedź nie jest natychmiastowa, bo potrzebne jest rozważenie stanu poprzedniego, więc mamy do czynienia z układem sekwencyjnym.. Projektowanie systematyczne. Przebiegi czasowe. Definiowane stanów automatu 3. Graf stanów 4. Program: C, ST, LD 3. Przebiegi czasowe Kreśli się je w uzgodnieniu z formułującym zadanie. x h zakłócenie x zakłócenie Z Z
3 4. Definiowane stanów Należy zwracać uwagę na te momenty, gdy automat ma zareagować, tzn. zmienić wyjście (sterowanie). Pomiędzy tymi momentami mamy do czynienia ze stanami stabilnymi, które należy odpowiednio nazwać. Są one podstawą do dalszej analizy. napełnianie, opróżnianie Stany stabilne zaznacza się na przebiegu (zob. rysunek). 5. Graf stanów Konstruowanie: ) stany małe kółka z nazwami ) przejścia zorientowane strzałki z opisem warunku przejścia z tablicy 3) wyjścia prostokąty z wartościami odpowiednio do stanu 4) pętle pozostawania w stanie opis warunku (opcjonalnie). x == 0 x == x == Z = Z = 0 x == 0 Z = 0 Z = Uwaga. Opisy grafu odpowiadają instrukcjom języka C. PROGRAMOWANIE. Język C Instrukcja switch Jest to podstawowa instrukcja do programowania sekwencji. Kod programu jest bezpośrednim odzwierciedleniem grafu automatu. Warunki zapisane przy pętlach nie występują w programie (chodzi o pozostawanie w stanie). if else 3
. W przypadku niepoprawnych pomiarów obydwa zawory należy zamknąć.")
4 Uwaga. else jest potrzebne, aby w danym cyklu wykonać tylko jedną instrukcję if. Rozwiązanie if else jest stosowane w prostych językach skryptowych, w których brak odpowiednika instrukcji switch.. Język ST Odpowiednikiem instrukcji switch jest CASE OF 3. Niepoprawne pomiary Wymaganie technologiczne (przykładowe). W przypadku niepoprawnych pomiarów obydwa zawory należy zamknąć. x x 0 niepoprawność (zero) x x 0 0 4
, Variables Text display, MAIN.")
5 4. Prosta wizualizacja Ikona Visualization (na dole) > eksplorator Visualizations, menu Add Object > Name Zbiornik Docelowy obraz Elementy Zawory: Polygon, Variables Change color, MAIN.Z/Z Przyciski: Text, Input Toggle variable, MAIN.x/x, Colors zielony/czerwony Wyświetlacz stanu: Rectangle, Text %d (format), Variables Text display, MAIN.stan Napisy: Rectangle, Text Z, Z, stan, Colors No frame color. Porównać wizualizację układów: nie uwzględniającego możliwych niepoprawnych pomiarów zamykającego zawory przy niepoprawnych pomiarach. 5
, S wejście ustawiające (set),")
6 PRZERZUTNIK RS. Bloki dwustanowe normy PN EN 63 3 Oznaczenia wejść/wyjść na poniższych schematach i w opisach są następujące: Q wyjście typu, R wejście zerowania logicznego (reset), S wejście ustawiające (set), Wartości początkowe wszystkich wejść są zerowe. Bloki dwustanowe S RS Q RS przerzutnik typu RS (RS flip-flop) Q = NOT R AND (Q n- OR S) R S SR Q SR przerzutnik typu SR (SR flip-flop) Q =S OR (NOT R AND Q n- ) R SEMA CLAIM BUSY RELEASE SEMA semafor (semaphore) BUSY = TRUE dla CLAIM=TRUE BUSY = FALSE dla RELEASE=TRUE i CLAIM=FALSE SEMA głównie stosowany do definiowania dostępu do zasobów system operacyjnego. Realizacja przerzutnika RS według wzoru z normy ST RS układ podtrzymujący (zapamiętujący) przełącznik załącz/wyłącz LD 6
 LD Menu Function Block lub ikona (górny pasek) > Okno Input")
7 3. Biblioteczny blok RS (TwinCAT) Zasoby projektu Resources (prawa dolna ikona pod eksploratorem) Library Manger > RS(FB) Wejścia/wyjścia: SET, RESET, Q 4. Blok RS w programie ST Deklaracje zmienne wejściowe i wyjściowe instancja bloku (rezerwacja pamięci) LD Menu Function Block lub ikona (górny pasek) > Okno Input assistant > RS(FB) 7

