Politechnika Śląska. Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki. Praca dyplomowa inżynierska. Wydział Mechaniczny Technologiczny
|
|
|
- Bogdan Matysiak
- 8 lat temu
- Przeglądów:
Transkrypt
1 Politechnika Śląska Wydział Mechaniczny Technologiczny Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki Praca dyplomowa inżynierska

2 Temat pracy Symulacja komputerowa działania hamulca tarczowego na przykładzie układu hamowania w rowerze

3 Prezentowana praca składa się z trzech zasadniczych części. Należy do nich kolejno: 1) przegląd literatury związanej z tematem; 2) wykonanie modelu CAD tarczowego układu hamowania w rowerze; 3) przygotowanie symulacji komputerowej i opis wyników badań tegoż hamulca.
 przygotowanie symulacji komputerowej i opis wyników")
4 1. Część teoretyczna
5 Hamulce są to urządzenia służące do zatrzymywania układu napędowego, utrzymywania go w stałym położeniu lub regulacji prędkości. Natomiast układ hamulcowy pojazdu służy do zmniejszenia prędkości jazdy oraz do zatrzymania go w określonym miejscu.

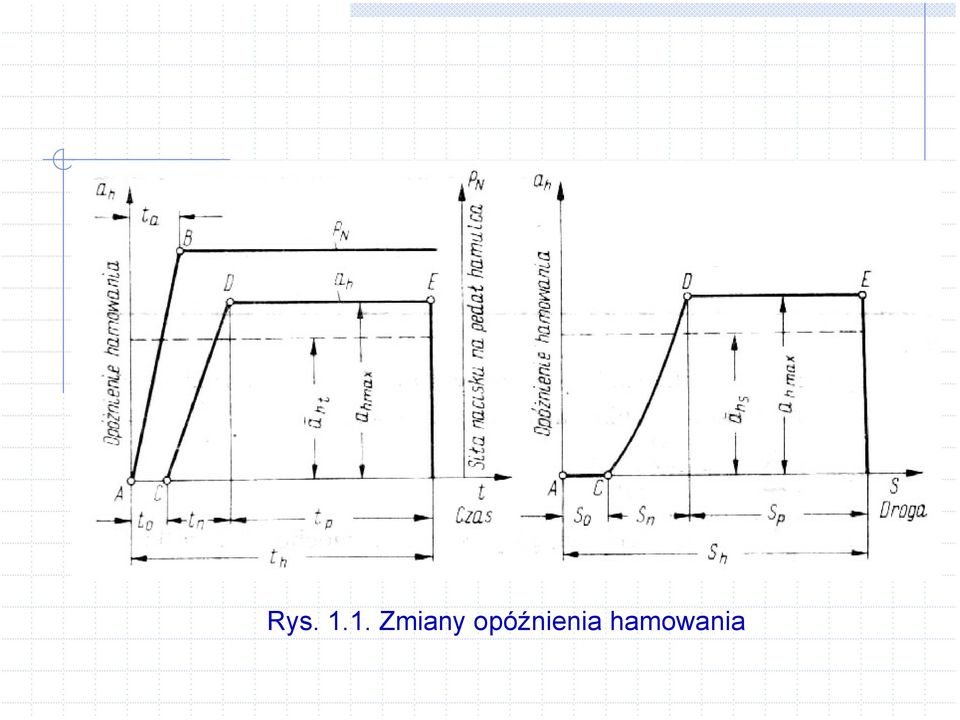
6 Chwilowe opóźnienie hamowania, czyli zmniejszenie prędkości pojazdu w jednostce czasu, jest zmienne i zależy od siły hamowania oraz od rodzaju i stanu nawierzchni jezdni.

7 Rys Zmiany opóźnienia hamowania
8 W pracy przedstawiono trzy odmiany hamulców. Były nimi: - hamulce stosowane w budowie maszyn, - hamulce samochodów osobowych (tarczowe i bębnowe), - hamulce rowerowe.

9 Hamulce rowerowe Rodzajami systemów hamulców rowerowych są hamulce: a) szczękowe, b) tarczowe, c) bębnowe (rzadko stosowane).
 bębnowe (rzadko")
10 Wśród szczękowych rozróżniamy hamulce typu: - U-breake Rys Hamulec typu BMX-owskiego

11 -cantilever Rys Hamulec typu cantilever

12 -V-brake Rys Hamulec typu V-break e

13 Natomiast wśród tarczowych wyróżniamy hamulce: - tarczowe mechaniczne, - tarczowe hydrauliczne.

14 Poszczególne części hamulców tarczowych: Rys Części hamulców tarczowych

15 Na proces hamowania największy wpływ ma zjawisko tarcia.

16 W chwili wytwarzania momentu hamowania powstaje ilość energii tarcia, równa ilości pochłanianej energii kinetycznej pojazdu. Równanie, pozwalające na jej obliczenie, przedstawia się następująco: energia = 0,5 * masa pojazdu * prędkość pojazdu 2 Energia ta zależy więc od kwadratu prędkości pojazdu, a tylko liniowo od masy.

17 2. Tworzenie modelu
18 Modelowanie jest to kompromis zgodności pomiędzy rzeczywistością, a prostotą wykonania. W naszym przypadku modelowanym obiektem był rowerowy hamulec tarczowy, który dla lepszego zobrazowania i zilustrowania powstał wraz z przednią połową roweru MTB. Do tego celu zostało wykorzystane środowisko programu CATIA V5R10.

19 Prezentowany model składa się z ponad czterdziestu elementów. Tworzenie każdej części, a jest ich w sumie dwadzieścia jeden, odbywało się w module Part Design. Niektóre z nich przedstawiają zrzuty ekranu zawarte na kolejnym slajdzie.

