PLC Programmable Logic Controller
|
|
|
- Wacław Czajkowski
- 9 lat temu
- Przeglądów:
Transkrypt
1 PLC Programmable Logic Controller sterowanie logiczne sterowanie sekwencyjne Producenci m.in.: Simens General ElectricFanuc Rockwell Automation (AllenBradley) Simatic: S5,S7 GE Fanuc 90: Micro, 30, 70; VersaMax MicroLigix 1000, SLC500, PLC5 Omron OMRON: CPM1, CQM1, C500, C2000 Schneider Electric TSX: Nano, Micro, Premium; Quantum Mitsubishi SAIABurgess Electronics SAIA: PCD 1, PCD 2, PCD 4, PCD 6 Advantech ADAM 5000

2 Struktura sprzętowa

3 Budowa CPU zaciski wejściowe zaciski wyjściowe zasilacz CPU DI DO AI AO spec. sterownik kompaktowy (compact) sterownik modułowy (modular) CPU 4DI 2DI 1DO AI 4DO sterownik rozproszony (distributed) programowanie
 CPU 4DI 2DI 1DO AI 4DO sterownik")
4 Moduły DI 5/12/24 VDC / VAC logika + / separacja galwaniczna filtry wejściowe P 24V DI 01 M 24V P 24V DI 01 M 24V Obiekt Obiekt Obiekt Magistrala sterownika P F 7 P F 0 24VDC

5 Moduły DO tranzystorowe VDC z/bez separacji przekaźnikowe separacja galwaniczna VAC / VDC z/bez wspólnego zacisku z/bez zabezpieczenia styków P 24V DO 01 M 24V element listwowy Obiekt L (220V) stycznik N Obiekt Magistrala sterownika +
")

6 Moduły AI napięciowe / prądowe dokładność (ilość bitów) multiplekser przetwornika szybkość Moduły AO obciąŝalność zabezpieczenie wy Moduły specjalne szybkie liczniki PID procesor komunikacyjny

 90 11.3 PCD2.E500 6 DI (110..240 VAC, z separacją) 125 20.8 PCD2.A200 4 DO (250 VAC, 2 A, przekaźnikowe) 115 28.8 PCD2.A250 8 DO (250 VAC, 2 A, przekaźnikowe) 155 19.")
7 TYP Moduły wejść/wyjść dyskretnych /IO PCD2.E110 8 DI (24 VDC, pos/neg, 8 ms, bez separacji) PCD2.E DI (24 VDC, pos/neg, 8 ms, bez separacji) PCD2.E610 8 DI (24 VDC, pos/neg, 8 ms, z separacją) PCD2.E500 6 DI ( VAC, z separacją) PCD2.A200 4 DO (250 VAC, 2 A, przekaźnikowe) PCD2.A250 8 DO (250 VAC, 2 A, przekaźnikowe) PCD2.A400 8 DO (24 VDC, 0.5 A, tranzystorowe) PCD2.B100 2 DI (24 VDC), 2 DO (24 VDC, 0.5 A), 4 DI/DO dowolne Moduły wejść/wyjść analogowych PCD2.W100 4 AI, napięciowe (0 10VDC / ±10VDC) 12 bit PCD2.W105 4 AI, prądowe (0 20 ma / 4 20 ma) 12 bit PCD2.W110 4 AI, Pt100, 12 bit PCD2.W200 8 AI, napięciowe (0 10VDC) 10 bit PCD2.W210 8 AI, prądowe (0 20 ma / 4 20 ma) 10 bit PCD2.W400 4 AO, napięciowe (0 10 VDC) 8 bit PCD2.W410 4 AO, uniwersalne (0 10 VDC / 4 20 ma) 8 bit PCD2.W500 2 AI (0 10VDC / ±10VDC), 2 AO (0 10VDC / ±10 VDC) PCD1/PCD2 SAIA
 12 bit 445 111 PCD2.W105 4 AI, prądowe (0 20 ma / 4 20 ma) 12 bit 445 111 PCD2.W110 4 AI, Pt100, 12 bit 530 132 PCD2.")