8 5. Program RS jako automat ST Przebiegi czasowe S R Q Stany wyzerowany ustawiony Automat S &&!R!S R!R Q = 0 R Q = Oznaczenia jak w języku C. 8

9 ST UKŁAD START STOP. Problem Silnik jest załączany przyciskiem start, a wyłączany przyciskiem stop. Raz włączony silnik pracuje, aż do przyciśnięcia stop (pomimo zwolnienia start). Stop ma priorytet nad start, tzn. jednoczesne naciśnięcie obydwu przycisków nie uruchamia silnika. Dostępny jest ponadto sygnał alarm działający tak jak stop, tzn. gdy jest on ustawiony, to silnika nie można uruchomić. Wyjaśnienie. Zwykle alarm pochodzi z termicznego zabezpieczenia silnika.. Przebiegi czasowe start stop alarm silnik 3. Stany zatrzymanie praca 4. Automat 9
10 start &&!stop &&!alarm!start stop alarm!stop &&!alarm silnik = 0 Oznaczenia jak w języku C. stop alarm silnik = 5. Programy C ST 6. Wzór bezpośredni Wzór zastępuje automat silnik i ( starti silnik i ) stopi alarmi gdzie silnik i- jest wartością zmiennej z poprzedniego cyklu obliczeniowego (i-). Pozostałe oznaczenia dotyczą cyklu aktualnego (i). C ST LD 0
 Q = dla CLK F_TRIG detektor zbocza opadającego")
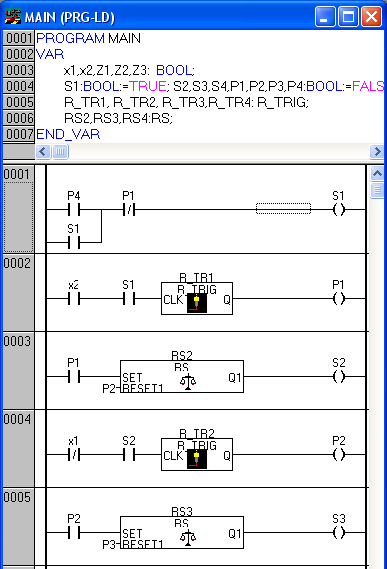
11 7. Start Stop z przerzutnikiem RS Wzór opisujący układ Start Stop (powyżej) jest prostym rozszerzeniem wzoru dla przerzutnika RS. ST i LD. Detektory zbocza PN EN 63 3 AUTOMATY W JĘZYKU LD Detektory zbocza R_TRIG CLK Q F_TRIG CLK Q R_TRIG detektor zbocza narastającego (rising edge detector) Q = dla CLK F_TRIG detektor zbocza opadającego (falling edge detector) Q = dla CLK CLK narastające zbocze wejścia CLK; CLK zbocze opadające. R_TRIG w TwinCAT (Library Manager)
12 Bloki R_TRIG, F_TRIG służą do generacji pojedynczych impulsów, np. przejść między stanami automatu.. Zasady programowania automatów Stany automatu są reprezentowane przez zmienne S, S, (). Przejścia między stanami reprezentują zmienne P, P, (). Szczebel stanu S jest układem z podtrzymaniem (zapamiętaniem) lub przerzutnikiem RS ustawianym przez przejście dochodzące (lub przejścia), a zerowanym przez przejście wychodzące. Szczebel przejścia P zawiera warunek przejścia (z grafu automatu), stan S, z którego przejście wychodzi oraz blok R_TRIG generujący impuls. Wyjście sterujące jest równe logicznej sumie stanów S (połączenie równoległe), w których wyjście to ma być ustawione (na TRUE). 3. Napełnianie i opróżnianie Automat x == 0 x == x == Z = Z = 0 x == 0 Z = 0 Z = LD

13 Szczeble S, S zrealizowano alternatywnie. 4. Układ Start Stop Automat start &&!stop &&!alarm!start stop alarm!stop &&!alarm silnik = 0 stop alarm silnik = LD 3

14 ZBIORNIK Z TRZEMA ZAWORAMI. Problem Zbiornik pokazany na rysunku jest napełniany na zmianę zaworami dopływowymi Z, Z, a po napełnieniu opróżniany zaworem Z3. Sekwencja pracy wygląda następująco: otwarcie Z, aż poziom osiągnie x zamknięcie Z, otwarcie Z3, aż poziom spadnie do x zamknięcie Z3, otwarcie Z, aż poziom osiągnie x zamknięcie Z, otwarcie Z3, aż poziom spadnie do x zamknięcie Z3, otwarcie Z itd.. Przebiegi czasowe Z Z x h x Z3 4
15 x x Z Z Z Stany 3 4 napełnianie z zaworu Z opróżnianie po Z napełnianie z zaworu Z opróżnianie po Z 4. Automat x == 0 x == x == Z = 0 Z = 0 Z3 = x == 0 x == 0 Z = Z = 0 Z3 = 0 x == 0 4 x == x == Z = 0 Z = 0 Z3 = 3 Z = 0 Z = Z3 = 0 Oznaczenia jak w języku C. 5. Programy 5
16 C ST LD 6
17 7
UKŁADY SEKWENCYJNE WPROWADZENIE
 PRz AiSD W2 UKŁADY SEKWENCYJNE Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Przerzutnik RS. Układ Start Stop. Automaty w języku LD. Zbiornik z trzema zaworami. Urządzenia automatyki i sterowania..
