Projektowanie Systemów Elektromechanicznych. Wykład 3 Przekładnie
|
|
|
- Karolina Chmielewska
- 7 lat temu
- Przeglądów:
Transkrypt
1 Projektowanie Systemów Elektromechanicznych Wykła 3 Przekłanie
2 Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie
3 Przekłanie Hyrauliczne: Hyrostatyczne; Hyrokinetyczne postawą ziałania jest wykorzystanie energii kinetycznej płynu. Stosowane w w automatycznych skrzyniach biegów. Charakteryzują się stosunkowo niską sprawnością i możliwością przeciążenia bez niebezpieczeństwa przeciążenia ukłau napęowego.
4 Przekłanie zębate Zalety: Łatwość wykonania; Stosunkowo małe gabaryty; Stosunkowo cicha praca przy opowienim smarowaniu; Duża równomierność pracy; Wysoka sprawność (o 98%)
5 Przekłanie zębate Way: Stosunkowo niskie przełożenie la pojeynczego stopnia; Sztywna geometria; Brak naturalnego zabezpieczenia prze przeciążeniem.
6 Przekłanie zębate - poział Ze wzglęu na umiejscowienie zazębienia Zazębienie zewnętrzne; Zazębienie wewnętrzne. Rozaj ruchu: Przekłania obrotowa; Przekłania liniowa.
7 Przekłanie zębate - poział Wzajemne usytuowanie osi obrotu Przekłania czołowa: Walcowa; Stożkowa. Przekłania śrubowa: Ślimakowa; Hiperboloialna.
8 Przekłania prosta
9 Przełożenie przekłani i i Wprowazając pojęcie śrenicy poziałowej, moułu oraz poziałki zęba n n i z p z m i z z
10 Przekłania ślimakowa tg tg ( ) tg ( ) tg γ kąt wzniosu gwintu ς kąt tarcia, taki że współczynnik µ=tgς Elementem napęzającym jest ślimak Elementem napęzającym jest ślimacznica Samohamowność, gy: γ < ς, η < 0
11 Przekłania ślimakowa ślimak ślimacznica
12 Przekłania planetarna (obiegowa) Koło zębate wewnętrzne (centralne) z uzębieniem zewnętrznym; Satelity połączone jarzmem (, 3 lub 4); Koło zębate zewnętrzne z uzębieniem wewnętrznym.
13 Przekłania planetarna (obiegowa) Koło zębate zewnętrzne satelita Koło zębate wewnętrzne (słoneczne) Ruchome jarzmo
14 Przekłania planetarna - przełożenie Metoa chwilowego śroka obrotu i 3j Wzglęem punktu C j v B r v A v A v B r
15 Metoa chwilowego śroka obrotu Prękość liniową v owolnego punktu A ciała poruszającego się ruchem płaskim obrotowym z prękością kątową wzglęem nieruchomego w anej chwili punktu B można obliczyć jako iloczyn prękości kątowej i oległości r mięzy punktami A i B, czyli v= *r
16 Przekłania planetarna - Wzglęem punktu O przełożenie v B j r j j ( r r) v A wieząc, że: r v v A B r ( r r j )
17 Przekłania planetarna - przełożenie r r r j 3 r r r z z z r r r i j j ostatecznie:
18 Zalety: Przekłania pasowa Łagozenie gwałtownych zmian obciążenia; Tłumienie rgań; Zabezpieczenie zespołów napęowych prze namiernym przeciążeniem; Prostota, niskie koszty wytwarzania; Mała wrażliwość na okłaność wzajemnego ustawienia osi
19 Przekłania pasowa Way: Mała zwartość; Duże siły obciążające wały i łożyska naciąg pasów; Niestałość przełożenia poślizg pasów.
20 Przekłania pasowa
21 Przekłania pasowa - schemat
22 Przekłania pasowa - obliczenia. Wstępny obór przekroju pasa, śrenicy mniejszego koła (najmniejsze w anym typoszeregu, ze wzglęu na zwartość przekłani). Obliczenie prękości obwoowej na śrenicy skutecznej v p
23 Przekłania pasowa - obliczenia Obliczenie przełożenia i śrenicy skutecznej rugiego koła: i p p Obliczenie śrenicy równoważnej koła mniejszego: n n D e K p
24 Przekłania pasowa - obliczenia
25 Przekłania pasowa - obliczenia Oległość mięzyosiowa a: ) ( 50 p p p p a Długość pasów: cos ) ( 80 a L p p p p p
26 Przekłania pasowa - obliczenia a p p sin 80 Dobrać znormalizowaną ługość pasa L p Wynikowa oległość mięzyosiowa: cos ) ( 80 p p p p p L a
27 Przekłania pasowa - obliczenia Sprawzenie przenoszenia mocy N z N k L k T N moc przenoszona przez jeen pas obierana na postawie śrenicy równoważnej i prękości obwoowej; k L liczba uwzglęniająca zmienność obciążeń pasa zależna o jego ługości; k φ liczba zależna o kąta opasania; k k T liczba uwzglęniająca warunki i liczbę gozin pracy pasa klinowego.
28 Przekłania pasowa - obliczenia Liczba pasów: z N k L k T k Wariatory pasy płaskie, stożkowe koła; pasy klinowe, koła o zmiennej śrenicy skutecznej; płynna i skokowa zmiana przełożenia.
29 Wielokrążki Wielokrążek prosty; Wielokrążek potęgowy; Wielokrążek różnicowy
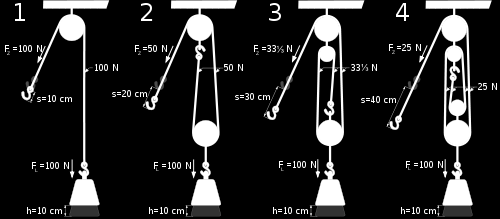
30 Wielokrążek prosty
31 Wielokrążek zwykły Siła niezbęna o uniesienia ciężaru Q: P k Q wkz wkz k ( k )
32 Wielokrążek zwykły Siła niezbęna o uniesienia ciężaru Q la: Końca cięgna umocowanego o zblocza nieruchomego: P Q n Końca cięgna umocowanego o zblocza ruchomego: P Q ( n )

33 Wielokrążek potęgowy P n Q wkp ( ) n wkp
( R r R (,0 0,99 R r) 0, (")
34 Wielokrążek różnicowy P R r R wkr Q wkr ( )( R r R (,0 0,99 R r) 0, ( ))
Projektowanie Systemów Elektromechanicznych. Przekładnie dr inż. G. Kostro
 Projektowanie Systemów Elektromechanicznych Przekłanie r inż. G. Kostro Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne;
Projektowanie Systemów Elektromechanicznych Przekłanie r inż. G. Kostro Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne;
A. ZałoŜenia projektowo konstrukcyjne
 Projekt przekłani pasowej ZADANIE KONSTRUKCYJNE Zaanie polega na opracowaniu konstrukcji przekłani pasowej przenoszącej moment obrotowy z wałka silnika na wał napęowy zespołu obrabiarki. A. ZałoŜenia projektowo
Projekt przekłani pasowej ZADANIE KONSTRUKCYJNE Zaanie polega na opracowaniu konstrukcji przekłani pasowej przenoszącej moment obrotowy z wałka silnika na wał napęowy zespołu obrabiarki. A. ZałoŜenia projektowo
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Koła pasowe mogą być mocowane bezpośrednio na wałach silników lub maszyn, lub z zastosowaniem specjalnych podpór
 PRZEKŁADNIA PASOWA Model fenomologiczny przekładni pasowej Rys.1. Własności przekładni pasowych Podstawowymi zaletami przekładni pasowej są: - łagodzenie gwałtownych zmian obciążenia i tłumienie drgań
PRZEKŁADNIA PASOWA Model fenomologiczny przekładni pasowej Rys.1. Własności przekładni pasowych Podstawowymi zaletami przekładni pasowej są: - łagodzenie gwałtownych zmian obciążenia i tłumienie drgań
Projektowanie Systemów Elektromechanicznych. Przekładnie dr inż. G. Kostro
 Projektowanie Systemów Elektromechanicznych Przekładnie dr inż. G. Kostro Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekładnie Przekładnie Hydrauliczne: Hydrostatyczne;
Projektowanie Systemów Elektromechanicznych Przekładnie dr inż. G. Kostro Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekładnie Przekładnie Hydrauliczne: Hydrostatyczne;
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Dobór sprzęgieł hydrokinetycznych 179 Bibliografia 183
 Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Koła stożkowe o zębach skośnych i krzywoliniowych oraz odpowiadające im zastępcze koła walcowe wytrzymałościowo równoważne
 Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
Zwolnice przekładnie boczne
 Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Badanie przekładni cięgnowej z pasami klinowymi
 POLITECHNIKA BIAŁOTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODTAWY KONTRUKCJI MAZYN II Temat ćwiczenia: Badanie przekładni cięgnowej
POLITECHNIKA BIAŁOTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODTAWY KONTRUKCJI MAZYN II Temat ćwiczenia: Badanie przekładni cięgnowej
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKULTYWACJI ĆWICZENIE NR 5
 INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKUTYWACJI aboratorium z mechaniki płynów ĆWICZENIE NR 5 POMIAR WSPÓŁCZYNNIKA STRAT PRZEPŁYWU NA DŁUGOŚCI. ZASTOSOWANIE PRAWA HAGENA POISEU A 1. Cel
INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKUTYWACJI aboratorium z mechaniki płynów ĆWICZENIE NR 5 POMIAR WSPÓŁCZYNNIKA STRAT PRZEPŁYWU NA DŁUGOŚCI. ZASTOSOWANIE PRAWA HAGENA POISEU A 1. Cel
Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate
 Wykład 3 Analiza kinematyczna przekładnie zębate") Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Instytut Konstrukcji Maszyn, Instytut Pojazdów Szynowych 1
 1. SPRZĘGŁO TULEJOWE. Sprawdzić nośność sprzęgła z uwagi na naciski powierzchniowe w rowkach wpustowych. Przyjąć, że p dop = 60 Pa. Zaproponować sposób zabezpieczenia tulei przed przesuwaniem się wzdłuż
1. SPRZĘGŁO TULEJOWE. Sprawdzić nośność sprzęgła z uwagi na naciski powierzchniowe w rowkach wpustowych. Przyjąć, że p dop = 60 Pa. Zaproponować sposób zabezpieczenia tulei przed przesuwaniem się wzdłuż
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Stanowisko napędów mechanicznych
 Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Przekładnie zębate : zasady działania : obliczenia geometryczne i wytrzymałościowe / Antoni Skoć, Eugeniusz Świtoński. Warszawa, 2017.
 Przekładnie zębate : zasady działania : obliczenia geometryczne i wytrzymałościowe / Antoni Skoć, Eugeniusz Świtoński. Warszawa, 2017 Spis treści Przedmowa XV 1. Znaczenie przekładni zębatych w napędach
Przekładnie zębate : zasady działania : obliczenia geometryczne i wytrzymałościowe / Antoni Skoć, Eugeniusz Świtoński. Warszawa, 2017 Spis treści Przedmowa XV 1. Znaczenie przekładni zębatych w napędach
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ
 KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
ogólna charakterystyka
 PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL BUP 12/14. ANTONI SZUMANOWSKI, Warszawa, PL PAWEŁ KRAWCZYK, Ciechanów, PL
 PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 222644 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222644 (13) B1 (21) Numer zgłoszenia: 401778 (51) Int.Cl. F16H 55/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 178576 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 310479 (22) Data zgłoszenia: 13.09.1995 (51) IntCl6: F16H 7/04 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 178576 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 310479 (22) Data zgłoszenia: 13.09.1995 (51) IntCl6: F16H 7/04 F16H
Wykład nr. 14 Inne wybrane rodzaje transmisji mocy
 Wykład nr. 14 Inne wybrane rodzaje transmisji mocy Przekładnie łańcuchowe 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch
Wykład nr. 14 Inne wybrane rodzaje transmisji mocy Przekładnie łańcuchowe 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch
WYDZIAŁ ZARZĄDZANIA PODSTAWY TECHNIKI I TECHNOLOGII
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
Przekładnie zębate - cel
 Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium: układ osi
Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium: układ osi
Analityczne metody kinematyki mechanizmów
 J Buśkiewicz Analityczne Metoy Kinematyki w Teorii Mechanizmów Analityczne metoy kinematyki mechanizmów Spis treści Współrzęne opisujące położenia ogniw pary kinematycznej Mechanizm korowo-wozikowy (crank-slier
J Buśkiewicz Analityczne Metoy Kinematyki w Teorii Mechanizmów Analityczne metoy kinematyki mechanizmów Spis treści Współrzęne opisujące położenia ogniw pary kinematycznej Mechanizm korowo-wozikowy (crank-slier
KO OF Szczecin:
 XXXI OLIMPIADA FIZYCZNA (1981/198) Stopień III, zaanie teoretyczne T Źróło: Nazwa zaania: Działy: Słowa kluczowe: Komitet Główny Olimpiay Fizycznej; Anrzej Kotlicki; Anrzej Naolny: Fizyka w Szkole, nr
XXXI OLIMPIADA FIZYCZNA (1981/198) Stopień III, zaanie teoretyczne T Źróło: Nazwa zaania: Działy: Słowa kluczowe: Komitet Główny Olimpiay Fizycznej; Anrzej Kotlicki; Anrzej Naolny: Fizyka w Szkole, nr
Przekładnie zębate. Klasyfikacja przekładni zębatych. 1. Ze względu na miejsce zazębienia. 2. Ze względu na ruchomość osi
 Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Rozróżnia proste przypadki obciążeń elementów konstrukcyjnych
 roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN. Ćwiczenie OB-2 BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-2 Temat: BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ Opracował: mgr inż. St. Sucharzewski Zatwierdził: prof.
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-2 Temat: BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ Opracował: mgr inż. St. Sucharzewski Zatwierdził: prof.
SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE
 SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE 1 Zakres momentów przenoszonych przez przekładnie przemysłowe w zestawieniu do motoreduktorów
SEW-EURODRIVE PRZEKŁADNIE PRZEMYSŁOWE A MOTOREDUKTORY PODOBIEŃSTWA I RÓŻNICE PRZY ZASTOSOWANIU ICH W PRZEMYŚLE 1 Zakres momentów przenoszonych przez przekładnie przemysłowe w zestawieniu do motoreduktorów
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop Spis treści
 Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop. 2016 Spis treści Przedmowa XI 1. Podział przekładni ślimakowych 1 I. MODELOWANIE I OBLICZANIE ROZKŁADU OBCIĄŻENIA W ZAZĘBIENIACH ŚLIMAKOWYCH
Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop. 2016 Spis treści Przedmowa XI 1. Podział przekładni ślimakowych 1 I. MODELOWANIE I OBLICZANIE ROZKŁADU OBCIĄŻENIA W ZAZĘBIENIACH ŚLIMAKOWYCH
Podstawy Konstrukcji Maszyn
 0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
Przenośniki Układy napędowe
 Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Projektowanie i dobieranie zespołów maszyn 311[20].Z2.03
![Projektowanie i dobieranie zespołów maszyn 311[20].Z2.03](/thumbs/25/4700452.jpg "Projektowanie i dobieranie zespołów maszyn 311[20].Z2.03") MINISTERSTWO EDUKACJI i NAUKI Marek Olsza Projektowanie i dobieranie zespołów maszyn 311[0].Z.03 Poradnik dla uczeń Wydawca Instytut Technologii Eksploatacji Państwowy Instytut Badawczy Radom 005 0 Recenzenci:
MINISTERSTWO EDUKACJI i NAUKI Marek Olsza Projektowanie i dobieranie zespołów maszyn 311[0].Z.03 Poradnik dla uczeń Wydawca Instytut Technologii Eksploatacji Państwowy Instytut Badawczy Radom 005 0 Recenzenci:
Przykłady obliczeń złączy na łączniki trzpieniowe obciążone poprzecznie wg PN-B-03150
 Politechnika Gańska Wyział Inżynierii Ląowej i Śroowiska Przykłay obliczeń złączy na łączniki trzpieniowe obciążone poprzecznie wg PN-B-03150 Jerzy Bobiński Gańsk, wersja 0.33 (2015) Politechnika Gańska
Politechnika Gańska Wyział Inżynierii Ląowej i Śroowiska Przykłay obliczeń złączy na łączniki trzpieniowe obciążone poprzecznie wg PN-B-03150 Jerzy Bobiński Gańsk, wersja 0.33 (2015) Politechnika Gańska
Podstawy konstruowania węzłów i części maszyn : podręcznik konstruowania / Leonid W. Kurmaz, Oleg L. Kurmaz. Kielce, 2011.
 Podstawy konstruowania węzłów i części maszyn : podręcznik konstruowania / Leonid W. Kurmaz, Oleg L. Kurmaz. Kielce, 2011 Spis treści Przedmowa 6 Wstęp 7 1. Wiadomości ogólne dotyczące procesu projektowania
Podstawy konstruowania węzłów i części maszyn : podręcznik konstruowania / Leonid W. Kurmaz, Oleg L. Kurmaz. Kielce, 2011 Spis treści Przedmowa 6 Wstęp 7 1. Wiadomości ogólne dotyczące procesu projektowania
Przekładnie cięgnowe. Rozdział. Główne właściwości przekładni cięgnowych
 5 1 Rozdział Przekładnie cięgnowe W przekładniach cięgnowych ruch i energia przenoszona jest za pomocą cięgna, które ma postać paska, linki lub podobnego elementu, np. łańcucha. Cięgno jest dość sztywne
5 1 Rozdział Przekładnie cięgnowe W przekładniach cięgnowych ruch i energia przenoszona jest za pomocą cięgna, które ma postać paska, linki lub podobnego elementu, np. łańcucha. Cięgno jest dość sztywne
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175715 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21)Numer zgłoszenia: 307901 (22) Data zgłoszenia: 27.03.1995 (51) IntCl6: B66D 1/12 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175715 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21)Numer zgłoszenia: 307901 (22) Data zgłoszenia: 27.03.1995 (51) IntCl6: B66D 1/12 (54)
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE na wybranych przykładach
 GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE System SOLID EDGE oferuje rozwiązania umożliwiające szybkie i poprawne projektowanie CAD 3D/2D w różnych branżach inżynierskich.
GM System przedstawia: Projektowanie części maszyn w systemie CAD SOLID EDGE System SOLID EDGE oferuje rozwiązania umożliwiające szybkie i poprawne projektowanie CAD 3D/2D w różnych branżach inżynierskich.
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MASZYNY PROSTE - WIELOKRĄŻKI
 7.. Cel ćwiczenia Ćwiczenie 7 MASZYNY ROSTE - WIELOKRĄŻKI Celem ćwiczenia jest teoretyczne i doświadczalne wyznaczenie sił w linach wielokrążka znajdującego się w położeniu równowagi i określenie sprawności
7.. Cel ćwiczenia Ćwiczenie 7 MASZYNY ROSTE - WIELOKRĄŻKI Celem ćwiczenia jest teoretyczne i doświadczalne wyznaczenie sił w linach wielokrążka znajdującego się w położeniu równowagi i określenie sprawności
Geometria płaska - matura Przyprostokątne trójkąta prostokątnego mają długości 3 7cm poprowadzona z wierzchołka kąta prostego ma długość: 12
 Geometria płaska - matura 010 1. Przyprostokątne trójkąta prostokątnego mają ługości 7cm i 4 7cm. Wysokość poprowazona z wierzchołka kąta prostego ma ługość: 1 5 A. 7cm B. cm C. 8 7cm D. 7 7cm 5 7. Miara
Geometria płaska - matura 010 1. Przyprostokątne trójkąta prostokątnego mają ługości 7cm i 4 7cm. Wysokość poprowazona z wierzchołka kąta prostego ma ługość: 1 5 A. 7cm B. cm C. 8 7cm D. 7 7cm 5 7. Miara
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 03/08. BOGDAN BRANOWSKI, Poznań, PL JAROSŁAW FEDORCZUK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
Podstawy Konstrukcji Maszyn
 Podstawy Konstrukcji Maszyn PRZEKŁADNIE PASOWE 1 Przekładnie pasowe Przekładnie pasowe służą do przenoszenia mocy za pośrednictwem cięgien w postaci pasów. Przekładnia pasowa cierna składa się z dwóch
Podstawy Konstrukcji Maszyn PRZEKŁADNIE PASOWE 1 Przekładnie pasowe Przekładnie pasowe służą do przenoszenia mocy za pośrednictwem cięgien w postaci pasów. Przekładnia pasowa cierna składa się z dwóch
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Koła pasowe zębate / Wałki zębate / Płytki łączące
 Strona Informacje o proukcie. Koła pasowe zębate Koła pasowe zębate.3 profil T Koła pasowe zębate.11 calowe Koła pasowe zębate.4 profil AT Koła pasowe zębate.49 profil HTD Koła pasowe zębate.75 profil
Strona Informacje o proukcie. Koła pasowe zębate Koła pasowe zębate.3 profil T Koła pasowe zębate.11 calowe Koła pasowe zębate.4 profil AT Koła pasowe zębate.49 profil HTD Koła pasowe zębate.75 profil
i j k Oprac. W. Salejda, L. Bujkiewicz, G.Harań, K. Kluczyk, M. Mulak, J. Szatkowski. Wrocław, 1 października 2015
 WM-E; kier. MBM, lisa za. nr. p. (z kary przemiou): Rozwiązywanie zaań z zakresu: ransformacji ukłaów współrzęnych, rachunku wekorowego i różniczkowo-całkowego o kursu Fizyka.6, r. ak. 05/6; po koniec
WM-E; kier. MBM, lisa za. nr. p. (z kary przemiou): Rozwiązywanie zaań z zakresu: ransformacji ukłaów współrzęnych, rachunku wekorowego i różniczkowo-całkowego o kursu Fizyka.6, r. ak. 05/6; po koniec
PRĘDKOŚĆ POŚLIZGU W ZAZĘBIENIU PRZEKŁADNI ŚLIMAKOWEJ
 KOMISJA BUDOWY MASZYN PAN ODDZIAŁ W POZNANIU ol. 7 nr Archiwum Technologii Maszyn i Automatyzacji 007 LESZEK SKOCZYLAS PRĘDKOŚĆ POŚLIZGU W ZAZĘBIENIU PRZEKŁADNI ŚLIMAKOWEJ W artykule przedstawiono sposób
KOMISJA BUDOWY MASZYN PAN ODDZIAŁ W POZNANIU ol. 7 nr Archiwum Technologii Maszyn i Automatyzacji 007 LESZEK SKOCZYLAS PRĘDKOŚĆ POŚLIZGU W ZAZĘBIENIU PRZEKŁADNI ŚLIMAKOWEJ W artykule przedstawiono sposób
WZORU UŻYTKOWEGO (,9,PL <1» 63238
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
Mechanizmy zębate Przekładnie zębate
 Mechanimy ębate Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium:
Mechanimy ębate Prekładnie ębate Prekładnie ębate - cel V M Prekładnia SILNIK = M M w w M w w ORGAN ROBOCZY Preniesienie ruchu jednego wału na drugi Zmiana momentu Zmiana prędkości obrotowej Podiał kryterium:
Schematy kinematyczne. Technologia napraw - ćwiczenia 133
 Schematy kinematyczne Technologia napraw - ćwiczenia 133 Plan zajęć Wprowadzenie Schemat - definicja Rodzaje schematów Schemat kinematyczny zasadniczy Schemat kinematyczny vs. normy Zasady wykonywania
Schematy kinematyczne Technologia napraw - ćwiczenia 133 Plan zajęć Wprowadzenie Schemat - definicja Rodzaje schematów Schemat kinematyczny zasadniczy Schemat kinematyczny vs. normy Zasady wykonywania
Badania pasowego układu cięgnowego dźwigu
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Maszyn Roboczych Ciężkich Laboratorium Dźwigów Ćwiczenie W6 Badania pasowego układu cięgnowego dźwigu Wersja robocza Tylko do użytku
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Maszyn Roboczych Ciężkich Laboratorium Dźwigów Ćwiczenie W6 Badania pasowego układu cięgnowego dźwigu Wersja robocza Tylko do użytku
PL B1. OSTROWSKI LESZEK, Gdańsk-Wrzeszcz, PL OSTROWSKI STANISŁAW, Gdańsk-Wrzeszcz, PL BUP 26/10
 PL 213042 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213042 (13) B1 (21) Numer zgłoszenia: 388240 (51) Int.Cl. F02D 15/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 213042 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213042 (13) B1 (21) Numer zgłoszenia: 388240 (51) Int.Cl. F02D 15/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
2011-05-17. Przekładnie łańcuchowe
 Przekładnie łańcuchowe 1 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch składa się z szeregu ogniw połączonych przegubowo.
Przekładnie łańcuchowe 1 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch składa się z szeregu ogniw połączonych przegubowo.
Wykorzystano materiały. Układ napędowy - podzespoły. Mechanizm różnicowy. opracowanie mgr inż. Ireneusz Kulczyk
 Wykorzystano materiały Układ napędowy - podzespoły Mechanizm różnicowy opracowanie mgr inż. Ireneusz Kulczyk Zespół Szkół Samochodowych w Bydgoszczy 2011-2012 Mechanizm różnicowy rozdziela równo moment
Wykorzystano materiały Układ napędowy - podzespoły Mechanizm różnicowy opracowanie mgr inż. Ireneusz Kulczyk Zespół Szkół Samochodowych w Bydgoszczy 2011-2012 Mechanizm różnicowy rozdziela równo moment
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
3. Wstępny dobór parametrów przekładni stałej
 4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
REDUKTORY TSA 031 MOTOREDUKTORY TSA E 031
 REDUKTORY TSA 1 MOTOREDUKTORY TSA E 1 Szanowni Państwo, Katalog handlowy który przedstawiamy inżynierom i technikom specjalistom z branży przemysłowej, przedstawia długoletnie doświadczenia w dziedzinie
REDUKTORY TSA 1 MOTOREDUKTORY TSA E 1 Szanowni Państwo, Katalog handlowy który przedstawiamy inżynierom i technikom specjalistom z branży przemysłowej, przedstawia długoletnie doświadczenia w dziedzinie
i = n Jest to wyjściowa prędkość obrotowa skalkulowana wg następującego wzoru: n2 =
 Spis treści 1. Dobór s.2 2. Przekładnie ślimakowe seria CM s.7 3. Zespoły przekładni ślimakowych seria CMM s.27 4. Przekładnie ślimakowe z wejściowym stopniem walcowym s. 37 1. Dobór Katalog ten zawiera
Spis treści 1. Dobór s.2 2. Przekładnie ślimakowe seria CM s.7 3. Zespoły przekładni ślimakowych seria CMM s.27 4. Przekładnie ślimakowe z wejściowym stopniem walcowym s. 37 1. Dobór Katalog ten zawiera
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Podstawy Konstrukcji Maszyn
 Podstawy Konstrukcji Maszyn Część Wykład nr. 1 1. Podstawowe prawo zazębienia I1 przełożenie kinematyczne 1 i 1 = = ω ω r r w w1 1 . Rozkład prędkości w zazębieniu 3 4 3. Zarys cykloidalny i ewolwentowy
Podstawy Konstrukcji Maszyn Część Wykład nr. 1 1. Podstawowe prawo zazębienia I1 przełożenie kinematyczne 1 i 1 = = ω ω r r w w1 1 . Rozkład prędkości w zazębieniu 3 4 3. Zarys cykloidalny i ewolwentowy
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/16
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
wszystkie elementy modelu płaskiego są w jednej płaszczyźnie, zwanej płaszczyzną modelu
 Schemat statyczny zawiera informacje, takie jak: geometria i połoŝenie tarcz (ciał sztywnych), połączenia tarcz z fundamentem i ze sobą, rodzaj, połoŝenie i wartość obciąŝeń czynnych. wszystkie elementy
Schemat statyczny zawiera informacje, takie jak: geometria i połoŝenie tarcz (ciał sztywnych), połączenia tarcz z fundamentem i ze sobą, rodzaj, połoŝenie i wartość obciąŝeń czynnych. wszystkie elementy
PL B1. ANIOŁ KAZIMIERZ PRZEDSIĘBIORSTWO PRODUKCYJNO-USŁUGOWO-HANDLOWE AKPIL, Pilzno, PL BUP 25/
 PL 212465 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212465 (13) B1 (21) Numer zgłoszenia: 379844 (51) Int.Cl. E01H 5/09 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 212465 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212465 (13) B1 (21) Numer zgłoszenia: 379844 (51) Int.Cl. E01H 5/09 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Pole temperatury - niestacjonarne (temperatura zależy od położenia elementu ciała oraz czasu)
") PODSAWY WYMIANY CIEPŁA. Postawowe pojęcia w wymianie ciepła Sposoby transportu ciepła: przewozenie konwekcja - swobona - wymuszona promieniowanie ransport ciepła w ciałach stałych obywa się na roze przewozenia.
PODSAWY WYMIANY CIEPŁA. Postawowe pojęcia w wymianie ciepła Sposoby transportu ciepła: przewozenie konwekcja - swobona - wymuszona promieniowanie ransport ciepła w ciałach stałych obywa się na roze przewozenia.
Konstrukcja i wymiary wybranych gwintów znormalizowanych
 Rozział 4 Konstrukcja i wymiary wybranych gwintów znormalizowanych Kazimierz Łyczko 4.1. y metryczne 4.1.1. y metryczne ISO ogólnego przeznaczenia zwykłe i robnozwojne y metryczne ISO ogólnego przeznaczenia
Rozział 4 Konstrukcja i wymiary wybranych gwintów znormalizowanych Kazimierz Łyczko 4.1. y metryczne 4.1.1. y metryczne ISO ogólnego przeznaczenia zwykłe i robnozwojne y metryczne ISO ogólnego przeznaczenia
(13) B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL
 B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ŁAŃCUCHOWE
 PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Przenośnik zgrzebłowy - obliczenia
 Przenośnik zgrzebłowy - obliczenia Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik zgrzebłowy - obliczenia Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (67) 0 7 B- parter p.6 konsultacje:
Przenośnik zgrzebłowy - obliczenia Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik zgrzebłowy - obliczenia Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (67) 0 7 B- parter p.6 konsultacje:
Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk. Człowiek- najlepsza inwestycja
 Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk WKPI Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego STOSOWANIE
Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk WKPI Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego STOSOWANIE
Instrukcja do laboratorium Materiały budowlane Ćwiczenie 12 IIBZ ĆWICZENIE 12 METALE POMIAR TWARDOŚCI METALI SPOSOBEM BRINELLA
 Instrukcja o laboratorium Materiały buowlane Ćwiczenie 1 ĆWICZENIE 1 METALE 1.1. POMIAR TWAROŚCI METALI SPOSOBEM BRINELLA Pomiar twarości sposobem Brinella polega na wciskaniu przez określony czas twarej
Instrukcja o laboratorium Materiały buowlane Ćwiczenie 1 ĆWICZENIE 1 METALE 1.1. POMIAR TWAROŚCI METALI SPOSOBEM BRINELLA Pomiar twarości sposobem Brinella polega na wciskaniu przez określony czas twarej
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
NAPĘDY MASZYN TECHNOLOGICZNYCH
 WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Instytut Technologii Mechanicznej ul. Piotrowo 3, 60-965 Poznań, tel. +48 61 665 2203, fax +48 61 665 2200 e-mail: office_mt@put.poznan.pl, www.put.poznan.pl MATERIAŁY
WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Instytut Technologii Mechanicznej ul. Piotrowo 3, 60-965 Poznań, tel. +48 61 665 2203, fax +48 61 665 2200 e-mail: office_mt@put.poznan.pl, www.put.poznan.pl MATERIAŁY
MarGear. Technika pomiarów uzębień
 3 MarGear. Technika pomiarów uzębień MarGear. GMX 275, GMX 400, GMX 600 MarGear. Rozwiązania branżowe 17-3 17-4 MarGear. Oprogramowanie 17-6 dajcie prospektu lub patrz WebCode 2266 na stronie internetowej
3 MarGear. Technika pomiarów uzębień MarGear. GMX 275, GMX 400, GMX 600 MarGear. Rozwiązania branżowe 17-3 17-4 MarGear. Oprogramowanie 17-6 dajcie prospektu lub patrz WebCode 2266 na stronie internetowej
Przekładnie zębate. Rozdział
 4 1 Rozdział Przekładnie zębate Na rysunkach 4.1 i 4.2 pokazano najczęściej stosowane przekładnie z kołami walcowymi z uzębieniem zewnętrznym i z kołami stożkowymi. Przełożenie tych przekładni zwykle nie
4 1 Rozdział Przekładnie zębate Na rysunkach 4.1 i 4.2 pokazano najczęściej stosowane przekładnie z kołami walcowymi z uzębieniem zewnętrznym i z kołami stożkowymi. Przełożenie tych przekładni zwykle nie
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do ćwiczeń projektowych. Zespół napędu liniowego - 1 Algorytm obliczeń wstępnych Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 2018
Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do ćwiczeń projektowych. Zespół napędu liniowego - 1 Algorytm obliczeń wstępnych Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 2018
Sprawdzenie stanów granicznych użytkowalności.
 MARCIN BRAŚ SGU Sprawzenie stanów granicznych użytkowalności. Wymiary belki: szerokość przekroju poprzecznego: b w := 35cm wysokość przekroju poprzecznego: h:= 70cm rozpiętość obliczeniowa przęsła: :=
MARCIN BRAŚ SGU Sprawzenie stanów granicznych użytkowalności. Wymiary belki: szerokość przekroju poprzecznego: b w := 35cm wysokość przekroju poprzecznego: h:= 70cm rozpiętość obliczeniowa przęsła: :=
ĆWICZENIE 41 WYZNACZANIE WSPÓŁCZYNNIKA ZAŁAMANIA ŚWIATŁA ZA POMOCĄ MIKROSKOPU. Kraków, luty 2004 - kwiecień 2015
 Józef Zapłotny, Maria Nowotny-Różańska Zakła Fizyki, Uniwersytet Rolniczy Do użytku wewnętrznego ĆWICZENIE 41 WYZNACZANIE WSPÓŁCZYNNIKA ZAŁAMANIA ŚWIATŁA ZA POMOCĄ MIKROSKOPU Kraków, luty 2004 - kwiecień
Józef Zapłotny, Maria Nowotny-Różańska Zakła Fizyki, Uniwersytet Rolniczy Do użytku wewnętrznego ĆWICZENIE 41 WYZNACZANIE WSPÓŁCZYNNIKA ZAŁAMANIA ŚWIATŁA ZA POMOCĄ MIKROSKOPU Kraków, luty 2004 - kwiecień
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 2 Sprzęgła Opracował: dr inż. Wiesław
Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 2 Sprzęgła Opracował: dr inż. Wiesław
Reduktor 2-stopniowy, walcowy.
 Reduktor 2-stopniowy, walcowy. 1. Dane wejściowe Projektowana przekładnia należy do grupy reduktorów walcowych. Funkcję sprzęgła pełni przekładnia pasowa na wejściu, która charakteryzuje się pewną elastycznością
Reduktor 2-stopniowy, walcowy. 1. Dane wejściowe Projektowana przekładnia należy do grupy reduktorów walcowych. Funkcję sprzęgła pełni przekładnia pasowa na wejściu, która charakteryzuje się pewną elastycznością
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 1 Sprzęgła Mechanizmy ruchu liniowego
Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 1 Sprzęgła Mechanizmy ruchu liniowego
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, ćwiczenia Podstawy konstrukcji maszyn Fundamentals of machine design Forma studiów: stacjonarne Poziom
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, ćwiczenia Podstawy konstrukcji maszyn Fundamentals of machine design Forma studiów: stacjonarne Poziom
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Nacinanie walcowych kół zębatych na frezarce obwiedniowej
 POLITECHNIKA POZNAŃSKA Instytut Technologii Mechanicznej Maszyny technologiczne laboratorium Nacinanie walcowych kół zębatych na frezarce obwiedniowej Opracował: dr inż. Krzysztof Netter www.netter.strefa.pl
POLITECHNIKA POZNAŃSKA Instytut Technologii Mechanicznej Maszyny technologiczne laboratorium Nacinanie walcowych kół zębatych na frezarce obwiedniowej Opracował: dr inż. Krzysztof Netter www.netter.strefa.pl
Pole temperatury - niestacjonarne (temperatura zależy od położenia elementu ciała oraz czasu)
") PODSAWY WYMIANY CIEPŁA. Postawowe pojęcia w wymianie ciepła Sposoby transportu ciepła: przewozenie konwekcja - swobona - wymuszona promieniowanie ransport ciepła w ciałach stałych obywa się na roze przewozenia.
PODSAWY WYMIANY CIEPŁA. Postawowe pojęcia w wymianie ciepła Sposoby transportu ciepła: przewozenie konwekcja - swobona - wymuszona promieniowanie ransport ciepła w ciałach stałych obywa się na roze przewozenia.