Rola monitorowania i prognozowania parametrów orientacji przestrzennej Ziemi ze szczególnym uwzględnieniem współrzędnych bieguna ziemskiego
|
|
|
- Damian Niemiec
- 7 lat temu
- Przeglądów:
Transkrypt
1 Rola monitorowania i prognozowania parametrów orientacji przestrzennej Ziemi ze szczególnym uwzględnieniem współrzędnych bieguna ziemskiego Wiesław Kosek 1) Wydział Inżynierii Środowiska i Geodezji Uniwersytetu Rolniczego w Krakowie 2) Centrum Badań Kosmicznych Polskiej Akademii Nauk, Warszawa III Plenarne posiedzenie Komitetu Geodezji PAN, 17 kwietnia 212
2 Streszczenie Ziemski i niebieski system współrzędnych odniesienia oraz transformacja pomiędzy nimi, parametry ruchu obrotowego Ziemi, techniki geodezji kosmicznej i satelitarnej Prognozowanie zmian EOP: aktywność międzynarodowa Analiza zmian współrzędnych x, y bieguna ziemskiego oraz ich geofizycznego pobudzenia z wykorzystaniem analizy falkowej Analiza prognozowanie współrzędnych bieguna ziemskiego metodą LS+AR oraz przyczyny błędów prognozy współrzędnych x, y bieguna ziemskiego Analiza statystyczna odchyłek prognoz współrzędnych x, y bieguna ziemskiego Wnioski
3 Kierunek chwilowej oś obrotu Ziemi nie jest stały ani w przestrzeni ani też względem bryły Ziemi. Zmiany tego kierunku mogą być obecnie modelowane z wysoką dokładnością w przypadku precesji i nutacji, natomiast w ruch bieguna ziemskiego występuje wiele zmian, które nie dadzą się zamodelować tak dokładnie jak precesja i nutacja Ziemi Szybkość kątowa Ziemi nie jest także stała i dokładność modelowania jej jest tego samego rzędu co ruchu bieguna ziemskiego.
4 Parametrami transformacji pomiędzy ziemskim i niebieskim systemami odniesienia są parametry ruchu obrotowego Ziemi (EOP Earth Orientation Parameters), do których należą: - model precesyjno-nutacyjny + poprawki precesyjno-nutacyjne (dx, dy), - współrzędne bieguna ziemskiego (x p, y p ), - czas uniwersalny UT1-UTC. Y
5 Perturbacje w ruchu obrotowym Ziemi Składowe równikowe, które pokazują zmiany kierunku osi obrotu Ziemi - w przestrzeni - precesja i nutacja (wyrażona przez model precesyjno-nutacyjny + poprawki obserwacyjne dx,dy) - względem bryły Ziemi - ruch bieguna ziemskiego (wyrażony przez współrzędne x, y bieguna) Składową osiową, która pokazuje zmiany szybkości kątowej Ziemi (wyrażona jest przez zmianę czasu uniwersalnego UT1-UTC lub zmianę długości doby ziemskiej Δ)
6 Modele precesji i nutacji Do końca 22 roku obowiązywały model precesji IAU 1976 oraz model nutacji IAU stycznia 23 r modele te zostały zastąpione łącznym modelem precesyjno-nutacyjnym IAU2A, który zawiera zawiera 678 współczynników luni-solarnych oraz 687 współczynników planetarnych. Dokładność kierunku osi bieguna niebieskiego dla tego modelu wynosi.2 mas. Nowy model precesyjno-nutacyjny uwzględnia niejednorodny rozkład gęstości mas wewnątrz Ziemi. W 26 roku wprowadzony został nowy model precesji, który zastąpił poprzedni model precesji z 1976 roku w modelu precesyjno-nutacyjnym z 2r.
7 Ruch bieguna Ziemskiego i czas UT1-UTC Ruch bieguna ziemskiego jest ruchem chwilowej osi obrotu względem bryły Ziemi, a umownie jest to ruch niebieskiego bieguna pośredniego (Celestial Intermediate Pole CIP) w układzie ITRF związanym z Ziemią. Czas UT1-UTC lub jego pierwsza pochodna po czasie Δ opisują niejednostajny obrót Ziemi wokół własnej osi. Parametry ruchu obrotowego Ziemi nie mogą być teoretyczne modelowane dlatego muszą być wyznaczane z obserwacji.
8 arcsec.3 x y s DaneEOP 1.2 UT1-UTC s R YEARS arcsec dx dy
9 Podstawowe techniki pomiarowe geodezji satelitarnej i kosmicznej SLR- Satellite Laser Ranging LLR - Lunar Laser Ranging GPS Global Positioning System GLONASS- Globalnaja Nawigacionnaja Sputnikowaja Sistiema GALILEO COMPASS GNSS (Global Navigation Satellite System) DORIS- Doppler Orbitography and Radiopositioning Integrated by Satellite PRARE- Precise Range and Range-Rate Equipment VLBI- Very Long Baseline radio Interferometry

10 SLR

11 DORIS Sieć stacji systemu DORIS rozmieszczona jest równomiernie na całym globie Ziemskim. Połowa stacji systemu DORIS znajduje się na wyspach. Dane pomiarowe zbierane na satelicie przekazywane są następnie do stacji kontrolnej w Tuluzie.
12 GNSS
13 VLBI
14 Do lat 7-tych ubiegłego stulecia x, y i UT1-UTC wyznaczane były wyłącznie metodą astrometrii optycznej. Obecnie wyznaczane są z obserwacji technik geodezji satelitarnej i kosmicznej: 1. VLBI (Very Long Baseline radio Interferometry) realizuje podstawowy układ współrzędnych niebieskich ICRF jedyna technika wyznaczająca parametry nutacyjne dx, dy oraz czas uniwersalny UT1-UTC 2. SLR (Satellite Laser Ranging) wyznacza x, y, (brak długookresowej stabilności wyznaczeń czasu UT1-UTC) wyznacza współczynniki pola grawitacyjnego Ziemi oraz współrzędne geocentrum 3. GNSS (Global Navigation Satellite System) wyznaczanie x, y, Δ z rozdzielczością czasową 1 dzień, wyznaczenie współrzędnych geocentrum. 4. LLR (Lunar Laser Ranging), wyznaczenie UT 5. DORIS (Doppler Orbitography and Radiopositioning Integrated by Satellites), wyznacza x, y, Δ, współrzędne geocentrum.

15 Udziałposzczególnych technik geodezji kosmicznej i satelitarnej przy wyznaczaniu kombinowanych parametrów ruchu obrotowego Ziemi przez IERS
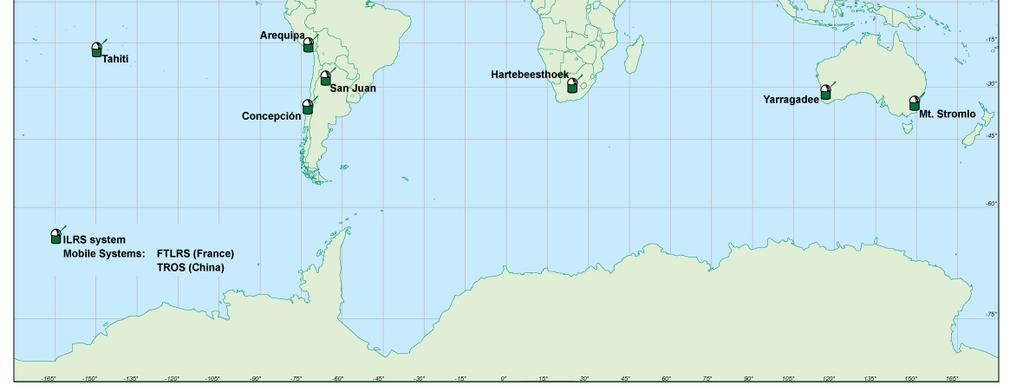
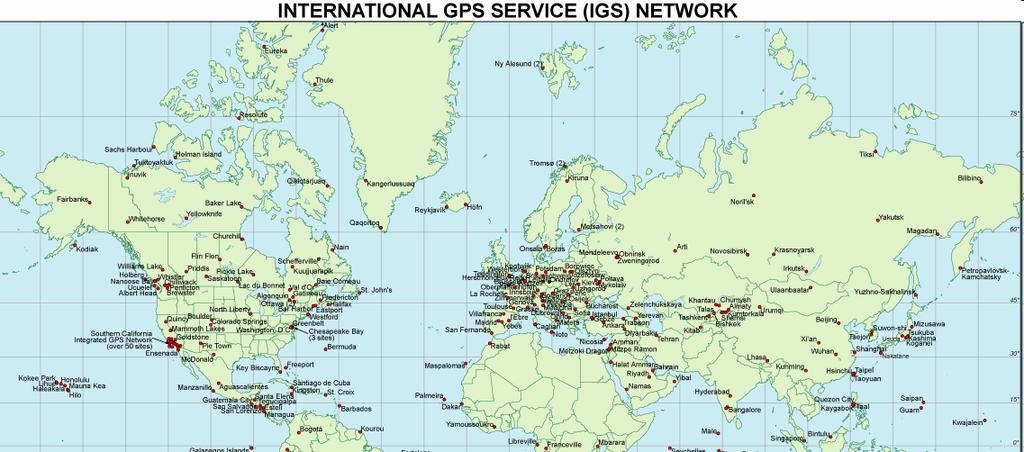
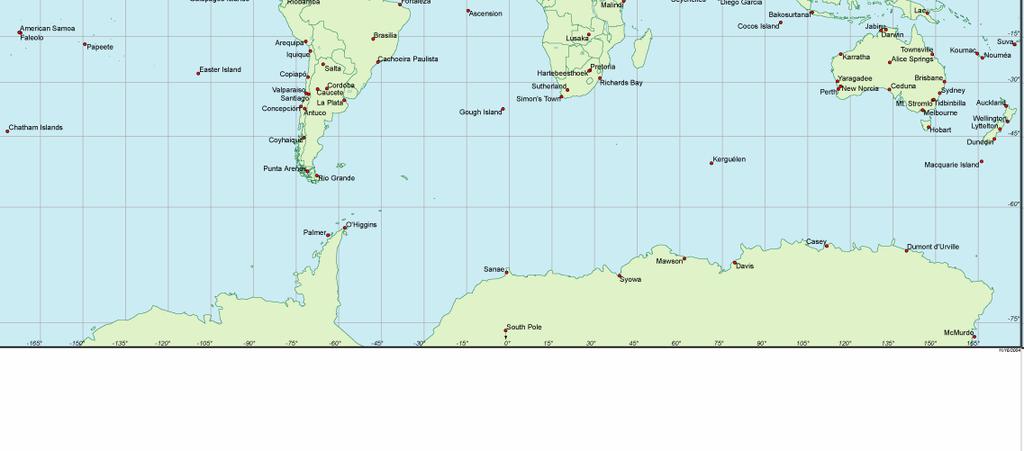
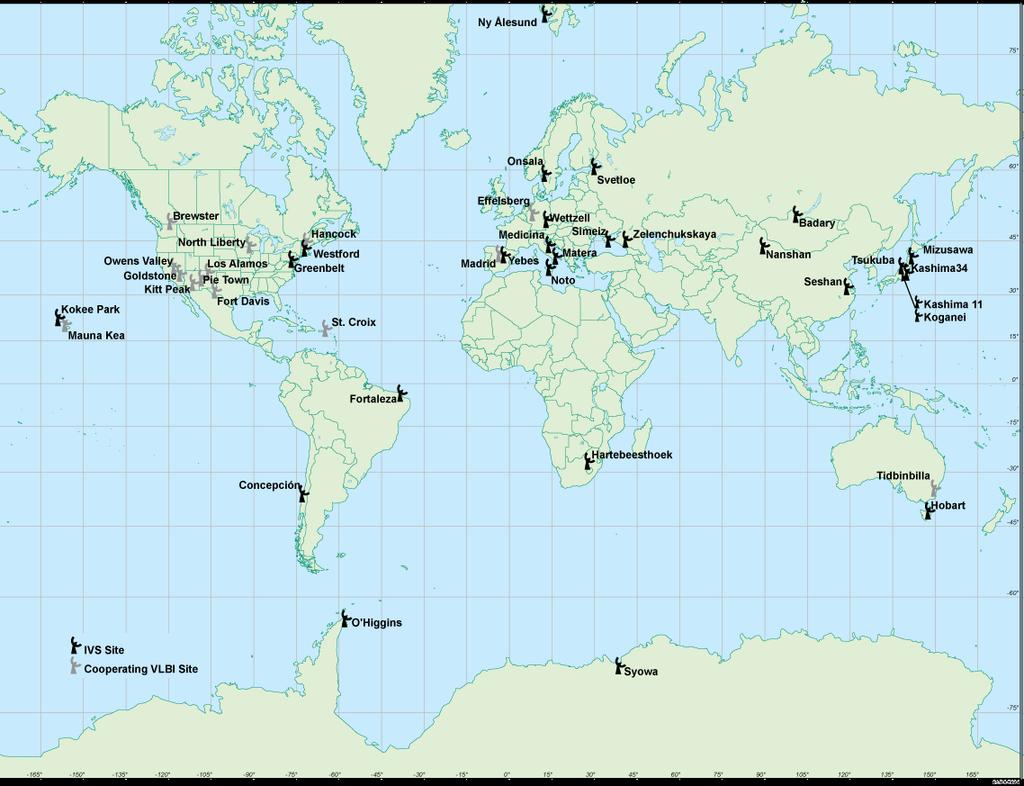
16 Międzynarodowe służby technik geodezji satelitarnej i kosmicznej : IGS (InternationalGPS Service), : IVS (International VLBI Service for Geodesy andastrometry), : ILRS (InternationalLaser RangingService), - 23: IDS (InternationalDORIS Service),
17 International Terrestrial Reference System Od 1991 roku zgodnie z rezolucją Generalnego Zgromadzenia IUGG w Wiedniu obowiązującym systemem odniesienia stał się Conventional Terrestrial Reference System (CTRS). Początkiem CTRS jest środek masy Ziemi z uwzględnieniem oceanów i atmosfery. Jest to system geocentryczny, którego jednostką jest m (SI), a orientacja osi zgodna z orientacją osi systemu BTS84 (BIH Terrestrial System 84), zaś zmienność tej orientacji w czasie jest określona przez zastosowanie warunku, że suma ruchów poziomych płyt tektonicznych nie zawiera składowej obrotu. Systemowi nadano później nazwę (International Terrestrial Reference System (ITRS). Realizacją systemu ITRS jest układ odniesienia International Terrestrial Reference Frame (ITRF): Układy ITRF88, ITRF89,, ITRF96, ITRF97, ITRF2, ITRF25 i ITRF28, zostały wyznaczone z obserwacji technik VLBI, SLR, LLR, GNSS i DORIS.
18
19 Niebieskie systemy i układy odniesienia Od 1 stycznia 1988r do 31 grudnia 1997r konwencjonalny niebieski system odniesienia zdefiniowany był przez równik Ziemski i punkt równonocy na epokę J2, a odpowiadającym temu systemowi katalogiem gwiazd był katalog FK5 (1535 gwiazd, dokładność 2mas). Początkiem tego systemu byłśrodek masy Ziemi. Oś Z tego systemu skierowana była od środka masy Ziemi w kierunku bieguna północnego, natomiast oś X skierowana była do punktu równonocy. Z Pozycje gwiazd i kwazarów podawane było w układzie sferycznym: α - rektazcenzja δ - deklinacja X α δ punkt równonocy ekliptyka równik Y
20 International CelestialReference System Od 1 stycznia 1998 roku system FK5 został zastąpiony przez ICRS, który stał się obowiązującym niebieskim systemem odniesienia. Realizacją systemu ICRS jest układ ICRF wyznaczony przez współrzędne radioźródeł obserwowanych techniką VLBI z dokładnością.7mas. Kierunki osi systemu ICRS zdefiniowane są przez pozycje kwazarów, gdyż zakłada się, że nie posiadają one ruchów własnych. Początkiem systemu ICRS jest barycentrum Układu Słonecznego (w systemie BCRS Baricentric Celestial Reference System) lub geocentrum (w systemie GCRS Geocentric Celestial Reference System). Pierwszą realizacją ICRS był katalog ICRF zdefiniowany jest przez 68 kwazarów podstawowych oraz 212 innych radioźródeł obserwowanych techniką VLBI. Orientacja osi układu ICFR była określona z dokładnością.2mas.
21 ICRF2 W sierpniu 29r XXVII Zgromadzenie Generalne IAU podjęło decyzję o wprowadzeniu z dniem 1 stycznia 21 układu ICRF2 jako fundamentalnego niebieskiego układu współrzędnych odniesienia. ICRF2 realizowany jest obecnie przez 3414 radioźródeł (około 5 razy więcej niż ICRF). Dokładność kierunków osi układu wynosi 4 µas i jest 5 6 razy lepsza niż dla ICRF. Dokładność ta zapewniona jest dzięki jednostajnie rozłożonym na niebie 295 radioźródłom definiującym system.
22 Niebieski układ współrzędnych odniesienia (ICRF2) równik A sky map of the 295 defining sources of ICRF2.
23 ICRF ICRF2
24 PROGNOZOWANIE ZMIAN EOP W celu uzyskania informacji o pozycji obiektu znajdującego się poza rotującą Ziemią należy wiedzieć jak mają się do siebie współrzędne stacji obserwacyjnej określone w układzie ziemskim względem współrzędnych tego obiektu określonych w układzie niebieskim. Obserwacje technikami: VLBI, SLR, GNSS, DORIS pozwalają obecnie na wyznaczanie układów niebieskiego i ziemskiego z wysoką dokładnością, jednak nie pozwalają na wyznaczenie parametrów orientacji Ziemi w czasie rzeczywistym. Nawiązanie układów w czasie rzeczywistym jest możliwe dzięki prognozom parametrów orientacji Ziemi (x, y, UT1-UTC, dx, dy).
25 IERS Rapid Service/Prediction Centre Obserwacje technikami: VLBI, SLR, GNSS, DORIS nie pozwalająna wyznaczenie parametrów orientacji Ziemi w czasie rzeczywistym dlatego konieczne jest ich prognozowanie. Wyznaczaniem prognoz EOP zajmuje się IERS RS/PC w US Naval Observatory w Waszyngtonie: - UT1-UTC prognozowany jest z wykorzystaniem prognozy składowej osiowej momentu pędu atmosfery (Johnson et al., 25) otrzymywanej w procesie dynamicznego wyznaczenia modelu cyrkulacji atmosfery. - współrzędne x, y bieguna prognozowane są kombinacją metody najmniejszych kwadratów i autoregresji (LS+AR) (Kosek i in., 24). - obecna dokładność modelu precesji-nutacji IAU 26/2A jest bardzo wysoka dlatego residua precesji-nutacji dx, dy pokazują jedynie niedeterministyczny sygnał z okresem ok. 43 dni i o amplitudzie rzędu.3 mas pochodzący od rotacji ciekłego jądra Ziemi. Prognoza precesji i nutacji wyznaczana jest jako ekstrapolacja modelu IAU 26/2A.
26 DEEP SPACE NETWORK Prognozy EOP wykorzystywane sąs między innymi przez NASA Deep Space Network (DSN), która jest siecią anten służąs żących do kontroli: - misji międzyplanetarnych (Cassini, Opportunity, Spirit, Mars Global Serveyor, Rosetta, Stardust, Voyager-1, Voyager-2)., - radiowych i radarowych obserwacji astronomicznych, - niektórych okołoziemskich oziemskich misji kosmicznych. DSN jako największy i najlepiej wyposażonym onym systemem telekomunikacyjny na świecie składa się z trzech kompleksów komunikacyjnych - Goldstone, California,, pustynia Mojave; ; (Goldstone( Signal Processing Centre) - Madrid, Spain; ; (Robledo( Signal Processing Centre) - Canberra, Australia. (Tidbinbilla Signal Processing Centre)




27 Goldstone, California, pustynia Mojave Madrid, Spain Deep Space Network Canberra, Australia.
28 Determination errors of x, y and UT1-UTC (EOPC4_IAU2.62-now) data in YEARS x [mas] y [mas] UT1 [ms] ~2mm EOP mean prediction errors and their ratio to determination errors in 21 Days in the future x, y [mas] UT1-UTC [ms] prediction to determination errors ratio x, y UT1-UTC ~4 ~24 ~2 ~14 ~5 ~72 ~9 ~14 ~14 ~26
29 Czynniki wpływające na wzrost błędu prognozy parametrów orientacji Ziemi Zmian nieregularne o charakterze szerokopasmowym we współrzędnych x, y bieguna ziemskiego i zmianach czasu UT1-UTC, pobudzane zmianami składowych równikowych momentu pędu atmosfery i oceanu dla x,y oraz składową osiową momentu pędu atmosfery dla UT1. Zmienne w czasie amplitudy i fazy oscylacji Chandlera, rocznej i półrocznej we współrzędnych x, y bieguna ziemskiego oraz oscylacji rocznej i półrocznej w zmianach długości doby Δ lub UT1-UTC.
30 Prognozowanie EOP aktywność międzynarodowa Earth Orientation Parameters Prediction Comparison Campaign (EOPPCC) (Oct. 25 Mar. 28) [H. Schuh(Chair), W. Kosek, M. Kalarus] Celem było porównanie rezultatów prognoz zmian EOP wyznaczanych różnymi metodami oraz przy użyciu różnych danych. W czasie tej kampanii około 1 uczestników dostarczało cotygodniowe prognozy zmian EOP. IERS Working Group on Predictions (WGP) (Apr.26 EGU Oct. 29) [W. Wooden (Chair), T. Van Dam (input data), W. Kosek (algorithms)] Celem WGP było pokazanie mocnychi słabychstron różnych algorytmów prognozowania,a także jakości różnych danych, z których wyznaczano prognozy zmian EOP. IERS Workshop on EOP Combination and Prediction (Warsaw, October 29) [W. Kosek, B. Wooden (Chairs)] Celem było przedstawienie obecnego stanu wiedzy dotyczącej prognozowania zmian EOP pod katem stosowanych algorytmów prognozowania oraz danych, określenia działań zmierzających do poprawienia dokładności prognozy oraz udokładnienia kombinowanych szeregów czasowych zmian EOP. Earth Orientation Parameters Combination of Prediction Pilot Project (EOPCPPP) (Oct. 21 IERS Directing Board) [Chair: B. Luzum, co-chair: W. Kosek], Celem tej kampanii jestopracowanie algorytmów do wyznaczania kombinowanych prognoz zmian EOP na podstawie prognoz tych zmian dostarczanych codziennie przez różnych uczestników projektu.
31 Wyniki EOPPCC (Oct. 25 Mar. 28) Mean prediction errors (in mas) of x, y pole coordinates data computed from prediction results of different algorithms participating in the EOPPCC.
32 Wyniki EOPPCC (Oct. 25 Mar. 28) Mean prediction errors (in ms/day & ms) of length of day and UT1-UTC data computed from prediction results of different algorithms participating in the EOPPCC.
33 Ważniejsze wnioski z kampanii Earth Orientation Parameters Prediction Comparison Campaign (EOPPCC) 1) Najdokładniejszą techniką prognozowania współrzędnych x,y bieguna ziemskiego jest kombinacja metody najmniejszych kwadratów z metodą autoregresji. 2) Najdokładniejsza metodą dla prognozowania zmian UT1-UTC i Δ jest filtracja Kalmana z wykorzystaniem prognoz składowej osiowej momentu pędu atmosfery. 3) Kombinowane prognozy współrzędnych x, y bieguna ziemskiego mają wyższą dokładność niż prognozy wyznaczane różnymi technikami.
34
35 IERS Working Group on Prediction This IERS WG on Prediction is designed to build upon the foundation laid by the Prediction Comparison Campaign (PCC) and also investigate the new data sets from the Combination Pilot Project. A major task of the working group will be to determine what prediction products are useful to the user community in addition to making a detailed examination of the fundamental properties of the different input data sets and algorithms. It should be noted that the Working Group will not repeat the PCC`s efforts. Taken together, the PCC and the Working Group create the potential for advancing the Earth orientation community`s understanding and allow for the creation of state-of-the-art prediction. It is expected that new improved products resulting from this analysis will replace some of the existing prediction products. (For more details, please consult the WG Charter.) WG Chair William Wooden Sub - WG Chair Input Data: Tonie Van Dam Algorithms: Wieslaw Kosek Members Data Subgroup: (Apr. 26 Oct. 29) Jianli Chen Daniel Gambis Richard Gross Brian Luzum Jim Ray David Salstein Algorithms Subgroup: Thomas Johnson Maciej Kalarus Hansjoerg Kutterer Sebastien Lambert Zinovy Malkin Harald Schuh
36 IERS Workshop on EOP Combination and Prediction Warsaw, Poland, October29 Recommendations określićwymagane dokładności prognoz zmian EOP dla różnych zastosowań. zalecićwyznaczanie prognoz dwutygodniowych zmian EOP oraz kontynuacja rocznych prognoz zmian EOP zalecićwyznaczanie kombinowanych prognoz zmian EOP na podstawie prognoz tych zmian wyznaczanych przez różne światowe centra obliczeniowe, które przerodziłyby sięw przyszłą służbę IERS wyznaczania prognoz kombinowanych. zalecićwyznaczanie prognoz krótkoterminowych geofizycznych funkcji pobudzenia współrzędnych bieguna ziemskiego oraz zmian czasu uniwersalnego, oraz określićjakośćposzczególnych geofizycznych funkcji pobudzenia wyznaczanych w różnych światowych ośrodkach obliczeniowych.

37 EOPCPPP strona www w USNO

38 EOPCPPP strona www w CBK PAN
39 EOPCPPP (Oct 21 Dec 211) Mean absolute errors (MAE) and standard deviations (SD) computed by different participants of the project. Ensemble prediction (red).
40 Analiza zmian współrzędnych x, y bieguna ziemskiego oraz ich prognozowania metodą LS+AR
41 DATA x, y data from the IERS: EOPC4_IAU2.62-now ( ), t = 1 day, Equatorial components of atmospheric angular momentum from NCEP/NCAR, aam.ncep.reanalysis.* ( ) t =.25 day, ftp://ftp.aer.com/pub/anon_collaborations/sba/, Equatorial components of ocean angular momentum: c2171.oam (Jan Mar. 22) t = 1 day, ECCO_kf8.oam (Jan Dec. 211), t = 1 day, Equatorial components of effective angular momentum function of the hydrology obtained by numerical integration of water storage data from NCEP: water_ncep_1979.dat, water_ncep_198.dat,, water_ncep_21.dat, t = 1 day, ftp://ftp.csr.utexas.edu/pub/ggfc/water/ncep.
42 IERS 8C4 x, y pole coordinates data mas y x
43 Zastosowanie analizy falkowejdo analiz zmian x,yoraz ich geofizycznego pobudzenia Obecnie analiza falkowaumożliwia badanie szeregów czasowych x,ybieguna ziemskiego zarówno w czasie jak i częstotliwości poprzez wyznaczenie współczynników transformaty falkowej Znając współczynniki transformaty falkowej można wyznaczyć dla zespolonego szeregu czasowego x iy -zmienne w czasie amplitudy i fazy wybranych oscylacji, widma mocy, polaryzacje, -korelacje w funkcji częstotliwości (tzw. semblancje) pomiędzy współrzędnymi x, y bieguna a współrzędnymi modelowymi wyznaczonymi z funkcji pobudzenia ośrodków ciekłych Stosując technikęfalkowąmożna także dokonaćdekompozycji zespolonego szeregu czasowego na składowe częstotliwościowe i badaćich wpływ na błędy prognozowania tych szeregów
44 Pole coordinates spectra 1.4E+1 1.2E+1 1.E+1 8.E+9 6.E+9 4.E+9 2.E+9 Morlet Wavelet spectra.e period (days) 3E+7 Morlet Wavelet spectra 2E+7 1E+7 E period (days) The Morlet wavelet spectra of x,y IERS 8C4 pole coordinates data computed for different σ parameter values. Time span of data:
 2. 1.8 1.6 1.4 1.2 1..8.6.4.2. -.2 -.")

45 The module of x - iy pole coordinates data computed by the Morlet Wavelet Transform period (years) arcsec years
46 Amplitudes and phases of the most energetic oscillations in x, y pole coordinates data Amplitudes arcsec Chandler Annual Phases years 24 o years Semi-annual bold line prograde thin line - retrograde Chandler Annual Semi-annual
47 x, y pole coordinates model data computed from fluid excitation functions Differential equation of polar motion: i σ ch m& ( t) + m( t) = χ( t) m( t) = x( t) iy( t) χ ( t) = χ ( t) + iχ ( t) 1 2 σ = 2π i Q 1 + ch T ch 2 - model pole coordinates - equatorial excitation functions corresponding to AAM, OAM, AAM+OAM and AAM+OAM+HAM excitation functions - complex-valued frequency, where T ch = 433 days and Q = 17 Approximate solution of this equation in discrete time moments can be obtained using the trapezoidal rule of numerical integration: σ t m( t + t) = m( t) exp iσ t i ch χ( t + t) + χ( t) exp iσ t ch 2 ch
48 IERS, AAM, AAM+OAM, OAM arcsec.4 x y MJD The IERS x, y pole coordinates and the x, y pole coordinates model data computed from fluid excitation functions
49 The wavelet transform coefficients of complex-valued signal defined: where WAVELET TRANSFORM COEFFICIENTS 1 Xˆ ( b, a) = a n a, b=,1,..., n 1 n / 2 ν = n / 2+ 1 x(t) ( ( x( ν ) ϕ ( a2πν / n)exp( i2πbν / n) - dilation and translation parameters x ( (ν ) ν = n/ 2+ 1,..., n/2 1, n/ 2 - Discrete Fourier Transforms (DFT) of x(t) time series ϕ ( (ω) - Continuous Fourier Transform (CFT) of the modified Morlet wavelet function given by the following time domain formula (Schmitz-Hübsch, and Schuh 1999): ϕ ( t) = 1 exp( i2π t) [ exp( t2 /2 σ 2 ) 2 exp( t2 / σ 2 )exp( 4π 2σ 2 /4) ] 2πσ
50 WAVELET TRANSFORM SPECTRUM AND POLARISATION SPECTRUM: m m = + o Sˆ xx ( t, a) Xˆ ( t + b, a) b= m o 2, m - positive integer, ˆ ( t, a) Sˆ ( t, a) POLARISATION: p xx ( t, a) = xx xx, Sˆ ( t, a) Sˆ xx + yy( t, a) Sˆ retrograde prograde pˆ xx( t, a) = 1 1 < pˆ xx ( t, a) < < pˆ xx ( t, a) < 1 pˆ xx ( t, a) = 1 circular elliptic the shape of ellipse degenerates to a line pˆ xx ( b, a) = circular
51 t =,1,..., n 1, time series is defined for < m < n 1 as: where ˆ φ xy r =1,3,5..., between x (t) and y(t) ˆ ϑr ˆ xy( t, a) = ˆ κxy( t, a) cosr( φxy( t, a)), t = mo + m/2, m =,1,..., n 1 m, ˆ κxy( t, a) = ( t, a) = arg WAVELET TRANSFORM SEMBLANCE The spectro-temporal semblance of the order 1 m b = m Sˆ xx mo + m o + 1 Sˆ o Sˆ ( t, a) Yˆ( t + b, a) yy xy ( t, a) ( t, a) Sˆ yy ( t, a) mo m Sˆ xy ( t, a) Xˆ ( t + b, a) Yˆ( t + b, a) / m Yˆ( b, a) = m m = + b= m o = + b= mo+ 1 a 1 n n / 2 ν = n / 2+ 1 [ Xˆ ( b, a) Yˆ( b, a)]/ Xˆ ( b, a) Yˆ( b, a) 2, - spectro-temporal coherence, - time-frequency wavelet spectrum of ( ( y( ν ) ϕ ( a2πν / n) exp( i2πbν / n) o, - spectro-temporal phase synchronization, y(t) - time-frequency wavelet cross-spectrum y ( (ν ) - DFT of y(t)
52 period (days) x,y IERS x, y AAM+OAM x, y AAM x, y OAM The Morlet wavelet spectra of x,y IERS 8C4 pole coordinates data and the model pole coordinates data computed from fluid excitation functions,

53 polarization: x - iy 4 2 IERS period (days) AAM+OAM 1 AAM.5 prograde 4 2 OAM retrograde years The Morlet wavelet polarization function of x-iy IERS pole coordinates data and x,y model pole coordinates data computed from fluid excitation functions.
54 IERS AAM OAM AAM+OAM period (days) The mean ( ) Morlet wavelet polarization functions of IERS x-iy pole coordinates data and x-iy pole coordinates model data computed from fluid excitation functions (AAM, OAM, AAM+OAM).



")


55 semblance (order 1) 4 2 chi/psi IERS, AAM 1.5 Period (days) chi/psi IERS, OAM chi/psi IERS, AAM+OAM years The Morlet wavelet semblance (order=1) between x-iy IERS pole coordinates data and the model pole coordinates data computed from fluid excitation functions.
56 period (days) semblance () semblance (1) period (days) geod, AAM+OAM+HAM geod, AAM+OAM geod, AAM geod, AAM+OAM+HAM geod, AAM+OAM geod, AAM semblance (3) period (days) geod, AAM+OAM+HAM geod, AAM+OAM geod, AAM The Morlet wavelet semblance (order=,1,3) between x-iy IERS pole coordinates data and pole coordinates model data computed from fluid excitation functions (AAM, AAM+OAM and AAM+OAM+HAM).
57 Prediction of x, y pole coordinates data by the LS+AR method x, y x, y LS model (Chandler circle + annual and semiannual ellipses + linear trend) x, y LS residuals LS extrapolation AR prediction x, y LS extrapolation Prediction of x, y LS residuals Prediction of x, y
58 Autoregressive method (AR) p n t z a z a z e e E t p p t p t t t p = = = + +,..., 1,2, ˆ... ˆ ˆ }, ˆ { ˆ σ } { ˆ k t t k z z E c + = Autoregressive order: min 1 1 ˆ ) ( 2 = + + = p n p n p AIC p σ =. ˆ ˆ. ˆ 1 ˆ. ˆ ˆ.... ˆ. ˆ ˆ ˆ. ˆ ˆ p p o p p p o p o a a c c c c c c c c c σ Autoregressive coefficients: are computed from autocovariance estimate : t t t p n p n n n iy x z where z a z a a z z + = = ˆ... ˆ ˆ ˆ p r a r,..., 1,2, ˆ =

 1 y 5 5 1")

 1 5 5 1983 1987")
59 Błędy prognoz x, y wyznaczonych metodami LS ils+ar (różna liczba harmonik w modelu LS) 1 LS x (434,365,182) 1 y (434,365,182,122,91,73) 1 arcsec.1 days in the future LS+AR 5 (434,365,182) (434,365,182,122,91,73) YEARS YEARS
60 Mean prediction errors of x (thin line), y (dashed line) pole coordinates data computed by the LS and LS+AR methods in arcsec LS (6yr) LS (4yr) LS (1yr) LS (4yr) + AR (85d) LS (1yr) + AR (85d) days in the future
61 arcsec x - 3 day prediction differences IERS AAM AAM+OAM y - 3 day prediction differences IERS AAM AAM+OAM arcsec x - 6 day prediction differences IERS AAM AAM+OAM y - 6 day prediction differences IERS AAM AAM+OAM Differences between IERS pole coordinates or model pole coordinates data computed from fluid (AAM, AAM+OAM) excitation functions and their predictions for 3 and 6 days in the future




62 days in the future years x IERS AAM+OAM AAM OAM Differences between x IERS pole coordinates or model pole coordinates data computed from fluid excitation functions and their predictions up to 1-year in the future




63 days in the future years y IERS AAM+OAM.1 AAM.5 OAM Differences between x IERS pole coordinates or pole coordinates model data computed from fluid excitation functions and their predictions up to 1-year in the future
64 arcsec.4.3 x IERS AAM+OAM.2 OAM AAM arcsec.4 days in the future.3 y IERS AAM+OAM.2 OAM AAM days in the future Mean prediction errors of x,y IERS pole coordinates and model pole coordinates data computed from fluid excitation functions (AAM, OAM, AAM+OAM)
65 DISCRETE WAVELET TRANSFORM BAND PASS FILTER The DWT j-th frequency component of the complex valued signal x(t) is given by: 2 j 1 1 ( j, k j, k k= 2 j 1 x j t) = S ϕ ( t) for t = 1,,..., n 1, j = j, j + 1,..., p 1, n= S j n = 1 t= x( t) ϕ ( t), k j, k - the DWT coefficients, ϕ ( t) = n2 j/ 2 ϕ ( t n/2 2 jkn) j, k j j p 2 p 1 - discrete Shannon wavelets. For fixed lowest frequency index and time index p 2, Signal reconstruction: x ( t) = x( t) j j= j j j j k = 2, 2 + 1,...,2 1 j sin[2 ϕ ( t) = exp[ ( /2)/ ] ( t n/2)/ n] n iπ t n n π, sin[ π ( t n/2)/ ] j n ϕ j ( n/2) = 2 / n j + 1 For higher frequency index j = j +, j + 2,..., p 1 and time index k = 2 j 1, 2 j 1 + 1,...,2 j sin[2 j ( ) 1 exp[ ( /2)/ ] ( t n/2)/ n](2cos[2 j ϕ ( t n/2)/ n] 1) j t = n iπ t n n π π, sin[ π( t n/2)/ n] ϕ n j j ( /2) = 2 / n
66 The frequency components of x (black), y (blue) pole coordinatesdata computed by the Shannon wavelet decomposition arcsec longer period Ch+An Sa shorter period



.")
 3 3.4 2 2.")

 3 3 2 2 1 1 x (Ch +")
 y (Ch")

67 The LS+AR prediction errors of IERS x, y pole coordinates data and of x, y pole coordinates model data computed by summing the chosen DWTBPF components x (IERS) y (IERS) x (Ch + An + longer period) y (Ch + An + longer period) days in the future arcsec y (Ch + An + shorter period) x (Ch + An + shorter period) x (Ch + An + Sa) y (Ch + An + Sa) x (Ch + An) y (Ch + An) YEARS YEARS
68 The mean LS+AR prediction errors of IERS x, y pole coordinates data (black), and of x, y pole coordinates model data computed by summing the chosen DWTBPF components arcsec.3 x arcsec.3 y IERS Ch + An + shorter period Ch + An + longer period Ch + An. t days in the future days in the future
69 The mean LS+AR prediction errors of IERS x, y pole coordinates data (black), and of x, y pole coordinates model data computed from AAM+OAM (red) excitation functions as well as by summing the DWTBPF components corresponding to Chandler, annual and shorter period oscillations (green) arcsec.3 x arcsec IERS AAM+OAM.3 y Ch + An + shorter period days in the future days in the future
70 The mean LS+AR prediction errors of IERS x, y pole coordinates data (black), and of x, y pole coordinates model data computed from AAM+OAM (red) and AAM+OAM+HAM (purple) excitation functions arcsec.3 x arcsec IERS AAM+OAM.3 y AAM+OAM+HAM days in the future days in the future

 12 8 4 8 6 4 2 The Morlet")

71 Morlet wavelet spectrum of x-iy IERS prediction differences days in the future retrograde period (days) prograde period (days) The Morlet wavelet spectra of prediction differences for prediction lengths 1-12 days computed for the IERS x, y pole coordinates

 1 2 3 4 5 6 7")