PRz AiSD W2 UKŁADY SEKWENCYJNE Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Przerzutnik RS. Układ Start Stop. Automaty w języku LD. Zbiornik z trzema zaworami. Urządzenia automatyki i sterowania..
UKŁADY SEKWENCYJNE WPROWADZENIE
 PRz AiRA UKŁADY SEKWENCYJNE Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Przerzutnik RS. Układ Start Stop. Automaty w języku LD. Zbiornik z trzema zaworami. Sterowanie symulowanym zbiornikiem.
PRz AiRA UKŁADY SEKWENCYJNE Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Przerzutnik RS. Układ Start Stop. Automaty w języku LD. Zbiornik z trzema zaworami. Sterowanie symulowanym zbiornikiem.
PROGRAMY STEROWANIA I WIZUALIZACJI II
 PWSZ SW W8 PROGRAMY STEROWANIA I WIZUALIZACJI II Układ sekwencyjny Start Stop. Podnośnik góra dół. Układ czasowy naprzemienne załączanie/wyłączanie. Sterowanie symulowanym zbiornikiem. 1. Zadanie UKŁAD
PWSZ SW W8 PROGRAMY STEROWANIA I WIZUALIZACJI II Układ sekwencyjny Start Stop. Podnośnik góra dół. Układ czasowy naprzemienne załączanie/wyłączanie. Sterowanie symulowanym zbiornikiem. 1. Zadanie UKŁAD
Standardowe bloki funkcjonalne
 Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
ELEMENTARNA WIZUALIZACJA
 ELEMENTARNA WIZUALIZACJA PRz AiS- 2012 Specyfika wizualizacji w systemach wbudowanych. Elementarna wizualizacja. Ustawianie zmiennej suwak. SPECYFIKA WIZUALIZACJI W SYSTEMACH WBUDOWANYCH 1. Systemy wbudowane
ELEMENTARNA WIZUALIZACJA PRz AiS- 2012 Specyfika wizualizacji w systemach wbudowanych. Elementarna wizualizacja. Ustawianie zmiennej suwak. SPECYFIKA WIZUALIZACJI W SYSTEMACH WBUDOWANYCH 1. Systemy wbudowane
PROGRAMOWANIE Z LICZNIKIEM CYKLI
 PRz AiS - 2012 UKŁADY CZASOWE Programowanie z licznikiem cykli. Fala prostokątna. Standardowe czasomierze. Fala prostokątna w LD. Zabezpieczenie silnika. Drugie naciśnięcie. Minimalne układy z czasomierzami.
PRz AiS - 2012 UKŁADY CZASOWE Programowanie z licznikiem cykli. Fala prostokątna. Standardowe czasomierze. Fala prostokątna w LD. Zabezpieczenie silnika. Drugie naciśnięcie. Minimalne układy z czasomierzami.
Asynchroniczne statyczne układy sekwencyjne
 Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Część 3. Układy sekwencyjne. Układy sekwencyjne i układy iteracyjne - grafy stanów TCiM Wydział EAIiIB Katedra EiASPE 1
 Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Programowalne układy logiczne
 Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Systemy wbudowane. Wprowadzenie. Nazwa. Oznaczenia. Zygmunt Kubiak. Sterowniki PLC - Wprowadzenie do programowania (1)
") ybrane funkcje logiczne prowadzenie L L2 Y Nazwa Oznaczenia Y Sterowniki PLC - prowadzenie do programowania () Proste przykłady Załączenie jednego z dwóch (lub obu) przełączników lub powoduje zapalenie
ybrane funkcje logiczne prowadzenie L L2 Y Nazwa Oznaczenia Y Sterowniki PLC - prowadzenie do programowania () Proste przykłady Załączenie jednego z dwóch (lub obu) przełączników lub powoduje zapalenie
UKŁADY SEKWENCYJNO CZASOWE I SPECJALNE
 PRz AiRA UKŁADY SEKWENCYJNO CZASOWE I SPECJALNE Zbiornik z dwoma zaworami. Reaktor chemiczny. Powtarzanie impulsu o mierzonym czasie trwania. Generacja chwilowego impulsu po zadanym czasie. Zespół trzech
PRz AiRA UKŁADY SEKWENCYJNO CZASOWE I SPECJALNE Zbiornik z dwoma zaworami. Reaktor chemiczny. Powtarzanie impulsu o mierzonym czasie trwania. Generacja chwilowego impulsu po zadanym czasie. Zespół trzech
Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
Proste układy sekwencyjne
 Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Cyfrowe układy sekwencyjne. 5 grudnia 2013 Wojciech Kucewicz 2
 Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
Projekt z przedmiotu Systemy akwizycji i przesyłania informacji. Temat pracy: Licznik binarny zliczający do 10.
 Projekt z przedmiotu Systemy akwizycji i przesyłania informacji Temat pracy: Licznik binarny zliczający do 10. Andrzej Kuś Aleksander Matusz Prowadzący: dr inż. Adam Stadler Układy cyfrowe przetwarzają
Projekt z przedmiotu Systemy akwizycji i przesyłania informacji Temat pracy: Licznik binarny zliczający do 10. Andrzej Kuś Aleksander Matusz Prowadzący: dr inż. Adam Stadler Układy cyfrowe przetwarzają
Cyfrowe układy scalone c.d. funkcje
 Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
UKŁADY CZASOWE PROGRAMOWANIE Z LICZNIKIEM CYKLI FALA PROSTOKĄTNA
 PRz AiRA UKŁADY CZASOWE Programowanie z licznikiem cykli. Fala prostokątna. Standardowe czasomierze. Fala prostokątna w LD. Zabezpieczenie silnika. Drugie naciśnięcie. Minimalne układy z czasomierzami.
PRz AiRA UKŁADY CZASOWE Programowanie z licznikiem cykli. Fala prostokątna. Standardowe czasomierze. Fala prostokątna w LD. Zabezpieczenie silnika. Drugie naciśnięcie. Minimalne układy z czasomierzami.
Automatyzacja i robotyzacja procesów produkcyjnych
 Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1. Układy kombinacyjne i sekwencyjne - przypomnienie
 SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1 Układy kombinacyjne i sekwencyjne - przypomnienie SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 2 Stan
SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1 Układy kombinacyjne i sekwencyjne - przypomnienie SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 2 Stan
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Przerzutnik ma pewną liczbę wejść i z reguły dwa wyjścia.
 Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
ĆWICZENIE 7. Wprowadzenie do funkcji specjalnych sterownika LOGO!
 ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
Laboratorium przedmiotu Technika Cyfrowa
 Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
WFiIS CEL ĆWICZENIA WSTĘP TEORETYCZNY
 WFiIS LABORATORIUM Z ELEKTRONIKI Imię i nazwisko: 1. 2. TEMAT: ROK GRUPA ZESPÓŁ NR ĆWICZENIA Data wykonania: Data oddania: Zwrot do poprawy: Data oddania: Data zliczenia: OCENA CEL ĆWICZENIA Ćwiczenie
WFiIS LABORATORIUM Z ELEKTRONIKI Imię i nazwisko: 1. 2. TEMAT: ROK GRUPA ZESPÓŁ NR ĆWICZENIA Data wykonania: Data oddania: Zwrot do poprawy: Data oddania: Data zliczenia: OCENA CEL ĆWICZENIA Ćwiczenie
Podstawowe elementy układów cyfrowych układy sekwencyjne. Rafał Walkowiak
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Plan wykładu. Architektura systemów komputerowych. Cezary Bolek
 Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
zmiana stanu pamięci następuje bezpośrednio (w dowolnej chwili czasu) pod wpływem zmiany stanu wejść,
 pod wpływem zmiany stanu wejść,") Sekwencyjne układy cyfrowe Układ sekwencyjny to układ cyfrowy, w którym zależność między wartościami sygnałów wejściowych (tzw. stan wejść) i wyjściowych (tzw. stan wyjść) nie jest jednoznaczna. Stan wyjść
Sekwencyjne układy cyfrowe Układ sekwencyjny to układ cyfrowy, w którym zależność między wartościami sygnałów wejściowych (tzw. stan wejść) i wyjściowych (tzw. stan wyjść) nie jest jednoznaczna. Stan wyjść
Podstawy Automatyki. Człowiek- najlepsza inwestycja. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
 Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Podstawy Automatyki. Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2015 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2015 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów. Rafał Walkowiak Wersja /2015
 Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów synchronicznych Rafał Walkowiak Wersja.2 24/25 UK Funkcje wzbudzeń UK Funkcje wzbudzeń Pamieć Pamieć UK Funkcje wyjściowe
Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów synchronicznych Rafał Walkowiak Wersja.2 24/25 UK Funkcje wzbudzeń UK Funkcje wzbudzeń Pamieć Pamieć UK Funkcje wyjściowe
UKŁADY KOMBINACYJNE WPROWADZENIE. przerzutniki, bramki ze sprzężeniami zwrotnymi. Układ przełączający Y t. Q t stan wewnętrzny
 UKŁADY KOMBINACYJNE PRz 2013 Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD PLC
UKŁADY KOMBINACYJNE PRz 2013 Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD PLC
Układy sekwencyjne. 1. Czas trwania: 6h