20 Rys Felga Rys Widełki Rys Klocek hamulcowy Rys Tarcza hamulcowa

21 Następnie poszczególne elementy były łączone ze sobą w odpowiednie podzespoły. Odbywało się to w ten sposób, że po wczytaniu właściwych części, nadano im odpowiednie więzy tzn. położenia i odległości. W ten sposób powstało siedem podzespołów, z których kilka pokazano na rysunkach (na następnym slajdzie).
22 Rys Rama Rys Zespół koła Rys Obudowa hamulca Rys Zespół piasty
23 Kolejnym zadaniem było zestawienie wszystkich podzespołów w jedną całość będącą gotowym modelem roweru. Pomiędzy wczytanymi zestawieniami także trzeba było zastosować właściwe więzy, aby rower nabrał odpowiednich kształtów i proporcji (rys 2.9).
24 Rys Gotowy model roweru
25 3. Symulacja komputerowa
26 Przygotowanie symulacji Do przeprowadzenia symulacji komputerowej przebiegu hamowania użyto programu MSC Visual Nastran 4D. Dla potrzeb Visual Nastran a stworzono w CATII plik z gotowym modelem, ale z rozszerzeniem.stp. Plik ten następnie otwarto w docelowym programie. Następnie po przetworzeniu zapisano go jako dokument Visual Nasran -.wm3.
27 Nowo przetworzony model roweru (rysunek na następnym slajdzie) ma zachowany kształt i wymiary jednak pod względem kinematycznym nie spełnia żadnych wymagań. Aby poszczególne części wypełniały swoją rolę należy nadać im odpowiednie więzy tzn. relacje pomiędzy poszczególnymi częściami.
28 Rys Rower przygotowany do symulacji Rys Przetworzony model roweru
29 Wśród ważniejszych więzów należy wymienić: - umieszczenie pomiędzy nieruchoma osią, a piastą silnika, który nadał na koło moment obrotowy (na rysunku 2.12 silnik widoczny jako zielona bryła).
30 Rys Koło z nadanym silnikiem
31 - nadanie klockom hamulcowym więzów ruchu wzdłużnego wobec odpowiedniej obudowy hamulca i przyłożenie do nich siłowników, które miały za zadanie wprowadzać je w ruch oraz dociskać do tarczy hamulcowej (rys. 2.13).
32 Rys Siłowniki klocków hamulcowych
33 - a także nadanie kolizji pomiędzy tymi elementami (klocek i tarcza hamulcowa) w celu zetknięcia całej powierzchni roboczej klocka z tarczą. Właśnie dzięki temu zachodzi proces hamowania, więc w tym miejscu można było przejść do przeprowadzenia symulacji.
34
35 Wyniki symulacji Badanie pierwsze obrazuje wpływ zmiany współczynnika tarcia na przebieg procesu hamowania. W tym celu dobrano parametry siłownika tak, aby działał on - przez cały czas trwania symulacji - ze stałą, niezmienną siłą. Natomiast zmianie ulegał tylko współczynnik tarcia pomiędzy poszczególnymi klockami i tarczą hamulcową. Prędkość koła roweru na początku hamowania wynosiła 10 km/h i zmieniała się w czasie.
36 a) współczynnik tarcia µ = 0,18 (co odpowiada tarciu stali po stali bez smarowania),
37 b) współczynnik tarcia µ = 0,35 (okładziny organiczne),
38 c) współczynnik tarcia µ = 0,7 (okładziny ze spieków metalicznych).
39 Podczas badania drugiego obserwujemy natomiast zmiany prędkości hamowanego koła, będące skutkiem działania siłownika o zmiennym charakterze narastania siły. Siła ta, rośnie liniowo w miarę upływu czasu (od zera), co odpowiada równomiernemu naciskaniu na manetkę hamulca z coraz większą siłą. We wszystkich próbach, pomiędzy poszczególnymi klockami i tarczą hamulcową, występuje ten sam współczynnik tarcia o wartości µ = 0,35.
40 a) siła narasta z prędkością 2 N/s,
41 b) siła narasta z prędkością 10 N/s,
42 c) siła narasta z prędkością 50 N/s.
43 D z i ę k u j ę.
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
CENNIK USŁUG PRZEGLĄD STANDARDOWY 90 PLN * regulacja przerzutek i hamulców, kasowanie luzów, kontrola połączeń śruba nakrętka,
 CENNIK USŁUG PRZEGLĄD STANDARDOWY 90 PLN regulacja przerzutek i hamulców, kasowanie luzów, kontrola połączeń śruba - nakrętka, smarowanie łańcucha, kontrola ciśnienia w oponach PRZEGLĄD ROZSZERZONY 180
CENNIK USŁUG PRZEGLĄD STANDARDOWY 90 PLN regulacja przerzutek i hamulców, kasowanie luzów, kontrola połączeń śruba - nakrętka, smarowanie łańcucha, kontrola ciśnienia w oponach PRZEGLĄD ROZSZERZONY 180
13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO
 13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO 13.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP
13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO 13.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP
MODELOWANIE HAMULCA TARCZOWEGO SAMOCHODU OSOBOWEGO Z WYKORZYSTANIEM ZINTEGROWANYCH SYSTEMÓW KOMPUTEROWYCH CAD/CAE
 Marta KORDOWSKA, Zbigniew BUDNIAK, Wojciech MUSIAŁ MODELOWANIE HAMULCA TARCZOWEGO SAMOCHODU OSOBOWEGO Z WYKORZYSTANIEM ZINTEGROWANYCH SYSTEMÓW KOMPUTEROWYCH CAD/CAE Streszczenie W artykule omówiona została
Marta KORDOWSKA, Zbigniew BUDNIAK, Wojciech MUSIAŁ MODELOWANIE HAMULCA TARCZOWEGO SAMOCHODU OSOBOWEGO Z WYKORZYSTANIEM ZINTEGROWANYCH SYSTEMÓW KOMPUTEROWYCH CAD/CAE Streszczenie W artykule omówiona została
Zakład Dydaktyki Fizyki UMK
 Toruński poręcznik do fizyki I. Mechanika Materiały dydaktyczne Krysztof Rochowicz Zadania przykładowe Dr Krzysztof Rochowicz Zakład Dydaktyki Fizyki UMK Toruń, czerwiec 2012 1. Samochód jadący z prędkością
Toruński poręcznik do fizyki I. Mechanika Materiały dydaktyczne Krysztof Rochowicz Zadania przykładowe Dr Krzysztof Rochowicz Zakład Dydaktyki Fizyki UMK Toruń, czerwiec 2012 1. Samochód jadący z prędkością
WZORU UŻYTKOWEGO PL Y1 B62K 5/04 ( ) Białoń Leszek, Nowy Sącz, PL BUP 22/07. Leszek Białoń, Nowy Sącz, PL
 Białoń Leszek, Nowy Sącz, PL BUP 22/07. Leszek Białoń, Nowy Sącz, PL") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116072 (22) Data zgłoszenia: 19.04.2006 (19) PL (11) 64106 (13) Y1 (51) Int.Cl.
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116072 (22) Data zgłoszenia: 19.04.2006 (19) PL (11) 64106 (13) Y1 (51) Int.Cl.
BADANIA SYMULACYJNE PROCESU HAMOWANIA SAMOCHODU OSOBOWEGO W PROGRAMIE PC-CRASH
 BADANIA SYMULACYJNE PROCESU HAMOWANIA SAMOCHODU OSOBOWEGO W PROGRAMIE PC-CRASH Dr inż. Artur JAWORSKI, Dr inż. Hubert KUSZEWSKI, Dr inż. Adam USTRZYCKI W artykule przedstawiono wyniki analizy symulacyjnej
BADANIA SYMULACYJNE PROCESU HAMOWANIA SAMOCHODU OSOBOWEGO W PROGRAMIE PC-CRASH Dr inż. Artur JAWORSKI, Dr inż. Hubert KUSZEWSKI, Dr inż. Adam USTRZYCKI W artykule przedstawiono wyniki analizy symulacyjnej
Ćwiczenie 1b. Silnik prądu stałego jako element wykonawczy Modelowanie i symulacja napędu CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej
 Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
v 6 i 7 j. Wyznacz wektora momentu pędu czaski względem początku układu współrzędnych.
 Dynamika bryły sztywnej.. Moment siły. Moment pędu. Moment bezwładności. 171. Na cząstkę o masie kg znajdującą się w punkcie określonym wektorem r 5i 7j działa siła F 3i 4j. Wyznacz wektora momentu tej
Dynamika bryły sztywnej.. Moment siły. Moment pędu. Moment bezwładności. 171. Na cząstkę o masie kg znajdującą się w punkcie określonym wektorem r 5i 7j działa siła F 3i 4j. Wyznacz wektora momentu tej
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, Spis treści
 Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
Pojazdy samochodowe - opis przedmiotu
 Pojazdy samochodowe - opis przedmiotu Informacje ogólne Nazwa przedmiotu Pojazdy samochodowe Kod przedmiotu 06.1-WM-MiBM-KiEP-D-01_15W_pNadGenE5EFV Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Pojazdy samochodowe - opis przedmiotu Informacje ogólne Nazwa przedmiotu Pojazdy samochodowe Kod przedmiotu 06.1-WM-MiBM-KiEP-D-01_15W_pNadGenE5EFV Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Analiza mechanizmu korbowo-suwakowego
 Cel ćwiczenia: Metody modelowania i symulacji kinematyki i dynamiki z wykorzystaniem CAD/CAE Laboratorium I Analiza mechanizmu korbowo-suwakowego Celem ćwiczenia jest zapoznanie ze środowiskiem symulacji
Cel ćwiczenia: Metody modelowania i symulacji kinematyki i dynamiki z wykorzystaniem CAD/CAE Laboratorium I Analiza mechanizmu korbowo-suwakowego Celem ćwiczenia jest zapoznanie ze środowiskiem symulacji
Bryła sztywna Zadanie domowe
 Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
WYZNACZANIE NIEPEWNOŚCI OBLICZEŃ W PRZYPADKU MODELI NIELINIOWO ZALEŻNYCH OD PARAMETRÓW
 WYZNACZANIE NIEPEWNOŚCI OBLICZEŃ W PRZYPADKU MODELI NIELINIOWO ZALEŻNYCH OD PARAMETRÓW TOMASZ PUSTY 1, JERZY WICHER 2 Automotive Industry Institute (PIMOT) Streszczenie W artykule podjęto problem określenia
WYZNACZANIE NIEPEWNOŚCI OBLICZEŃ W PRZYPADKU MODELI NIELINIOWO ZALEŻNYCH OD PARAMETRÓW TOMASZ PUSTY 1, JERZY WICHER 2 Automotive Industry Institute (PIMOT) Streszczenie W artykule podjęto problem określenia
WYZNACZENIE WSPÓŁCZYNNIKA OPORU TOCZENIA I WSPÓŁCZYNNIKA OPORU POWIETRZA
 Cel ćwiczenia WYZNACZENIE WSPÓŁCZYNNIKA OPORU TOCZENIA I WSPÓŁCZYNNIKA OPORU POWIETRZA Celem cwiczenia jest wyznaczenie współczynników oporu powietrza c x i oporu toczenia f samochodu metodą wybiegu. Wprowadzenie
Cel ćwiczenia WYZNACZENIE WSPÓŁCZYNNIKA OPORU TOCZENIA I WSPÓŁCZYNNIKA OPORU POWIETRZA Celem cwiczenia jest wyznaczenie współczynników oporu powietrza c x i oporu toczenia f samochodu metodą wybiegu. Wprowadzenie
CENNIK USŁUG. PRZEGLĄD STANDARDOWY 90 PLN * diagnoza stanu technicznego roweru, regulacja przerzutek i hamulców, kasowanie luzów,
 CENNIK USŁUG PRZEGLĄD STANDARDOWY 90 PLN diagnoza stanu technicznego roweru, regulacja przerzutek i hamulców, kasowanie luzów, kontrola połączeń śruba - nakrętka, smarowanie łańcucha, kontrola ciśnienia
CENNIK USŁUG PRZEGLĄD STANDARDOWY 90 PLN diagnoza stanu technicznego roweru, regulacja przerzutek i hamulców, kasowanie luzów, kontrola połączeń śruba - nakrętka, smarowanie łańcucha, kontrola ciśnienia
SYSTEMY SYSTEM KONTR OLI TRAKCJI OLI ukła uk dy dy be zpiec zeńs zpiec zeńs a tw czyn czyn
 SYSTEMY KONTROLI TRAKCJI układy bezpieczeństwa czynnego Gdańsk 2009 Układy hamulcowe w samochodach osobowych 1. Roboczy (zasadniczy) układ hamulcowy cztery koła, dwuobwodowy (pięć typów: II, X, HI, LL,
SYSTEMY KONTROLI TRAKCJI układy bezpieczeństwa czynnego Gdańsk 2009 Układy hamulcowe w samochodach osobowych 1. Roboczy (zasadniczy) układ hamulcowy cztery koła, dwuobwodowy (pięć typów: II, X, HI, LL,
Szczegółowe Dane Techniczne Szkieletu Głównego kalorymetru elektromagnetycznego HADES ECAL
 Projekt, wykonanie oraz montaż szkieletu głównego kalorymetru elektromagnetycznego (HADES ECAL) dla eksperymentu HADES w Ośrodku Badań z Wiązkami Jonów oraz Antyprotonów FAIR w Darmstadt (Niemcy) Przedmiotem
Projekt, wykonanie oraz montaż szkieletu głównego kalorymetru elektromagnetycznego (HADES ECAL) dla eksperymentu HADES w Ośrodku Badań z Wiązkami Jonów oraz Antyprotonów FAIR w Darmstadt (Niemcy) Przedmiotem
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223141 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223141 (13) B1 (21) Numer zgłoszenia: 402276 (51) Int.Cl. B62M 1/14 (2006.01) A61G 5/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223141 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223141 (13) B1 (21) Numer zgłoszenia: 402276 (51) Int.Cl. B62M 1/14 (2006.01) A61G 5/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Ć w i c z e n i e K 4
 Akademia Górniczo Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości, Zmęczenia Materiałów i Konstrukcji Nazwisko i Imię: Nazwisko i Imię: Wydział Górnictwa i Geoinżynierii Grupa
Akademia Górniczo Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości, Zmęczenia Materiałów i Konstrukcji Nazwisko i Imię: Nazwisko i Imię: Wydział Górnictwa i Geoinżynierii Grupa
POMYSŁ TECHNICZNEGO ROZWIĄZANIA PRZENOŚNEGO STOŁU TRENINGOWEGO DO ĆWICZEŃ Z UŻYCIEM INSTRUMENTARIUM ENDOSKOPOWEGO DLA SZEŚCIU OPERATORÓW
 Aktualne Problemy Biomechaniki, nr 6/2012 123 Jakub Słoniewski, Grzegorz Milewski, Zakład Mechaniki Doświadczalnej i Biomechaniki, Politechnika Krakowska, Kraków POMYSŁ TECHNICZNEGO ROZWIĄZANIA PRZENOŚNEGO
Aktualne Problemy Biomechaniki, nr 6/2012 123 Jakub Słoniewski, Grzegorz Milewski, Zakład Mechaniki Doświadczalnej i Biomechaniki, Politechnika Krakowska, Kraków POMYSŁ TECHNICZNEGO ROZWIĄZANIA PRZENOŚNEGO
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu Kierunek Mechanika i Budowa Maszyn Specjalność Samochody i Ciągniki
 POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu Kierunek Mechanika i Budowa Maszyn Specjalność Samochody i Ciągniki Praca magisterska Model dynamiki wzdłuŝnej samochodu w czasie rzeczywistym
POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu Kierunek Mechanika i Budowa Maszyn Specjalność Samochody i Ciągniki Praca magisterska Model dynamiki wzdłuŝnej samochodu w czasie rzeczywistym
Ćwiczenie nr X ANALIZA DRGAŃ SAMOWZBUDNYCH TYPU TARCIOWEGO
 Ćwiczenie nr X ANALIZA DRGAŃ SAMOWZBUDNYCH TYPU TARCIOWEGO Celem ćwiczenia jest zbadanie zachowania układu oscylatora harmonicznego na taśmociągu w programie napisanym w środowisku Matlab, dla następujących
Ćwiczenie nr X ANALIZA DRGAŃ SAMOWZBUDNYCH TYPU TARCIOWEGO Celem ćwiczenia jest zbadanie zachowania układu oscylatora harmonicznego na taśmociągu w programie napisanym w środowisku Matlab, dla następujących
Ćwiczenie: "Kinematyka"
 Ćwiczenie: "Kinematyka" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: 1. Ruch punktu
Ćwiczenie: "Kinematyka" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: 1. Ruch punktu
PRZYRZĄD DO BADANIA RUCHU JEDNOSTAJNEGO l JEDNOSTANIE ZMIENNEGO V 5-143
 Przyrząd do badania ruchu jednostajnego i jednostajnie zmiennego V 5-43 PRZYRZĄD DO BADANIA RUCHU JEDNOSTAJNEGO l JEDNOSTANIE ZMIENNEGO V 5-43 Oprac. FzA, IF US, 2007 Rys. Przyrząd stanowi równia pochyła,
Przyrząd do badania ruchu jednostajnego i jednostajnie zmiennego V 5-43 PRZYRZĄD DO BADANIA RUCHU JEDNOSTAJNEGO l JEDNOSTANIE ZMIENNEGO V 5-43 Oprac. FzA, IF US, 2007 Rys. Przyrząd stanowi równia pochyła,
KARTY POMIAROWE DO BADAŃ DROGOWYCH
 Katedra Pojazdów i Sprzętu Mechanicznego Laboratorium KARTY POMIAROWE DO BADAŃ DROGOWYCH Zawartość 5 kart pomiarowych Kielce 00 Opracował : dr inż. Rafał Jurecki str. Strona / Silnik Charakterystyka obiektu
Katedra Pojazdów i Sprzętu Mechanicznego Laboratorium KARTY POMIAROWE DO BADAŃ DROGOWYCH Zawartość 5 kart pomiarowych Kielce 00 Opracował : dr inż. Rafał Jurecki str. Strona / Silnik Charakterystyka obiektu
PL B1. Układ przeniesienia napędu do hybrydowych pojazdów roboczych dużej mocy zwłaszcza wózków widłowych o dużym udźwigu
 PL 219224 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219224 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 394214 (22) Data zgłoszenia: 15.03.2011 (51) Int.Cl.
PL 219224 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219224 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 394214 (22) Data zgłoszenia: 15.03.2011 (51) Int.Cl.
(21) Numer zgłoszenia: (54) Sposób stanowiskowej kontroli działania hamulców pojazdów samochodowych
 Numer zgłoszenia: (54) Sposób stanowiskowej kontroli działania hamulców pojazdów samochodowych") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 167370 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 293910 (22) Data zgłoszenia: 18.03.1992 (51) IntCl6: G 01L 5/28 G01M
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 167370 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 293910 (22) Data zgłoszenia: 18.03.1992 (51) IntCl6: G 01L 5/28 G01M
Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej
 Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej Dynamika ruchu postępowego 1. Balon opada ze stałą prędkością. Jaką masę balastu należy wyrzucić, aby balon
Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej Dynamika ruchu postępowego 1. Balon opada ze stałą prędkością. Jaką masę balastu należy wyrzucić, aby balon
Hamulce elektromagnetyczne. EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie
 Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
12 RUCH OBROTOWY BRYŁY SZTYWNEJ I. a=εr. 2 t. Włodzimierz Wolczyński. Przyspieszenie kątowe. ε przyspieszenie kątowe [ ω prędkość kątowa
 Włodzimierz Wolczyński Przyspieszenie kątowe 1 RUCH OROTOWY RYŁY SZTYWNEJ I = = ε przyspieszenie kątowe [ ] ω prędkość kątowa = = T okres, = - częstotliwość s=αr v=ωr a=εr droga = kąt x promień prędkość
Włodzimierz Wolczyński Przyspieszenie kątowe 1 RUCH OROTOWY RYŁY SZTYWNEJ I = = ε przyspieszenie kątowe [ ] ω prędkość kątowa = = T okres, = - częstotliwość s=αr v=ωr a=εr droga = kąt x promień prędkość
Sprzęgła. Układ napędowy - sprzęgła. Prezentacja zastrzeżona prawem autorskim kopiowanie w części lub całości tylko za zgodą autora
 Sprzęgła Prezentacja zastrzeżona prawem autorskim kopiowanie w części lub całości tylko za zgodą autora opracowanie mgr inż. Ireneusz Kulczyk Zespół Szkół Samochodowych w Bydgoszczy - 2009 Sprzęgło jest
Sprzęgła Prezentacja zastrzeżona prawem autorskim kopiowanie w części lub całości tylko za zgodą autora opracowanie mgr inż. Ireneusz Kulczyk Zespół Szkół Samochodowych w Bydgoszczy - 2009 Sprzęgło jest
SPRZEDAJEMY!!!!!! Star 200 STRAŻ POŻARNA!!!!, rok 1988 OPINIA RZECZOZNAWCY. LInk do OTOMOTO ;} Dane techniczne. Rok produkcji:
 SPRZEDAJEMY!!!!!! Star 200 STRAŻ POŻARNA!!!!, rok 1988 LInk do OTOMOTO ;} OPINIA RZECZOZNAWCY. Dane techniczne Rok produkcji: 1988 Wskaż, licznika: 19621 km 1 / 7 Nr rejestracyjny: KPC 6346 Marka, typ
SPRZEDAJEMY!!!!!! Star 200 STRAŻ POŻARNA!!!!, rok 1988 LInk do OTOMOTO ;} OPINIA RZECZOZNAWCY. Dane techniczne Rok produkcji: 1988 Wskaż, licznika: 19621 km 1 / 7 Nr rejestracyjny: KPC 6346 Marka, typ
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW
 MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW ADAM GOŁASZEWSKI 1, TOMASZ SZYDŁOWSKI 2 Politechnika Łódzka Streszczenie Badania dynamiki ruchu pojazdów wpływają w istotny sposób na rozwój ogólnie rozumianej
MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW ADAM GOŁASZEWSKI 1, TOMASZ SZYDŁOWSKI 2 Politechnika Łódzka Streszczenie Badania dynamiki ruchu pojazdów wpływają w istotny sposób na rozwój ogólnie rozumianej
R o z d z i a ł 4 MECHANIKA CIAŁA SZTYWNEGO
 R o z d z i a ł 4 MECHANIKA CIAŁA SZTYWNEGO 4.1. Bryła sztywna W dotychczasowych rozważaniach traktowaliśmy wszystkie otaczające nas ciała jako punkty materialne lub zbiory punktów materialnych. Jest to
R o z d z i a ł 4 MECHANIKA CIAŁA SZTYWNEGO 4.1. Bryła sztywna W dotychczasowych rozważaniach traktowaliśmy wszystkie otaczające nas ciała jako punkty materialne lub zbiory punktów materialnych. Jest to
Czy w przyczepach do podwózki potrzebne są hamulce?
 Czy w przyczepach do podwózki potrzebne są hamulce? Producent, Dealer: "TAK" - bezpieczeństwo - obowiązujące przepisy Kupujący "TO ZALEŻY" - cena O jakich kosztach mówimy Wartość dopłaty do hamulaców w
Czy w przyczepach do podwózki potrzebne są hamulce? Producent, Dealer: "TAK" - bezpieczeństwo - obowiązujące przepisy Kupujący "TO ZALEŻY" - cena O jakich kosztach mówimy Wartość dopłaty do hamulaców w
NPR85 P Série Bleu
 3.0 Série Bleu - 7,5 t NPR85 3.0 Série Bleu Wymiary oraz zalecane rozmiary tylnej zabudowy P75 H P75 K P75 M Wymiary (mm) Rozstaw osi X 3365 3815 4475 D min. 650 Długość całkowita K 6040 6690 7870 Zwis
3.0 Série Bleu - 7,5 t NPR85 3.0 Série Bleu Wymiary oraz zalecane rozmiary tylnej zabudowy P75 H P75 K P75 M Wymiary (mm) Rozstaw osi X 3365 3815 4475 D min. 650 Długość całkowita K 6040 6690 7870 Zwis
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO
 TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
Podczas wykonywania analizy w programie COMSOL, wykorzystywane jest poniższe równanie: 1.2. Dane wejściowe.
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Mechanika i Budowa Maszyn Grupa M3 Metoda Elementów Skończonych Prowadzący: dr hab. Tomasz Stręk, prof. nadzw. Wykonali: Marcin Rybiński Grzegorz
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Mechanika i Budowa Maszyn Grupa M3 Metoda Elementów Skończonych Prowadzący: dr hab. Tomasz Stręk, prof. nadzw. Wykonali: Marcin Rybiński Grzegorz
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
Tematy zadań do rozwiązania przy użyciu modułu symulacji dynamicznej programu Autodesk Inventor
 Tematy zadań do rozwiązania przy użyciu modułu symulacji dynamicznej programu Autodesk Inventor (na podstawie J.Giergiel, L.Głuch, A.Łopata: Zbiór zadań z mechaniki.wydawnictwo AGH, Kraków 2011r.) Temat
Tematy zadań do rozwiązania przy użyciu modułu symulacji dynamicznej programu Autodesk Inventor (na podstawie J.Giergiel, L.Głuch, A.Łopata: Zbiór zadań z mechaniki.wydawnictwo AGH, Kraków 2011r.) Temat
Układ kierowniczy. Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek:
 1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu
 POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu PRACA DYPLOMOWA BADANIA I MODELOWANIE PRACY UKŁADU NAPĘDOWEGO SAMOCHODU Z AUTOMATYCZNĄ SKRZYNIĄ BIEGÓW Autor: inŝ. Janusz Walkowiak Promotor:
POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu PRACA DYPLOMOWA BADANIA I MODELOWANIE PRACY UKŁADU NAPĘDOWEGO SAMOCHODU Z AUTOMATYCZNĄ SKRZYNIĄ BIEGÓW Autor: inŝ. Janusz Walkowiak Promotor:
Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc.
 Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc. ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przypuśćmy, że wszyscy ludzie na świecie zgromadzili się w jednym miejscu na Ziemi i na daną komendę jednocześnie
Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc. ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przypuśćmy, że wszyscy ludzie na świecie zgromadzili się w jednym miejscu na Ziemi i na daną komendę jednocześnie
Numery identyfikacyjne i zakup części zamiennych Bezpieczeństwo przede wszystkim! Sprawdzenie skutera przed jazdą Rozdział 1 Obsługa codzienna
 Podziękowania 8 O poradniku 9 Numery identyfikacyjne i zakup części zamiennych 9 Bezpieczeństwo przede wszystkim! 10 Sprawdzenie skutera przed jazdą 11 Sprawdzanie poziomu oleju silniki dwusuwowe 11 Sprawdzanie
Podziękowania 8 O poradniku 9 Numery identyfikacyjne i zakup części zamiennych 9 Bezpieczeństwo przede wszystkim! 10 Sprawdzenie skutera przed jazdą 11 Sprawdzanie poziomu oleju silniki dwusuwowe 11 Sprawdzanie
LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA I NAPRAWA ELEMENTÓW UKŁADU NAPĘDOWEGO
 LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA I NAPRAWA ELEMENTÓW UKŁADU NAPĘDOWEGO 2 1. Cel ćwiczenia: Dokonać weryfikacji elementów przeniesienia napędu oraz pojazdu. W wyniku opanowania treści ćwiczenia
LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA I NAPRAWA ELEMENTÓW UKŁADU NAPĘDOWEGO 2 1. Cel ćwiczenia: Dokonać weryfikacji elementów przeniesienia napędu oraz pojazdu. W wyniku opanowania treści ćwiczenia
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie
 ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZACHODNIOPOM UNIWERSY T E T T E CH OR NO SKI LOGICZNY Instrukcja do ćwiczeń laboratoryjnych z metody
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZACHODNIOPOM UNIWERSY T E T T E CH OR NO SKI LOGICZNY Instrukcja do ćwiczeń laboratoryjnych z metody
Karta (sylabus) modułu/przedmiotu [Mechanika i Budowa Maszyn] Studia I stopnia. Budowa samochodów i ciągników Rodzaj przedmiotu: Język polski
![Karta (sylabus) modułu/przedmiotu [Mechanika i Budowa Maszyn] Studia I stopnia. Budowa samochodów i ciągników Rodzaj przedmiotu: Język polski](/thumbs/57/40027034.jpg "Karta (sylabus) modułu/przedmiotu [Mechanika i Budowa Maszyn] Studia I stopnia. Budowa samochodów i ciągników Rodzaj przedmiotu: Język polski") Karta (sylabus) modułu/przedmiotu [Mechanika i Budowa Maszyn] Studia I stopnia Przedmiot: Budowa samochodów i ciągników Rodzaj przedmiotu: Obieralny Kod przedmiotu: MBM N 0 8-2 _0 Rok: III Semestr: V Forma
Karta (sylabus) modułu/przedmiotu [Mechanika i Budowa Maszyn] Studia I stopnia Przedmiot: Budowa samochodów i ciągników Rodzaj przedmiotu: Obieralny Kod przedmiotu: MBM N 0 8-2 _0 Rok: III Semestr: V Forma
Obliczenia obciążenia osi. Informacje ogólne na temat obliczeń obciążenia osi
 Informacje ogólne na temat obliczeń obciążenia osi Każdy rodzaj transportu za pomocą samochodów ciężarowych wymaga, aby podwozie dostarczane z fabryki było wyposażone w pewną formę zabudowy. Informacje
Informacje ogólne na temat obliczeń obciążenia osi Każdy rodzaj transportu za pomocą samochodów ciężarowych wymaga, aby podwozie dostarczane z fabryki było wyposażone w pewną formę zabudowy. Informacje
WIERZBICKI JĘDRZEJ. 4 (ns)
") WIERZBICKI JĘDRZEJ 4 (ns) CZĘŚĆ 1a BELKA 1. Zadanie Przeprowadzić analizę kinematyczną oraz wyznaczyć reakcje w więzach belki, danej schematem przedstawionym na rys. 1. Wymiary oraz obciążenia przyjąć
WIERZBICKI JĘDRZEJ 4 (ns) CZĘŚĆ 1a BELKA 1. Zadanie Przeprowadzić analizę kinematyczną oraz wyznaczyć reakcje w więzach belki, danej schematem przedstawionym na rys. 1. Wymiary oraz obciążenia przyjąć
Spis treści. Wykaz ważniejszych oznaczeń i skrótów 10. Od autorów 13. Wstęp 14. Rozdział 1. Ogólna charakterystyka samochodów użytkowych 17
 Spis treści Wykaz ważniejszych oznaczeń i skrótów 10 Od autorów 13 Wstęp 14 Rozdział 1. Ogólna charakterystyka samochodów użytkowych 17 1.1. Klasyfikacja, przeznaczenie i wymagania stawiane samochodom
Spis treści Wykaz ważniejszych oznaczeń i skrótów 10 Od autorów 13 Wstęp 14 Rozdział 1. Ogólna charakterystyka samochodów użytkowych 17 1.1. Klasyfikacja, przeznaczenie i wymagania stawiane samochodom
Zestaw zadań na I etap konkursu fizycznego. Zad. 1 Kamień spadał swobodnie z wysokości h=20m. Średnia prędkość kamienia wynosiła :
 Zestaw zadań na I etap konkursu fizycznego Zad. 1 Kamień spadał swobodnie z wysokości h=20m. Średnia prędkość kamienia wynosiła : A) 5m/s B) 10m/s C) 20m/s D) 40m/s. Zad.2 Samochód o masie 1 tony poruszał
Zestaw zadań na I etap konkursu fizycznego Zad. 1 Kamień spadał swobodnie z wysokości h=20m. Średnia prędkość kamienia wynosiła : A) 5m/s B) 10m/s C) 20m/s D) 40m/s. Zad.2 Samochód o masie 1 tony poruszał
MODELOWANIE WPŁYWU NIEZALEŻNEGO STEROWANIA KÓŁ LEWYCH I PRAWYCH NA ZACHOWANIE DYNAMICZNE POJAZDU
 Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2016 (111) 73 Karol Tatar, Piotr Chudzik Politechnika Łódzka, Łódź MODELOWANIE WPŁYWU NIEZALEŻNEGO STEROWANIA KÓŁ LEWYCH I PRAWYCH NA ZACHOWANIE DYNAMICZNE
Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2016 (111) 73 Karol Tatar, Piotr Chudzik Politechnika Łódzka, Łódź MODELOWANIE WPŁYWU NIEZALEŻNEGO STEROWANIA KÓŁ LEWYCH I PRAWYCH NA ZACHOWANIE DYNAMICZNE
Warszawa, dnia 7 września 2012 r. Poz. 997 ROZPORZĄDZENIE MINISTRA TRANSPORTU, BUDOWNICTWA I GOSPODARKI MORSKIEJ 1) z dnia 3 sierpnia 2012 r.
 z dnia 3 sierpnia 2012 r.") DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ Warszawa, dnia 7 września 12 r. Poz. 997 ROZPORZĄDZENIE MINISTRA TRANSPORTU, BUDOWNICTWA I GOSPODARKI MORSKIEJ 1) z dnia 3 sierpnia 12 r. zmieniające rozporządzenie
DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ Warszawa, dnia 7 września 12 r. Poz. 997 ROZPORZĄDZENIE MINISTRA TRANSPORTU, BUDOWNICTWA I GOSPODARKI MORSKIEJ 1) z dnia 3 sierpnia 12 r. zmieniające rozporządzenie
Wybieranie ramy pomocniczej i mocowania. Opis. Zalecenia
 Opis Opis Rama, rama pomocnicza i wzmocnienia współpracują z sobą, zapewniając wytrzymałość na wszelkie rodzaje naprężeń mogących powstać w czasie eksploatacji. Wymiary i konstrukcja ramy, mocowania oraz
Opis Opis Rama, rama pomocnicza i wzmocnienia współpracują z sobą, zapewniając wytrzymałość na wszelkie rodzaje naprężeń mogących powstać w czasie eksploatacji. Wymiary i konstrukcja ramy, mocowania oraz
Politechnika Poznańska. Streszczenie
 ZASTOSOWANIE SZYBKIEJ TRANSFORMATY FOURIERA FFT DO SYGNAŁU DRGANIOWEGO GENEROWANEGO PRZEZ HAMULEC TARCZOWY DO OCENY ZUŻYCIA OKŁADZIN CIERNYCH W CZASIE HAMOWANIA NA SPADKU WOJCIECH SAWCZUK 1, FRANCISZEK
ZASTOSOWANIE SZYBKIEJ TRANSFORMATY FOURIERA FFT DO SYGNAŁU DRGANIOWEGO GENEROWANEGO PRZEZ HAMULEC TARCZOWY DO OCENY ZUŻYCIA OKŁADZIN CIERNYCH W CZASIE HAMOWANIA NA SPADKU WOJCIECH SAWCZUK 1, FRANCISZEK
POJAZDY SZYNOWE 2/2014
 ZASTOSOWANIE CHARAKTERYSTYK WIDMOWYCH SYGNAŁU DRGANIOWEGO DO OCENY ZUŻYCIA ELEMENTÓW CIERNYCH KOLEJOWEGO HAMULCA TARCZOWEGO W CZASIE HAMOWAŃ ZATRZYMUJĄCYCH Wojciech Sawczuk 1 1 Politechnika Poznańska,
ZASTOSOWANIE CHARAKTERYSTYK WIDMOWYCH SYGNAŁU DRGANIOWEGO DO OCENY ZUŻYCIA ELEMENTÓW CIERNYCH KOLEJOWEGO HAMULCA TARCZOWEGO W CZASIE HAMOWAŃ ZATRZYMUJĄCYCH Wojciech Sawczuk 1 1 Politechnika Poznańska,
09R POWTÓRKA FIKCYJNY EGZAMIN MATURALNY Z FIZYKI I ASTRONOMII. POZIOM ROZSZERZONY (dynamika ruchu prostoliniowego)
") Włodzimierz Wolczyński 09R POWTÓRKA FIKCYJNY EGZAMIN MATURALNY Z FIZYKI I ASTRONOMII POZIOM ROZSZERZONY (dynamika ruchu prostoliniowego) Rozwiązanie zadań należy zapisać w wyznaczonych miejscach pod treścią
Włodzimierz Wolczyński 09R POWTÓRKA FIKCYJNY EGZAMIN MATURALNY Z FIZYKI I ASTRONOMII POZIOM ROZSZERZONY (dynamika ruchu prostoliniowego) Rozwiązanie zadań należy zapisać w wyznaczonych miejscach pod treścią
Pierwsze dwa podpunkty tego zadania dotyczyły równowagi sił, dla naszych rozważań na temat dynamiki ruchu obrotowego interesujące będzie zadanie 3.3.
 Dynamika ruchu obrotowego Zauważyłem, że zadania dotyczące ruchu obrotowego bardzo często sprawiają maturzystom wiele kłopotów. A przecież wystarczy zrozumieć i stosować zasady dynamiki Newtona. Przeanalizujmy
Dynamika ruchu obrotowego Zauważyłem, że zadania dotyczące ruchu obrotowego bardzo często sprawiają maturzystom wiele kłopotów. A przecież wystarczy zrozumieć i stosować zasady dynamiki Newtona. Przeanalizujmy
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
MECHANIKA 2. Praca, moc, energia. Wykład Nr 11. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
BEZPIECZEŃSTWO TRANSPORTU SAMOCHODOWEGO
 - 1 - POLITECHNIKA ŚWIETOKRZYSKA Katedra Pojazdów Samochodowych i Transportu LABORATORIUM POJAZDÓW SAMOCHODOWYCH I CIĄGNIKÓW BEZPIECZEŃSTWO TRANSPORTU SAMOCHODOWEGO INSTRUKCJA DO ĆWICZENIA 3Bt Pomiary
- 1 - POLITECHNIKA ŚWIETOKRZYSKA Katedra Pojazdów Samochodowych i Transportu LABORATORIUM POJAZDÓW SAMOCHODOWYCH I CIĄGNIKÓW BEZPIECZEŃSTWO TRANSPORTU SAMOCHODOWEGO INSTRUKCJA DO ĆWICZENIA 3Bt Pomiary
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych Kierunek kształcenia w zawodzie: dr inż. Janusz Walkowiak Przedmiot: I semestr Tematyka zajęć Ustalenie numeru identyfikacyjnego i odczytywanie danych z tablicy znamionowej
SZKOŁA POLICEALNA dla dorosłych Kierunek kształcenia w zawodzie: dr inż. Janusz Walkowiak Przedmiot: I semestr Tematyka zajęć Ustalenie numeru identyfikacyjnego i odczytywanie danych z tablicy znamionowej
Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu.
 PRZYKŁAD C5 Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu. W charakterze przykładu rozpatrzmy model silnika klatkowego, którego parametry są następujące: Moc znamionowa
PRZYKŁAD C5 Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu. W charakterze przykładu rozpatrzmy model silnika klatkowego, którego parametry są następujące: Moc znamionowa
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
Badanie wytrzymałości elementu betonowego metodą sklerometryczną
 Badanie wytrzymałości elementu betonowego metodą sklerometryczną 1. Badania nieniszczące wprowadzenie Przy określaniu wytrzymałości wykonanego z betonu elementu nie zawsze można się oprzeć na wynikach
Badanie wytrzymałości elementu betonowego metodą sklerometryczną 1. Badania nieniszczące wprowadzenie Przy określaniu wytrzymałości wykonanego z betonu elementu nie zawsze można się oprzeć na wynikach
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2019 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2019 Nazwa kwalifikacji: Organizacja i nadzorowanie procesów produkcji maszyn i urządzeń Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2019 Nazwa kwalifikacji: Organizacja i nadzorowanie procesów produkcji maszyn i urządzeń Oznaczenie kwalifikacji:
Zasady dynamiki Newtona
 Zasady dynamiki Newtona 1. Znajdź masę ciała (poruszającego się po prostej), które pod działaniem siły o wartości F = 30 N w czasie t= 5s zmienia swą szybkość z v 1 = 15 m/s na v 2 = 30 m/s. 2. Znajdź
Zasady dynamiki Newtona 1. Znajdź masę ciała (poruszającego się po prostej), które pod działaniem siły o wartości F = 30 N w czasie t= 5s zmienia swą szybkość z v 1 = 15 m/s na v 2 = 30 m/s. 2. Znajdź
Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia. Podstawy budowy pojazdów Obowiązkowy/kierunkowy. Język polski
 modułu/przedmiotu Transport Studia I stopnia. Podstawy budowy pojazdów Obowiązkowy/kierunkowy. Język polski") Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia Przedmiot: Podstawy budowy pojazdów Rodzaj przedmiotu: Obowiązkowy/kierunkowy Kod przedmiotu: TR S 0 3 38-0_ Rok: II Semestr: 3 Forma studiów:
Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia Przedmiot: Podstawy budowy pojazdów Rodzaj przedmiotu: Obowiązkowy/kierunkowy Kod przedmiotu: TR S 0 3 38-0_ Rok: II Semestr: 3 Forma studiów:
W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ
 POLITECHNIKA BIAŁOSTOCKA Wydział Budownictwa i Inżynierii Środowiska Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: POWIERZCHNIA SWOBODNA CIECZY W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ Ćwiczenie
POLITECHNIKA BIAŁOSTOCKA Wydział Budownictwa i Inżynierii Środowiska Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: POWIERZCHNIA SWOBODNA CIECZY W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ Ćwiczenie
CELOWOŚĆ WYKORZYSTANIA I PROBLEMATYKA STEROWANIA HAMULCA CIERNEGO NA STANOWISKU DO SYMULACJI ODTWARZAJĄCEJ DYNAMIKI UKŁADU NAPĘDOWEGO
 CELOWOŚĆ WYKORZYSTANIA I PROBLEMATYKA STEROWANIA HAMULCA CIERNEGO NA STANOWISKU DO SYMULACJI ODTWARZAJĄCEJ DYNAMIKI UKŁADU NAPĘDOWEGO GRZEGORZ ŚLASKI 1 Politechnika Poznańska Streszczenie W artykule została
CELOWOŚĆ WYKORZYSTANIA I PROBLEMATYKA STEROWANIA HAMULCA CIERNEGO NA STANOWISKU DO SYMULACJI ODTWARZAJĄCEJ DYNAMIKI UKŁADU NAPĘDOWEGO GRZEGORZ ŚLASKI 1 Politechnika Poznańska Streszczenie W artykule została
Rys 1 Schemat modelu masa- sprężyna- tłumik
 Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Badanie przebiegu włączania sprzęgła ciernego
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY KONSTRUKCJI MASZYN II Temat ćwiczenia: Badanie przebiegu włączania
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY KONSTRUKCJI MASZYN II Temat ćwiczenia: Badanie przebiegu włączania
Politechnika Poznańska
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Mechanika i Budowa Maszyn Grupa M3 Metoda Elementów Skończonych Prowadzący: dr hab. Tomasz Stręk, prof. nadzw. Wykonał: Miłek Mateusz 1 2 Spis
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Mechanika i Budowa Maszyn Grupa M3 Metoda Elementów Skończonych Prowadzący: dr hab. Tomasz Stręk, prof. nadzw. Wykonał: Miłek Mateusz 1 2 Spis
'MAPOSTAW' Praca zespołowa: Sylwester Adamczyk Krzysztof Radzikowski. Promotor: prof. dr hab. inż. Bogdan Branowski
 Mały pojazd miejski o napędzie spalinowym dla osób w starszym wieku i samotnych 'MAPOSTAW' Praca zespołowa: Sylwester Adamczyk Krzysztof Radzikowski Promotor: prof. dr hab. inż. Bogdan Branowski Cel pracy
Mały pojazd miejski o napędzie spalinowym dla osób w starszym wieku i samotnych 'MAPOSTAW' Praca zespołowa: Sylwester Adamczyk Krzysztof Radzikowski Promotor: prof. dr hab. inż. Bogdan Branowski Cel pracy
1. POMIAR SIŁY HAMOWANIA NA STANOWISKU ROLKOWYM
 1. POMIAR SIŁY HAMOWANIA NA STANOWISKU ROLKOWYM 1.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP obowiązujących w Laboratorium
1. POMIAR SIŁY HAMOWANIA NA STANOWISKU ROLKOWYM 1.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP obowiązujących w Laboratorium
 1 3 5 7 9 11 12 13 15 17 [Nm] 400 375 350 325 300 275 250 225 200 175 150 125 155 PS 100 PS 125 PS [kw][ps] 140 190 130 176 120 163 110 149 100 136 100 20 1000 1500 2000 2500 3000 3500 4000 4500 RPM 90
1 3 5 7 9 11 12 13 15 17 [Nm] 400 375 350 325 300 275 250 225 200 175 150 125 155 PS 100 PS 125 PS [kw][ps] 140 190 130 176 120 163 110 149 100 136 100 20 1000 1500 2000 2500 3000 3500 4000 4500 RPM 90
Podwozie. Części Deserter
 Page 1 of 9 Części Deserter Dane Techniczne:? Pojemność silnika 110ccm? Długość 1960mm? Szerokość 1160 mm? Wysokość 990 mm? Liczba osi 2? Masa pojazdu 136 kg? Typ silnika 1 cylinder 4 suw? Max moc 7,8
Page 1 of 9 Części Deserter Dane Techniczne:? Pojemność silnika 110ccm? Długość 1960mm? Szerokość 1160 mm? Wysokość 990 mm? Liczba osi 2? Masa pojazdu 136 kg? Typ silnika 1 cylinder 4 suw? Max moc 7,8
INSTRUKCJA MONTAŻU ZESTAWU EBIKE
 INSTRUKCJA MONTAŻU ZESTAWU EBIKE Instrukcja zawiera informację dotyczące montażu napędu elektrycznego do roweru oraz jakie wymagania musi spełnić rower. Do zamontowania potrzebna jest podstawowa wiedza
INSTRUKCJA MONTAŻU ZESTAWU EBIKE Instrukcja zawiera informację dotyczące montażu napędu elektrycznego do roweru oraz jakie wymagania musi spełnić rower. Do zamontowania potrzebna jest podstawowa wiedza
Równania różniczkowe opisujące ruch fotela z pilotem:
 . Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
. Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
3 w 1. Ekonomiczna Obsługa Pogwarancyjna to oferta dla samochodów dostawczych, starszych niż 2 lata.
 Ekonomiczna Obsługa Pogwarancyjna to oferta dla samochodów dostawczych, starszych niż 2 lata. Ekonomiczna Obsługa Pogwarancyjna to szereg rozwiązań, które dają pewność w biznesie. Sprawdzony pojazd, 2-letnia
Ekonomiczna Obsługa Pogwarancyjna to oferta dla samochodów dostawczych, starszych niż 2 lata. Ekonomiczna Obsługa Pogwarancyjna to szereg rozwiązań, które dają pewność w biznesie. Sprawdzony pojazd, 2-letnia
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Spis treści Przedmowa
 Spis treści Przedmowa 1. Wprowadzenie do problematyki konstruowania - Marek Dietrich (p. 1.1, 1.2), Włodzimierz Ozimowski (p. 1.3 -i-1.7), Jacek Stupnicki (p. l.8) 1.1. Proces konstruowania 1.2. Kryteria
Spis treści Przedmowa 1. Wprowadzenie do problematyki konstruowania - Marek Dietrich (p. 1.1, 1.2), Włodzimierz Ozimowski (p. 1.3 -i-1.7), Jacek Stupnicki (p. l.8) 1.1. Proces konstruowania 1.2. Kryteria
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
PL B1. Zespół napędowy pojazdu mechanicznego, zwłaszcza dla pojazdu przeznaczonego do użytkowania w ruchu miejskim
 PL 224683 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224683 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410139 (22) Data zgłoszenia: 14.11.2014 (51) Int.Cl.
PL 224683 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224683 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410139 (22) Data zgłoszenia: 14.11.2014 (51) Int.Cl.
Powtórzenie wiadomości z klasy I. Temat: Ruchy prostoliniowe. Obliczenia
 Powtórzenie wiadomości z klasy I Temat: Ruchy prostoliniowe. Obliczenia Ruch jest względny 1.Ruch i spoczynek są pojęciami względnymi. Można jednocześnie być w ruchu względem jednego ciała i w spoczynku
Powtórzenie wiadomości z klasy I Temat: Ruchy prostoliniowe. Obliczenia Ruch jest względny 1.Ruch i spoczynek są pojęciami względnymi. Można jednocześnie być w ruchu względem jednego ciała i w spoczynku
Dynamika mechanizmów
 Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Pakiety Informatyczne w Mechanice i Budowie Maszyn
 WYDZIAŁ INŻYNIERII MECHANICZNEJ I ROBOTYKI Katedra Systemów Energetycznych i Urządzeń Ochrony Środowiska Informatyka w Inżynierii Mechanicznej Pakiety Informatyczne w Mechanice i Budowie Maszyn Cel Przedmiotu:
WYDZIAŁ INŻYNIERII MECHANICZNEJ I ROBOTYKI Katedra Systemów Energetycznych i Urządzeń Ochrony Środowiska Informatyka w Inżynierii Mechanicznej Pakiety Informatyczne w Mechanice i Budowie Maszyn Cel Przedmiotu: