Systemy Czasu Rzeczywistego (SCR)
|
|
|
- Kazimiera Jabłońska
- 6 lat temu
- Przeglądów:
Transkrypt


1 SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 6: Szybkie prototypowanie układu sterowania RPC oraz symulacji w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok II, semestr IV dr inż. Tomasz Rutkowski 2017
2 Plan wykładu Projektowanie systemu sterowania: RCP, HIL, Zagadnienia związane z automatycznym generowaniem kodu w środowisku Matlab/Simulink: Matlab Coder Simulink Coder Embeded Coder SimulinkPLC Coder (MATLAB) (SIMULINK) (SIMULINK) (SIMULINK) Szybkie prototypowanie i symulacja w pętli sprzętowej, czyli Matlab/Simulink jako środowiska czasu rzeczywistego: Simulink Desktop Real-Time Simulink Real Time (SOFT REAL-TIME) (HARD REAL-TIME) Sprzętowe środowiska czasu rzeczywistego: dspace
3 Model tworzenia systemu sterowania Modelowanie i symulacja Integracja i testowania Szybkie prototypowanie układu sterowania RCP (ang. Rapid Control Prototyping) Symulacja w pętli sprzętowej HIL (ang. Hardware In the Loop) Implementacja 3
4 MATLAB Coder 4
5 MATLAB Coder MATLAB Coder generuje niezależny kod C/C++ (zgodny z ANSI/ISO) bezpośrednio z kodu języka MATLAB Wygenerowany kod źródłowy jest przenośny i czytelny MATLAB Coder wspiera podzbiór cech i właściwości języka MATLAB (instrukcje sterujące, funkcje, operacje macierzowe, )
6 MATLAB Coder Z języka Mataba do MEX-funkcji: Matlab Coder na generowanie MEX-funckcji, co pozwala na przyspieszenie wykonywania w środowisku Matlaba algorytmów zapisanych w tych funkcjach MEX-funjcje to podprogramy (pliki binarne) dynamicznie linkowane i wykonywane przez interpreter Matlaba Z C, C++, Fortrana do MEX-funkcji: W przypadku gdy użytkownik dysponuje własnym kodem (programami w C, C++ lub Fortranie), można się do niego odwołać bez konieczności jego przepisania z wykorzystaniem języka Matlaba
7 MATLAB Coder Ogólny schemat działania MATLAB Coder Źródło: Matlab Coder

8 MATLAB Coder- przykład Przykład działania MATLAB Coder Źródło: Matlab Coder
9 MATLAB Coder- przykład Przykład działania MATLAB Coder: wygenerowanie przykładowych danych testowych
10 MATLAB Coder- przykład Przykład działania MATLAB Coder: wygenerowanie przykładowych danych testowych
11 MATLAB Coder- przykład Przykład działania MATLAB Coder: generowanie MEX-funkcji

12 MATLAB Coder- przykład Przykład działania MATLAB Coder: generowanie MEX-funkcji
13 MATLAB Coder- przykład Przykład działania MATLAB Coder: weryfikacja poprawności działania wygenerowanej MEX-funkcji
14 MATLAB Coder- przykład Przykład działania MATLAB Coder: weryfikacja poprawności działania wygenerowanej MEX-funkcji
15 MATLAB Coder- przykład Przykład działania MATLAB Coder: weryfikacja poprawności działania wygenerowanej MEX-funkcji
16 MATLAB Coder- przykład Przykład działania MATLAB Coder: wygenerowanie kodu w C samodzielna biblioteka
17 MATLAB Coder- przykład Przykład działania MATLAB Coder: wygenerowanie kodu w C samodzielna biblioteka

18 MATLAB Coder- przykład Przykład działania MATLAB Coder: wygenerowanie kodu w C samodzielna biblioteka
19 MATLAB Coder- przykład Przykład działania MATLAB Coder: wygenerowanie kodu w C samodzielna biblioteka cdn

20 MATLAB Coder- przykład Przykład działania MATLAB Coder: wygenerowanie kodu w C samodzielna biblioteka end
21 SIMULINK Coder 21
22 SIMULINK Coder SIMULINK Coder (dawniej we wcześniejszych wersjach Real-Time Workshop RTW) generuje i uruchamia samodzielny kod C/C++ do rozwijania i testowania algorytmów modelowanych w Simulinku (z wykorzystaniem przybornika Stateflow czy funkcji Matlaba) Kod wynikowy może być wykorzystany w aplikacjach czasu rzeczywistego jak i w aplikacjach nie będących aplikacjami czasu rzeczywistego Kod wynikowy wykorzystuje się w takich celach jak przyspieszanie symulacji, szybkie prototypowanie i testowanie z wykorzystaniem technik rapid-control-prototyping (RCP) oraz hardware-in-the-loop (HIL), Kod wynikowy może być generowany dla trzech różnych grup systemów docelowych (target environments): komputer host z Matlab/Simulink, wbudowane układy mikroprocesorowe czy symulatory czasu rzeczywistego
: Źródło:")
23 SIMULINK Coder Podstawowe grupy systemów docelowych (target environments): Źródło: Simulink Coder
24 SIMULINK Coder Podstawowe grupy systemów docelowych: komputer host z Matlab/Simulink (host executable): typowo to ten sam komputer (host) klasy PC, na którym uruchomione jest środowisko Matlab/Simulink w systemie operacyjnym nie będącym systemem czasu rzeczywistego (niedeterministyczny OS) wbudowane układy mikroprocesorowe (embedded microprocessor): komputer który może być odłączony od komputera hosta, w takim przypadku może funkcjonować jako autonomiczny, samodzielny komputer, stanowiący część większego systemu, pracujący pod kontrolą systemu operacyjnego czasu rzeczywistego (RTOS) deterministycznego OS symulatory czasu rzeczywistego (real-time simulator): jest to inny komputer niż komputer host, może to być komputer klasy PC pracujący pod kontrolą systemu operacyjnego czasu rzeczywistego (RTOS), wygenerowany kod uruchamia się na tej platformie w czasie rzeczywistym Źródło: Simulink Coder



25 SIMULINK Coder Przykłady specyficznych typy systemów docelowych: Źródło: Simulink Coder
26 SIMULINK Coder SIMULINK Coder pozwala interaktywnie dostrajać i monitorować generowany kod używając bloków Simulinka i wbudowanych możliwości analizy do uruchamiania i interakcji z kodem poza środowiskiem MATLABa i Simulinka Tworzy kod ANSI/ISO C i programy wykonywalne dla modeli dyskretnych, ciągłych i hybrydowych Obsługuje cechy słownika danych Simulinka dla całkowitych, zmienno- i stałoprzecinkowych typów danych Tworzy kod dla modeli o jednej i zmiennej częstotliwości próbkowania oraz asynchronicznych Obsługuje jedno- i wielozadaniowe systemy operacyjne oraz środowiska bezoperacyjne (bez systemu operacyjnego) Wykonuje optymalizację kodu polepszającą szybkość uruchamiania programu Pozwala interaktywnie dopasowywać i monitorować utworzony kod wewnątrz lub na zewnątrz Simulinka

27 SIMULINK Coder Diagram generowania kodu Źródło: Simulink Coder
28 SIMULINK Coder- budowa aplikacji 1. Określenie wymogów aplikacji 2. Konfiguracja ustawień generowania kodu 3. Uruchomienie narzędzia wspomagającego (ang. Model Advisor Tool) 4. Ewentualna korekta ustawień konfiguracyjnych z wykorzystaniem raportu z narzędzia wspomagającego 5. Generowanie kodu z modelu Simulinka 6. Ewentualne powtórzenie operacji Zbudowanie obrazu programu wykonywalnego 8. Weryfikacja wyników generowanych przez program wykonywalny w porównaniu do wyników oryginalnego modelu Simulinka 9. Zachowanie konfiguracji dla której dokonano generowania kodu 10. Wykorzystanie narzędzia generowania raportu (ang. Report Generator) do automatycznego udokumentowania projektu
29 SIMULINK Coder- budowa aplikacji Źródło: Simulink Coder
30 SIMULINK Coder- budowa aplikacji Źródło: Simulink Coder
31 SIMULINK Coder- elementy Proces tworzenia aplikacji (ang. Make Process) Proces tworzenia aplikacji, rozszerzalny przez użytkownika umożliwia skonfigurowanie procesów kompilacji i linkowania kodu generowanego dla potrzeb użytkownika lub dla celów szybkiego prototypowania. Tryb zewnętrzny Simulinka (ang. Simulink External Mode) Tryb zewnętrzny umożliwia komunikację pomiędzy Simulinkiem i modelem wykonywanym w środowisku czasu rzeczywistego lub w innym procesie na tym samym komputerze. Tryb zewnętrzny umożliwia strojenie parametrów, zapisywanie danych oraz wizualizację stanu procesu w trakcie wykonywania modelu.
32 SIMULINK Coder- elementy Szybkie symulowanie (ang. Rapid Simulations) Wykorzystując tryb szybkiego symulowania, w S-funkcji lub szybkim symulowaniu można przyspieszyć wykonywanie symulacji średnio od 5 do 20 razy. Pliki wykonywalne w tych systemach omijają normalny tryb interpretatora Simulinka. Kod generowany przez Szybkie symulowanie, docelową S-funkcję i docelowe szybkie symulowanie jest wysoko optymalizowany do wykonywania wyłącznie algorytmów zawartych w modelu użytkownika.

33 SIMULINK Coder- przykład Model obiektu prosty układ amortyzatora wyrażony równaniem różniczkowym drugiego rzędu
34 SIMULINK Coder- przykład Ustawienia parametrów symulacji, generowania kodu wynikowego w C, kompilacji: Krok 1: ustawienia parametrów solvera (procedury numerycznej) wykorzystywanego w trakcie symulacji Krok 2: wybór odpowiedniego kompilatora grt.tlc (Generic Real Time Target, Simulink Coder) Krok 3: weryfikacji czy dokonano wyboru odpowiedniego solvera do przeprowadzenia symulacji z zamodelowanym układem Krok 4: generowanie kodu, kompilacja Krok 5: uruchamianie skompilowanego kodu
35 SIMULINK Coder- przykład Krok 1: parametry symulacji - Solver


36 SIMULINK Coder- przykład Krok 1: parametry symulacji - Solver
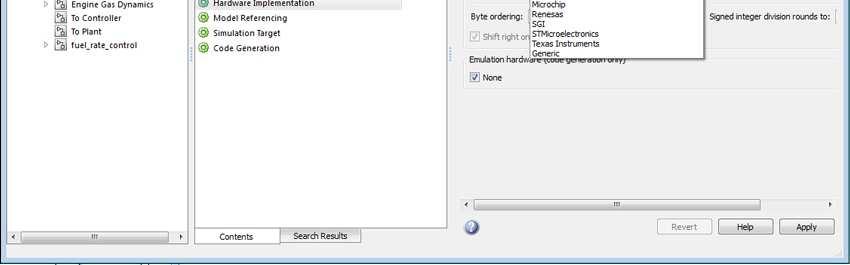
37 SIMULINK Coder- przykład Krok 2: parametry symulacji - Code Generator
38 SIMULINK Coder- przykład Krok 2: parametry symulacji - Code Generator



39 SIMULINK Coder- przykład Krok 2: parametry symulacji - Code Generator
40 SIMULINK Coder- przykład Krok 2: parametry symulacji - Code Generator

41 SIMULINK Coder- przykład Krok 2: parametry symulacji - Code Generator (zapis danych wyjściowych)
42 SIMULINK Coder- przykład Krok 3: symulacyjna weryfikacja ustawień parametrów symulacji - symulacja w trybie Normal
43 SIMULINK Coder- przykład Krok 3: symulacyjna weryfikacja ustawień parametrów symulacji - symulacja w trybie Normal


44 SIMULINK Coder- przykład Krok 3: symulacyjna weryfikacja ustawień parametrów symulacji - symulacja w trybie Normal


45 SIMULINK Coder- przykład Krok 3: symulacyjna weryfikacja ustawień parametrów symulacji - symulacja w trybie Normal

46 SIMULINK Coder- przykład Krok 3: symulacyjna weryfikacja ustawień parametrów symulacji - symulacja w trybie Normal

47 SIMULINK Coder- przykład Krok 3: symulacyjna weryfikacja ustawień parametrów symulacji - symulacja w trybie Normal
48 SIMULINK Coder- przykład Krok 3: symulacyjna weryfikacja ustawień parametrów symulacji - symulacja w trybie Normal Wracamy do poprzednich ustawień solvera procedura numeryczna ode3 procedura numeryczna ode1 w analizowanym przypadku okazała się niestabilna numerycznie
49 SIMULINK Coder- przykład Krok 4: generowanie kodu w C, kompilacja


50 SIMULINK Coder- przykład Krok 4: generowanie kodu w C, kompilacja
51 SIMULINK Coder- przykład Krok 4: generowanie kodu w C, kompilacja


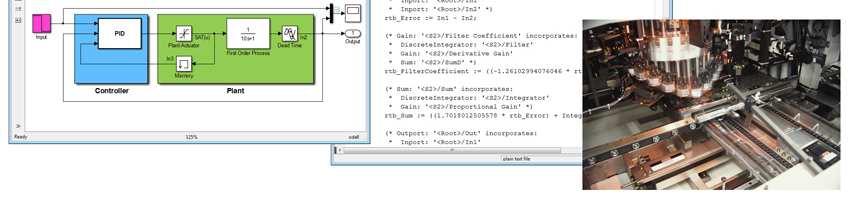
52 SIMULINK Coder- przykład Model systemu generowanie kodu w C