 Instytut Fizyki oświadczalnej UG Układy sekwencyjne 1. Czas trwania: 6h 2. Cele ćwiczenia Poznanie zasad działania podstawowych typów przerzutników: RS, -latch,, T, JK-MS. Poznanie zasad działania rejestrów
Instytut Fizyki oświadczalnej UG Układy sekwencyjne 1. Czas trwania: 6h 2. Cele ćwiczenia Poznanie zasad działania podstawowych typów przerzutników: RS, -latch,, T, JK-MS. Poznanie zasad działania rejestrów
Automat skończony FSM Finite State Machine
 Automat skończony FSM Finite State Machine Projektowanie detektora sekwencji Laboratorium z Elektroniki Współczesnej A. Skoczeń, KOiDC, WFiIS, AGH, 2019 AGH, WFiIS, Elektronika Współczesna 1 Deterministyczny
Automat skończony FSM Finite State Machine Projektowanie detektora sekwencji Laboratorium z Elektroniki Współczesnej A. Skoczeń, KOiDC, WFiIS, AGH, 2019 AGH, WFiIS, Elektronika Współczesna 1 Deterministyczny
Podstawy Automatyki. Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2016 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2016 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Podział układów cyfrowych. rkijanka
 Podział układów cyfrowych rkijanka W zależności od przyjętego kryterium możemy wyróżnić kilka sposobów podziału układów cyfrowych. Poniżej podam dwa z nich związane ze sposobem funkcjonowania układów cyfrowych
Podział układów cyfrowych rkijanka W zależności od przyjętego kryterium możemy wyróżnić kilka sposobów podziału układów cyfrowych. Poniżej podam dwa z nich związane ze sposobem funkcjonowania układów cyfrowych
Podstawy Elektroniki dla Elektrotechniki. Liczniki synchroniczne na przerzutnikach typu D
 AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
Projektowanie Scalonych Systemów Wbudowanych VERILOG
 Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające
 Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Liczniki klasyfikacja Licznik asynchroniczny:
Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Liczniki klasyfikacja Licznik asynchroniczny:
Podstawy Automatyki. Wykład 13 - Wprowadzenie do układów sekwencyjnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające
 Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Sekwencyjny układ przełączający układ przełączający
Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Sekwencyjny układ przełączający układ przełączający
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 1.Zasada działania2 Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvTR 16.04.09 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1.ZASADA DZIAŁANIA... 2 2. FUNKCJE WEJŚCIOWE... 4 2.1 Zasada
1.Zasada działania2 Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvTR 16.04.09 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1.ZASADA DZIAŁANIA... 2 2. FUNKCJE WEJŚCIOWE... 4 2.1 Zasada
Ćw. 7: Układy sekwencyjne
 Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Podstawy układów mikroelektronicznych
 Podstawy układów mikroelektronicznych wykład dla kierunku Technologie Kosmiczne i Satelitarne Część 2. Podstawy działania układów cyfrowych. dr inż. Waldemar Jendernalik Katedra Systemów Mikroelektronicznych,
Podstawy układów mikroelektronicznych wykład dla kierunku Technologie Kosmiczne i Satelitarne Część 2. Podstawy działania układów cyfrowych. dr inż. Waldemar Jendernalik Katedra Systemów Mikroelektronicznych,
W 5_2 Typy języków programowania sterowników PLC (zdefiniowane w IEC-61131) - języki graficzne (LD, FBD); języki tekstowe (ST, IL).
 - języki graficzne (LD, FBD); języki tekstowe (ST, IL).") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Ćw. 9 Przerzutniki. 1. Cel ćwiczenia. 2. Wymagane informacje. 3. Wprowadzenie teoretyczne PODSTAWY ELEKTRONIKI MSIB
 Ćw. 9 Przerzutniki 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi elementami sekwencyjnymi, czyli przerzutnikami. Zostanie przedstawiona zasada działania przerzutników oraz sposoby
Ćw. 9 Przerzutniki 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi elementami sekwencyjnymi, czyli przerzutnikami. Zostanie przedstawiona zasada działania przerzutników oraz sposoby
Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne Alfabety i litery Układ logiczny opisywany jest przez wektory, których wartości reprezentowane są przez ciągi kombinacji zerojedynkowych.
Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne Alfabety i litery Układ logiczny opisywany jest przez wektory, których wartości reprezentowane są przez ciągi kombinacji zerojedynkowych.
1.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych
 .Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
Cyfrowe Elementy Automatyki. Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem
 Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
2019/09/16 07:46 1/2 Laboratorium AITUC
 2019/09/16 07:46 1/2 Laboratorium AITUC Table of Contents Laboratorium AITUC... 1 Uwagi praktyczne przed rozpoczęciem zajęć... 1 Lab 1: Układy kombinacyjne małej i średniej skali integracji... 1 Lab 2:
2019/09/16 07:46 1/2 Laboratorium AITUC Table of Contents Laboratorium AITUC... 1 Uwagi praktyczne przed rozpoczęciem zajęć... 1 Lab 1: Układy kombinacyjne małej i średniej skali integracji... 1 Lab 2:
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające
 PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
Zapoznanie się z podstawowymi strukturami liczników asynchronicznych szeregowych modulo N, zliczających w przód i w tył oraz zasadą ich działania.
 Badanie liczników asynchronicznych - Ćwiczenie 4 1. el ćwiczenia Zapoznanie się z podstawowymi strukturami liczników asynchronicznych szeregowych modulo N, zliczających w przód i w tył oraz zasadą ich
Badanie liczników asynchronicznych - Ćwiczenie 4 1. el ćwiczenia Zapoznanie się z podstawowymi strukturami liczników asynchronicznych szeregowych modulo N, zliczających w przód i w tył oraz zasadą ich
SFC zawiera zestaw kroków i tranzycji (przejść), które sprzęgają się wzajemnie przez połączenia
, które sprzęgają się wzajemnie przez połączenia") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
UKŁADY CYFROWE. Układ kombinacyjny
 UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
Projektowanie automatów z użyciem VHDL
 Projektowanie automatów z użyciem VHDL struktura automatu i jego modelu w VHDL przerzutnik T jako automat przykłady automatów z wyjściami typu: Moore'a Mealy stanu kodowanie stanów automatu Wykorzystano
Projektowanie automatów z użyciem VHDL struktura automatu i jego modelu w VHDL przerzutnik T jako automat przykłady automatów z wyjściami typu: Moore'a Mealy stanu kodowanie stanów automatu Wykorzystano
LICZNIKI PODZIAŁ I PARAMETRY
 LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
Układy sekwencyjne. Podstawowe informacje o układach cyfrowych i przerzutnikach (rodzaje, sposoby wyzwalania).
.") Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvL 15.01.10 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. Spis treści 1.ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...4 2.1.Zasada działania...4
Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvL 15.01.10 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. Spis treści 1.ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...4 2.1.Zasada działania...4
W_4 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5
 Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5 1. Cel ćwiczenia Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami programowania Programowalnych Sterowników Logicznych
Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5 1. Cel ćwiczenia Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami programowania Programowalnych Sterowników Logicznych
Sławomir Kulesza. Projektowanie automatów synchronicznych
 Sławomir Kulesza Technika cyfrowa Projektowanie automatów synchronicznych Wykład dla studentów III roku Informatyki Wersja 2.0, 20/12/2012 Automaty skończone Automat Mealy'ego Funkcja wyjść: Yt = f(st,
Sławomir Kulesza Technika cyfrowa Projektowanie automatów synchronicznych Wykład dla studentów III roku Informatyki Wersja 2.0, 20/12/2012 Automaty skończone Automat Mealy'ego Funkcja wyjść: Yt = f(st,
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
dwójkę liczącą Licznikiem Podział liczników:
 1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
Synteza strukturalna automatów Moore'a i Mealy
 Synteza strukturalna automatów Moore'a i Mealy Formalna definicja automatu: A = < Z, Q, Y, Φ, Ψ, q 0 > Z alfabet wejściowy Q zbiór stanów wewnętrznych Y alfabet wyjściowy Φ funkcja przejść q(t+1) = Φ (q(t),
