Podstawy Konstrukcji Urządzeń Precyzyjnych
|
|
|
- Władysława Pietrzyk
- 5 lat temu
- Przeglądów:
Transkrypt
1 Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 1 Przekładnie mechaniczne 2 Mechanizmy ruchu liniowego Opracował: dr inż. Wiesław Mościcki Instytut Mikromechaniki i Fotoniki Zakład Konstrukcji Urządzeń Precyzyjnych

2
3 - wprowadzenie służą do przeniesienia ruchu, z elementu (wałka) napędzającego na napędzany - bez zmiany średniej prędkości ruchu. Łączone wałki mogą być niewspółosiowe, zaś ich sprzęgnięcie może być trwałe lub okresowe. mogą też spełniać funkcje uzupełniające, jak: - przenoszenie napędu tylko w jednym kierunku, - ograniczenie wartości przenoszonego momentu, - łagodne włączanie napędu, itp.
4 Klasyfikacja sprzęgieł Sposób przeniesienia ruchu Sposób łączenia wałków Sposób włączania sprzęgła Realizowana funkcja Sztywne Rozłączne Samoczynne Rozruchowe Podatne Nierozłączne Sterowane Przeciążeniowe Cierne Kłowe Zasada działania Zapadkowe Magnetyczne
5 sztywne
6 sztywne tulejowe i płetwowe - łatwe i szybkie łączenie wałków, - eliminują obciążenia wzdłużne (a, b, c, e, f), - mogą pracować jako przeciążeniowe, oprócz e) - niezbędny luz promieniowy, gdy występuje mimośrodowość osi, a to wywoła kątowy luz martwy sprzęgła).
7 Sprzęgło tarczowe Umożliwia łączenie wałków o znacznej mimośrodowości e.
8 Sprzęgło tarczowe Z O 1 O 2 A, po zastosowaniu twierdzenia sinusów, wynika, że: e sin = sin ( 180 ) Błąd położenia wałka napędzanego jest równy: sin = 2 r 2 sin Przyjmując oczywiste uproszczenie, że r 2 r 1 otrzymamy: e r 1 1 e r 1 sin 1 gdzie: e równoległe przesunięcie osi wałków, r 1, 1 według rysunku
9 Sprzęgło tarczowe e r sin 1 e = 0,05 mm, r = 10 mm e/r = 0,005 rad 17 min. kątowych Maksymalny błąd kątowego położenia wałka biernego waha się w granicach: max e r zmieniając się sinusoidalnie podczas obrotu o kąt
10 Sprzęgło tarczowe - przełożenie sprzęgła jest zmienne w granicach jednego obrotu, - występuje kątowy luz martwy, jako efekt luzu między kołkiem (zabierakiem) a wycięciem w tarczy, tym mniejszy im większa jest wartość promienia r, - tarcie czopa i tarczy wywołuje znaczne straty energii oraz zużycie elementów. Zjawiska te są tym intensywniejsze im większe są: prędkość obrotowa, niewspółosiowość (mimośrodowość) wałków, współczynnik tarcia.
11 Sprzęgło tarczowe z kasowanym luzem Możliwe jest ograniczenie wymienionych wad przez odpowiednią konstrukcję sprzęgła, w tym kasowanie luzu martwego.
12 Sprzęgło Oldhama Dwie tarcze kształtowe i płytka pośrednia. Rowki po obu stronach płytki wzajemnie prostopadłe. - umożliwia sprzęganie wałków o małej niewspółosiowości, zapewniając teoretycznie stałe przełożenie, - niska sprawność sprzęgła (duże straty na tarcie), - stosowane w przyrządach precyzyjnych, w przekładniach mierniczych bez luzu obwodowego. D14 (04.06 Z13 (18.05)
13 Sprzęgło Oldhama O środek tarczy pośredniej, O 1 środek (oś) wałka czynnego, O 2 środek (oś) wałka biernego. O 1 O 2 = e Chwilowa prędkość liniowa punktu O względem O 1 jest równa: v = O O' = e cos
14 Sprzęgło Oldhama Wypadkowa prędkość obwodowa (liniowa) v punktu O : v cos 1 v = = 1 e 1 = v e Prędkość kątowa tego punktu względem chwilowego środka obrotu O jest równa: = v OO' = 2 v e = 2 1
15 Sprzęgło Oldhama Chwilowa prędkość liniowa v 2 punktu O względem osi obrotu wałka biernego O 2 : v 2 = v sin Prędkość kątowa 2 wałka biernego jest zatem równa: 2 2 = = = = 1 O2O' e sin e Prędkość kątowa 2 wałka napędzanego jest więc taka sama jak prędkość 1 wałka czynnego. v v sin v

16 Współczesne wykonanie sprzęgła Oldhama Sprzęgło Oldhama, przy dowolnym równoległym przesunięciu osi wałków, nie powoduje błędu położenia.


17 Pojedyncze sprzęgło Cardana
18 Pojedyncze sprzęgło Cardana - przełożenie jest zmienne w funkcji bieżącego kąta obrotu 1 wałka czynnego oraz zależy od kąta nachylenia wałków, - maksymalna wartość przełożenia równa jest i max = 1/cos, a wystąpi gdy kąt 1 = 90 0 oraz 1 = 270 0, 2 1 cos 1 sin cos - minimalna wartość przełożenia jest równa i min = cos, a wystąpi gdy kąt obrotu 1 = 0 0 oraz 1 = i = 1 2 = i max 1,004 1,015 1,035 1,064 1,155 1,305 1,414 i min 0,996 0,985 0,966 0,940 0,866 0,766 0,707 ( 2-1 ) max
19 Podwójne sprzęgło Cardana - maksymalny błąd kątowego położenia wałka biernego ( 2-1 ) 10 0, - niedogodności tego sprzęgła można usunąć stosując podwójne sprzęgło Cardana. Podwójne sprzęgło Cardana ma stałe przełożenie jeśli spełnione są następujące warunki: ramiona sprzęgieł na wałku pośrednim są równoległe, osie wałków zewnętrznych leżą w jednej płaszczyźnie, kąty wałków zewnętrznych z pośrednim są równe.
20 Cardana w mechanizmach precyzyjnych i drobnych w tradycyjnym wykonaniu (metalowe elementy) mają następujące właściwości: - są słabo smarowane, trudno uzyskać małe opory ruchu, - sprawność podwójnego sprzęgła Cardana maleje wraz ze wzrostem wartości kąta i wynosi: dla kąta = 0 0 sprawność = 0,96, dla kąta = 15 0 sprawność = 0,61 - zalecane prędkości do kilkudziesięciu obr/min, - nadają się do mechanizmów nastawczych

21 Sprzęgło Cardana Współczesne miniaturowe sprzęgła Cardana mają dużo lepsze parametry. Bezluzowe, mała masa, niewielki moment bezwładności, nie wymagają smarowania, trwałość do 10 8 obrotów.

22 Sprzęgło Cardana
23 podatne (sprężyste)
24 podatne (sprężyste) W sprzęgłach sprężystych moment jest przenoszony przez element podatny, który oddziela dynamicznie wałek bierny od czynnego. Dzięki temu uzyskuje się: - osłabienie uderzeniowych zmian momentu, - zmniejszenie drgań i hałasu. Zwykle są to sprzęgła sztywne skrętnie, natomiast są mało sztywne na zginanie i na rozciąganie.
25 Sprzęgło tarczowe podatne krążek z materiału tłumiącego drgania Może pracować tylko przy niewielkiej mimośrodowości wałków.

26 Sprzęgło membranowe - sztywne skrętnie, gdy membrana metalowa, - zapewnia dużą dokładność kinematyczną, - bezluzowe, o dużej sprawności, - wymagana współosiowość wałków.

27 Sprzęgło membranowe podwójne Jeśli tarcze membranowe są wykonane z materiału podatnego o dużym tarciu wewnętrznym to sprzęgło: - umożliwia nawet znaczne nachylenie kątowe wałków, - dobrze izoluje od drgań i hałasu.
28 tulejowe z nacięciami prostymi - prosta konstrukcja, łatwe wykonanie, - stosowane materiały: stal, dural, tworzywa sztuczne, - mała sztywność skrętna, - dobra kompensacja niedokładności osiowego, promieniowego (niewspółosiowości) i kątowego położenia wałków,


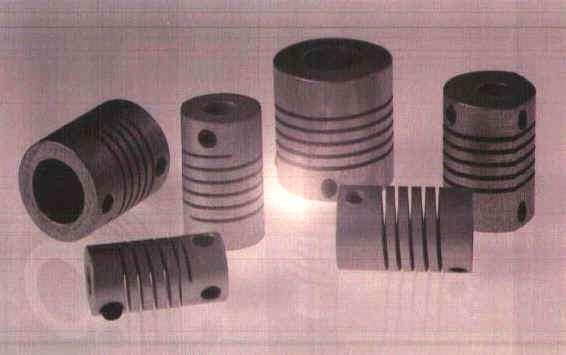
29 tulejowe z nacięciami śrubowymi

30 Sprzęgło tulejowe z nacięciem śrubowym

 i kątowego położenia wałków, -")
31 Sprzęgło mieszkowe - duża sztywność skrętna, - zapewnia dużą dokładność kinematyczną, - dobra kompensacja niedokładności osiowego, promieniowego (niewspółosiowości) i kątowego położenia wałków, - bezluzowe, o dużej sprawności.

32 Sprzęgło mieszkowe
33 Miniaturowe sprzęgła mieszkowe Właściwości Przykładowe parametry sprzęgieł mieszkowych (na podstawie badań w ZKUP)

34 Sprzęgło mieszkowe Stopień spełnienia wymagania: 1 słabo, 2 średnio, 3 najlepiej


35 Wałek giętki Umożliwia sprzęgnięcie wałków: - dowolnie względem siebie usytuowanych, - oddalonych od siebie nawet o kilka metrów, Przy ruchu rewersyjnym wykazuje znaczny kątowy luz martwy.
36 sprężynowe - nie tłumi drgań - tłumi drgania, - zalecane do małych prędkości obrotowych
37 Sprzęgło sprężynowe samozaciskowe 1 2 Średnica wewnętrzna sprężyny jest nieco mniejsza od średnicy wałka 2. Jest to sprzęgło jednokierunkowego działania.
38 przeciążeniowe
39 przeciążeniowe przeciążeniowe służą do ochrony elementów napędu lub urządzenia napędzającego przed uszkodzeniem na skutek zwiększenia momentu obciążenia ponad dopuszczalną wartość. Najczęściej są to sprzęgła cierne. Rzadziej jako przeciążeniowe stosowane są sprzęgła kształtowo-cierne, takie jak np. sprzęgło kłowe czy sprzęgło kulkowe promieniowe.
40 przeciążeniowe cierne płaskie Konstrukcja
41 przeciążeniowe cierne płaskie Maksymalny moment jaki przenosi sprzęgło jest równy: M = 0,5 F D s gdzie: F siła docisku sprężyny, D s średnia średnica powierzchni ciernych, współczynnik tarcia na powierzchniach ciernych
42 przeciążeniowe cierne Sposoby powiększenia wartości przenoszonego momentu: - zwiększanie średnicy D s jest ograniczone wzrostem momentu bezwładności sprzęgła, co może być istotne przy ruszaniu i zatrzymywaniu mechanizmu, - zwiększanie wartości siły docisku F jest ograniczone względami wytrzymałościowymi, gdyż na powierzchniach ciernych naciski p nie mogą być większe niż naciski dopuszczalne p dop. p = Fn S p dop gdzie: F n siła normalna do powierzchni, S pole powierzchni styku tarcz
43 przeciążeniowe cierne ze stożkowymi tarczami Moment sprzęgła można zwiększyć stosując tarcze stożkowe, gdyż wtedy: M 1 = 0,5 F sin D s = M sin Wartość kąta nie może być zbyt mała, aby nie doszło do zakleszczenia sprzęgła. = arctg

44 Sprzęgło przeciążeniowe cierne wielopłytkowe Znaczne powiększenie momentu sprzęgła można uzyskać przez zastosowanie sprzęgła wielopłytkowego. Jeśli k oznacza liczbę par powierzchni trących to moment sprzęgła jest równy: M w = 0,5 F D s k gdzie: F siła docisku tarcz sprzęgła, - współczynnik tarcia, D s - średnia średnica sprzęgła

45 Sprzęgło przeciążeniowe cierne


46 Sprzęgło przeciążeniowe cierne
47 Sprzęgło przeciążeniowe kulkowe 1, 7 tarcze, 2 tarcza pośrednia, 3 sprężyna, 4 - kulka, 5 kołek zabierający, 6 tuleja podatna
48 Sprzęgło przeciążeniowe kłowe Maksymalny moment jaki może przenieść sprzęgło: M max = F r ctg śr ( ) - kąt pochylenia ząbka, - kąt tarcia, = arctg, gdzie - współczynnik tarcia między ząbkami
49 Sprzęgło przeciążeniowe kłowe Zalecenia: - wysokość zębów: b = (3 5) t - podziałka uzębienia: t = D/z, z liczba ząbków. Przy małych gabarytach przenoszą stosunkowo duże obciążenia (gdyż rozkłada się ono na dużą liczbę ząbków). Do poprawnej współpracy zębów wymagane jest zachowanie współosiowości sprzęganych wałków.
50 Sprzęgło kłowe odmiany a) sztywne, b), c), d) przeciążeniowe symetrycznie w obie strony, e) sztywne w jednym kierunku, przeciążeniowe w drugim (może być sprzęgłem jednokierunkowego działania)
51 Sprzęgło kłowe podatne kłowe z dużym luzem obwodowym z elementami podatnymi na odkształcenie: a) smukłe występy z tworzywa sztucznego b) kulki z gumy lub z tworzywa sztucznego

52 Sprzęgło kłowe podatne Sprzęgło kłowe bez luzu obwodowego z elementem podatnym na odkształcenie w postaci koła zębatego z tworzywa sztucznego
53 elektromagnetyczne
54 Sprzęgło elektromagnetyczne cierne Na wałku 1 ułożyskowany jest korpus 2 wykonany z materiału ferromagnetycznego z umieszczoną w nim cewką 3. Jest ona zasilana przez niewidoczne na rysunku przewody dołączone do pierścieni 4, do których dociskane są szczotki doprowadzające prąd. Elektromagnes tworzą: cewka 3, korpus 2 i zwora w postaci ruchomego pierścienia 5. Jego wzbudzenie powoduje dociśnięcie pierścienia 5 do korpusu 2 poprzez wykładziny cierne 6 i sprzęgnięcie członu napędzanego 9 (wirnika dmuchawy) z napędzającym wałkiem 1. Po wyłączeniu zasilania cewki, sprężyna 7 odsuwa pierścień 5 od korpusu 2 i człon 9 przestaje być napędzany.
55 Sprzęgło przeciążeniowe elektromagnetyczne 1, wałek czynny, 2 wałek bierny, 3 tarcza z materiału ferromagnetycznego, 4 uzwojenie tarczy 3, 5 wykładzina cierna tarczy 3, 6 tarcza ruchoma, 7 sprężyna zwrotna, 8 ślizgacze
56 jednokierunkowe
57 jednokierunkowe Służą do przenoszenia momentu z wałka czynnego na bierny tylko w jednym kierunku. Samoczynne rozłączenie sprzęgła następuje, gdy: - zmieni się kierunek ruchu, - wałek bierny zacznie obracać się szybciej niż wałek czynny. Najczęściej spotykane w urządzeniach mechatronicznych sprzęgła jednokierunkowe to sprzęgła: - cierne, - zapadkowe, - kłowe.
58 Sprzęgło jednokierunkowe cierne typu wolne koło 1 tuleja, 2 krzywka, 3 wałeczek, 4 sprężyna
59 Sprzęgło jednokierunkowe cierne - zapewnia natychmiastowe sprzęgnięcie, - brak poślizgu przy sprzęganiu wystąpi, gdy 2, - warunek samoczynnego odklinowania sprzęgła, gdy zaniknie moment czynny (moment napędzający M = 0): gdzie f 1,2 współczynniki tarcia tocznego, r promień wałeczka f1 + f2 sin r
60 jednokierunkowe cierne Zalety: - sprzęgają w dowolnym położeniu kątowym wałków, - bardzo mały kątowy luz martwy, prosta konstrukcja, - małe opory ruchu jałowego. Wady: - konieczne dokładne wykonanie oraz dobre, a więc także i drogie, materiały (stal), - nie nadają się do sprzęgania członów o dużym momencie bezwładności, - ograniczona prędkość kątowa.
61 Sprzęgło jednokierunkowe cierne sprężynowe Sprężyna zaciska się na wałku 1 po przyłożeniu momentu działającego w kierunku nawinięcia zwojów sprężyny (zgodnie z ruchem wskazówek zegara). Sprężyna jest szlifowana na średnicy wewnętrznej (b).
62 Sprzęgło jednokierunkowe zapadkowe 1 wałek czynny, 2 koło zapadkowe, 3 koło zębate, 4 zapadka, 5, 7 sprężyny, 6 - przeciwzapadka

63 Sprzęgło jednokierunkowe zapadkowe 0 Kierunek siły P powinien przechodzić przez oś zapadki. Jeśli kąt > możliwe samoczynne wykleszczenie. Gdy kąt < 0 niepożądany wzrost wartości siły P.
64 Sprzęgło jednokierunkowe zapadkowe Zalety: - prosta konstrukcja, łatwe wykonanie, - pewność działania, Wady: - sprzęganie tylko w określonych położeniach, - duży luz martwy przy przejściu z ruchu jałowego do ruchu roboczego, - niewielka wytrzymałość węzła koło zapadkowe-zapadka, - hałaśliwość przy biegu jałowym.
65 Sprzęgło jednokierunkowe kłowe - kąt pochylenia ząbka, F siła docisku tarcz, r śr średni promień tarcz sprzęgła kłowego
66 Sprzęgło rozruchowe
67 Sprzęgło rozruchowe Służą do oddzielenia członu czynnego, np. silnika elektrycznego, od członu biernego podczas uruchamiania mechanizmu. Zapewniają sprzęgnięcie tych członów dopiero po osiągnięciu przez człon czynny ustalonej prędkości obrotowej. Samoczynnie rozłączają człony, jeśli ich prędkość obrotowa zmniejszy się poniżej ustalonej.
68 Sprzęgło rozruchowe 1 wałek napędzający, 2 listwa, 3 kołek, 4 wahnik, 5 nakładka cierna, 6 sprężyna, 7 bęben napędzany, S siła sprężyny, Q siła odśrodkowa.
69 Sprzęgło rozruchowe Sprzęgnięcie nastąpi wtedy, gdy moment obciążenia członu biernego M zostanie zrównoważony przez moment tarcia nakładek o bęben - M t, czyli M t M. M t = N D Siłę N wyznacza się z równania równowagi: N (a + b) = ( Q S) c

70 Porównanie

71 porównanie dokładności I e<0,005, <0,5 ; II e=0,2; III - =0,5 0 ; IV obciążenie M=0,1Nm
72 z pierścieniem zębatym ROTEX

73 - przykłady ROTEX
74 Mechanizmy ruchu liniowego D15 (cz wt) Mechanizmy
75 Mechanizmy ruchu liniowego 1. Prowadnice liniowe 2. Mechanizmy śrubowe (gwintowe) 3. Bezgwintowy mechanizm śrubowy Uhinga Mechanizmy
76 Prowadnice ślizgowe Prowadnica to zespół elementów, współpracujących ze sobą, które umożliwiają zmianę położenia członu prowadzonego względem prowadzącego w określonym kierunku zwykle jest to ruch liniowy. Klasyfikacja prowadnic: w zależności od rodzaju tarcia między elementami: prowadnice ślizgowe, toczne lub z tarciem wewnętrznym, w zależności od sposobu zapewnienie względnego położenia elementu prowadzonego i prowadnicy: z zamknięciem kształtowym lub z zamknięciem siłowym Prowadnice liniowe
77 Prowadnice ślizgowe w zależności od kształtu powierzchni prowadzących: prowadnice walcowe (a, b, c) lub pryzmatyczne (d, e) w zależności od sposobu zapewnienia względnego położenia elementu prowadzonego i prowadnicy: z zamknięciem kształtowym (a, b, e) lub z zamknięciem siłowym (c, d) Prowadnice liniowe
78 Prowadnica walcowa przypadek, gdy e e gr Siła P równoległa do osi prowadnicy działa na ramieniu e < e gr. Występuje styk prowadnicy wzdłuż tworzącej, po jednej stronie otworu. Prowadnice liniowe
79 Prowadnica walcowa przypadek, gdy e e gr Siła użyteczna P u jest równa: P u = P Q Sprawność prowadnicy, gdy e < e gr : = P u P = P Q P = 1 Dla stałej wartości współczynnika tarcia sprawność prowadnicy jest stała aż do e = e gr. Ramię siły P, wymuszającej ruch prowadnicy, ma wartość e = e gr wtedy, gdy N 1 = 0, czyli gdy ustanie styk w punkcie A. e gr = Q P x + Q P d 2 Prowadnice liniowe
80 Prowadnica walcowa przypadek, gdy e > e gr Wystąpi styk w punktach A i B po przeciwnych stronach prowadnicy. Kierunki działania reakcji R 1 oraz R 2 przecinają się w pkt. S o współrzędnej względem osi prowadnicy równej: e s l = 2 Sprawność prowadnicy będzie równa zeru, gdy siła P będzie działała na ramieniu o długości e = e min. e min = e s + Q P x l d 2 Prowadnice liniowe
81 Sprawność prowadnicy walcowej Teoretyczny wykres sprawności prowadnicy walcowej ( = const., P = const. P ' P u = = 1 e e min Prowadnice liniowe


82 Prowadnica walcowa Siła P przecina oś prowadnicy pod kątem Prowadnice liniowe
83 Prowadnice ślizgowe Przykłady Prowadnice rurowe bez zabezpieczenia przed obrotem: a) z ciernym ustaleniem położenia, b) z ograniczeniem ruchu przez zawalcowanie Prowadnice elementów wykonanych z blachy z wykorzystaniem nitów Prowadnice liniowe
84 Prowadnice ślizgowe Przykłady Prowadnice pryzmatyczne: a) typu jaskółczy ogon, b) z regulacją luzu bocznego przy montażu, c) bez regulacji luzu bocznego Prowadnice liniowe
85 Prowadnice ślizgowe Przykłady Zabezpieczenie elementów prowadzonych przed obrotem za pomocą: a) kołka, b) wpustu pryzmatycznego lub czółenkowego, c) wkręta zakończonego czopem Prowadnice liniowe
86 Prowadnice toczne ze względu na rodzaj elementów tocznych: rolkowe (a, b) oraz ze swobodnymi elementami tocznymi (c, d) w zależności od sposobu zapewnienia względnego położenia elementu prowadzonego i prowadnicy: z zamknięciem kształtowym (a, d) lub z zamknięciem siłowym (b, c) Prowadnice liniowe
87 Prowadnice toczne Środek masy znajduje się między osiami rolek, czyli b < l oraz siła T = T 1 +T 2 Do wyznaczenia sił T 1 i T 2 napiszemy równania równowagi momentów względem osi obrotu rolki 1 i rolki 2. M t 1 5 = 0, 5 T1 D = R1 f + 0, R1 M t 2 5 = 0, 5 T2 D = R2 f + 0, R2 ' d ' d gdzie: obliczeniowy współczynnik tarcia ślizgowego lub, w przypadku łożyskowania tocznego, obliczeniowy współczynnik tarcia tocznego zredukowany do średnicy czopa, f współczynnik tarcia tocznego rolki po bieżni, Q ciężar wózka Prowadnice liniowe
88 Prowadnice toczne Ostatecznie siła T, czyli suma sił tarcia T 1 i T 2, jest równa: T = T 1 + T 2 = (R 1 + R 2 ) ' d + D 2f = Q ' d + D 2f gdzie: obliczeniowy współczynnik tarcia ślizgowego lub, w przypadku łożyskowania tocznego, obliczeniowy współczynnik tarcia tocznego zredukowany do średnicy czopa, f współczynnik tarcia tocznego rolki po bieżni, Q ciężar wózka Jeśli rolki są łożyskowane ślizgowo, to d >> 2f. Wtedy siła oporów ruchu T jest, w przybliżeniu, równa: T = Q ' d + D 2f = Q ' d D Prowadnice liniowe
89 Prowadnice toczne Prowadzenie walca na rolkach, w postaci łożysk tocznych, z kasowaniem luzu w prowadnicy 1 łożysko toczne (rolka), 2 nakrętka mocująca, 3 wałek mimośrodowy, 4 prowadzony walec Prowadnice liniowe
90 Prowadnice liniowe toczne Prowadzenie na rolkach wózka maszyny do pisania: 1 rolki stożkowe, 2 i 4 prowadnice walcowe, 3 rolka walcowa zapobiegająca obrotowi wokół osi prowadnicy 2 Prowadnice liniowe
91 Prowadnice liniowe toczne Prowadnice stolika przyrządu pomiarowego ze swobodnymi elementami tocznymi: a) z luzem poprzecznym, b) bez luzu poprzecznego Prowadnice liniowe
92 Prowadnice z zamkniętym obiegiem kulek 1 bieżnia w pierścieniu zewnętrznym, 2 kulka, 3 prowadnica kulek Prowadnice liniowe


93 Prowadnice liniowe toczne Prowadnice liniowe

94 Miniaturowe prowadnice liniowe Prowadnice liniowe


95 Prowadnice liniowe Prowadnice liniowe
96 Prowadnice liniowe sprężyste Prowadnica sprężysta na dwóch sprężynach a) trapezowych, b) płaskich e = 2 F l 960 E 2 5 J 2 Podstawiając zalecane otrzymamy: f l 0,02 oraz wiedząc, że f = 3 F l 24EJ e = 0,6 f l 2 E moduł sprężystości wzdłużnej, J moment bezwładności przekroju sprężyny, l długość sprężyny Prowadnice liniowe
97 Prowadnice liniowe sprężyste Prowadnica sprężysta na płaskich sprężynach perforowanych (membranach) Membrany do prowadnic: a) nacięte spiralnie, b) nacięte współśrodkowo, c) nacięte promieniowo, (a, b, c utwierdzone na obwodzie, pręt prowadzony w środku), d) utwierdzone na prętach 1, pręt prowadzony w środku, e) utwierdzone na prętach 1, prowadzone pręty 2 Prowadnice liniowe
98 Prowadnice sprężyste Prowadnica sprężysta: a) na dwóch membranach, b) na sprężystym mieszku Właściwości prowadnic sprężystych: - brak typowych zjawisk związanych z tarciem, takich jak: zużycie, zmienność oporów ruchu, wrażliwość na wpływ środowiska, brak smarowania, - ograniczony zakres ruchu prowadzonego elementu, - nieprostoliniowość przesunięcia, - zależność siły napędzającej od przemieszczenia, - skłonność do drgań Prowadnice liniowe
99 Mechanizmy gwintowe D15 (cz wt) Mechanizmy ruchu liniowego
100 Mechanizmy gwintowe proste s = P 2 c P skok gwintu, s liniowe przemieszczenie nakrętki 3, - kąt obrotu śruby 2 - przy dobrym smarowaniu sprawność około 30%, - czułość, tj. przesunięcie nakrętki s odpowiadające najmniejszemu możliwemu obrotowi śruby, zależy od podziałki (skoku) P gwintu Mechanizmy ruchu liniowego
101 Mechanizm gwintowy różnicowy k = P 2 P1 P 3 1 ruch zgrubny ( makro ), 2 ruch dokładny ( mikro ), k iloraz czułości ruchu mikro do czułości ruchu makro Czułość mechanizmu mikro jest k razy większa niż czułość mechanizmu makro Mechanizmy ruchu liniowego
102 Mechanizmy gwintowe proste Luz martwy mechanizmu = 2 l P l luz wzdłużny mechanizmu gwintowego (niedokładność wykonania), błąd kąta obrotu śruby przy ruchu zwrotnym, P skok gwintu Konieczne kasowanie luzu wzdłużnego! Mechanizmy ruchu liniowego
103 Mechanizmy gwintowe proste Kasowanie luzu docisk osiowy docisk promieniowy Mechanizmy ruchu liniowego
104 Mechanizmy gwintowe proste Moment tarcia (oporów ruchu) M t Q ' = arctg cos 2 M = 0,5 Q d t 2 tg( + ' ) = P arctg d 2 d 2 średnia średnica gwintu, pozorny kąt tarcia, - kąt pochylenia linii śrubowej gwintu, - kąta zarysu gwintu, - współczynnik tarcia materiału śruby i nakrętki Mechanizmy ruchu liniowego
105 Mechanizmy gwintowe ustawcze tg = P 2 R - niestałe przełożenie mechanizmu, - wpływ niewspółosiowości osi obrotu i środka tarczy 3 Mechanizmy ruchu liniowego
106 Mechanizmy gwintowe ustawcze s = P 2 tg Przełożenie i dokładność ustawienia są tym większe im mniejszy jest kąt nachylenia tworzącej stożka. Mechanizmy ruchu liniowego
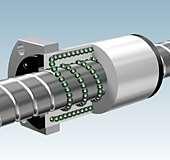
107 Mechanizmy śrubowe toczne Mechanizmy ruchu liniowego


108 Mechanizmy śrubowe toczne Śruba i nakrętka mają specjalny zarys gwintu. Współpracują ze sobą poprzez pośrednie elementy toczne takie jak: kulki, wałeczki gwintowane lub z rowkami o zarysie trójkątnym. Mechanizmy ruchu liniowego
109 Mechanizmy śrubowe toczne Zasada działania Przy dobrym smarowaniu sprawność mechanizmów gwintowych tocznych jest większa niż 80%. Mechanizmy ruchu liniowego
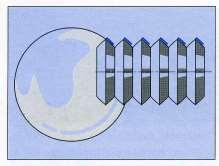
110 Mechanizmy śrubowe toczne Sposoby realizacji ruchu powrotnego kulek Mechanizmy ruchu liniowego


111 Mechanizmy śrubowe toczne Sposoby realizacji ruchu powrotnego kulek Mechanizmy ruchu liniowego


112 Mechanizmy śrubowe toczne Sposoby realizacji ruchu powrotnego kulek Mechanizmy ruchu liniowego


113 Mechanizmy śrubowe toczne Sposoby realizacji ruchu powrotnego kulek Mechanizmy ruchu liniowego
114 Mechanizmy śrubowe toczne Sposoby realizacji napięcia wstępnego Mechanizmy ruchu liniowego

115 Mechanizmy śrubowe toczne Sposoby realizacji napięcia wstępnego Mechanizmy ruchu liniowego

116 Śruby toczne Przykłady mechanizmów Mechanizmy ruchu liniowego

117 Śruby toczne Przykłady mechanizmów Mechanizmy ruchu liniowego
118 Śruby toczne Jeśli mechanizm gwintowy jest obciążony osiową siłą F, to opory ruchu między śrubą i nakrętką określone są przez maksymalny moment tarcia M, w Nm, według równania: M = F 2000 P p gdzie: P skok (podziałka) gwintu w [mm], p sprawność praktyczna mechanizmu gwintowego obliczona z zależności p = 0,9, w której sprawność obliczeniowa Mechanizmy ruchu liniowego
119 Śruby toczne Sprawność obliczeniową wyznacza się ze wzoru: = ,018 d P o d o nominalna średnica gwintu Sprawność praktyczna mechanizmów gwintowych tocznych dochodzi lub nawet nieco przekracza 90%. W mechanizmach tych nie występuje zjawisko stick slip, tj. skokowa zmiana oporów ruchu przy ruszaniu ze spoczynku lub przy małych przesunięciach. Mechanizmy ruchu liniowego


120 Śruby toczne Przykłady mechanizmów Mechanizmy ruchu liniowego
121 Śruby toczne planetarne Planetary roller screws Mechanizmy ruchu liniowego


122 Śruby toczne planetarne Mechanizmy ruchu liniowego


123 Śruby toczne planetarne Mechanizmy ruchu liniowego

124 Śruby toczne planetarne Mechanizmy ruchu liniowego
125 Śruby toczne planetarne duża powierzchnia styku elementów, duża nośność i trwałość mechanizmu, praca przy dużej prędkości obrotowej, przy zmianie kierunku ruchu moment napięcia wstępnego pozostaje niezmienny, płynny ruch, odporność na wstrząsy, wyjątkowa niezawodność, możliwa praca w niskiej temperaturze, przy słabym smarowaniu, możliwe wykonania specjalne, np. gwint lewozwojny Mechanizmy ruchu liniowego
126 Śruby toczne z powrotnym ruchem elementów Recirculating roller screws Mechanizmy ruchu liniowego

127 Śruby toczne recyrkulacyjne Mechanizmy ruchu liniowego

128 Śruby toczne recyrkulacyjne Mechanizmy ruchu liniowego
129 Śruby toczne recyrkulacyjne Sprawność obliczeniową wyznacza się ze wzoru: 1 = d0 1 + P gdzie: - współczynnik tarcia przyjmuje następujące wartości: = 0,01 jeśli kąt pochylenia zwojów 7 0, = (0,007-0,04) jeśli kąt jest większy od > 7 0 Sprawność praktyczna mechanizmów gwintowych z wałeczkami jest nieco mniejsza niż mechanizmów kulkowych i nie przekracza 90%. Mechanizmy ruchu liniowego

130 Śruby toczne recyrkulacyjne - możliwy bardzo mały skok gwintu (1 mm), - duża rozdzielczość ruchu liniowego, - wymagany mały moment napędzający, - duża nośność, trwałość i niezawodność, 1- śruba, 2 nakrętka, 3 wałeczek, 4 pierścień, 5 krzywka, 6 kanałek powrotny Mechanizmy ruchu liniowego




131 Mechanizmy śrubowe toczne - zastosowania Mechanizmy ruchu liniowego
132 Bezgwintowy mechanizm śrubowy Uhinga Mechanizmy ruchu liniowego

133 Mechanizm śrubowy bezgwintowy Mechanizmy ruchu liniowego


134 Mechanizm Uhinga Mechanizmy ruchu liniowego



135 Mechanizm Uhinga Mechanizmy ruchu liniowego


136 Mechanizm Uhinga Mechanizmy ruchu liniowego
137 Zapraszam na egzamin Mechanizmy ruchu liniowego
138 Ciekawe linki Mechanizmy ruchu liniowego

139 Zapraszam na egzamin Mechanizmy ruchu liniowego
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 1 Przekładnie mechaniczne 2 Sprzęgła
Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 1 Przekładnie mechaniczne 2 Sprzęgła
W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego
 służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego") SPRZĘGŁA W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego bez zmiany jego wartości i kierunku. W ogólnym
SPRZĘGŁA W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego bez zmiany jego wartości i kierunku. W ogólnym
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
1. Obliczenia wytrzymałościowe elementów maszyn przy obciążeniu zmiennym PRZEDMOWA 11
 SPIS TREŚCI 1. Obliczenia wytrzymałościowe elementów maszyn przy obciążeniu zmiennym PRZEDMOWA 11 1. ZARYS DYNAMIKI MASZYN 13 1.1. Charakterystyka ogólna 13 1.2. Drgania mechaniczne 17 1.2.1. Pojęcia podstawowe
SPIS TREŚCI 1. Obliczenia wytrzymałościowe elementów maszyn przy obciążeniu zmiennym PRZEDMOWA 11 1. ZARYS DYNAMIKI MASZYN 13 1.1. Charakterystyka ogólna 13 1.2. Drgania mechaniczne 17 1.2.1. Pojęcia podstawowe
SPRZĘGŁA MIMOŚRODOWE INKOMA TYP KWK Inkocross
 - 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe
- 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe
Dla nowoczesnych zespołów napędowych TOOLFLEX. Sprzęgło mieszkowe TOOLFLEX RADEX-NC ROTEX GS
 przęgło mieszkowe ROTEX G TOOLFLEX RADEX-NC 119 przęgło mieszkowe przęgło sprawdziło się już wielokrotnie (sprzęgło mieszkowe). Najbardziej istotnymi cechami są: dobra kompensacja odchyłek (osiowej, promieniowej
przęgło mieszkowe ROTEX G TOOLFLEX RADEX-NC 119 przęgło mieszkowe przęgło sprawdziło się już wielokrotnie (sprzęgło mieszkowe). Najbardziej istotnymi cechami są: dobra kompensacja odchyłek (osiowej, promieniowej
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 21/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/16
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
Hamulce elektromagnetyczne. EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie
 Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do ćwiczeń projektowych. Zespół napędu liniowego - 1 Algorytm obliczeń wstępnych Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 2018
Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do ćwiczeń projektowych. Zespół napędu liniowego - 1 Algorytm obliczeń wstępnych Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 2018
PL 210777 B1. UNIWERSYTET PRZYRODNICZY W LUBLINIE, Lublin, PL 21.01.2008 BUP 02/08 29.02.2012 WUP 02/12. ZBIGNIEW OSZCZAK, Lublin, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210777 (13) B1 (21) Numer zgłoszenia: 380160 (51) Int.Cl. F16D 13/75 (2006.01) F16C 1/22 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210777 (13) B1 (21) Numer zgłoszenia: 380160 (51) Int.Cl. F16D 13/75 (2006.01) F16C 1/22 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
PL B1. KRUCZEK MAREK, Dębica, PL BUP 21/07. WIESŁAW GALEND, Tarnobrzeg, PL GUSTAW JADCZYK, Koniecpol, PL MAREK KRUCZEK, Dębica, PL
 PL 212309 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212309 (13) B1 (21) Numer zgłoszenia: 379363 (51) Int.Cl. B62M 7/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 212309 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 212309 (13) B1 (21) Numer zgłoszenia: 379363 (51) Int.Cl. B62M 7/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Podstawy Konstrukcji Maszyn. Połączenia gwintowe
 Podstawy Konstrukcji Maszyn Połączenia gwintowe Wprowadzenie Połączenia gwintowe są połączeniami kształtowymi rozłącznymi najczęściej stosowanymi w budowie maszyn. Zasadniczym elementem połączenia gwintowego
Podstawy Konstrukcji Maszyn Połączenia gwintowe Wprowadzenie Połączenia gwintowe są połączeniami kształtowymi rozłącznymi najczęściej stosowanymi w budowie maszyn. Zasadniczym elementem połączenia gwintowego
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Instytut Konstrukcji Maszyn, Instytut Pojazdów Szynowych 1
 1. SPRZĘGŁO TULEJOWE. Sprawdzić nośność sprzęgła z uwagi na naciski powierzchniowe w rowkach wpustowych. Przyjąć, że p dop = 60 Pa. Zaproponować sposób zabezpieczenia tulei przed przesuwaniem się wzdłuż
1. SPRZĘGŁO TULEJOWE. Sprawdzić nośność sprzęgła z uwagi na naciski powierzchniowe w rowkach wpustowych. Przyjąć, że p dop = 60 Pa. Zaproponować sposób zabezpieczenia tulei przed przesuwaniem się wzdłuż
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
3. Wstępny dobór parametrów przekładni stałej
 4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
(13) B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL
 B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
ŁĄCZENIA KSZTAŁTOWE POŁĄ TOWE. Klasyfikacja połączeń maszynowych POŁĄCZENIA. rozłączne. nierozłączne. siły przyczepności siły tarcia.
 POŁĄ ŁĄCZENIA KSZTAŁTOWE TOWE Klasyfikacja połączeń maszynowych POŁĄCZENIA nierozłączne rozłączne siły spójności siły tarcia siły przyczepności siły tarcia siły kształtu spawane zgrzewane lutowane zawalcowane
POŁĄ ŁĄCZENIA KSZTAŁTOWE TOWE Klasyfikacja połączeń maszynowych POŁĄCZENIA nierozłączne rozłączne siły spójności siły tarcia siły przyczepności siły tarcia siły kształtu spawane zgrzewane lutowane zawalcowane
Bezluzowe sprzęgła przeciążeniowe SAFEMAX
 Bezluzowe sprzęgła SAFEMAX Spis treści Bezluzowe sprzęgła SAFEMAX Str. Opis 73 Cechy 74 Symbol 74 Bezluzowe sprzęgła SAFEMAX SIT GLS/SG/N 75 Bezluzowe sprzęgła SAFEMAX SIT GLS/SG/N ze sprzęgłami TRASCO
Bezluzowe sprzęgła SAFEMAX Spis treści Bezluzowe sprzęgła SAFEMAX Str. Opis 73 Cechy 74 Symbol 74 Bezluzowe sprzęgła SAFEMAX SIT GLS/SG/N 75 Bezluzowe sprzęgła SAFEMAX SIT GLS/SG/N ze sprzęgłami TRASCO
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Koła stożkowe o zębach skośnych i krzywoliniowych oraz odpowiadające im zastępcze koła walcowe wytrzymałościowo równoważne
 Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
(73) Uprawniony z patentu: (43) Zgłoszenie ogłoszono: Wyższa Szkoła Inżynierska, Koszalin, PL
 Uprawniony z patentu: (43) Zgłoszenie ogłoszono: Wyższa Szkoła Inżynierska, Koszalin, PL") RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)164102 (13) B1 (21) N um er zgłoszenia: 288495 Urząd Patentowy (22) D ata zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)164102 (13) B1 (21) N um er zgłoszenia: 288495 Urząd Patentowy (22) D ata zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
(13) B1 F16H 1/16 F16H 57/12
 B1 F16H 1/16 F16H 57/12") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164105 (13) B1 (21) Numer zgłoszenia: 288497 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164105 (13) B1 (21) Numer zgłoszenia: 288497 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
(19) PL (11) 181278 (13) B3 (12) OPIS PATENTOWY PL 181278 B3. (54) Trochoidalna dwumimośrodowa przekładnia kulkowa F16H 1/32
 PL (11) 181278 (13) B3 (12) OPIS PATENTOWY PL 181278 B3. (54) Trochoidalna dwumimośrodowa przekładnia kulkowa F16H 1/32") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (2 1) Numer zgłoszenia: 317553 (22) Data zgłoszenia: 18.12.1996 (61) Patent dodatkowy do patentu: 174534, 08.07.1994
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (2 1) Numer zgłoszenia: 317553 (22) Data zgłoszenia: 18.12.1996 (61) Patent dodatkowy do patentu: 174534, 08.07.1994
Analiza wpływu tarcia na reakcje w parach kinematycznych i sprawność i mechanizmów.
 Automatyka i Robotyka. Podstawy modelowania i syntezy mechanizmów arcie w parach kinematycznych mechanizmów 1 ARCIE W PARACH KINEMAYCZNYCH MECHANIZMÓW Analiza wpływu tarcia na reakcje w parach kinematycznych
Automatyka i Robotyka. Podstawy modelowania i syntezy mechanizmów arcie w parach kinematycznych mechanizmów 1 ARCIE W PARACH KINEMAYCZNYCH MECHANIZMÓW Analiza wpływu tarcia na reakcje w parach kinematycznych
SPRZĘGŁA MIMOŚRODOWE INKOMA TYP LFK Lineflex
 - 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Lineflex typ LFK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Lineflex typ LFK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe INKOMA
- 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Lineflex typ LFK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Lineflex typ LFK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe INKOMA
Politechnika Poznańska Wydział Inżynierii Zarządzania. Wprowadzenie do techniki tarcie ćwiczenia
 Politechnika Poznańska Wydział Inżynierii Zarządzania Wprowadzenie do techniki tarcie ćwiczenia Model Charlesa Coulomb a (1785) Charles Coulomb (1736 1806) pierwszy pełny matematyczny opis, (tzw. elastyczne
Politechnika Poznańska Wydział Inżynierii Zarządzania Wprowadzenie do techniki tarcie ćwiczenia Model Charlesa Coulomb a (1785) Charles Coulomb (1736 1806) pierwszy pełny matematyczny opis, (tzw. elastyczne
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
RZECZPOSPOLITA OPIS PATENTOWY POLSKA
 RZECZPOSPOLITA OPIS PATENTOWY 151 430 POLSKA Patent dodatkowy Int. Cl.«F1
RZECZPOSPOLITA OPIS PATENTOWY 151 430 POLSKA Patent dodatkowy Int. Cl.«F1
Pomiar strat mocy w śrubowym mechanizmie podnoszenia
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY KONSTRUKCJI MASZYN II Temat ćwiczenia: Pomiar strat mocy w śrubowym
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY KONSTRUKCJI MASZYN II Temat ćwiczenia: Pomiar strat mocy w śrubowym
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Badanie przekładni cięgnowej z pasami klinowymi
 POLITECHNIKA BIAŁOTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODTAWY KONTRUKCJI MAZYN II Temat ćwiczenia: Badanie przekładni cięgnowej
POLITECHNIKA BIAŁOTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODTAWY KONTRUKCJI MAZYN II Temat ćwiczenia: Badanie przekładni cięgnowej
OBLICZANIE KÓŁK ZĘBATYCH
 OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 F16H 3/62
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 F16H 3/62") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 176935 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 309072 (22) Data zgłoszenia: 09.06.1995 (51) IntCl6: F16H 3/62 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 176935 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 309072 (22) Data zgłoszenia: 09.06.1995 (51) IntCl6: F16H 3/62 (54)
Wykład nr. 14 Inne wybrane rodzaje transmisji mocy
 Wykład nr. 14 Inne wybrane rodzaje transmisji mocy Przekładnie łańcuchowe 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch
Wykład nr. 14 Inne wybrane rodzaje transmisji mocy Przekładnie łańcuchowe 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
Precyzyjna przekładnia ślimakowa
 RZECZPO SPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164104 (13) B1 (21) Numer zgłoszenia: 288496 ( 5 1 ) IntCI5: F16H 1/16 F16H 57/02 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej
RZECZPO SPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164104 (13) B1 (21) Numer zgłoszenia: 288496 ( 5 1 ) IntCI5: F16H 1/16 F16H 57/02 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej
GEOMETRIA GWINTÓW Pracę wykonał Mateusz Szatkowski 1h.
 GEOMETRIA GWINTÓW Pracę wykonał Mateusz Szatkowski 1h. Gwint to śrubowe nacięcie na powierzchni walcowej lub stożkowej, zewnętrznej lub wewnętrznej. Komplementarne gwinty wewnętrzny i zewnętrzny mają tak
GEOMETRIA GWINTÓW Pracę wykonał Mateusz Szatkowski 1h. Gwint to śrubowe nacięcie na powierzchni walcowej lub stożkowej, zewnętrznej lub wewnętrznej. Komplementarne gwinty wewnętrzny i zewnętrzny mają tak
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7
 Przedmiot : OBRÓBKA SKRAWANIEM I NARZĘDZIA Temat: Szlifowanie cz. II. KATEDRA TECHNIK WYTWARZANIA I AUTOMATYZACJI INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7 Kierunek: Mechanika i Budowa Maszyn
Przedmiot : OBRÓBKA SKRAWANIEM I NARZĘDZIA Temat: Szlifowanie cz. II. KATEDRA TECHNIK WYTWARZANIA I AUTOMATYZACJI INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7 Kierunek: Mechanika i Budowa Maszyn
Dobór sprzęgieł hydrokinetycznych 179 Bibliografia 183
 Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
PL B1. Zespół wolnego koła dla urządzenia rozruchowego i urządzenie rozruchowe dla silnika spalinowego z zespołem wolnego koła
 PL 225168 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 225168 (13) B1 (21) Numer zgłoszenia: 415189 (51) Int.Cl. F02N 15/02 (2006.01) F02N 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 225168 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 225168 (13) B1 (21) Numer zgłoszenia: 415189 (51) Int.Cl. F02N 15/02 (2006.01) F02N 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
PIERŚCIENIE ROZPRĘŻNO ZACISKOWE PREMIUM
 -2- Spis treści 1.1 Pierścienie rozprężno-zaciskowe RfN 7013 - ogólna charakterystyka... 3 1.2 Pierścienie rozprężno-zaciskowe typ RfN 7013.0 - Tabela wymiarowa... 4 1.3 Pierścienie rozprężno-zaciskowe
-2- Spis treści 1.1 Pierścienie rozprężno-zaciskowe RfN 7013 - ogólna charakterystyka... 3 1.2 Pierścienie rozprężno-zaciskowe typ RfN 7013.0 - Tabela wymiarowa... 4 1.3 Pierścienie rozprężno-zaciskowe
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
... Zgłoszenie ogłoszono: BUP 07/00
 RZECZPOSPOLITA @OPIS PATENTOWY @PL @187109 POLSKA @B1 Urząd Patentowy Rzeczypospolitej Polskiej Numer zgłoszenia: @ Data zgłoszenia : 329139 09.10.1998 @Intcf 825821/00 Impulsowa głowica wkręcająca @ Zgłoszenie
RZECZPOSPOLITA @OPIS PATENTOWY @PL @187109 POLSKA @B1 Urząd Patentowy Rzeczypospolitej Polskiej Numer zgłoszenia: @ Data zgłoszenia : 329139 09.10.1998 @Intcf 825821/00 Impulsowa głowica wkręcająca @ Zgłoszenie
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN
 POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN KOREKCJA ZAZĘBIENIA ĆWICZENIE LABORATORYJNE NR 5 Z PODSTAW KONSTRUKCJI MASZYN OPRACOWAŁ: dr inż. Jan KŁOPOCKI Gdańsk 2000
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN KOREKCJA ZAZĘBIENIA ĆWICZENIE LABORATORYJNE NR 5 Z PODSTAW KONSTRUKCJI MASZYN OPRACOWAŁ: dr inż. Jan KŁOPOCKI Gdańsk 2000
Rozróżnia proste przypadki obciążeń elementów konstrukcyjnych
 roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
METALOWE SPRZĘGŁO PRZECIĄŻENIOWE O DUŻEJ PODATNOŚCI SKRĘTNEJ
 Szybkobieżne Pojazdy Gąsienicowe (22) nr 1, 2007 Aleksander KOWAL METALOWE SPRZĘGŁO PRZECIĄŻENIOWE O DUŻEJ PODATNOŚCI SKRĘTNEJ Sreszczenie: W artykule przedstawiono metalowe sprzęgło bardzo podatne skrętnie,
Szybkobieżne Pojazdy Gąsienicowe (22) nr 1, 2007 Aleksander KOWAL METALOWE SPRZĘGŁO PRZECIĄŻENIOWE O DUŻEJ PODATNOŚCI SKRĘTNEJ Sreszczenie: W artykule przedstawiono metalowe sprzęgło bardzo podatne skrętnie,
PL B1. INSTYTUT NAPĘDÓW I MASZYN ELEKTRYCZNYCH KOMEL, Katowice, PL BUP 02/16
 PL 224687 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224687 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 411500 (22) Data zgłoszenia: 06.03.2015 (51) Int.Cl.
PL 224687 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224687 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 411500 (22) Data zgłoszenia: 06.03.2015 (51) Int.Cl.
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 03/14. ZBIGNIEW PATER, Turka, PL JANUSZ TOMCZAK, Lublin, PL
 PL 221649 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221649 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 400061 (22) Data zgłoszenia: 20.07.2012 (51) Int.Cl.
PL 221649 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221649 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 400061 (22) Data zgłoszenia: 20.07.2012 (51) Int.Cl.
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
Z poprzedniego wykładu:
 Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
(57) turbiny promien owo-osiowej i sprężarki promieniowo-osiowej których (19) PL (11) (13)B1 (12) OPIS PATENTOWY PL B1 F02C 3/04
 turbiny promien owo-osiowej i sprężarki promieniowo-osiowej których (19) PL (11) (13)B1 (12) OPIS PATENTOWY PL B1 F02C 3/04") R Z E C Z P O SP O L IT A P O L S K A (12) OPIS PATENTOWY (19) PL (11)171309 (13)B1 Urząd Patentowy Rzeczypospolitej Polskiej (21 ) Numer zgłoszenia: 300902 (2)Data zgłoszenia: 28.10.1993 (51) IntCl6 F02C
R Z E C Z P O SP O L IT A P O L S K A (12) OPIS PATENTOWY (19) PL (11)171309 (13)B1 Urząd Patentowy Rzeczypospolitej Polskiej (21 ) Numer zgłoszenia: 300902 (2)Data zgłoszenia: 28.10.1993 (51) IntCl6 F02C
BEZLUZOWE SPRZÊG A GERWAH Z WA EM POŒREDNIM
 Bezluzowe sprzêg³a GERWAH BEZLUZOWE SPRZÊG A GERWAH Z WA EM POŒREDNIM tel.: 091-423 70 20 fax: 091-423 70 19 - 2 - Spis treści Informacje ogólne... 3 Przegląd bezluzowych precyzyjnych sprzęgieł GERWAH
Bezluzowe sprzêg³a GERWAH BEZLUZOWE SPRZÊG A GERWAH Z WA EM POŒREDNIM tel.: 091-423 70 20 fax: 091-423 70 19 - 2 - Spis treści Informacje ogólne... 3 Przegląd bezluzowych precyzyjnych sprzęgieł GERWAH
Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie
 obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie") Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie Rozciąganie lub ściskanie Zginanie Skręcanie Ścinanie 1. Pręt rozciągany lub ściskany
Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie Rozciąganie lub ściskanie Zginanie Skręcanie Ścinanie 1. Pręt rozciągany lub ściskany
LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA I NAPRAWA ELEMENTÓW UKŁADU NAPĘDOWEGO
 LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA I NAPRAWA ELEMENTÓW UKŁADU NAPĘDOWEGO 2 1. Cel ćwiczenia: Dokonać weryfikacji elementów przeniesienia napędu oraz pojazdu. W wyniku opanowania treści ćwiczenia
LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA I NAPRAWA ELEMENTÓW UKŁADU NAPĘDOWEGO 2 1. Cel ćwiczenia: Dokonać weryfikacji elementów przeniesienia napędu oraz pojazdu. W wyniku opanowania treści ćwiczenia
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
OSIE ELEKTRYCZNE SERII SHAK GANTRY
 OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
Układ kierowniczy. Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek:
 1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ
 KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
PL B1. POLITECHNIKA GDAŃSKA, Gdańsk, PL BUP 07/07. ROMAN WASIELEWSKI, Tczew, PL KAZIMIERZ ORŁOWSKI, Tczew, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209801 (13) B1 (21) Numer zgłoszenia: 377132 (51) Int.Cl. B23D 47/12 (2006.01) B27B 5/32 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209801 (13) B1 (21) Numer zgłoszenia: 377132 (51) Int.Cl. B23D 47/12 (2006.01) B27B 5/32 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Prof. Eugeniusz RATAJCZYK. Makrogemetria Pomiary odchyłek kształtu i połoŝenia
 Prof. Eugeniusz RATAJCZYK Makrogemetria Pomiary odchyłek kształtu i połoŝenia Rodzaje odchyłek - symbole Odchyłki kształtu okrągłości prostoliniowości walcowości płaskości przekroju wzdłuŝnego Odchyłki
Prof. Eugeniusz RATAJCZYK Makrogemetria Pomiary odchyłek kształtu i połoŝenia Rodzaje odchyłek - symbole Odchyłki kształtu okrągłości prostoliniowości walcowości płaskości przekroju wzdłuŝnego Odchyłki
(12) OPIS PATENTOWY (19)PL (11) (13) B1
 OPIS PATENTOWY (19)PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)160312 (13) B1 (21) Numer zgłoszenia: 280556 (51) IntCl5: Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.07.1989 F16H 57/12 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)160312 (13) B1 (21) Numer zgłoszenia: 280556 (51) IntCl5: Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.07.1989 F16H 57/12 (54)
Łożysko stożkowe CX
 Łożyska > Łożyska stożkowe > Model :.30202 CX Producent : Cx ŁOŻYSKO STOŻKOWE - wymiary metryczne JEDNORZĘDOWE 30202 Cena za 1 sztukę! DANE TECHNICZNE: wał 15mm Strona 1/{nb} Łożyska > Łożyska stożkowe
Łożyska > Łożyska stożkowe > Model :.30202 CX Producent : Cx ŁOŻYSKO STOŻKOWE - wymiary metryczne JEDNORZĘDOWE 30202 Cena za 1 sztukę! DANE TECHNICZNE: wał 15mm Strona 1/{nb} Łożyska > Łożyska stożkowe
Zespół Szkół Nr 1 im. Jana Kilińskiego w Pabianicach Przedmiot: Proces projektowania części maszyn
 Zespół Szkół Nr im. Jana Kilińskiego w Pabianicach Projektowanie sprzęgieł Obliczanie sprzęgieł polega na wyznaczeniu przenoszonego momentu obrotowego (równego momentowi skręcającemu) i obliczeniu wymiarów.
Zespół Szkół Nr im. Jana Kilińskiego w Pabianicach Projektowanie sprzęgieł Obliczanie sprzęgieł polega na wyznaczeniu przenoszonego momentu obrotowego (równego momentowi skręcającemu) i obliczeniu wymiarów.
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Badanie wpływu obciążenia na sprawność przekładni falowej
 Zakład Podstaw Konstrukcji i Eksploatacji Maszyn Instytut Podstaw Budowy Maszyn Wydział Samochodów i Maszyn Roboczych Politechnika Warszawska dr inż. Benedykt Ponder dr inż. Szymon Dowkontt Laboratorium
Zakład Podstaw Konstrukcji i Eksploatacji Maszyn Instytut Podstaw Budowy Maszyn Wydział Samochodów i Maszyn Roboczych Politechnika Warszawska dr inż. Benedykt Ponder dr inż. Szymon Dowkontt Laboratorium
Silniki prądu stałego. Wiadomości ogólne
 Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
PL B1. LISICKI JANUSZ ZAKŁAD PRODUKCYJNO HANDLOWO USŁUGOWY EXPORT IMPORT, Pukinin, PL BUP 17/16. JANUSZ LISICKI, Pukinin, PL
 PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
OSIE ELEKTRYCZNE SERII SVAK
 OSIE ELEKTRYCZNE SERII SVAK 1 OSIE ELEKTRYCZNE SERII SVAK Jednostka liniowa serii SVAK to napęd paskowy ze stałym wózkiem i ruchomym profilem. Uzupełnia ona gamę osi elektrycznych Metal Work ułatwiając
OSIE ELEKTRYCZNE SERII SVAK 1 OSIE ELEKTRYCZNE SERII SVAK Jednostka liniowa serii SVAK to napęd paskowy ze stałym wózkiem i ruchomym profilem. Uzupełnia ona gamę osi elektrycznych Metal Work ułatwiając
- 2 - Sprzęgło mimośrodowe INKOMA Inkoflex typ IFK
 - 2 - Spis treści Informacje ogólne... 3 Informacje techniczne... 4 Sprzęgło mimośrodowe INKOMA Inkoflex - wymiary IFK 44 IFK 340... 8 Tabela wymiarowa... 9 Parametry techniczne...10 Wymiary przeciwkołnierza
- 2 - Spis treści Informacje ogólne... 3 Informacje techniczne... 4 Sprzęgło mimośrodowe INKOMA Inkoflex - wymiary IFK 44 IFK 340... 8 Tabela wymiarowa... 9 Parametry techniczne...10 Wymiary przeciwkołnierza
Podstawy Konstrukcji Maszyn
 Podstawy Konstrukcji Maszyn PRZEKŁADNIE PASOWE 1 Przekładnie pasowe Przekładnie pasowe służą do przenoszenia mocy za pośrednictwem cięgien w postaci pasów. Przekładnia pasowa cierna składa się z dwóch
Podstawy Konstrukcji Maszyn PRZEKŁADNIE PASOWE 1 Przekładnie pasowe Przekładnie pasowe służą do przenoszenia mocy za pośrednictwem cięgien w postaci pasów. Przekładnia pasowa cierna składa się z dwóch
Sprzęgła. Układ napędowy - sprzęgła. Prezentacja zastrzeżona prawem autorskim kopiowanie w części lub całości tylko za zgodą autora
 Sprzęgła Prezentacja zastrzeżona prawem autorskim kopiowanie w części lub całości tylko za zgodą autora opracowanie mgr inż. Ireneusz Kulczyk Zespół Szkół Samochodowych w Bydgoszczy - 2009 Sprzęgło jest
Sprzęgła Prezentacja zastrzeżona prawem autorskim kopiowanie w części lub całości tylko za zgodą autora opracowanie mgr inż. Ireneusz Kulczyk Zespół Szkół Samochodowych w Bydgoszczy - 2009 Sprzęgło jest
RZECZPOSPOLITA OPIS PATENTOWY POLSKA
 RZECZPOSPOLITA OPIS PATENTOWY 151534 POLSKA Patent dodatkowy ^ Q. pi6h u/g do patentunr Zgłoszono: 87 10 05 (P.268086) Pierwszeństwo - URZĄD n «TrkiTtwkiu Zgłoszenieogłoszono: 88 08 04 PATENTOWY RP Opis
RZECZPOSPOLITA OPIS PATENTOWY 151534 POLSKA Patent dodatkowy ^ Q. pi6h u/g do patentunr Zgłoszono: 87 10 05 (P.268086) Pierwszeństwo - URZĄD n «TrkiTtwkiu Zgłoszenieogłoszono: 88 08 04 PATENTOWY RP Opis
Przekładnie cierne. Rozdział
 6 1 Rozdział Przekładnie cierne Przekładnią cierną nazywa się taką, w której siła jest przekazywana między elementami ruchowymi dzięki sile tarcia, bez elementu pośredniego (jak np. pasek w przekładni
6 1 Rozdział Przekładnie cierne Przekładnią cierną nazywa się taką, w której siła jest przekazywana między elementami ruchowymi dzięki sile tarcia, bez elementu pośredniego (jak np. pasek w przekładni
(12) OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy
 OPIS PATENTOWY. (54)Uniwersalny moduł obrotowo-podziałowy") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160463 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 283098 (22) Data zgłoszenia: 28.12.1989 B23Q (51)IntCl5: 16/06 (54)Uniwersalny
RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)63445 (13)B1. Przekładnia ślimakowa bezluzowa
OPIS PATENTOWY (19)PL (11)63445 (13)B1. Przekładnia ślimakowa bezluzowa") RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)63445 (13)B1 (21) Numer zgłoszenia: 288498 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H 57/12
RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)63445 (13)B1 (21) Numer zgłoszenia: 288498 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H 57/12
Jaki musi być kąt b, aby siła S potrzebna do wywołania poślizgu była minimalna G S
 Jaki musi być kąt b, aby siła potrzebna do wywołania poślizgu była minimalna G N b T PRAWA COULOMBA I MORENA: 1. iła tarcia jest niezależna od wielkości stykających się powierzchni i zależy tylko (jedynie)
Jaki musi być kąt b, aby siła potrzebna do wywołania poślizgu była minimalna G N b T PRAWA COULOMBA I MORENA: 1. iła tarcia jest niezależna od wielkości stykających się powierzchni i zależy tylko (jedynie)
Politechnika Białostocka INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Próba skręcania pręta o przekroju okrągłym Numer ćwiczenia: 4 Laboratorium z
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Próba skręcania pręta o przekroju okrągłym Numer ćwiczenia: 4 Laboratorium z
PROJEKT 2 POLITECHNIKA WARSZAWSKA PODSTAWY KONSTRUKCJI URZĄDZEŃ PRECYZYJNYCH. Temat: MODUŁ STOLIKA LINIOWEGO MSL-29
 POLITECHNIKA WARSZAWSKA PODSTAWY KONSTRUKCJI URZĄDZEŃ PRECYZYJNYCH PROJEKT 2 Temat: MODUŁ STOLIKA LINIOWEGO MSL-29 Wykonał: Ignacy MOŚCICKI Gr. 26 Prowadzący: dr inż. Wiesław Mościcki Warszawa 2004/2005
POLITECHNIKA WARSZAWSKA PODSTAWY KONSTRUKCJI URZĄDZEŃ PRECYZYJNYCH PROJEKT 2 Temat: MODUŁ STOLIKA LINIOWEGO MSL-29 Wykonał: Ignacy MOŚCICKI Gr. 26 Prowadzący: dr inż. Wiesław Mościcki Warszawa 2004/2005
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Projekt wału pośredniego reduktora
 Projekt wału pośredniego reduktora Schemat kinematyczny Silnik elektryczny Maszyna robocza P Grudziński v10d MT1 1 z 4 n 3 wyjście z 1 wejście C y n 1 C 1 O z 3 n M koło czynne O 1 z z 1 koło bierne P
Projekt wału pośredniego reduktora Schemat kinematyczny Silnik elektryczny Maszyna robocza P Grudziński v10d MT1 1 z 4 n 3 wyjście z 1 wejście C y n 1 C 1 O z 3 n M koło czynne O 1 z z 1 koło bierne P
Podstawy Konstrukcji Maszyn
 0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,