72 days in the future Morlet wavelet spectrum of x-iy prediction differences retrograde prograde GEOD 8 4 AAM+OAM AAM OAM period (days) period (days) The Morlet wavelet spectra of prediction differences for the IERS x, y pole coordinates and the x, y pole coordinates model data computed from fluid excitation functions (AAM, OAM, AAM+OAM)
73 Skewness(SKE) skośność jest miarą niesymetryczności rozkładu prawdopodobieństwa zmiennej rzeczywistej. Ujemna skośność oznacza, że lewy ogon rozkładu jest dłuższy niż prawy i liczba ujemnych wartości zmiennej losowej jest większa niż dodatnich wartości. Jeżeli rozkład prawdopodobieństwa jest symetryczny wówczasskośność jest równa zero. SKE i = E x pred i, j x obs SD i µ i, j 3 = 1 n 1 n n pred obs 3 ( x x i i j i j ) 1, µ =, µ 3 = 3/ 2 3 n SD pred obs 2 i ( x x i i j i j ) 1, µ =,, i = 1,2,..., M µ 3 SDi E - third moment about the mean - standard deviation error - the expectation operator.
74 Kurtosis(CUR) 3 3 ) ( 1 ) ( ,, 1 4,, 4,, = = = = = i n i j i obs pred j i n i j i obs pred j i i j i obs pred j i i SD x x n x x n SD x x E KUR µ µ µ µ µ 4 Kurtoza - (Gr.κυρτός, ang. bulging) jest miarą wybrzuszenia rozkładu prawdopodobieństwa rzeczywistej zmiennej losowej. Przewaga małych wartości zmiennych losowych powoduje wyostrzenie rozkładu, natomiast przewaga błędów grubych powoduje spłaszczenie rozkładu. Dla rozkładu normalnego kuroza=. - fourth moment about the mean i SD - standard deviation error - the expectation operator. E
75 6 SKE x IERS AAM+OAM AAM OAM days in the future 6 SKE y days in the future 3 KUR x KUR y days in the future days in the future Skewness and kurtosis of prediction differences for prediction lengths 1-12 days computed for the IERS x, y pole coordinates and x, y pole coordinates model data computed from fluid excitation functions (AAM, OAM, AAM+OAM)
76 Wnioski Dokładnośćprognoz danych EOP zależy od momentów czasu, w którym rozpoczynamy prognozowanie ze względu na występujące w nich zmiany nieregularne, zmienne w czasie amplitudy i fazy energetycznych oscylacji oraz szerokopasmowy charakter tych oscylacji. Kombinacja metod najmniejszych kwadratów i autoregresjils+ardostarcza obecnie prognoz współrzędnych x,y bieguna ziemskiego o najwyższej dokładności. Średni błąd prognozy kombinowanej współrzędnych x, y bieguna ziemskiego podczas kampanii EOPCPP (w latach 25-28) byłmniejszy niżbłąd wyznaczony jednątechnikąprognozowania, jednak wniosek ten nie potwierdza sięw przypadku nowej kampanii EOPCPPP (rozpoczętej w 21r). Krótkoterminowe błędy prognoz współrzędnych bieguna ziemskiego spowodowane sąszerokopasmowymi zmianami krótkookresowymi atmosferycznej i oceanicznej funkcji pobudzenia, a także błędami wynikającymi z braku dokładnego zamodelowania oscylacji rocznej i Chandlera, których amplitudy i fazy zmieniająsięw czasie. Wpływ atmosferycznej lub oceanicznej funkcji pobudzenia na błąd krótkoterminowych prognoz współrzędnych bieguna ziemskiego jest tego samego rzędu i stanowi około 6% całkowitego średniego błędu prognozy współrzędnych x, y bieguna ziemskiego, natomiast wpływ łącznej atmosferycznooceanicznej funkcji pobudzenia stanowi około 8-9% całkowitego błędu prognozy tych współrzędnych. Wpływ hydrologicznej funkcji pobudzenia na wzrost błędu prognozy współrzędnych x, y bieguna ziemskiego jest zaniedbywalny.
W. Kosek 1, W. Popiński 2, A. Rzeszótko 1 1. Centrum Badań Kosmicznych, PAN, Warszawa 2. Główny Urząd Statystyczny, Warszawa
 Wpływ szerokopasmowych oscylacji współrzędnych bieguna ziemskiego pobudzanych atmosferyczną, oceaniczną i hydrologiczną funkcją pobudzenia na błąd prognozy tych współrzędnych W. Kosek 1, W. Popiński 2,
Wpływ szerokopasmowych oscylacji współrzędnych bieguna ziemskiego pobudzanych atmosferyczną, oceaniczną i hydrologiczną funkcją pobudzenia na błąd prognozy tych współrzędnych W. Kosek 1, W. Popiński 2,
Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu
 Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu Agnieszka Wnęk 1, Maria Zbylut 1, Wiesław Kosek 1,2 1 Wydział
Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu Agnieszka Wnęk 1, Maria Zbylut 1, Wiesław Kosek 1,2 1 Wydział
Analiza czasowo częstotliwościowa nieregularnych zmian parametrów orientacji przestrzennej Ziemi
 Analiza czasowo częstotliwościowa nieregularnych zmian parametrów orientacji przestrzennej Ziemi mgr Alicja Rzeszótko rozprawa doktorska przygotowana w Centrum Badań Kosmicznych Polskiej Akademii Nauk
Analiza czasowo częstotliwościowa nieregularnych zmian parametrów orientacji przestrzennej Ziemi mgr Alicja Rzeszótko rozprawa doktorska przygotowana w Centrum Badań Kosmicznych Polskiej Akademii Nauk
GEODEZYJNE TECHNIKI SATELITARNE W REALIZACJI UKŁADU ODNIESIENIA
 GEODEZYJNE TECHNIKI SATELITARNE W REALIZACJI UKŁADU ODNIESIENIA Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Systemy i układy odniesienia System odniesienia (reference
GEODEZYJNE TECHNIKI SATELITARNE W REALIZACJI UKŁADU ODNIESIENIA Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Systemy i układy odniesienia System odniesienia (reference
Zmiany fazy/okresu oscylacji Chandlera i rocznej we współrzędnych bieguna ziemskiego.
 Strona 1 z 27 Zmiany fazy/okresu oscylacji Chandlera i rocznej we współrzędnych bieguna ziemskiego. Alicja Rzeszótko Wiesław Kosek Waldemar Popiński Seminarium Sekcji Dynamiki Ziemi Komitetu Geodezji PAN
Strona 1 z 27 Zmiany fazy/okresu oscylacji Chandlera i rocznej we współrzędnych bieguna ziemskiego. Alicja Rzeszótko Wiesław Kosek Waldemar Popiński Seminarium Sekcji Dynamiki Ziemi Komitetu Geodezji PAN
Geodezja i geodynamika - trendy nauki światowej (1)
") - trendy nauki światowej (1) Glob ziemski z otaczającą go atmosferą jest skomplikowanym systemem dynamicznym stały monitoring tego systemu interdyscyplinarność zasięg globalny integracja i koordynacja
- trendy nauki światowej (1) Glob ziemski z otaczającą go atmosferą jest skomplikowanym systemem dynamicznym stały monitoring tego systemu interdyscyplinarność zasięg globalny integracja i koordynacja
Zmiany fazy/okresu oscylacji Chandlera i rocznej we współrzędnych bieguna ziemskiego.
 Strona 1 z 38 Zmiany fazy/okresu oscylacji Chandlera i rocznej we współrzędnych bieguna ziemskiego. Alicja Rzeszótko alicja@cbk.waw.pl 2 czerwca 2006 1 Omówienie danych 3 Strona główna Strona 2 z 38 2
Strona 1 z 38 Zmiany fazy/okresu oscylacji Chandlera i rocznej we współrzędnych bieguna ziemskiego. Alicja Rzeszótko alicja@cbk.waw.pl 2 czerwca 2006 1 Omówienie danych 3 Strona główna Strona 2 z 38 2
Wyznaczenie wspólnych oscylacji we współrzędnych środka mas Ziemi obserwowanych technikami SLR, GNSS i DORIS
 Wyznaczenie wspólnych oscylaci we współrzędnych środa mas Ziemi obserwowanych techniami SLR GNSS i DORIS W. Kose 12 W.Popińsi 3 A.Wnę 1 M. Zbylut 1 1 Wydział Inżynierii Środowisa i Geodezi Uniwersytetu
Wyznaczenie wspólnych oscylaci we współrzędnych środa mas Ziemi obserwowanych techniami SLR GNSS i DORIS W. Kose 12 W.Popińsi 3 A.Wnę 1 M. Zbylut 1 1 Wydział Inżynierii Środowisa i Geodezi Uniwersytetu
Co mierzymy w geodezji?
 Wyznaczanie geodezyjnych parametrów rotacji, geometrii i pola grawitacyjnego Ziemi z wykorzystaniem laserowych pomiarów odległości do sztucznych satelitów Krzysztof Sośnica Co mierzymy w geodezji? III
Wyznaczanie geodezyjnych parametrów rotacji, geometrii i pola grawitacyjnego Ziemi z wykorzystaniem laserowych pomiarów odległości do sztucznych satelitów Krzysztof Sośnica Co mierzymy w geodezji? III
OPIS MODUŁ KSZTAŁCENIA (SYLABUS)
") OPIS MODUŁ KSZTAŁCENIA (SYLABUS) I. Informacje ogólne: 1 Nazwa modułu kształcenia Geodezja satelitarna 2 Kod modułu kształcenia 04-ASTR1-GEOD45-3Z 3 Rodzaj modułu kształcenia do wyboru 4 Kierunek studiów
OPIS MODUŁ KSZTAŁCENIA (SYLABUS) I. Informacje ogólne: 1 Nazwa modułu kształcenia Geodezja satelitarna 2 Kod modułu kształcenia 04-ASTR1-GEOD45-3Z 3 Rodzaj modułu kształcenia do wyboru 4 Kierunek studiów
PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS
 PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS Katarzyna Kraszewska, Marcin Jagoda, Miłosława Rutkowska STRESZCZENIE
PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS Katarzyna Kraszewska, Marcin Jagoda, Miłosława Rutkowska STRESZCZENIE
Sygnały okresowe w zmianach współrzędnych GPS i SLR
 Sygnały okresowe w zmianach współrzędnych GPS i SLR Janusz Bogusz 1), Mariusz Figurski 1), Anna Kłos 1), Stanisław Schillak 2),3), Karolina Szafranek 1) 1) Wojskowa Akademia Techniczna 2) Centrum Badań
Sygnały okresowe w zmianach współrzędnych GPS i SLR Janusz Bogusz 1), Mariusz Figurski 1), Anna Kłos 1), Stanisław Schillak 2),3), Karolina Szafranek 1) 1) Wojskowa Akademia Techniczna 2) Centrum Badań
Zmienna oscylacja roczna atmosferyczno oceanicznej funkcji pobudzenia źródłem pobudzania oscylacji Chandlera we współrzędnych bieguna ziemskiego
 Zmienna oscylacja roczna atmosferyczno oceanicznej funkcji pobudzenia źródłem pobudzania oscylacji Chandlera we współrzędnych bieguna ziemskiego Kosek Wiesław Centrum Badań Kosmicznych, PAN SEMINARIUM
Zmienna oscylacja roczna atmosferyczno oceanicznej funkcji pobudzenia źródłem pobudzania oscylacji Chandlera we współrzędnych bieguna ziemskiego Kosek Wiesław Centrum Badań Kosmicznych, PAN SEMINARIUM
Alternatywne do GNSS metody obserwacji satelitarnych
 Alternatywne do GNSS metody obserwacji satelitarnych [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie Przegląd operacyjnych technik obserwacji satelitarnych:
Alternatywne do GNSS metody obserwacji satelitarnych [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie Przegląd operacyjnych technik obserwacji satelitarnych:
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2011 LXVI WARSZAWA 2010 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji i
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2011 LXVI WARSZAWA 2010 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji i
ASG EUPOS w państwowym systemie odniesień przestrzennych
 ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2013 LXVIII WARSZAWA 2012 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2013 LXVIII WARSZAWA 2012 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
Moduł modelowania i predykcji stanu jonosfery
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduł modelowania i predykcji stanu jonosfery A. Krankowski, A. Drożyner, R. Sieradzki
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduł modelowania i predykcji stanu jonosfery A. Krankowski, A. Drożyner, R. Sieradzki
Zastosowanie techniki zespolonej demodulacji do badania dobowych i subdobowych sygnałów w ruchu obrotowym Ziemi
 Zastosowanie techniki zespolonej demodulacji do badania dobowych i subdobowych sygnałów w ruchu obrotowym Ziemi Aleksander Brzeziński Wydział Geodezji i Kartografii Politechniki Warszawskiej Centrum Badań
Zastosowanie techniki zespolonej demodulacji do badania dobowych i subdobowych sygnałów w ruchu obrotowym Ziemi Aleksander Brzeziński Wydział Geodezji i Kartografii Politechniki Warszawskiej Centrum Badań
JAN KRYŃSKI Instytut Geodezji i Kartografii Warszawa JERZY B. ROGOWSKI Instytut Geodezji Wyższej i Astronomii Geodezyjnej Politechniki Warszawskiej
 INSTYTUT GEODEZJI I KARTOGRAFII Seria Monograficzna nr 10 JAN KRYŃSKI Instytut Geodezji i Kartografii Warszawa JERZY B. ROGOWSKI Instytut Geodezji Wyższej i Astronomii Geodezyjnej Politechniki Warszawskiej
INSTYTUT GEODEZJI I KARTOGRAFII Seria Monograficzna nr 10 JAN KRYŃSKI Instytut Geodezji i Kartografii Warszawa JERZY B. ROGOWSKI Instytut Geodezji Wyższej i Astronomii Geodezyjnej Politechniki Warszawskiej
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2008 LXIII WARSZAWA 2007 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2008 LXIII WARSZAWA 2007 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2012 LXVII WARSZAWA 2011 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2012 LXVII WARSZAWA 2011 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
RUCH ROTACYJNY ZIEMI. Geodezja Satelitarna
 RUCH ROTACYJNY ZIEMI Geodezja Satelitarna ROTACJA ZIEMI Niejednostajność ruchu (spowalnianie obrotu wydłużanie długości dnia) Zmienność położenia osi rotacji - ruch względem inercjalnego układu współrzędnych
RUCH ROTACYJNY ZIEMI Geodezja Satelitarna ROTACJA ZIEMI Niejednostajność ruchu (spowalnianie obrotu wydłużanie długości dnia) Zmienność położenia osi rotacji - ruch względem inercjalnego układu współrzędnych
Skale czasu. 1.1 Dokładność czasu T IE - Time Interval Error
 Skale czasu 1 Dokładność i stabilność zegarów Zegar wytwarza sygnał okresowy (częstotliwościowy), który opisać można prostą funkcją harmoniczną: s(t) = A sin(2πν nom + φ 0 ) (1) ν nom = 9192631770Hz jest
Skale czasu 1 Dokładność i stabilność zegarów Zegar wytwarza sygnał okresowy (częstotliwościowy), który opisać można prostą funkcją harmoniczną: s(t) = A sin(2πν nom + φ 0 ) (1) ν nom = 9192631770Hz jest
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK. IGiK ASTRONOMICZNY NA ROK
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK IGiK ASTRONOMICZNY NA ROK 2004 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2004 LIX WARSZAWA 2003 Rada Wydawnicza przy Instytucie Geodezji i Kartografii
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK IGiK ASTRONOMICZNY NA ROK 2004 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2004 LIX WARSZAWA 2003 Rada Wydawnicza przy Instytucie Geodezji i Kartografii
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NAROK2014 LXIX WARSZAWA 2013 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji i Kartografii
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NAROK2014 LXIX WARSZAWA 2013 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji i Kartografii
SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS
 II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
Podstawowe definicje. System odniesienia (reference system)
") Podstawowe definicje System odniesienia (reference system) Stanowi zbiór ustaleń i zaleceń wraz z opisem modeli niezbędnych do zdefiniowania początku, skali (metryki) i orientacji osi oraz zmienności tych
Podstawowe definicje System odniesienia (reference system) Stanowi zbiór ustaleń i zaleceń wraz z opisem modeli niezbędnych do zdefiniowania początku, skali (metryki) i orientacji osi oraz zmienności tych
Geodynamika. Marcin Rajner ostatnia aktualizacja 23 lutego 2015
 Geodynamika Marcin Rajner www.grat.gik.pw.edu.pl/dydaktyka/ ostatnia aktualizacja 23 lutego 2015 Sprawy organizacyjne Konsultacje Poniedziałki 12-13 soboty 12-13 zawsze Sprawy organizacyjne Treści wykładów
Geodynamika Marcin Rajner www.grat.gik.pw.edu.pl/dydaktyka/ ostatnia aktualizacja 23 lutego 2015 Sprawy organizacyjne Konsultacje Poniedziałki 12-13 soboty 12-13 zawsze Sprawy organizacyjne Treści wykładów
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS
 Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
Fizyka i Chemia Ziemi
 Fizyka i Chemia Ziemi Temat 5: Zjawiska w układzie Ziemia - Księżyc T.J. Jopek jopek@amu.edu.pl IOA UAM 2012-01-26 T.J.Jopek, Fizyka i chemia Ziemi 1 Ruch orbitalny Księżyca Obserwowane tarcze Księżyca
Fizyka i Chemia Ziemi Temat 5: Zjawiska w układzie Ziemia - Księżyc T.J. Jopek jopek@amu.edu.pl IOA UAM 2012-01-26 T.J.Jopek, Fizyka i chemia Ziemi 1 Ruch orbitalny Księżyca Obserwowane tarcze Księżyca
Skale czasu. dr inż. Stefan Jankowski
 Skale czasu dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Definition of Time Co mierzą zegary (przyp. fizykom Albert Einstein, Donald Ivey, and others) Coś co zapobiega aby wszystko nie działo się
Skale czasu dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Definition of Time Co mierzą zegary (przyp. fizykom Albert Einstein, Donald Ivey, and others) Coś co zapobiega aby wszystko nie działo się
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2009 LXIV WARSZAWA 2008 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji i
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2009 LXIV WARSZAWA 2008 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji i
Zmiany w czasie pola siły ciężkości mechanizmy, monitorowanie, zastosowania, perspektywy Jan Kryński
 Zmiany w czasie pola siły ciężkości mechanizmy, monitorowanie, zastosowania, perspektywy Jan Kryński Instytut Geodezji i Kartografii Treść prezentacji 1. Mechanizmy zmian w czasie pola siły ciężkości 2.
Zmiany w czasie pola siły ciężkości mechanizmy, monitorowanie, zastosowania, perspektywy Jan Kryński Instytut Geodezji i Kartografii Treść prezentacji 1. Mechanizmy zmian w czasie pola siły ciężkości 2.
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2017 LXXII WARSZAWA 2016 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2017 LXXII WARSZAWA 2016 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2018 LXXIII WARSZAWA 2017 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2018 LXXIII WARSZAWA 2017 Redaktor naukowy Rocznika Astronomicznego Jan Kryński Sekretarz: Marcin Sękowski Adres Redakcji: Instytut Geodezji
Techniki pomiarów satelitarnych i geodezyjne misje satelitarne
 Techniki pomiarów satelitarnych i geodezyjne misje satelitarne Techniki pomiarów satelitarnych Ziemia Kosmos (Earth to Space) GNSS GPS, GLONASS, GALILEO (IGS) Doppler DORIS (IDS) Pomiary laserowe SLR/LLR
Techniki pomiarów satelitarnych i geodezyjne misje satelitarne Techniki pomiarów satelitarnych Ziemia Kosmos (Earth to Space) GNSS GPS, GLONASS, GALILEO (IGS) Doppler DORIS (IDS) Pomiary laserowe SLR/LLR
ROCZNIK ASTRONOMICZNY
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY 2015 NA ROK IGiK INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NAROK2015 LXX WARSZAWA 2014 Redaktor naukowy Rocznika Astronomicznego Jan Kryński
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY 2015 NA ROK IGiK INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NAROK2015 LXX WARSZAWA 2014 Redaktor naukowy Rocznika Astronomicznego Jan Kryński
RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA
 Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK. IGiK ASTRONOMICZNY NA ROK
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK IGiK ASTRONOMICZNY NA ROK 2002 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2002 LVII WARSZAWA 2001 Rada Wydawnicza przy Instytucie Geodezji i Kartografii
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK IGiK ASTRONOMICZNY NA ROK 2002 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2002 LVII WARSZAWA 2001 Rada Wydawnicza przy Instytucie Geodezji i Kartografii
The impact of the global gravity field models on the orbit determination of LAGEOS satellites
 models on the Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji, Poland 2-4.06.2011 Krzysztof Sośnica, Daniela Thaller, Adrian Jäggi, Rolf Dach and Gerhard Beutler Astronomical
models on the Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji, Poland 2-4.06.2011 Krzysztof Sośnica, Daniela Thaller, Adrian Jäggi, Rolf Dach and Gerhard Beutler Astronomical
Wykład 2 Układ współrzędnych, system i układ odniesienia
 Wykład 2 Układ współrzędnych, system i układ odniesienia Prof. dr hab. Adam Łyszkowicz Katedra Geodezji Szczegółowej UWM w Olsztynie adaml@uwm.edu.pl Heweliusza 12, pokój 04 Spis treści Układ współrzędnych
Wykład 2 Układ współrzędnych, system i układ odniesienia Prof. dr hab. Adam Łyszkowicz Katedra Geodezji Szczegółowej UWM w Olsztynie adaml@uwm.edu.pl Heweliusza 12, pokój 04 Spis treści Układ współrzędnych
RELACJE POMIĘDZY SYSTEMAMI NIEBIESKIMI I SYSTEMEM ZIEMSKIM
 INSTYTUT GODZJI I KARTOGRAFII Seria Monograficzna nr 10 JAN KRYŃSKI Instytut Geodezji i Kartografii Warszawa RLACJ POMIĘDZY SYSTMAMI NIBISKIMI I SYSTMM ZIMSKIM ZARYS TRŚCI: Przyjęte na mocy Rezolucji B1.3
INSTYTUT GODZJI I KARTOGRAFII Seria Monograficzna nr 10 JAN KRYŃSKI Instytut Geodezji i Kartografii Warszawa RLACJ POMIĘDZY SYSTMAMI NIBISKIMI I SYSTMM ZIMSKIM ZARYS TRŚCI: Przyjęte na mocy Rezolucji B1.3
WPŁYW WYBORU KATALOGU FUNDAMENTALNEGO NA WARTOŚCI OBLICZANYCH POZYCJI POZORNYCH GWIAZD
 INSTYTUT GEODEZJI I KARTOGRAFII SERIA MONOGRAFICZNA NR 11 MARCIN SĘKOWSKI WPŁYW WYBORU KATALOGU FUNDAMENTALNEGO NA WARTOŚCI OBLICZANYCH POZYCJI POZORNYCH GWIAZD Warszawa 2006 Rada Wydawnicza przy Instytucie
INSTYTUT GEODEZJI I KARTOGRAFII SERIA MONOGRAFICZNA NR 11 MARCIN SĘKOWSKI WPŁYW WYBORU KATALOGU FUNDAMENTALNEGO NA WARTOŚCI OBLICZANYCH POZYCJI POZORNYCH GWIAZD Warszawa 2006 Rada Wydawnicza przy Instytucie
Dokładność wyznaczenia prędkości europejskich stacji permanentnych EPN
 Dokładność wyznaczenia prędkości europejskich stacji permanentnych EPN Anna Kłos, Janusz Bogusz, Mariusz Figurski, Maciej Gruszczyński Wojskowa Akademia Techniczna 1/24 We współczesnej geodezji wiarygodne
Dokładność wyznaczenia prędkości europejskich stacji permanentnych EPN Anna Kłos, Janusz Bogusz, Mariusz Figurski, Maciej Gruszczyński Wojskowa Akademia Techniczna 1/24 We współczesnej geodezji wiarygodne
Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska
 UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
Walyeldeen Godah Małgorzata Szelachowska Jan Kryński. Instytut Geodezji i Kartografii (IGiK), Warszawa Centrum Geodezji i Geodynamiki
, Warszawa Centrum Geodezji i Geodynamiki") Porównanie globalnych modeli geopotencjału opracowanych na podstawie danych z misji GRACE oraz GOCE/GRACE z przyspieszeniem siły ciężkości pomierzonym w Obserwatorium Geodezyjno-Geofizycznym Borowa Góra
Porównanie globalnych modeli geopotencjału opracowanych na podstawie danych z misji GRACE oraz GOCE/GRACE z przyspieszeniem siły ciężkości pomierzonym w Obserwatorium Geodezyjno-Geofizycznym Borowa Góra
... prognozowanie nie jest celem samym w sobie a jedynie narzędziem do celu...
 4 Prognozowanie historyczne Prognozowanie - przewidywanie przyszłych zdarzeń w oparciu dane - podstawowy element w podejmowaniu decyzji... prognozowanie nie jest celem samym w sobie a jedynie narzędziem
4 Prognozowanie historyczne Prognozowanie - przewidywanie przyszłych zdarzeń w oparciu dane - podstawowy element w podejmowaniu decyzji... prognozowanie nie jest celem samym w sobie a jedynie narzędziem
Zjawisko El Niño obserwacje, modelowanie i konsekwencje geodynamiczne Kosek Wiesław Centrum Badań Kosmicznych, PAN
 Zjawisko El Niño obserwacje, modelowanie i konsekwencje geodynamiczne Kosek Wiesław Centrum Badań Kosmicznych, PAN II Seminarium z cyklu NAUKA W SŁUŻBIE ZIEMI na temat Geodezja a współczesne problemy globalnej
Zjawisko El Niño obserwacje, modelowanie i konsekwencje geodynamiczne Kosek Wiesław Centrum Badań Kosmicznych, PAN II Seminarium z cyklu NAUKA W SŁUŻBIE ZIEMI na temat Geodezja a współczesne problemy globalnej
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Obszar badawczy i zadania geodezji satelitarnej
 Obszar badawczy i zadania geodezji satelitarnej [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie cirm.am.szczecin.pl Literatura: 1. Januszewski J., Systemy
Obszar badawczy i zadania geodezji satelitarnej [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie cirm.am.szczecin.pl Literatura: 1. Januszewski J., Systemy
ENSO i jego wpływ na zmiany rotacji Ziemi oraz topografii oceanu Kosek Wiesław Centrum Badań Kosmicznych, PAN
 ENSO i jego wpływ na zmiany rotacji Ziemi oraz topografii oceanu Kosek Wiesław Centrum Badań Kosmicznych, PAN Środowiskowe Seminarium Fizyki Atmosfery, Wydział Fizyki UW 0 marzec 009 Definicja: El Niño
ENSO i jego wpływ na zmiany rotacji Ziemi oraz topografii oceanu Kosek Wiesław Centrum Badań Kosmicznych, PAN Środowiskowe Seminarium Fizyki Atmosfery, Wydział Fizyki UW 0 marzec 009 Definicja: El Niño
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK. IGiK ASTRONOMICZNY NA ROK
 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK IGiK ASTRONOMICZNY NA ROK 2003 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2003 LVIII WARSZAWA 2002 Rada Wydawnicza przy Instytucie Geodezji i Kartografii
INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK IGiK ASTRONOMICZNY NA ROK 2003 INSTYTUT GEODEZJI I KARTOGRAFII ROCZNIK ASTRONOMICZNY NA ROK 2003 LVIII WARSZAWA 2002 Rada Wydawnicza przy Instytucie Geodezji i Kartografii
ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM
 ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM Figurski M., Szafranek K., Araszkiewicz A., Szołucha M. Realizacja grantu
ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM Figurski M., Szafranek K., Araszkiewicz A., Szołucha M. Realizacja grantu
Fizyka i Chemia Ziemi
 Fizyka i Chemia Ziemi Układ Ziemia - Księżyc T.J. Jopek jopek@amu.edu.pl IOA UAM 2013-01-24 T.J.Jopek, Fizyka i chemia Ziemi 1 Ruch orbitalny Księżyca Obserwowane tarcze Księżyca 2013-01-24 T.J.Jopek,
Fizyka i Chemia Ziemi Układ Ziemia - Księżyc T.J. Jopek jopek@amu.edu.pl IOA UAM 2013-01-24 T.J.Jopek, Fizyka i chemia Ziemi 1 Ruch orbitalny Księżyca Obserwowane tarcze Księżyca 2013-01-24 T.J.Jopek,
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89
 Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89 Tomasz Liwosz 1, Marcin Ryczywolski 1,2 1 Politechnika Warszawska 2 Główny Urząd Geodezji i Kartografii Seminarium Współczesne problemy podstawowych
Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89 Tomasz Liwosz 1, Marcin Ryczywolski 1,2 1 Politechnika Warszawska 2 Główny Urząd Geodezji i Kartografii Seminarium Współczesne problemy podstawowych
Globalny Geodezyjny System Obserwacyjny jako element Globalnego Systemu Systemów Obserwacji Ziemi
 Globalny Geodezyjny System Obserwacyjny jako element Globalnego Systemu Systemów Obserwacji Ziemi Jarosław BOSY Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Uniwersytet Warmińsko-Mazurski
Globalny Geodezyjny System Obserwacyjny jako element Globalnego Systemu Systemów Obserwacji Ziemi Jarosław BOSY Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Uniwersytet Warmińsko-Mazurski
Rezolucje XXI Zgromadzenia Generalnego Międzynarodowej Unii Astronomicznej (IAU) Buenos Aires, 23 lipca 1 sierpnia 1991 r.
 Buenos Aires, 23 lipca 1 sierpnia 1991 r.") Rezolucje XXI Zgromadzenia Generalnego IAU 1991 243 Rezolucje XXI Zgromadzenia Generalnego Międzynarodowej Unii Astronomicznej (IAU) Buenos Aires, 23 lipca 1 sierpnia 1991 r. RZOLUCJA A4 Rekomendacje Grupy
Rezolucje XXI Zgromadzenia Generalnego IAU 1991 243 Rezolucje XXI Zgromadzenia Generalnego Międzynarodowej Unii Astronomicznej (IAU) Buenos Aires, 23 lipca 1 sierpnia 1991 r. RZOLUCJA A4 Rekomendacje Grupy
Systemy odniesienia pozycji w odbiornikach nawigacyjnych. dr inż. Paweł Zalewski
 Systemy odniesienia pozycji w odbiornikach nawigacyjnych dr inż. Paweł Zalewski Wprowadzenie Terestryczne systemy odniesienia (terrestrial reference systems) lub systemy współrzędnych (coordinate systems)
Systemy odniesienia pozycji w odbiornikach nawigacyjnych dr inż. Paweł Zalewski Wprowadzenie Terestryczne systemy odniesienia (terrestrial reference systems) lub systemy współrzędnych (coordinate systems)
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
Rozkłady wielu zmiennych
 Rozkłady wielu zmiennych Uogólnienie pojęć na rozkład wielu zmiennych Dystrybuanta, gęstość prawdopodobieństwa, rozkład brzegowy, wartości średnie i odchylenia standardowe, momenty Notacja macierzowa Macierz
Rozkłady wielu zmiennych Uogólnienie pojęć na rozkład wielu zmiennych Dystrybuanta, gęstość prawdopodobieństwa, rozkład brzegowy, wartości średnie i odchylenia standardowe, momenty Notacja macierzowa Macierz
WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET
 MIL GEN 2.7-1 MIL GEN 2.7 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały opracowane
MIL GEN 2.7-1 MIL GEN 2.7 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały opracowane
Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów współrzędnych
 Załącznik nr 1 Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów Tabela 1. Parametry techniczne geodezyjnego układu odniesienia PL-ETRF2000 Parametry techniczne geodezyjnego
Załącznik nr 1 Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów Tabela 1. Parametry techniczne geodezyjnego układu odniesienia PL-ETRF2000 Parametry techniczne geodezyjnego
Wędrówki między układami współrzędnych
 Wykład udostępniam na licencji Creative Commons: Wędrówki między układami współrzędnych Piotr A. Dybczyński Układ równikowy godzinny i układ horyzontalny zenit północny biegun świata Z punkt wschodu szerokość
Wykład udostępniam na licencji Creative Commons: Wędrówki między układami współrzędnych Piotr A. Dybczyński Układ równikowy godzinny i układ horyzontalny zenit północny biegun świata Z punkt wschodu szerokość
WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET
 AIP VFR POLAND VFR GEN 3.2-1 VFR GEN 3.2 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały
AIP VFR POLAND VFR GEN 3.2-1 VFR GEN 3.2 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały
WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET
 AIP VFR POLAND VFR GEN 3.2-1 VFR GEN 3.2 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały
AIP VFR POLAND VFR GEN 3.2-1 VFR GEN 3.2 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały
Zastosowanie metody dekompozycji falkowej do analiz korelacyjnych zmian pola ciężkości Ziemi
 Zastosowanie metody dekompozycji falkowej do analiz korelacyjnych zmian pola ciężkości Ziemi JANUSZ BOGUSZ 1), ANNA KŁOS 1), WIESŁAW KOSEK 2),3) 1) Wojskowa Akademia Techniczna, Centrum Geomatyki Stosowanej,00-908
Zastosowanie metody dekompozycji falkowej do analiz korelacyjnych zmian pola ciężkości Ziemi JANUSZ BOGUSZ 1), ANNA KŁOS 1), WIESŁAW KOSEK 2),3) 1) Wojskowa Akademia Techniczna, Centrum Geomatyki Stosowanej,00-908
ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU
 ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU obraz dr inż. Jacek Naruniec Analiza Składowych Niezależnych (ICA) Independent Component Analysis Dąży do wyznaczenia zmiennych niezależnych z obserwacji Problem opiera
ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU obraz dr inż. Jacek Naruniec Analiza Składowych Niezależnych (ICA) Independent Component Analysis Dąży do wyznaczenia zmiennych niezależnych z obserwacji Problem opiera
Wyznaczanie i ocena jakości orbit sztucznych satelitów Ziemi z wykorzystaniem obserwacji GNSS i SLR. Krzysztof Sośnica
 Wyznaczanie i ocena jakości orbit sztucznych satelitów Ziemi z wykorzystaniem obserwacji GNSS i SLR Krzysztof Sośnica Techniki obserwacyjne do wyznaczania orbit Techniki obserwacyjne Orbity precyzyjne
Wyznaczanie i ocena jakości orbit sztucznych satelitów Ziemi z wykorzystaniem obserwacji GNSS i SLR Krzysztof Sośnica Techniki obserwacyjne do wyznaczania orbit Techniki obserwacyjne Orbity precyzyjne
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych
 Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET
 AIP POLSKA GEN 2.7-1 30 MAR 2017 GEN 2.7 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały
AIP POLSKA GEN 2.7-1 30 MAR 2017 GEN 2.7 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały
Szereg i transformata Fouriera
 Analiza danych środowiskowych III rok OŚ Wykład 3 Andrzej Leśniak KGIS, GGiOŚ AGH Szereg i transformata Fouriera Cel wykładu: Wykrywanie i analiza okresowości w szeregach czasowych Przepływ wody w rzece
Analiza danych środowiskowych III rok OŚ Wykład 3 Andrzej Leśniak KGIS, GGiOŚ AGH Szereg i transformata Fouriera Cel wykładu: Wykrywanie i analiza okresowości w szeregach czasowych Przepływ wody w rzece
WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET
 AIP POLSKA GEN 2.7-1 31 MAR 2016 GEN 2.7 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały
AIP POLSKA GEN 2.7-1 31 MAR 2016 GEN 2.7 WSCHÓD I ZACHÓD SŁOŃCA SUNRISE / SUNSET OBLICZANIE CZASÓW WSCHODU I ZACHODU SŁOŃCA 1. Tabele wschodu i zachodu słońca dla lotniska EPWA oraz tabela poprawek zostały
POLITECHNIKA ŚLĄSKA INSTYTUT AUTOMATYKI ZAKŁAD SYSTEMÓW POMIAROWYCH
 POLITECHNIKA ŚLĄSKA INSTYTUT AUTOMATYKI ZAKŁAD SYSTEMÓW POMIAROWYCH Gliwice, wrzesień 2005 Pomiar napięcia przemiennego Cel ćwiczenia Celem ćwiczenia jest zbadanie dokładności woltomierza cyfrowego dla
POLITECHNIKA ŚLĄSKA INSTYTUT AUTOMATYKI ZAKŁAD SYSTEMÓW POMIAROWYCH Gliwice, wrzesień 2005 Pomiar napięcia przemiennego Cel ćwiczenia Celem ćwiczenia jest zbadanie dokładności woltomierza cyfrowego dla
OPIS MODUŁ KSZTAŁCENIA (SYLABUS)
") OPIS MODUŁ KSZTAŁCENIA (SYLABUS) I. Informacje ogólne: 1 Nazwa modułu Astronomia sferyczna 2 Kod modułu 04-ASTR1-ASFER60-1L 3 Rodzaj modułu obowiązkowy 4 Kierunek studiów Astronomia 5 Poziom studiów I
OPIS MODUŁ KSZTAŁCENIA (SYLABUS) I. Informacje ogólne: 1 Nazwa modułu Astronomia sferyczna 2 Kod modułu 04-ASTR1-ASFER60-1L 3 Rodzaj modułu obowiązkowy 4 Kierunek studiów Astronomia 5 Poziom studiów I
STATYSTYKA OD PODSTAW Z SYSTEMEM SAS. wersja 9.2 i 9.3. Szkoła Główna Handlowa w Warszawie
 STATYSTYKA OD PODSTAW Z SYSTEMEM SAS wersja 9.2 i 9.3 Szkoła Główna Handlowa w Warszawie Spis treści Wprowadzenie... 6 1. Podstawowe informacje o systemie SAS... 9 1.1. Informacje ogólne... 9 1.2. Analityka...
STATYSTYKA OD PODSTAW Z SYSTEMEM SAS wersja 9.2 i 9.3 Szkoła Główna Handlowa w Warszawie Spis treści Wprowadzenie... 6 1. Podstawowe informacje o systemie SAS... 9 1.1. Informacje ogólne... 9 1.2. Analityka...
Projektowanie systemów pomiarowych. 02 Dokładność pomiarów
 Projektowanie systemów pomiarowych 02 Dokładność pomiarów 1 www.technidyneblog.com 2 Jak dokładnie wykonaliśmy pomiar? Czy duża / wysoka dokładność jest zawsze konieczna? www.sparkfun.com 3 Błąd pomiaru.
Projektowanie systemów pomiarowych 02 Dokładność pomiarów 1 www.technidyneblog.com 2 Jak dokładnie wykonaliśmy pomiar? Czy duża / wysoka dokładność jest zawsze konieczna? www.sparkfun.com 3 Błąd pomiaru.
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Globalny system i układ wysokościowy stan obecny i perspektywy
 Uniwersytet Warmińsko-Mazurski w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Szczegółowej Globalny system i układ wysokościowy stan obecny i perspektywy Adam Łyszkowicz, Joanna
Uniwersytet Warmińsko-Mazurski w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Szczegółowej Globalny system i układ wysokościowy stan obecny i perspektywy Adam Łyszkowicz, Joanna
Wpływ niezamodelowanych efektów w częstotliwościach subdobowych na stabilność rozwiązań GPS. Janusz Bogusz, Mariusz Figurski
 S e m i n a r i u m W s p ó ł c z e s n e p r o b l e m y p o d s t a w o w y c h s i e c i g e o d e z y j n y c h, a p r o b l e m y d e f i n i o w a n i a k r a j o w y c h u k ł a d ó w o d n i e
S e m i n a r i u m W s p ó ł c z e s n e p r o b l e m y p o d s t a w o w y c h s i e c i g e o d e z y j n y c h, a p r o b l e m y d e f i n i o w a n i a k r a j o w y c h u k ł a d ó w o d n i e
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Układy współrzędnych obowiazujące w Polsce realizowane technikami satelitarnymi
 Systemy GNSS w pomiarach geodezyjnych 1/56 Układy współrzędnych obowiazujące w Polsce realizowane technikami satelitarnymi Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu
Systemy GNSS w pomiarach geodezyjnych 1/56 Układy współrzędnych obowiazujące w Polsce realizowane technikami satelitarnymi Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu
Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju
 Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Centrum Badań Kosmicznych PAN, Warszawa Stanisław
Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Centrum Badań Kosmicznych PAN, Warszawa Stanisław
Walidacja globalnych modeli geopotencjału pochodzących z misji satelitarnych w oparciu o naziemne dane grawimetryczne
 Walidacja globalnych modeli geopotencjału pochodzących z misji satelitarnych w oparciu o naziemne dane grawimetryczne Wydział Geodezji i Kartografii Politechniki Warszawskiej Katedra Geodezji i Astronomii
Walidacja globalnych modeli geopotencjału pochodzących z misji satelitarnych w oparciu o naziemne dane grawimetryczne Wydział Geodezji i Kartografii Politechniki Warszawskiej Katedra Geodezji i Astronomii
Ziemia jako zegar Piotr A. Dybczyński
 Wykład udostępniam na licencji Creative Commons: Ziemia jako zegar Piotr A. Dybczyński Czas gwiazdowy N N N N N N N N N N N s = 0h Miara czasowa kątów 360 = 24h 15 = 1h = 60m m 1 = 4 m 60' = 4 15' = 1m
Wykład udostępniam na licencji Creative Commons: Ziemia jako zegar Piotr A. Dybczyński Czas gwiazdowy N N N N N N N N N N N s = 0h Miara czasowa kątów 360 = 24h 15 = 1h = 60m m 1 = 4 m 60' = 4 15' = 1m
SG-MICRO... SPRĘŻYNY GAZOWE P.103
 SG-MICRO... SG-MICRO 19 SG-MICRO SG-MICRO H SG-MICRO R SG-MICRO 32 SG-MICRO 32H SG-MICRO 32R SG-MICRO SG-MICRO H SG-MICRO R SG-MICRO 45 SG-MICRO SG-MICRO SG-MICRO 75 SG-MICRO 95 SG-MICRO 0 cylindra body
SG-MICRO... SG-MICRO 19 SG-MICRO SG-MICRO H SG-MICRO R SG-MICRO 32 SG-MICRO 32H SG-MICRO 32R SG-MICRO SG-MICRO H SG-MICRO R SG-MICRO 45 SG-MICRO SG-MICRO SG-MICRO 75 SG-MICRO 95 SG-MICRO 0 cylindra body
BŁĘDY OKREŚLANIA MASY KOŃCOWEJ W ZAKŁADACH SUSZARNICZYCH WYKORZYSTUJĄC METODY LABORATORYJNE
 Inżynieria Rolnicza 5(103)/2008 BŁĘDY OKREŚLANIA MASY KOŃCOWEJ W ZAKŁADACH SUSZARNICZYCH WYKORZYSTUJĄC METODY LABORATORYJNE Zbigniew Zdrojewski, Stanisław Peroń, Mariusz Surma Instytut Inżynierii Rolniczej,
Inżynieria Rolnicza 5(103)/2008 BŁĘDY OKREŚLANIA MASY KOŃCOWEJ W ZAKŁADACH SUSZARNICZYCH WYKORZYSTUJĄC METODY LABORATORYJNE Zbigniew Zdrojewski, Stanisław Peroń, Mariusz Surma Instytut Inżynierii Rolniczej,
(Slant delay mesoscale functions)
") M. Figurski, M. Gałuszkiewicz, P. Kamiński, K. Kroszczyński Mesoscale mapping functions (Slant delay mesoscale functions) M. Figurski, M. Gałuszkiewicz, P. Kamiński, K. Kroszczyński We present a prototype
M. Figurski, M. Gałuszkiewicz, P. Kamiński, K. Kroszczyński Mesoscale mapping functions (Slant delay mesoscale functions) M. Figurski, M. Gałuszkiewicz, P. Kamiński, K. Kroszczyński We present a prototype
Obszar badawczy i zadania geodezji satelitarnej. dr hab. inż. Paweł Zalewski, prof. AM Centrum Inżynierii Ruchu Morskiego
 Obszar badawczy i zadania geodezji satelitarnej dr hab. inż. Paweł Zalewski, prof. AM Centrum Inżynierii Ruchu Morskiego http://cirm.am.szczecin.pl Literatura: 1. Curtis H. : Orbital Mechanics for Engineering
Obszar badawczy i zadania geodezji satelitarnej dr hab. inż. Paweł Zalewski, prof. AM Centrum Inżynierii Ruchu Morskiego http://cirm.am.szczecin.pl Literatura: 1. Curtis H. : Orbital Mechanics for Engineering
Knovel Math: Jakość produktu
 Knovel Math: Jakość produktu Knovel jest agregatorem materiałów pełnotekstowych dostępnych w formacie PDF i interaktywnym. Narzędzia interaktywne Knovel nie są stworzone wokół specjalnych algorytmów wymagających
Knovel Math: Jakość produktu Knovel jest agregatorem materiałów pełnotekstowych dostępnych w formacie PDF i interaktywnym. Narzędzia interaktywne Knovel nie są stworzone wokół specjalnych algorytmów wymagających
Katedra Fizyki Ciała Stałego Uniwersytetu Łódzkiego. Ćwiczenie 2 Badanie funkcji korelacji w przebiegach elektrycznych.
 Katedra Fizyki Ciała Stałego Uniwersytetu Łódzkiego Ćwiczenie Badanie unkcji korelacji w przebiegach elektrycznych. Cel ćwiczenia: Celem ćwiczenia jest zbadanie unkcji korelacji w okresowych sygnałach
Katedra Fizyki Ciała Stałego Uniwersytetu Łódzkiego Ćwiczenie Badanie unkcji korelacji w przebiegach elektrycznych. Cel ćwiczenia: Celem ćwiczenia jest zbadanie unkcji korelacji w okresowych sygnałach
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
ELEKTROTECHNIKA Semestr 2 Rok akad / ZADANIA Z MATEMATYKI Zestaw Oblicz pochodne cząstkowe rzędu drugiego funkcji:
 ZADANIA Z MATEMATYKI Zestaw. Oblicz pochodne cząstkowe funkcji: a) f(x, y) = x sin y x b) f(x, y) = e y +x 2 c) f(x, y, z) = z cos x+y z 2. Oblicz pochodne cząstkowe rzędu drugiego funkcji: 3. Wyznacz
ZADANIA Z MATEMATYKI Zestaw. Oblicz pochodne cząstkowe funkcji: a) f(x, y) = x sin y x b) f(x, y) = e y +x 2 c) f(x, y, z) = z cos x+y z 2. Oblicz pochodne cząstkowe rzędu drugiego funkcji: 3. Wyznacz
Ruch obrotowy i orbitalny Ziemi
 Ruch obrotowy i orbitalny Ziemi Ruch dobowy sfery niebieskiej jest pozorny wynika z obracania się Ziemi wokół własnej osi z okresem równym 1 dobie gwiazdowej. Tor pozornego ruchu dobowego sfery niebieskiej
Ruch obrotowy i orbitalny Ziemi Ruch dobowy sfery niebieskiej jest pozorny wynika z obracania się Ziemi wokół własnej osi z okresem równym 1 dobie gwiazdowej. Tor pozornego ruchu dobowego sfery niebieskiej
Ziemia jako zegar Piotr A. Dybczyński
 Wykład udostępniam na licencji Creative Commons: Ziemia jako zegar Piotr A. Dybczyński Czas gwiazdowy N N N N N N N N N N N s = 0h N s = 0h Czemu taka dziwna tarcza? N s = 0h Czemu taka dziwna tarcza?
Wykład udostępniam na licencji Creative Commons: Ziemia jako zegar Piotr A. Dybczyński Czas gwiazdowy N N N N N N N N N N N s = 0h N s = 0h Czemu taka dziwna tarcza? N s = 0h Czemu taka dziwna tarcza?
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Ziemski układ odniesienia: UKŁADY ODNIESIENIA I PODSTAWY GEODEZJI
 Ziemski układ odniesienia: UKŁADY ODNIESIENIA I PODSTAWY GEODEZJI Ziemski układ odniesienia: UKŁADY ODNIESIENIA I PODSTAWY GEODEZJI Układy odniesienia: ITRF2014 układ międzynarodowy tworzony przez IGN
Ziemski układ odniesienia: UKŁADY ODNIESIENIA I PODSTAWY GEODEZJI Ziemski układ odniesienia: UKŁADY ODNIESIENIA I PODSTAWY GEODEZJI Układy odniesienia: ITRF2014 układ międzynarodowy tworzony przez IGN
ANALIZA SZEREGÓW CZASOWYCH WSPÓŁRZĘDNYCH LOKALNEJ STACJI REFERENCYJNEJ KRUR W KRAKOWIE
 INFRASTRUKTURA I EKOLOGIA TERENÓW WIEJSKICH INFRASTRUCTURE AND ECOLOGY OF RURAL AREAS Analiza szeregów czasowych... Nr 2/200, POLSKA AKADEMIA NAUK, Oddział w Krakowie, s. 07 4 Komisja Technicznej Infrastruktury
INFRASTRUKTURA I EKOLOGIA TERENÓW WIEJSKICH INFRASTRUCTURE AND ECOLOGY OF RURAL AREAS Analiza szeregów czasowych... Nr 2/200, POLSKA AKADEMIA NAUK, Oddział w Krakowie, s. 07 4 Komisja Technicznej Infrastruktury
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
 Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Przetwarzanie Sygnałów Studia Podyplomowe, Automatyka i Robotyka. Wstęp teoretyczny Zmienne losowe Zmienne losowe
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Przetwarzanie Sygnałów Studia Podyplomowe, Automatyka i Robotyka. Wstęp teoretyczny Zmienne losowe Zmienne losowe