Synteza strukturalna automatów Moore'a i Mealy Formalna definicja automatu: A = < Z, Q, Y, Φ, Ψ, q 0 > Z alfabet wejściowy Q zbiór stanów wewnętrznych Y alfabet wyjściowy Φ funkcja przejść q(t+1) = Φ (q(t),
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 4. Przekaźniki czasowe
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 4. Przekaźniki czasowe Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny W tym ćwiczeniu będą realizowane programy sterujące zawierające elementy
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 4. Przekaźniki czasowe Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny W tym ćwiczeniu będą realizowane programy sterujące zawierające elementy
Programowalne układy logiczne
 Programowalne układy logiczne Przerzutniki Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 20 maja 2013 Przerzutnik synchroniczny Układ synchroniczny wyzwalany ustalonym
Programowalne układy logiczne Przerzutniki Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 20 maja 2013 Przerzutnik synchroniczny Układ synchroniczny wyzwalany ustalonym
Statyczne badanie przerzutników - ćwiczenie 3
 Statyczne badanie przerzutników - ćwiczenie 3. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz NO. 2. Wykaz
Statyczne badanie przerzutników - ćwiczenie 3. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz NO. 2. Wykaz
Ćwiczenie Technika Mikroprocesorowa komputery 001 Układy sekwencyjne cz. 1
 Ćwiczenie Technika Mikroprocesorowa komputery 001 Układy sekwencyjne cz. 1 TECHNIKA MIKROPROCESOROWA 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA
Ćwiczenie Technika Mikroprocesorowa komputery 001 Układy sekwencyjne cz. 1 TECHNIKA MIKROPROCESOROWA 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA
AUTOMATYKA I REGULACJA AUTOMATYCZNA LABORATORIUM
 AUTOMATYKA I REGULACJA AUTOMATYCZNA LABORATORIUM Programowanie sterownika BC8150 firmy Beckhoff wprowadzenie 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem BC8150 2. Tworzenie prostego programu
AUTOMATYKA I REGULACJA AUTOMATYCZNA LABORATORIUM Programowanie sterownika BC8150 firmy Beckhoff wprowadzenie 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem BC8150 2. Tworzenie prostego programu
Podstawy Techniki Cyfrowej Teoria automatów
 Podstawy Techniki Cyfrowej Teoria automatów Uwaga Niniejsza prezentacja stanowi uzupełnienie materiału wykładowego i zawiera jedynie wybrane wiadomości teoretyczne dotyczące metod syntezy układów asynchronicznych.
Podstawy Techniki Cyfrowej Teoria automatów Uwaga Niniejsza prezentacja stanowi uzupełnienie materiału wykładowego i zawiera jedynie wybrane wiadomości teoretyczne dotyczące metod syntezy układów asynchronicznych.
Statyczne i dynamiczne badanie przerzutników - ćwiczenie 2
 tatyczne i dynamiczne badanie przerzutników - ćwiczenie 2. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz
tatyczne i dynamiczne badanie przerzutników - ćwiczenie 2. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz
Układy sekwencyjne przerzutniki 2/18. Przerzutnikiem nazywamy elementarny układ sekwencyjny, wyposaŝony w n wejść informacyjnych (x 1.
 Przerzutniki Układy sekwencyjne przerzutniki 2/18 Pojęcie przerzutnika Przerzutnikiem nazywamy elementarny układ sekwencyjny, wyposaŝony w n wejść informacyjnych (x 1... x n ), 1-bitową pamięć oraz 1 wyjście
Przerzutniki Układy sekwencyjne przerzutniki 2/18 Pojęcie przerzutnika Przerzutnikiem nazywamy elementarny układ sekwencyjny, wyposaŝony w n wejść informacyjnych (x 1... x n ), 1-bitową pamięć oraz 1 wyjście
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1
 Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
TEMAT: PROJEKTOWANIE I BADANIE PRZERZUTNIKÓW BISTABILNYCH
 Praca laboratoryjna 2 TEMAT: PROJEKTOWANIE I BADANIE PRZERZUTNIKÓW BISTABILNYCH Cel pracy poznanie zasad funkcjonowania przerzutników różnych typów w oparciu o różne rozwiązania układowe. Poznanie sposobów
Praca laboratoryjna 2 TEMAT: PROJEKTOWANIE I BADANIE PRZERZUTNIKÓW BISTABILNYCH Cel pracy poznanie zasad funkcjonowania przerzutników różnych typów w oparciu o różne rozwiązania układowe. Poznanie sposobów
LEKCJA. TEMAT: Funktory logiczne.
 TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014
 Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie
 TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie 1. Uruchomienie programu TwinCAT 3: a) Kliknąć w start i wpisać wpisać frazę twincat. b) Kliknąć w ikonę jak poniżej: 2. Wybrać w menu
TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie 1. Uruchomienie programu TwinCAT 3: a) Kliknąć w start i wpisać wpisać frazę twincat. b) Kliknąć w ikonę jak poniżej: 2. Wybrać w menu
Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp:
 Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp: Licznik elektroniczny - układ cyfrowy, którego zadaniem jest zliczanie wystąpień sygnału zegarowego. Licznik złożony
Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp: Licznik elektroniczny - układ cyfrowy, którego zadaniem jest zliczanie wystąpień sygnału zegarowego. Licznik złożony
PIERWSZY PROGRAM W JĘZYKU FBD
 CODESYS PIERWSZY PROGRAM 1 PIERWSZY PROGRAM W JĘZYKU FBD Materiał ten stanowi skróconą wersję opracowania omawiającego pracę w środowisku CoDeSys (plik CoDeSys na stronie przedmiotu). Poniżej przedstawiona
CODESYS PIERWSZY PROGRAM 1 PIERWSZY PROGRAM W JĘZYKU FBD Materiał ten stanowi skróconą wersję opracowania omawiającego pracę w środowisku CoDeSys (plik CoDeSys na stronie przedmiotu). Poniżej przedstawiona
Architektura komputerów Wykład 2
 Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
CoDeSys 3 programowanie w języku drabinkowym LD
 Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Projekt sekwencyjnego układu przełączającego z wykorzystaniem sterownika programowalnego Podstawy automatyki i automatyzacji - Ćwiczenia Laboratoryjne
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt sekwencyjnego układu przełączającego z wykorzystaniem sterownika programowalnego Podstawy automatyki i automatyzacji - Ćwiczenia Laboratoryjne
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt sekwencyjnego układu przełączającego z wykorzystaniem sterownika programowalnego Podstawy automatyki i automatyzacji - Ćwiczenia Laboratoryjne
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1.ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE... 4 2.1 Zasada działania...4 2.2 Spis funkcji wejściowych oraz wejść...4 2.2.1 Nastawy
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1.ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE... 4 2.1 Zasada działania...4 2.2 Spis funkcji wejściowych oraz wejść...4 2.2.1 Nastawy
Język HDL - VERILOG. (Syntetyzowalna warstwa języka) Hardware Description Language Krzysztof Jasiński PRUS PRUS
 Hardware Description Language Krzysztof Jasiński PRUS PRUS") Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS Język VERLOG w praktyce RUS RUS VERLOG Specyfikacja układów kombinacyjnych RUS RUS Operator warunkowy Conditional_expression?
Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS Język VERLOG w praktyce RUS RUS VERLOG Specyfikacja układów kombinacyjnych RUS RUS Operator warunkowy Conditional_expression?
CoDeSys 3 programowanie w języku FBD
 Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Tworzenie prostego programu w językach ST i LD
 Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
1. JĘZYK SFC WPROWADZENIE
 DODATEK: JĘZYK SFC. JĘZYK SFC PROADZENIE Język SFC jest językiem graficznym opartym na teorii sieci Petriego typu P/T (pozycja/tranzycja). Należy do grupy języków sekwencyjnych schematów funkcjonalnych
DODATEK: JĘZYK SFC. JĘZYK SFC PROADZENIE Język SFC jest językiem graficznym opartym na teorii sieci Petriego typu P/T (pozycja/tranzycja). Należy do grupy języków sekwencyjnych schematów funkcjonalnych
Spis treści. Przedmowa Wykaz oznaczeń Wstęp Układy kombinacyjne... 18
 Spis treści Przedmowa... 11 Wykaz oznaczeń... 13 1. Wstęp... 15 1.1. Układycyfrowe... 15 1.2. Krótki esej o projektowaniu.... 15 2. Układy kombinacyjne... 18 2.1. Podstawyprojektowaniaukładówkombinacyjnych...
Spis treści Przedmowa... 11 Wykaz oznaczeń... 13 1. Wstęp... 15 1.1. Układycyfrowe... 15 1.2. Krótki esej o projektowaniu.... 15 2. Układy kombinacyjne... 18 2.1. Podstawyprojektowaniaukładówkombinacyjnych...
W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres
 PROJEKTOWANIE LICZNIKÓW (skrót wiadomości) Autor: Rafał Walkowiak W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres rafal.walkowiak@cs.put.poznan.pl 1. Synchroniczne łączenie liczników
PROJEKTOWANIE LICZNIKÓW (skrót wiadomości) Autor: Rafał Walkowiak W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres rafal.walkowiak@cs.put.poznan.pl 1. Synchroniczne łączenie liczników
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki
 Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur. Piotr Fita
 Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Definicje. Algorytm to:
 Algorytmy Definicje Algorytm to: skończony ciąg operacji na obiektach, ze ściśle ustalonym porządkiem wykonania, dający możliwość realizacji zadania określonej klasy pewien ciąg czynności, który prowadzi
Algorytmy Definicje Algorytm to: skończony ciąg operacji na obiektach, ze ściśle ustalonym porządkiem wykonania, dający możliwość realizacji zadania określonej klasy pewien ciąg czynności, który prowadzi
1 Moduł Neuronu Cyfrowego SM
 1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada