System automatycznego odwzorowania kształtu obiektów przestrzennych 3DMADMAC
|
|
|
- Teresa Brzozowska
- 8 lat temu
- Przeglądów:
Transkrypt
1 System automatycznego odwzorowania kształtu obiektów przestrzennych 3DMADMAC Robert Sitnik, Maciej Karaszewski, Wojciech Załuski, Paweł Bolewicki *OGX Optographx Instytut Mikromechaniki i Fotoniki Wydział Mechatroniki Politechnika Warszawska Współpraca: Muzeum Pałac w Wilanowie Akademia Sztuk Pięknych w Warszawie

2 Stan aktualny Proces dokumentacji 3D: a) wiele pomiarów kierunkowych (2.5D) b) wstępna filtracja danych c) łączenie danych pozyskanych z wielu kierunków 2

3 Stan aktualny 500 milionów punktów pomiarowych (pomiar z wykorzystaniem stolika obrotowego) (wysokość ~ 1,2m; dokładność: < 50µm; czas pomiaru: 16 godzin; czas przetwarzania: 95 godzin) 3

4 Stan aktualny Istniejące strategie pomiarowe Ręczne pozycjonowanie obiektu względem systemu Automatyczne pozycjonowanie w zadanych pozycjach 4

5 Stan aktualny Istniejące strategie łączenia danych pozyskanych z wielu kierunków Ręczne bądź półautomatyczne Automatyczne dla wybranych klas obiektów A S A S+1 5

6 Stan aktualny Niedoskonałości istniejących rozwiązań: - brak obiektywności pomiaru (czynnik ludzki) - dłuuuugi czas procesu pomiaru i analizy danych - ręczna lub pół-automatyczna manipulacja wzajemnego położenia system obiekt pomiarowy - wymagana jest bardzo intensywna interakcja użytownika z oprogramowaniem do analizy danych (użytkownik tworzy ścieżkę przetwarzania intuicyjnie) 6

7 Proponowane rozwiązanie Proponowany system wprowadza: - automatyczne pozycjonowanie systemu pomiarowego względem obiektu - automatyczne łączenie danych z wielu kierunków - automatyczne wyznaczanie następnych kierunków pomiarowych na podstawie aktualnego modelu - przechowywanie i analizę dużych zbiorów punktów pomiarowych (do kilkudziesięciu miliardów punktów pomiarowych) Obiektywny, szybki i powtarzalny pomiar! 7
 Obiektywny, szybki i powtarzalny pomiar!")
8 Oczekiwania i opinie użytkowników Muzelnicy: chcą korzystać z takiego rozwiązania w aspekcie dokumentacji, oceny i monitorowania stanu zachowania obiektu, wizualizacji, promocji i edukacji Badacze: mają wiele dystansu do automatycznych rozwiązań pozbawia ich ono obcowania z zabytkiem 8

9 Wstęp (objętość pomiarowa: 2,5m x 1,2m x 1,2m) 9

10 Głowica pomiarowa Projekcja prążków i kodów Gray a 10

11 Proces pomiaru z jednego kierunku 11

12 Proces pomiaru z jednego kierunku 12

13 Proces pomiaru z jednego kierunku 13

14 Głowica pomiarowa Parametry: - objętość pomiarowa: od 50mm x 50mm x 40mm do 1200mm x 900mm x 500mm - niepewność pomiaru: od 50µm do 1µm - czas pomiaru (z jednego kierunku): od 1 minuty do 0,25 sekundy 14
: od 1 minuty do 0,25 sekundy")
15 Wynik pomiaru (chmura punktów = nieuporządkowany zbiór punktów (x, y, z)) 15

16 Wynik pomiaru Każdy punkt pomiarowy dodatkowo reprezentowany jest przez: jakość punktu [0,1] wyznaczoną na podstawie modulacji prążków oraz kierunku powierzchni mierzonej względem systemu pomiarowego wektor normalny do powierzchni, współrzędne punktu w układzie matrycy detektora. 16

17 Pętla pomiarowa 1. Pomiar kierunkowy 2. Usunięcie błędnych punktów 3. Dopasowanie od istniejącego modelu 4. Wyznaczenie następnego kierunku 5. Powrót do punktu 1. 17

18 Moduły systemu 3DMADMAC AUTOMATED 1. Interfejs użytkownika 2. Moduł pozycjonowania - kinematyka odwrotna - Sterowanie serwomechanizmami 3. Moduł obliczeniowy - filtracja wstępna - iteracyjne dopasowanie chmur punktów - wyznaczanie następnego kierunku pomiarowego 4. Moduł detekcji kolizji - programowy - wizyjny 18

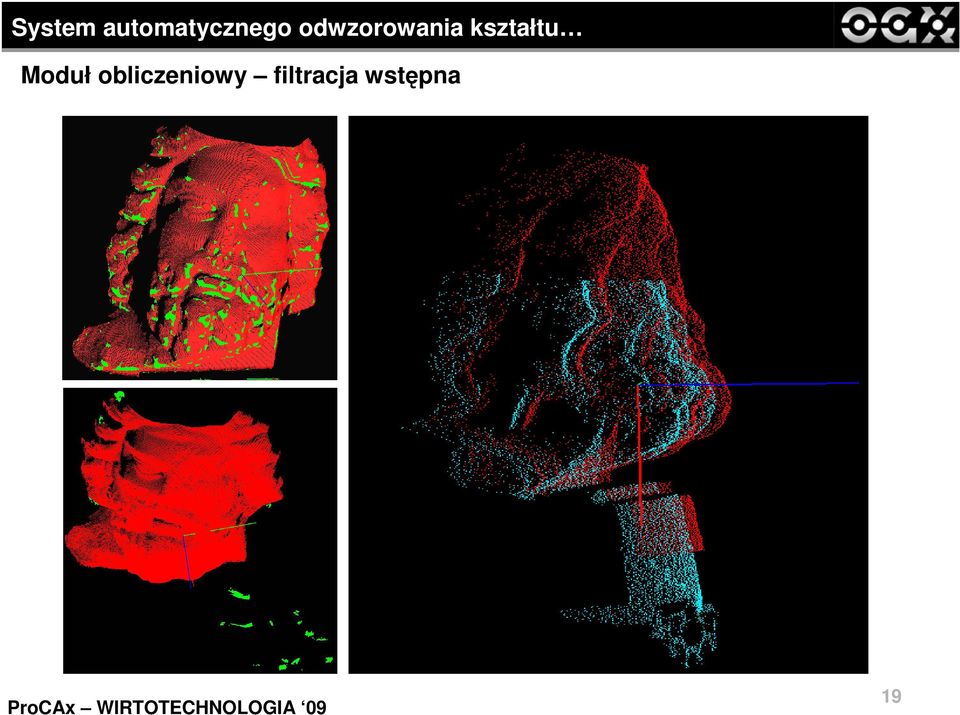
19 Moduł obliczeniowy filtracja wstępna 19

20 Moduł obliczeniowy iteracyjne dopasowanie chmur punktów Algorytm z rodziny ICP: - dopasowanie nowej chmury do istniejących - globalne dopasowanie minimalizujące błąd średniokwadratowy 20

21 Moduł obliczeniowy wyznaczanie następnego kierunku pomiarowego Wstępny pomiar całego obiektu Wyznaczenie dziur i ich wypełnienie 21
22 Detekcja kolizji Objętość pomiarowa podzielona na woksele (możliwe stany wokseli: pusty, obiekt lub nieznany) 22
23 Detekcja kolizji Pomiar nieznanych wokseli jeśli istnieje kolizja następnego widoku z objętością je reprezentującą lub nie napotkano obiektu 23
24 Moduł pozycjonowania Algorytmy kinematyki odwrotnej 24
25 Moduł pozycjonowania kalibracja układów współrzędnych 25
26 Moduł pozycjonowania kalibracja układów współrzędnych Kalibracja wyznaczana jest na podstawie sekwencyjnych pomiarów znanego obiektu M = R T = cosϕ *cosφ + sinϕ *sinφ *sinθ sinϕ *cosθ sinϕ *sinθ *cosφ cosϕi sinφ 0 sinϕ *cosφ cosϕ *sinθ *sinφ cosϕ cosθ cosϕ *sinθ *cosφ sinϕ *sinφ 0 cosθ *sinφ sinθ cosθ *cosφ x y z shift shift shift 1 26
27 Przykładowy proces pomiarowy 27
28 Przykładowy wynik mniejsza dokładność (80 milionów punktów) i większa (400 milionów punktów czas pomiaru ~ 3 godziny i przetwarzania danych 7 godzin) 28
29 Podsumowanie Opracowany system umożliwia: - pozycjonowanie systemu pomiarowego z 8 stopniami swobody - w pełni automatyczne pomiary w objętości: 2,5m x 1,2m x 1,2m - automatyczne przetwarzanie dużych zbiorów danych - uzyskanie obiektywnych wyników pomiaru - przyspieszenie pomiarów ponad dziesięciokrotnie w stosunku do istniejących rozwiązań 29
30 Podsumowanie Dzięki opracowaniu systemu możliwe stanie się: - wykonanie dokumentacji 3D obiektów dziedzictwa kulturowego w sposób masowy i powtarzalny - dokonanie porównania kształtu obiektu z różnych chwil czasowych w celu oceny zmian stanu zachowania - obniżenie kosztu dokumentacji 3D przy jednoczesnym zwiększeniu parametrów jakościowych i czasowych 30
31 Dane projektu Projekt badawczy rozwojowy: Zautomatyzowany system do trójwymiarowej digitalizacji obiektów polskiego i europejskiego dziedzictwa kulturowego Okres realizacji (36 miesięcy) 31
32 Dalsze prace wirtualne prezentacje 32
33 Dalsze prace Zintegrowany pomiar wielu parametrów dla każdego punktu (x,y,z): obrazy w wielu zakresach spektralnych (kilkanaście zakresów od bliskiej podczerwieni do UV), kierunkowe charakterystyki rozpraszania i odbicia, wektor normalny punktu, jakość odwzorowania punktu. Pomiar kształtu z wykorzystaniem deflektometrii 3D. 33
34 Dziękuję za uwagę! Robert Sitnik, Maciej Karaszewski, Wojciech Załuski, Paweł Bolewicki OGX Optographx Instytut Mikromechaniki i Fotoniki Wydział Mechatroniki Politechnika Warszawska Św. A. Boboli Warszawa tel.: fax: r.sitnik@mchtr.pw.edu.pl
Planowanie, realizacja i dokumentacja wzorcowego procesu digitalizacji 3D
 Planowanie, realizacja i dokumentacja wzorcowego procesu digitalizacji 3D obiektów muzealnych Robert Sitnik OGX OPTOGRAPHX Instytut Mikromechaniki i Fotoniki Politechnika Warszawska Plan prezentacji 1)
Planowanie, realizacja i dokumentacja wzorcowego procesu digitalizacji 3D obiektów muzealnych Robert Sitnik OGX OPTOGRAPHX Instytut Mikromechaniki i Fotoniki Politechnika Warszawska Plan prezentacji 1)
Przykłady realizacji dokumentacji przestrzennej obiektów zabytkowych
 Przykłady realizacji dokumentacji przestrzennej obiektów zabytkowych Robert Sitnik OGX OPTOGRAPHX Instytut Mikromechaniki i Fotoniki Politechnika Warszawska Plan prezentacji 1) Techniki odwzorowania współrzędnych
Przykłady realizacji dokumentacji przestrzennej obiektów zabytkowych Robert Sitnik OGX OPTOGRAPHX Instytut Mikromechaniki i Fotoniki Politechnika Warszawska Plan prezentacji 1) Techniki odwzorowania współrzędnych
Zastosowanie deflektometrii do pomiarów kształtu 3D. Katarzyna Goplańska
 Zastosowanie deflektometrii do pomiarów kształtu 3D Plan prezentacji Metody pomiaru kształtu Deflektometria Zasada działania Stereo-deflektometria Kalibracja Zalety Zastosowania Przykład Podsumowanie Metody
Zastosowanie deflektometrii do pomiarów kształtu 3D Plan prezentacji Metody pomiaru kształtu Deflektometria Zasada działania Stereo-deflektometria Kalibracja Zalety Zastosowania Przykład Podsumowanie Metody
Zbigniew Figiel, Piotr Dzikowicz. Skanowanie 3D przy projektowaniu i realizacji inwestycji w Koksownictwie KOKSOPROJEKT
 1 Zbigniew Figiel, Piotr Dzikowicz Skanowanie 3D przy projektowaniu i realizacji inwestycji w Koksownictwie 2 Plan prezentacji 1. Skanowanie laserowe 3D informacje ogólne; 2. Proces skanowania; 3. Proces
1 Zbigniew Figiel, Piotr Dzikowicz Skanowanie 3D przy projektowaniu i realizacji inwestycji w Koksownictwie 2 Plan prezentacji 1. Skanowanie laserowe 3D informacje ogólne; 2. Proces skanowania; 3. Proces
Temat: Skanowanie 3D obrazu w celu pomiaru odkształceń deski podobrazia
 Raport z przeprowadzonych badań Temat: Skanowanie 3D obrazu w celu pomiaru odkształceń deski podobrazia Spis treści Spis treści... 2 1.Cel badań... 3 2. Skanowanie 3D pozyskanie geometrii... 3 3. Praca
Raport z przeprowadzonych badań Temat: Skanowanie 3D obrazu w celu pomiaru odkształceń deski podobrazia Spis treści Spis treści... 2 1.Cel badań... 3 2. Skanowanie 3D pozyskanie geometrii... 3 3. Praca
 OMÓWIENIE TECHNOLOGII NAZIEMNEGO SKANINGU SKANING LASEROWY LASEROWGO ORAZ PRAKTYCZNYCH ASPEKTÓW ZASTOSOWANIA TEJ TECHNOLOGII W POLSKICH WARUNKACH Jacek Uchański Piotr Falkowski PLAN REFERATU 1. Wprowadzenie
OMÓWIENIE TECHNOLOGII NAZIEMNEGO SKANINGU SKANING LASEROWY LASEROWGO ORAZ PRAKTYCZNYCH ASPEKTÓW ZASTOSOWANIA TEJ TECHNOLOGII W POLSKICH WARUNKACH Jacek Uchański Piotr Falkowski PLAN REFERATU 1. Wprowadzenie
Zastosowanie niekoherentnych metod i systemów optycznych do monitorowania i pomiarów wielkogabarytowych konstrukcji budowlanych oraz maszyn
 Zastosowanie niekoherentnych metod i systemów optycznych do monitorowania i pomiarów wielkogabarytowych konstrukcji budowlanych oraz maszyn Małgorzata Kujawińska R. Sitnik, G. Dymny, M. Malesa D. Siwek,
Zastosowanie niekoherentnych metod i systemów optycznych do monitorowania i pomiarów wielkogabarytowych konstrukcji budowlanych oraz maszyn Małgorzata Kujawińska R. Sitnik, G. Dymny, M. Malesa D. Siwek,
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Trendy nauki światowej (1)
") Trendy nauki światowej (1) LOTNICZE PLATFORMY BEZZAŁOGOWE Badanie przydatności (LPB) do zadań fotogrametrycznych w roli: nośnika kamery cyfrowej, nośnika skanera laserowego, nośnika kamery wideo, zintegrowanej
Trendy nauki światowej (1) LOTNICZE PLATFORMY BEZZAŁOGOWE Badanie przydatności (LPB) do zadań fotogrametrycznych w roli: nośnika kamery cyfrowej, nośnika skanera laserowego, nośnika kamery wideo, zintegrowanej
Spektrometr XRF THICK 800A
 Spektrometr XRF THICK 800A DO POMIARU GRUBOŚCI POWŁOK GALWANIZNYCH THICK 800A spektrometr XRF do szybkich, nieniszczących pomiarów grubości powłok i ich składu. Zaprojektowany do pomiaru grubości warstw
Spektrometr XRF THICK 800A DO POMIARU GRUBOŚCI POWŁOK GALWANIZNYCH THICK 800A spektrometr XRF do szybkich, nieniszczących pomiarów grubości powłok i ich składu. Zaprojektowany do pomiaru grubości warstw
ZAPYTANIE OFERTOWE DOTYCZĄCE PROJEKTU REALIZOWANEGO W RAMACH REGIONALNEGO PROGRAMU OPERACYJNEGO DLA WOJEWÓDZTWA DOLNOŚLĄSKIEGO NA LATA 2007-2013
 Wrocław, 12.03.2015r. ZAPYTANIE OFERTOWE DOTYCZĄCE PROJEKTU REALIZOWANEGO W RAMACH REGIONALNEGO PROGRAMU OPERACYJNEGO DLA WOJEWÓDZTWA DOLNOŚLĄSKIEGO NA LATA 2007-2013 Priorytet 1: Wzrost konkurencyjności
Wrocław, 12.03.2015r. ZAPYTANIE OFERTOWE DOTYCZĄCE PROJEKTU REALIZOWANEGO W RAMACH REGIONALNEGO PROGRAMU OPERACYJNEGO DLA WOJEWÓDZTWA DOLNOŚLĄSKIEGO NA LATA 2007-2013 Priorytet 1: Wzrost konkurencyjności
Zastosowanie skaner 3D w medycynie -scan3dmed
 Zastosowanie skaner 3D w medycynie -scan3dmed Temat: Obliczanie powierzchni zmian skórnych za pomocą skanera 3D scan3dmed oraz oprogramowania SMARTTECH3Dmeasure firmy SMARTTECH na przykładzie kliniki SMILE
Zastosowanie skaner 3D w medycynie -scan3dmed Temat: Obliczanie powierzchni zmian skórnych za pomocą skanera 3D scan3dmed oraz oprogramowania SMARTTECH3Dmeasure firmy SMARTTECH na przykładzie kliniki SMILE
Oprogramowanie wspierające kalibrację kamer 3D oraz analizę głębi obrazu stereoskopowego. Piotr Perek. Łódź, 7 grudnia Politechnika Łódzka
 Oprogramowanie wspierające kalibrację kamer 3D oraz analizę głębi obrazu stereoskopowego Politechnika Łódzka Łódź, 7 grudnia 2015 1/19 Agenda 1 2 3 4 2/19 Rigi 3D Rig równoległy 3/19 Rigi 3D Rig równoległy
Oprogramowanie wspierające kalibrację kamer 3D oraz analizę głębi obrazu stereoskopowego Politechnika Łódzka Łódź, 7 grudnia 2015 1/19 Agenda 1 2 3 4 2/19 Rigi 3D Rig równoległy 3/19 Rigi 3D Rig równoległy
Raport z przeprowadzonych badań. Temat: Zaprojektowanie sposobu pomiaru wywroczyny oraz kontroli procesu gojenia.
 Raport z przeprowadzonych badań Temat: Zaprojektowanie sposobu pomiaru wywroczyny oraz kontroli procesu gojenia. 1 Spis treści 1.Cel badań...3 2. Skanowanie...3 3. Wymiarowanie rany...4 4. Wyznaczanie
Raport z przeprowadzonych badań Temat: Zaprojektowanie sposobu pomiaru wywroczyny oraz kontroli procesu gojenia. 1 Spis treści 1.Cel badań...3 2. Skanowanie...3 3. Wymiarowanie rany...4 4. Wyznaczanie
Wykorzystanie Bezzałogowych Statków Latających w różnych zastosowaniach budowalnych i geodezyjnych
 Wykorzystanie Bezzałogowych Statków Latających w różnych zastosowaniach budowalnych i geodezyjnych Współdziałanie inżynierów budownictwa i geodezji w procesie budowlanym" inż. Paweł Wójcik tel. 697 152
Wykorzystanie Bezzałogowych Statków Latających w różnych zastosowaniach budowalnych i geodezyjnych Współdziałanie inżynierów budownictwa i geodezji w procesie budowlanym" inż. Paweł Wójcik tel. 697 152
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011
 TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH KRÓTKA
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH KRÓTKA
Inżynieria odwrotna: zmniejszenie kosztów produkcji Optyczny system pomiarowy: MICRON3D green Oprogramowanie: SMARTTECH3Dmeasure Branża: motoryzacja
 Inżynieria odwrotna: zmniejszenie kosztów produkcji Optyczny system pomiarowy: MICRON3D green Oprogramowanie: SMARTTECH3Dmeasure Branża: motoryzacja Projekt pierwszego polskiego supersamochodu Arrinera
Inżynieria odwrotna: zmniejszenie kosztów produkcji Optyczny system pomiarowy: MICRON3D green Oprogramowanie: SMARTTECH3Dmeasure Branża: motoryzacja Projekt pierwszego polskiego supersamochodu Arrinera
ERGO 3D COMARCH ERGO. Wizualizacja i pomiary danych pochodzących ze skaningu mobilnego
 ERGO 3D COMARCH ERGO Wizualizacja i pomiary danych pochodzących ze skaningu mobilnego COMARCH ERGO 3D Comarch ERGO 3D jest elementem kompleksowej Platformy Comarch ERGO, dostępnym we wszystkich jej systemach
ERGO 3D COMARCH ERGO Wizualizacja i pomiary danych pochodzących ze skaningu mobilnego COMARCH ERGO 3D Comarch ERGO 3D jest elementem kompleksowej Platformy Comarch ERGO, dostępnym we wszystkich jej systemach
SZCZEGÓŁOWY OPIS PRZEDMIOTU ZAMÓWIENIA (parametry i wymagania minimalne)
") ZP/UR/79/2014 Załącznik nr 1.1 do SIWZ SZCZEGÓŁOWY OPIS PRZEDMIOTU ZAMÓWIENIA (parametry i wymagania minimalne) Dostawa zestawu systemów skanowania 3D dla jednostki Uniwersytetu Rzeszowskiego w ramach
ZP/UR/79/2014 Załącznik nr 1.1 do SIWZ SZCZEGÓŁOWY OPIS PRZEDMIOTU ZAMÓWIENIA (parametry i wymagania minimalne) Dostawa zestawu systemów skanowania 3D dla jednostki Uniwersytetu Rzeszowskiego w ramach
Manipulator OOO z systemem wizyjnym
 Studenckie Koło Naukowe Robotyki Encoder Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska Manipulator OOO z systemem wizyjnym Raport z realizacji projektu Daniel Dreszer Kamil Gnacik Paweł
Studenckie Koło Naukowe Robotyki Encoder Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska Manipulator OOO z systemem wizyjnym Raport z realizacji projektu Daniel Dreszer Kamil Gnacik Paweł
Problematyka budowy skanera 3D doświadczenia własne
 Problematyka budowy skanera 3D doświadczenia własne dr inż. Ireneusz Wróbel ATH Bielsko-Biała, Evatronix S.A. iwrobel@ath.bielsko.pl mgr inż. Paweł Harężlak mgr inż. Michał Bogusz Evatronix S.A. Plan wykładu
Problematyka budowy skanera 3D doświadczenia własne dr inż. Ireneusz Wróbel ATH Bielsko-Biała, Evatronix S.A. iwrobel@ath.bielsko.pl mgr inż. Paweł Harężlak mgr inż. Michał Bogusz Evatronix S.A. Plan wykładu
Nowa metoda pomiarów parametrów konstrukcyjnych hełmów ochronnych z wykorzystaniem skanera 3D
 Nowa metoda pomiarów parametrów konstrukcyjnych hełmów ochronnych z wykorzystaniem skanera 3D dr inż. Marcin Jachowicz, CIOP-PIB 2016 r. Na wielu stanowiskach pracy, na których występuje ryzyko urazu głowy
Nowa metoda pomiarów parametrów konstrukcyjnych hełmów ochronnych z wykorzystaniem skanera 3D dr inż. Marcin Jachowicz, CIOP-PIB 2016 r. Na wielu stanowiskach pracy, na których występuje ryzyko urazu głowy
THICK 800A DO POMIARU GRUBOŚCI POWŁOK. THICK 800A spektrometr XRF do szybkich, nieniszczących pomiarów grubości powłok i ich składu.
 THICK 800A DO POMIARU GRUBOŚCI POWŁOK THICK 800A spektrometr XRF do szybkich, nieniszczących pomiarów grubości powłok i ich składu. Zoptymalizowany do pomiaru grubości warstw Detektor Si-PIN o rozdzielczości
THICK 800A DO POMIARU GRUBOŚCI POWŁOK THICK 800A spektrometr XRF do szybkich, nieniszczących pomiarów grubości powłok i ich składu. Zoptymalizowany do pomiaru grubości warstw Detektor Si-PIN o rozdzielczości
Metody optyczne z wykorzystaniem światła koherentnego do monitorowania i wysokoczułych pomiarów inżynierskich obiektów statycznych i dynamicznych
 Metody optyczne z wykorzystaniem światła koherentnego do monitorowania i wysokoczułych pomiarów inżynierskich obiektów statycznych i dynamicznych Kierownik: Małgorzata Kujawioska Wykonawcy: Leszek Sałbut,
Metody optyczne z wykorzystaniem światła koherentnego do monitorowania i wysokoczułych pomiarów inżynierskich obiektów statycznych i dynamicznych Kierownik: Małgorzata Kujawioska Wykonawcy: Leszek Sałbut,
UKŁAD AUTOMATYCZNEJ REGULACJI STACJI TRANSFORMATOROWO - PRZESYŁOWYCH TYPU ARST
 Oddział Gdańsk JEDNOSTKA BADAWCZO-ROZWOJOWA ul. Mikołaja Reja 27, 80-870 Gdańsk tel. (48 58) 349 82 00, fax: (48 58) 349 76 85 e-mail: ien@ien.gda.pl http://www.ien.gda.pl ZAKŁAD TECHNIKI MIKROPROCESOROWEJ
Oddział Gdańsk JEDNOSTKA BADAWCZO-ROZWOJOWA ul. Mikołaja Reja 27, 80-870 Gdańsk tel. (48 58) 349 82 00, fax: (48 58) 349 76 85 e-mail: ien@ien.gda.pl http://www.ien.gda.pl ZAKŁAD TECHNIKI MIKROPROCESOROWEJ
WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI
 WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI Stefan WÓJTOWICZ, Katarzyna BIERNAT ZAKŁAD METROLOGII I BADAŃ NIENISZCZĄCYCH INSTYTUT ELEKTROTECHNIKI ul. Pożaryskiego 8, 04-703 Warszawa tel. (0)
WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI Stefan WÓJTOWICZ, Katarzyna BIERNAT ZAKŁAD METROLOGII I BADAŃ NIENISZCZĄCYCH INSTYTUT ELEKTROTECHNIKI ul. Pożaryskiego 8, 04-703 Warszawa tel. (0)
Automatyczne tworzenie trójwymiarowego planu pomieszczenia z zastosowaniem metod stereowizyjnych
 Automatyczne tworzenie trójwymiarowego planu pomieszczenia z zastosowaniem metod stereowizyjnych autor: Robert Drab opiekun naukowy: dr inż. Paweł Rotter 1. Wstęp Zagadnienie generowania trójwymiarowego
Automatyczne tworzenie trójwymiarowego planu pomieszczenia z zastosowaniem metod stereowizyjnych autor: Robert Drab opiekun naukowy: dr inż. Paweł Rotter 1. Wstęp Zagadnienie generowania trójwymiarowego
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
Inżynieria odwrotna w modelowaniu inżynierskim przykłady zastosowań
 Inżynieria odwrotna w modelowaniu inżynierskim przykłady zastosowań Dr inż. Marek Wyleżoł Politechnika Śląska, Katedra Podstaw Konstrukcji Maszyn O autorze 1996 mgr inż., Politechnika Śląska 2000 dr inż.,
Inżynieria odwrotna w modelowaniu inżynierskim przykłady zastosowań Dr inż. Marek Wyleżoł Politechnika Śląska, Katedra Podstaw Konstrukcji Maszyn O autorze 1996 mgr inż., Politechnika Śląska 2000 dr inż.,
Skanery 3D firmy Z Corporation. 2009 Z Corporation
 2009 Z Corporation Zasada działania Przylegające do powierzchni markery nakładane są w sposób losowy Kamery CCD śledzą punkty referencyjne i za pomocą triangulacji (rozłożenia powierzchni na zbiór trójkątów)
2009 Z Corporation Zasada działania Przylegające do powierzchni markery nakładane są w sposób losowy Kamery CCD śledzą punkty referencyjne i za pomocą triangulacji (rozłożenia powierzchni na zbiór trójkątów)
Zintegrowane systemy zarządzania zapachową jakością powietrza
 Zintegrowane systemy zarządzania zapachową jakością powietrza Dr hab. inż. Izabela Sówka, prof. PWr II Konferencja Naukowo-Techniczna: Technologie informatyczne w ochronie i kształtowaniu środowiska 14
Zintegrowane systemy zarządzania zapachową jakością powietrza Dr hab. inż. Izabela Sówka, prof. PWr II Konferencja Naukowo-Techniczna: Technologie informatyczne w ochronie i kształtowaniu środowiska 14
 Charakterystyka mierników do badania oświetlenia Obiektywne badania warunków oświetlenia opierają się na wynikach pomiarów parametrów świetlnych. Podobnie jak każdy pomiar, również te pomiary, obarczone
Charakterystyka mierników do badania oświetlenia Obiektywne badania warunków oświetlenia opierają się na wynikach pomiarów parametrów świetlnych. Podobnie jak każdy pomiar, również te pomiary, obarczone
Czym jest OnDynamic? OnDynamic dostarcza wartościowych danych w czasie rzeczywistym, 24/7 dni w tygodniu w zakresie: czasu przejazdu,
 Czym jest OnDynamic? OnDynamic (Multimodalny System Monitoringu Ruchu Drogowego) to inteligentna architektura czujników i specjalistycznego oprogramowania, które gwarantują przetwarzanie dużej ilości różnorodnych
Czym jest OnDynamic? OnDynamic (Multimodalny System Monitoringu Ruchu Drogowego) to inteligentna architektura czujników i specjalistycznego oprogramowania, które gwarantują przetwarzanie dużej ilości różnorodnych
Volkswagen Poznań. 6. Ogólnopolska Konferencja Jakościowa Dostawców Motoryzacyjnych 2017
 Volkswagen Poznań 6. Ogólnopolska Konferencja Jakościowa Dostawców Motoryzacyjnych 2017 Robert Koteras Volkswagen Poznań Zaawansowane metody pomiaru Możliwości i Wyzwania 6. Ogólnopolska Konferencja Jakościowa
Volkswagen Poznań 6. Ogólnopolska Konferencja Jakościowa Dostawców Motoryzacyjnych 2017 Robert Koteras Volkswagen Poznań Zaawansowane metody pomiaru Możliwości i Wyzwania 6. Ogólnopolska Konferencja Jakościowa
Mechanika. Wykład 2. Paweł Staszel
 Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
Temat: Zaprojektowanie procesu kontroli jakości wymiarów geometrycznych na przykładzie obudowy.
 Raport z przeprowadzonych pomiarów. Temat: Zaprojektowanie procesu kontroli jakości wymiarów geometrycznych na przykładzie obudowy. Spis treści 1.Cel pomiaru... 3 2. Skanowanie 3D- pozyskanie geometrii
Raport z przeprowadzonych pomiarów. Temat: Zaprojektowanie procesu kontroli jakości wymiarów geometrycznych na przykładzie obudowy. Spis treści 1.Cel pomiaru... 3 2. Skanowanie 3D- pozyskanie geometrii
MOŻLIWOŚCI NOWOCZESNYCH ZINTEGROWANYCH SYSTEMÓW ZARZĄDZANIA RUCHEM NA PRZYKŁADZIE SYSTEMU WARSZAWSKIEGO
 MOŻLIWOŚCI NOWOCZESNYCH ZINTEGROWANYCH SYSTEMÓW ZARZĄDZANIA RUCHEM NA PRZYKŁADZIE SYSTEMU WARSZAWSKIEGO Zintegrowany System Zarządzania opracował: Sebastian Kubanek Ruchem w Warszawie Cele Zintegrowanego
MOŻLIWOŚCI NOWOCZESNYCH ZINTEGROWANYCH SYSTEMÓW ZARZĄDZANIA RUCHEM NA PRZYKŁADZIE SYSTEMU WARSZAWSKIEGO Zintegrowany System Zarządzania opracował: Sebastian Kubanek Ruchem w Warszawie Cele Zintegrowanego
Projekt współfinansowany ze środków Unii Europejskiej przyznanych Polsce w ramach Programu Operacyjnego Innowacyjna Gospodarka, Priorytet II,
 Projekt współfinansowany ze środków Unii Europejskiej przyznanych Polsce w ramach Programu Operacyjnego Innowacyjna Gospodarka, Priorytet II, Działanie 2.3 oraz ze środków Budżetu Państwa Cel Celem projektu
Projekt współfinansowany ze środków Unii Europejskiej przyznanych Polsce w ramach Programu Operacyjnego Innowacyjna Gospodarka, Priorytet II, Działanie 2.3 oraz ze środków Budżetu Państwa Cel Celem projektu
Skanowanie 3D potwierdza precyzję elementów drukowanych na drukarkach 3D
 Skanowanie 3D potwierdza precyzję elementów drukowanych na drukarkach 3D Kontrola jakości: weryfikacja jakości wydruku 3D części samochodowej Skaner 3D: MICRON3D green 10 MPix Drukarka 3D: Factory 2.0
Skanowanie 3D potwierdza precyzję elementów drukowanych na drukarkach 3D Kontrola jakości: weryfikacja jakości wydruku 3D części samochodowej Skaner 3D: MICRON3D green 10 MPix Drukarka 3D: Factory 2.0
Określenie celów digitalizacji 3D czyli kiedy i dlaczego decydujemy się na wykonanie dokumentacji trójwymiarowej Eryk Bunsch
 Określenie celów digitalizacji 3D czyli kiedy i dlaczego decydujemy się na wykonanie dokumentacji trójwymiarowej Eryk Bunsch Warszawa, dnia 21 stycznia 2013 roku Decyzja o wykorzystaniu w muzeum pomiarów
Określenie celów digitalizacji 3D czyli kiedy i dlaczego decydujemy się na wykonanie dokumentacji trójwymiarowej Eryk Bunsch Warszawa, dnia 21 stycznia 2013 roku Decyzja o wykorzystaniu w muzeum pomiarów
Karolina Żurek. 17 czerwiec 2010r.
 Karolina Żurek 17 czerwiec 2010r. Skanowanie laserowe to metoda pomiaru polegająca na przenoszeniu rzeczywistego kształtu trójwymiarowego obiektu do postaci cyfrowej. Bezpośrednim produktem skanowania
Karolina Żurek 17 czerwiec 2010r. Skanowanie laserowe to metoda pomiaru polegająca na przenoszeniu rzeczywistego kształtu trójwymiarowego obiektu do postaci cyfrowej. Bezpośrednim produktem skanowania
Podstawy przetwarzania danych pochodzących z lotniczego skanowania laserowego w oprogramowaniu LP360 firmy QCoherent
 Podstawy przetwarzania danych pochodzących z lotniczego skanowania laserowego w oprogramowaniu LP360 firmy QCoherent Mateusz Maślanka Specjalista ds. oprogramowania LiDAR mateusz.maslanka@progea.pl Mateusz
Podstawy przetwarzania danych pochodzących z lotniczego skanowania laserowego w oprogramowaniu LP360 firmy QCoherent Mateusz Maślanka Specjalista ds. oprogramowania LiDAR mateusz.maslanka@progea.pl Mateusz
Pomiar 3D ludzkiego ciała
 Pomiar 3D ludzkiego ciała Przedstawione poniżej opracowanie prezentuje badanie z zakresu pomiaru ludzkiego ciała. Celem jest zaprezentowanie wpływu produktów tekstylnych na rozmiar naturalnego obrzęku
Pomiar 3D ludzkiego ciała Przedstawione poniżej opracowanie prezentuje badanie z zakresu pomiaru ludzkiego ciała. Celem jest zaprezentowanie wpływu produktów tekstylnych na rozmiar naturalnego obrzęku
Zastosowanie SKANINGU LASEROWEGO PMG Wierzchowice W R O G E O
 Zastosowanie SKANINGU LASEROWEGO PMG Wierzchowice W R O G E O u l. M i ń s k a 3 8 54-6 1 0 W r o c ł a w W DUŻYM SKRÓCIE Co to jest skaning? Podgląd i edycja wyników skanowania Chmura punktów, wirtualna
Zastosowanie SKANINGU LASEROWEGO PMG Wierzchowice W R O G E O u l. M i ń s k a 3 8 54-6 1 0 W r o c ł a w W DUŻYM SKRÓCIE Co to jest skaning? Podgląd i edycja wyników skanowania Chmura punktów, wirtualna
Zastosowanie oprogramowania Proficy (ifix, Historian oraz Plant Applications) w laboratoryjnym stanowisku monitoringu systemów produkcyjnych in-line
 w laboratoryjnym stanowisku monitoringu systemów produkcyjnych in-line") Zastosowanie oprogramowania Proficy (ifix, Historian oraz Plant Applications) w laboratoryjnym stanowisku monitoringu systemów produkcyjnych in-line Dr inż. Grzegorz Ćwikła Stanowisko do monitoringu systemów
Zastosowanie oprogramowania Proficy (ifix, Historian oraz Plant Applications) w laboratoryjnym stanowisku monitoringu systemów produkcyjnych in-line Dr inż. Grzegorz Ćwikła Stanowisko do monitoringu systemów
Zastosowanie optycznej techniki pomiarowej w przemyśle ceramicznym
 Zastosowanie optycznej techniki pomiarowej w przemyśle ceramicznym Ze względu na coraz większe techniczne wymagania, nowe materiały i krótkie cykle produkcyjne, przemysł ceramiczny stoi przed nowymi technicznymi
Zastosowanie optycznej techniki pomiarowej w przemyśle ceramicznym Ze względu na coraz większe techniczne wymagania, nowe materiały i krótkie cykle produkcyjne, przemysł ceramiczny stoi przed nowymi technicznymi
Metrologia wymiarowa dużych odległości oraz dla potrzeb mikro- i nanotechnologii
 Metrologia wymiarowa dużych odległości oraz dla potrzeb mikro- i nanotechnologii Grażyna Rudnicka Mariusz Wiśniewski, Dariusz Czułek, Robert Szumski, Piotr Sosinowski Główny Urząd Miar Mapy drogowe EURAMET
Metrologia wymiarowa dużych odległości oraz dla potrzeb mikro- i nanotechnologii Grażyna Rudnicka Mariusz Wiśniewski, Dariusz Czułek, Robert Szumski, Piotr Sosinowski Główny Urząd Miar Mapy drogowe EURAMET
XVII Wyprawa Bari studentów z KNG Dahlta z Akademii Górniczo Hutniczej w Krakowie im. S. Staszica w Krakowie Testy odbiornika Spectra Precision SP60
 XVII Wyprawa Bari studentów z KNG Dahlta z Akademii Górniczo Hutniczej w Krakowie im. S. Staszica w Krakowie Testy odbiornika Spectra Precision SP60 Inwentaryzacja archeologiczno-geodezyjna dwóch stanowisk
XVII Wyprawa Bari studentów z KNG Dahlta z Akademii Górniczo Hutniczej w Krakowie im. S. Staszica w Krakowie Testy odbiornika Spectra Precision SP60 Inwentaryzacja archeologiczno-geodezyjna dwóch stanowisk
Akcesoria / ToolKit Box. System fotogrametryczny do skanowania 3D
 Akcesoria / ToolKit Box System fotogrametryczny do skanowania 3D Akcesoria / ToolKit Box Jakie są korzyści? Szybkość skanowania: skanuj duże obiekty 3 razy szybciej niż w tradycyjny sposób przy użyciu
Akcesoria / ToolKit Box System fotogrametryczny do skanowania 3D Akcesoria / ToolKit Box Jakie są korzyści? Szybkość skanowania: skanuj duże obiekty 3 razy szybciej niż w tradycyjny sposób przy użyciu
ROZWIĄZANIA WIZYJNE PRZEMYSŁOWE. Rozwiązania WIZYJNE. Capture the Power of Machine Vision POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD
 POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
Katedra Geodezji Satelitarnej i Nawigacji. Geodezja i geoinformatyka
 Załącznik nr 8 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Adam
Załącznik nr 8 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Adam
TITAN 2.0. Analiza czasowo- przestrzenna. Opis zmian wprowadzonych do wersji 2.0 w odniesieniu do wersji 1.0
 TITAN 2.0 Analiza czasowo- przestrzenna Opis zmian wprowadzonych do wersji 2.0 w odniesieniu do wersji 1.0 Kraków, marzec 2017 WIZUALIZACJA/ANIMACJA RUCHU ANALIZOWANYCH OBIEKTÓW 1 TITAN w nowej wersji
TITAN 2.0 Analiza czasowo- przestrzenna Opis zmian wprowadzonych do wersji 2.0 w odniesieniu do wersji 1.0 Kraków, marzec 2017 WIZUALIZACJA/ANIMACJA RUCHU ANALIZOWANYCH OBIEKTÓW 1 TITAN w nowej wersji
Zintegrowany system monitoringu stanu środowiska w procesach poszukiwania i eksploatacji gazu z łupków
 8 października 2013, POZNAŃ Zintegrowany system monitoringu stanu środowiska w procesach poszukiwania i eksploatacji gazu z łupków prof. Jarosław Arabas, prof. Jarosław Mizera, dr hab. Jerzy Weremczuk
8 października 2013, POZNAŃ Zintegrowany system monitoringu stanu środowiska w procesach poszukiwania i eksploatacji gazu z łupków prof. Jarosław Arabas, prof. Jarosław Mizera, dr hab. Jerzy Weremczuk
WYDZIAŁ ELEKTRYCZNY. Optoelektroniczne pomiary aksjograficzne stawu skroniowo-żuchwowego człowieka
 dr inż. Witold MICKIEWICZ dr inż. Jerzy SAWICKI Optoelektroniczne pomiary aksjograficzne stawu skroniowo-żuchwowego człowieka Aksjografia obrazowanie ruchu osi zawiasowej żuchwy - Nowa metoda pomiarów
dr inż. Witold MICKIEWICZ dr inż. Jerzy SAWICKI Optoelektroniczne pomiary aksjograficzne stawu skroniowo-żuchwowego człowieka Aksjografia obrazowanie ruchu osi zawiasowej żuchwy - Nowa metoda pomiarów
Zastosowanie technologii poszerzonej rzeczywistości do wspomagania inspekcji obiektów mostowych
 Konferencja infrabim 8-9 listopada 2016 r. GLIWICE Zastosowanie technologii poszerzonej rzeczywistości do wspomagania inspekcji obiektów mostowych Marcin JANUSZKA, dr inż. Marek SALAMAK, dr hab. inż. Gliwice
Konferencja infrabim 8-9 listopada 2016 r. GLIWICE Zastosowanie technologii poszerzonej rzeczywistości do wspomagania inspekcji obiektów mostowych Marcin JANUSZKA, dr inż. Marek SALAMAK, dr hab. inż. Gliwice
Inżynieria odwrotna przywraca blask starym klasykom
 Inżynieria odwrotna przywraca blask starym klasykom Inżynieria odwrotna: odtwarzanie części samochodowej Optyczny system pomiarowy: scan3d surface 5 MPix Oprogramowanie: SMARTTECH3Dmeasure, Design X Branża:
Inżynieria odwrotna przywraca blask starym klasykom Inżynieria odwrotna: odtwarzanie części samochodowej Optyczny system pomiarowy: scan3d surface 5 MPix Oprogramowanie: SMARTTECH3Dmeasure, Design X Branża:
Propozycje wykorzystania zdjęć panoramicznych w GIS i geodezji
 Propozycje wykorzystania zdjęć panoramicznych w GIS i geodezji Michał Bednarczyk Renata Pelc-Mieczkowska UWM Olsztyn XXIV DOROCZNA KONFERENCJA PTIP ROZWÓJ METOD I TECHNOLOGII GEOPRZESTRZENNYCH Wstęp Technika
Propozycje wykorzystania zdjęć panoramicznych w GIS i geodezji Michał Bednarczyk Renata Pelc-Mieczkowska UWM Olsztyn XXIV DOROCZNA KONFERENCJA PTIP ROZWÓJ METOD I TECHNOLOGII GEOPRZESTRZENNYCH Wstęp Technika
XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne
 XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne W dniu 13.10.2017 odbyło się XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe
XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne W dniu 13.10.2017 odbyło się XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe
2. Oferta usług. 3. Partnerzy
 2. Oferta usług Oferujemy naszym klientom współpracę w następujących dziedzinach: Rozwój, produkcja i próby prototypów Analizy obliczeniowe, opracowanie dokumentacji technicznych Analizy projektowe, projekty
2. Oferta usług Oferujemy naszym klientom współpracę w następujących dziedzinach: Rozwój, produkcja i próby prototypów Analizy obliczeniowe, opracowanie dokumentacji technicznych Analizy projektowe, projekty
Oprogramowanie FormControl
 Pomiar przez kliknięcie myszą. Właśnie tak prosta jest inspekcja detalu w centrum obróbczym z pomocą oprogramowania pomiarowego FormControl. Nie ma znaczenia, czy obrabiany detal ma swobodny kształt powierzchni
Pomiar przez kliknięcie myszą. Właśnie tak prosta jest inspekcja detalu w centrum obróbczym z pomocą oprogramowania pomiarowego FormControl. Nie ma znaczenia, czy obrabiany detal ma swobodny kształt powierzchni
Grafika Komputerowa Wykład 4. Synteza grafiki 3D. mgr inż. Michał Chwesiuk 1/30
 Wykład 4 mgr inż. 1/30 Synteza grafiki polega na stworzeniu obrazu w oparciu o jego opis. Synteza obrazu w grafice komputerowej polega na wykorzystaniu algorytmów komputerowych do uzyskania obrazu cyfrowego
Wykład 4 mgr inż. 1/30 Synteza grafiki polega na stworzeniu obrazu w oparciu o jego opis. Synteza obrazu w grafice komputerowej polega na wykorzystaniu algorytmów komputerowych do uzyskania obrazu cyfrowego
Systemy skanerów 3D. Profesjonalne systemy skanerów 3D dla Przemysłu
 Systemy skanerów 3D Profesjonalne systemy skanerów 3D dla Przemysłu Skanery 3D firmy SMARTTECH innowacyjność i doświadczenie w pomiarach 3D Skanery 3D to systemy do bezdotykowego pomiaru kształtu obiektów
Systemy skanerów 3D Profesjonalne systemy skanerów 3D dla Przemysłu Skanery 3D firmy SMARTTECH innowacyjność i doświadczenie w pomiarach 3D Skanery 3D to systemy do bezdotykowego pomiaru kształtu obiektów
XI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne
 XI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne W dniu 01.04.2016 odbyło się XI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy
XI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne W dniu 01.04.2016 odbyło się XI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy
NOWOCZESNE TECHNOLOGIE ENERGETYCZNE Rola modelowania fizycznego i numerycznego
 Politechnika Częstochowska Katedra Inżynierii Energii NOWOCZESNE TECHNOLOGIE ENERGETYCZNE Rola modelowania fizycznego i numerycznego dr hab. inż. Zbigniew BIS, prof P.Cz. dr inż. Robert ZARZYCKI Wstęp
Politechnika Częstochowska Katedra Inżynierii Energii NOWOCZESNE TECHNOLOGIE ENERGETYCZNE Rola modelowania fizycznego i numerycznego dr hab. inż. Zbigniew BIS, prof P.Cz. dr inż. Robert ZARZYCKI Wstęp
ComarchERGO 3D zaawansowanym narzędziem wspomagającym zarządzanie drogami Adam Ramza
 ComarchERGO 3D zaawansowanym narzędziem wspomagającym zarządzanie drogami Adam Ramza Kierownik Produktu Comarch SA 1. ComarchERGO idea i działanie Systemu 2. ComarchERGO 3D zaawansowane narzędzie wizualizacji
ComarchERGO 3D zaawansowanym narzędziem wspomagającym zarządzanie drogami Adam Ramza Kierownik Produktu Comarch SA 1. ComarchERGO idea i działanie Systemu 2. ComarchERGO 3D zaawansowane narzędzie wizualizacji
Doświadczenia w eksploatacji gazomierzy ultradźwiękowych
 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych Daniel Wysokiński Mateusz Turkowski Rogów 18-20 września 2013 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych 1 Gazomierze ultradźwiękowe
Doświadczenia w eksploatacji gazomierzy ultradźwiękowych Daniel Wysokiński Mateusz Turkowski Rogów 18-20 września 2013 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych 1 Gazomierze ultradźwiękowe
Politechnika Gdańska WYDZIAŁ ELEKTRONIKI TELEKOMUNIKACJI I INFORMATYKI. Katedra Metrologii i Optoelektroniki. Metrologia. Ilustracje do wykładu
 Politechnika Gdańska WYDZIAŁ ELEKTRONIKI TELEKOMUNIKACJI I INFORMATYKI Katedra Metrologii i Optoelektroniki Metrologia Studia I stopnia, kier Elektronika i Telekomunikacja, sem. 2 Ilustracje do wykładu
Politechnika Gdańska WYDZIAŁ ELEKTRONIKI TELEKOMUNIKACJI I INFORMATYKI Katedra Metrologii i Optoelektroniki Metrologia Studia I stopnia, kier Elektronika i Telekomunikacja, sem. 2 Ilustracje do wykładu
System wspomagania harmonogramowania przedsięwzięć budowlanych
 System wspomagania harmonogramowania przedsięwzięć budowlanych Wojciech Bożejko 1 Zdzisław Hejducki 2 Mariusz Uchroński 1 Mieczysław Wodecki 3 1 Instytut Informatyki, Automatyki i Robotyki Politechnika
System wspomagania harmonogramowania przedsięwzięć budowlanych Wojciech Bożejko 1 Zdzisław Hejducki 2 Mariusz Uchroński 1 Mieczysław Wodecki 3 1 Instytut Informatyki, Automatyki i Robotyki Politechnika
7. Metody pozyskiwania danych
 7. Metody pozyskiwania danych Jedną z podstawowych funkcji systemu informacji przestrzennej jest pozyskiwanie danych. Od jakości pozyskanych danych i ich kompletności będą zależały przyszłe możliwości
7. Metody pozyskiwania danych Jedną z podstawowych funkcji systemu informacji przestrzennej jest pozyskiwanie danych. Od jakości pozyskanych danych i ich kompletności będą zależały przyszłe możliwości
POLITECHNIKA RZESZOWSKA ZAKŁAD CIEPŁOWNICTWA I KLIMATYZACJI WYDZIAŁ BUDOWNICTWA I INŻYNIERII ŚRODOWISKA. dr inż. Danuta Proszak
 POLITECHNIKA RZESZOWSKA ZAKŁAD CIEPŁOWNICTWA I KLIMATYZACJI WYDZIAŁ BUDOWNICTWA I INŻYNIERII ŚRODOWISKA dr inż. Danuta Proszak jest dziedziną nauki zajmującą się rejestrowaniem, przetwarzaniem oraz zobrazowaniem
POLITECHNIKA RZESZOWSKA ZAKŁAD CIEPŁOWNICTWA I KLIMATYZACJI WYDZIAŁ BUDOWNICTWA I INŻYNIERII ŚRODOWISKA dr inż. Danuta Proszak jest dziedziną nauki zajmującą się rejestrowaniem, przetwarzaniem oraz zobrazowaniem
EFEKTYWNOŚĆ SYSTEMU ZARZĄDZANIA RUCHEM WWARSZAWIE SEBASTIAN KUBANEK. Zarząd Dróg Miejskich w Warszawie
 EFEKTYWNOŚĆ SYSTEMU ZARZĄDZANIA RUCHEM WWARSZAWIE SEBASTIAN KUBANEK Zarząd Dróg Miejskich w Warszawie System Sterowania Ruchem: Obszar Powiśla, ciąg Wisłostrady wraz z tunelem ciąg Al. Jerozolimskich Priorytet
EFEKTYWNOŚĆ SYSTEMU ZARZĄDZANIA RUCHEM WWARSZAWIE SEBASTIAN KUBANEK Zarząd Dróg Miejskich w Warszawie System Sterowania Ruchem: Obszar Powiśla, ciąg Wisłostrady wraz z tunelem ciąg Al. Jerozolimskich Priorytet
Ogrzewamy inteligentnie Veolia Energia Warszawa Paweł Balas Dyrektor Projektu Inteligentna Sieć Ciepłownicza
 Ogrzewamy inteligentnie Veolia Energia Warszawa Paweł Balas Dyrektor Projektu Inteligentna Sieć Ciepłownicza 74 Forum EEŚ w ramach Energy Days - 30 czerwca 2015 roku Warszawa Veolia Energia Warszawa Veolia
Ogrzewamy inteligentnie Veolia Energia Warszawa Paweł Balas Dyrektor Projektu Inteligentna Sieć Ciepłownicza 74 Forum EEŚ w ramach Energy Days - 30 czerwca 2015 roku Warszawa Veolia Energia Warszawa Veolia
Praktyczne aspekty statycznej estymacji stanu pracy elektroenergetycznych sieci dystrybucyjnych w warunkach krajowych
 ZARZĄDZANIE ENERGIĄ I TELEINFORMATYKA, ZET 03 Praktyczne aspekty statycznej estymacji stanu pracy elektroenergetycznych sieci dystrybucyjnych w warunkach krajowych Jacek Wasilewski Politechnika Warszawska
ZARZĄDZANIE ENERGIĄ I TELEINFORMATYKA, ZET 03 Praktyczne aspekty statycznej estymacji stanu pracy elektroenergetycznych sieci dystrybucyjnych w warunkach krajowych Jacek Wasilewski Politechnika Warszawska
SŁUŻBA GEODEZYJNA I KARTOGRAFICZNA W OBLICZU NADCHODZĄCYCH ZMIAN
 Zapobieganie powstawaniu zagrożeń powodziowych na terenach zalewowych powstałych w wyniku eksploatacji górniczej przy wykorzystaniu danych pochodzących ze skaningu laserowego Wojciech Jeszka Agata Szeliga
Zapobieganie powstawaniu zagrożeń powodziowych na terenach zalewowych powstałych w wyniku eksploatacji górniczej przy wykorzystaniu danych pochodzących ze skaningu laserowego Wojciech Jeszka Agata Szeliga
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
K-Series Optyczna WMP. Mobilne oraz innowacyjne rozwiązania metrologiczne. www.smart-solutions.pl WWW.METRIS.COM
 K-Series Optyczna WMP Mobilne oraz innowacyjne rozwiązania metrologiczne Spis treści Optyczna WMP Przegląd Cechy i Zalety Technologia Optycznej WMP K-Series hardware Zastosowania K-Scan - skaning ręczny
K-Series Optyczna WMP Mobilne oraz innowacyjne rozwiązania metrologiczne Spis treści Optyczna WMP Przegląd Cechy i Zalety Technologia Optycznej WMP K-Series hardware Zastosowania K-Scan - skaning ręczny
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013
 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR Dr inż. Jacek Górski Dr Krzysztof Bojarowski Opracowanie założeń redakcyjnych mapy
STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR Dr inż. Jacek Górski Dr Krzysztof Bojarowski Opracowanie założeń redakcyjnych mapy
Szczegółowa charakterystyka przedmiotu zamówienia
 Szczegółowa charakterystyka przedmiotu zamówienia Przedmiotem zamówienia jest dostawa i uruchomienie zestawu termowizyjnego wysokiej rozdzielczości wraz z wyposażeniem o parametrach zgodnych z określonymi
Szczegółowa charakterystyka przedmiotu zamówienia Przedmiotem zamówienia jest dostawa i uruchomienie zestawu termowizyjnego wysokiej rozdzielczości wraz z wyposażeniem o parametrach zgodnych z określonymi
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI. Robot do pokrycia powierzchni terenu
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
Katowice GPW 2013. Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową. Jan Studziński
 Katowice GPW 2013 Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową Jan Studziński 1 1. Wstęp Cel pracy Usprawnienie zarządzania siecią wodociągową za pomocą nowoczesnych
Katowice GPW 2013 Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową Jan Studziński 1 1. Wstęp Cel pracy Usprawnienie zarządzania siecią wodociągową za pomocą nowoczesnych
Lp. Promotor Temat Dyplomant 1. Dr inż. A. Dumalski. Zastosowanie sieci modularnych do zakładania osnów pomiarowych 2. Dr inż. A.
 2009/2010 Propozycje tematów prac dyplomowych na studiach stacjonarnych inżynierskich realizowanych w Instytucie Geodezji Specjalność geodezja i szacowanie nieruchomości Olsztyn Limit 40 Lp. Promotor Temat
2009/2010 Propozycje tematów prac dyplomowych na studiach stacjonarnych inżynierskich realizowanych w Instytucie Geodezji Specjalność geodezja i szacowanie nieruchomości Olsztyn Limit 40 Lp. Promotor Temat
PROCES DIGITALIZACJI 3D OD ZAŁOŻEŃ DO DOKUMENTACJI CYFROWEJ
 Eryk Bunsch, Robert Sitnik PROCES DIGITALIZACJI 3D OD ZAŁOŻEŃ DO DOKUMENTACJI CYFROWEJ echniki digitalizacji dzieł sztuki stają się coraz bardziej uznawanym i stosowanym narzędziem w procesie dokumentacji
Eryk Bunsch, Robert Sitnik PROCES DIGITALIZACJI 3D OD ZAŁOŻEŃ DO DOKUMENTACJI CYFROWEJ echniki digitalizacji dzieł sztuki stają się coraz bardziej uznawanym i stosowanym narzędziem w procesie dokumentacji
SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS
 II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
Dwukanałowy miernik mocy i energii optycznej z detektorami
 SZCZEGÓŁOWY OPIS PRZEDMIOTU ZAMÓWIENIA Dostawa, wraz z montażem, uruchomieniem i bezpłatnym instruktażem, następującej aparatury naukowo badawczej, fabrycznie nowej i kompletnej: Dwukanałowy miernik mocy
SZCZEGÓŁOWY OPIS PRZEDMIOTU ZAMÓWIENIA Dostawa, wraz z montażem, uruchomieniem i bezpłatnym instruktażem, następującej aparatury naukowo badawczej, fabrycznie nowej i kompletnej: Dwukanałowy miernik mocy
ZDALNA REJESTRACJA POWIERZCHNI ZIEMI
 Zdalne metody (teledetekcję) moŝna w szerokim pojęciu zdefiniować jako gromadzenie informacji o obiekcie bez fizycznego kontaktu z nim (Mularz, 2004). Zdalne metody (teledetekcję) moŝna w szerokim pojęciu
Zdalne metody (teledetekcję) moŝna w szerokim pojęciu zdefiniować jako gromadzenie informacji o obiekcie bez fizycznego kontaktu z nim (Mularz, 2004). Zdalne metody (teledetekcję) moŝna w szerokim pojęciu
Uniwersytet Wirtualny VU2012
 XII Konferencja Uniwersytet Wirtualny VU2012 M o d e l N a r z ę d z i a P r a k t y k a Andrzej ŻYŁAWSKI Warszawska Wyższa Szkoła Informatyki Marcin GODZIEMBA-MALISZEWSKI Instytut Technologii Eksploatacji
XII Konferencja Uniwersytet Wirtualny VU2012 M o d e l N a r z ę d z i a P r a k t y k a Andrzej ŻYŁAWSKI Warszawska Wyższa Szkoła Informatyki Marcin GODZIEMBA-MALISZEWSKI Instytut Technologii Eksploatacji
BlueAir-ST. FlowTemp. 62
 FlowTemp 62 www.analizatory.pl POMIAR PRZEPŁYWU Ręczne przyrządy pomiarowe do regulacji i kalibracji systemów ogrzewania, chłodzenia i wentylacji PRĘDKOŚĆ POWIETRZA Miernik prędkości powietrza i przepływu
FlowTemp 62 www.analizatory.pl POMIAR PRZEPŁYWU Ręczne przyrządy pomiarowe do regulacji i kalibracji systemów ogrzewania, chłodzenia i wentylacji PRĘDKOŚĆ POWIETRZA Miernik prędkości powietrza i przepływu
Zintegrowany System Zarządzania
 MOśLIWOŚCI NOWOCZESNYCH ZINTEGROWANYCH SYSTEMÓW ZARZĄDZANIA RUCHEM NA PRZYKŁADZIE SYSTEMU WARSZAWSKIEGO Zintegrowany System Zarządzania opracował: Sebastian Kubanek Ruchem w Warszawie Cele Zintegrowanego
MOśLIWOŚCI NOWOCZESNYCH ZINTEGROWANYCH SYSTEMÓW ZARZĄDZANIA RUCHEM NA PRZYKŁADZIE SYSTEMU WARSZAWSKIEGO Zintegrowany System Zarządzania opracował: Sebastian Kubanek Ruchem w Warszawie Cele Zintegrowanego
Ćwiczenie: "Pomiary rezystancji przy prądzie stałym"
 Ćwiczenie: "Pomiary rezystancji przy prądzie stałym" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki.
Ćwiczenie: "Pomiary rezystancji przy prądzie stałym" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki.
Aparaty słuchowe Hi-Fi z Multiphysics Modeling
 Aparaty słuchowe Hi-Fi z Multiphysics Modeling POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania Mechanika i Budowa Maszyn Technologia Przetwarzania Materiałów Prowadzący: dr hab. Tomasz Stręk
Aparaty słuchowe Hi-Fi z Multiphysics Modeling POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania Mechanika i Budowa Maszyn Technologia Przetwarzania Materiałów Prowadzący: dr hab. Tomasz Stręk
Podstawy elektroniki i metrologii
 Politechnika Gdańska WYDZIAŁ ELEKTRONIKI TELEKOMUNIKACJI I INFORMATYKI Katedra Metrologii i Optoelektroniki Podstawy elektroniki i metrologii Studia I stopnia kier. Informatyka semestr 2 Ilustracje do
Politechnika Gdańska WYDZIAŁ ELEKTRONIKI TELEKOMUNIKACJI I INFORMATYKI Katedra Metrologii i Optoelektroniki Podstawy elektroniki i metrologii Studia I stopnia kier. Informatyka semestr 2 Ilustracje do
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
SPOSOBY POMIARU KĄTÓW W PROGRAMIE AutoCAD
 Dr inż. Jacek WARCHULSKI Dr inż. Marcin WARCHULSKI Mgr inż. Witold BUŻANTOWICZ Wojskowa Akademia Techniczna SPOSOBY POMIARU KĄTÓW W PROGRAMIE AutoCAD Streszczenie: W referacie przedstawiono możliwości
Dr inż. Jacek WARCHULSKI Dr inż. Marcin WARCHULSKI Mgr inż. Witold BUŻANTOWICZ Wojskowa Akademia Techniczna SPOSOBY POMIARU KĄTÓW W PROGRAMIE AutoCAD Streszczenie: W referacie przedstawiono możliwości
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA
 PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia. Mgr inż.
 Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia Mgr inż. Dorota Smorawa Plan prezentacji 1. Wprowadzenie do zagadnienia 2. Opis urządzeń badawczych
Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia Mgr inż. Dorota Smorawa Plan prezentacji 1. Wprowadzenie do zagadnienia 2. Opis urządzeń badawczych
3GHz (opcja 6GHz) Cyfrowy Analizator Widma GA4063
 Cyfrowy Analizator Widma GA4063") Cyfrowy Analizator Widma GA4063 3GHz (opcja 6GHz) Wysoka kla sa pomiarowa Duże możliwości pomiarowo -funkcjonalne Wysoka s tabi lność Łatwy w użyc iu GUI Małe wymiary, lekki, przenośny Opis produktu GA4063
Cyfrowy Analizator Widma GA4063 3GHz (opcja 6GHz) Wysoka kla sa pomiarowa Duże możliwości pomiarowo -funkcjonalne Wysoka s tabi lność Łatwy w użyc iu GUI Małe wymiary, lekki, przenośny Opis produktu GA4063
Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka
 Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka Poznań, 16.05.2012r. Raport z promocji projektu Nowa generacja energooszczędnych
Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka Poznań, 16.05.2012r. Raport z promocji projektu Nowa generacja energooszczędnych
Wyniki pomiarów okresu drgań dla wahadła o długości l = 1,215 m i l = 0,5 cm.
 2 Wyniki pomiarów okresu drgań dla wahadła o długości l = 1,215 m i l = 0,5 cm. Nr pomiaru T[s] 1 2,21 2 2,23 3 2,19 4 2,22 5 2,25 6 2,19 7 2,23 8 2,24 9 2,18 10 2,16 Wyniki pomiarów okresu drgań dla wahadła
2 Wyniki pomiarów okresu drgań dla wahadła o długości l = 1,215 m i l = 0,5 cm. Nr pomiaru T[s] 1 2,21 2 2,23 3 2,19 4 2,22 5 2,25 6 2,19 7 2,23 8 2,24 9 2,18 10 2,16 Wyniki pomiarów okresu drgań dla wahadła