MCAR Robot mobilny z procesorem AVR Atmega32
|
|
|
- Konrad Kołodziejczyk
- 9 lat temu
- Przeglądów:
Transkrypt
1 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, Dęblin jkurylo92@gmail.com 1

2 Spis treści 1. Wstęp Opis elektroniki Układ zasilania Układ sterowania silnikami DC Układ sterowania silnikiem krokowym Wyświetlacz Czujnik Pomiar napięcia baterii Spis połączeń pinów mikrokontrolera Atmega Opis działania robota 9 4. Zdjęcia. 9 2

3 1. Wstęp Robot MCAR jest to pojazd autonomiczny oparty na podwoziu samochodu elektrycznego (zabawki zdalnie sterowanej) sterowany za pomocą mikrokontrolera AVR Atmega 32. Czujnikiem badającym otoczenie przed pojazdem jest Sharp GP2D120 mierzący odległość od przedmiotu w zakresie od 4 do 30 cm. Czujnik został zamocowany na podstawie przytwierdzonej do silnika krokowego unipolarnego dzięki któremu możliwy jest pomiar w zakresie 180 o. Podwozie robota sterowane i napędzane jest za pomocą silników elektrycznych prądu stałego DC. Za sterowanie silnikami DC odpowiada mostek H w postaci ukaldu L293DNE, sterowanie silnikiem krokowym odbywa się bezpośrednio z mikrokontrolera poprzez układ ULN2003APG będący zestawem 7 tranzystorów NPN w układzie Darlingtona. Procesorem całego układu jest mikrokontroler Atmega32 taktowany wewnętrznym oscylatorem 4MHz. Posiada on 32kB pamięci flash przechowującej program, 1024 Bity pamięci EEPROM i 2kB pamięci SRAM. Dodatkowo zawiera 8 kanałów 10 bitowych analogowo cyfrowego konwertera (ADC), 4 kanały PWM (Modulacji szerokości impulsu). Powyżej wypisane cechy mikrokontrolera,w głównej mierze ilość pamięci flash i duża liczba wyjść programowalnych zadecydowały o wybore tego, a nie innego mikrokontrolera. Elektronika zasilana jest napięciem stałym +5V podawanym z dwóch stabilizatorów: LM78S05 o wydajności prądowej do 2A zasilającym silniki sterowania i napędu jak i silnik krokowy, 78M05CDT o wydajnośći prądowej do 0,5 A zasilającym elektronikę sterującą: procesor, czujnik, układy sterujące silnikami. Źródłem zasilania jest pakiet 6 akumulatorków o łącznej pojemności 1,3Ah i napięciu 7,2V. 3

4 2. Opis elektroniki 2.1 Układ zasilania Układ zasilania oparty jest na 2 stabilizatorach napięcia: LM78S50 i 78M05CDT, stabilizujących napięcie do wartości +/- 5V. Na wejściu jak i wyjściu układów znajduje się zestaw kondensatorów wygładających napięcie dla uniknięcia skoków napięcia co w efekcie mogło by prowadzić do restartowania procesora. Źródło zasilania podłączane jest do wejścia ZAS+ i ZAS-. Wyjście PWR2 jest doprowadzone bezpośrednio do układów sterowania silnikami. Wyjście VCC zasila układy logiczne i czujnik odległości. 2.2 Układ sterowania silnikami DC Sterowanie silnikami prądu stałego odbywa się za pośrednictwem mostka H, układu L293DNE. Układ ten posiada 3 punkty zasilające logikę układu podłączone do wyjścia VCC ukłądu zasilania i jeden punkt zasilania silników podłączony do PWR2 wyjścia ukałdu zasilania. Cztery wyjścia 1Y, 2Y, 3Y, 4Y słóżą do podłączenia silników DC. Wejścia 1A, 4A słóżą do sterowania. Podanie napięcia na jedo wyjście z pary (para: 1A z 2A i druga 3A z 4A) powoduje uruchomienie silnika (M1/M2) w określonym kierunku. Pozostałe 4 punkty GND to masa układu L293DNE. 4

5 2.3 Układ sterowania silnikiem krokowym Sterowanie silnika krokowego unipolarnego polega na sekwencyjnym podawaniu napięcia na wszystkie 4 cewki silnika. Układ ULN2003APG ma za zadanie podawać napięcie z PWR2 układu zasilania na odpowiednie cewki poprzez sterowania mikrokontrolerem. Jest to rozwiązanie powrzechnie stosowane ze względu na małą wydajność prądową portów I/O mikrokontrolera. 2.4 Wyświetlacz Wyświetlacz 2x16 znaków zastosowany w pojeździe ma za zadanie reprezentację wyników odczytu czujnika i innych danych potrzebnych w procesie projektowania oprogramowania dla procesora. Wyświetlacz podłączony jest do 6 wyjść procesora. Wejścia wyświetlazcza to: E (enable) uruchomienie wyświetlacza, RS komunikacja z procesorem wyświetlacza, D4 D7 linie danych. Dodatkowo został umieszczony potencjometr 10kOhm słóżący do regulowania kontrastu wyświetlacza. 5

6 2.5 Czujnik Czujnik dokonujący pomiaru odległości od przeszkody Sharp GP2D120 posiada 3 piny podłączeniowe: 1 VCC (zasilanie), 2 GND (masa), 3 VO (Voltage Output, napięcie wyjściowe). Wyjście VO jest podłączone bezpośrednio do portu ADC procesora. 2.6 Pomiar napięcia baterii Elektronika robota została wyposażona w układ monitorujący napiecie baterii. Jest to rezystorowy dzielnik napięcia przez 10. Podłązcony bezpośrednio do PWR1. 6

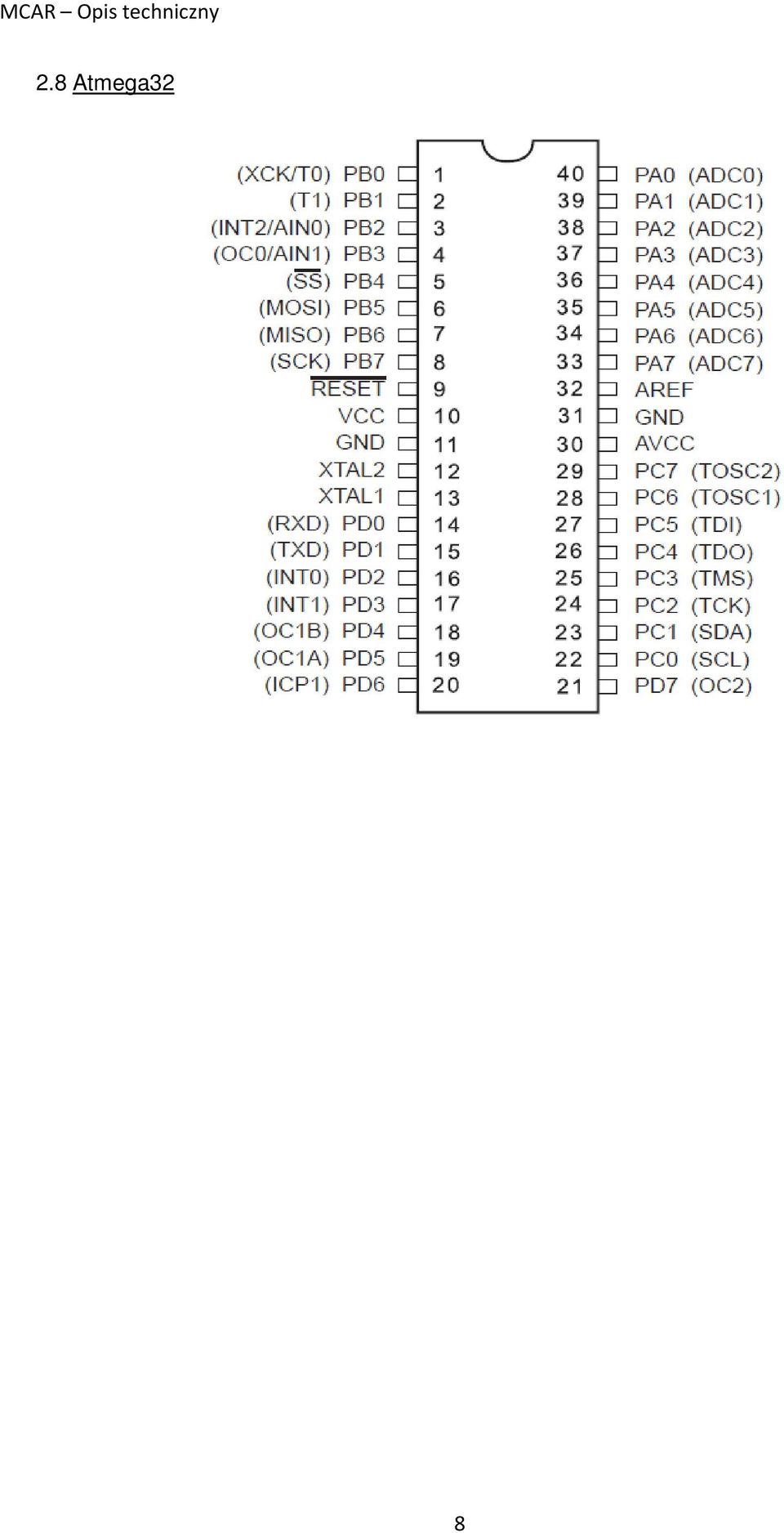
7 2.7 Spis połączeń pinów mikrokontrolera. Lp. Nazwa pinu Połączony z 1 PA0 DB7 wyświetlacza 2 PA1 DB6 wyświetlacza 3 PA2 DB5 wyświetlacza 4 PA3 Czujnik SHARP 5 PA4 Czujnik 1 - gniazdo 6 PA5 Czujnik 2 gniazdo 7 PA6 Czujnik 3 gniazdo 8 PA7 Dzielnik napięcia 9 PB0 RS wyświetlacza 10 PB1 E wyświetlacza 11 PB2 DB4 wyświetlacza 12 PB3 L293DNE 13 PB4 NC 14 PB5 Gniazdo programatora 15 PB6 Gniazdo programatora 16 PB7 Gniazdo programatora 17 PC0 NC 18 PC1 NC 19 PC2 NC 20 PC3 NC 21 PC4 ULN2003APG 22 PC5 ULN2003APG 23 PC6 ULN2003APG 24 PC7 ULN2003APG 25 PD0 Gniazdo transmisji danych 26 PD1 Gniazdo transmisji danych 27 PD2 NC 28 PD3 NC 29 PD4 L293DNE 30 PD5 L293DNE 31 PD6 NC 32 PD7 L293DNE *NC No Connection 7


8 2.8 Atmega32 8
9 3. Opis działania robota Czujnik sharp GP2D120 dokonuje pomiaru kąta odbicia wiązki światła od przedmiotu i zwraca na wyjściu sygnał analogowy w postaci napięcia w zakresie od 0,4 do 3V. Napięcie to, jest mierzone przez przetwornik analogowo cyfrowy ADC. Funkcja getadc() języka Bascom zwraca wartość typu Word gdzie przykładowo 8 to brak przeszkody, a 256 to przeszkoda na odległość ok. 10 cm od czujnika. Proram wsadowy mikrokontrolera posiada funkcję skanowanie() która wysyła kolejno w określonych odstępach czasu sygnały sterowania silnikiem krokowym na którym osadzony jest czujnik. Co 4 sygnały pobierana jest wartość zwracana przez czujnik i w ten sposób robot widzi z której strony i w jakiej odległości znajduje się przeszkoda. W zależności od dokonanego odczytu (skanu terenu) wykonywana jest jazda robota. Sterowanie prędkości robota odbywa się poprzez kanał PWM (kanał modulacji częstotliwości sygnału) na odpowiednie porty mikrokontrolera podawane jest napięcie o zmiennym wypełnieniu gdzie wartość 256 to 100% wypełnienie, a 128 to już 50% wypełnienia. Opracowany algorytm analizuje dane odebrane z czujnika i steruje jazdą robota. 4. Zdjęcia 9

10 Czujnik Sharp GP2D120 10

11 Płyta główna Mikrokontroler Atmega32 11

12 12

LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
Spis treści. Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
E-TRONIX Sterownik Uniwersalny SU 1.2
 Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
AVREVB1. Zestaw uruchomieniowy dla mikrokontrolerów AVR. Zestawy uruchomieniowe www.evboards.eu
 AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
Wyjścia analogowe w sterownikach, regulatorach
 Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Uniwersalny sterownik silnika krokowego z portem szeregowym RS232 z procesorem AT90S2313 na płycie E200. Zestaw do samodzielnego montażu.
 microkit E3 Uniwersalny sterownik silnika krokowego z portem szeregowym RS3 z procesorem AT90S33 na płycie E00. Zestaw do samodzielnego montażu..opis ogólny. Sterownik silnika krokowego przeznaczony jest
microkit E3 Uniwersalny sterownik silnika krokowego z portem szeregowym RS3 z procesorem AT90S33 na płycie E00. Zestaw do samodzielnego montażu..opis ogólny. Sterownik silnika krokowego przeznaczony jest
Zestaw Startowy EvB. Więcej informacji na stronie: http://and-tech.pl/zestaw-evb-5-1/
 Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
ZL2AVR. Zestaw uruchomieniowy z mikrokontrolerem ATmega8
 ZL2AVR Zestaw uruchomieniowy z mikrokontrolerem ATmega8 ZL2AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega8 (oraz innych w obudowie 28-wyprowadzeniowej). Dzięki wyposażeniu w
ZL2AVR Zestaw uruchomieniowy z mikrokontrolerem ATmega8 ZL2AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega8 (oraz innych w obudowie 28-wyprowadzeniowej). Dzięki wyposażeniu w
Elektrolityczny kondensator filtrujący zasilanie stabilizatora U12 po stronie sterującej
 Designator Part Type Description AM2 DC/DC QDC2WSIL 5V Przetwornica DC/DC 12V/5V zasilanie logiki AM3 DC/DC QDC2WSIL 5V Przetwornica DC/DC 12V/5V ujemne zasilanie drivera U23 Przetwornica DC/DC 12V/5V
Designator Part Type Description AM2 DC/DC QDC2WSIL 5V Przetwornica DC/DC 12V/5V zasilanie logiki AM3 DC/DC QDC2WSIL 5V Przetwornica DC/DC 12V/5V ujemne zasilanie drivera U23 Przetwornica DC/DC 12V/5V
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA
 WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
Robot mobilny klasy minisumo Wojak Wszechmocny. Robert Budziński
 Robot mobilny klasy minisumo Wojak Wszechmocny Robert Budziński Koło Naukowe Robotyków KoNaR" www.konar.pwr.wroc.pl Wrocław, 2008 Spis treści Od autora. 3 1. Wstęp... 4 2. Konstrukcja nośna.. 4 3. Układ
Robot mobilny klasy minisumo Wojak Wszechmocny Robert Budziński Koło Naukowe Robotyków KoNaR" www.konar.pwr.wroc.pl Wrocław, 2008 Spis treści Od autora. 3 1. Wstęp... 4 2. Konstrukcja nośna.. 4 3. Układ
2.1 Porównanie procesorów
 1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
ZL16AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168
 ZL16AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168 ZL16AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerówavr w obudowie 28-wyprowadzeniowej (ATmega8/48/88/168). Dzięki
ZL16AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168 ZL16AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerówavr w obudowie 28-wyprowadzeniowej (ATmega8/48/88/168). Dzięki
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Systemy Wbudowane. Arduino - rozszerzanie. Podłączanie wyświetlacza LCD. Podłączanie wyświetlacza LCD. Podłączanie wyświetlacza LCD
 Wymagania: V, GND Zasilanie LED podswietlenia (opcjonalne) Regulacja kontrastu (potencjometr) Enable Register Select R/W (LOW) bity szyny danych Systemy Wbudowane Arduino - rozszerzanie mgr inż. Marek
Wymagania: V, GND Zasilanie LED podswietlenia (opcjonalne) Regulacja kontrastu (potencjometr) Enable Register Select R/W (LOW) bity szyny danych Systemy Wbudowane Arduino - rozszerzanie mgr inż. Marek
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
ZL28ARM. Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC
 ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
MOBOT-MBv2-AVR Płyta główna robota mobilnego z procesorem AVR Atmega128
 Instrukcja obsługi MOBOT-MBv2-AVR Płyta główna robota mobilnego z procesorem AVR Atmega128 P.P.H. WObit E.K.J. Ober s.c. Dęborzyce 16, 62-045 Pniewy tel. 48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl
Instrukcja obsługi MOBOT-MBv2-AVR Płyta główna robota mobilnego z procesorem AVR Atmega128 P.P.H. WObit E.K.J. Ober s.c. Dęborzyce 16, 62-045 Pniewy tel. 48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
ZL8AVR. Płyta bazowa dla modułów dipavr
 ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
ZL27ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F103
 ZL27ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL27ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę zaawansowanych układów
ZL27ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL27ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę zaawansowanych układów
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Płytka laboratoryjna do współpracy z mikrokontrolerem MC68332
 Płytka laboratoryjna do współpracy z mikrokontrolerem MC68332 Jan Kędzierski Marek Wnuk Wrocław 2009 Spis treści 1 Wstęp 3 2 Opis płytki 3 3 Schematy płytki 7 2 1 Wstęp Płytka laboratoryjna opisywana w
Płytka laboratoryjna do współpracy z mikrokontrolerem MC68332 Jan Kędzierski Marek Wnuk Wrocław 2009 Spis treści 1 Wstęp 3 2 Opis płytki 3 3 Schematy płytki 7 2 1 Wstęp Płytka laboratoryjna opisywana w
W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM
 Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
KAmduino UNO. Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO
 Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO to płytka rozwojowa o funkcjonalności i wymiarach typowych dla Arduino UNO. Dzięki wbudowanemu mikrokontrolerowi ATmega328P i
Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO to płytka rozwojowa o funkcjonalności i wymiarach typowych dla Arduino UNO. Dzięki wbudowanemu mikrokontrolerowi ATmega328P i
AVR DRAGON. INSTRUKCJA OBSŁUGI (wersja 1.0)
") AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
Raport z budowy robota typu Linefollower Mały. Marcin Węgrzyn
 Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024
 Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024 Płytka idealna do nauki programowania mikrokontrolerów i szybkiego budowanie układów testowych. Posiada mikrokontroler ATmega16/ATmega32 i bogate
Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024 Płytka idealna do nauki programowania mikrokontrolerów i szybkiego budowanie układów testowych. Posiada mikrokontroler ATmega16/ATmega32 i bogate
KAmduino UNO. Rev Źródło:
 KAmduino UNO Rev. 20170811113756 Źródło: http://wiki.kamami.pl/index.php?title=kamduino_uno Spis treści Podstawowe cechy i parametry... 2 Wyposażenie standardowe... 3 Schemat elektryczny... 4 Mikrokontroler
KAmduino UNO Rev. 20170811113756 Źródło: http://wiki.kamami.pl/index.php?title=kamduino_uno Spis treści Podstawowe cechy i parametry... 2 Wyposażenie standardowe... 3 Schemat elektryczny... 4 Mikrokontroler
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR
 UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR zestaw UNO R3 Starter Kit zawiera: UNO R3 (Compatible Arduino) x1szt. płytka stykowa 830 pól x1szt. zestaw 75 sztuk kabli do płytek stykowych
UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR zestaw UNO R3 Starter Kit zawiera: UNO R3 (Compatible Arduino) x1szt. płytka stykowa 830 pól x1szt. zestaw 75 sztuk kabli do płytek stykowych
Robot Mobilny Mobot-Explorer
 Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
ZL9AVR. Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019)
 i ZL1ETH (RTL8019)") ZL9AVR Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019) ZL9AVR to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów związanych z zastosowaniem mikrokontrolerów AVR w aplikacjach
ZL9AVR Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019) ZL9AVR to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów związanych z zastosowaniem mikrokontrolerów AVR w aplikacjach
ZL29ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Projektowanie urządzeń mikroprocesorowych cz. 2 Wykład 4
 Projektowanie urządzeń mikroprocesorowych cz. 2 Wykład 4 Etapy projektowania Proste urządzenie mikroprocesorowe 2 Zasilanie mikrokontrolera W zależności od potrzeb można wykorzystać wariant podstawowy
Projektowanie urządzeń mikroprocesorowych cz. 2 Wykład 4 Etapy projektowania Proste urządzenie mikroprocesorowe 2 Zasilanie mikrokontrolera W zależności od potrzeb można wykorzystać wariant podstawowy
ZL5PIC. Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887
 ZL5PIC Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887 ZL5PIC jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów PIC16F887 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL5PIC Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887 ZL5PIC jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów PIC16F887 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Uczeń/Uczennica po zestawieniu połączeń zgłasza nauczycielowi gotowość do sprawdzenia układu i wszystkich połączeń.
 Nazwa implementacji: Termometr cyfrowy - pomiar temperatury z wizualizacją pomiaru na wyświetlaczu LCD Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania elementu zestawu modułu-interfejsu
Nazwa implementacji: Termometr cyfrowy - pomiar temperatury z wizualizacją pomiaru na wyświetlaczu LCD Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania elementu zestawu modułu-interfejsu
Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32. Instrukcja Obsługi. SKN Chip Kacper Cyrocki Page 1
 Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32 Instrukcja Obsługi SKN Chip Kacper Cyrocki Page 1 Spis treści Wstęp... 3 Wyposażenie płytki... 4 Zasilanie... 5 Programator... 6 Diody LED...
Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32 Instrukcja Obsługi SKN Chip Kacper Cyrocki Page 1 Spis treści Wstęp... 3 Wyposażenie płytki... 4 Zasilanie... 5 Programator... 6 Diody LED...
ISP ADAPTER. Instrukcja obsługi rev.1.1. Copyright 2009 SIBIT
 Instrukcja obsługi rev.1.1 Spis treści 1.Wprowadzenie... 3 2. Rozmieszczenie elementów...4 3. Opis wyprowadzeń złącza ISP...6 4. Zasilanie adaptera...7 5. Wybór źródła taktowania...8 6. Wybór programowanego
Instrukcja obsługi rev.1.1 Spis treści 1.Wprowadzenie... 3 2. Rozmieszczenie elementów...4 3. Opis wyprowadzeń złącza ISP...6 4. Zasilanie adaptera...7 5. Wybór źródła taktowania...8 6. Wybór programowanego
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Wejścia logiczne w regulatorach, sterownikach przemysłowych
 Wejścia logiczne w regulatorach, sterownikach przemysłowych Semestr zimowy 2013/2014, WIEiK PK 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika
Wejścia logiczne w regulatorach, sterownikach przemysłowych Semestr zimowy 2013/2014, WIEiK PK 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika
ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]
![ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]](/thumbs/92/108907590.jpg "ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]") ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych
 ZP/UR/46/203 Zał. nr a do siwz Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych Przedmiot zamówienia obejmuje następujące elementy: L.p. Nazwa Ilość. Zestawienie komputera
ZP/UR/46/203 Zał. nr a do siwz Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych Przedmiot zamówienia obejmuje następujące elementy: L.p. Nazwa Ilość. Zestawienie komputera
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1)
 Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1)") 20170513-1300 SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1) Skrócona instrukcja obsługi Od wersji oprogramowania 0.56 www.apautomatyka.pl
20170513-1300 SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1) Skrócona instrukcja obsługi Od wersji oprogramowania 0.56 www.apautomatyka.pl
Aoi Ryuu. v2.0 moduł z mikroprocesorem Atmega169 dla makiety dydaktycznej Akai Kaba
 Aoi Ryuu v.0 moduł z mikroprocesorem Atmega69 dla makiety dydaktycznej Akai Kaba Moduł mikroprocesorowy Aoi Ryuu v.0 jest przeznaczony do współpracy z makietą dydaktyczną Akai Kaba v.x. Wyposażony został
Aoi Ryuu v.0 moduł z mikroprocesorem Atmega69 dla makiety dydaktycznej Akai Kaba Moduł mikroprocesorowy Aoi Ryuu v.0 jest przeznaczony do współpracy z makietą dydaktyczną Akai Kaba v.x. Wyposażony został
HELMUT Robot klasy mini sumo
 HELMUT Robot klasy mini sumo Sprawozdanie z projektu Spis treści: 1. Opis projektu 2. Konstrukcja 3. Elektronika 4. Program 5. Wnioski, błędy i przemyślenia 1 Opis projektu. Celem projektu było zbudowanie
HELMUT Robot klasy mini sumo Sprawozdanie z projektu Spis treści: 1. Opis projektu 2. Konstrukcja 3. Elektronika 4. Program 5. Wnioski, błędy i przemyślenia 1 Opis projektu. Celem projektu było zbudowanie
ZL30ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F103
 ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
Instrukcja obsługi. SQCA244 instrukcja obsługi
 Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. PPH WObit
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. PPH WObit
Płyta uruchomieniowa EBX51
 Dariusz Kozak ZESTAW URUCHOMIENIOWY MIKROKOMPUTERÓW JEDNOUKŁADOWYCH MCS-51 ZUX51 Płyta uruchomieniowa EBX51 INSTRUKCJA OBSŁUGI Wszystkie prawa zastrzeżone Kopiowanie, powielanie i rozpowszechnianie w jakiejkolwiek
Dariusz Kozak ZESTAW URUCHOMIENIOWY MIKROKOMPUTERÓW JEDNOUKŁADOWYCH MCS-51 ZUX51 Płyta uruchomieniowa EBX51 INSTRUKCJA OBSŁUGI Wszystkie prawa zastrzeżone Kopiowanie, powielanie i rozpowszechnianie w jakiejkolwiek
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701. SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701.
 SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Systemy Wbudowane. Arduino dołączanie urządzeń Wersja Arduino bez płytki Arduino. Czyli... Eliminowanie modułu z projektu. Na płytce...
 Arduino bez płytki Arduino Kompletne Arduino Uno jest -x droższe od samego mikrokontrolera, Do danego układu niekoniecznie potrzebne są wszystkie oferowane przez moduł Arduino Uno urządzenia, np. Systemy
Arduino bez płytki Arduino Kompletne Arduino Uno jest -x droższe od samego mikrokontrolera, Do danego układu niekoniecznie potrzebne są wszystkie oferowane przez moduł Arduino Uno urządzenia, np. Systemy
INSTRUKCJA Płytka uruchomieniowa EvB 4.3
 INSTRUKCJA Płytka uruchomieniowa EvB 4.3 Instrukcja obsługi płytki uruchomieniowej EvB 4.3 Strona 1 Zawartość Wstęp... 3 Skład zestawu EvB 4.3... 4 Zasilanie... 5 Złącze programatora... 6 Port USB... 7
INSTRUKCJA Płytka uruchomieniowa EvB 4.3 Instrukcja obsługi płytki uruchomieniowej EvB 4.3 Strona 1 Zawartość Wstęp... 3 Skład zestawu EvB 4.3... 4 Zasilanie... 5 Złącze programatora... 6 Port USB... 7
MOBOT RoboSnake. Moduł wieloczłonowego robota
 MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
Raport z budowy robota Krzysio
 Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT,
 Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. P.P.H.
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. P.P.H.
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
2.1 Przesył danych między procesorem a tabelą zmiennych
 1 Wstęp...1 2 Jak aplikacja obsługuje procesory?...2 2.1 Przesył danych między procesorem a tabelą zmiennych...2 2.2 Polecenia wysyłane do procesorów...2 3 Podstawowe peryferia procesora HallChip...3 3.1
1 Wstęp...1 2 Jak aplikacja obsługuje procesory?...2 2.1 Przesył danych między procesorem a tabelą zmiennych...2 2.2 Polecenia wysyłane do procesorów...2 3 Podstawowe peryferia procesora HallChip...3 3.1
Politechnika Białostocka
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Kod przedmiotu: TS1C 622 388 Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Elektronika samochodowa Temat: Programowanie
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Kod przedmiotu: TS1C 622 388 Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Elektronika samochodowa Temat: Programowanie
LITEcomp. Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19
 LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu. Jakub Stanisz
 WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0)
") Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0) Spis treści 1.Informację ogólne...2 2.Podstawowe parametry...2 3.Wejścia / wyjścia...2 4.Schemat blokowy...5 5.Zegar czasu rzeczywistego...6
Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0) Spis treści 1.Informację ogólne...2 2.Podstawowe parametry...2 3.Wejścia / wyjścia...2 4.Schemat blokowy...5 5.Zegar czasu rzeczywistego...6
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu.
 Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO
 Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Szczegółowy Opis Przedmiotu Zamówienia- Część I
 Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
Notatka lekcja_#3_1; na podstawie W.Kapica 2017 Strona 1
 Na poprzednich zajęciach zajmowaliśmy się odczytywaniem sygnałów cyfrowych. Dzięki temu mogliśmy np.: sprawdzić, czy przycisk został wciśnięty. Świat, który nas otacza nie jest jednak cyfrowy, czasami
Na poprzednich zajęciach zajmowaliśmy się odczytywaniem sygnałów cyfrowych. Dzięki temu mogliśmy np.: sprawdzić, czy przycisk został wciśnięty. Świat, który nas otacza nie jest jednak cyfrowy, czasami
Porty wejścia/wyjścia w układach mikroprocesorowych i w mikrokontrolerach
 0-- Porty wejścia/wyjścia w układach mikroprocesorowych i w mikrokontrolerach Semestr zimowy 0/0, WIEiK-PK Porty wejścia-wyjścia Input/Output ports Podstawowy układ peryferyjny port wejścia-wyjścia do
0-- Porty wejścia/wyjścia w układach mikroprocesorowych i w mikrokontrolerach Semestr zimowy 0/0, WIEiK-PK Porty wejścia-wyjścia Input/Output ports Podstawowy układ peryferyjny port wejścia-wyjścia do
XXXII Olimpiada Wiedzy Elektrycznej i Elektronicznej. XXXII Olimpiada Wiedzy Elektrycznej i Elektronicznej
 Zestaw pytań finałowych numer : 1 1. Wzmacniacz prądu stałego: własności, podstawowe rozwiązania układowe 2. Cyfrowy układ sekwencyjny - schemat blokowy, sygnały wejściowe i wyjściowe, zasady syntezy 3.
Zestaw pytań finałowych numer : 1 1. Wzmacniacz prądu stałego: własności, podstawowe rozwiązania układowe 2. Cyfrowy układ sekwencyjny - schemat blokowy, sygnały wejściowe i wyjściowe, zasady syntezy 3.
INSTRUKCJA OBSŁUGI Generatora impulsów PWM
 INSTRUKCJA OBSŁUGI Generatora impulsów PWM Przeznaczeniem generatora jest sterowanie różnymi zaworami lub elementami indukcyjnymi jak przekaźniki, siłowniki i inne elementy wykonawcze sterowane napięciem
INSTRUKCJA OBSŁUGI Generatora impulsów PWM Przeznaczeniem generatora jest sterowanie różnymi zaworami lub elementami indukcyjnymi jak przekaźniki, siłowniki i inne elementy wykonawcze sterowane napięciem
Szczegółowy Opis Przedmiotu Zamówienia
 Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
MultiTool instrukcja użytkownika 2010 SFAR
 MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
Elektronika z wykorzystaniem Arduino i Raspberry Pi : receptury / Simon Monk. Gliwice, copyright Spis treści. Przedmowa 11
 Elektronika z wykorzystaniem Arduino i Raspberry Pi : receptury / Simon Monk. Gliwice, copyright 2018 Spis treści Przedmowa 11 1. Teoria 17 1.0. Wprowadzenie 17 1.1. Prąd 17 1.2. Napięcie 18 1.3. Wyliczanie
Elektronika z wykorzystaniem Arduino i Raspberry Pi : receptury / Simon Monk. Gliwice, copyright 2018 Spis treści Przedmowa 11 1. Teoria 17 1.0. Wprowadzenie 17 1.1. Prąd 17 1.2. Napięcie 18 1.3. Wyliczanie
Linefollower Torpeda. Magdalena Kaczorowska
 Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
Opis czytnika TRD-FLAT CLASSIC ver. 1.1. Naścienny czytnik transponderów UNIQUE w płaskiej obudowie
 TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
TRD-MINI COMBO. Uniwersalny moduł czytnika transponderów UNIQUE - wersja OEM. Podstawowe cechy :
 TRD-MINI COMBO Uniwersalny moduł czytnika transponderów UNIQUE - wersja OEM Podstawowe cechy : niewielkie rozmiary - 19 x 26 x 12 mm zasilanie od 3V do 6V 12 formatów danych wyjściowych tryb IDLE wyjście
TRD-MINI COMBO Uniwersalny moduł czytnika transponderów UNIQUE - wersja OEM Podstawowe cechy : niewielkie rozmiary - 19 x 26 x 12 mm zasilanie od 3V do 6V 12 formatów danych wyjściowych tryb IDLE wyjście
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
W.J WIELICZKA
 Możliwość sterowania modelem robota do ośmiu stopni swobody lub innym urządzeniem wymagającym kontroli ruchu przestrzennego. Rozdzielczość pozycjonowania 512 położeń 9 bitów. Sterowanie z komputera przez
Możliwość sterowania modelem robota do ośmiu stopni swobody lub innym urządzeniem wymagającym kontroli ruchu przestrzennego. Rozdzielczość pozycjonowania 512 położeń 9 bitów. Sterowanie z komputera przez
Karta katalogowa JAZZ OPLC JZ20-T40/JZ20-J-T wejść cyfrowych, 2 wejścia analogowe/cyfrowe, 2 wejścia analogowe. 20 wyjść tranzystorowych
 Karta katalogowa JAZZ OPLC JZ20-T40/JZ20-J-T40 16 wejść cyfrowych, 2 wejścia analogowe/cyfrowe, 2 wejścia analogowe 20 wyjść tranzystorowych Specyfikacja techniczna Zasilanie Napięcie zasilania 24 VDC
Karta katalogowa JAZZ OPLC JZ20-T40/JZ20-J-T40 16 wejść cyfrowych, 2 wejścia analogowe/cyfrowe, 2 wejścia analogowe 20 wyjść tranzystorowych Specyfikacja techniczna Zasilanie Napięcie zasilania 24 VDC
Kurs Wprowadzający. Daniel Wlazło, Mikołaj Marcinkiewicz
 Kurs Wprowadzający Daniel Wlazło, Mikołaj Marcinkiewicz Sprawy organizacyjne Grupa KNR Kandydaci PWM PWM - Modulacja szerokości impulsów Ze względu na pewną bezwładność układ uśrednia napięcie. Zasilanie
Kurs Wprowadzający Daniel Wlazło, Mikołaj Marcinkiewicz Sprawy organizacyjne Grupa KNR Kandydaci PWM PWM - Modulacja szerokości impulsów Ze względu na pewną bezwładność układ uśrednia napięcie. Zasilanie
Moduł prototypowy X3-DIL64 z procesorem ATxmega128A3U-AU
 Moduł prototypowy X3-DIL64 z procesorem ATxmega128A3U-AU wersja 2.1 Moduł X3-DIL64 umożliwia prototypowanie urządzeń z wykorzystaniem procesora ATmega128A3U-AU oraz naukę programowania nowoczesnych mikrokontrolerów
Moduł prototypowy X3-DIL64 z procesorem ATxmega128A3U-AU wersja 2.1 Moduł X3-DIL64 umożliwia prototypowanie urządzeń z wykorzystaniem procesora ATmega128A3U-AU oraz naukę programowania nowoczesnych mikrokontrolerów
Podstawy budowy robotów
 Podstawy budowy robotów Kamil Rosiński KoNaR 15.10.2015 Kamil Rosiński (KoNaR) Podstawy budowy robotów 15.10.2015 1 / 18 Spis treści 1 Przepisy Konkurencja Line Follower Light 2 Budowa robota Istotne szczegóły
Podstawy budowy robotów Kamil Rosiński KoNaR 15.10.2015 Kamil Rosiński (KoNaR) Podstawy budowy robotów 15.10.2015 1 / 18 Spis treści 1 Przepisy Konkurencja Line Follower Light 2 Budowa robota Istotne szczegóły
Systemy Wbudowane. Arduino dołączanie urządzeń Wersja Arduino więcej portów I/O. Układy serii 74. Układy serii 74xx a seria 40xx
 Arduino więcej portów I/O Systemy Wbudowane Arduino dołączanie urządzeń Wersja 08 mgr inż. Marek Wilkus Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Kraków Użycie pinów analogowych Liczniki
Arduino więcej portów I/O Systemy Wbudowane Arduino dołączanie urządzeń Wersja 08 mgr inż. Marek Wilkus Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Kraków Użycie pinów analogowych Liczniki
Mikrokontrolery AVR techniczne aspekty programowania
 Andrzej Pawluczuk Mikrokontrolery AVR techniczne aspekty programowania Białystok, 2004 Mikrokontrolery rodziny AVR integrują w swojej strukturze między innymi nieulotną pamięć przeznaczoną na program (pamięć
Andrzej Pawluczuk Mikrokontrolery AVR techniczne aspekty programowania Białystok, 2004 Mikrokontrolery rodziny AVR integrują w swojej strukturze między innymi nieulotną pamięć przeznaczoną na program (pamięć
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie