Mikrokontrolery AVR ATmega
|
|
|
- Julian Świderski
- 9 lat temu
- Przeglądów:
Transkrypt
1 Mikrokontrolery AVR ATmega Literatura: 8-bit Microcontroller AVR with 32KBytes In-System Programmable Flash ATmega32 [ 8-bit AVR Instruction Set [ Baranowski Rafał, Mikrokontrolery AVR Atmega, BTC, Warszawa 25

2 Porty równoległe Struktura pojedynczej linii portu

3 Każdemu z portów są przyporządkowane trzy rejestry wejścia-wyjścia: PORTx- Gdy port pracuje w trybie wyjściowym stan logiczny zapisany w tym rejestrze jest stanem logicznym wymuszanym na pinie zewnętrznym, gdy port pracuje jako wejście ustawienie określonych bitów powoduje dołączenie do wejść rezystorów podciągających o ile nie jest to zablokowane bitem PUD w rejestrze SFIOR lub MCUCR. PINx- stan bitów tego portu odpowiada faktycznemu stanowi pinów ustawionych jako wejścia, gdy linia portu pracuje jako wyjście to stan odpowiadającego mu bitu rejestru PINx jest kopią bitu rejestru PORTx. DDRx- określa kierunek linii portu. Wyzerowanie bitu rejestru DDRx powoduje ustawienie linii jako wejścia, ustawienie bitu powoduje ustawienie linii jako wyjścia.

4 Port A

5 Port B

6 Port C

7 Port D

8 Bit PUD w rejestrze SFIOR umożliwia blokowanie funkcji pull-up dla wszystkich linii wszystkich portów. Możliwe ustawienia linii portu rónoległego PORTxn DDRxn PUD Kier. Port. Stan linii portu X Wejście Wysoka impedancja Wejście Wysoka impedancja Wejście Podciągnięcie rezystorem 2-5kOhm X Wyjście Wyjście w stanie L X wyjście Wyjście w stanie H

9 Cechy szczególne linii portów Port jako wejście: -histereza (około 5 mv), pozwalająca na eliminację błędów przy sygnałach wolnozmiennych i zaszumionych, -przy odczycie portu po jego zapisaniu należy odczekać około takt zegara (wewnętrzny układ synchronizujący). Port jako wyjście: -stan pinu może się pojawiać z opóźnieniem jednego taktu zegara przy zmianie PORTxn, -typowe obciążenie linii portu wynosi 2mA, maksymalnie 4mA.

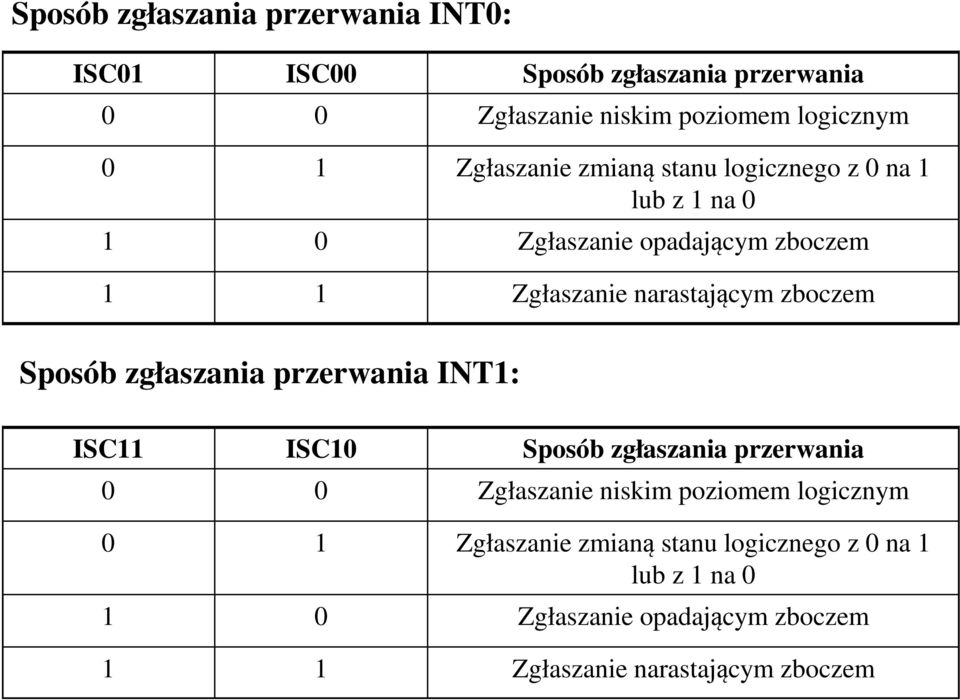
10 Moduł przerwań zewnętrznych Trzy źródła przerwań zewnętrznych- wyprowadzenia: INT INT INT2 Bity sterujące przerwaniami INT i INT w rejestrze MCUCR:

11 Sposób zgłaszania przerwania INT: ISC ISC Sposób zgłaszania przerwania Zgłaszanie niskim poziomem logicznym Zgłaszanie zmianą stanu logicznego z na lub z na Zgłaszanie opadającym zboczem Zgłaszanie narastającym zboczem Sposób zgłaszania przerwania INT: ISC ISC Sposób zgłaszania przerwania Zgłaszanie niskim poziomem logicznym Zgłaszanie zmianą stanu logicznego z na lub z na Zgłaszanie opadającym zboczem Zgłaszanie narastającym zboczem
12 Bit sterowania przerwaniem INT2 w rejestrze MCUCSR Sposób zgłaszania przerwania INT2: ISC2 Sposób zgłaszania przerwania Zgłaszanie opadającym zboczem Zgłaszanie narastającym zboczem

13 Rejestr sterowania przerwaniami zewnętrznymi INTx INT- bit maski przerwania INT (INT= i bit I= przerwanie INT odmaskowane, INT= - zamaskowane). INT- bit maski przerwania INT (INT= i bit I= przerwanie INT odmaskowane, INT= - zamaskowane). INT2- bit maski przerwania INT2 (INT2= i bit I= przerwanie INT2 odmaskowane, INT2= - zamaskowane).
.")
14 Rejestr znaczników zgłaszania przerwań zewnętrznych- GIFR INTF: bit zgłoszenia przerwania na wejściu INT, ustawiany gdy przerwanie jest odmaskowane i zgłoszone, kasowany po wejściu do procedury obsługi lub poprzez zapis jedynki logicznej. Gdy przerwanie jest aktywne poziomem bit ten nie jest ustawiany. INTF: bit zgłoszenia przerwania na wejściu INT, ustawiany gdy przerwanie jest odmaskowane i zgłoszone, kasowany po wejściu do procedury obsługi lub poprzez zapis jedynki logicznej. Gdy przerwanie jest aktywne poziomem bit ten nie jest ustawiany. INTF2: bit zgłoszenia przerwania na wejściu INT2, ustawiany gdy przerwanie jest odmaskowane i zgłoszone, kasowany po wejściu do procedury obsługi lub poprzez zapis jedynki logicznej.

15 8-mio bitowy licznik czasomierz T z funkcją PWM Źródłem sygnału taktującego mogą być: -sygnał CK z oscylatora, -sygnał CK z oscylatora podzielony prescalerem, -zewnętrzny sygnał T.

16 Schemat blokowy licznika T

17 Praca licznika T z funkcją Output Compare

18 Rejestry układu czasowo-licznikowego T Rejestr kontrolny licznika T Bity ustawiające źródło sygnału taktującego i podział prescalera: CS2 CS CS Opis Licznik zatrzymany Taktowanie CK Taktowanie CK/8 Taktowanie CK/64 Taktowanie CK/256 Taktowanie CK/24 Zewnętrzny sygnał T (opadające zbocze) Zewnętrzny sygnał T (narastające zbocze)
 Zewnętrzny sygnał T")
19 Tryb generacji sygnału WGM WGM Opis Zwykłą praca licznika PWM z korekcją fazy Porównanie z zerowaniem licznika Szybki PWM Tryb funkcji Output Compare gdy tryb PWM wyłączony COM COM Opis Pin odłączony Zmiana stanu logicznego na pinie Zerowanie pinu Ustawienie pinu

20 Rejestr licznika T- TCNT Rejestr porównawczy- OCR

21 Rejestr maski przerwań od liczników czasomierzy-timsk BIT: OCIE- bit maski przerwania od funkcji Output-Compare licznika T BIT: TOIEO- bit maski przerwania od przepełnienia licznika T Rejestr znaczników przerwań od liczników-czasomierzy- TIFR BIT: OCF- bit zgłoszenia przerwania od funkcji Output-Compare licznika T BIT: OCFO- bit zgłoszenia przerwania od przepełnienia licznika T
22 Prescaler licznika T i T Schemat blokowy
23 Rejestr specjalny SFIOR- zerowanie prescalera Ustawienie bitu - PSR, w rejestrze SFIOR powoduje wyzerowanie prescalera licznika T i T
24 6-to bitowy licznik czasomierz T z funkcją PWM Schemat blokowy
25 Funkcja Input Capture (zatrzaskiwanie stanu licznika) Schemat blokowy
26 Funkcja Output Compare Schemat blokowy
27 Rejestr kontrolny A licznika T- TCCRA Tryb funkcji Output Compare gdy tryb PWM wyłączony COMA/ COMB COMA/ COMB Opis Piny odłączone, normalne funkcje portu Zmiana stanu logicznego na pinie Zerowanie pinu Ustawienie pinu
28 Tryb funkcji Output Compare gdy tryb Szybki PWM COMA/ COMB COMA/ COMB Opis Piny odłączone, normalne funkcje portu W zależności od bitów WGM Wyjście A w funkcji OC wyjście B normalny pinportu, oba piny jako linie portu Tryb nieodwracający Tryb odwracający
29 Tryb funkcji Output Compare gdy tryb PWM z korekcją fazy oraz z korekcją fazy i częstotliwości COMA/ COMB COMA/ COMB Opis Piny odłączone, normalne funkcje portu W zależności od bitów WGM Wyjście A w funkcji OC wyjście B normalny pinportu, oba piny jako linie portu Zerowanie pinu przy zliczaniu w dół, ustawianie przy zliczaniu w górę Ustawianie pinu przy zliczaniu w dół, zerowanie przy zliczaniu w górę
30 Tryb generacji sygnału na wyjściach A i B
31 Rejestr kontrolny B licznika T- TCCRB ICNC- włączanie filtracji wejścia Input Capture ICES- Wybór zbocza wejścia Input Capture (gdy opadające zbocze, gdy - narastające zbocze) WGM3, WGM2- tryb generacji przebiegu CS2-CS- wybór źródła taktowania zgodnie z tabelą
32 Źródła taktowania licznika T
33 Rejestr licznika T Rejestr porównawczy funkcji Output-Compare Ai B
34 Rejestr zatrzaskowy funkcji Input Capture licznika T Rejestr maski przerwań od układów czasowo-licznikowych- TIMSK TICIE- maska przerwań od funkcji Input Capture licznika T OCIEA- maska przerwań od funkcji Output Compare A OCIEB- maska przerwań od funkcji Output Compare B
35 TOIE- maska przerwań od przepełnienia licznika T Rejestr bitów zgłaszania przerwań od licznika T-TIFR ICF- znacznik zgłoszenia przerwania od funkcji Input Capture licznika T OCFA- znacznik zgłoszenia przerwania od funkcji Output Compare A OCFB- znacznik zgłoszenia przerwania od funkcji Output Compare B TOV- znacznik zgłoszenia przerwania od przepełnienia licznika T
36 8-mio bitowy układ czasowo-licznikowy T2 z możliwością pracy asynchronicznej Schemat blokowy układu licznika T2
37 Rejestr sterujący licznika T2- TCCR2 Rejestr licznika T2- TCNT2 Rejestr porównawczy funkcji Output Compare licznika T2- OCR2
38 Status trybu asynchronicznego- ASSR Rejestr maski przerwań układu czasowo-licznikowego OCIE maska przerwań od funkcji Output Compare licznika T2 TOIE maska przerwań od przepełnienia licznika T2
39 Rejestr zgłaszania przerwań od licznika T2-TIFR OCF znacznik zgłoszenia przerwania od funkcji Output Compare licznika T2 TOV znacznik zgłoszenia przerwania od przepełnienia licznika T2
40 Prescaler licznika T2 Schemat blokowy układu prescalera
41 Bit zerowania prescalera licznika T2 w rejestrze SFIOR
42 Synchroniczny port szeregowy SPI Schemat blokowy portu
43 Połączenie urządzeń nadrzędnych (Master) i podrzędnych (Slave) przy pomocy portu SPI Układ nadrzędny (Master) jest źródłem sygnału taktującego oraz układem dokonującym wyboru układu Slave (podrzędnego). Linia MISO układu nadrzędnego jest połączona z linią MISO układu podrzędnego i podobnie linia MOSI układu Master jest połączona z linią MOSI układu Slave. Sygnał SS w przypadku układów master wykrywa konflikty na magistrali gdy dwa układy Master chcą skorzystać z magistrali SPI.
44 Rejestr sterujący układu SPI- SPCR SPIE- bit maski przerwań od portu SPI SPE- bit uaktywnienia portu SPI (gdy bit SPE= port wyłączony) DORD- decyduje o kolejności wysyłania bitów danej (gdy DORD= dana jest transmitowana od najstarszego (MSB) bitu MSTR- Wybór funkcji układu- nadrzędny lub podrzędny (gdy MSTR= - Slave, gdy MSTR= - Master) CPOL- Polaryzacja zegara- ustalenie stanu nieaktywnego na linii SCK (gdy CPOL= nieaktywny stan na linii SK to stan niski) CPHA- faza zegara determinuje kiedy dana jest próbkowana (podczas pierwszego lub ostatniego zbocza zegara)
45 SPR, SPR, wybór częstotliwości taktowania portu SPI SPI2X SPR SPR Częstotliwość zegara portu SPI- SCK fosc/4 fosc/6 fosc/64 fosc/28 fosc/2 fosc/8 fosc/32 fosc/64
46 Rejestr statutowy portu SPI SPIF- znacznik zgłoszenia przerwania od portu SPI- ustawiany po zakończeniu transmisji prze port SPI WCOL- bit kolizji przy zapisie portu SPI SPI2X- bit podwojenia prędkości transmisji przez port SPI (sygnału SCK), SPI2X podwaja prędkość transmisji Rejestr danych portu SPI
47 Port szeregowy synchroniczny-asynchroniczny USART Możliwość pracy synchronicznej i synchronicznej Ramka od 5 do 9 bitów lub 2 bity stopu Dwa rodzaje kontroli parzystości Wykrywanie błędu ramki Eliminacja szumów Możliwość współpracy wieloprocesorowej
48 Schemat blokowy portu USART
49 Tryb pracy synchronicznej Ramka transmisji
50 Próbkowanie bitu startu Próbkowanie bitu danych i parzystości
51 Próbkowanie bitu stopu
52 Rejestry: nadawczy i odbiorczy portu USART- UDR Rejestr nadawczy i odbiorczy znajdują się pod tym samym adresem dostęp do rejestru jest rozpoznawany kierunkiem transferu danych (rejestr odbiorczy-odczyt, nadawczy-zapis) Rejestr kontrolno-sterujący portu USART: A- UCSRA
53 RXC- bit informujący o skompletowaniu danej odbieranej TXC- bit informujący o wysłaniu całej danej UDRE- bit informujący, że bufor nadawania jest gotowy do przyjęcia nowej danej FE- bit zgłoszenia błędu ramki (ustawiany gdy w oczekiwanym czasie nie pojawił się bit stopu) DOR- bit zgłoszenia błędu nadpisania (dana odbierana jest skompletowana, a wykryto bit startu nowej danej odbieranej) PE- błąd parzystości U2X- podwojenie prędkości transmisji w trybie asynchronicznym MPCM- bit współpracy wieloprocesorowej
54 Rejestr kontrolno-sterujący portu USART: B- UCSRB RXCIE- bit maski przerwania od skompletowania danej odbieranej TXCIE- bit maski przerwania od wysłania danej UDRIE- bit maski przerwania od pustego rejestru danych RXEN- włączanie odbiornika portu USART (zapis ) TXEN- włączanie nadajnika portu USART (zapis ) UCSZ2- jeden z bitów określających rozmiar danej RXB8-9-ty bit odbierany TXB8-9-ty bit nadawany
55 Rejestr kontrolno-sterujący portu USART: C- UCSRC URSEL- bit dostępu do rejestru UCSRC i UBRRH, ustawienie na zapewnia dostęp do rejestru UCSRC. Oba rejestry mają ten sam adres. UMSEL- wybór trybu synchronicznego lub asynchronicznego, tryb asynchroniczny. UPM, UPM- wybór rodzaju kontroli parzystości: wyłączona, parzystość parzysta, parzystość nieparzysta USBS- ilość bitów stopu: - bit stopu, - 2 bity stopu UCSZ, UCSZ- wybór ilości bitów danej
56 UCSZ2 UCSZ UCSZ Długość danej 5-bitów 6-bitów 7-bitów 8-bitów rezerwa rezerwa rezerwa 9-bitów Określenie wielkości danej
57 UCPOL- tylko w modzie synchronicznym określa polaryzację sygnału zegarowego Rejestr prędkości bodowej URSEL- bit określający dostęp do starszej lub młodszej części rejestru. Przy zapisie do UBRRH powinien być ustawiony w stan niski
58 Przykładowe prędkości bodowe
59 Przykładowe prędkości bodowe
60 Interfejs magistrali dwuliniowej (I2C) Przykładowe połączenie układów na magistrali I2C
61 Współzależność między sygnałami SDA i SCL
62 Sekwencje Start i Stop Adresacja urządzenia
63 Przesyłanie danych
64 Typowa ramka transmisji danych
65 Arbitraż w przypadku dwóch układów Master
66 Schemat blokowy układu interfejsu magistrali I2C
67 Rejestr określający prędkość transmisji na magistrali- TWBR Rejestr kontrolny interfejsu magistrali I2C
68 TWINT- bit sygnalizujący koniec czynności na magistrali I2C TWEA- bit zezwalający na generację sygnału akceptacji ACK TWSTA- generacja sekwencji START (sprawdza zajętość linii SDA) kasowany programowo TWSTO- generacja sekwencji STOP TWWC- bit detekcji kolizji na magistrali TWEN- włączenie interfejsu I2C (aktywny stan wysoki) TWIE- bit maski przerwań od interfejsu I2C
69 Rejestr statusowy magistrali I2C TWPS, TWPS- bity sterowania prescalerem TWS7-TWS3- bity statusu interfejsu I2C
70 Przebieg transmisji na magistrali I2C- obsługa programowa
71
72
73 Przykłady statusu interfejsu I2C
74 Rejestr danych Rejestr adresu układu Slave TWGCE- bit wywołania ogólnego
75 Komparator analogowy Schemat blokowy
76 Rejestr specjalny SFIOR ACME- wybór wejścia odwracającego komparatora. ACME= wejście AIN Rejestr kontrolno-sterujący ACSR ACD- blokada komparatora ACBG- dołączanie wejścia nieodwracającego do pinu AIN lub do napięcia referencyjnego
77 AC- dołączenie wyjścia komparatora AC (z synchronizacją) ACI- bit zgłoszenia przerwania ACIE- bit maski przerwania od komparatora ACIC- dołączenie wyjścia komparatora do funkcji Input Capture ACIS, ACIS- tryb zgłaszania przerwań
78 Multipleksowane wejście komparatora
79 Przetwornik AC Cechy: -rozdzielczość bitów, -mała nieliniowość-,5 LSB, -dokładność +-2LSB, -czas konwersji od 3 us do 26 us, -7 wejść różnicowych, -2 wejścia różnicowe z regulacją wzmocnienia x i x2, -wybierane źródło napięcia referencyjnego, -Możliwość wyboru źródła wyzwalania.
80
81
82 Zawartość rejestru ADMUX Wybór źródła napięcia referencyjnego
83 Bit5- ADLAR: decyduje o sposobie umieszczenia bitowego wyniku konwersji w rejestrach wynikowych. Bit4- MUX 4:- decydują o sposobie dołączenia multipleksowanych wejść do przetwornika.

84 Konfiguracja połączeń wejść do przetwornika

85
86 Rejestr kontrolno statusowy przetwornika AC- ADCSRA
87 Bit7- ADEN: włączanie wyłączanie przetwornika AC (stan niskiprzetwornik wyłączony), Bit6- ADSC: bit startu konwersji: -w przypadku konwersji ciągłej wyzwala pierwszą konwersję, -w przypadku trybu pracy pojedynczej konwersji wyzwala każdą z nich. -Bit5- ADATE: bit zezwalający na auto wyzwalanie konwersji przy pomocy dodatniego zbocza wybranego źródła wyzwalania, określonego bitami ADTS. Bit4- ADIF: bit zgłoszenia przerwania końca konwersji przetwornika AC i zapisu wyniku (w interakcji wykonywana jest procedura obsługi, o ile bit ADIE jest ustawiony i bit I w rejestrze SREG jest ustawiony. Bit3- ADIE- bit maski przerwania od przetwornika AC Bit-y 2-: ADSP2:: bity prescalera taktującego przetwornik AC
88 Możliwości ustawienia prescalera przetwornika AC
89 Przebiegi czasowe pojedynczej konwersji
90 Przebiegi czasowe przy wyzwalaniu ciągłym
91 Schemat blokowy prescalera układu taktowania przetwornika AC
92 Dwa różne formaty zapisu wyniku przetwarzania w rejestrach wynikowych.
93 Rejestr sterujący sposobem wyzwalania przetwornika AC-SFIOR Źródła wyzwalania konwersji przetwornika AC
94 Połączenia elektryczne przy wykorzystaniu przetwornika AC
95 Najczęściej spotykane bity konfiguracyjne Nazwa BODEN BODLEVEL (2..) BOOTSZ (..) CKDIV8 CKOPT CKOUT CKSEL (3..) DWEN Opis Włącza układ zerujący w przypadku nieodpowiedniego zasilania Ustawia poziom zadziałania BODEN Wielkość sekcji boot loadrea Włącza dzielenie zegara systemowego przez 8 Wymuszenie pracy oscylatora w pełnym zakresie napięć Dołącza wewnętrzny sygnał zegarowy do wyprowadzenia CLK Źródło zegara systemowego Włącza obsługę jednoprzewodowego interfejsu uruchomieniowego debugwire Stan domyślny (włączony) (dzielenie przez 8) (oscylacje ograniczone) (CLK jako port we-wy) (wew. Oscylator RC) (wyłączony)
96 Nazwa EESAVE JTAGEN OCDEN RSTDISBL SELFPRGEN SPIEN SUT (..) WDTON Opis Wymuszenie zachowania EEPROM przy kasowaniu pamięci mikrokontrolera Uaktywnia interfejs JTAG Włącza tryb uruchomieniowy (On Chip Debug) Przełącza linie RSET do trybu pracy jako port we-wy Odblokowuje instrukcję programowania pamięci programu SPM Włącza możliwość odczytu i programowanie przez SPI Ustala opóźnienie działania po włączeniu zasilania Uaktywnia układ Watch Dog Stan domyślny (nie zachowuje) (JTAG włączony) (OCD zablokowany) (RESETzerowanie) (spm zablokowane) (SPI włączone) (Watch Dog aktywny z poziomu programu)
97 Bity zabezpieczające Zabezpieczenie pamięci Flash i EEPROM przy dostępie zewnętrznym LB2 LB Znaczenie Brak zabezpieczeń Zapis pamięci niedozwolony Zapis, odczyt i weryfikacja pamięci niedozwolone
98 Ograniczenie dostępu do pamięci programu instrukcjami LPM i SPM BLB2 BLB Dostęp do programu aplikacji BLB2 BLB Dostęp do programu boot loadera Znaczenie Brak zabezpieczeń. Zapis sekcji aplikacji niedozwolony. Zapis sekcji aplikacji niedozwolony, Program boot loadrea nie może odczytywać sekcji aplikacji. Program boot loadrea nie może odczytywać sekcji aplikacji. Brak zabezpieczeń. Zapis sekcji boot loadrea niedozwolony. Zapis sekcji boot loadera niedozwolony. Program aplikacji nie może odczytywać sekcji boot loadera. Program aplikacji nie może odczytywać sekcji boot loadera.
99 Układy zarządzania energią Ograniczenie poboru mocy: -zredukowanie częstotliwości zegara, -wykorzystania trybów wstrzymania (sleep modes). Wstrzymywanie systemu możliwe przy użyciu instrukcji SLEEP. Interakcje w mikrokontrolerze: -nie pracuje jednostka centralna, -pamięć danych zachowywana, -rejestry wejścia wyjścia zachowywane, -układy peryferyjne pracują w zależności od trybu uśpienia.
100 Wyjście z trybu uśpienia: -poprzez jeden z sygnałów zerujących RESET, -przez przerwanie (wtedy wejście do procedury obsługi i powrót do następnej instrukcji po sleep).
101 Tryby uśpienia układu SM2 SM SM Tryb Opis Idle CPU wstrzymane ADC noise reduction CPU wyłączone, USART i SPI wyłączone, powrót przez przerwanie od przetwornika Power-down Większość peryferiów wyłączonych, CPU wyłączone, zegar systemowy wyłączony, działają układy asynchroniczne względem głównego zegara np.. TWI. Power-save Jak Power-down lecz działanie licznika T w trybie asynchronicznym możliwe. Standby Jak Power-down, zewnętrzny rezonator, zegar systemowy pracuje Extended standby Jak Power-save, zewnętrzny rezonator, zegar systemowy pracuje
102 Wstrzymywanie pracy poszczególnych modułów Bity sterujące rejestru PRR PRTWI PRTIM2 PRTIMO PRLCD PRTIM PRSPI PRUSAR T PRADC PRTWI- wstrzymywanie portu I2C PRTIM2- wstrzymywanie licznika T2 PRTIM- wstrzymywanie licznika T PRLCD- wyłączanie interfejsu LCD PRTIM- wstrzymywanie licznika T PRSPI- wstrzymywanie portu SPI PRUSART- wstrzymywanie interfejsu USART PRADC- wstrzymywanie przetwornika AC
103 Pamięć programu flash W przypadku stosowania programu Boot-loadrea obszar pamięci programu można podzielić na dwa obszary: Sekcja RWW (Read-While-Write), Sekcja NRWW (No-Read-While_Write). Jeśli w danym momencie trwa zapis RWW (dolna część pamięci programu), odczyt górnej części NRWW jest niemożliwy.

104 Organizacja pamięci programu- flash
105 Zapis pamięci programu- Flash Do zapisu pamięci programu służy rozkaz: SPM Rejestrem sterującym pracą rozkazu SPM jest rejestr sterujący SPMCR lub SPMCSR SPMIE RWWSB - RWWSRE BLBSET PGWRT PGERS SPMEN Bit7- SPMIE: bit maski przerwania przy gotowości do zapisu. Bit6- RWWSB: zajętość sekcji RWW (trwa zapis) Bit4- RWWSRE: zwalnianie zajętości obszaru RWW Bit3- BBSET: programowanie i odczyt bitów strujących Bit2- PGWRT: zapis strony pamięci programu Bit- PGERS: kasowanie strony pamięci programu Bit- SPMEN: zezwolenie na zapis
106 Układ kontroli poprawności wykonywania programu Watch-Dog Układ jest taktowany odrębnym wewnętrznym sygnałem zegarowym o częstotliwości MHz. Schemat blokowy układu Watch-Dog
107 Rejestr kontrolny układu Watch-Dog: WDTCR Bit4- WDTOE: bit zabezpieczający przed przypadkowym wyłączeniem modułu WDT, musi być ustawiony najwcześniej na cztery takty zegara przed wyłączeniem WDT Bit3- WDE: włączanie WDT (przy wyłączeniu należy ustawić bit WDTOE) Bit2..- WDP 2..: nastawa prescalera WDT W nowszych wersjach układu ATmega dodano bity: Zwiększający ilość kombinacji prescalera, maskę przerwania od układu WDT, bit zgłoszenia przerwania od WDT.
108 Możliwości nastawy prescalera Watch Doga
109 Informacje o przeszłości działania mikrokontrolera sprzed zerowania. Rejestr specjalny MCUSCR Bit4- JTRF: powodem zerowania była komenda zerująca interfejsu JAG, Bit3- WDRF: powodem zerowania było przepełnienia Watch-Doga, Bit2- BORF: powodem zerowania było nieprawidłowe napięcie zasilające, Bit- EXTRF: powodem zerowania zewnętrzny sygnał RESET, Bit- PORF: nastąpiło wyłączenie zasilania.
110 Port JTAG mikrokontrolera
111 Rejestr identyfikatora układu Numer serii Informacje o producencie
112 Rejestr kontrolno sterujący- MCUCSR Bit7- JTD: wyłączanie interfejsu JTAG Bit4- JTRF: bit informujący o zerowaniu od JTAG Rejestr kontrolno sterujący- OCDR Bit włączenia debagowania programu
113 Interfejsy programowania i uruchomieniowe Równoległy interfejs programowania.
114 Interfejs programowania SPI
115 Interfejs JTAG
116 Kodowanie stałoprzecinkowe liczb ułamkowych Kod.7 Bit Waga +/- +/2 +/4 +/8 +/6 +/32 +/64 +/28,5,25,25,625,325,5625,7825 Dla liczb ze znakiem zakres kodowania wynosi od do +, Dla liczb bez znaku zakres wynosi od do, Kod.5 Liczba 6-to bitowa
117 Sterowanie wyświetlaczem LCD z magistralą równoległą 4/8 bit Wyprowadzenia LCD ze sterownikiem HD4478 [Źródło:
118 Funkcje wyprowadzeń [Źródło:
119 Instrukcje wyświetlacza

120 Funkcje bitów
Mikrokontrolery AVR ATmega
 Mikrokontrolery AVR ATmega Literatura: 8-bit Microcontroller AVR with 32KBytes In-System Programmable Flash ATmega32 [www.atmel.com] 8-bit AVR Instruction Set [www.atmel.com] Baranowski Rafał, Mikrokontrolery
Mikrokontrolery AVR ATmega Literatura: 8-bit Microcontroller AVR with 32KBytes In-System Programmable Flash ATmega32 [www.atmel.com] 8-bit AVR Instruction Set [www.atmel.com] Baranowski Rafał, Mikrokontrolery
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy peryferyjne cz. 1 Wykład 7
 Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Wbudowane układy peryferyjne cz. 3 Wykład 9
 Wbudowane układy peryferyjne cz. 3 Wykład 9 Komparator analogowy Komparator analogowy 2 Komparator analogowy Pozwala porównać napięcia na wejściu dodatnim i ujemnym Przerwanie może być wywołane obniżeniem
Wbudowane układy peryferyjne cz. 3 Wykład 9 Komparator analogowy Komparator analogowy 2 Komparator analogowy Pozwala porównać napięcia na wejściu dodatnim i ujemnym Przerwanie może być wywołane obniżeniem
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1
 Dodatek C 1. Timer 8-bitowy (Timer0) 1.1. Opis układu Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1 Rys. 1. Schemat blokowy timera Źródłem sygnału taktującego może być zegar
Dodatek C 1. Timer 8-bitowy (Timer0) 1.1. Opis układu Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1 Rys. 1. Schemat blokowy timera Źródłem sygnału taktującego może być zegar
Wbudowane układy peryferyjne cz. 2 Wykład 8
 Wbudowane układy peryferyjne cz. 2 Wykład 8 Timery Timery (liczniki) 2 Timery informacje ogólne Mikrokontroler ATmega32 posiada 3 liczniki: Timer0 8-bitowy Timer1 16-bitowy Timer2 8-bitowy, mogący pracować
Wbudowane układy peryferyjne cz. 2 Wykład 8 Timery Timery (liczniki) 2 Timery informacje ogólne Mikrokontroler ATmega32 posiada 3 liczniki: Timer0 8-bitowy Timer1 16-bitowy Timer2 8-bitowy, mogący pracować
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2
 Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Inne układy peryferyjne AVR
 Inne układy peryferyjne AVR Komparator analogowy Komparator rodzaj prostego przetwornika A/C blok pozwalający na dokonanie 1-bitowej konwersji sygnału z postaci analogowej na cyfrową, czyli sprawdzenia
Inne układy peryferyjne AVR Komparator analogowy Komparator rodzaj prostego przetwornika A/C blok pozwalający na dokonanie 1-bitowej konwersji sygnału z postaci analogowej na cyfrową, czyli sprawdzenia
Układ transmisji szeregowej AVR
 Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Programowanie mikrokontrolerów. 15 stycznia 2008
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Podstawy systemów mikroprocesorowych. Interfejs USART. Interfejsy szeregowe w mikrokontrolerach AVR
 Podstawy systemów mikroprocesorowych Wykład nr 4 Interfejsy szeregowe dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Komputery przesyłają dane na dwa sposoby: równolegle: Kilka bitów danych
Podstawy systemów mikroprocesorowych Wykład nr 4 Interfejsy szeregowe dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Komputery przesyłają dane na dwa sposoby: równolegle: Kilka bitów danych
PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery System przerwań laboratorium: 11 autorzy: dr hab. Zbisław Tabor, prof. PK mgr inż.
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery System przerwań laboratorium: 11 autorzy: dr hab. Zbisław Tabor, prof. PK mgr inż.
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Programowanie mikrokontrolerów. 5 grudnia 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 5 grudnia 2007 Przerwania Umożliwiają asynchroniczną obsługę różnych zdarzeń, np.: zmiana stanu wejścia, zakończenie przetwarzania analogowo-cyfrowego,
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 5 grudnia 2007 Przerwania Umożliwiają asynchroniczną obsługę różnych zdarzeń, np.: zmiana stanu wejścia, zakończenie przetwarzania analogowo-cyfrowego,
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Dokumentacja mikrokontrolera Atmega16 firmy Atmel
 Katedra Metrologii i Systemów Elektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej LABORATORIUM MIKROSTEROWNIKI I MIKROSYSTEMY ROZPROSZONE Dokumentacja mikrokontrolera
Katedra Metrologii i Systemów Elektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej LABORATORIUM MIKROSTEROWNIKI I MIKROSYSTEMY ROZPROSZONE Dokumentacja mikrokontrolera
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
LABORATORIUM. TIMERY w mikrokontrolerach Atmega16-32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA TIMERY w mikrokontrolerach Atmega16-32 Opracował:
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA TIMERY w mikrokontrolerach Atmega16-32 Opracował:
SYSTEM PRZERWAŃ ATmega 32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA SYSTEM PRZERWAŃ ATmega 32 Opracował: mgr inż.
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA SYSTEM PRZERWAŃ ATmega 32 Opracował: mgr inż.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów...2 2. ISP...2 3. I/O Ports...3 4. External Interrupts...4 5. Analog Comparator...5 6. Analog-to-Digital Converter...6
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów...2 2. ISP...2 3. I/O Ports...3 4. External Interrupts...4 5. Analog Comparator...5 6. Analog-to-Digital Converter...6
LABORATORIUM. TIMERY w mikrokontrolerach Atmega16-32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA TIMERY w mikrokontrolerach Atmega16-32 Opracował:
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA TIMERY w mikrokontrolerach Atmega16-32 Opracował:
Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy
 Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji
Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Przetworniki analogowo-cyfrowe (A/C)
") Przetworniki analogowo-cyfrowe (A/C) Przetworniki analogowo-cyfrowe to urządzenia, przetwarzające ciągły analogowy sygnał wejściowy jedno wejście na odpowiadający mu dyskretny cyfrowy sygnał wyjściowy
Przetworniki analogowo-cyfrowe (A/C) Przetworniki analogowo-cyfrowe to urządzenia, przetwarzające ciągły analogowy sygnał wejściowy jedno wejście na odpowiadający mu dyskretny cyfrowy sygnał wyjściowy
Magistrala SPI. Linie MOSI i MISO sąwspólne dla wszystkich urządzeńna magistrali, linia SS jest prowadzona do każdego Slave oddzielnie.
 Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1.
 Dodatek D 1. Przetwornik analogowo-cyfrowy 1.1. Schemat blokowy Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1. Rys. 1. Schemat blokowy przetwornika A/C Przetwornik
Dodatek D 1. Przetwornik analogowo-cyfrowy 1.1. Schemat blokowy Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1. Rys. 1. Schemat blokowy przetwornika A/C Przetwornik
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
16. Szeregowy interfejs SPI
 16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
Układy czasowe / liczniki (timers/counters)
") Układy czasowe / liczniki (timers/counters) Współpraca MK z otoczeniem w czasie rzeczywistym wymaga odliczania czasu, zliczania zdarzeń lub generowania złożonych sekwencji binarnych. Funkcje te realizowane
Układy czasowe / liczniki (timers/counters) Współpraca MK z otoczeniem w czasie rzeczywistym wymaga odliczania czasu, zliczania zdarzeń lub generowania złożonych sekwencji binarnych. Funkcje te realizowane
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Czujnik zbliżeniowy indukcyjny
 Czujnik zbliżeniowy indukcyjny Wizualizacja Danych Sensorycznych Projekt Łukasz Adamczuk (133047) 1. Wstęp. Czujniki indukcyjne zbliżeniowe są elementami automatyki reagującymi na wprowadzenie metalu w
Czujnik zbliżeniowy indukcyjny Wizualizacja Danych Sensorycznych Projekt Łukasz Adamczuk (133047) 1. Wstęp. Czujniki indukcyjne zbliżeniowe są elementami automatyki reagującymi na wprowadzenie metalu w
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Stanowisko laboratoryjne dla mikrokontrolera Atmega16 firmy Atmel
 Katedra Metrologii i Optoelektroniki Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska LABORATORIUM MIKROKONTROLERY I MIKROSYSTEMY Stanowisko laboratoryjne dla mikrokontrolera Atmega16
Katedra Metrologii i Optoelektroniki Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska LABORATORIUM MIKROKONTROLERY I MIKROSYSTEMY Stanowisko laboratoryjne dla mikrokontrolera Atmega16
Podstawy systemów mikroprocesorowych
 Podstawy systemów mikroprocesorowych Wykład nr 6 Wszystko, co jeszcze chcielibyście wiedzieć o mikrokontrolerach, ale wolicie nie pytać (bo jeszcze będzie na kolokwium?) dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html
Podstawy systemów mikroprocesorowych Wykład nr 6 Wszystko, co jeszcze chcielibyście wiedzieć o mikrokontrolerach, ale wolicie nie pytać (bo jeszcze będzie na kolokwium?) dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Podstawy Techniki Mikroprocesorowej Laboratorium
 Laboratorium Ćwiczenie 3 Liczniki 0, 1, 2 (Timer Counters T/C0, T/C1, T/C2) Program ćwiczenia: obsługa trybu pracy normalny wybranego licznika, obsługa trybu pracy CTC wybranego licznika, obsługa trybu
Laboratorium Ćwiczenie 3 Liczniki 0, 1, 2 (Timer Counters T/C0, T/C1, T/C2) Program ćwiczenia: obsługa trybu pracy normalny wybranego licznika, obsługa trybu pracy CTC wybranego licznika, obsługa trybu
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Współpraca procesora ColdFire z urządzeniami peryferyjnymi
 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Omówimy przykłady 8-mio bitowego licznika z wyposażenia ADuC812 (CISC 51) oraz mikrokontrolera ATMega128 należącego do rodziny AVR.
 oraz mikrokontrolera ATMega128 należącego do rodziny AVR.") Liczniki/czasomierze (T/C) należą do standardowego składu wewnętrznych układów peryferyjnych (WEP) mikrokontrolerów. Często różnią się znacznie pod względem funkcji, które rozszerzają proste zliczanie
Liczniki/czasomierze (T/C) należą do standardowego składu wewnętrznych układów peryferyjnych (WEP) mikrokontrolerów. Często różnią się znacznie pod względem funkcji, które rozszerzają proste zliczanie
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
Programowanie w językach asemblera i C
 Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
2010-04-12. Magistrala LIN
 Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Expandery wejść MCP23S17 oraz MCP23017
 Expandery wejść MCP23S17 oraz MCP23017 Expander I/O MCP20S17 I2C Piny wyjściowe expanderów MCP23S17 oraz MCP23017 Expander I/O MCP23S17 SPI Podłączenie urządzenia na magistrali SPI z płytą Arduino. Linie
Expandery wejść MCP23S17 oraz MCP23017 Expander I/O MCP20S17 I2C Piny wyjściowe expanderów MCP23S17 oraz MCP23017 Expander I/O MCP23S17 SPI Podłączenie urządzenia na magistrali SPI z płytą Arduino. Linie
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
MIKROPROCESORY architektura i programowanie
 Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Systemy wbudowane Mikrokontrolery
 Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów...2 2. ISP...2 3. I/O Ports...3 4. External Interrupts...4 5. Analog Comparator...6 6. Analog-to-Digital Converter...6
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów...2 2. ISP...2 3. I/O Ports...3 4. External Interrupts...4 5. Analog Comparator...6 6. Analog-to-Digital Converter...6
MIKROKONTROLERY - MAGISTRALE SZEREGOWE
 Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Mikrokontrolery AVR techniczne aspekty programowania
 Andrzej Pawluczuk Mikrokontrolery AVR techniczne aspekty programowania Białystok, 2004 Mikrokontrolery rodziny AVR integrują w swojej strukturze między innymi nieulotną pamięć przeznaczoną na program (pamięć
Andrzej Pawluczuk Mikrokontrolery AVR techniczne aspekty programowania Białystok, 2004 Mikrokontrolery rodziny AVR integrują w swojej strukturze między innymi nieulotną pamięć przeznaczoną na program (pamięć
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania. Sterowniki Urządzeń Mechatronicznych laboratorium. Ćw. 3: Timer v1.0
 1 CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z możliwościami odmierzania czasu za pomocą wewnętrznego TIMER a mikrokontrolerów serii AVR 2 ZAKRES NIEZBĘDNYCH WIADOMOŚCI - wiadomości z poprzednich
1 CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z możliwościami odmierzania czasu za pomocą wewnętrznego TIMER a mikrokontrolerów serii AVR 2 ZAKRES NIEZBĘDNYCH WIADOMOŚCI - wiadomości z poprzednich
1. Porty wejścia wyjścia (I/O)
") 1. Porty wejścia wyjścia (I/O) Z uwagi na budowę wewnętrzną CPU, a w szczególności długość rejestrów i szerokość szyny danych porty mają najczęściej budowę 8-bitową. Niektóre z nich mogą pracować jako
1. Porty wejścia wyjścia (I/O) Z uwagi na budowę wewnętrzną CPU, a w szczególności długość rejestrów i szerokość szyny danych porty mają najczęściej budowę 8-bitową. Niektóre z nich mogą pracować jako
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Zastosowanie przetwornika analogowo-cyfrowego do odczytywania napięcia z potencjometru
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Zastosowanie przetwornika analogowo-cyfrowego do odczytywania napięcia z potencjometru
Przerwania, polling, timery - wykład 9
 SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Przykładowa struktura systemu mikroprocesorowego IRQ AcDMA ReDMA Generator zegarowy fx fcpu fio fm System przerwań sprzętowych IRQ Bezpośredni dostęp do pamięci
Układy zegarowe w systemie mikroprocesorowym 1 Przykładowa struktura systemu mikroprocesorowego IRQ AcDMA ReDMA Generator zegarowy fx fcpu fio fm System przerwań sprzętowych IRQ Bezpośredni dostęp do pamięci
2. PORTY WEJŚCIA/WYJŚCIA (I/O)
") 2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Przerwanie. Źródła przerwań
 Podstawy systemów mikroprocesorowych Wykład nr 3 Przerwania i liczniki dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html fronczak@if.pw.edu.pl Przerwanie Warunek lub zdarzenie, które przerywa
Podstawy systemów mikroprocesorowych Wykład nr 3 Przerwania i liczniki dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html fronczak@if.pw.edu.pl Przerwanie Warunek lub zdarzenie, które przerywa
MAGISTRALE MIKROKONTROLERÓW (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska") (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
(BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola
 Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola Struktura systemu 68008 z układami peryferyjnymi 6821, 6050 Na rysunku 1.1 pokazano strukturę stanowiska z interfejsami
Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola Struktura systemu 68008 z układami peryferyjnymi 6821, 6050 Na rysunku 1.1 pokazano strukturę stanowiska z interfejsami
Enkoder magnetyczny AS5040.
 Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
AVR DRAGON. INSTRUKCJA OBSŁUGI (wersja 1.0)
") AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD.
 13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
MIKROPROCESORY architektura i programowanie
 Systematyczny przegląd. (CISC) SFR umieszczane są w wewnętrznej pamięci danych (80H 0FFH). Adresowanie wyłącznie bezpośrednie. Rejestry o adresach podzielnych przez 8 są też dostępne bitowo. Adres n-tego
Systematyczny przegląd. (CISC) SFR umieszczane są w wewnętrznej pamięci danych (80H 0FFH). Adresowanie wyłącznie bezpośrednie. Rejestry o adresach podzielnych przez 8 są też dostępne bitowo. Adres n-tego
Technika mikroprocesorowa I Wykład 4
 Technika mikroprocesorowa I Wykład 4 Układ czasowo licznikowy 8253 INTEL [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf] Wyprowadzenia układu [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf]
Technika mikroprocesorowa I Wykład 4 Układ czasowo licznikowy 8253 INTEL [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf] Wyprowadzenia układu [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf]
Systemy wbudowane. Wprowadzenie. Struktura. Mikrokontrolery AVR. Wprowadzenie do programowania w C
 Systemy wbudowane Mikrokontrolery AVR Wprowadzenie do programowania w C dr inż. Maciej Piechowiak Wprowadzenie język C jest językiem strukturalnym wysokiego poziomu, jednak działającym blisko sprzętu i
Systemy wbudowane Mikrokontrolery AVR Wprowadzenie do programowania w C dr inż. Maciej Piechowiak Wprowadzenie język C jest językiem strukturalnym wysokiego poziomu, jednak działającym blisko sprzętu i
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Problematyka sieci miejscowej LIN
 Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,