8 TYP Moduły wejść/wyjść dyskretnych /IO IC300DIM210 8 DI (12/24 VDC, pos/neg) IC300DQM201 8 DO (5/12/24 VDC, 0.5 A, neg) IC300DQM202 8 DO (250 VAC, 4 A) IC300DIQ611 8 DI (12/24 VDC, pos/neg), 8 DO (5/12/24 VDC, 0.5 A, neg) IC300DIQ616 8 DI (12/24 VDC, pos/neg), 8 DO (5/12/24 VDC, 0.5 A, pos) IC300DIQ624 8 DI (120 VAC), 8 DO (80250 VAC, 0.3 A) IC300DIQ612 8 DI (12/24 VDC, pos/neg), 6 DO (250 VAC, 4 A) Moduły wejść/wyjść analogowych IC300ADC110 4 AI, napięciowe (0 5VDC / ±5VDC / 0 10VDC / ±10VDC IC300ADC120 4 AI, prądowe (0 20 ma / 4 20 ma) IC300RTD100 4 AI, RTD (Pt100, Pt200, Pt500, Pt1000) IC300ADC010 2 AI, napięciowe (0 5 VDC / ±5VDC / 0 10VDC / ±10VDC IC300ADC020 2 AI, prądowe (0 20 ma, 4 20 ma) IC300RTD000 2 AI, RTD (Pt100, Pt200, Pt500, Pt1000) IC300DAC101 4 AO, napięciowe (±10 VDC) IC300DAC102 4 AO, prądowe (4 20 ma) IC300DAC001 2 AO, napięciowe (±10 VDC) IC300DAC002 2 AO, prądowe (4 20 ma) IC300MIX111 2 AI, napięciowe (±10VDC), 2 AO, napięciowe (±10 VDC) IC300MIX122 2 AI, prądowe (4 20 ma), 2 AO, prądowe (4 20 ma) OCS GeFanuc
 493 31 IC300DIQ612 8 DI (12/24 VDC, pos/neg), 6 DO (250 VAC, 4 A) 515 37 Moduły wejść/wyjść analogowych IC300ADC110 4 AI, napięciowe (0 5VDC / ±5VDC / 0 10VDC / ±10VDC 508 127 IC300ADC120 4 AI,")
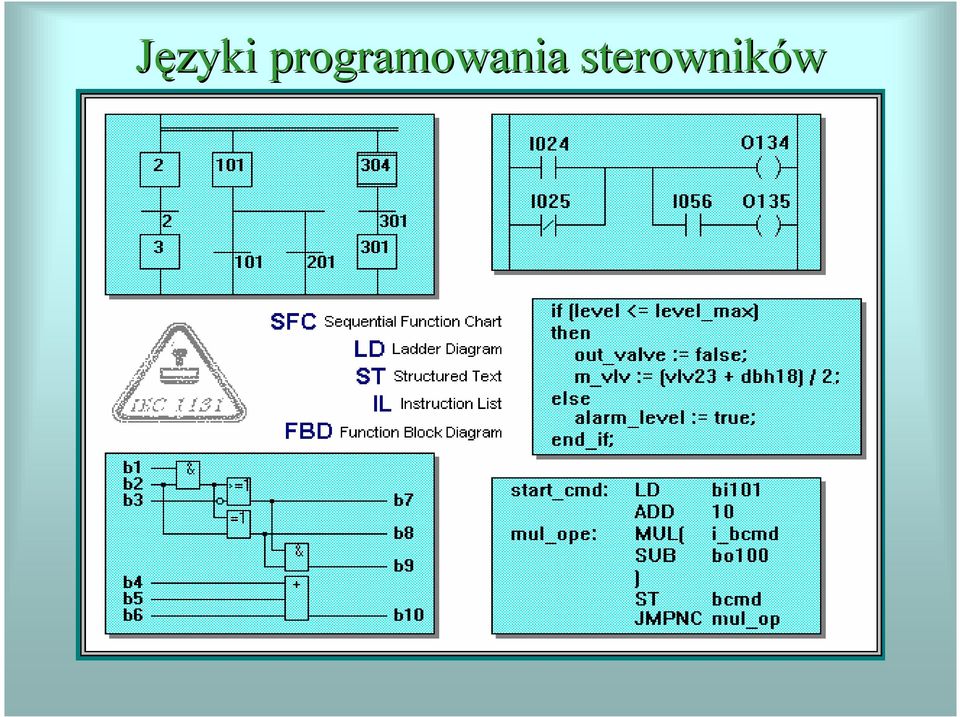
9 Norma IEC 1131 "Programmable" Controllers" 1. Definicje pojęć 2. Wymogi elektryczne, mechaniczne i funkcyjne 3. Ujednolicenie języków 4. Przewodnik dla projektantów 5. Opis komunikacji Zmienne: I (wejście), Q (wyjście), M (pamięć) X (bit), B (bajt), W (słowo), D (2x słowo), L (4x słowo) np.: %I1.1 %IW1.2 pomiń szczegóły
, Q (wyjście), M (pamięć) X (bit), B")
10 Operacje podstawowe P N Styki zwierne (normalnie otwarte) Styki rozwierne (normalnie zamknięte) Styki reagujące na narastające zbocze Styki reagujące na opadające zbocze S R Cewka standardowa Cewka negująca Cewka ustawiająca Cewka resetująca M SM RM Cewka z zapamiętaniem stanu Cewka ustawiająca z zapamiętaniem stanu Cewka resetująca z zapamiętaniem stanu P N Cewka reagująca na narastające zbocze Cewka reagująca na opadające zbocze

11 Układy czasowe opóźnienie czasowe, generowanie zadanego przebiegu, odmierzanie czasu Układy licznikowe licznik zdarzeń,, dzielnik częstotliwo stotliwości Enable Reset Q Preset Enable Preset Q En Re Q PV V En Q PV V pomiń szczegóły

12 I0.0 I0.1 PLC a układy przekaźnik ników Q1.0 I0.2 Q1.1 I0.3 I0.0 I0.1 Q1.0 Q1.0 Q1.0 Q1.1 I0.2 I0.3 Q1.1 Q1.1 OMRON: LD 0.0 OR 1.0 AND 0.1 OUT 1.0 LD 0.2 LD 1.1 AND 0.3 OR LD OUT 1.1 SIEMENS: :A( :O I0.0 :O Q1.0 :) :A( I0.1 := Q1.0 :A I0.2 :O :A Q1.1 :A I0.3 := Q1.1 I0.0 Q1.0 Q1.1 I0.3 >1 I0.1 I0.2 & & >1 Q1.0 Q1.1


13 Pętla programowa cykl pracy inicjacja testy systemowe program uŝytkownika diagnostyka obsługa IO komunikacja czas rzędu: 0.6 ms 1.4 ms pomijalny 0.01ms/AI 5% Przykład: czas reakcji na zdarzenie 8 ms opóźnienia sygnału we 1 ms ustawienia systemowe 14 ms program uŝytkownika 10 ms opóźnienie sygnału wy Σ 33 ms lub 48 ms (+1 cykl)


14 Języki programowania sterowników
 podgrzewać (z. para) opróŝnić (LO, z.")
15 Przykład napełnić (HI, pompa1, pompa2) mieszać 30 s (mieszadło) podgrzewać (z. para) opróŝnić (LO, z.odpływ, pompa 3)
 opróŝnić (LO, z.")
16
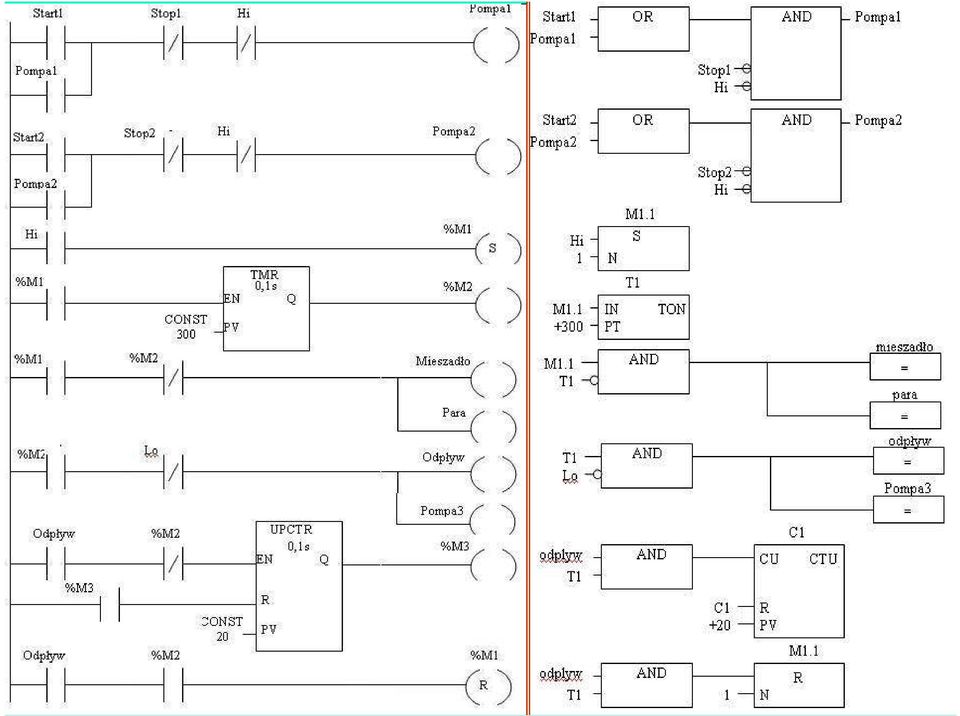
17 NETWORK 1 LD "start1" O "pompa1" AN "stop1" AN "hi" = "pompa1" NETWORK 2 LD "start2" O "pompa2" AN "stop2" AN "hi" = "pompa2" NETWORK 3 LD "hi" S M1.1, 1 NETWORK 4 LD M1.1 TON T1, +300 NETWORK 5 LD M1.1 AN T1 = "mieszadlo" = "para" NETWORK 6 LD T1 AN "lo" = "odplyw" = "pompa3" NETWORK 7 LD "odplyw" A T1 LD C1 CTU C1, +20 NETWORK 8 LD "odplyw" A T1 R M1.1, 1 VAR T1 : TON; C1 : CTU; Czas : TIME := t%300ms Ustaw1 : SR; Ustaw2 : RS; Start1 : BOOL At %I1 Stop1 : BOOL At %I3 Start2 : BOOL At %I2 Stop2 : BOOL At %I4 Pompa1 : BOOL At %Q1 Pompa2 : BOOL At %Q2 Mieszadlo : BOOL At %Q3 Hi : BOOL At %I5 LO : BOOL At %I6 Para : BOOL At %Q4 Odplyw : BOOL At %Q5 Pompa3 : BOOL At %Q6 END_VAR REPEAT Pompa1:=(Start1 OR Pompa1) ANDN Stop1 ANDN Hi; Pompa2:=(Start2 OR Pompa2) ANDN Stop2 ANDN Hi; Ustaw1(S1:=Hi,R:=False); %M1:=Ustaw.Q; T1(IN:=%M1,PT:=czas); %M2:=T1.Q; Para:=%M1 ANDN %M2; Mieszadło:= Para; Odpływ:= %M2 ANDN Lo; Pompa3:= Odpływ; %M4:=Odpływ ANDN %M2; C1(CU:=%M4,R:=%M3,PV:=20); %M3:=C1.Q; %M4:=Odpływ AND %M2; Ustaw2(S:=False,R1:=%M4); UNTIL (NOT C1.Q);
 ANDN Stop1 ANDN Hi;")
18 %M1 Start2 Stop2 Pompa2 Pompa2 Start1 Stop1 Pompa1 Pompa1 Hi S %M1 TMR CONST 300 %M1 %M2 EN Q PV 0,1s %M1 Mieszadło Para %M1 Pompa2 Pompa1 R R R %M0 %M2 %M3 %M3 Pompa3 Mieszadło %M2 Para R R %M1 %M3 S Lo Odpływ R %M3 Pompa3 R R %M0 S Odpływ %M3 R %M0

19 Ograniczenia PLC % I0.0 % I0.1 % Q 0.1 % I0.0 % I0.1 % Q 0.1 % I0.2 % I0.3 % I0.2 % I0.3 % Q 0.2 % I0.2 % Q 0.2 % I0.0 % I0.1 % Q 0.1 % I0.0 % I0.1 % Q 0.1 % I0.2 % I0.3 % I0.2 % I0.3 % I0.4 % I0.4 % I0.3 % I0.0 % I0.1 % I0.3 % Q 0.1 % I0.0 % I0.1 % I0.3 % Q 0.1 % I0.2 % I0.3 % I0.2 % I0.3 % I0.4 % I0.2 % I0.4

20 Schemat funkcjonalny układu automatycznej regulacji zadajnik SP e CV regulator stacyjka sterowanie u ręczne PV x elementy pomiarowe przetwornik pomiarowy czujnik pomiarowy zespół wykonawczy element wykonawczy element nastawczy obiekt t 1 de( t) u( t) = K p e( t) + e( τ ) dτ + Td + U Ti dt 0 0
 u( t) = K p e( t) + e( τ )")
21 Struktura układu sterowania sterowanie układ zamknięty (regulacja) układ otwarty y we y wy + G R G 0 we U R G 0 Y * Y Feedback Control Feedforward Control
22 Regulacja korekcja y * + G R G 0 y y * + G 0 y G k y * y 1/G k G k + G 0
23 Algorytm PID t 1 de( t) u( t) = K p e( t) + e( τ ) dτ + Td + U Ti dt 0 0 SP PV + człon róŝniczkujący człon całkujący T d 1/T i Bias K p ograniczenie szybkości PID ISA znak CV SP PV + człon róŝniczkujący człon całkujący T d K p 1/T i Bias ograniczenie szybkości PID IND znak CV
24 PID / PL7 Micro Modicon Blok PID SP Ogranicz. 0 + ε T I T D K P max Ogranicz. min CV (AO) Algorytm PID CV manual PV PWM SERVO SP PV PID CV A / F SP PV PID CV + open close Tmod PulseWidth Modulation połoŝenie (position) Hist pozycjoner (positioner)
 adres = 40")
25 PID / GeFanuc Logicmaster zezwolenie (enable) wartość zadana SP (Set Point) zmienna procesowa PV (Process Variable) MAN tryb praca automatyczna / ręczna UP inkrementacja wyjścia w trybie MAN Dn dekrementacja wyjścia w trybie MAN ok potwierdzenie poprawności działąnia zmienna sterująca CV (Control Variable) adres = 40 rejestrów
26 FB 41 = CONT_C PV normaliz SP Bloki PID w S7300,S7 300,S (Function blocks PID Control) CONT_C (continuous control) KP TD TI FB 42 = CONT_S (step control) CV manual normaliz CV FB 43 = PULSEGEN (pulse generation) FB 58 = TCONT_CP FB 59 = TCONT_S TCONT_CP (out: continue / pulse) TCONT_S (out: open, close)
27 S7300 FM355C: 4 AI, 8 DI, 4 AO FM355S: 4 AI, 8 DI, 8 DO 4 kanały S7400 FM455C: 16 AI, 16 DI, 16 AO FM455S: 16 AI, 16 DI, 32 DO 16 kanałów Moduły y regulatorów (Controller modules)
28 Konfiguracja regulatorów Struktura algorytmu PID RóŜniczkowanie wartości wyjścia obiektu Strefa nieczułości ci Ograniczenie wartości na wyjściu Zabezpieczenie przed nasyceniem członu całkuj kującego Ograniczenie szybkości wzrostu wartości wyjścia regulatora Stacyjka sterowania Typ sygnału u wyjściowego (analogowy, impulsowy, binarny) Struktury układ adów w regulacji C = To/T: C<0.05 łatwa (To<T/20) 0.05<C<0.25 dość trudna C>0.25 trudna
29 Regulatory cyfrowe (digital controllers) DDC Direct Digital Control Honeywell BC TDC x PID, 10modułowa kaseta regulatory kasetowe Foxboro, Siemens, Fisher Controls, Moore, Bailey Siemens TELEPERM M regulatory aparatowe (tablicowe) P200 Micon 1978 samonastrajanie i adaptacja (autotuning & adaptation) LeedsNorthrup 1981 (ciągła/okresowa korekcja nastaw) Siemens TELEPERM M Siemens SIPART 1989
30 Na świecie: Bailey Foxboro. Micen Moore KentTaylor Toshiba Turnbull Simens Smar YamatakeHonywell Yokogawa Regulatory wielofunkcyjne W Polsce: SIEMENS SIPART DR 20, DR 22, DR 24 Zakład Produkcji Doświadczalnej Automatyki PSW RF537, PSW8102, PSW8411, PSW16602, PSW16611 CONTROLMATICA ZAPPNEFAL EFTRONIC X (U486), V (U487), XP (U488), LABORASTER As 520, 610 SO (U497), XF (U496) LABEL Elektronika Laboratoryjna LB 600
31 Panel regulatora wielofunkcyjnego DR24 Sipart Siemens MC5000 Fisher Porter S32 Micon EC300 Toshiba
32 Schemat funkcjonalny regulatora wielofunkcyjnego
33 Przykład konfiguracji regulatora wielofunkcyjnego
34 Samonastrajanie (autotuning) 1metoda Zieglera Nicholsa (odpowiedzi skokowej) identyfikacja modelu (przy otwartej pętli) nastawy wg tabel dla róŝnych klas obiektów 2 metoda Zieglera Nicholsa (metoda cyklu granicznego) nastaw działanie proporcjonalne zwiększaj wzmocnienie i odczytaj okres oscylacji nastawy wg wzorów dla róŝnych regulatorów (modyfikacje Pessena, Opelta, Hanssena)
35 SIPART autotuning I. Sprawdzenie stałości PV przez okres 0,1 tu II. Wmuszenie skokowe CV i zapis odpowiedzi skokowej III. Zbadanie warunków wiarygodności eksperymentu IV. Obliczenie parametrów modelu obiektu (model Strejca): G(s)=k/(Ts+1) n dla 1<=n<=8 V. Wyliczenie nastaw i sugestia algorytmu (PI lub PID) VI. Wybór algorytmu i akceptacja nastaw przez operatora
36 Adaptacja Układ z programowanymi zmianami parametrów w regulatora z pośredni rednią Układy z identyfikacją modelu z bezpośredni rednią

37 Algorytm adaptacyjny EXACT (zastosowany w regulatorze 761 Micro FOXBORO) 1. Oczekiwanie na istotne zakłócenie tzn. o amplitudzie większej niŝ trzykrotny poziom szumów start algorytmu EXACT; 2. Rejestracja odpowiedzi procesu na zakłócenie; 3. Obliczenie wartości nastaw regulatora PID; 4. Wprowadzenie obliczonych nastaw do regulatora stop algorytmu EXACT; 5. Regulacja obiektu z nowymi nastawami, powrót do pkt. 1.
/(e1+e2) Porównuje o, d z zadanymi wartościami o*, d* W razie konieczności koryguje nastawy")
38 Opis algorytmu EXACT odchyłka regulacji trzykrotnie większa od szumów algorytm budzi się Rejestruje trzy kolejne amplitudy E1, E2, E3 oraz okres T. Wyznacza przeregulowanie o=e1/e2 oraz tłumienie d=(e2+e3)/(e1+e2) Porównuje o, d z zadanymi wartościami o*, d* W razie konieczności koryguje nastawy Zakłócenie
39 Regulator ciągły + elementy nieliniowe Ograniczenie elementu wykonawczego u x * + e u k 1 i /s K p u 1 u G o x Strefa martwa e e 1 PID u 1 ograniczenie szybkości znak u
40 Regulator ciągły + elementy nieliniowe Ograniczenie elementu wykonawczego u x * + e u k 1 i /s K p u 1 u G o x Strefa martwa e e 1 PID u 1 ograniczenie szybkości znak u
41 Regulator ciągły + elementy nieliniowe Ograniczenie całkowania integrator antiwindup circut u e + u u k 1 i /s i u min K p u k a u max u 1 u max u 1 u układ z dodatkową nieliniowością
42 Regulator ciągły + elementy nieliniowe Ograniczenie całkowania integrator antiwindup circut + K p u e u u k 1 i /s i u min + k a u max u 1 u układ z wykorzystaniem istniejącego nasycenia w czasie nasycenia e + u u k 1 i /s i K p + k a + u max
43 Regulator ciągły + elementy nieliniowe SP PV Regulator ciągły z wyjściem dyskretnym wyjście dwustanowe PWM PID CV A / F wypełnienie SERVO SP CV PID + PV włącz wyłącz Tmod połoŝenie Hist pozycjoner wypełnienie włącz/wyłącz
44 Regulator ciągły + elementy nieliniowe Regulator ciągły z wyjściem dyskretnym wyjście trójstanowe x * e PID u + u 1 Obiekt x u 1 Obiekt x u + PID e x * pozycjoner trójstanowy (zamykaniestopotwieranie)
45 Regulatory przekaźnikowe Obiekt x u u e e x * 1/T m s u u 1 Obiekt u 1 e x e x *
46 Regulatory przekaźnikowe + korekcja Obiekt x u u w w e x * K(s) u Obiekt x 1/T m s u 1 u 1 w w e x * K(s)
47
48 Wybór typu regulatora zalecenia h k = T / T r o T o T k r t Regulacja Typ regulatora k r < 1 20 T > 20T o łatwa regulator dwupołoŝeniowy jeśli tylko obiekt mocno uśrednia 1 20 < k r < 1 4 dość trudna regulator PI lub PID k r > 1 4 T < 4T o trudna

49 Stacje rozproszonego systemu automatyki stacje procesowe pomiary, sterowanie, zabezpieczenia stacje operatorskie wizualizacja stacja inŝynierska konfiguracja/programowanie stacje robocze baza danych, archiwacja, raporty

50 Stacje procesowe w systemie Komunikacja: bezpośrednio wspólne obszary pamięci sieci oddalone I/O Bezpieczeństwo: Redundancja kanałów, modułów, łączy komunikacyjnych, sterowników Analiza ryzyka
51 Graf zaszeregowania zagroŝeń i analizy ryzyka start stopień moŝliwych obraŝeń: S1 lekkie, nietrwałe S2 cięŝkie częstość / czas trwania ekspozycji: F1 rzadko / krótki czas F2 często / długi czas moŝliwość uniknięcia zagroŝenia: P1 moŝliwe pod pewnymi warunkami P2 prawie niemoŝliwe S1 S2 F1 F2 P1 P2 P1 P2 B Kategoria zagroŝenia kategoria zalecana kategoria dopuszczalna (z dodatkowymi zabezpieczeniami) przewymiarowane zabezpieczenia
Praktyka inżynierska korzystamy z tego co mamy. regulator. zespół wykonawczy. obiekt (model) Konfiguracja regulatora
 Konfiguracja regulatora") raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
Spis treści. Dzień 1. I Elementy układu automatycznej regulacji (wersja 1109) II Rodzaje regulatorów i struktur regulacji (wersja 1109)
 II Rodzaje regulatorów i struktur regulacji (wersja 1109)") Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Dynamika procesu zmienna stała. programowalne zmiany parametrów r.
 Sterowanie adaptacyjne Sterowanie adaptacyjne polega na dostosowywaniu (adaptacji) nastaw regulatora do zmian parametrów obiektu (w trakcie pracy) Techniki adaptacji Dynamika procesu zmienna stała regulator
Sterowanie adaptacyjne Sterowanie adaptacyjne polega na dostosowywaniu (adaptacji) nastaw regulatora do zmian parametrów obiektu (w trakcie pracy) Techniki adaptacji Dynamika procesu zmienna stała regulator
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
JĘZYKI PROGRAMOWANIA STEROWNIKÓW
 JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
STEROWNIKI i REGULATORY (TS1A522 380)
") STEROWNIKI i REGULATORY (TS1A522 380) Kierunek: Elektronika i Telekomunikacja (EP), sem. V Szczegółowy program wykładu 15 godz. 1. Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu
STEROWNIKI i REGULATORY (TS1A522 380) Kierunek: Elektronika i Telekomunikacja (EP), sem. V Szczegółowy program wykładu 15 godz. 1. Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 8. Układy ciągłe. Regulator PID
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
Zastosowania mikrokontrolerów w przemyśle. Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Budowa sterownika PLC Moduł jednostka centralna Zasilacz Moduły wejść/wyjść Moduły komunikacyjne
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Budowa sterownika PLC Moduł jednostka centralna Zasilacz Moduły wejść/wyjść Moduły komunikacyjne
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Ćwiczenie 3 - Sterownik PLC realizacja algorytmu PID
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie KATEDRA AUTOMATYKI LABORATORIUM Aparatura Automatyzacji Ćwiczenie 3. Sterownik PLC realizacja algorytmu PID Wydział EAIiE kierunek AiR rok
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie KATEDRA AUTOMATYKI LABORATORIUM Aparatura Automatyzacji Ćwiczenie 3. Sterownik PLC realizacja algorytmu PID Wydział EAIiE kierunek AiR rok
STEROWNIKI PROGRAMOWALNE PLC
 STEROWNIKI PROGRAMOWALNE PLC SPIS TREŚCI PROGRAMOWALNE UKŁADY AUTOMATYKI ZADANIA STEROWNIKÓW PLC CECHY STEROWNIKÓW PLC RODZAJE STEROWNIKÓW PLC OBSZARY ZASTOSOWAŃ STEROWNIKÓW PLC BUDOWA STEROWNIKÓW PLC
STEROWNIKI PROGRAMOWALNE PLC SPIS TREŚCI PROGRAMOWALNE UKŁADY AUTOMATYKI ZADANIA STEROWNIKÓW PLC CECHY STEROWNIKÓW PLC RODZAJE STEROWNIKÓW PLC OBSZARY ZASTOSOWAŃ STEROWNIKÓW PLC BUDOWA STEROWNIKÓW PLC
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Budowa sterownika PLC Moduł jednostka centralna Zasilacz Moduły wejść/wyjść Moduły komunikacyjne
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Budowa sterownika PLC Moduł jednostka centralna Zasilacz Moduły wejść/wyjść Moduły komunikacyjne
Warunki. Co to? Po co? Supervisor Control And Data Acquisition. Jak? Systemy automatyki Systemy akwizycji danych
 Co to? Po co? wizualizacja kontrola archiwacja Systemy automatyki Systemy akwizycji danych przetwarzanie danych sterowanie Jak? zmierzyć, przetworzyć przekazać Warunki rodzaj wielkości dynamika aktualizacja
Co to? Po co? wizualizacja kontrola archiwacja Systemy automatyki Systemy akwizycji danych przetwarzanie danych sterowanie Jak? zmierzyć, przetworzyć przekazać Warunki rodzaj wielkości dynamika aktualizacja
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
E-TRONIX Sterownik Uniwersalny SU 1.2
 Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Klasyczna architektura sterownika PLC
 Programowalne sterowniki logiczne PLC - są to komputery przemysłowe, które umożliwiają sterowanie pracą maszyn i urządzeń w układzie otwartym i/lub zamkniętym. Praca PLC polega na monitorowaniu stanu wejść,
Programowalne sterowniki logiczne PLC - są to komputery przemysłowe, które umożliwiają sterowanie pracą maszyn i urządzeń w układzie otwartym i/lub zamkniętym. Praca PLC polega na monitorowaniu stanu wejść,
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Regulacja prędkości posuwu belki na prowadnicach pionowych przy wykorzystaniu sterownika Versa Max
 Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
IC200UDR002 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO
 IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
Klasyczna architektura sterownika PLC
 Programowalne sterowniki logiczne PLC - są to komputery przemysłowe, które umożliwiają sterowanie pracą maszyn i urządzeń w układzie otwartym i/lub zamkniętym. Praca PLC polega na monitorowaniu stanu wejść,
Programowalne sterowniki logiczne PLC - są to komputery przemysłowe, które umożliwiają sterowanie pracą maszyn i urządzeń w układzie otwartym i/lub zamkniętym. Praca PLC polega na monitorowaniu stanu wejść,
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
M-1TI. PRECYZYJNY PRZETWORNIK RTD, TC, R, U NA SYGNAŁ ANALOGOWY 4-20mA Z SEPARACJĄ GALWANICZNĄ. 2
 M-1TI PRECYZYJNY PRZETWORNIK RTD, TC, R, U NA SYGNAŁ ANALOGOWY 4-20mA Z SEPARACJĄ GALWANICZNĄ www.metronic.pl 2 CECHY PODSTAWOWE Przetwarzanie sygnału z czujnika na sygnał standardowy pętli prądowej 4-20mA
M-1TI PRECYZYJNY PRZETWORNIK RTD, TC, R, U NA SYGNAŁ ANALOGOWY 4-20mA Z SEPARACJĄ GALWANICZNĄ www.metronic.pl 2 CECHY PODSTAWOWE Przetwarzanie sygnału z czujnika na sygnał standardowy pętli prądowej 4-20mA
NX700 PLC www.atcontrol.pl
 NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
MiAcz2. Programowalne systemy przemysłowe automatyki PLC
 MiAcz2 Programowalne systemy przemysłowe automatyki PLC Programowalny sterownik logiczny WEJŚCIA PLC styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony do pamięci WYJŚCIA
MiAcz2 Programowalne systemy przemysłowe automatyki PLC Programowalny sterownik logiczny WEJŚCIA PLC styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony do pamięci WYJŚCIA
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
NX70 PLC www.atcontrol.pl
 NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
WSKAŹNIK WIELKOŚCI TECHNOLOGICZNYCH WWT-166
 A B T1 A T1 RS 232/485 T2 RS 232/485 T2 D C ZP CAN LZ 1 2 3 4 D ZP CAN LZ 1 2 3 4 24V= 24V= WWT-166-2-2.. WWT-166-2-3.. WWT-166-2-00 WWT-166-2-10 Zastosowanie Dzięki swobodnej konfiguracji wskaźnik WWT-166
A B T1 A T1 RS 232/485 T2 RS 232/485 T2 D C ZP CAN LZ 1 2 3 4 D ZP CAN LZ 1 2 3 4 24V= 24V= WWT-166-2-2.. WWT-166-2-3.. WWT-166-2-00 WWT-166-2-10 Zastosowanie Dzięki swobodnej konfiguracji wskaźnik WWT-166
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki
 Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Programowalny sterownik logiczny PLC
 AiS Programowalne układy przemysłowe automatyki Cz.2 (wybrane slajdy) 1 Programowalny sterownik logiczny PLC WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony
AiS Programowalne układy przemysłowe automatyki Cz.2 (wybrane slajdy) 1 Programowalny sterownik logiczny PLC WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony
Wyjścia analogowe w sterownikach, regulatorach
 Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy. Przebieg ćwiczenia
 Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
UWAGA. Wszystkie wyniki zapisywać na dysku Dane E: Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Zaliczenie - zagadnienia (aktualizacja )
") Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
CoDeSys 3 programowanie w języku drabinkowym LD
 Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Segmenty rynku sterowników
 Segmenty rynku sterowników Klasy sterowników Sterowniki mikro Sterowniki małe Sterowniki średnie Sterowniki duŝe Sterowniki bardzo duŝe Sterowniki firmy Siemens Logo! Rodzina S7-200 Rodzina S7-300 Rodzina
Segmenty rynku sterowników Klasy sterowników Sterowniki mikro Sterowniki małe Sterowniki średnie Sterowniki duŝe Sterowniki bardzo duŝe Sterowniki firmy Siemens Logo! Rodzina S7-200 Rodzina S7-300 Rodzina
Moduł wejść/wyjść VersaPoint
 Moduł obsługuje wyjściowe sygnały dyskretne 24VDC. Parametry techniczne modułu Wymiary (szerokość x wysokość x głębokość) Rodzaj połączeń 12.2mm x 120mm x 71.5mm (0.480in. x 4.724in. x 2.795in.) 2-, 3-
Moduł obsługuje wyjściowe sygnały dyskretne 24VDC. Parametry techniczne modułu Wymiary (szerokość x wysokość x głębokość) Rodzaj połączeń 12.2mm x 120mm x 71.5mm (0.480in. x 4.724in. x 2.795in.) 2-, 3-
Cyfrowy regulator temperatury
 Cyfrowy regulator temperatury Atrakcyjna cena Łatwa obsługa Szybkie próbkowanie Precyzyjna regulacja temperatury Bardzo dokładna regulacja temperatury Wysoka dokładność wyświetlania wartości temperatury
Cyfrowy regulator temperatury Atrakcyjna cena Łatwa obsługa Szybkie próbkowanie Precyzyjna regulacja temperatury Bardzo dokładna regulacja temperatury Wysoka dokładność wyświetlania wartości temperatury
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
Spis treści. Dzień 1. I Konfiguracja sterownika (wersja 1312) II Tryby pracy CPU (wersja 1312) III Bloki funkcyjne (wersja 1312)
 II Tryby pracy CPU (wersja 1312) III Bloki funkcyjne (wersja 1312)") Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1312) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Tworzenie nowego projektu I-5 Tworzenie stacji poprzez wybór CPU z katalogu I-6 Dodawanie modułów
Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1312) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Tworzenie nowego projektu I-5 Tworzenie stacji poprzez wybór CPU z katalogu I-6 Dodawanie modułów
Automatyka w Inżynierii Środowiska - Laboratorium Karta Zadania 1 ZASOBNIKOWY UKŁAD PRZYGOTOWANIA C.W.U.
 Automatyka w Inżynierii Środowiska - Laboratorium Karta Zadania 1 ZASOBNIKOWY UKŁAD PRZYGOTOWANIA C.W.U. Oprogramować programem narzędziowym TAC MENTA sterownik TAC XENTA 301 zasobnikowego układu przygotowania
Automatyka w Inżynierii Środowiska - Laboratorium Karta Zadania 1 ZASOBNIKOWY UKŁAD PRZYGOTOWANIA C.W.U. Oprogramować programem narzędziowym TAC MENTA sterownik TAC XENTA 301 zasobnikowego układu przygotowania
STEROWNIK WIELOFUNKCYJNY PSW-166
 A B T1 G B T1 RS 232/485 T2 RS 232/485 T2 D C ZP CAN LZ 1 2 3 4 H C ZP CAN LZ 1 2 3 4 24V= 24V= PSW-166-2-1.. PSW-166-2-0.. PSW-166-2-2.. Zastosowanie Dzięki swobodnej konfiguracji sterownik PSW-166 umożliwia
A B T1 G B T1 RS 232/485 T2 RS 232/485 T2 D C ZP CAN LZ 1 2 3 4 H C ZP CAN LZ 1 2 3 4 24V= 24V= PSW-166-2-1.. PSW-166-2-0.. PSW-166-2-2.. Zastosowanie Dzięki swobodnej konfiguracji sterownik PSW-166 umożliwia
Siemens S7-1200 Konfiguracja regulatora PID
 Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy
 PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
Kurs STARTER S5. Spis treści. Dzień 1. III Budowa wewnętrzna, działanie i obsługa sterownika (wersja 0504)
") I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
" Sterowniki programowalne f.1/1
 PLC, Programowalne sterowniki logiczne PLC, Programowalny sterownik logiczny (ang. Programmable Logic Controller) to wyspecjalizowane urządzenie mikroprocesorowe wyposażone w programowalną pamięć, sterownik
PLC, Programowalne sterowniki logiczne PLC, Programowalny sterownik logiczny (ang. Programmable Logic Controller) to wyspecjalizowane urządzenie mikroprocesorowe wyposażone w programowalną pamięć, sterownik
Realizacje regulatorów PID w sterownikach PLC Siemens S7-1200
 D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
Pomiary temperatury. Precyzyjne regulatory mikroprocesorowe serii TROL9300 i TROL2500
 Opis produktu Precyzyjne regulatory mikroprocesorowe serii TROL9300 i TROL2500 regulacja Fuzzy logic + PID wysokiej dokładności (18-bit) wejście A / D wysokiej dokładności (15-bit) wyjście D / A 4 cyfrowy
Opis produktu Precyzyjne regulatory mikroprocesorowe serii TROL9300 i TROL2500 regulacja Fuzzy logic + PID wysokiej dokładności (18-bit) wejście A / D wysokiej dokładności (15-bit) wyjście D / A 4 cyfrowy
Sterowniki programowalne
 Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
Sterowniki Programowalne (SP) Wykład #4
 Wykład #4") Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Rozdział 22 Regulacja PID ogólnego przeznaczenia
 Rozdział 22 Regulacja ogólnego przeznaczenia 22.1 Wstęp do regulacji Metodologia otwartej pętli może być odpowiednia dla większości zastosowań dotyczących sterowania procesami. Dzieje się tak z uwagi na
Rozdział 22 Regulacja ogólnego przeznaczenia 22.1 Wstęp do regulacji Metodologia otwartej pętli może być odpowiednia dla większości zastosowań dotyczących sterowania procesami. Dzieje się tak z uwagi na
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI
 Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI") Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Sterowniki programowalne. System GE Fanuc serii 90-30 Zasady działania systemu (część I)
") Wykład w ramach przedmiotu Sterowniki programowalne System GE Fanuc serii 90-30 Zasady działania systemu (część I) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski Plan wykładu
Wykład w ramach przedmiotu Sterowniki programowalne System GE Fanuc serii 90-30 Zasady działania systemu (część I) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski Plan wykładu
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
Sterowniki PLC. Elektrotechnika II stopień Ogólno akademicki. przedmiot kierunkowy. Obieralny. Polski. semestr 1
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E2T-09-s2 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable Logic
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E2T-09-s2 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable Logic
Ćwiczenie PA9. Badanie układu regulacji ciśnienia w zbiorniku ze sterownikiem PLC SIMATIC
 - laboratorium Ćwiczenie PA9 Badanie układu regulacji ciśnienia w zbiorniku ze sterownikiem Instrukcja laboratoryjna Opracował : mgr inŝ. Łukasz Tabor Człowiek - najlepsza inwestycja Projekt współfinansowany
- laboratorium Ćwiczenie PA9 Badanie układu regulacji ciśnienia w zbiorniku ze sterownikiem Instrukcja laboratoryjna Opracował : mgr inŝ. Łukasz Tabor Człowiek - najlepsza inwestycja Projekt współfinansowany
Język FBD w systemie Concept
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym
 Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym Zakład Napędu Elektrycznego ISEP PW Wstęp Sterowniki swobodnie programowalne S7-300 należą do sterowników średniej wielkości. Są
Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym Zakład Napędu Elektrycznego ISEP PW Wstęp Sterowniki swobodnie programowalne S7-300 należą do sterowników średniej wielkości. Są
HEXT240C114 ASTOR KATALOG SYSTEMÓW STEROWANIA HORNER APG
 KATALOG SYSTEMÓW STEROWANIA HORNER APG ASTOR 24 wejścia dyskretne 12/24 VDC 16 wyjść dyskretnych 0.5 A 2 wejścia analogowe 0-10 VDC, 0-20 ma, 4-20 ma Dotykowy, graficzny ekran 128 x 160 pikseli 4 klawisze
KATALOG SYSTEMÓW STEROWANIA HORNER APG ASTOR 24 wejścia dyskretne 12/24 VDC 16 wyjść dyskretnych 0.5 A 2 wejścia analogowe 0-10 VDC, 0-20 ma, 4-20 ma Dotykowy, graficzny ekran 128 x 160 pikseli 4 klawisze
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Sterowniki PLC. Sterowniki PLC. Wprowadzenie nazewnictwo. Historia. Dlaczego sterowniki PLC stały się tak popularne?
 Sterowniki PLC Wprowadzenie nazewnictwo Sterownik PLC (Programmable Logic Controller) Sterownik SPS (Speicherprogrammierbare Steuerung) Programowalny sterownik logiczny (sterownik programowalny) Sterownik
Sterowniki PLC Wprowadzenie nazewnictwo Sterownik PLC (Programmable Logic Controller) Sterownik SPS (Speicherprogrammierbare Steuerung) Programowalny sterownik logiczny (sterownik programowalny) Sterownik
Sterownik programowalny MS 120 Certyfikat
 Krótki opis Sterownik MS120 przeznaczony jest do komór parzelniczych, wędzarniczych, dojrzewalniczych oraz komór schładzania szokowego. Można go również wykorzystać w urządzeniach rozmrażających lub mrożących.
Krótki opis Sterownik MS120 przeznaczony jest do komór parzelniczych, wędzarniczych, dojrzewalniczych oraz komór schładzania szokowego. Można go również wykorzystać w urządzeniach rozmrażających lub mrożących.
Wejścia logiczne w regulatorach, sterownikach przemysłowych
 Wejścia logiczne w regulatorach, sterownikach przemysłowych Semestr zimowy 2013/2014, WIEiK PK 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika
Wejścia logiczne w regulatorach, sterownikach przemysłowych Semestr zimowy 2013/2014, WIEiK PK 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika
M-1TI. PROGRAMOWALNY PRECYZYJNY PRZETWORNIK RTD, TC, R, U / 4-20mA ZASTOSOWANIE:
 M-1TI PROGRAMOWALNY PRECYZYJNY PRZETWORNIK RTD, TC, R, U / 4-20mA Konwersja sygnału z czujnika temperatury (RTD, TC), rezystancji (R) lub napięcia (U) na sygnał pętli prądowej 4-20mA Dowolny wybór zakresu
M-1TI PROGRAMOWALNY PRECYZYJNY PRZETWORNIK RTD, TC, R, U / 4-20mA Konwersja sygnału z czujnika temperatury (RTD, TC), rezystancji (R) lub napięcia (U) na sygnał pętli prądowej 4-20mA Dowolny wybór zakresu
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Literatura Ryszard Pełka: Mikrokontrolery - architektura, programowanie, zastosowania Projektowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Literatura Ryszard Pełka: Mikrokontrolery - architektura, programowanie, zastosowania Projektowanie
Regulator napięcia transformatora
 Regulator napięcia transformatora Zastosowanie Regulator RNTr-1 Wykorzystywany jest do stabilizacji napięcia na stacjach elektroenergetycznych lub końcach energetycznych linii przesyłowych. Przeznaczony
Regulator napięcia transformatora Zastosowanie Regulator RNTr-1 Wykorzystywany jest do stabilizacji napięcia na stacjach elektroenergetycznych lub końcach energetycznych linii przesyłowych. Przeznaczony
Sterowniki PLC seria NX700
 Sterowniki PLC seria NX700 Jednostki centralne CPU Pamięć programu 20K kroków (wbudowana), obsługa 1600 punktów (12 slotów i 1 rozszerzenie) lub do 2048 punktów w systemie oddalonych wejść/wyjść, 0,2 usek/instrukcję,
Sterowniki PLC seria NX700 Jednostki centralne CPU Pamięć programu 20K kroków (wbudowana), obsługa 1600 punktów (12 slotów i 1 rozszerzenie) lub do 2048 punktów w systemie oddalonych wejść/wyjść, 0,2 usek/instrukcję,
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Sterowniki programowalne Programmable Controllers. Energetyka I stopień Ogólnoakademicki. przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca)
") Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca) tryb niskiego poboru mocy przełączanie źródeł zasilania łagodny start pamięć i zarządzanie awariami zmiana (nastawa) sygnału odniesienia
Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca) tryb niskiego poboru mocy przełączanie źródeł zasilania łagodny start pamięć i zarządzanie awariami zmiana (nastawa) sygnału odniesienia
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
E-E-A-1008-s6. Sterowniki PLC. Elektrotechnika I stopień Ogólno akademicki. kierunkowy (podstawowy / kierunkowy / inny HES)
") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s6 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s6 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Automatyka przemysłowa na wybranych obiektach. mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław
 Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
PROJEKT WSPÓŁFINANSOWANY ZE ŚRODKÓW UNII EUROPEJSKIEJ W RAMACH EUROPEJSKIEGO FUNDUSZU SPOŁECZNEGO OPIS PRZEDMIOTU. Sieci i sterowniki przemysłowe
 OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Układy sterowania: a) otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)
 otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)") Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
1.3 STEROWNIKI XLe Z PORTEM SIECI CAN
 1.3 STEROWNIKI XLe Z PORTEM SIECI CAN HEXE220C112-12 wejść dyskretnych (12/24 VDC), 6 wyjść przekaźnikowych, 4 wejścia analogowe (0 10 VDC, 0 20 ma, 4 20 ma), ekran operatorski, 128 x 64 piksele, 20 klawiszy
1.3 STEROWNIKI XLe Z PORTEM SIECI CAN HEXE220C112-12 wejść dyskretnych (12/24 VDC), 6 wyjść przekaźnikowych, 4 wejścia analogowe (0 10 VDC, 0 20 ma, 4 20 ma), ekran operatorski, 128 x 64 piksele, 20 klawiszy
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Wykład nr 3 Budowa i działanie komputerowego systemu sterowania
 Wykład nr 3 Budowa i działanie komputerowego systemu sterowania Działanie komputerowego systemu sterowania Charakterystyka elementów komputerowego systemu sterowania Wyczerpujący przykład : sterowanie
Wykład nr 3 Budowa i działanie komputerowego systemu sterowania Działanie komputerowego systemu sterowania Charakterystyka elementów komputerowego systemu sterowania Wyczerpujący przykład : sterowanie
Standardowe bloki funkcjonalne
 Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
E-4EZA1-10-s7. Sterowniki PLC
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-4EZA1-10-s7 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-4EZA1-10-s7 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Aparatura kontrolno-pomiarowo-sterująca GEFRAN: Regulatory temperatury i ciśnienia
 Aparatura kontrolno-pomiarowo-sterująca GEFRAN: Regulatory temperatury i ciśnienia 1 Regulatory temperatury i ciśnienia: 40T72 PID pojedyńcze wyświetlanie - wymiar 72x36 mm uniwersalne wejścia wyjścia:
Aparatura kontrolno-pomiarowo-sterująca GEFRAN: Regulatory temperatury i ciśnienia 1 Regulatory temperatury i ciśnienia: 40T72 PID pojedyńcze wyświetlanie - wymiar 72x36 mm uniwersalne wejścia wyjścia:
IC200UDD110 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO
 IC200UDD110 16 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 12 wyjść tranzystorowych 24 VDC. Porty: RS232, RS485. Zasilanie: 24 VDC. Sterownik VersaMax Micro
IC200UDD110 16 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 12 wyjść tranzystorowych 24 VDC. Porty: RS232, RS485. Zasilanie: 24 VDC. Sterownik VersaMax Micro
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
REGULATOR NAGRZEWNICY ELEKTRYCZNEJ STR-NE DOKUMENTACJA TECHNICZNA INSTRUKCJA
 REGULATOR NAGRZEWNICY ELEKTRYCZNEJ STR-NE DOKUMENTACJA TECHNICZNA INSTRUKCJA Białystok 2014r INFORMACJE OGÓLNE Dane techniczne: - zasilanie 230V AC 50Hz - pobór mocy: maksymalnie 6W - sposób montażu: szyna
REGULATOR NAGRZEWNICY ELEKTRYCZNEJ STR-NE DOKUMENTACJA TECHNICZNA INSTRUKCJA Białystok 2014r INFORMACJE OGÓLNE Dane techniczne: - zasilanie 230V AC 50Hz - pobór mocy: maksymalnie 6W - sposób montażu: szyna