ska koło zębate do listwy zębatej. Jest to zabezpieczenie przed skakaniem koła zębatego po listwie zębatej, na przykład podczas gwałtownych
|
|
|
- Eleonora Mazurek
- 9 lat temu
- Przeglądów:
Transkrypt
1

2
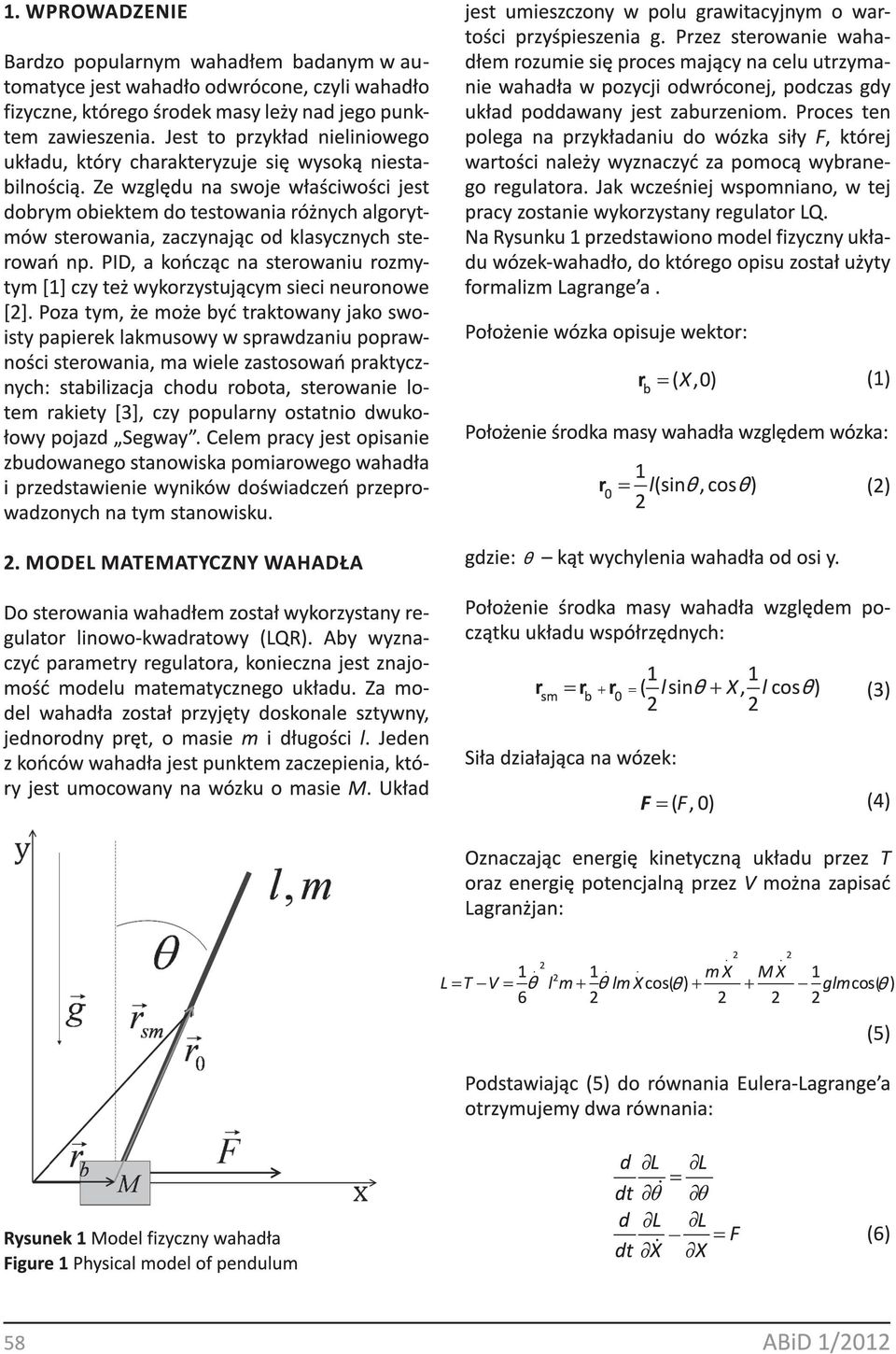
3 Rozwiązując równania (6) otrzymuje się: 8F 3gm sin(2θ ) + 4θ&2lm sin(θ ) X&& = 3m cos(2θ ) + 5m + 8M 6F cos(θ ) 6g sin(θ )(m + M) + 3θ&2lm sin(θ )cos(θ ) θ&& = 3lm cos2 (θ ) 4l(m + M) (7) ska koło zębate do listwy zębatej. Jest to zabezpieczenie przed skakaniem koła zębatego po listwie zębatej, na przykład podczas gwałtownych hamowań. Masa wózka wynosi 1,1 kg, masa wahadła 0,06 kg, długość wahadła to 0,6 m. Długość listwy zębatej, po której może poruszać się wózek, wynosi 0,972 m. Cały układ przedstawia Rysunek 3. Otrzymane równania ruchu będą wykorzystane do wyznaczenia parametrów regulatora LQ. 3. OPIS STANOWISKA Układ składa się z trzech zasadniczych części: wózka, wahadła oraz urządzeń stanowiących układ sterujący. 3.1 Wózek i wahadło Na Rysunku 2 przedstawiono zdjęcie wózka. Rysunek 3 Zdjęcie całego układu pomiarowego Figure 3 Photo of the whole measuring system Rysunek 2 Zdjęcie wózka, na którym umieszczone jest wahadło Figure 2 Carriage with pendulum Podstawowym elementem wózka jest silnik prądu stałego z enkoderem (SHINANO KENSHI DX E2N01 30V/1600rpm 60W), na którego osi zamocowane jest koło zębate. Za pomocą aluminiowych profili silnik połączony jest z łożyskiem liniowym, które może przesuwać się po stalowym wałku prowadzącym. Koło zębate założone na oś silnika spoczywa na listwie zębatej. Przyłożenie napięcia do silnika spowoduje jego obrót i w konsekwencji wózek przesunie się. Sterowanie wózkiem sprowadza się, zatem do odpowiedniej regulacji napięcia przykładanego do silnika. U góry wózka widać enkoder inkrementalny (SM /5), na którego ośce zamontowane jest wahadło w postaci aluminiowej rurki. Z tyłu wózka zamocowane jest kółko, które doci- 3.2 Aparatura sterująca Sterowanie w pętli zamkniętej wymaga informacji o aktualnym stanie układu. Wychylenie wahadła oraz położenie wózka mierzone jest za pomocą enkoderów. Enkoder wahadła wysyła impuls co 0,1, a enkoder silnika co 0,1091 mm. Impulsy z enkoderów rejestrowane są za pomocą mikrokontrolera Atmega16. Sterowanie napięciem i kierunkiem obrotów silnika odbywa się poprzez sterownik VNH3SP30. Na Rysunku 4 widać mikrokontroler wraz ze sterownikiem silnika. Cały proces zarządzany jest przez komputer PC, który połączony jest z mikrokontrolerem za pomocą standardu RS-232. Na Rysunku 5 pokazano ideę układu sterowania. Rysunek 4 Aparatura sterująca Figure 4 Equipment control ABiD 1/2012 Sterowanie położeniem odwróconego wahadła w pętli zamkniętej 59

4

5
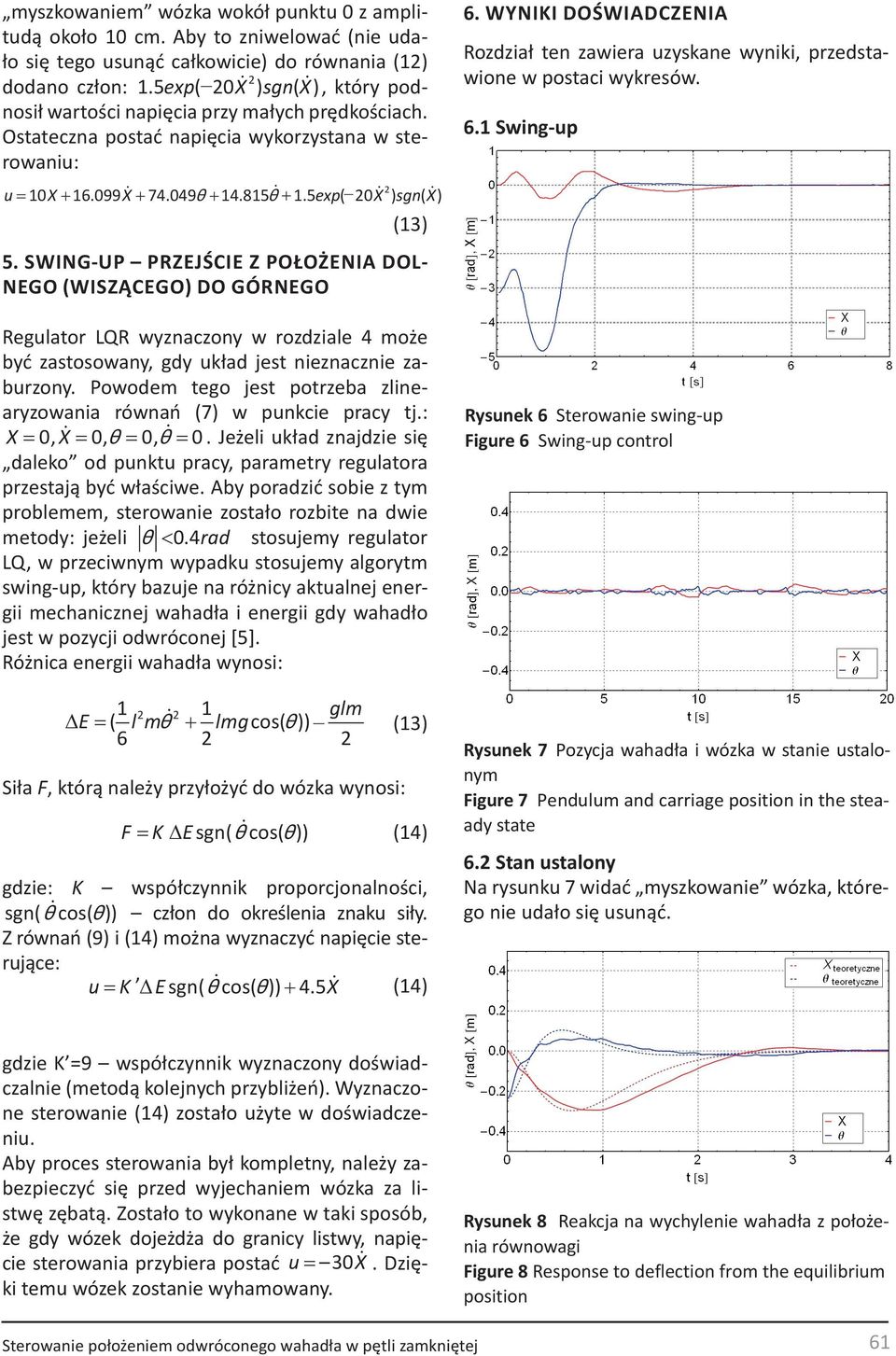
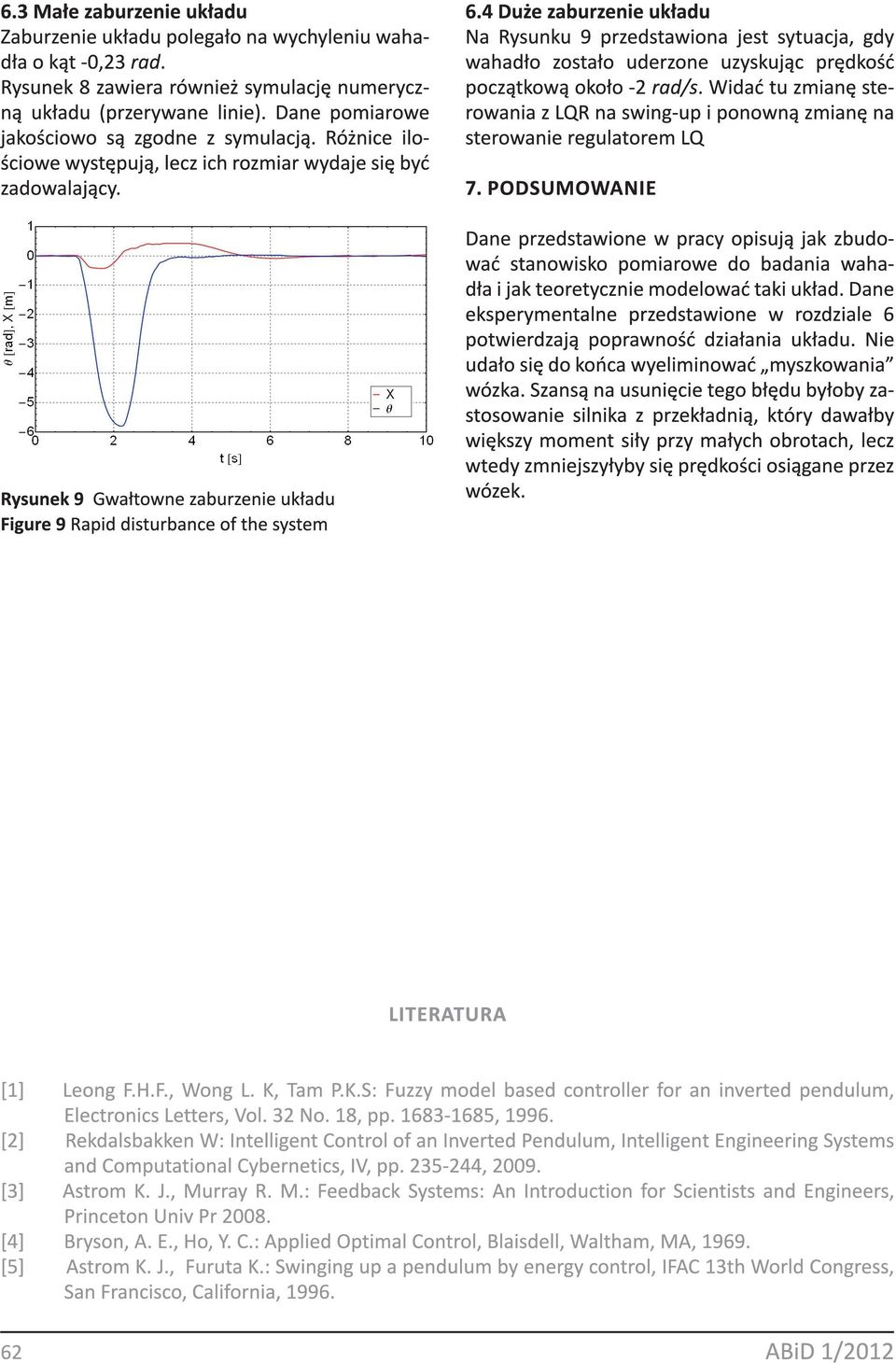
6
Tematy zadań do rozwiązania przy użyciu modułu symulacji dynamicznej programu Autodesk Inventor
 Tematy zadań do rozwiązania przy użyciu modułu symulacji dynamicznej programu Autodesk Inventor (na podstawie J.Giergiel, L.Głuch, A.Łopata: Zbiór zadań z mechaniki.wydawnictwo AGH, Kraków 2011r.) Temat
Tematy zadań do rozwiązania przy użyciu modułu symulacji dynamicznej programu Autodesk Inventor (na podstawie J.Giergiel, L.Głuch, A.Łopata: Zbiór zadań z mechaniki.wydawnictwo AGH, Kraków 2011r.) Temat
ELEKTROMECHANICZNY SYGNALIZATOR POZIOMU SPMS-4
 Zakład Mechaniki Precyzyjnej Gliwice 17.10.2006 NIVOMER 44-100 Gliwice, ul. Portowa 21 NIP 631-020-75-37 e-mail: nivomer@poczta.onet.pl fax.tel. (032) 238-20-31 0601-40-31-21 ELEKTROMECHANICZNY SYGNALIZATOR
Zakład Mechaniki Precyzyjnej Gliwice 17.10.2006 NIVOMER 44-100 Gliwice, ul. Portowa 21 NIP 631-020-75-37 e-mail: nivomer@poczta.onet.pl fax.tel. (032) 238-20-31 0601-40-31-21 ELEKTROMECHANICZNY SYGNALIZATOR
PL 214592 B1. POLITECHNIKA CZĘSTOCHOWSKA, Częstochowa, PL 14.03.2011 BUP 06/11
 PL 214592 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214592 (13) B1 (21) Numer zgłoszenia: 388915 (51) Int.Cl. G01B 5/28 (2006.01) G01C 7/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 214592 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214592 (13) B1 (21) Numer zgłoszenia: 388915 (51) Int.Cl. G01B 5/28 (2006.01) G01C 7/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Układy zasilania samochodowych silników spalinowych. Bartosz Ponczek AiR W10
 Układy zasilania samochodowych silników spalinowych Bartosz Ponczek AiR W10 ECU (Engine Control Unit) Urządzenie elektroniczne zarządzające systemem zasilania silnika. Na podstawie informacji pobieranych
Układy zasilania samochodowych silników spalinowych Bartosz Ponczek AiR W10 ECU (Engine Control Unit) Urządzenie elektroniczne zarządzające systemem zasilania silnika. Na podstawie informacji pobieranych
Wahadło odwrocone (NI Elvis 2) Modelowanie i stabilizacja w dolnym położeniu równowagi.
 Modelowanie i stabilizacja w dolnym położeniu równowagi.") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Wahadło odwrocone (NI Elvis 2) Modelowanie i stabilizacja w dolnym położeniu równowagi.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Wahadło odwrocone (NI Elvis 2) Modelowanie i stabilizacja w dolnym położeniu równowagi.
Ruch jednostajnie przyspieszony Wariant B - z czujnikiem ruchu
 Szczególnie ważnym przypadkiem ruchu jest ruch jednostajnie przyspieszony prostoliniowy, w którym ciało porusza się ze stałym przyspieszeniem. Zgodnie z drugą zasadą Newtona, stałe przyspieszenie wynika
Szczególnie ważnym przypadkiem ruchu jest ruch jednostajnie przyspieszony prostoliniowy, w którym ciało porusza się ze stałym przyspieszeniem. Zgodnie z drugą zasadą Newtona, stałe przyspieszenie wynika
Badanie własności fotodiody
 Badanie własności fotodiody Ryszard Kostecki 13 maja 22 Wstęp Celem tego doświadczenia było wykonanie charakterystyki prądowo-napięciowej fotodiody dla różnych wartości natężenia padającego światła, a
Badanie własności fotodiody Ryszard Kostecki 13 maja 22 Wstęp Celem tego doświadczenia było wykonanie charakterystyki prądowo-napięciowej fotodiody dla różnych wartości natężenia padającego światła, a
Czujniki prędkości obrotowej silnika
 Czujniki prędkości obrotowej silnika Czujniki prędkości obrotowej silnika 1 Jednym z najważniejszych sygnałów pomiarowych używanych przez program sterujący silnikiem spalinowym ZI jest sygnał kątowego
Czujniki prędkości obrotowej silnika Czujniki prędkości obrotowej silnika 1 Jednym z najważniejszych sygnałów pomiarowych używanych przez program sterujący silnikiem spalinowym ZI jest sygnał kątowego
ELEKTROMECHANICZNY SYGNALIZATOR POZIOMU SPMS-4
 44-100 Gliwice, ul. Portowa owa 21 NIP 631-020-75-37 e-mail: nivomer@poczta.onet.pl www: www.nivomer.pl fax./tel. (032) 234-50-06 0601-40-31-21 ELEKTROMECHANICZNY SYGNALIZATOR POZIOMU SPMS-4 Spis treści:
44-100 Gliwice, ul. Portowa owa 21 NIP 631-020-75-37 e-mail: nivomer@poczta.onet.pl www: www.nivomer.pl fax./tel. (032) 234-50-06 0601-40-31-21 ELEKTROMECHANICZNY SYGNALIZATOR POZIOMU SPMS-4 Spis treści:
EGZEMPURZARCfflW4LNY WZORU UŻYTKOWEGO (12,OPIS OCHRONNY. d9) PL (11)62914
 PL (11)62914") EGZEMPURZARCfflW4LNY RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12,OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 114645 (22) Data zgłoszenia: 26.02.2004 d9) PL (11)62914 (13)
EGZEMPURZARCfflW4LNY RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12,OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 114645 (22) Data zgłoszenia: 26.02.2004 d9) PL (11)62914 (13)
Sterowanie układem zawieszenia magnetycznego
 Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
@ Data zgłoszenia: 11.04.2000
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej m OPIS OCHRONNY PL 61131 WZORU UŻYTKOWEGO i2) Y1 f2n Numer zgłoszenia: 110868 @ Data zgłoszenia: 11.04.2000 Intel7:
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej m OPIS OCHRONNY PL 61131 WZORU UŻYTKOWEGO i2) Y1 f2n Numer zgłoszenia: 110868 @ Data zgłoszenia: 11.04.2000 Intel7:
PL B1. PRZEMYSŁOWY INSTYTUT AUTOMATYKI I POMIARÓW PIAP, Warszawa, PL BUP 13/09. RAFAŁ CZUPRYNIAK, Warszawa, PL
 PL 215871 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215871 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 384030 (22) Data zgłoszenia: 12.12.2007 (51) Int.Cl.
PL 215871 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215871 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 384030 (22) Data zgłoszenia: 12.12.2007 (51) Int.Cl.
BADANIE SILNIKA WYKONAWCZEGO PRĄDU STAŁEGO
 Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Malej Mocy BADANIE SILNIKA WYKONAWCZEGO PRĄD STAŁEGO Warszawa 2003 1. WSTĘP. Silnik wykonawczy prądu stałego o wzbudzeniu
Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Malej Mocy BADANIE SILNIKA WYKONAWCZEGO PRĄD STAŁEGO Warszawa 2003 1. WSTĘP. Silnik wykonawczy prądu stałego o wzbudzeniu
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
PL B1. INSTYTUT TECHNIKI BUDOWLANEJ, Warszawa, PL BUP 05/ WUP 11/16. WOJCIECH KUJAWSKI, Poznań, PL
 PL 224149 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224149 (13) B1 (21) Numer zgłoszenia: 411400 (51) Int.Cl. G01M 3/00 (2006.01) G01M 3/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 224149 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224149 (13) B1 (21) Numer zgłoszenia: 411400 (51) Int.Cl. G01M 3/00 (2006.01) G01M 3/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 219055 B1. UNIWERSYTET PRZYRODNICZY W LUBLINIE, Lublin, PL 07.05.2012 BUP 10/12 31.03.2015 WUP 03/15. ANDRZEJ ANATOL STĘPNIEWSKI, Lublin, PL
 PL 219055 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219055 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 392821 (22) Data zgłoszenia: 02.11.2010 (51) Int.Cl.
PL 219055 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219055 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 392821 (22) Data zgłoszenia: 02.11.2010 (51) Int.Cl.
3. Oś X. 3. Oś X. Instrukcja montażu osi X. Written By: Dozuki System manual.prusa3d.com Page 1 of 11
 3. Oś X Instrukcja montażu osi X Written By: Dozuki System 2017 manual.prusa3d.com Page 1 of 11 Step 1 Potrzebne narzędzia Klucz imbusowy 2,5 mm Małe szczypce uniwersalne (kombinerki) Step 2 Części wydrukowane
3. Oś X Instrukcja montażu osi X Written By: Dozuki System 2017 manual.prusa3d.com Page 1 of 11 Step 1 Potrzebne narzędzia Klucz imbusowy 2,5 mm Małe szczypce uniwersalne (kombinerki) Step 2 Części wydrukowane
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL INSTYTUT TECHNOLOGII EKSPLOATACJI. PAŃSTWOWY INSTYTUT BADAWCZY, Radom, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207917 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 380341 (22) Data zgłoszenia: 31.07.2006 (51) Int.Cl. G01B 21/04 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207917 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 380341 (22) Data zgłoszenia: 31.07.2006 (51) Int.Cl. G01B 21/04 (2006.01)
2.1 Porównanie procesorów
 1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
OPIS PRZEDMIOTU ZAMÓWIENIA
 Załącznik nr 1 do zapytania ofertowego nr 12/2018 na dostawę i montaż fabrycznie nowej czopiarki do ram okien dachowych OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest dostawa i fabrycznie nowej
Załącznik nr 1 do zapytania ofertowego nr 12/2018 na dostawę i montaż fabrycznie nowej czopiarki do ram okien dachowych OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest dostawa i fabrycznie nowej
WZORU PRZEMYSŁOWEGO PL 19773. GTV SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ SPÓŁKA KOMANDYTOWO-AKCYJNA, Pruszków, (PL) 30.08.
 30.08.") PL 19773 RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY WZORU PRZEMYSŁOWEGO (19) PL (11) 19773 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 20682 (22) Data zgłoszenia: 19.02.2013 (51) Klasyfikacja:
PL 19773 RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY WZORU PRZEMYSŁOWEGO (19) PL (11) 19773 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 20682 (22) Data zgłoszenia: 19.02.2013 (51) Klasyfikacja:
WZORU UŻYTKOWEGO (,9,PL <1» 63238
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA (12) OPIS OCHRONNY Dl.,_ WZORU UŻYTKOWEGO (,9,PL
Stanowisko do pomiaru fotoprzewodnictwa
 Stanowisko do pomiaru fotoprzewodnictwa Kraków 2008 Układ pomiarowy. Pomiar czułości widmowej fotodetektorów polega na pomiarze fotoprądu w funkcji długości padającego na detektor promieniowania. Stanowisko
Stanowisko do pomiaru fotoprzewodnictwa Kraków 2008 Układ pomiarowy. Pomiar czułości widmowej fotodetektorów polega na pomiarze fotoprądu w funkcji długości padającego na detektor promieniowania. Stanowisko
Raport z budowy robota typu Linefollower Mały. Marcin Węgrzyn
 Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Zastosowanie silników krokowych jako napęd robota mobilnego
 Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
PL B1. SZCZĘŚNIAK ZBIGNIEW BUDOWA POJAZDÓW SPECJALNYCH, Jaworze Dolne, PL BUP 24/ WUP 09/11
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209597 (13) B1 (21) Numer zgłoszenia: 368142 (51) Int.Cl. B60P 1/44 (2006.01) A62C 27/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209597 (13) B1 (21) Numer zgłoszenia: 368142 (51) Int.Cl. B60P 1/44 (2006.01) A62C 27/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Napęd do bram przesuwnych S-MATIC AC /101 S-MATIC AC /101
 Napęd do bram przesuwnych S-MATIC AC500-41525/101 S-MATIC AC700-41725/101 MIWI-URMET Sp. z o.o. 91-341 Łódź, ul. Pojezierska 90A tel. +48 42 616 21 00, fax +48 42 616 21 13 miwi@miwiurmet.pl, http://miwiurmet.pl
Napęd do bram przesuwnych S-MATIC AC500-41525/101 S-MATIC AC700-41725/101 MIWI-URMET Sp. z o.o. 91-341 Łódź, ul. Pojezierska 90A tel. +48 42 616 21 00, fax +48 42 616 21 13 miwi@miwiurmet.pl, http://miwiurmet.pl
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
(86) Data i numer zgłoszenia międzynarodowego: 17.09.2003, PCT/SE03/001438 (87) Data i numer publikacji zgłoszenia międzynarodowego:
 Data i numer zgłoszenia międzynarodowego: 17.09.2003, PCT/SE03/001438 (87) Data i numer publikacji zgłoszenia międzynarodowego:") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 212673 (21) Numer zgłoszenia: 374660 (22) Data zgłoszenia: 17.09.2003 (86) Data i numer zgłoszenia międzynarodowego:
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 212673 (21) Numer zgłoszenia: 374660 (22) Data zgłoszenia: 17.09.2003 (86) Data i numer zgłoszenia międzynarodowego:
urządzenia BLIX POWER do sieci. Urządzenie podłączane jest równolegle do
 Urządzenie BLIX POWER służy do oszczędzania energii elektrycznej w obwodach jedno i trójfazowych. W urządzeniu zastosowano szereg rozwiązań technologicznych, aby zapewnić jak najlepszą efektywność działania
Urządzenie BLIX POWER służy do oszczędzania energii elektrycznej w obwodach jedno i trójfazowych. W urządzeniu zastosowano szereg rozwiązań technologicznych, aby zapewnić jak najlepszą efektywność działania
PL B1. Mechanizm obrotu i blokowania platformy nadwozia wagonu kolejowego do transportu kombinowanego
 PL 219643 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219643 (13) B1 (21) Numer zgłoszenia: 395135 (51) Int.Cl. B61D 3/18 (2006.01) B61D 47/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 219643 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219643 (13) B1 (21) Numer zgłoszenia: 395135 (51) Int.Cl. B61D 3/18 (2006.01) B61D 47/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
SQL35.00 SQL85.00 SQL36E65 SQL36E110. Siłowniki elektryczne. Siemens Building Technologies HVAC Products. do klap odcinających VKF46...
 4 505 SQL35.00 Siłowniki elektryczne do klap odcinających VKF46... SQL35.00 SQL35..., SQL36E... napięcie zasilania 230 V AC, 3-stawny sygnał sterujący SQL85... napięcie zasilania 24 V AC, 3-stawny sygnał
4 505 SQL35.00 Siłowniki elektryczne do klap odcinających VKF46... SQL35.00 SQL35..., SQL36E... napięcie zasilania 230 V AC, 3-stawny sygnał sterujący SQL85... napięcie zasilania 24 V AC, 3-stawny sygnał
PL B1. INSTYTUT TECHNIKI BUDOWLANEJ, Warszawa, PL BUP 23/ WUP 05/18. WOJCIECH KUJAWSKI, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228990 (13) B1 (21) Numer zgłoszenia: 420412 (51) Int.Cl. G01N 3/32 (2006.01) G01N 3/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228990 (13) B1 (21) Numer zgłoszenia: 420412 (51) Int.Cl. G01N 3/32 (2006.01) G01N 3/56 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
TECH-AGRO B ę d z i n
 TECH-AGRO B ę d z i n TECH-AGRO Będzin Instrukcja obsługi Będzin, luty 2004 rok Spis treści: 1. Opis ogólny urządzenia...2 1. 1. Dane techniczne...2 1. 2. Obudowa i wygląd zewnętrzny...2 1. 3. Budowa
TECH-AGRO B ę d z i n TECH-AGRO Będzin Instrukcja obsługi Będzin, luty 2004 rok Spis treści: 1. Opis ogólny urządzenia...2 1. 1. Dane techniczne...2 1. 2. Obudowa i wygląd zewnętrzny...2 1. 3. Budowa
Gilotyna Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO RUCHOWA
 Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO Stron 7 Strona 1 Spis treści 1. Rysunek poglądowy maszyny 2 2. Podstawowe dane techniczne
Modele Q 11 2 x 1300 Q 11 2 x 2000 Q 11 2,5 x 1600 Q 11 3 x 1300 Q 11 4 x 2000 Q 11 4 x 2500 DOKUMENTACJA TECHNICZNO Stron 7 Strona 1 Spis treści 1. Rysunek poglądowy maszyny 2 2. Podstawowe dane techniczne
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV
 Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ
 KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Stanowisko pomiarowe do badania stanów przejściowych silnika krokowego
 Stanowisko pomiarowe do badania stanów przejściowych silnika krokowego 1. Specyfikacja...3 1.1. Przeznaczenie stanowiska...3 1.2. Parametry stanowiska...3 2. Elementy składowe...4 3. Obsługa...6 3.1. Uruchomienie...6
Stanowisko pomiarowe do badania stanów przejściowych silnika krokowego 1. Specyfikacja...3 1.1. Przeznaczenie stanowiska...3 1.2. Parametry stanowiska...3 2. Elementy składowe...4 3. Obsługa...6 3.1. Uruchomienie...6
3.5 Wyznaczanie stosunku e/m(e22)
") Wyznaczanie stosunku e/m(e) 157 3.5 Wyznaczanie stosunku e/m(e) Celem ćwiczenia jest wyznaczenie stosunku ładunku e do masy m elektronu metodą badania odchylenia wiązki elektronów w poprzecznym polu magnetycznym.
Wyznaczanie stosunku e/m(e) 157 3.5 Wyznaczanie stosunku e/m(e) Celem ćwiczenia jest wyznaczenie stosunku ładunku e do masy m elektronu metodą badania odchylenia wiązki elektronów w poprzecznym polu magnetycznym.
CSMIO-ENC. Moduł do gwintowania. Rev 1.1. copyright 2012 CS-Lab s.c.
 CSMIO-ENC Moduł do gwintowania Rev 1.1 copyright 2012 CS-Lab s.c. Spis treści 1. Informacje ogólne... 3 1.1 Oznaczenia używane w niniejszej instrukcji... 3 1.2 Zgodność z normami... 3 2. Złącze sygnałów
CSMIO-ENC Moduł do gwintowania Rev 1.1 copyright 2012 CS-Lab s.c. Spis treści 1. Informacje ogólne... 3 1.1 Oznaczenia używane w niniejszej instrukcji... 3 1.2 Zgodność z normami... 3 2. Złącze sygnałów
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Karta charakterystyki online SEM90-HN050AK22 SES/SEM90 OBROTOWE SYSTEMY SPRZĘŻENIA ZWROTNEGO HIPERFACE
 Karta charakterystyki online SEM90-HN050K22 SES/SEM90 B C D E F H I J K L M N O P Q R S T Rysunek może się różnić Szczegółowe dane techniczne Wydajność Informacje do zamówienia Typ Więcej wersji urządzeń
Karta charakterystyki online SEM90-HN050K22 SES/SEM90 B C D E F H I J K L M N O P Q R S T Rysunek może się różnić Szczegółowe dane techniczne Wydajność Informacje do zamówienia Typ Więcej wersji urządzeń
PL 214324 B1. SMAY SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Kraków, PL 02.08.2010 BUP 16/10. JAROSŁAW WICHE, Kraków, PL 31.07.
 PL 214324 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214324 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387102 (22) Data zgłoszenia: 23.01.2009 (51) Int.Cl.
PL 214324 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214324 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387102 (22) Data zgłoszenia: 23.01.2009 (51) Int.Cl.
Lista zadań nr 5 Ruch po okręgu (1h)
") Lista zadań nr 5 Ruch po okręgu (1h) Pseudo siły ruch po okręgu Zad. 5.1 Na cząstkę o masie 2 kg znajdującą się w punkcie R=5i+7j działa siła F=3i+4j. Wyznacz moment siły względem początku układu współrzędnych.
Lista zadań nr 5 Ruch po okręgu (1h) Pseudo siły ruch po okręgu Zad. 5.1 Na cząstkę o masie 2 kg znajdującą się w punkcie R=5i+7j działa siła F=3i+4j. Wyznacz moment siły względem początku układu współrzędnych.
ARKUSZ ZAMÓWIEŃ Bramy przemysłowe zwijane Aluprof BPR - na konsolach stałych typu KNS - na konsolach jezdnych typu KNJ
 ARKUSZ ZAMÓWIEŃ Bramy przemysłowe zwijane Aluprof BPR - - - 1 - Treść zawarta w dokumentacji podlega ochronie zgodnie z ustawą z dnia 4 lutego 1994 r. o prawie autorskim i prawach pokrewnych (Dz. U. z
ARKUSZ ZAMÓWIEŃ Bramy przemysłowe zwijane Aluprof BPR - - - 1 - Treść zawarta w dokumentacji podlega ochronie zgodnie z ustawą z dnia 4 lutego 1994 r. o prawie autorskim i prawach pokrewnych (Dz. U. z
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
Laboratorium Analogowych Układów Elektronicznych Laboratorium 6
 Laboratorium Analogowych Układów Elektronicznych Laboratorium 6 1/5 Stabilizator liniowy Zadaniem jest budowa i przebadanie działania bardzo prostego stabilizatora liniowego. 1. W ćwiczeniu wykorzystywany
Laboratorium Analogowych Układów Elektronicznych Laboratorium 6 1/5 Stabilizator liniowy Zadaniem jest budowa i przebadanie działania bardzo prostego stabilizatora liniowego. 1. W ćwiczeniu wykorzystywany
Silnik prądu stałego. Sterowanie silnika prądu stałego
 Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
STUDENCKIE KOŁO NAUKOWE CHIP
 STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
Politechnika Łódzka. Instytut Systemów Inżynierii Elektrycznej
 Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium komputerowych systemów pomiarowych Ćwiczenie 8 Wykorzystanie modułów FieldPoint w komputerowych systemach pomiarowych 1. Wprowadzenie
Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium komputerowych systemów pomiarowych Ćwiczenie 8 Wykorzystanie modułów FieldPoint w komputerowych systemach pomiarowych 1. Wprowadzenie
PL B1. ADAPTRONICA SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Łomianki k. Warszawy, PL BUP 20/10
 PL 214845 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214845 (13) B1 (21) Numer zgłoszenia: 387534 (51) Int.Cl. F16F 9/50 (2006.01) F16F 9/508 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 214845 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214845 (13) B1 (21) Numer zgłoszenia: 387534 (51) Int.Cl. F16F 9/50 (2006.01) F16F 9/508 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Seria VKP. Seria VKPI
 WENTYLATORY DO SYSTEMÓW PROSTOKĄTNYCH I Kanałowy wentylator odśrodkowy do prostokątnych kanałów wentylacyjnych w obudowie z ocynkowanej stali. Modele I posiadają dodatkowo izolację akustyczną i termiczną
WENTYLATORY DO SYSTEMÓW PROSTOKĄTNYCH I Kanałowy wentylator odśrodkowy do prostokątnych kanałów wentylacyjnych w obudowie z ocynkowanej stali. Modele I posiadają dodatkowo izolację akustyczną i termiczną
INSTRUKCJA BEZOBSŁUGOWYCH ODWILŻACZY DO TRANSFORMATORÓW Z KONSEWATOREM
 INSTRUKCJA BEZOBSŁUGOWYCH ODWILŻACZY DO TRANSFORMATORÓW Z KONSEWATOREM ENERGEM-INSTRUKCJA OBSŁUGI ODWILŻACZA BEZOBSŁUGOWEGO - STR. 1 1.1 Cel instrukcji Celem instrukcji jest zapoznanie użytkownika z obsługą
INSTRUKCJA BEZOBSŁUGOWYCH ODWILŻACZY DO TRANSFORMATORÓW Z KONSEWATOREM ENERGEM-INSTRUKCJA OBSŁUGI ODWILŻACZA BEZOBSŁUGOWEGO - STR. 1 1.1 Cel instrukcji Celem instrukcji jest zapoznanie użytkownika z obsługą
Lokalizacja robota Lego Mindstorms NXT przy użyciu odometrii
 Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laoratorium Sterowania Rootów Lokalizacja roota Lego Mindstorms NXT przy użyciu odometrii Uwagi wstępne 1. Wszystkie przykłady i
Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Laoratorium Sterowania Rootów Lokalizacja roota Lego Mindstorms NXT przy użyciu odometrii Uwagi wstępne 1. Wszystkie przykłady i
RZECZPOSPOLITAPOLSKA (12)OPIS PATENTOWY (19)PL (11) (13)B1
OPIS PATENTOWY (19)PL (11) (13)B1") RZECZPOSPOLITAPOLSKA (12)OPIS PATENTOWY (19)PL (11)177192 (13)B1 (21)Numer zgłoszenia: 309529 Urząd Patentowy (22)Data Zgłoszenia: 0 4.07.1995 Rzeczypospolitej Polskiej (51) IntCl6. G 0 1N 3/56 G01N 19/02
RZECZPOSPOLITAPOLSKA (12)OPIS PATENTOWY (19)PL (11)177192 (13)B1 (21)Numer zgłoszenia: 309529 Urząd Patentowy (22)Data Zgłoszenia: 0 4.07.1995 Rzeczypospolitej Polskiej (51) IntCl6. G 0 1N 3/56 G01N 19/02
Wyznaczanie momentu bezwładności wirników maszyn elektrycznych
 Wyznaczanie momentu bezwładności wirników maszyn elektrycznych Zakres ćwiczenia 1) Pomiar momentu bezwładności metodą drgań skrętnych Należy wyznaczyć moment bezwładności wirnika z klatką aluminiową; Wybrane
Wyznaczanie momentu bezwładności wirników maszyn elektrycznych Zakres ćwiczenia 1) Pomiar momentu bezwładności metodą drgań skrętnych Należy wyznaczyć moment bezwładności wirnika z klatką aluminiową; Wybrane
Bezczujnikowe sterowanie SPMSM
 XLV SESJA STUDENCKICH KÓŁ NAUKOWYCH KOŁO NAUKOWE MAGNESIK Bezczujnikowe sterowanie SPMSM ] Wykonał: Miłosz Handzel Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. n. AGH PMSM (ys. 1) kontra IM
XLV SESJA STUDENCKICH KÓŁ NAUKOWYCH KOŁO NAUKOWE MAGNESIK Bezczujnikowe sterowanie SPMSM ] Wykonał: Miłosz Handzel Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. n. AGH PMSM (ys. 1) kontra IM
l2^ OPIS OCHRONNY PL 60066
 EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej l2^ OPIS OCHRONNY PL 60066 WZORU UŻYTKOWEGO (2n Numer zgłoszenia: 110342 @ Data zgłoszenia: 01.12.1999 Y1 @ Intel7:
EGZEMPLARZ ARCHIWALNY RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej l2^ OPIS OCHRONNY PL 60066 WZORU UŻYTKOWEGO (2n Numer zgłoszenia: 110342 @ Data zgłoszenia: 01.12.1999 Y1 @ Intel7:
WZORU UŻYTKOWEGO q yi f2n Numer zgłoszenia: 105037
 RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej E6ZEMPURZ ARCfffw"' ^ OPIS OCHRONNY PL 58542 WZORU UŻYTKOWEGO q yi f2n Numer zgłoszenia: 105037 Data zgłoszenia: 17.07.1996 Intel7: G01N
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej E6ZEMPURZ ARCfffw"' ^ OPIS OCHRONNY PL 58542 WZORU UŻYTKOWEGO q yi f2n Numer zgłoszenia: 105037 Data zgłoszenia: 17.07.1996 Intel7: G01N
1. POMIAR SIŁY HAMOWANIA NA STANOWISKU ROLKOWYM
 1. POMIAR SIŁY HAMOWANIA NA STANOWISKU ROLKOWYM 1.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP obowiązujących w Laboratorium
1. POMIAR SIŁY HAMOWANIA NA STANOWISKU ROLKOWYM 1.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP obowiązujących w Laboratorium
NIEZBĘDNY SPRZĘT LABORATORYJNY
 Temat: Układ przełączający. Cel ćwiczenia Ćwiczenie 15 Poznanie zasady pracy tranzystorowego układu przełączającego. Pomiar prądu kolektorowego, gdy tranzystor jest w stanach włączenia i wyłączenia. Czytanie
Temat: Układ przełączający. Cel ćwiczenia Ćwiczenie 15 Poznanie zasady pracy tranzystorowego układu przełączającego. Pomiar prądu kolektorowego, gdy tranzystor jest w stanach włączenia i wyłączenia. Czytanie
SPRAWDZIAN NR Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową.
 SPRAWDZIAN NR 1 IMIĘ I NAZWISKO: KLASA: GRUPA A 1. Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową. Zaznacz poprawne dokończenie zdania. Siłę powodującą ruch Merkurego wokół Słońca
SPRAWDZIAN NR 1 IMIĘ I NAZWISKO: KLASA: GRUPA A 1. Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową. Zaznacz poprawne dokończenie zdania. Siłę powodującą ruch Merkurego wokół Słońca
Odczyt bloku wartości mierzonych. Audi TT 1999> - Automatyczna skrzynia biegów 09G. Sygnały wyjściowe:
 Odczyt bloku wartości mierzonych Audi TT 1999> - Automatyczna skrzynia biegów 09G Mogą być pokazane następujące bloki wartości mierzonych: Sygnały wyjściowe: Grupa wskazań 001: Pole wskazań 1: liczba obrotów
Odczyt bloku wartości mierzonych Audi TT 1999> - Automatyczna skrzynia biegów 09G Mogą być pokazane następujące bloki wartości mierzonych: Sygnały wyjściowe: Grupa wskazań 001: Pole wskazań 1: liczba obrotów
CENTRUM OBRÓBKI I CIĘCIA PROFILI PCV
 CENTRUM OBRÓBKI I CIĘCIA PROFILI PCV SBA 2 Wydajność: 120 jednostek/8godzin SBA 4 Highspeed Wydajność: 240 jednostek/8godzin Centrum obróbki i cięcia profili PCV Haffner SBA 2 Wydajność 120-140 jednostek
CENTRUM OBRÓBKI I CIĘCIA PROFILI PCV SBA 2 Wydajność: 120 jednostek/8godzin SBA 4 Highspeed Wydajność: 240 jednostek/8godzin Centrum obróbki i cięcia profili PCV Haffner SBA 2 Wydajność 120-140 jednostek
PL 175488 B1 (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1. (22) Data zgłoszenia: 08.12.1994
 OPIS PATENTOWY (19) PL (11) 175488 (13) B1. (22) Data zgłoszenia: 08.12.1994") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306167 (22) Data zgłoszenia: 08.12.1994 (51) IntCl6: G01K 13/00 G01C
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306167 (22) Data zgłoszenia: 08.12.1994 (51) IntCl6: G01K 13/00 G01C
Nazwa firmy: Autor: Telefon: Dane:
 Pozycja Ilość Opis 1 SEG.4.9.2.5B Nr katalogowy: 9675897 Pompy zatapialne SEG z poziomym króćcem tłocznym są przeznaczone do tłoczenia wody zanieczyszczonej z toalet. Pompy SEG wyposażone są w system rozdrabniający,
Pozycja Ilość Opis 1 SEG.4.9.2.5B Nr katalogowy: 9675897 Pompy zatapialne SEG z poziomym króćcem tłocznym są przeznaczone do tłoczenia wody zanieczyszczonej z toalet. Pompy SEG wyposażone są w system rozdrabniający,
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
ALGORYTMY STEROWANIA IMITATOREM STACJI RADIOLOKACYJNEJ
 Dr inż. Stanisław ŻYGADŁO Dr inż. Maciej PODCIECHOWSKI Inż. Michał JANKOWSKI Wojskowa Akademia Techniczna ALGORYTMY STEROWANIA IMITATOREM STACJI RADIOLOKACYJNEJ Streszczenie: W referacie przedstawiono
Dr inż. Stanisław ŻYGADŁO Dr inż. Maciej PODCIECHOWSKI Inż. Michał JANKOWSKI Wojskowa Akademia Techniczna ALGORYTMY STEROWANIA IMITATOREM STACJI RADIOLOKACYJNEJ Streszczenie: W referacie przedstawiono
Iskrobezpieczny czujnik prędkości ICP-1 INSTRUKCJA OBSŁUGI NR BP/IO/17/15
 Iskrobezpieczny czujnik prędkości ICP-1 INSTRUKCJA OBSŁUGI NR BP/IO/17/15 POLSKA Sp. z o.o. 43-100 Tychy, ul. Murarska 28 tel/fax: (0048 32) 327 14 59 0048 32 326 44 00 0048 32 326 44 03 Maj 2015r. Iskrobezpieczny
Iskrobezpieczny czujnik prędkości ICP-1 INSTRUKCJA OBSŁUGI NR BP/IO/17/15 POLSKA Sp. z o.o. 43-100 Tychy, ul. Murarska 28 tel/fax: (0048 32) 327 14 59 0048 32 326 44 00 0048 32 326 44 03 Maj 2015r. Iskrobezpieczny
d J m m dt model maszyny prądu stałego
 model maszyny prądu stałego dit ut itr t Lt E u dt E c d J m m dt m e 0 m c i. O wartości wzbudzenia decyduje prąd wzbudzenia zmienną sterująca strumieniem jest i, 2. O wartości momentu decyduje prąd twornika
model maszyny prądu stałego dit ut itr t Lt E u dt E c d J m m dt m e 0 m c i. O wartości wzbudzenia decyduje prąd wzbudzenia zmienną sterująca strumieniem jest i, 2. O wartości momentu decyduje prąd twornika
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
5 05: OBWODY ELEKTRYCZNE UKŁADÓW ROZRUCHU I ZASILANIA SILNIKA SPALINOWEGO, WYKONYWANIE POMIARÓW I OCENA STANU TECHNICZNEGO.
 Dwiczenie nr 5 Temat 05: OBWODY ELEKTRYCZNE UKŁADÓW ROZRUCHU I ZASILANIA SILNIKA SPALINOWEGO, WYKONYWANIE POMIARÓW I OCENA STANU TECHNICZNEGO. Cel: Pomiar elektryczny obwodu niskiego i wysokiego napięcia
Dwiczenie nr 5 Temat 05: OBWODY ELEKTRYCZNE UKŁADÓW ROZRUCHU I ZASILANIA SILNIKA SPALINOWEGO, WYKONYWANIE POMIARÓW I OCENA STANU TECHNICZNEGO. Cel: Pomiar elektryczny obwodu niskiego i wysokiego napięcia
Audi A3 2004> - Automatyczna skrzynia biegów 09G Audi A3 USA 2006> - Automatyczna skrzynia biegów 09G
 Odczyt bloku wartości mierzonych Audi A3 2004> - Automatyczna skrzynia biegów 09G Audi A3 USA 2006> - Automatyczna skrzynia biegów 09G Mogą być pokazane następujące bloki wartości mierzonych: Grupa wskazań
Odczyt bloku wartości mierzonych Audi A3 2004> - Automatyczna skrzynia biegów 09G Audi A3 USA 2006> - Automatyczna skrzynia biegów 09G Mogą być pokazane następujące bloki wartości mierzonych: Grupa wskazań
MOBOT RoboSnake. Moduł wieloczłonowego robota
 MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
Polskie listwy rolkowe
 Polskie listwy rolkowe www.listwy-rolkowe.pl Zastosowanie listew: w przenośnikach grawitacyjnych w połączeniach między urządzeniami w magazynach buforowych (FIFO) w terminalach przeładunkowych w sortowniach
Polskie listwy rolkowe www.listwy-rolkowe.pl Zastosowanie listew: w przenośnikach grawitacyjnych w połączeniach między urządzeniami w magazynach buforowych (FIFO) w terminalach przeładunkowych w sortowniach
Ćw. nr 31. Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2
 1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Opis ćwiczenia. Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Henry ego Katera.
 ĆWICZENIE WYZNACZANIE PRZYSPIESZENIA ZIEMSKIEGO ZA POMOCĄ WAHADŁA REWERSYJNEGO Opis ćwiczenia Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
ĆWICZENIE WYZNACZANIE PRZYSPIESZENIA ZIEMSKIEGO ZA POMOCĄ WAHADŁA REWERSYJNEGO Opis ćwiczenia Cel ćwiczenia Poznanie budowy i zrozumienie istoty pomiaru przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
Rotor RAS
 Rotor RAS e-mail: spid@alpha.pl www.spid.alpha.pl OPIS Rotor RAS jest rotorem o dużej wytrzymałości, zaprojektowanym do obracania dużych anten satelitarnych, dostarczanym wraz z elektronicznym modułem
Rotor RAS e-mail: spid@alpha.pl www.spid.alpha.pl OPIS Rotor RAS jest rotorem o dużej wytrzymałości, zaprojektowanym do obracania dużych anten satelitarnych, dostarczanym wraz z elektronicznym modułem
Safety Integrated dla napędów. Funkcje bezpieczeństwa zintegrowane w napędach Sinamics S120
 Safety Integrated dla napędów bezpieczeństwa zintegrowane w napędach Sinamics S120 Safety Integrated dla napędów : Przegląd bezpieczeństwa dla napędów zgodne z IEC 61800-5-2 Sterowanie przez zaciski EP
Safety Integrated dla napędów bezpieczeństwa zintegrowane w napędach Sinamics S120 Safety Integrated dla napędów : Przegląd bezpieczeństwa dla napędów zgodne z IEC 61800-5-2 Sterowanie przez zaciski EP
AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO
 ĆWICZENIE LABORATORYJNE AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO Wersja: 2013-07-27-1- 1.1. Cel ćwiczenia Celem ćwiczenia jest samodzielna
ĆWICZENIE LABORATORYJNE AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO Wersja: 2013-07-27-1- 1.1. Cel ćwiczenia Celem ćwiczenia jest samodzielna
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
m OPIS OCHRONNY PL 59532
 RZECZPOSPOLITA POLSKA EGZEMPLARZ ARCHIWALNY m OPIS OCHRONNY PL 59532 WZORU UŻYTKOWEGO (2n Numer zgłoszenia: 107693 13) Y1 5i) Intel7: Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 19.02.1998
RZECZPOSPOLITA POLSKA EGZEMPLARZ ARCHIWALNY m OPIS OCHRONNY PL 59532 WZORU UŻYTKOWEGO (2n Numer zgłoszenia: 107693 13) Y1 5i) Intel7: Urząd Patentowy Rzeczypospolitej Polskiej @ Data zgłoszenia: 19.02.1998
WZORU UŻYTKOWEGO PL Y1 B62K 5/04 ( ) Gębski Paweł, Warszawa, PL BUP 17/08. Paweł Gębski, Warszawa, PL
 Gębski Paweł, Warszawa, PL BUP 17/08. Paweł Gębski, Warszawa, PL") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116619 (22) Data zgłoszenia: 07.02.2007 (19) PL (11) 64368 (13) Y1 (51) Int.Cl.
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 116619 (22) Data zgłoszenia: 07.02.2007 (19) PL (11) 64368 (13) Y1 (51) Int.Cl.
PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI
 Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 01/18. WIESŁAW FIEBIG, Wrocław, PL WUP 08/18 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229701 (13) B1 (21) Numer zgłoszenia: 419686 (51) Int.Cl. F16F 15/24 (2006.01) F03G 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229701 (13) B1 (21) Numer zgłoszenia: 419686 (51) Int.Cl. F16F 15/24 (2006.01) F03G 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Karta charakterystyki online DKV60-E1K00020 DKV60 ENKODER Z KOŁEM POMIAROWYM
 Karta charakterystyki online DKV60-E1K00020 DKV60 A B C D E F H I J K L M N O P Q R S T Rysunek może się różnić Szczegółowe dane techniczne Wydajność Informacje do zamówienia Typ Więcej wersji urządzeń
Karta charakterystyki online DKV60-E1K00020 DKV60 A B C D E F H I J K L M N O P Q R S T Rysunek może się różnić Szczegółowe dane techniczne Wydajność Informacje do zamówienia Typ Więcej wersji urządzeń
Efekt Halla. Cel ćwiczenia. Wstęp. Celem ćwiczenia jest zbadanie efektu Halla. Siła Loretza
 Efekt Halla Cel ćwiczenia Celem ćwiczenia jest zbadanie efektu Halla. Wstęp Siła Loretza Na ładunek elektryczny poruszający się w polu magnetycznym w kierunku prostopadłym do linii pola magnetycznego działa
Efekt Halla Cel ćwiczenia Celem ćwiczenia jest zbadanie efektu Halla. Wstęp Siła Loretza Na ładunek elektryczny poruszający się w polu magnetycznym w kierunku prostopadłym do linii pola magnetycznego działa
Nadajnik położenia przełącznika zaczepów
 Nadajnik położenia przełącznika zaczepów 1. ZASTOSOWANIE Nadajnik NPPZ-1 wysyła informacje o aktualnym położeniu przełącznika zaczepów transformatora. Nadajnik jest sprzężony mechanicznie z przełącznikiem
Nadajnik położenia przełącznika zaczepów 1. ZASTOSOWANIE Nadajnik NPPZ-1 wysyła informacje o aktualnym położeniu przełącznika zaczepów transformatora. Nadajnik jest sprzężony mechanicznie z przełącznikiem
(86) Data i numer zgłoszenia międzynarodowego: , PCT/FR95/00114
 Data i numer zgłoszenia międzynarodowego: , PCT/FR95/00114") R Z E C Z PO SPO L IT A PO LSK A (12) OPIS PATENTOWY (19) PL (11) 176422 (13) B1 (21) Numer zgłoszenia: 315663 U rząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 01.02.1995 (86) Data i numer
R Z E C Z PO SPO L IT A PO LSK A (12) OPIS PATENTOWY (19) PL (11) 176422 (13) B1 (21) Numer zgłoszenia: 315663 U rząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 01.02.1995 (86) Data i numer
Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego (Katera)
") Politechnika Łódzka FTMS Kierunek: nformatyka rok akademicki: 2008/2009 sem. 2. Termin: 6 V 2009 Nr. ćwiczenia: 112 Temat ćwiczenia: Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
Politechnika Łódzka FTMS Kierunek: nformatyka rok akademicki: 2008/2009 sem. 2. Termin: 6 V 2009 Nr. ćwiczenia: 112 Temat ćwiczenia: Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego