Wprowadzenie nawigacja pilotowa jest to lokalna nawigacja wodna z uwzględnieniem znaków nawigacyjnych znajdujących się na danym akwenie i terenach
|
|
|
- Krystian Janik
- 5 lat temu
- Przeglądów:
Transkrypt

1
2 Wprowadzenie W zależności od stosowanych urządzeń, nawigację można podzielić na następujące działy: nawigacja astronomiczna, astronawigacja jest to nawigacja oparta na obserwacji ciał niebieskich, przy dokładnej znajomości bieżącego czasu; nawigacja terrestryczna jest to nawigacja morska oparta na obserwacji znaków nawigacyjnych i innych charakterystycznych obiektów znajdujących się na wybrzeżu, możliwa na odległościach do około 20 mil morskich; nawigacja zliczeniowa jest to przybliżone określenie pozycji statku wodnego lub powietrznego na podstawie znajomości jego ostatniej zmierzonej pozycji oraz kierunku (kursu) i szybkości ruchu;
3 Wprowadzenie nawigacja pilotowa jest to lokalna nawigacja wodna z uwzględnieniem znaków nawigacyjnych znajdujących się na danym akwenie i terenach okalających go, stosowana w otoczeniu portów, na prowadzących do nich torach wodnych oraz w innych oznakowanych miejscach trudnych nawigacyjnie; nawigacja radiowa, radionawigacja jest to nawigacja oparta o sygnały radiowe wysyłane przez specjalne nadajniki; nawigacja satelitarna, np.: GPS jest to nawigacja na podstawie sygnałów radiowych wysyłanych przez sztuczne satelity Ziemi; nawigacja meteorologiczna, meteonawigacja jest to nawigacja prowadzona dowolnymi metodami, a polegająca na prowadzeniu statku szlakiem najkorzystniejszych warunków meteorologicznych; nawigacja bezwładnościowa inercyjna.
4 Nawigacja inercyjna - wstęp Istotę nawigacji inercyjnej stanowią metody określania pozycji za pomocą urządzeń zawierających elementy pomiarowe, wykorzystujące zasady dynamiki Newtona, czyli przyspieszeniomierzy i żyroskopów. Działanie systemów inercyjnych opiera się na drugiej zasadzie dynamiki Newtona, według której przyspieszenie ciała jest wprost proporcjonalne do oddziałującej na to ciało siły, a odwrotnie proporcjonalne do masy tego ciała.
5 Nawigacja inercyjne - wstęp W systemach nawigacji inercyjnej realizowany jest pomiar przyspieszeńoraz kątów obrotu w trzech płaszczyznach (x, y, z). Pomiar przyspieszeń dokonywany jest za pomocą urządzeń zwanych przyspieszeniomierzami (akcelerometrami), natomiast pomiaru kątów obrotu dokonują żyroskopy. Na podstawie analizy danych pochodzących z pomiaru wartości sił orazprędkości kątowych poruszającego się obiektu, system realizuje proces zliczenia, prowadzący do uzyskania pozycji geograficznej we współrzędnych geograficznych (ϕ, λ, h).
6 Nawigacja inercyjna - wstęp Droga, jaką przebył obiekt, może być wyznaczona na podstawie całkowania prędkości liniowej lub dwukrotnego całkowania przyspieszenia obiektu względem czasu. Kąt orientacji przestrzennej (kurs) wyznaczany jest poprzez jednokrotne całkowanie prędkości kątowych obiektu względem czasu. W chwili obecnej najczęściej spotykanymi w praktyce układami nawigacji zliczeniowejsą układy nawigacji inercyjnej, wchodzące w skład systemów nawigacji inercyjnej.
7 Nawigacja inercyjna - wstęp Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang. Inertial Navigation Systems) są: blok pomiarowy (IMU ang. Inertial Measurement Unit), składający się z czujników: przyspieszeniomierzy (dwa lub więcej z reguły trzy czujniki) oraz żyroskopów (trzech lub więcej, z reguły stosowane są trzy), zamontowanych na wspólnej platformie; blok obliczeniowy, składający się z komputerów nawigacyjnych, których zadaniem jest modelowanie pola grawitacyjnego Ziemi, całkowanie sygnałów wyjściowych z IMU oraz wyznaczanie i kontrolowanie pozycji obiektu.
8 Nawigacja inercyjna - wstęp Istnieje wiele modeli układów nawigacji inercyjnej, charakteryzujących się różnym stopniem skomplikowania, przyjętymi rozwiązaniami konstrukcyjnymi czy dokładnością, a co za tym idzie również i ceną. Jednak wszystkie te układy można podzielić na dwie podstawowe kategorie: układy kardanowe (ang. gimbaled), układy bezkardanowe(ang. strap-down).
9 Układy odniesienia W nawigacji inercyjnej obiekt traktowany jest jako punkt materialny poruszający się w nawigacyjnym układzie współrzędnych. Aby możliwe było wyznaczenie parametrów ruchu tego obiektu, jego położenia oraz ułożenia w przestrzeni wyrażonego we współrzędnych nawigacyjnych, niezbędne jest wyznaczenie układu odniesienia. Układem odniesienia nazywany jest punkt lub układ punktów w przestrzeni, względem którego określa się położenie lub zmianę położenia (ruch) wybranego ciała. Wybrany punkt często wskazuje się poprzez wskazanie ciała, z którym związany jest układ współrzędnych. Wybór układu odniesienia jest warunkiem opisu ruchu lub spoczynku. Układ odniesienia można wybrać dowolnie, tak, by wygodnie opisać ruch. Z układem odniesienia związuje się zazwyczaj układ współrzędnych, z którym bywa czasami mylony.
10 Układy odniesienia Układem odniesienia w nawigacji inercyjnej jest trójwymiarowa przestrzeń wyznaczana przez układ trzech płaszczyzn. Wyróżnia się pięć zasadniczych układów odniesienia (ang. Reference frames), z których cztery związane są z przestrzenią, a jeden z obiektem. Każdy z nich składa się z trzech płaszczyzn wzajemnie prostopadłych, prawoskrętnych, reprezentowanych przez trzy osie: x, y, z. Różnice pomiędzy układami odnoszą się do: przyjmowanego modelu kształtu Ziemi (kula lub elipsoida), typu układu (kartezjański lub biegunowy), miejsca, w którym znajduje się środek układu (środek Ziemi lub lokalnie).
11 Układy odniesienia Układ inercyjny opisywany jest przez trzy osie, oznaczone odpowiednio: x, y, z i oznaczany wielką literą I, od angielskiego Inertial frame. Układ ten jest podstawowym układem odniesienia z początkiem w środku Ziemi. Sam układ pozostaje nieruchomy względem przestrzeni, co oznacza, że w stosunku do gwiazd nie wykonuje ruchu obrotowego. Osie x, y leżą w płaszczyźnie równika, natomiast oś z pokrywa się z osią obrotu Ziemi.
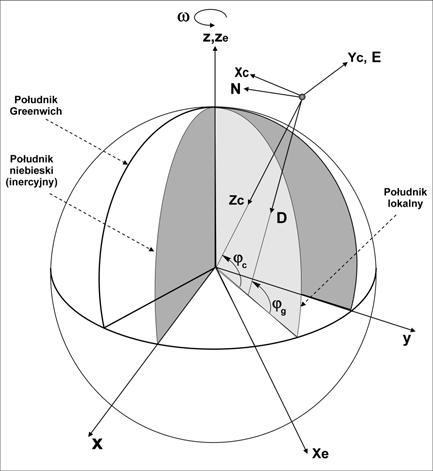
12 Układ geograficzny Układ geograficzny opisywany jest przez trzy osie, oznaczone odpowiednio: x e, y e, z e i oznaczany wielką literą E, od angielskiego Earth frame. W układzie tym Ziemia ma kształt kuli, więc odległość obiektu znajdującego się na jej powierzchni od środka Ziemi jest stała. Osie główne układu leżą na kierunkach: północnym, wschodnim oraz wzdłuż wektora prostopadłego do powierzchni Ziemi. Układ geograficzny jest układem biegunowym, którego naturalnym środkiem jest środek Ziemi. Współrzędne obiektu wyznaczane są poprzez: długość geograficzną λ g, szerokość geograficzną ϕ g, wysokość nad powierzchnią odniesienia h g.
13 Układ geocentryczny Układ geocentryczny opisywany jest przez trzy osie, oznaczone odpowiednio: x c, y c, z c i oznaczany wielką literą C. Według nomenklatury anglojęzycznej określany jest mianem geocentric frame. Układ ten aproksymuje kształt Ziemi elipsoidą obrotową. Jest to układbiegunowy z początkiem w środku ciężkości Ziemi. Oś z skierowana jest wzdłuż linii łączącej obiekt ze środkiem Ziemi, oś y skierowana jest na wschód, natomiast oś x leży w płaszczyźnie południka lokalnego. Położenie obiektu określane jest przez współrzędne geocentryczne: długość geocentryczną λ gc, szerokość geocentryczną ϕ gc, wektor odległości od środka Ziemi R gc Ze względu na przyjęty model odwzorowania powierzchni Ziemi, odległośćpunktu od środka Ziemi zależy od pozycji tego punktu na elipsoidzie.
14 Układ geodezyjny Układ geodezyjny opisywany jest przez trzy osie, oznaczone odpowiednio: N, E, D i oznaczany wielką literą N. Według nomenklatury anglojęzycznej określany jest mianem geografic frame. Podobnie jak w przypadku układu geocentrycznego, układ geodezyjny aproksymuje kształt Ziemi elipsoidą obrotową jest to również układ biegunowy. Układy geodezyjny i geocentryczny różnią się natomiast położeniem środka układu, gdyż środek układu geodezyjnego znajduje się na przecięciu płaszczyzny równikowej z linią prostopadłą do elipsoidy w punkcie pomiarowym. Parametry określające pozycję w tym układzie to: długość geodezyjna λ c, szerokość geodezyjna ϕ c, wektor odległości od środka układu R c
15 Układy odniesienia
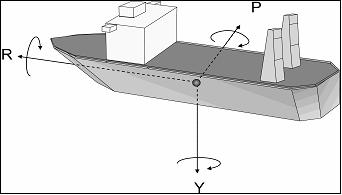
16 Układ związany z obiektem Układ związany z obiektem opisywany jest przez trzy osie, oznaczone odpowiednio: R, P, Y i oznaczany wielką literą B. Według nomenklatury anglojęzycznej układ określany jest mianem Body frame. W skład tego układu wchodzą trzy płaszczyzny reprezentowane przez trzy osie obrotu obiektu: kołysanie R (ang.: roll), kiwanie P (ang.: pitch), myszkowanie Y (ang.: yaw). Początek układu znajduje się w środku ciężkości obiektu, układ jest kartezjański, prawoskrętny. W porównaniu z wcześniej przedstawionymi układami, ten jest odrębny, gdyż nie odnosi się do Ziemi. Trzy płaszczyzny układu związane z obiektem pozwalają jedynie na wyznaczenie położenia oraz ułożenia obiektu względem jego położenia początkowego. Wyznaczenie pozycji geograficznej w tym układzie nie jest możliwe.
17 Układy odniesienia
18 Klasyfikacja układów nawigacji inercyjnej Systemy układów nawigacji inercyjnej można podzielić na dwie grupy: Układy kardanowe: układy geometryczne, układy analityczne system INS stabilizowany przestrzennie (ang. SSINS Space Stabilized INS), układy półanalityczne system INS stabilizowany lokalnie (ang. LLINS Local Level INS), Układy bezkardanowe system INS związany na stałe z układem (ang. SINS Strapdown INS).
19 Układy kardanowe Układy kardanowe składają się z dwóch podstawowych elementów: zewnętrznej ramki zbudowanej z trzech lub czterech pierścieni wzajemnie prostopadłych tworzących tzw. zawieszenie kardanowe; platformy czujników umieszczonej wewnątrz ramki, na której zamontowane są trzy przyspieszeniomierze oraz trzy żyroskopy. Charakterystyka zawieszenia kardanowego umożliwia utrzymanie platformy w stałym położeniu względem wybranego układu współrzędnych, bez względu na wychylenia obiektu we wszystkich trzech płaszczyznach. W układach kardanowych platforma zmienia położenie względem płaszczyzn obiektu, gdy ten wykonuje manewr.
20 Układy kardanowe W grupie układów kardanowych można wydzielić dwie podgrupy: układy stabilizowane przestrzennie, gdzie platforma zachowuje stałe położenie względem przestrzeni; układy stabilizowane lokalnie, gdzie platforma czujników utrzymywana jest w zadanej płaszczyźnie lokalnej na podstawie informacji o kątach obrotu obiektu względem przestrzeni otrzymywanych z żyroskopów. Układy te posiadają dodatkowo pętle sprzężenia zwrotnego z serwomechanizmem, który powoduje odchylenie platformy względem zawieszenia kardanowego oraz przestrzeni o kąt obrotu zarejestrowany przez żyroskopy, jednocześnie utrzymując platformę w płaszczyźnie lokalnej.
21 Układy kardanowe Układy kardanowe były pierwszymi układami nawigacji inercyjnej, powstały i rozwijały się w okresie, gdy przetwarzanie sygnałów z czujnika w czasie rzeczywistym, ze względu na niewielkie możliwości obliczeniowe ówczesnych maszyn cyfrowych, nie było jeszcze możliwe.
22 Układy kardanowe układy geometryczne Elementami składowymi układów geometrycznych są dwie platformy, które w czasie ruchu obiektu zmieniają położenie zarówno względem siebie, jak i względem obiektu. Na jednej z platform umieszczone są żyroskopy, na drugiej przyspieszeniomierze. Płaszczyzna żyroskopów orientowana jest względemukładu równikowego (inercyjnego, przestrzennego), natomiast płaszczyzna akcelerometrów względem lokalnego układu horyzontalnego. W układach geometrycznych, wpływ obrotu Ziemi oraz obiektu na płaszczyznę żyrokompasów i akcelerometrów jest kompensowany, dzięki czemu kąty, jakie tworzą ze sobą obie te płaszczyzny, odwzorowują szerokość oraz długość geograficzną pozycji, w której znajduje się obiekt.
23 Układy kardanowe układy analityczne i półanalityczne W układach analitycznych oraz półanalitycznychwystępuje tylko jedna platforma, na której umieszczone są żyroskopy oraz przyspieszeniomierze. Platforma ta zmienia swoją orientację przestrzenną względem obiektu. Układy różnią się ustawieniem platformy względem przestrzeni.
24 Układy kardanowe układy analityczne, układy INS stabilizowane przestrzennie Osie czujników zamontowanych w układach stabilizowanych przestrzennie pozostają przez cały czas pracy zgodne z osiami układu inercyjnego. Oznacza to, że układ (platforma z czujnikami) utrzymuje stałe położenie względem przestrzeni, niezależnie od położenia i ułożenia obiektu. Każde odchylenie obiektu od osi układu inercyjnego, wyznaczone przezczujniki, kompensowane jest poprzez odpowiednie odchylenie platformy, tak aby osie główne układu wciąż pozostawały zgodne z osiami układu przestrzennego.
25 Układy kardanowe układy analityczne układy INS stabilizowane przestrzennie W punkcie startowym A, układ horyzontalny (D, E) oraz układ przestrzenny (Zi, Xi) są ze sobą zbieżne, co oznacza, że ich osie pokrywają się. W trakcie przemieszczania się obiektu do punktu B, układ lokalny wykonuje obrót względem układu przestrzennego. Zmierzona przez żyroskopy zmiana położenia obiektu względem układu przestrzennego powoduje obrót platformy o wartość kąta zarejestrowaną przez żyroskopy. W ten sposób położenie układu względem przestrzeni pozostaje niezmienne.
26 Układy kardanowe układy półanalityczne, układy INS stabilizowane lokalnie Półanalityczneukłady nawigacji inercyjnej charakteryzują się tym, żeplatforma, na której znajdują się żyroskopy i przyspieszeniomierze utrzymywana jest w płaszczyźnie horyzontu lokalnego. Oznacza to, że względem układu przestrzennego platforma pozostaje w ciągłym ruchu. Żyroskop zachowuje stałe położenie w przestrzeni, natomiast platforma z przyspieszeniomierzami, utrzymując stałe położenie względem układu lokalnego, zostaje odchylona od położenia poziomego o kąt β. Zaburzenie takie jest równoważne przemieszczeniu układu o odległość S wzdłuż powierzchni Ziemi.
27 Układy kardanowe układy półanalityczneukłady INS stabilizowane lokalnie Całkowanieprzyspieszeń oraz obliczenia nawigacyjne realizowane są w odniesieniu do układu lokalnego. Zaletą systemów inercyjnych stabilizowanych lokalnie jest względnaprostota obliczeń, nie wymagająca transformacji współrzędnych z układu przestrzennego do układu lokalnego. Wadą natomiast są błędy systemów, występujące na dużych szerokościach geograficznych, szczególnie w rejonach podbiegunowych.
28 Układy bezkardanowe Układy bezkardanowenawigacji inercyjnej składają się z bloku czujników, czyli trzech przyspieszeniomierzy i trzech żyroskopów, zamocowanych nieruchomo względem obiektu oraz pokładowych komputerów nawigacyjnych. Układy te, w porównaniu z układami kardanowymi, charakteryzują się prostszą budową, gdyż nie zawierają żadnych elementów ruchomych, konieczne jest natomiast stosowanie większych mocy obliczeniowych, aby z odpowiednią szybkością uzyskiwać na bieżąco pełne informacje nawigacyjne. Dodatkową funkcję pełnią komputery nawigacyjne, modelujące przestrzeń trójwymiarową oraz rozwiązujące równania dotyczące ruchu platformy we wszystkich sześciu stopniach swobody, w celu transformowania położenia obiektu do układu geograficznego.
29 Układy bezkardanowe W układach kardanowych transformacja dokonywana była częściowo mechanicznie dzięki zastosowaniu zawieszenia kardanowego. W układach strap-down realizowane jest to poprzez modelowanie matematyczne, większe muszą być także zakresy pomiarowe zastosowanych czujników. Jednak wraz z rozwojem technik komputerowych oraz zwiększaniem możliwości obliczeniowych maszyn cyfrowych, układy bezkardanowe stopniowo zastępują układy kardanowe.

30 Układy bezkardanowe Osie czujników zorientowane są zgodnie z osiami położenia obiektu, na którym układ jest zainstalowany. Pomiary przyspieszeń oraz kierunku dokonywane są względem układu związanego z obiektem, natomiast parametry ruchu obiektu oraz jego położenie wyliczane są na bieżąco w komputerze pokładowym, poprzez transformację parametrów do układu geograficznego.
31 Układy bezkardanowe Osie czujników zorientowane są zgodnie z osiami położenia obiektu, na którym układ jest zainstalowany. Pomiary przyspieszeń oraz kierunku dokonywane są względem układu związanego z obiektem, natomiast parametry ruchu obiektu oraz jego położenie wyliczane są na bieżąco w komputerze pokładowym, poprzez transformację parametrów do układu geograficznego. W układzie można wyróżnić dwa podstawowe tory: tor prędkości kątowych mierzonych przez żyroskopy, tor przyspieszeń mierzonych przez przyspieszeniomierze.
32 Układy bezkardanowe Wskazywanymi w literaturze zaletami układów bezkardanowych są: prostota budowy, brak ruchomych elementów mechanicznych, mały pobór mocy, większa odporność na przeciążenia w porównaniu z układami kardanowymi, natychmiastowa gotowość do pracy. Wadą ich jest skomplikowany sposób oraz intensywność obliczeń numerycznych wykonywanych w czasie rzeczywistym, wymagające dużych mocy obliczeniowych. Jednak dzięki dynamicznemu rozwojowi technologii komputerowych oraz miniaturyzacji, wymagania sprzętowe nie są już przeszkodą w rozwoju tego rodzaju systemów.
PODSTAWY MORSKIEJ NAWIGACJI INERCYJNEJ
 AKADEMIA MORSKA W SZCZECINIE Maciej Gucma Jakub Montewka PODSTAWY MORSKIEJ NAWIGACJI INERCYJNEJ q, M Szczecin 2006 0 AKADEMIA MORSKA W SZCZECINIE Maciej Gucma Jakub Montewka PODSTAWY MORSKIEJ NAWIGACJI
AKADEMIA MORSKA W SZCZECINIE Maciej Gucma Jakub Montewka PODSTAWY MORSKIEJ NAWIGACJI INERCYJNEJ q, M Szczecin 2006 0 AKADEMIA MORSKA W SZCZECINIE Maciej Gucma Jakub Montewka PODSTAWY MORSKIEJ NAWIGACJI
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Układ współrzędnych dwu trój Wykład 2 "Układ współrzędnych, system i układ odniesienia"
 Układ współrzędnych Układ współrzędnych ustanawia uporządkowaną zależność (relację) między fizycznymi punktami w przestrzeni a liczbami rzeczywistymi, czyli współrzędnymi, Układy współrzędnych stosowane
Układ współrzędnych Układ współrzędnych ustanawia uporządkowaną zależność (relację) między fizycznymi punktami w przestrzeni a liczbami rzeczywistymi, czyli współrzędnymi, Układy współrzędnych stosowane
Układy współrzędnych
 Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Wstęp do Fizyki I (B+C) Wykład III: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny Pojęcia podstawowe
Kinematyka: opis ruchu Wstęp do Fizyki I (B+C) Wykład III: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny Pojęcia podstawowe
Wektory, układ współrzędnych
 Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Wykład 1. Wprowadzenie do przedmiotu. Powierzchnia odniesienia w pomiarach inżynierskich.
 Wykład 1 Wprowadzenie do przedmiotu. Powierzchnia odniesienia w pomiarach inżynierskich. Dr inż. Sabina Łyszkowicz Wita Studentów I Roku Inżynierii Środowiska na Pierwszym Wykładzie z Geodezji wykład 1
Wykład 1 Wprowadzenie do przedmiotu. Powierzchnia odniesienia w pomiarach inżynierskich. Dr inż. Sabina Łyszkowicz Wita Studentów I Roku Inżynierii Środowiska na Pierwszym Wykładzie z Geodezji wykład 1
nawigację zliczeniową, która polega na określaniu pozycji na podstawie pomiaru przebytej drogi i jej kierunku.
 14 Nawigacja dla żeglarzy nawigację zliczeniową, która polega na określaniu pozycji na podstawie pomiaru przebytej drogi i jej kierunku. Rozwiązania drugiego problemu nawigacji, tj. wyznaczenia bezpiecznej
14 Nawigacja dla żeglarzy nawigację zliczeniową, która polega na określaniu pozycji na podstawie pomiaru przebytej drogi i jej kierunku. Rozwiązania drugiego problemu nawigacji, tj. wyznaczenia bezpiecznej
Gdzie się znajdujemy na Ziemi i w Kosmosie
 Gdzie się znajdujemy na Ziemi i w Kosmosie Realizując ten temat wspólnie z uczniami zajęliśmy się określeniem położenia Ziemi w Kosmosie. Cele: Rozwijanie umiejętności określania kierunków geograficznych
Gdzie się znajdujemy na Ziemi i w Kosmosie Realizując ten temat wspólnie z uczniami zajęliśmy się określeniem położenia Ziemi w Kosmosie. Cele: Rozwijanie umiejętności określania kierunków geograficznych
Systemy odniesienia pozycji w odbiornikach nawigacyjnych. dr inż. Paweł Zalewski
 Systemy odniesienia pozycji w odbiornikach nawigacyjnych dr inż. Paweł Zalewski Wprowadzenie Terestryczne systemy odniesienia (terrestrial reference systems) lub systemy współrzędnych (coordinate systems)
Systemy odniesienia pozycji w odbiornikach nawigacyjnych dr inż. Paweł Zalewski Wprowadzenie Terestryczne systemy odniesienia (terrestrial reference systems) lub systemy współrzędnych (coordinate systems)
Zasady dynamiki Newtona. Pęd i popęd. Siły bezwładności
 Zasady dynamiki Newtona Pęd i popęd Siły bezwładności Copyright by pleciuga@o2.pl Inercjalne układy odniesienia Układy inercjalne to takie układy odniesienia, względem których wszystkie ciała nie oddziałujące
Zasady dynamiki Newtona Pęd i popęd Siły bezwładności Copyright by pleciuga@o2.pl Inercjalne układy odniesienia Układy inercjalne to takie układy odniesienia, względem których wszystkie ciała nie oddziałujące
PF11- Dynamika bryły sztywnej.
 Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Dynamika: układy nieinercjalne
 Dynamika: układy nieinercjalne Spis treści 1 Układ inercjalny 2 Układy nieinercjalne 2.1 Opis ruchu 2.2 Prawa ruchu 2.3 Ruch poziomy 2.4 Równia 2.5 Spadek swobodny 3 Układy obracające się 3.1 Układ inercjalny
Dynamika: układy nieinercjalne Spis treści 1 Układ inercjalny 2 Układy nieinercjalne 2.1 Opis ruchu 2.2 Prawa ruchu 2.3 Ruch poziomy 2.4 Równia 2.5 Spadek swobodny 3 Układy obracające się 3.1 Układ inercjalny
Wstęp. Ruch po okręgu w kartezjańskim układzie współrzędnych
 Wstęp Ruch po okręgu jest najprostszym przypadkiem płaskich ruchów krzywoliniowych. W ogólnym przypadku ruch po okręgu opisujemy równaniami: gdzie: dowolna funkcja czasu. Ruch odbywa się po okręgu o środku
Wstęp Ruch po okręgu jest najprostszym przypadkiem płaskich ruchów krzywoliniowych. W ogólnym przypadku ruch po okręgu opisujemy równaniami: gdzie: dowolna funkcja czasu. Ruch odbywa się po okręgu o środku
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechatronika i inteligentne systemy produkcyjne. Sensory (czujniki)
") Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Elementy dynamiki klasycznej - wprowadzenie. dr inż. Romuald Kędzierski
 Elementy dynamiki klasycznej - wprowadzenie dr inż. Romuald Kędzierski Po czym można rozpoznać, że na ciało działają siły? Możliwe skutki działania sił: Po skutkach działania sił. - zmiana kierunku ruchu
Elementy dynamiki klasycznej - wprowadzenie dr inż. Romuald Kędzierski Po czym można rozpoznać, że na ciało działają siły? Możliwe skutki działania sił: Po skutkach działania sił. - zmiana kierunku ruchu
Ćwiczenie M-2 Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego Cel ćwiczenia: II. Przyrządy: III. Literatura: IV. Wstęp. l Rys.
 Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
MECHANIKA 2 KINEMATYKA. Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
Sztuczny satelita Ziemi. Ruch w polu grawitacyjnym
 Sztuczny satelita Ziemi Ruch w polu grawitacyjnym Sztuczny satelita Ziemi Jest to obiekt, któremu na pewnej wysokości nad powierzchnią Ziemi nadano prędkość wystarczającą do uzyskania przez niego ruchu
Sztuczny satelita Ziemi Ruch w polu grawitacyjnym Sztuczny satelita Ziemi Jest to obiekt, któremu na pewnej wysokości nad powierzchnią Ziemi nadano prędkość wystarczającą do uzyskania przez niego ruchu
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Zasady dynamiki Newtona. dr inż. Romuald Kędzierski
 Zasady dynamiki Newtona dr inż. Romuald Kędzierski Czy do utrzymania ciała w ruchu jednostajnym prostoliniowym potrzebna jest siła? Arystoteles 384-322 p.n.e. Do utrzymania ciała w ruchu jednostajnym prostoliniowym
Zasady dynamiki Newtona dr inż. Romuald Kędzierski Czy do utrzymania ciała w ruchu jednostajnym prostoliniowym potrzebna jest siła? Arystoteles 384-322 p.n.e. Do utrzymania ciała w ruchu jednostajnym prostoliniowym
Wykład 2 Układ współrzędnych, system i układ odniesienia
 Wykład 2 Układ współrzędnych, system i układ odniesienia Prof. dr hab. Adam Łyszkowicz Katedra Geodezji Szczegółowej UWM w Olsztynie adaml@uwm.edu.pl Heweliusza 12, pokój 04 Spis treści Układ współrzędnych
Wykład 2 Układ współrzędnych, system i układ odniesienia Prof. dr hab. Adam Łyszkowicz Katedra Geodezji Szczegółowej UWM w Olsztynie adaml@uwm.edu.pl Heweliusza 12, pokój 04 Spis treści Układ współrzędnych
Fizyka 1- Mechanika. Wykład 4 26.X Zygmunt Szefliński Środowiskowe Laboratorium Ciężkich Jonów
 Fizyka 1- Mechanika Wykład 4 6.X.017 Zygmunt Szefliński Środowiskowe Laboratorium Ciężkich Jonów szef@fuw.edu.pl http://www.fuw.edu.pl/~szef/ III zasada dynamiki Zasada akcji i reakcji Każdemu działaniu
Fizyka 1- Mechanika Wykład 4 6.X.017 Zygmunt Szefliński Środowiskowe Laboratorium Ciężkich Jonów szef@fuw.edu.pl http://www.fuw.edu.pl/~szef/ III zasada dynamiki Zasada akcji i reakcji Każdemu działaniu
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Wektor położenia. Zajęcia uzupełniające. Mgr Kamila Rudź, Podstawy Fizyki. http://kepler.am.gdynia.pl/~karudz
 Kartezjański układ współrzędnych: Wersory osi: e x x i e y y j e z z k r - wektor o współrzędnych [ x 0, y 0, z 0 ] Wektor położenia: r t =[ x t, y t,z t ] każda współrzędna zmienia się w czasie. r t =
Kartezjański układ współrzędnych: Wersory osi: e x x i e y y j e z z k r - wektor o współrzędnych [ x 0, y 0, z 0 ] Wektor położenia: r t =[ x t, y t,z t ] każda współrzędna zmienia się w czasie. r t =
Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
 Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Obowiązkowa znajomość zagadnień Charakterystyka drgań gasnących i niegasnących, ruch harmoniczny. Wahadło fizyczne, długość zredukowana
Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Obowiązkowa znajomość zagadnień Charakterystyka drgań gasnących i niegasnących, ruch harmoniczny. Wahadło fizyczne, długość zredukowana
Oddziaływania. Wszystkie oddziaływania są wzajemne jeżeli jedno ciało działa na drugie, to drugie ciało oddziałuje na pierwsze.
 Siły w przyrodzie Oddziaływania Wszystkie oddziaływania są wzajemne jeżeli jedno ciało działa na drugie, to drugie ciało oddziałuje na pierwsze. Występujące w przyrodzie rodzaje oddziaływań dzielimy na:
Siły w przyrodzie Oddziaływania Wszystkie oddziaływania są wzajemne jeżeli jedno ciało działa na drugie, to drugie ciało oddziałuje na pierwsze. Występujące w przyrodzie rodzaje oddziaływań dzielimy na:
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia.
 Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA
 OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA Wprowadzenie W robotyce przez pojęcie manipulacji rozumiemy przemieszczanie w przestrzeni przedmiotów i narzędzi za pomocą specjalnego mechanizmu. W związku z tym pojawia
OPISY PRZESTRZENNE I PRZEKSZTAŁCENIA Wprowadzenie W robotyce przez pojęcie manipulacji rozumiemy przemieszczanie w przestrzeni przedmiotów i narzędzi za pomocą specjalnego mechanizmu. W związku z tym pojawia
DYNAMIKA SIŁA I JEJ CECHY
 DYNAMIKA SIŁA I JEJ CECHY Wielkość wektorowa to wielkość fizyczna mająca cztery cechy: wartość liczbowa punkt przyłożenia (jest początkiem wektora, zaznaczamy na rysunku np. kropką) kierunek (to linia
DYNAMIKA SIŁA I JEJ CECHY Wielkość wektorowa to wielkość fizyczna mająca cztery cechy: wartość liczbowa punkt przyłożenia (jest początkiem wektora, zaznaczamy na rysunku np. kropką) kierunek (to linia
Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów współrzędnych
 Załącznik nr 1 Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów Tabela 1. Parametry techniczne geodezyjnego układu odniesienia PL-ETRF2000 Parametry techniczne geodezyjnego
Załącznik nr 1 Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów Tabela 1. Parametry techniczne geodezyjnego układu odniesienia PL-ETRF2000 Parametry techniczne geodezyjnego
Opis ćwiczenia. Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Henry ego Katera.
 ĆWICZENIE WYZNACZANIE PRZYSPIESZENIA ZIEMSKIEGO ZA POMOCĄ WAHADŁA REWERSYJNEGO Opis ćwiczenia Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
ĆWICZENIE WYZNACZANIE PRZYSPIESZENIA ZIEMSKIEGO ZA POMOCĄ WAHADŁA REWERSYJNEGO Opis ćwiczenia Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
DYNAMIKA dr Mikolaj Szopa
 dr Mikolaj Szopa 17.10.2015 Do 1600 r. uważano, że naturalną cechą materii jest pozostawanie w stanie spoczynku. Dopiero Galileusz zauważył, że to stan ruchu nie zmienia się, dopóki nie ingerujemy I prawo
dr Mikolaj Szopa 17.10.2015 Do 1600 r. uważano, że naturalną cechą materii jest pozostawanie w stanie spoczynku. Dopiero Galileusz zauważył, że to stan ruchu nie zmienia się, dopóki nie ingerujemy I prawo
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Pojęcia podstawowe Punkt materialny Ciało, którego rozmiary można w danym zagadnieniu zaniedbać. Zazwyczaj przyjmujemy, że punkt materialny powinien być dostatecznie mały. Nie jest
Kinematyka: opis ruchu Pojęcia podstawowe Punkt materialny Ciało, którego rozmiary można w danym zagadnieniu zaniedbać. Zazwyczaj przyjmujemy, że punkt materialny powinien być dostatecznie mały. Nie jest
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
ZASADY DYNAMIKI. Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał.
 ZASADY DYNAMIKI Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał Dynamika klasyczna zbudowana jest na trzech zasadach podanych przez Newtona w 1687 roku I zasada dynamiki Istnieją
ZASADY DYNAMIKI Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał Dynamika klasyczna zbudowana jest na trzech zasadach podanych przez Newtona w 1687 roku I zasada dynamiki Istnieją
Metoda elementów skończonych
 Metoda elementów skończonych Wraz z rozwojem elektronicznych maszyn obliczeniowych jakimi są komputery zaczęły pojawiać się różne numeryczne metody do obliczeń wytrzymałości różnych konstrukcji. Jedną
Metoda elementów skończonych Wraz z rozwojem elektronicznych maszyn obliczeniowych jakimi są komputery zaczęły pojawiać się różne numeryczne metody do obliczeń wytrzymałości różnych konstrukcji. Jedną
DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Rys Model układu
 Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Miarą oddziaływania jest siła. (tzn. że siła informuje nas, czy oddziaływanie jest duże czy małe i w którą stronę się odbywa).
.") Lekcja 4 Temat: Pomiar wartości siły ciężkości. 1) Dynamika dział fizyki zajmujący się opisem ruchu ciał z uwzględnieniem przyczyny tego ruchu. Przyczyną ruchu jest siła. dynamikos (gr.) = potężny, mający
Lekcja 4 Temat: Pomiar wartości siły ciężkości. 1) Dynamika dział fizyki zajmujący się opisem ruchu ciał z uwzględnieniem przyczyny tego ruchu. Przyczyną ruchu jest siła. dynamikos (gr.) = potężny, mający
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
Ruch. Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował.
 Kinematyka Ruch Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował. Ruch rozumiany jest jako zmiana położenia jednych ciał względem innych, które nazywamy
Kinematyka Ruch Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował. Ruch rozumiany jest jako zmiana położenia jednych ciał względem innych, które nazywamy
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
14 POLE GRAWITACYJNE. Włodzimierz Wolczyński. Wzór Newtona. G- stała grawitacji 6, Natężenie pola grawitacyjnego.
 Włodzimierz Wolczyński 14 POLE GRAWITACYJNE Wzór Newtona M r m G- stała grawitacji Natężenie pola grawitacyjnego 6,67 10 jednostka [ N/kg] Przyspieszenie grawitacyjne jednostka [m/s 2 ] Praca w polu grawitacyjnym
Włodzimierz Wolczyński 14 POLE GRAWITACYJNE Wzór Newtona M r m G- stała grawitacji Natężenie pola grawitacyjnego 6,67 10 jednostka [ N/kg] Przyspieszenie grawitacyjne jednostka [m/s 2 ] Praca w polu grawitacyjnym
Doświadczalne badanie drugiej zasady dynamiki Newtona
 Doświadczalne badanie drugiej zasady dynamiki Newtona (na torze powietrznym) Wprowadzenie Badane będzie ciało (nazwane umownie wózkiem) poruszające się na torze powietrznym, który umożliwia prawie całkowite
Doświadczalne badanie drugiej zasady dynamiki Newtona (na torze powietrznym) Wprowadzenie Badane będzie ciało (nazwane umownie wózkiem) poruszające się na torze powietrznym, który umożliwia prawie całkowite
Nazwisko i imię: Zespół: Data: Ćwiczenie nr 1: Wahadło fizyczne. opis ruchu drgającego a w szczególności drgań wahadła fizycznego
 Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA
 Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Mobilne Aplikacje Multimedialne
 Mobilne Aplikacje Multimedialne Rozszerzona rzeczywistość (AR, Augmented Reality) w Systemie Android Cz.1 Krzysztof Bruniecki Podstawy Algebra liniowa, operacje na wektorach, macierzach, iloczyn skalarny
Mobilne Aplikacje Multimedialne Rozszerzona rzeczywistość (AR, Augmented Reality) w Systemie Android Cz.1 Krzysztof Bruniecki Podstawy Algebra liniowa, operacje na wektorach, macierzach, iloczyn skalarny
Notacja Denavita-Hartenberga
 Notacja DenavitaHartenberga Materiały do ćwiczeń z Podstaw Robotyki Artur Gmerek Umiejętność rozwiązywania prostego zagadnienia kinematycznego jest najbardziej bazową umiejętność zakresu Robotyki. Wyznaczyć
Notacja DenavitaHartenberga Materiały do ćwiczeń z Podstaw Robotyki Artur Gmerek Umiejętność rozwiązywania prostego zagadnienia kinematycznego jest najbardziej bazową umiejętność zakresu Robotyki. Wyznaczyć
Wyznaczanie długości i szerokości geograficznej z obserwacji astronomicznych.
 Wykład udostępniam na licencji Creative Commons: Wyznaczanie długości i szerokości geograficznej z obserwacji astronomicznych. Piotr A. Dybczyński Związek czasu słonecznego z gwiazdowym. Zadanie:
Wykład udostępniam na licencji Creative Commons: Wyznaczanie długości i szerokości geograficznej z obserwacji astronomicznych. Piotr A. Dybczyński Związek czasu słonecznego z gwiazdowym. Zadanie:
Tadeusz Lesiak. Dynamika punktu materialnego: Praca i energia; zasada zachowania energii
 Mechanika klasyczna Tadeusz Lesiak Wykład nr 4 Dynamika punktu materialnego: Praca i energia; zasada zachowania energii Energia i praca T. Lesiak Mechanika klasyczna 2 Praca Praca (W) wykonana przez stałą
Mechanika klasyczna Tadeusz Lesiak Wykład nr 4 Dynamika punktu materialnego: Praca i energia; zasada zachowania energii Energia i praca T. Lesiak Mechanika klasyczna 2 Praca Praca (W) wykonana przez stałą
PL B BUP 26/ WUP 04/07 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11) (13) B1
 OPIS PATENTOWY (19)PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)194002 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 340855 (22) Data zgłoszenia: 16.06.2000 (51) Int.Cl. G01B 7/14 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)194002 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 340855 (22) Data zgłoszenia: 16.06.2000 (51) Int.Cl. G01B 7/14 (2006.01)
Współrzędne geograficzne
 Współrzędne geograficzne Siatka kartograficzna jest to układ południków i równoleżników wykreślony na płaszczyźnie (mapie); jest to odwzorowanie siatki geograficznej na płaszczyźnie. Siatka geograficzna
Współrzędne geograficzne Siatka kartograficzna jest to układ południków i równoleżników wykreślony na płaszczyźnie (mapie); jest to odwzorowanie siatki geograficznej na płaszczyźnie. Siatka geograficzna
Orientacja zewnętrzna pojedynczego zdjęcia
 Orientacja zewnętrzna pojedynczego zdjęcia Proces opracowania fotogrametrycznego zdjęcia obejmuje: 1. Rekonstrukcję kształtu wiązki promieni rzutujących (orientacja wewnętrzna ck, x, y punktu głównego)
Orientacja zewnętrzna pojedynczego zdjęcia Proces opracowania fotogrametrycznego zdjęcia obejmuje: 1. Rekonstrukcję kształtu wiązki promieni rzutujących (orientacja wewnętrzna ck, x, y punktu głównego)
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły.
 PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły. Pracę oznaczamy literą W Pracę obliczamy ze wzoru: W = F s W praca;
PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły. Pracę oznaczamy literą W Pracę obliczamy ze wzoru: W = F s W praca;
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników
 Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL INSTYTUT TECHNOLOGII EKSPLOATACJI. PAŃSTWOWY INSTYTUT BADAWCZY, Radom, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207917 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 380341 (22) Data zgłoszenia: 31.07.2006 (51) Int.Cl. G01B 21/04 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207917 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 380341 (22) Data zgłoszenia: 31.07.2006 (51) Int.Cl. G01B 21/04 (2006.01)
Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne.
 PRACA Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne. Rozważmy sytuację, gdy w krótkim czasie działająca siła spowodowała przemieszczenie ciała o bardzo małą wielkość Δs Wtedy praca wykonana
PRACA Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne. Rozważmy sytuację, gdy w krótkim czasie działająca siła spowodowała przemieszczenie ciała o bardzo małą wielkość Δs Wtedy praca wykonana
Bryła sztywna. Wstęp do Fizyki I (B+C) Wykład XXI:
 Wykład XXI:") Bryła sztywna Wstęp do Fizyki I (B+C) Wykład XXI: Porównanie ruchu obrotowego z ruchem postępowym Ogólne wyrażenie na moment pędu Tensor momentu bezwładności Osie główne Równania Eulera Bak swobodny Porównanie
Bryła sztywna Wstęp do Fizyki I (B+C) Wykład XXI: Porównanie ruchu obrotowego z ruchem postępowym Ogólne wyrażenie na moment pędu Tensor momentu bezwładności Osie główne Równania Eulera Bak swobodny Porównanie
Podstawy Nawigacji. Kierunki. Jednostki
 Podstawy Nawigacji Kierunki Jednostki Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje,
Podstawy Nawigacji Kierunki Jednostki Program wykładów: Istota, cele, zadania i rodzaje nawigacji. Podstawowe pojęcia i definicje z zakresu nawigacji. Morskie jednostki miar. Kierunki na morzu, rodzaje,
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Ćwiczenie: "Dynamika"
 Ćwiczenie: "Dynamika" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: 1. Układy nieinercjalne
Ćwiczenie: "Dynamika" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: 1. Układy nieinercjalne
Konrad Słodowicz sk30792 AR22 Zadanie domowe satelita
 Konrad Słodowicz sk3079 AR Zadanie domowe satelita Współrzędne kartezjańskie Do opisu ruchu satelity potrzebujemy 4 zmiennych stanu współrzędnych położenia i prędkości x =r x =r x 3 = r 3, x 4 = r 4 gdzie
Konrad Słodowicz sk3079 AR Zadanie domowe satelita Współrzędne kartezjańskie Do opisu ruchu satelity potrzebujemy 4 zmiennych stanu współrzędnych położenia i prędkości x =r x =r x 3 = r 3, x 4 = r 4 gdzie
Opis ruchu obrotowego
 Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
BADANIE STANÓW RÓWNOWAGI UKŁADU MECHANICZNEGO
 Ćwiczenie 3 BADANIE STANÓW RÓWNOWAGI UKŁADU MECHANICZNEGO 3.. Cel ćwiczenia Celem ćwiczenia jest teoretyczne i doświadczalne wyznaczenie położeń równowagi i określenie stanu równowagi prostego układu mechanicznego
Ćwiczenie 3 BADANIE STANÓW RÓWNOWAGI UKŁADU MECHANICZNEGO 3.. Cel ćwiczenia Celem ćwiczenia jest teoretyczne i doświadczalne wyznaczenie położeń równowagi i określenie stanu równowagi prostego układu mechanicznego
Wyznaczanie długości i szerokości geograficznej z obserwacji astronomicznych.
 Wykład udostępniam na licencji Creative Commons: Wyznaczanie długości i szerokości geograficznej z obserwacji astronomicznych. Piotr A. Dybczyński Związek czasu słonecznego z gwiazdowym. Zadanie:
Wykład udostępniam na licencji Creative Commons: Wyznaczanie długości i szerokości geograficznej z obserwacji astronomicznych. Piotr A. Dybczyński Związek czasu słonecznego z gwiazdowym. Zadanie:
4. Odwzorowania kartograficzne
 4. Odwzorowania kartograficzne PRZYPOMNIJMY! SIATKA GEOGRAFICZNA układ południków i równoleżników wyznaczony na kuli ziemskiej lub na globusie. Nie występują tu zniekształcenia. SIATKA KARTOGRAFICZNA układ
4. Odwzorowania kartograficzne PRZYPOMNIJMY! SIATKA GEOGRAFICZNA układ południków i równoleżników wyznaczony na kuli ziemskiej lub na globusie. Nie występują tu zniekształcenia. SIATKA KARTOGRAFICZNA układ
Mechanika. Wykład 2. Paweł Staszel
 Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
O 2 O 1. Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
 msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
Kalibracja kamery. Kalibracja kamery
 Cel kalibracji Celem kalibracji jest wyznaczenie parametrów określających zaleŝności między układem podstawowym a układem związanym z kamerą, które występują łącznie z transformacją perspektywy oraz parametrów
Cel kalibracji Celem kalibracji jest wyznaczenie parametrów określających zaleŝności między układem podstawowym a układem związanym z kamerą, które występują łącznie z transformacją perspektywy oraz parametrów
I. DYNAMIKA PUNKTU MATERIALNEGO
 I. DYNAMIKA PUNKTU MATERIALNEGO A. RÓŻNICZKOWE RÓWNANIA RUCHU A1. Bryła o masie m przesuwa się po chropowatej równi z prędkością v M. Podać dynamiczne równania ruchu bryły i rozwiązać je tak, aby wyznaczyć
I. DYNAMIKA PUNKTU MATERIALNEGO A. RÓŻNICZKOWE RÓWNANIA RUCHU A1. Bryła o masie m przesuwa się po chropowatej równi z prędkością v M. Podać dynamiczne równania ruchu bryły i rozwiązać je tak, aby wyznaczyć
MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ
 Mgr inż. Kamil DZIĘGIELEWSKI Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.232 MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ Streszczenie: W niniejszym referacie zaprezentowano stanowisko
Mgr inż. Kamil DZIĘGIELEWSKI Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.232 MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ Streszczenie: W niniejszym referacie zaprezentowano stanowisko
Mechanika. Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji.
 Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
Podstawy Procesów i Konstrukcji Inżynierskich. Dynamika
 Podstawy Procesów i Konstrukcji Inżynierskich Dynamika Prowadzący: Kierunek Wyróżniony przez PKA Mechanika klasyczna Mechanika klasyczna to dział mechaniki w fizyce opisujący : - ruch ciał - kinematyka,
Podstawy Procesów i Konstrukcji Inżynierskich Dynamika Prowadzący: Kierunek Wyróżniony przez PKA Mechanika klasyczna Mechanika klasyczna to dział mechaniki w fizyce opisujący : - ruch ciał - kinematyka,
Podstawy fizyki sezon 1 VII. Pole grawitacyjne*
 Podstawy fizyki sezon 1 VII. Pole grawitacyjne* Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha * Resnick, Halliday,
Podstawy fizyki sezon 1 VII. Pole grawitacyjne* Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha * Resnick, Halliday,
Fizyka 11. Janusz Andrzejewski
 Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Geometryczne podstawy obróbki CNC. Układy współrzędnych, punkty zerowe i referencyjne. Korekcja narzędzi
 Geometryczne podstawy obróbki CNC. Układy współrzędnych, punkty zerowe i referencyjne. Korekcja narzędzi 1 Geometryczne podstawy obróbki CNC 1.1. Układy współrzędnych. Układy współrzędnych umożliwiają
Geometryczne podstawy obróbki CNC. Układy współrzędnych, punkty zerowe i referencyjne. Korekcja narzędzi 1 Geometryczne podstawy obróbki CNC 1.1. Układy współrzędnych. Układy współrzędnych umożliwiają
WYZNACZANIE MOMENTU BEZWŁADNOŚCI CIAŁ METODĄ WAHADŁA FIZYCZNEGO GRAWITACYJNEGO I SPRAWDZANIE TWIERDZENIA STEINERA ĆWICZENIE
 ĆWICZENIE 1 WYZNACZANIE MOMENTU BEZWŁADNOŚCI CIAŁ METODĄ WAHADŁA FIZYCZNEGO GRAWITACYJNEGO I SPRAWDZANIE TWIERDZENIA STEINERA Cel ćwiczenia: Doświadczalne potwierdzenie twierdzenia Steinera, wyznaczenie
ĆWICZENIE 1 WYZNACZANIE MOMENTU BEZWŁADNOŚCI CIAŁ METODĄ WAHADŁA FIZYCZNEGO GRAWITACYJNEGO I SPRAWDZANIE TWIERDZENIA STEINERA Cel ćwiczenia: Doświadczalne potwierdzenie twierdzenia Steinera, wyznaczenie
Istnieje wiele sposobów przedstawiania obrazów Ziemi lub jej fragmentów, należą do nich plany, mapy oraz globusy.
 Współrzędne geograficzne Istnieje wiele sposobów przedstawiania obrazów Ziemi lub jej fragmentów, należą do nich plany, mapy oraz globusy. Najbardziej wiernym modelem Ziemi ukazującym ją w bardzo dużym
Współrzędne geograficzne Istnieje wiele sposobów przedstawiania obrazów Ziemi lub jej fragmentów, należą do nich plany, mapy oraz globusy. Najbardziej wiernym modelem Ziemi ukazującym ją w bardzo dużym
MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu
 MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu Prowadzący: dr Krzysztof Polko Dynamiczne równania ruchu Druga zasada dynamiki zapisana w postaci: Jest dynamicznym wektorowym równaniem ruchu. Dynamiczne
MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu Prowadzący: dr Krzysztof Polko Dynamiczne równania ruchu Druga zasada dynamiki zapisana w postaci: Jest dynamicznym wektorowym równaniem ruchu. Dynamiczne
M2. WYZNACZANIE MOMENTU BEZWŁADNOŚCI WAHADŁA OBERBECKA
 M WYZNACZANE MOMENTU BEZWŁADNOŚC WAHADŁA OBERBECKA opracowała Bożena Janowska-Dmoch Do opisu ruchu obrotowego ciał stosujemy prawa dynamiki ruchu obrotowego, w których występują wielkości takie jak: prędkość
M WYZNACZANE MOMENTU BEZWŁADNOŚC WAHADŁA OBERBECKA opracowała Bożena Janowska-Dmoch Do opisu ruchu obrotowego ciał stosujemy prawa dynamiki ruchu obrotowego, w których występują wielkości takie jak: prędkość
MiBM sem. III Zakres materiału wykładu z fizyki
 MiBM sem. III Zakres materiału wykładu z fizyki 1. Dynamika układów punktów materialnych 2. Elementy mechaniki relatywistycznej 3. Podstawowe prawa elektrodynamiki i magnetyzmu 4. Zasady optyki geometrycznej
MiBM sem. III Zakres materiału wykładu z fizyki 1. Dynamika układów punktów materialnych 2. Elementy mechaniki relatywistycznej 3. Podstawowe prawa elektrodynamiki i magnetyzmu 4. Zasady optyki geometrycznej
Podręcznik Żeglarstwa. Szkoła Żeglarstwa SZEKLA
 Podręcznik Żeglarstwa Szkoła Żeglarstwa SZEKLA Autor rozdziału: Wojciech Damsz Podstawy nawigacji dla Żeglarzy Jachtowych Nawigacja morska jest dziedziną wiedzy żeglarskiej, która umożliwia bezpieczne
Podręcznik Żeglarstwa Szkoła Żeglarstwa SZEKLA Autor rozdziału: Wojciech Damsz Podstawy nawigacji dla Żeglarzy Jachtowych Nawigacja morska jest dziedziną wiedzy żeglarskiej, która umożliwia bezpieczne
Podstawy fizyki sezon 1 IV. Pęd, zasada zachowania pędu
 Podstawy fizyki sezon 1 IV. Pęd, zasada zachowania pędu Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Pęd Rozważamy
Podstawy fizyki sezon 1 IV. Pęd, zasada zachowania pędu Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Pęd Rozważamy
Prawa ruchu: dynamika
 Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Dynamika ruchu po okręgu siła dośrodkowa Prawa ruchu w układzie nieinercjalnym siły bezwładności Prawa ruchu w układzie obracajacym się siła odśrodkowa siła
Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Dynamika ruchu po okręgu siła dośrodkowa Prawa ruchu w układzie nieinercjalnym siły bezwładności Prawa ruchu w układzie obracajacym się siła odśrodkowa siła
Pomiar prędkości obrotowej
 2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Rozdział 1. Prędkość i przyspieszenie... 5 Rozdział 2. Składanie ruchów Rozdział 3. Modelowanie zjawisk fizycznych...43 Numeryczne całkowanie,
 Rozdział 1. Prędkość i przyspieszenie... 5 Rozdział. Składanie ruchów... 11 Rozdział 3. Modelowanie zjawisk fizycznych...43 Rozdział 4. Numeryczne całkowanie, czyli obliczanie pracy w polu grawitacyjnym
Rozdział 1. Prędkość i przyspieszenie... 5 Rozdział. Składanie ruchów... 11 Rozdział 3. Modelowanie zjawisk fizycznych...43 Rozdział 4. Numeryczne całkowanie, czyli obliczanie pracy w polu grawitacyjnym
Zapisy podstawy programowej Uczeń: 2. 1) wyjaśnia cechy budowy i określa położenie różnych ciał niebieskich we Wszechświecie;
 wyjaśnia cechy budowy i określa położenie różnych ciał niebieskich we Wszechświecie;") Geografia listopad Liceum klasa I, poziom rozszerzony XI Ziemia we wszechświecie Zapisy podstawy programowej Uczeń: 2. 1) wyjaśnia cechy budowy i określa położenie różnych ciał niebieskich we Wszechświecie;
Geografia listopad Liceum klasa I, poziom rozszerzony XI Ziemia we wszechświecie Zapisy podstawy programowej Uczeń: 2. 1) wyjaśnia cechy budowy i określa położenie różnych ciał niebieskich we Wszechświecie;
wiczenie 15 ZGINANIE UKO Wprowadzenie Zginanie płaskie Zginanie uko nie Cel wiczenia Okre lenia podstawowe
 Ćwiczenie 15 ZGNANE UKOŚNE 15.1. Wprowadzenie Belką nazywamy element nośny konstrukcji, którego: - jeden wymiar (długość belki) jest znacznie większy od wymiarów przekroju poprzecznego - obciążenie prostopadłe
Ćwiczenie 15 ZGNANE UKOŚNE 15.1. Wprowadzenie Belką nazywamy element nośny konstrukcji, którego: - jeden wymiar (długość belki) jest znacznie większy od wymiarów przekroju poprzecznego - obciążenie prostopadłe
ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU.
 SPIS TREŚCI Przedmowa ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU. 1.1. Szerokość i długość geograficzna. Różnica długości. Różnica szerokości. 1.1.1.
SPIS TREŚCI Przedmowa ROZDZIAŁ 1. NAWIGACJA MORSKA, WSPÓŁRZĘDNE GEOGRAFICZNE, ZBOCZENIE NAWIGACYJNE. KIERUNEK NA MORZU. 1.1. Szerokość i długość geograficzna. Różnica długości. Różnica szerokości. 1.1.1.