53 SIMULINK Coder- przykład Model systemu generowanie kodu w C


54 SIMULINK Coder- przykład Krok 4: generowanie kodu w C, kompilacja


55 SIMULINK Coder- przykład Krok 5: uruchamianie skompilowanego kodu
56 SIMULINK Coder- przykład Krok 5: uruchamianie skompilowanego kodu W wygenerowanych plikach znajduje się cały kod, reprezentujący modelowany system oraz ustawioną na etapie konfiguracji metodę obliczeń numerycznych Konieczne jest jeszcze ustawienie metody zapisu danych wyjściowych uruchomianego na bazie wygenerowanego kodu modelu systemu (do tej pory zostały ustawienia domyślne zapis danych wyjściowych do workspace głównego Matlaba), wymaga to powrotu do Kroku 2 i Kroku 4 opisywanej procedury Wygenerowany kod, po uruchomieniu będzie zapisywał dane wejściowe do pliku *.mat
57 SIMULINK Coder- przykład Krok 2: parametry symulacji - Code Generator (zapis danych wyjściowych)

58 SIMULINK Coder- przykład Krok 4: generowanie kodu w C, kompilacja

59 SIMULINK Coder- przykład Krok 5: uruchamianie skompilowanego kodu Po uruchomieniu w konsoli Windows plik rtwdemo_secondordersystem.exe dane wyjściowe symulacji są zapisane w pliku zewnętrznym *.mat Alternatywnie można wpisać w Matlabie polecenie!rtwdemo_secondordersystem

60 SIMULINK Coder- przykład Krok 6: weryfikacja danych zapisanych po symulacji


61 SIMULINK Coder- przykład Krok 6: weryfikacja danych zapisanych po symulacji
62 Embeded Coder 62
63 Embeded Coder Rozszerza możliwości MATLAB Coder i Simulink Coder zwłaszcza jeżeli chodzi o systemy czasu rzeczywistego, Generowany kod może być uruchamiany bez lub w systemie operacyjnym czasu rzeczywistego w trybie jednozadaniowym, wielozadaniowym lub asynchronicznym Generuje kod dla wielu typów mikroprocesorów, procesorów sygnałowych o architekturze 8-bitowej, 16- bitowej i 32-bitowej, Wygenerowany kod można przetestować w trybie softwarein-the-loop (SIL) i processor-in-the-loop (PIL)

64 Embeded Coder Źródło: Embeded Coder
65 Simulink PLC Coder 65
66 Simulink PLC Coder Simulink PLC Coder generuje sprzętowo niezależny kod w języku ST (Structured Text) zgodny z normą IEC z modeli Simulinka, diagramów Stateflow i funkcji Embedded MATLAB, Kod jest generowany do plików w formatach obsługiwanych przez wiele popularnych środowisk (IDE): B&R Automation Studio, PLCopen XML, Rockwell Automation RSlogix 5000, Siemens SIMATIC STEP 7, 3S-Smart Software Solutions CoDeSys, W efekcie można go skompilować i wdrożyć do wielu sterowników programowalnych typu PLC i PAC,

67 Simulink PLC Coder Źródło: Simulink PLC Coder

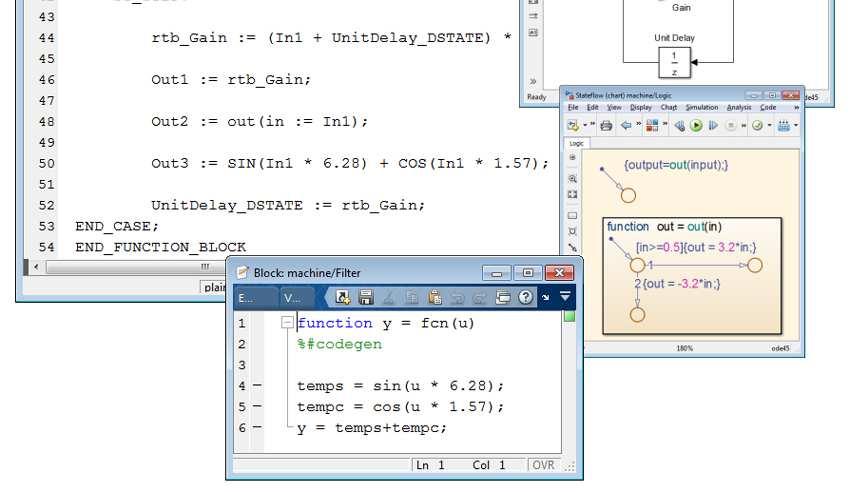
68 Simulink PLC Coder Źródło: Simulink PLC Coder
69 Simulink Desktop Real-Time 69
70 Simulink Desktop Real-Time (SLDRT) Simulink Desktop Real-Time pozwala uruchamiać i kontrolować modele Simulinka i Stateflow w czasie rzeczywistym na komputerze PC typu desktop lub laptop Używając Simulink Coder można generować kod C, kompilować go i rozpocząć uruchamianie w czasie rzeczywistym w systemie Windows z równoczesnym wykorzystaniem kart akwizycji danych (kart we/wy dla komputera PC) Inne aplikacje systemu Windows nie przestają pracować w trakcie wykonywania zadania uruchomionego w Simulink Desktop Real-Time
71 Simulink Desktop Real-Time (SLDRT) Simulink Desktop Real-Time: może pracować w dwóch trybach: normal i external (wymagany SIMULINK Coder), w trybie normal umożliwia próbkowanie do 1 khz w trybie external umożliwia próbkowanie do 20 khz współpracuje z ponad 250 modułami wejść-wyjść (karty akwizycji danych) ora modułami komunikacyjnymi (protokoły UDP, CAN, szeregowy), umożliwia stosowanie graficznego interfejsu użytkownika w celu: wizualizowania sygnałów podczas symulacji używa się tych samych bloków co podczas zwykłej programowej symulacji zmiany parametrów w trakcie symulacji
72 Simulink Desktop Real-Time (SLDRT) Typowe zastosowania: Symulacje w czasie rzeczywistym opracowywanie prototypów algorytmów sterowania, urządzeń wbudowanych np. peryferiów komputerowych, elementów układów sterowania Symulacje typu RCP i HIL opracowywania sterowników, regulatorów podłączonych do fizycznych obiektów Edukacja zobrazowanie procesu projektowania, testowania, budowy prototypów
73 Simulink Desktop Real-Time (SLDRT) Działanie: Simulink Desktop Real-Time wykorzystuje małe jądro czasu rzeczywistego w celu zapewnienia wykonania modelu w czasie rzeczywistym. Jądro to wykorzystuje wbudowany w PC zegar jako podstawowe źródło czasu. Jądro przejmuje przerwania z zegara komputera przed otrzymaniem ich przez system operacyjny Windows. Następnie jądro używa przerwań do wyzwalania wykonania skompilowanego modelu. W wyniku takiego podejścia jądro jest w stanie nadać aplikacji czasu rzeczywistego najwyższy możliwy priorytet. W celu uzyskania dokładnego próbkowania jądro przełącza zegar PC na wyższą częstotliwość. Ponieważ jest to również źródło czasu dla systemu operacyjnego, jądro Simulink Desktop Real-Time wysyła do systemu operacyjnego przerwania z oryginalną częstotliwością.
74 Simulink Desktop Real-Time (SLDRT) Źródło: Simulink Desktop Real-Time
75 Simulink Desktop Real-Time (SLDRT) Źródło: Simulink Desktop Real-Time
76 Simulink Desktop Real-Time (SLDRT) Środowisko (sprzęt, system operacyjny): Dowolny PC z Windows od NT4.0 do Win10, wsparcie dla innych systemów operacyjnych (Linux, Mac OS) Karty akwizycji danych dla PC wskazane przez Mathworks, w wykazie znajduje się duża liczba producentów i (ponad 250) konkretnych kart wykorzystujących różne interfejsy: ISA, PCI, PCMCIA Karty posiadają AI, DI, AO, DO, wejścia enkoderów,

77 Simulink Desktop Real-Time (SLDRT)
78 Simulink Desktop Real-Time (SLDRT) Karta akwizycji danych Adavantech PCI 1711 Rozdzielczość: 12 bitów Liczba wejść analogowych: 16 SE (ze wspólną masą) Zakresy wejściowe napięciowe: bipolarne Szybkość przetwornika A/C: 100kS/s Liczba wyjść analogowych: 2 Zakresy wyjściowe napięciowe: unipolarne 16 wejść cyfrowych TTL 16 wyjść cyfrowych TTL 1 szesnastobitowy licznik TTL

79 Simulink Desktop Real-Time (SLDRT) Schemat blokowy karty PCI
80 Simulink Desktop Real-Time (SLDRT) Normalizacja i skalowanie we/wy: Bloki we i wy analogowych można skonfigurować tak by w Matlabie/Simulinku można pracować z danymi: w postaci jednostek fizycznych (Volty) w postaci jednostek inżynierskich (znormalizowanych): normalizacja unipolarna normalizacja bipolarna
81 Simulink Desktop Real-Time (SLDRT) normalizacja bipolarna i unipolarna: 0-5V
82 Simulink Desktop Real-Time (SLDRT) normalizacja bipolarna i unipolarna: 0-10V
83 Simulink Desktop Real-Time (SLDRT) -przykład Opis infrastruktury fizycznej analizowanego systemu poza komputerem PC. W analizowanym przykładzie: napięcie wyjściowe z prostego zadajnika w postaci dzielnika napięcia (potencjometr wieloobrotowy) doprowadzone jest na pierwsze wejście analogowe (AI1) karty akwizycji danych, sygnał napięciowy z pierwszego wyjścia analogowego (AQ1) karty akwizycji danych doprowadzony jest (za pomocą pary przewodów) do drugiego wejścia analogowego (AI2) karty akwizycji danych
84 Simulink Desktop Real-Time (SLDRT) -przykład Opis infrastruktury programowej analizowanego systemu, zaimplementowanej w środowisku Matlab/Simulink SLDRT w komputerze PC.
85 Simulink Desktop Real-Time (SLDRT) -przykład Opis infrastruktury programowej analizowanego systemu, zaimplementowanej w środowisku Matlab/Simulink SLDRT w komputerze PC. AI1 AO1 AI2
86 Simulink Desktop Real-Time (SLDRT) -przykład Ustawienia parametrów symulacji i kompilacji zamodelowanego układu: Krok 1: ustawienia parametrów bloków przybornika (SLDRT) związanych np. z we/wy kart analogowych itp.. Krok 2: ustawienia parametrów solvera (procedury numerycznej) wykorzystywanego w trakcie symulacji Krok 3: wybór odpowiedniego kompilatora sldrt.tlc Krok 4: kompilacja zamodelowanego układu Krok 5: uruchamianie skompilowanego kodu
 związanych np.")
87 Simulink Desktop Real-Time (SLDRT) -przykład Krok 1: ustawienia parametrów bloków przybornika (SLDRT) związanych np. z we/wy kart analogowych itp..
88 Simulink Desktop Real-Time (SLDRT) -przykład Krok 1: ustawienia parametrów bloków przybornika (SLDRT) związanych np. z we/wy kart analogowych itp..

")


89 Simulink Desktop Real-Time (SLDRT) -przykład Krok 1: ustawienia parametrów bloków

")

90 . Simulink Desktop Real-Time (SLDRT) -przykład Krok 1: ustawienia parametrów bloków
")

91 Simulink Desktop Real-Time (SLDRT) -przykład Krok 1: ustawienia parametrów bloków
")

92 Simulink Desktop Real-Time (SLDRT) -przykład Krok 1: ustawienia parametrów bloków
 wykorzystywanego w trakcie")
93 Simulink Desktop Real-Time (SLDRT) -przykład Krok 2: ustawienia parametrów solvera (procedury numerycznej) wykorzystywanego w trakcie symulacji
 wykorzystywanego w trakcie")
94 Simulink Desktop Real-Time (SLDRT) -przykład Krok 2: ustawienia parametrów solvera (procedury numerycznej) wykorzystywanego w trakcie symulacji

 wykorzystywanego w")
95 . Simulink Desktop Real-Time (SLDRT) -przykład Krok 2: ustawienia parametrów solvera (procedury numerycznej) wykorzystywanego w trakcie symulacji
96 Simulink Desktop Real-Time (SLDRT) -przykład Krok 3: wybór odpowiedniego kompilatora sldrt.tlc
")

97 Simulink Desktop Real-Time (SLDRT) -przykład Krok 3: wybór odpowiedniego kompilatora sldrt.tlc

")
98 . Simulink Desktop Real-Time (SLDRT) -przykład

99 Simulink Desktop Real-Time (SLDRT) -przykład Krok 4: kompilacja zamodelowanego układu

")
100 . Simulink Desktop Real-Time (SLDRT) -przykład 1

101 Simulink Desktop Real-Time (SLDRT) -przykład Krok 5: uruchamianie skompilowanego kodu

102 Simulink Desktop Real-Time (SLDRT) -przykład 1 Krok 5: uruchamianie skompilowanego kodu
103 Simulink Real-Time 103
104 Simulink Real-Time Simulink Real-Time uruchamia aplikacje generowane przez modele Simulinka i Stateflow używając jądra czasu rzeczywistego na dowolnym komputerze PC Obsługuje dowolny komputer PC jako docelowy system czasu rzeczywistego Uzyskuje próbki z częstotliwością do 100 KHz, w zależności od poziomu wydajności procesora i rozmiaru modelu Wyświetla dane i ślady sygnałów na lokalnym, docelowym lub obu komputerach PC Zapewnia lokalny zintegrowany graficzny interfejs użytkownika
105 Simulink Real-Time Wykorzystuje się dwa oddzielne komputery PC, jeden PC do projektowania (tzw. host/development computer) i drugi PC do wykonywania modelu czasu rzeczywistego (target computer), Połączenie obu PC za pomocą: RS232 lub TCP/IP, Źródło: Similink Real-Time
106 Simulink Real-Time Komputer host: jest wyposażony w Matlab/Simulink, SIMULINK Coder, Simulink Real-Time Komputer target: nie potrzebuje systemu operacyjnego DOS, Linux czy Windows., można uruchomić: z dyskietki, która zawiera wysoko zoptymalizowane jądro czasu rzeczywistego Simulink Real-Time wysyłając cały projekt przez sieć TCP/IP Źródło: Similink Real-Time
107 Simulink Real-Time Źródło:
108 Simulink Real-Time Przykład Źródło: Similink Real-Time


109 Simulink Real-Time Przykład Źródło: Similink Real-Time
110 Simulink Real-Time Przykład Po zweryfikowaniu poprawności doboru solvera, układ zostaje skompilowany i wysłany na komputer docelowy (target) gdzie wykonuje się w czasie rzeczywistym


111 Simulink Real-Time Przykład Źródło: xpc


112 Simulink Real-Time Przykład Źródło: Similink Real-Time
113 dspace 113
114 dspace Jest to sprzętowo-programowy system czasu rzeczywistego oparty o środowisko Matlab/Simulink, Modelowanie (host computer) realizowane jest klasycznie w Matlabie/Simulinku natomiast wykonywanie modelu (target computer) wykonywane jest na platformie, sprzętowej z procesorem/procesorami sygnałowymi DSP. Dzięki temu uzyskuje się dużą rozdzielczość czasową, Rozwija firma dspace GMBH, Znajduje szerokie zastosowanie w przemyśle samochodowym i lotniczym,
115 dspace Źródło:
116 Bibliografia Matlab Compiler, User s guide, MathWorks 2015 Matalb Coder, User s guide, MathWorks 2015 Simulink Coder, User s guide, MathWorks 2015 Embeded Coder User s guide, MathWorks 2015 SimulinkPLC Coder User s guide, MathWorks 2015 Simulink Real-Time, User s guide, MathWorks 2015 Simulink Desktop Real-Time, User s guide, MathWorks
117 Dziękuję za uwagę!!! 117
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Idea szybkiego prototypowania układu sterowania RPC oraz symulacja w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink Politechnika
Systemy Czasu Rzeczywistego (SCR) Idea szybkiego prototypowania układu sterowania RPC oraz symulacja w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink Politechnika
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Prototypowanie systemów sterowania
 Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 6 Zasady testowania w czasie
Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 6 Zasady testowania w czasie
Systemy Czasu Rzeczywistego (SCR)
") SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 5: Modele projektowania systemu sterowania, idea szybkiego prototypowania układu sterowania RPC oraz symulacji w pętli sprzętowej HIL wprowadzenie WYDZIAŁ
SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 5: Modele projektowania systemu sterowania, idea szybkiego prototypowania układu sterowania RPC oraz symulacji w pętli sprzętowej HIL wprowadzenie WYDZIAŁ
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink
 Materiały pomocnicze do przedmiotu Systemy Czasu Rzeczywistego Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink Zawartość Czym jest Real-Time Windows Target (RTWT)?... 2 Bloki wejśd i wyjśd
Materiały pomocnicze do przedmiotu Systemy Czasu Rzeczywistego Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink Zawartość Czym jest Real-Time Windows Target (RTWT)?... 2 Bloki wejśd i wyjśd
Materiały dodatkowe. Simulink Real-Time
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink Real-Time Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Wstęp Simulink Real-Time jest środowiskiem pozwalającym na tworzenie
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink Real-Time Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Wstęp Simulink Real-Time jest środowiskiem pozwalającym na tworzenie
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Materiały dodatkowe. Simulink PLC Coder
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Elektrotechnika II Stopień (I stopień / II stopień) Ogólno akademicki (ogólno akademicki / praktyczny)
 Ogólno akademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu. Dynamicznych. Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Metody integracji systemów sterowania z wykorzystaniem standardu OPC
 Metody integracji systemów sterowania z wykorzystaniem standardu OPC (Control Systems Integration using OPC Standard) Autor: Marcin BAJER Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
Metody integracji systemów sterowania z wykorzystaniem standardu OPC (Control Systems Integration using OPC Standard) Autor: Marcin BAJER Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy. Obowiązkowy Polski VI semestr zimowy
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Szybkie prototypowanie z wykorzystaniem systemu modułowego dspace DS1005 oraz oprogramowania RTI i ControlDesk
 dr inż. Mieczysław Zaczyk Katedra Automatyki i Inżynierii Biomedycznej AGH Kraków, al. Mickiewicza 30 e-mail: zaczyk@agh.edu.pl Szybkie prototypowanie z wykorzystaniem systemu modułowego dspace DS1005
dr inż. Mieczysław Zaczyk Katedra Automatyki i Inżynierii Biomedycznej AGH Kraków, al. Mickiewicza 30 e-mail: zaczyk@agh.edu.pl Szybkie prototypowanie z wykorzystaniem systemu modułowego dspace DS1005
Materiały dodatkowe. Raspberry Pi
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Raspberry Pi Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i służą
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Raspberry Pi Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i służą
Schemat blokowy karty
 Obsługa kart I/O Karta NI USB-6008 posiada: osiem wejść analogowych (AI), dwa wyjścia analogowe (AO), 12 cyfrowych wejść-wyjść (DIO), 32-bitowy licznik. Schemat blokowy karty Podstawowe parametry karty
Obsługa kart I/O Karta NI USB-6008 posiada: osiem wejść analogowych (AI), dwa wyjścia analogowe (AO), 12 cyfrowych wejść-wyjść (DIO), 32-bitowy licznik. Schemat blokowy karty Podstawowe parametry karty
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Systemy Wbudowane. Założenia i cele przedmiotu: Określenie przedmiotów wprowadzających wraz z wymaganiami wstępnymi: Opis form zajęć
 Systemy Wbudowane Kod przedmiotu: SW Rodzaj przedmiotu: kierunkowy ; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Specjalność (specjalizacja): - Poziom studiów: pierwszego stopnia Profil studiów:
Systemy Wbudowane Kod przedmiotu: SW Rodzaj przedmiotu: kierunkowy ; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Specjalność (specjalizacja): - Poziom studiów: pierwszego stopnia Profil studiów:
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych
 ZP/UR/46/203 Zał. nr a do siwz Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych Przedmiot zamówienia obejmuje następujące elementy: L.p. Nazwa Ilość. Zestawienie komputera
ZP/UR/46/203 Zał. nr a do siwz Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych Przedmiot zamówienia obejmuje następujące elementy: L.p. Nazwa Ilość. Zestawienie komputera
Szybkie prototypowanie z wykorzystaniem sterownika dspace DS1104 oraz oprogramowania RTI i ControlDesk
 dr inż. Mieczysław Zaczyk Katedra Automatyki i Inżynierii Biomedycznej AGH Kraków, al. Mickiewicza 30 e-mail: zaczyk@agh.edu.pl Szybkie prototypowanie z wykorzystaniem sterownika dspace DS1104 oraz oprogramowania
dr inż. Mieczysław Zaczyk Katedra Automatyki i Inżynierii Biomedycznej AGH Kraków, al. Mickiewicza 30 e-mail: zaczyk@agh.edu.pl Szybkie prototypowanie z wykorzystaniem sterownika dspace DS1104 oraz oprogramowania
Wybrane środowiska szybkiego prototypowania
 Wybrane środowiska szybkiego prototypowania SIMULINK REAL-TIME (DAWNIEJ XPC TARGET) SIMULINK SUPPORT PACKAGE FOR RASPBERRY PI HARDWARE PRZYGOTOWAŁ TOMASZ KARLA MATLAB/Simulink Real-Time (dawniej xpc Target)
Wybrane środowiska szybkiego prototypowania SIMULINK REAL-TIME (DAWNIEJ XPC TARGET) SIMULINK SUPPORT PACKAGE FOR RASPBERRY PI HARDWARE PRZYGOTOWAŁ TOMASZ KARLA MATLAB/Simulink Real-Time (dawniej xpc Target)
JĘZYKI PROGRAMOWANIA STEROWNIKÓW
 JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
Spis treści 1. Wstęp 2. Ćwiczenia laboratoryjne LPM
 Spis treści 1. Wstęp... 9 2. Ćwiczenia laboratoryjne... 12 2.1. Środowisko projektowania Quartus II dla układów FPGA Altera... 12 2.1.1. Cel ćwiczenia... 12 2.1.2. Wprowadzenie... 12 2.1.3. Przebieg ćwiczenia...
Spis treści 1. Wstęp... 9 2. Ćwiczenia laboratoryjne... 12 2.1. Środowisko projektowania Quartus II dla układów FPGA Altera... 12 2.1.1. Cel ćwiczenia... 12 2.1.2. Wprowadzenie... 12 2.1.3. Przebieg ćwiczenia...
Internet jako środowisko WL OZE/URE Propozycja metodologii badań oraz stanowiska laboratoryjnego
 1 Internet jako środowisko WL OZE/URE Propozycja metodologii badań oraz stanowiska laboratoryjnego 2 Proponowana metodologia oraz stanowisko umożliwi przeprowadzenie badań związanych z infrastrukturą zarządzającą
1 Internet jako środowisko WL OZE/URE Propozycja metodologii badań oraz stanowiska laboratoryjnego 2 Proponowana metodologia oraz stanowisko umożliwi przeprowadzenie badań związanych z infrastrukturą zarządzającą
Metody optymalizacji soft-procesorów NIOS
 POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Warszawa, 27.01.2011
POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Warszawa, 27.01.2011
Podstawowe zagadnienia
 SWB - Systemy operacyjne w systemach wbudowanych - wykład 14 asz 1 Podstawowe zagadnienia System operacyjny System czasu rzeczywistego Systemy wbudowane a system operacyjny Przykłady systemów operacyjnych
SWB - Systemy operacyjne w systemach wbudowanych - wykład 14 asz 1 Podstawowe zagadnienia System operacyjny System czasu rzeczywistego Systemy wbudowane a system operacyjny Przykłady systemów operacyjnych
Systemy wbudowane. Paweł Pełczyński ppelczynski@swspiz.pl
 Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Programowanie Układów Logicznych kod kursu: ETD6203. Szczegóły realizacji projektu indywidualnego W dr inż.
 Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
2.2 Opis części programowej
 2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
OPBOX ver USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych ze
 OPBOX ver 2.0 - USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych ze OPBOX ver 2.0 - USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych Charakterystyka OPBOX 2.0 wraz z dostarczanym oprogramowaniem
OPBOX ver 2.0 - USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych ze OPBOX ver 2.0 - USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych Charakterystyka OPBOX 2.0 wraz z dostarczanym oprogramowaniem
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
XXXII Olimpiada Wiedzy Elektrycznej i Elektronicznej. XXXII Olimpiada Wiedzy Elektrycznej i Elektronicznej
 Zestaw pytań finałowych numer : 1 1. Wzmacniacz prądu stałego: własności, podstawowe rozwiązania układowe 2. Cyfrowy układ sekwencyjny - schemat blokowy, sygnały wejściowe i wyjściowe, zasady syntezy 3.
Zestaw pytań finałowych numer : 1 1. Wzmacniacz prądu stałego: własności, podstawowe rozwiązania układowe 2. Cyfrowy układ sekwencyjny - schemat blokowy, sygnały wejściowe i wyjściowe, zasady syntezy 3.
2013-04-25. Czujniki obiektowe Sterowniki przemysłowe
 Ogólne informacje o systemach komputerowych stosowanych w sterowaniu ruchem funkcje, właściwości Sieci komputerowe w sterowaniu informacje ogólne, model TCP/IP, protokoły warstwy internetowej i transportowej
Ogólne informacje o systemach komputerowych stosowanych w sterowaniu ruchem funkcje, właściwości Sieci komputerowe w sterowaniu informacje ogólne, model TCP/IP, protokoły warstwy internetowej i transportowej
Sterowniki programowalne Programmable Controllers. Energetyka I stopień Ogólnoakademicki. przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Realizacje regulatorów PID w sterownikach PLC Siemens S7-1200
 D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
sterownik VCR v 1. 0
 sterownik VCR v 1.0 1 I. DANE TECHNICZNE...2 1 Budowa...2 2 Dane znamionowe...2 II. INSTRUKCJA UŻYTKOWANIA...3 1 Programowanie sterownika...3 2 Symulacja algorytmu...3 3 Możliwości kalendarza...4 3.1 Wgrywanie
sterownik VCR v 1.0 1 I. DANE TECHNICZNE...2 1 Budowa...2 2 Dane znamionowe...2 II. INSTRUKCJA UŻYTKOWANIA...3 1 Programowanie sterownika...3 2 Symulacja algorytmu...3 3 Możliwości kalendarza...4 3.1 Wgrywanie
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Podstawy programowanie systemów wbudowanych na bazie platformy sprzętowo-programowej
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Podstawy programowanie systemów wbudowanych na bazie platformy sprzętowo-programowej
Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej
 Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Instrukcja do zajęć laboratoryjnych z przedmiotu: Przetwarzanie Sygnałów Kod: TS1C400027 Temat ćwiczenia:
Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Instrukcja do zajęć laboratoryjnych z przedmiotu: Przetwarzanie Sygnałów Kod: TS1C400027 Temat ćwiczenia:
ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES
 RYSZARD DINDORF, PAWEŁ ŁASKI, JAKUB TAKOSHOGLU, PIOTR WOŚ ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES S
RYSZARD DINDORF, PAWEŁ ŁASKI, JAKUB TAKOSHOGLU, PIOTR WOŚ ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES S
Marek Parfieniuk, Tomasz Łukaszuk, Tomasz Grześ. Symulator zawodnej sieci IP do badania aplikacji multimedialnych i peer-to-peer
 Marek Parfieniuk, Tomasz Łukaszuk, Tomasz Grześ Symulator zawodnej sieci IP do badania aplikacji multimedialnych i peer-to-peer Plan prezentacji 1. Cel projektu 2. Cechy systemu 3. Budowa systemu: Agent
Marek Parfieniuk, Tomasz Łukaszuk, Tomasz Grześ Symulator zawodnej sieci IP do badania aplikacji multimedialnych i peer-to-peer Plan prezentacji 1. Cel projektu 2. Cechy systemu 3. Budowa systemu: Agent
Mechatronika i szybkie prototypowanie układów sterowania
 Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Instytut Systemów Elektronicznych. Specjalność Systemy Informacyjno-Pomiarowe
 Instytut Systemów Elektronicznych Specjalność Systemy Informacyjno-Pomiarowe Charakterystyka specjalności Czym jest system informacyjno-pomiarowy? Elektroniczny system zbierania, przesyłania, przetwarzania,
Instytut Systemów Elektronicznych Specjalność Systemy Informacyjno-Pomiarowe Charakterystyka specjalności Czym jest system informacyjno-pomiarowy? Elektroniczny system zbierania, przesyłania, przetwarzania,
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Oprogramowanie komputerowych systemów sterowania
 Budowa i oprogramowanie komputerowych systemów sterowania Wykład 3 Oprogramowanie komputerowych systemów sterowania Wprowadzenie W komputerowych systemach automatyki wyróżnia się dwa ściśle z sobą powiązane
Budowa i oprogramowanie komputerowych systemów sterowania Wykład 3 Oprogramowanie komputerowych systemów sterowania Wprowadzenie W komputerowych systemach automatyki wyróżnia się dwa ściśle z sobą powiązane
Embedded Solutions Automaticon 2012. Efektywne pomiary i sterowanie przy użyciu systemu wbudowanego MicroDAQ
 Embedded Solutions Automaticon 2012 Efektywne pomiary i sterowanie przy użyciu systemu wbudowanego MicroDAQ Grzegorz Skiba info@embedded-solutions.pl 1 Plan seminarium Budowa systemu MicroDAQ Zastosowanie
Embedded Solutions Automaticon 2012 Efektywne pomiary i sterowanie przy użyciu systemu wbudowanego MicroDAQ Grzegorz Skiba info@embedded-solutions.pl 1 Plan seminarium Budowa systemu MicroDAQ Zastosowanie
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Tom 6 Opis oprogramowania Część 8 Narzędzie do kontroli danych elementarnych, danych wynikowych oraz kontroli obmiaru do celów fakturowania
 Część 8 Narzędzie do kontroli danych elementarnych, danych wynikowych oraz kontroli Diagnostyka stanu nawierzchni - DSN Generalna Dyrekcja Dróg Krajowych i Autostrad Warszawa, 21 maja 2012 Historia dokumentu
Część 8 Narzędzie do kontroli danych elementarnych, danych wynikowych oraz kontroli Diagnostyka stanu nawierzchni - DSN Generalna Dyrekcja Dróg Krajowych i Autostrad Warszawa, 21 maja 2012 Historia dokumentu
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
Simulink MATLAB Przegląd obiektów i przykłady zastosowań
 Simulink MATLAB Przegląd obiektów i przykłady zastosowań M. Berndt-Schreiber 1 Simulink MATLAB SIMULINK jest rozszerzeniem pakietu MATLAB; przy pomocy graficznego środowiska pozwala konstruować diagramy
Simulink MATLAB Przegląd obiektów i przykłady zastosowań M. Berndt-Schreiber 1 Simulink MATLAB SIMULINK jest rozszerzeniem pakietu MATLAB; przy pomocy graficznego środowiska pozwala konstruować diagramy
Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA. Autor: Daniel Słowik
 Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA Autor: Daniel Słowik Promotor: Dr inż. Daniel Kopiec Wrocław 016 Plan prezentacji Założenia i cel
Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA Autor: Daniel Słowik Promotor: Dr inż. Daniel Kopiec Wrocław 016 Plan prezentacji Założenia i cel
ICD Wprowadzenie. Wprowadzenie. Czym jest In-Circuit Debugger? 2. O poradniku 3. Gdzie szukać dodatkowych informacji? 4
 ICD 2 Czym jest In-Circuit Debugger? 2 O poradniku 3 Gdzie szukać dodatkowych informacji? 4 ICD 1 ICD 25.08.2009 Czym jest In-Circuit Debugger? Większość procesorów dostarcza systemów debugowania (ang.
ICD 2 Czym jest In-Circuit Debugger? 2 O poradniku 3 Gdzie szukać dodatkowych informacji? 4 ICD 1 ICD 25.08.2009 Czym jest In-Circuit Debugger? Większość procesorów dostarcza systemów debugowania (ang.
Algorytmy sztucznej inteligencji
 Algorytmy sztucznej inteligencji Dynamiczne sieci neuronowe 1 Zapis macierzowy sieci neuronowych Poniżej omówione zostaną części składowe sieci neuronowych i metoda ich zapisu za pomocą macierzy. Obliczenia
Algorytmy sztucznej inteligencji Dynamiczne sieci neuronowe 1 Zapis macierzowy sieci neuronowych Poniżej omówione zostaną części składowe sieci neuronowych i metoda ich zapisu za pomocą macierzy. Obliczenia
Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej
 Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Instrukcja do zajęć laboratoryjnych z przedmiotu: Przetwarzanie Sygnałów Kod: TS1A400027 Temat ćwiczenia:
Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Instrukcja do zajęć laboratoryjnych z przedmiotu: Przetwarzanie Sygnałów Kod: TS1A400027 Temat ćwiczenia:
Wprowadzenie. Dariusz Wawrzyniak. Miejsce, rola i zadania systemu operacyjnego w oprogramowaniu komputera
 Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Definicja systemu operacyjnego (1) Miejsce,
Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Definicja systemu operacyjnego (1) Miejsce,
Projektowanie bazujące na modelach
 Projektowanie mechatroniczne. Projektowanie bazujące na modelach Krzysztof Pietrusewicz 1. Wprowadzenie W artykule niniejszym przedstawiono problematykę realizacji innowacyjnych prac nad systemami sterowania
Projektowanie mechatroniczne. Projektowanie bazujące na modelach Krzysztof Pietrusewicz 1. Wprowadzenie W artykule niniejszym przedstawiono problematykę realizacji innowacyjnych prac nad systemami sterowania
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Programowanie mikrokontroleroẃ i mikroprocesoroẃ Rok akademicki: 2017/2018 Kod: EIT-1-408-s Punkty ECTS: 4 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek:
Nazwa modułu: Programowanie mikrokontroleroẃ i mikroprocesoroẃ Rok akademicki: 2017/2018 Kod: EIT-1-408-s Punkty ECTS: 4 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek:
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
PROJEKT WSPÓŁFINANSOWANY ZE ŚRODKÓW UNII EUROPEJSKIEJ W RAMACH EUROPEJSKIEGO FUNDUSZU SPOŁECZNEGO OPIS PRZEDMIOTU. Sieci i sterowniki przemysłowe
 OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
Wprowadzenie. Dariusz Wawrzyniak. Miejsce, rola i zadania systemu operacyjnego w oprogramowaniu komputera
 Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Miejsce, rola i zadania systemu operacyjnego
Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Miejsce, rola i zadania systemu operacyjnego
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Systemy operacyjne. Wprowadzenie. Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak
 Wprowadzenie Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego
Wprowadzenie Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
Pierwsze kroki z easy Soft CoDeSys. 2009 Eaton Corporation. All rights reserved.
 Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Sterowniki PLC. Elektrotechnika II stopień Ogólno akademicki. przedmiot kierunkowy. Obieralny. Polski. semestr 1
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E2T-09-s2 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable Logic
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E2T-09-s2 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable Logic
Inteligentny czujnik w strukturze sieci rozległej
 Inteligentny czujnik w strukturze sieci rozległej Tadeusz Pietraszek Zakopane, 13 czerwca 2002 Plan prezentacji Problematyka pomiarów stężenia gazów w obiektach Koncepcja realizacji rozproszonego systemu
Inteligentny czujnik w strukturze sieci rozległej Tadeusz Pietraszek Zakopane, 13 czerwca 2002 Plan prezentacji Problematyka pomiarów stężenia gazów w obiektach Koncepcja realizacji rozproszonego systemu
POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych. Instytut Telekomunikacji Zakład Podstaw Telekomunikacji
 POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Opiekun naukowy: dr
POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Opiekun naukowy: dr
Rok akademicki: 2030/2031 Kod: EAR s Punkty ECTS: 3. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Podstawy komputerowych systemów sterowania Rok akademicki: 2030/2031 Kod: EAR-1-702-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek:
Nazwa modułu: Podstawy komputerowych systemów sterowania Rok akademicki: 2030/2031 Kod: EAR-1-702-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek:
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Jednostki obliczeniowe w zastosowaniach mechatronicznych Kierunek: Mechatronika Rodzaj przedmiotu: dla specjalności Systemy Sterowania Rodzaj zajęć: Wykład, laboratorium Computational
Nazwa przedmiotu: Jednostki obliczeniowe w zastosowaniach mechatronicznych Kierunek: Mechatronika Rodzaj przedmiotu: dla specjalności Systemy Sterowania Rodzaj zajęć: Wykład, laboratorium Computational
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Kurs Zaawansowany S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Efekty kształcenia na kierunku AiR drugiego stopnia - Wiedza Wydziału Elektrotechniki, Automatyki i Informatyki Politechniki Opolskiej
 Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Technika mikroprocesorowa. Struktura programu użytkownika w systemie mikroprocesorowym
 Struktura programu użytkownika w systemie mikroprocesorowym start inicjalizacja niekończaca się pętla zadania niekrytyczne czasowo przerwania zadania krytyczne czasowo 1 Znaczenie problematyki programowania
Struktura programu użytkownika w systemie mikroprocesorowym start inicjalizacja niekończaca się pętla zadania niekrytyczne czasowo przerwania zadania krytyczne czasowo 1 Znaczenie problematyki programowania
Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego
 Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego Dziś bardziej niż kiedykolwiek narzędzia używane przez
Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego Dziś bardziej niż kiedykolwiek narzędzia używane przez
Systemy operacyjne. Systemy operacyjne. Systemy operacyjne. Zadania systemu operacyjnego. Abstrakcyjne składniki systemu. System komputerowy
 Systemy operacyjne Systemy operacyjne Dr inż. Ignacy Pardyka Literatura Siberschatz A. i inn. Podstawy systemów operacyjnych, WNT, Warszawa Skorupski A. Podstawy budowy i działania komputerów, WKiŁ, Warszawa
Systemy operacyjne Systemy operacyjne Dr inż. Ignacy Pardyka Literatura Siberschatz A. i inn. Podstawy systemów operacyjnych, WNT, Warszawa Skorupski A. Podstawy budowy i działania komputerów, WKiŁ, Warszawa
Tom 6 Opis oprogramowania
 Część 4 Narzędzie do wyliczania wielkości oraz wartości parametrów stanu Diagnostyka stanu nawierzchni - DSN Generalna Dyrekcja Dróg Krajowych i Autostrad Warszawa, 30 maja 2012 Historia dokumentu Nazwa
Część 4 Narzędzie do wyliczania wielkości oraz wartości parametrów stanu Diagnostyka stanu nawierzchni - DSN Generalna Dyrekcja Dróg Krajowych i Autostrad Warszawa, 30 maja 2012 Historia dokumentu Nazwa
Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej
 Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Instrukcja do zajęć laboratoryjnych z przedmiotu: Przetwarzanie Sygnałów Kod: TS1A400027 Temat ćwiczenia:
Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Instrukcja do zajęć laboratoryjnych z przedmiotu: Przetwarzanie Sygnałów Kod: TS1A400027 Temat ćwiczenia:
1.1. Wymogi bezpieczeństwa Pomoc techniczna TIA Portal V13 instalacja i konfiguracja pakietu...18
 3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
MiniModbus 4DO. Moduł rozszerzający 4 wyjścia cyfrowe. Wyprodukowano dla. Instrukcja użytkownika
 Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Politechnika Śląska w Gliwicach Instytut Automatyki 2005/2006
 Bezpośrednia akwizycja zmiennych ze sterownika PLC do bazy danych Politechnika Śląska w Gliwicach Instytut Automatyki 2005/2006 Promotor: Autor: dr inż. Tomasz Szczygieł Aleksander Piecha Gliwice 27 listopad
Bezpośrednia akwizycja zmiennych ze sterownika PLC do bazy danych Politechnika Śląska w Gliwicach Instytut Automatyki 2005/2006 Promotor: Autor: dr inż. Tomasz Szczygieł Aleksander Piecha Gliwice 27 listopad
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink.
 Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
1. Cel ćwiczenia. Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU.
 1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
U M L. System operacyjny Linux zagnieżdżony w zewnętrznym systemie operacyjnym (Linux)
") http://user-mode-linux.sourceforge.net/ System operacyjny Linux zagnieżdżony w zewnętrznym systemie operacyjnym (Linux) Autor: Jeff Dike Koncepcja powstała w 1999 r. Początkowo jako patch do jądra 2.0
http://user-mode-linux.sourceforge.net/ System operacyjny Linux zagnieżdżony w zewnętrznym systemie operacyjnym (Linux) Autor: Jeff Dike Koncepcja powstała w 1999 r. Początkowo jako patch do jądra 2.0
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
Podstawy programowania sterowników SIMATIC S w języku LAD / Tomasz Gilewski. Legionowo, cop Spis treści
 Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Analiza i projektowanie oprogramowania. Analiza i projektowanie oprogramowania 1/32
 Analiza i projektowanie oprogramowania Analiza i projektowanie oprogramowania 1/32 Analiza i projektowanie oprogramowania 2/32 Cel analizy Celem fazy określania wymagań jest udzielenie odpowiedzi na pytanie:
Analiza i projektowanie oprogramowania Analiza i projektowanie oprogramowania 1/32 Analiza i projektowanie oprogramowania 2/32 Cel analizy Celem fazy określania wymagań jest udzielenie odpowiedzi na pytanie: