Mikrokontrolery. System dydaktyczny z mikrokontrolerem (μc) Freescale (MC68HC908QT4A)
|
|
|
- Patryk Ludwik Malinowski
- 9 lat temu
- Przeglądów:
Transkrypt
1 Mikrokontrolery System dydaktyczny z mikrokontrolerem (μc) Freescale (MC68HC908QT4A)
 Freescale")
2 Mikrokontrolery wiadomości wstępne Mikrokontroler Freescale MC68HC908QT4A - cechy charakterystyczne - architektura - proces wykonywania programu - tryby adresacji - lista rozkazów Koncepcja modułowego stanowiska laboratoryjnego z µc Nitron Freescale (d. Freescale Semiconductor) - aplikacja klawiatura i linijka diodowa - aplikacja przetwornik a/c 2
 - aplikacja klawiatura i linijka diodowa - aplikacja")
3 Uzasadnienie wyboru μc Freescale Bogate wyposażenie w układy peryferyjne, duża ilość dedykowanych wersji Dostęp do bezpłatnego firmowego oprogramowania - środowisko uruchomieniowe IDE CodeWarrior (kompilator asemblera, języka C/C++, debugowanie, graficzny interfejs Processor Expert-dostęp do układów peryferyjnych poza hardwarem) Dla studentów: dostęp do bezpłatnych próbek μc i czujników współpraca z Freescale System Application Laboratory z siedzibą w Roznovie pod Radhostem, sprawdzona podczas przygotowania dziewięciu prezentacji w ramach Festiwalu Nauki 3

4 Mikrokontrolery (µc) nazywane też mikrokomputerami jednoukładowymi (ang. single chip microcomputer) to scalone systemy mikroprocesorowe. Mikrokontroler (µc) zawiera w jednej obudowie: mikroprocesor (µp), określany też jako rdzeń (ang. core) pamięć programu (nieulotna: ROM - Read Only Memory, Flash, rzadziej EPROM-Erasable Programmable ROM, EEPROM- Electrically Erasable PROM jako uzupełnienie) pamięć danych (RAM - pamięć o dostępie swobodnym) układy peryferyjne (interfejsy) 4
 pamięć programu (nieulotna: ROM - Read Only Memory, Flash, rzadziej EPROM-Erasable Programmable ROM, EEPROM-")
5 Układami peryferyjnymi mogą być: Linie wejścia-wyjścia (binarne), zgrupowane w tzw. porty, Porty szeregowe różnych standardów: SCI (Serial Communication Interface transmisja asynchroniczna), SPI (Serial Pheripherial Interface transmisja synchroniczna), I2C (Inter Integrated Circuit - do komunikacji międzyukładowej), USB (Universal Serial Bus łącze szeregowe w sprzęcie komputerowym), Ethernet (stosowany w LAN rozległe sieci komputerowe), CAN (Controller Network Area magistrala motoryzacyjna), IrDA (Infrared Data Association - standard bezprzewodowej transmisji danych z wykorzystaniem podczerwieni), Układy szeregowo-licznikowe: zliczanie impulsów, odmierzanie czasu, generacja przebiegów, wyjścia typu PWM (Pulse Width Modulation) modulacja szerokości impulsów, Przetworniki a/c 5
, IrDA (Infrared Data Association - standard bezprzewodowej transmisji danych z wykorzystaniem podczerwieni), Układy szeregowo-licznikowe: zliczanie impulsów, odmierzanie")
6 Rodzina mikrokontrolerów Mikrokontrolery zawierające ten sam mikroprocesor tworzą rodzinę. Cechami wspólnymi rodziny są: Ten sam μp czyli rdzeń (ang. core) tu: HC08 Identyczna lista rozkazów W ramach rodziny poszczególne typy µc różnią się: wewnętrznie - zestawem układów peryferyjnych oraz pojemnościami pamięci programu i danych, a zewnętrznie - ilością pinów obudowy. Rodzina może zawierać nawet kilkaset układów scalonych. Rodzina dysponuje wersjami uruchomieniowym, w których jest pamięć programu typu Flash oraz układami docelowymi, stosowanymi przy produkcji wielkoseryjnej z pamiecią programu, określaną przez indywidualną maskę (pamieć ROM). W ramach rodziny HC08 wyróżniamy 17 grup: AB, AP, AS/AZ, BD, EY, G, GZ, JB/JG/JT, K, LB, LJ/LK, LT, LV, MR, Q, RF, SR. W grupie Q, jest 29 typów µc : QB, QC, QL, QT, QY, HLC QT, HLC QY. 6

7 Rodzina mikrokontrolerów Stosowany w naszym systemie dydaktycznym µc należy do rodziny 68HC08 firmy Freescale typ QT, o nazwie handlowej Nitron (ang. Nitron - nitrogliceryna) oznaczony MC68HC908QT4A (8 pinów). Charakteryzuje się optymalny stosunkiem ceny do możliwości duża częstotliwość taktowania, bogate wyposażenie w układy peryferyjne, pamięć Flash, mała obudowa (8 pinów). μp komunikuje się z układami peryferyjnymi przy pomocy rejestrów specjalnych (sterującymi, statusowymi i danych), umieszczonych w obszarze pamięci danych (HC08: 64 bajty RAM). Po dodaniu interfejsów, zwiększa się ilość rejestrów, pozostaje taka sama listę rozkazów. µc zawierają specyficzne podzespoły: zegar czuwania (watchdog), układ nadzoru zegara, wbudowaną logikę portu testowego. Port taki łączy µc z zewnętrznym układem nadrzędnym (host) w celu zapisu programu i testowania pracy on-line. Zwykle układ host (typowo komputer) wyposażony jest w oprogramowanie firmowe (np. CodeWarrior). 7
, umieszczonych w obszarze pamięci danych (HC08: 64 bajty RAM).")
8 Po resecie Sygnał zerowania wewnętrznym sygnałem IRST (internal reset signal), który może być wytworzony przez: zewnętrzne wejście sygnału zerowania zerowanie po wykryciu włączenia napięcia zasilającego POR (power-on reset) układ wykrywający spadek napięcia zasilającego LVI (low-voltage inhibit) zegar czuwania (gdy nastąpiło jego przepełnienie zegar nie był wyzerowany) pobranie nieprawidłowego kodu rozkazu ILOP (illegal opcode reset) próba pobrania rozkazu z niedozwolonego miejsca ILAD (illegal address reset) Po resecie przerwania są zablokowane, interfejsy są nieaktywne, a linie portów ustawione jako wejścia. 8
 Po resecie przerwania są zablokowane, interfejsy są nieaktywne, a linie portów ustawione")
9 Poufność oprogramowania Ustawienie 8 bajtów bezpieczeństwa w rejestrach Flash (można z tego zrezygnować ustawiając w czasie programowania opcję ignore security failure) 9

10 Struktura rejestrów µc komunikuje się z układami peryferyjnymi przy pomocy rejestrów specjalnych, umieszczonych w obszarze pamięci danych. Tak wiec po dodaniu interfejsów, zwiekszamy ilość rejestrów zostawiając taką samą listę rozkazów. µc zawierają specyficzne podzespoły: zegar czuwania (watchdog), układ nadzoru zegara, wbudowaną logikę portu testowego. Port taki łączy µc z zewnętrznym układem nadrzędnym (host) w celu zapisu programu i testowania pracy on-line. Zwykle układ host (typowo komputer) wyposażony jest w oprogramowanie firmowe (np. CodeWarrior). 10
 w celu zapisu programu i testowania pracy on-line.")
11 Struktura rejestrów (c. d.) Na wyjścia portu PTA mogą być podłączone linie: wejścia-wyjścia PTA0 5; timera TCH0,1,TCK ; przetwornika AD0 3 ; klawiatury KBI0 5, oscylatora zewnętrznego OSC1,2. O tym która linia będzie podłączona decydują ustawienia w rejestrze/rejestrach sterujących. Czasem jest to kilka rejestrów, czasem jest to wspólny rejestr statusowo - sterujący (np. w przetworniku a/c). Po resecie wszystkie interfejsy nieaktywne, a linie portu A jako wejścia. Wyróżniamy rejestry specjalne: sterujące (konfiguracyjne i aktywacyjne) statusowe (dają podgląd tego co dzieje się w rejestrze) danych. 11
.")
12 Przerwanie Są dwa rodzaje przerwań maskowalne (sprzętowe zewnętrzne sygnalizowane przez (external interrupt) lub od modułu klawiatury - każda z sześciu linii modułu klawiatury - n= 0 5) i niemaskowalne (programowe SWI Software Interrupt). Dwa poziomy blokady przerwań. Główny bit I = 1 generalnie blokuje przyjmowanie przerwań (po resecie I = 1). Jeśli bit I = 0 to przyjecie przerwania zależy od bitu zezwalającego w rejestrze sterującym danego interfejsu. Jeśli zablokujemy przerwanie w rejestrze sterującym, a interfejs żąda obsługi przerwania, to stan ten możemy rozpoznać po ustawieniu odpowiedniego bitu w rejestrze statusowym. Możemy pracować w systemie przeglądania (polling) czytamy rejestry statusowe poszczególnych interfejsów. Przy pollingu można też skorzystać ze zbiorczych rejestrów statusowych, grupujących wyłącznie bity żądań, co przyspiesza przeglądanie. 12

13 Tryby oszczędzania energii (niskiego poboru mocy) Typowe działanie µc w którym jednostka centralna wykonuje kolejne instrukcje programu nazywane jest trybem aktywnym (active mode, run mode) lub normalnym (normal mode). Wartość pradu pobieranego RI DD zależy od: temperatury realizowanego zadania (liczbą uruchomionych modułów np. ADC, ilością aktywnych we-wy) częstotliwość zegara magistrali wartość napiecia zasilajacego Dwa tryby oszczędzania energii: oczekiwanie (wait mode) zatrzymanie (stop mode) Instrukcje WAIT i STOP wprowadzają µc w stan zawieszenia o niskim poborze mocy. Instrukcja WAIT - wejście w tryb oczekiwania, zatrzymanie CPU (zatrzymanie modułu zegara OCS, ustawienie I=0 w rejestrze CCR), działają układy peryferyjne i można przerwaniem wyprowadzić CPU z tego trybu przez przerwanie i przez RESET. Instrukcja STOP wejście w tryb zatrzymania, zatrzymanie CPU i układów peryferyjnych, (ustawienie I = 0 w rejestrze CCR), jest podtrzymywana pamięć danych można wyjść z tego trybu tylko przez RESET. 13

14 Moduł AWU (Auto Wakeup Module) Generuje okresowe przerwania wewnętrzne w czasie trybu STOP, aby wyprowadzić MCU z tego trybu, można wyjść z tego trybu bez sygnałów zewnetrznych. Zezwolenie na uruchomienie zegara w trybie STOP ustawiane jest w rejestrze CONFIG2. Wybierany okres timeout w rejestrze CONFIG1. Żądanie wakeup jest traktowane jak przerwanie od klawiatury. Dwa źródła zegara dla AWU: generator RC lub sygnał w module generatora. Te generatory są nieaktywne podczas normalnej pracy. AWU dzieli przerwanie z wektorem KBI. 14

15 Oznaczenie µc grupy Q 15
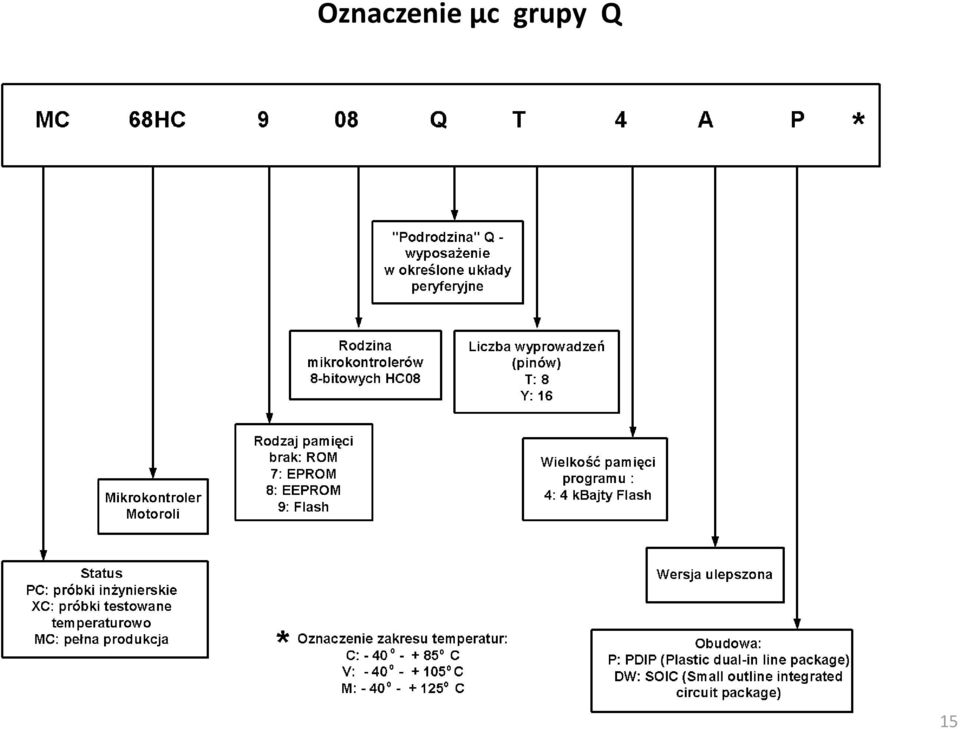
16 Cechy µc MC68HC908QT4A Zakres napięć zasilających V DD : 5V i 3V. Częstotliwość pracy wewnętrznej magistrali: 1MHz, 2MHz, 3.2MHz (jest to ¼ częstotliwości wewnetrznego zegara) Wewnętrzna pamięć programu Flash 4 k Bajtów Port równoległy PTA Podzespoły przerwań zewnętrznych: - IRQ, - KBI 2-kanałowy, 16-bitowy moduł interface u timera 2-kanałowy, 16-bitowy przetwornik a/c Dwa tryby oszczędzania energii: Wait i Stop Zegar czuwania COP Tryb pracy MONITOR (program w pamięci ROM µc) wspomaganie uruchamiania (development support) czyli programowanie pamięci Flash przez RS232 lub USB z komputera zewnętrznego (host). 16
 wspomaganie uruchamiania (development support) czyli programowanie pamięci Flash przez RS232 lub USB z")
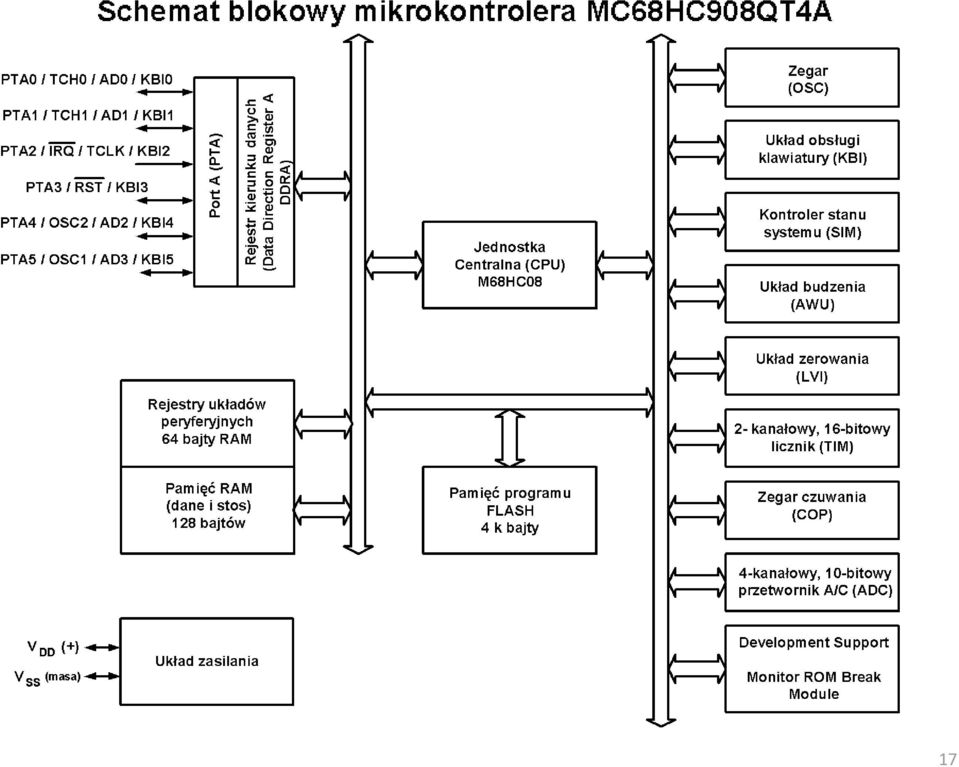
17 17
18 Opis modułów user mode Moduł OSC wewnętrzny generator: f= 4 lub 8 lub 12,8 MHz. 12,8 MHz jest domyślną częstotliwością po resecie. Zegar magistrali (1/4 częstotliwości wew. generatora) :1 lub 2 lub 3,2 MHz. Możliwość trymowania. Moduł COP (Computer Operating Properly) czyli zegar czuwania zabezpieczenie przed uszkodzeniem pamięci flash lub błędnym programem. Zawiera licznik, który generuje sygnał zerowania μc po przepełnieniu. Prawidłowy program zeruje stan licznika co pewien czas. Moduł LVI (Low Voltage Inhibit) - wykrywający spadek napięcia zasilającego Moduł AWU (Auto Wake Up) generuje okresowe przerwania w celu wyprowadzenia μc ze stanu zatrzymania Stop (bez sygnałów zewnętrznych) Moduł KBI (Keyboard Interrupt ) generuje przerwania wyzwalane zboczem Moduł SIM (System Integration) wspomaganie przerwań wewnętrznych i zewnętrznych, wspólnie z CPU steruje czynnościami μc Moduł przetwornika a/c 4 kanałowy, 10 lub 8-bitowy, metoda liniowej kompensacji wagowej, czas przetwarzania kilkanaście μs Moduł timera przebiegi czasowe z funkcją Input Capture, Output Compare, PWM (Pulse Width Modulation) 18
 - wykrywający spadek napięcia zasilającego Moduł AWU (Auto Wake Up) generuje okresowe przerwania w celu wyprowadzenia μc ze stanu zatrzymania Stop (bez sygnałów")
19 Opis modułu Monitor mode Tryb pracy MONITOR (program w pamięci ROM µc) wspomaganie uruchamiania (development support) czyli programowanie pamięci Flash przez RS232 lub USB z komputera zewnętrznego (host). Wykorzystanie Modułu Development Support Monitor ROM Break Module Nadrzędny host przejmuje kontrolę nad μc Realizacja programu ( firmware ) z pamięci ROM Dostęp do stanu całego układu (rejestry peryferyjne, lokacje RAM, pamięć Flash możliwość poufności oprogramowania na 8 bajtach bezpieczeństwa) Możliwość modyfikowania każdego rejestru CPU oraz dowolnej lokacji RAM Pułapka sprzętowa (breakpoint) praca krokowa 19
 Możliwość")

20 Struktura systemu laboratoryjnego z mikrokontrolerem MC68HC 908QT4A 20


21 Jednostka centralna 21
22 Moduł oscylatora OSC Module Zegar wewnętrzny o małej dokładności (, może być tez zewnętrzny: RC, Generator lub kwarc (potrzebne 2 piny). Częstotliwość zegara wynosi ¼ każdej z poniższego źródła zegara. Wewnętrzny oscylator: Generowana wewnętrznie, stała częstotliwość zegara, przestrajana 0,4 %. Można wybrać trzy częstotliwości wewnętrznego oscylatora: 12,8 MHz, 8 MHz, i 4 MHz. 12,8 MHz jest domyślną częstotliwością po resecie. Po podzieleniu przez 4 daje zegar magistrali: 3,2 MHZ. Wady: nie ma możliwości wyboru odpowiedniej prędkości pracy oraz mała dokładność: nawet do ±25 %. Zewnętrzny oscylator : zewnętrzny zegar może być dołączony tylko do pinu OSC1. Zewnętrzny RC: wbudowany moduł oscylatora (oscylator RC) wymaga tylko zewnętrznego R do linii OSC1. Kondensator C jest wewnątrz. Tez ma małą dokładność. Zewnętrzny rezonator kwarcowy (XTAL oscillator): wbudowany oscylator wymaga zewnętrznego kwarcu podłączonego do dwóch pinów OSC1 i OSC2. Można wybrać częstotliwość zegara magistrali i uzyskać dużą dokładność. 22
23 Moduł oscylatora OSC Module (c. d.) Do odmierzania czasu rzeczywistego (RTC Real Time Clock) musimy odmierzać dokładnie 1 sekundę. Odpowiednio dobrana częstotliwość kwarcu, podzielona w wewnętrznym bloku licznikowym musi zapewniać generację całkowitej ilości przerwań na sekundę (przepełnienie licznika). 23

24 Mapa pamięci mikrokontrolera PAMIĘĆ µc MC68HC908QT4A Pamięć ma jednolitą przestrzeń adresową 64 k Bajtów (adresy $0000 $FFFF), co oznacza, że poszczególne bloki pamięci oraz porty i układy peryferyjne współdzielą jeden zbiór adresów. Te same rozkazy i tryby adresowania mogą być użyte w odniesieniu do lokacji pamięci oraz do dowolnych rejestrów. Strona zerowa (page 0) obejmuje 256 lokacji pamięci statycznej RAM (Random Access Memory) o adresach $0000 $00FF. Znajdują się na niej rejestry układów peryferyjnych i stos. Do tej strony stosuje się tryb adresacji bezpośredniej. 24
25 Tabela wektorów czyli tabela adresów początkowych stanów wyjątkowych i przerwań 25
26 Pamięć Lokacje pamięci poniżej adresu $00FF mogą być dostępne przy użyciu bardziej wydajnego trybu adresacji bezpośredniej i każdy pojedynczy bit z tego obszaru może być dostępny przez instrukcje manipulacji bitami (BCLR, BSET, BRCLR i BRSET). Pamięć RAM zachowuje dane gdy µc jest w trybie oczekiwania o niskim poborze mocy (low-power wait) lub w trybie zatrzymania (stop). Pamięć FLASH jest przeznaczona do przechowywania programu. Program jest ładowany do pamięci FLASH po końcowej asemblacji. 26
27 Wykonanie programu W mikrokontrolerach rozkazy wykonywane są sekwencyjnie (w odróżnieniu od przetwarzania potokowego - pipelining, stosowanego w niektórych mikroprocesorach). Każda faza wykonywania rozkazu realizowane jest po zakończeniu poprzedniej (w potokowym fazy zachodzą na siebie). Te fazy to: pobranie (fetch) dekodowanie (decode) wykonanie (execute) zapis (write) 27
28 Wykonanie programu Mikrokontroler rozpoczyna pracę od stanu początkowego inicjowanego przez sygnał RESET. Jest to stan wyjątkowy (exception). Wtedy rejestry ustawiane są w stan początkowy, a program jest odczytywany z pamięci FLASH począwszy od lokacji $FFFF (jest to koniec dostępnego 64 k bajtowego obszaru znajduje się tam tablica wektorów dla stanów wyjątkowych i przerwań). Obsługa stanu wyjątkowego RESET powoduje, że do licznika rozkazów PC wpisywana jest kolejno wartość $FFFE, adres jest wysyłany na szynę adresową i pobierany jest pierwszy bajt (STARSZY) adresu startowego programu, potem kolejno adres $FFFF i pobierany jest drugi bajt (MŁODSZY) adresu. Te dwa bajty tworzą adres startowy tzw. wektor startowy. Jest on przygotowany przez programistę w pamięci Flash lub pobrany z bloku ROM jeżeli µc uruchomiono w trybie MONITORA Zerowanie powoduje ustawienie niektórych rejestrów: wskaźnik stosu SP -$00FF, Bajt H w rejestrze indeksowym (H:X) stan $00, maska przerwań I = 1 w rejestrze CCR (przerwania zablokowane). 28
29 Aplikacja klawiatura i linijka diodowa Przykład zwiększania ilości linii portu A: - wejścia (8 przycisków) - i wyjścia (16 diod LED) przy pomocy rejestrów przesuwnych: - rejestru równoległo-szeregowego 74LS165 - i rejestru szeregowo-równoległego 74LS164 29
30 Schemat ideowy aplikacji: klawiatura linijka diodowa 30
31 Rejestry przesuwne 31
32 Program główny: - podprogram INIT (przygotowanie mikrokontrolera do pracy) - podprogram IN (odczyt stanu klawiatury), - podprogram CONV (konwersja odczytu), - podprogram OUT (wyświetlenie wyniku), - podprogram TIME (opóźnienie programowe), - skok bezwarunkowy do początku pętli poza czynności inicjalizujące. 32
33 Mikrokontrolery Dziękuję za uwagę 33
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
System mikroprocesorowy i peryferia. Dariusz Chaberski
 System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
1. Wstęp Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE Rdzeń mikrokontrolerów ST7FLITE... 15
 3 1. Wstęp... 9 2. Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE... 11 3. Rdzeń mikrokontrolerów ST7FLITE... 15 3.1. Jednostka centralna...16 3.2. Organizacja i mapa pamięci...19 3.2.1. Pamięć RAM...20
3 1. Wstęp... 9 2. Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE... 11 3. Rdzeń mikrokontrolerów ST7FLITE... 15 3.1. Jednostka centralna...16 3.2. Organizacja i mapa pamięci...19 3.2.1. Pamięć RAM...20
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Mikroprocesor Operacje wejścia / wyjścia
 Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Opis układów wykorzystanych w aplikacji
 Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
STM32 Butterfly. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Przerwania, polling, timery - wykład 9
 SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
IIPW_SML3_680 (Z80) przewodnik do ćwiczeń laboratoryjnych
 przewodnik do ćwiczeń laboratoryjnych") IIPW_SML3_680 (Z80) przewodnik do ćwiczeń laboratoryjnych wrzesieo 2010 UWAGA: Moduł jest zasilany napięciem do 3.3V i nie może współpracowad z wyjściami układów zasilanych z wyższych napięd. Do pracy
IIPW_SML3_680 (Z80) przewodnik do ćwiczeń laboratoryjnych wrzesieo 2010 UWAGA: Moduł jest zasilany napięciem do 3.3V i nie może współpracowad z wyjściami układów zasilanych z wyższych napięd. Do pracy
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Pośredniczy we współpracy pomiędzy procesorem a urządzeniem we/wy. W szczególności do jego zadań należy:
 Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Przerwania w systemie mikroprocesorowym. Obsługa urządzeo wejścia/wyjścia
 Przerwania w systemie mikroprocesorowym 1 Obsługa urządzeo wejścia/wyjścia W każdym systemie mikroprocesorowym oprócz pamięci programu i pamięci danych znajduje się szereg układów lub urządzeo wejścia/wyjścia,
Przerwania w systemie mikroprocesorowym 1 Obsługa urządzeo wejścia/wyjścia W każdym systemie mikroprocesorowym oprócz pamięci programu i pamięci danych znajduje się szereg układów lub urządzeo wejścia/wyjścia,
Wstęp Architektura mikrokontrolerów 68HC08
 3 Wstęp...10 1. Architektura mikrokontrolerów 68HC08...13 1.1. Architektura... 14 1.1.1. CPU: rdzeń 68HC08...14 1.1.1.1. Model 68HC08 dla programisty... 14 1.1.1.2. Podstawy: przeniesienie i przepełnienie...
3 Wstęp...10 1. Architektura mikrokontrolerów 68HC08...13 1.1. Architektura... 14 1.1.1. CPU: rdzeń 68HC08...14 1.1.1.1. Model 68HC08 dla programisty... 14 1.1.1.2. Podstawy: przeniesienie i przepełnienie...
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515
 Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
2. Code Composer Studio v4 zintegrowane środowisko projektowe... 41
 3 Wstęp...11 1. Procesory serii TMS320F2802x/3x/6x Piccolo... 15 1.1. Organizacja układów procesorowych serii F2802x Piccolo...23 1.2. Organizacja układów procesorowych serii F2803x Piccolo...29 1.3. Organizacja
3 Wstęp...11 1. Procesory serii TMS320F2802x/3x/6x Piccolo... 15 1.1. Organizacja układów procesorowych serii F2802x Piccolo...23 1.2. Organizacja układów procesorowych serii F2803x Piccolo...29 1.3. Organizacja
RODZAJE PAMIĘCI RAM. Cz. 1
 RODZAJE PAMIĘCI RAM Cz. 1 1 1) PAMIĘĆ DIP DIP (ang. Dual In-line Package), czasami nazywany DIL - w elektronice rodzaj obudowy elementów elektronicznych, głównie układów scalonych o małej i średniej skali
RODZAJE PAMIĘCI RAM Cz. 1 1 1) PAMIĘĆ DIP DIP (ang. Dual In-line Package), czasami nazywany DIL - w elektronice rodzaj obudowy elementów elektronicznych, głównie układów scalonych o małej i średniej skali
MIKROPROCESORY architektura i programowanie
 Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Systemy wbudowane Mikrokontrolery
 Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
Sygnały DRQ i DACK jednego kanału zostały użyte do połączenia kaskadowego obydwu sterowników.
 Płyty główne Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Układ DMA Układ DMA zawiera dwa sterowniki przerwań 8237A połączone kaskadowo. Każdy sterownik 8237A
Płyty główne Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Układ DMA Układ DMA zawiera dwa sterowniki przerwań 8237A połączone kaskadowo. Każdy sterownik 8237A
Wykład Mikroprocesory i kontrolery
 Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
LEKCJA TEMAT: Zasada działania komputera.
 LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
o Instalacja środowiska programistycznego (18) o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)
 o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)") O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
Spis treúci. Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1. Przedmowa... 9. Wstęp... 11
 Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1 Spis treúci Przedmowa... 9 Wstęp... 11 1. Komputer PC od zewnątrz... 13 1.1. Elementy zestawu komputerowego... 13 1.2.
Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1 Spis treúci Przedmowa... 9 Wstęp... 11 1. Komputer PC od zewnątrz... 13 1.1. Elementy zestawu komputerowego... 13 1.2.
Układ sterowania, magistrale i organizacja pamięci. Dariusz Chaberski
 Układ sterowania, magistrale i organizacja pamięci Dariusz Chaberski Jednostka centralna szyna sygnałow sterowania sygnały sterujące układ sterowania sygnały stanu wewnętrzna szyna danych układ wykonawczy
Układ sterowania, magistrale i organizacja pamięci Dariusz Chaberski Jednostka centralna szyna sygnałow sterowania sygnały sterujące układ sterowania sygnały stanu wewnętrzna szyna danych układ wykonawczy
080_MC68HC908Qx. Generator przebiegu zegarowego. Interfejs RS232. Pakiet mikrokontrolera serii MC68HC908Q dla systemu SML3
 080_MC68HC908Qx Pakiet mikrokontrolera serii MC68HC908Q dla systemu SML3 Instrukcja programowania i uruchamiania wersja robocza, na prawach rękopisu Grzegorz Mazur Politechnika Warszawska Instytut Informatyki
080_MC68HC908Qx Pakiet mikrokontrolera serii MC68HC908Q dla systemu SML3 Instrukcja programowania i uruchamiania wersja robocza, na prawach rękopisu Grzegorz Mazur Politechnika Warszawska Instytut Informatyki
Charakterystyka mikrokontrolerów
 Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Architektura systemu komputerowego. Działanie systemu komputerowego. Przerwania. Obsługa przerwań (Interrupt Handling)
") Struktury systemów komputerowych Architektura systemu komputerowego Działanie systemu komputerowego Struktura we/wy Struktura pamięci Hierarchia pamięci Ochrona sprzętowa Architektura 2.1 2.2 Działanie
Struktury systemów komputerowych Architektura systemu komputerowego Działanie systemu komputerowego Struktura we/wy Struktura pamięci Hierarchia pamięci Ochrona sprzętowa Architektura 2.1 2.2 Działanie
2. Budowa układów procesorowych rodziny TMS320C
 3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701. SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701.
 SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
Technika mikroprocesorowa. W. Daca, Politechnika Szczecińska, Wydział Elektryczny, 2007/08
 Pamięci Układy pamięci kontaktują się z otoczeniem poprzez szynę danych, szynę owa i szynę sterującą. Szerokość szyny danych określa liczbę bitów zapamiętywanych do pamięci lub czytanych z pamięci w trakcie
Pamięci Układy pamięci kontaktują się z otoczeniem poprzez szynę danych, szynę owa i szynę sterującą. Szerokość szyny danych określa liczbę bitów zapamiętywanych do pamięci lub czytanych z pamięci w trakcie
Opis funkcjonalny i architektura. Modu³ sterownika mikroprocesorowego KM535
 Opis funkcjonalny i architektura Modu³ sterownika mikroprocesorowego KM535 Modu³ KM535 jest uniwersalnym systemem mikroprocesorowym do pracy we wszelkiego rodzaju systemach steruj¹cych. Zastosowanie modu³u
Opis funkcjonalny i architektura Modu³ sterownika mikroprocesorowego KM535 Modu³ KM535 jest uniwersalnym systemem mikroprocesorowym do pracy we wszelkiego rodzaju systemach steruj¹cych. Zastosowanie modu³u
Wykład 3. Przegląd mikrokontrolerów 8-bit: STM8
 Wykład 3 Przegląd mikrokontrolerów 8-bit: - 8051 - STM8 Mikrokontrolery 8051 Rodzina 8051 wzięła się od mikrokontrolera Intel 8051 stworzonego w 1980 roku Mikrokontrolery 8051 były przez długi czas najpopularniejszymi
Wykład 3 Przegląd mikrokontrolerów 8-bit: - 8051 - STM8 Mikrokontrolery 8051 Rodzina 8051 wzięła się od mikrokontrolera Intel 8051 stworzonego w 1980 roku Mikrokontrolery 8051 były przez długi czas najpopularniejszymi
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2
 Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Arduino dla początkujących. Kolejny krok Autor: Simon Monk. Spis treści
 Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW
 MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW Projektowanie urządzeń cyfrowych przy użyciu układów TTL polegało na opracowaniu algorytmu i odpowiednim doborze i zestawieniu układów realizujących różnorodne funkcje
MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW Projektowanie urządzeń cyfrowych przy użyciu układów TTL polegało na opracowaniu algorytmu i odpowiednim doborze i zestawieniu układów realizujących różnorodne funkcje
Technologia informacyjna. Urządzenia techniki komputerowej
 Technologia informacyjna Urządzenia techniki komputerowej System komputerowy = hardware (sprzęt) + software (oprogramowanie) Sprzęt komputerowy (ang. hardware) zasoby o specyficznej strukturze i organizacji
Technologia informacyjna Urządzenia techniki komputerowej System komputerowy = hardware (sprzęt) + software (oprogramowanie) Sprzęt komputerowy (ang. hardware) zasoby o specyficznej strukturze i organizacji
USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip.
 1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
Płyta uruchomieniowa EBX51
 Dariusz Kozak ZESTAW URUCHOMIENIOWY MIKROKOMPUTERÓW JEDNOUKŁADOWYCH MCS-51 ZUX51 Płyta uruchomieniowa EBX51 INSTRUKCJA OBSŁUGI Wszystkie prawa zastrzeżone Kopiowanie, powielanie i rozpowszechnianie w jakiejkolwiek
Dariusz Kozak ZESTAW URUCHOMIENIOWY MIKROKOMPUTERÓW JEDNOUKŁADOWYCH MCS-51 ZUX51 Płyta uruchomieniowa EBX51 INSTRUKCJA OBSŁUGI Wszystkie prawa zastrzeżone Kopiowanie, powielanie i rozpowszechnianie w jakiejkolwiek
Architektura systemów komputerowych. dr Artur Bartoszewski
 Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Systemy na Chipie. Robert Czerwiński
 Systemy na Chipie Robert Czerwiński Cel kursu Celem kursu jest zapoznanie słuchaczy ze współczesnymi metodami projektowania cyfrowych układów specjalizowanych, ze szczególnym uwzględnieniem układów logiki
Systemy na Chipie Robert Czerwiński Cel kursu Celem kursu jest zapoznanie słuchaczy ze współczesnymi metodami projektowania cyfrowych układów specjalizowanych, ze szczególnym uwzględnieniem układów logiki
Wykład 2. Mikrokontrolery z rdzeniami ARM
 Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Organizacja typowego mikroprocesora
 Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Systemy wbudowane. Paweł Pełczyński ppelczynski@swspiz.pl
 Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Moduł uruchomieniowy mikrokontrolera MC68HC912B32
 Instytut Cybernetyki Technicznej Systemy Mikroprocesorowe Moduł uruchomieniowy mikrokontrolera MC68HC912B32 Grzegorz Cielniak Wrocław 1999 1. Informacje ogólne Moduł uruchomieniowy jest tanim i prostym
Instytut Cybernetyki Technicznej Systemy Mikroprocesorowe Moduł uruchomieniowy mikrokontrolera MC68HC912B32 Grzegorz Cielniak Wrocław 1999 1. Informacje ogólne Moduł uruchomieniowy jest tanim i prostym
Architektura komputera
 Architektura komputera Architektura systemu komputerowego O tym w jaki sposób komputer wykonuje program i uzyskuje dostęp do pamięci i danych, decyduje architektura systemu komputerowego. Określa ona sposób
Architektura komputera Architektura systemu komputerowego O tym w jaki sposób komputer wykonuje program i uzyskuje dostęp do pamięci i danych, decyduje architektura systemu komputerowego. Określa ona sposób
Wprowadzenie. Dariusz Wawrzyniak. Miejsce, rola i zadania systemu operacyjnego w oprogramowaniu komputera
 Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Definicja systemu operacyjnego (1) Miejsce,
Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Definicja systemu operacyjnego (1) Miejsce,
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Zegar czasu rzeczywistego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 5 maja 2015 Zegar czasu rzeczywistego Niezależny układ RTC (ang.
Programowanie mikrokontrolerów 2.0 Zegar czasu rzeczywistego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 5 maja 2015 Zegar czasu rzeczywistego Niezależny układ RTC (ang.
PRZERWANIA. 1. Obsługa zdarzeń, odpytywanie i przerwania Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego.
 PRZERWANIA 1. Obsługa zdarzeń, odpytywanie i Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego. Istnieją dwie metody pozyskania informacji o zdarzeniach: 1. Cykliczne
PRZERWANIA 1. Obsługa zdarzeń, odpytywanie i Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego. Istnieją dwie metody pozyskania informacji o zdarzeniach: 1. Cykliczne
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
UTK ARCHITEKTURA PROCESORÓW 80386/ Budowa procesora Struktura wewnętrzna logiczna procesora 80386
 Budowa procesora 80386 Struktura wewnętrzna logiczna procesora 80386 Pierwszy prawdziwy procesor 32-bitowy. Zawiera wewnętrzne 32-bitowe rejestry (omówione zostaną w modułach następnych), pozwalające przetwarzać
Budowa procesora 80386 Struktura wewnętrzna logiczna procesora 80386 Pierwszy prawdziwy procesor 32-bitowy. Zawiera wewnętrzne 32-bitowe rejestry (omówione zostaną w modułach następnych), pozwalające przetwarzać
Wprowadzenie. Dariusz Wawrzyniak. Miejsce, rola i zadania systemu operacyjnego w oprogramowaniu komputera
 Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Miejsce, rola i zadania systemu operacyjnego
Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Miejsce, rola i zadania systemu operacyjnego
Podstawy techniki cyfrowej Układy wejścia-wyjścia. mgr inż. Bogdan Pietrzak ZSR CKP Świdwin
 Podstawy techniki cyfrowej Układy wejścia-wyjścia mgr inż. Bogdan Pietrzak ZSR CKP Świdwin 1 Układem wejścia-wyjścia nazywamy układ elektroniczny pośredniczący w wymianie informacji pomiędzy procesorem
Podstawy techniki cyfrowej Układy wejścia-wyjścia mgr inż. Bogdan Pietrzak ZSR CKP Świdwin 1 Układem wejścia-wyjścia nazywamy układ elektroniczny pośredniczący w wymianie informacji pomiędzy procesorem
Architektura komputera. Cezary Bolek. Uniwersytet Łódzki. Wydział Zarządzania. Katedra Informatyki. System komputerowy
 Wstęp do informatyki Architektura komputera Cezary Bolek cbolek@ki.uni.lodz.pl Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki System komputerowy systemowa (System Bus) Pamięć operacyjna ROM,
Wstęp do informatyki Architektura komputera Cezary Bolek cbolek@ki.uni.lodz.pl Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki System komputerowy systemowa (System Bus) Pamięć operacyjna ROM,
ISBN. Copyright by Wydawnictwo BTC Legionowo 2010
 Książka jest praktycznym przewodnikiem po rodzinie mikrokontrolerów LPC2000 (rdzeń ARM7TDMI) oraz sposobach ich programowania w języku C. Omówiono w niej zarówno budowę i działanie bloków peryferyjnych,
Książka jest praktycznym przewodnikiem po rodzinie mikrokontrolerów LPC2000 (rdzeń ARM7TDMI) oraz sposobach ich programowania w języku C. Omówiono w niej zarówno budowę i działanie bloków peryferyjnych,
SAIA PROGRAMOWALNY STEROWNIK PLC
 SAIA PROGRAMOWALNY STEROWNIK PLC SAIA BURGESS ELECTRONICS SABUR Sp. z. o. o. ul. Drużynowa 3A 02 950 Warszwa tel. (022) 844 75 20 fax. (022) 844 36 39 SAIA 1 @KEMOR SPIS TREŚCI 1. KABEL K111 KABEL DO PROGRAMOWANIA
SAIA PROGRAMOWALNY STEROWNIK PLC SAIA BURGESS ELECTRONICS SABUR Sp. z. o. o. ul. Drużynowa 3A 02 950 Warszwa tel. (022) 844 75 20 fax. (022) 844 36 39 SAIA 1 @KEMOR SPIS TREŚCI 1. KABEL K111 KABEL DO PROGRAMOWANIA
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
CW-HC08 Programowanie mikrokontrolera MC9S08QD4
 CW-HC08 Programowanie mikrokontrolera MC9S08QD4 Jan Kędzierski Marek Wnuk Wrocław 2009 Dokument stanowi instrukcję do ćwiczenia w ramach kursu Systemy mikroprocesorowe w automatyce II. Spis treści 1 Cel
CW-HC08 Programowanie mikrokontrolera MC9S08QD4 Jan Kędzierski Marek Wnuk Wrocław 2009 Dokument stanowi instrukcję do ćwiczenia w ramach kursu Systemy mikroprocesorowe w automatyce II. Spis treści 1 Cel
Laboratorium Mikroinformatyki. Emulatory Sprzętowe
 Laboratorium Mikroinformatyki Emulatory Sprzętowe Co to jest Emulator? Emulator sprzętowy (In Circuit Emulator - ICE) jest nieocenionym narzędziem wspomagającym programistę przy tworzeniu oprogramowania
Laboratorium Mikroinformatyki Emulatory Sprzętowe Co to jest Emulator? Emulator sprzętowy (In Circuit Emulator - ICE) jest nieocenionym narzędziem wspomagającym programistę przy tworzeniu oprogramowania
Systemy operacyjne. Wprowadzenie. Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak
 Wprowadzenie Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego
Wprowadzenie Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego
Mikroprocesory i mikrosterowniki
 Mikroprocesory i mikrosterowniki Wykład 1 wstęp, budowa mikrokontrolera Wydział Elektroniki Mikrosystemów i Fotoniki Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Piotr Markowski
Mikroprocesory i mikrosterowniki Wykład 1 wstęp, budowa mikrokontrolera Wydział Elektroniki Mikrosystemów i Fotoniki Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Piotr Markowski
3. Sygnały zegarowe i ich konfiguracja, mechanizmy bezpieczeństwa... 47
 Spis treści 3 1. Rdzeń Cortex-M3...9 1.1. Firma ARM i jej wyroby...10 1.2. Rodzina rdzeni Cortex...12 1.3. Ogólne spojrzenie na architekturę rdzenia Cortex-M3...13 1.4. Rejestry podstawowe...16 1.5. Przestrzeń
Spis treści 3 1. Rdzeń Cortex-M3...9 1.1. Firma ARM i jej wyroby...10 1.2. Rodzina rdzeni Cortex...12 1.3. Ogólne spojrzenie na architekturę rdzenia Cortex-M3...13 1.4. Rejestry podstawowe...16 1.5. Przestrzeń
Wykład 6. Mikrokontrolery z rdzeniem ARM
 Wykład 6 Mikrokontrolery z rdzeniem ARM Plan wykładu Cortex-A9 c.d. Mikrokontrolery firmy ST Mikrokontrolery firmy NXP Mikrokontrolery firmy AnalogDevices Mikrokontrolery firmy Freescale Mikrokontrolery
Wykład 6 Mikrokontrolery z rdzeniem ARM Plan wykładu Cortex-A9 c.d. Mikrokontrolery firmy ST Mikrokontrolery firmy NXP Mikrokontrolery firmy AnalogDevices Mikrokontrolery firmy Freescale Mikrokontrolery
Technika mikroprocesorowa. W. Daca, Politechnika Szczecińska, Wydział Elektryczny, 2007/08
 Mikrokontrolery 8-bitowe Mikrokontrolery 8-bitowe stanowią wciąż najliczniejszą grupę mikrokontrolerów. Istniejące w chwili obecnej na rynku rodziny mikrokontrolerów opracowane zostały w latach 80-tych.
Mikrokontrolery 8-bitowe Mikrokontrolery 8-bitowe stanowią wciąż najliczniejszą grupę mikrokontrolerów. Istniejące w chwili obecnej na rynku rodziny mikrokontrolerów opracowane zostały w latach 80-tych.
MODUŁ UNIWERSALNY UNIV 3
 1. Cechy Moduł służy do budowy modułów systemu automatyki domowej HAPCAN. - Zawiera procesor CPU (PIC18F26K80) - Transceiver CAN MCP2551 - Układ wyprowadzeń zgodny z DIL-24 (15,24mm) - Zgodny z CAN 2.0B
1. Cechy Moduł służy do budowy modułów systemu automatyki domowej HAPCAN. - Zawiera procesor CPU (PIC18F26K80) - Transceiver CAN MCP2551 - Układ wyprowadzeń zgodny z DIL-24 (15,24mm) - Zgodny z CAN 2.0B
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2
 Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Magistrala systemowa (System Bus)
") Cezary Bolek cbolek@ki.uni.lodz.pl Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki systemowa (System Bus) Pamięć operacyjna ROM, RAM Jednostka centralna Układy we/wy In/Out Wstęp do Informatyki
Cezary Bolek cbolek@ki.uni.lodz.pl Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki systemowa (System Bus) Pamięć operacyjna ROM, RAM Jednostka centralna Układy we/wy In/Out Wstęp do Informatyki
ZL28ARM. Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC
 ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
Spis treści. Wykaz ważniejszych skrótów Wprowadzenie Rdzeń Cortex-M Rodzina mikrokontrolerów XMC
 Wykaz ważniejszych skrótów... 8 1. Wprowadzenie... 9 1.1. Wstęp... 10 1.2. Opis zawartości książki... 12 1.3. Korzyści płynące dla Czytelnika... 13 1.4. Profil Czytelnika... 13 2. Rdzeń Cortex-M0...15
Wykaz ważniejszych skrótów... 8 1. Wprowadzenie... 9 1.1. Wstęp... 10 1.2. Opis zawartości książki... 12 1.3. Korzyści płynące dla Czytelnika... 13 1.4. Profil Czytelnika... 13 2. Rdzeń Cortex-M0...15
ZL29ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).