Autonomia robotów. Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska
|
|
|
- Krystyna Staniszewska
- 7 lat temu
- Przeglądów:
Transkrypt

1 Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r.







2 Anatomia robota Receptory (czujniki) - fizyczne urządzenia, które mierzą wielkości fizyczne (wizyjne, ultradźwiękowe, zbliżeniowe, dotykowe) Efektory - układy wykonawcze, napędy, narzędzia Układ sterujący - sterowniki, komputer sterujący
3 Serwomechanizm Zasada działania sprzężenia zwrotnego regulacja położenia
4 Poziomy ontologiczne
5 Rodzaje autonomii robotów Energetyczna na pokładzie niezbędne jest źródło zasilania: Napęd elektryczny akumulator Napęd hydrauliczny sprężarka Napęd pneumatyczny sprężarka lub zbiornik ciśnieniowy Napęd spalinowy napędza sprężarkę lub prądnicę Decyzyjna różny stopień: Operator steruje maszyną teleoperacja Maszyna samodzielnie wykonuje zadanie robot autonomiczny Operator sporadycznie podejmuje decyzje częściowa autonomia



6 Kategorie robotów: Roboty przemysłowe środowisko strukturalne Roboty usługowe środowisko częściowo strukturalne Roboty terenowe środowisko niestrukturalne Im mniejszy stopień strukturalności środowiska tym wymagany jest wyższy stopień autonomii robota
 Porozumiewanie się z człowiekiem Porozumiewanie się z innymi robotami Reaktywności (szybkich")
7 Autonomia decyzyjna wymaga: Inteligencji Modelu robota i środowiska Wiedzy zdroworozsądkowej Zdolności do wnioskowania Zdolności komunikacyjnych (wspólny język i ontologia) Porozumiewanie się z człowiekiem Porozumiewanie się z innymi robotami Reaktywności (szybkich reakcji na bodźce)
8 Agent upostaciowiony Agent Twór postrzegający swoje środowisko oraz oddziałujący na nie, a ponadto posiadający wewnętrzny imperatyw do realizacji pewnych zadań. Robot Postrzega środowisko czujnikami, oddziałuje na nie efektorami i wykonuje zdefiniowane zadanie. Agent upostaciowiony Twór postrzegający swoje środowisko poprzez receptory (czujniki) oraz oddziałujący na nie poprzez efektory, a ponadto posiadający wewnętrzny imperatyw do realizacji pewnych zadań.

9 Struktura agenta upostaciowionego a agent C system sterowania E efektor rzeczywisty R receptor rzeczywisty j nazwa agenta x wejście y wyjście

10 Struktura agenta upostaciowionego




11 Percepcja Rozpoznawanie obiektów Analiza środowiska Mapowanie otoczenia



12 Konstrukcja autonomicznych robotów wymaga rozwiązania różnorodnych zagadnień badawczych Aktywna wizja Przykładowe sposoby osiągania autonomii: Proste agenty działające autonomicznie w ramach roju Koordynowane agenty proste Złożone agenty

13 Inteligencja roju Kolektywne zachowanie zdecentralizowanego samoorganizującego się systemu składającego się z autonomicznych agentów Wyłaniające się (emergentne) złożone zachowanie systemu wynika z prostych zachowań agentów Proste zachowania agentów są łatwe do zaprogramowania Zaprojektowanie zachowania emergentnego jest niezmiernie trudne Wynikowe zachowanie systemu wynika z interakcji pomiędzy agentami, które porozumiewają się pośrednio (np. stygmergia)
 Skalowalne (dodawanie agentów nie wymaga przeprogramowywania")
14 Zalety roju Brak centralnego planowania Zdecentralizowana struktura Proste reguły działania agentów Złożone wynikowe zachowanie sytemu Struktura odporna na awarie części agentów Pośrednia komunikacja poprzez otoczenie (komunikacja bezpośrednia źle się skaluje) Skalowalne (dodawanie agentów nie wymaga przeprogramowywania systemu)





15 Pchanie pudła Niezależnie działające agenty realizujące wspólne zadanie - komunikacja poprzez obserwację otoczenia 4 współbieżne zachowania wykorzystujące sprzężenie zwrotne do redukcji 4 uchybów do 0



16 Alternatywa dla roju Systemy z koordynatorem Umożliwiają planowania działań Systemy jednorodne (wszystkie roboty potrafią to samo) lub niejednorodne Roboty wykonują jedno lub więcej zadań naraz Zadania wymagają jednego lub więcej robotów Zadania znane na początku lub pojawiają się w trakcie pracy Funkcja użyteczności: Użyteczność = Jakość - Koszt





17 Zrobotyzowane podpory - SwarmItFIX

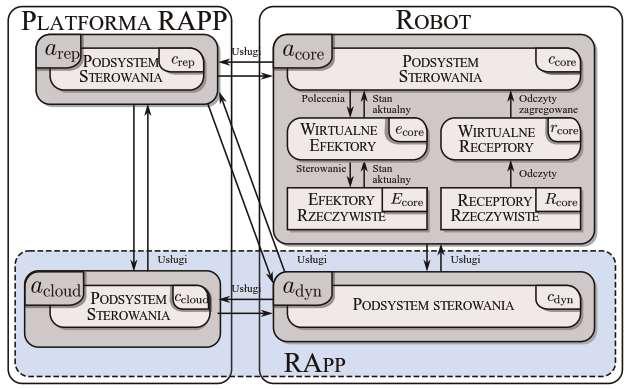

18 Ograniczone zasoby nieograniczone potrzeby Sterowniki o zmiennej strukturze - RAPP





19 Układanie kostki Rubika, jako zadanie testowe Roboty usługowe





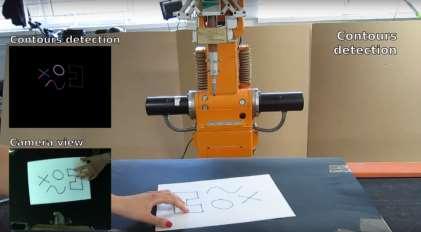
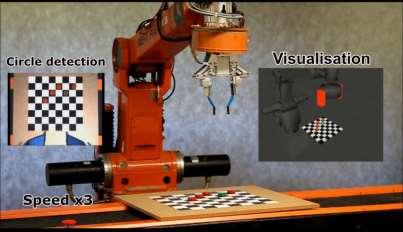
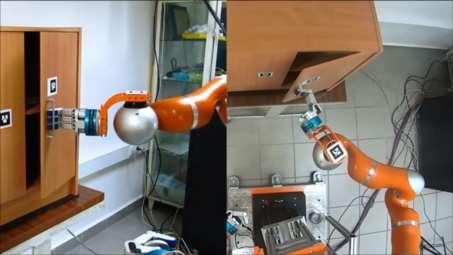
20 Inne eksperymenty prowadzące do powstania robota usługowego Robot zbierający piłki pingpongowe Robot otwierający drzwi Robot z serwomechanizmem wizyjnym Robot kasjer


21 Systemy teleoperowane też potrzebują autonomii działania Wykorzystanie dalmierza, kamery i GPS do wskazania celu ruchu Autonomiczna nawigacja wykorzystująca odometrię, GPS, kompas oraz sonary Dekompozycja systemu sterowania na agenty: a 1 - sterujący platformą mobilną a 2 sterujący głowicą z kamerą i dalmierzem a 0 koordynujący pracę systemu oraz tworzący interfejs z użytkownikiem


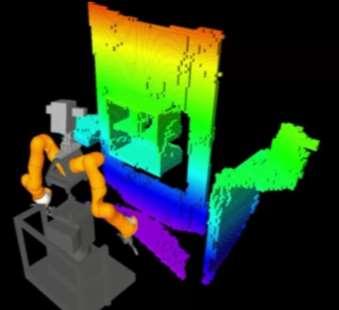
22 Roboty Ratowniczo-Eksploracyjne - RobREx Manipulacja dwuręczna Otwieranie drzwi Planowanie trajektorii ruchu Nauka chwytania

23 Dziękuję za uwagę R.U.R. Karel Čapek
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI. Robot do pokrycia powierzchni terenu
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
Systemy Informatyki Przemysłowej
 Systemy Informatyki Przemysłowej Profil absolwenta Profil absolwenta Realizowany cel dydaktyczny związany jest z: tworzeniem, wdrażaniem oraz integracją systemów informatycznych algorytmami rozpoznawania
Systemy Informatyki Przemysłowej Profil absolwenta Profil absolwenta Realizowany cel dydaktyczny związany jest z: tworzeniem, wdrażaniem oraz integracją systemów informatycznych algorytmami rozpoznawania
Systemy Agentowe główne cechy. Mariusz.Matuszek WETI PG
 Systemy Agentowe główne cechy Mariusz.Matuszek WETI PG Definicja agenta Wiele definicji, w zależności od rozpatrywanego zakresu zastosowań. Popularna definicja: Jednostka obliczeniowa (program, robot),
Systemy Agentowe główne cechy Mariusz.Matuszek WETI PG Definicja agenta Wiele definicji, w zależności od rozpatrywanego zakresu zastosowań. Popularna definicja: Jednostka obliczeniowa (program, robot),
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU
 P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy dr inż. Witold Czajewski dr inż. Marcin Iwanowski
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy dr inż. Witold Czajewski dr inż. Marcin Iwanowski
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Katedra Systemów Decyzyjnych. Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl
 Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia
 Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok
 Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE
 KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
Systemy hybrydowe reaktywno-racjonalne
 WYKŁAD 5 Systemy hybrydowe reaktywno-racjonalne Sterowanie REAKTYWNE Zalety: bardzo szybko reaguje na zmiany otoczenia, ograniczone wymagania na moc obliczeniową oraz pamięć, system reaktywny rozbudowany
WYKŁAD 5 Systemy hybrydowe reaktywno-racjonalne Sterowanie REAKTYWNE Zalety: bardzo szybko reaguje na zmiany otoczenia, ograniczone wymagania na moc obliczeniową oraz pamięć, system reaktywny rozbudowany
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Temat 1. Wprowadzenie do nawigacji robotów mobilnych. Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera
 Kurs: Algorytmy Nawigacji Robotów Mobilnych Temat 1 Wprowadzenie do nawigacji robotów mobilnych 1 Pojęcia podstawowe Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera Na początku wprowadzimy
Kurs: Algorytmy Nawigacji Robotów Mobilnych Temat 1 Wprowadzenie do nawigacji robotów mobilnych 1 Pojęcia podstawowe Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera Na początku wprowadzimy
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń
 Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA 3 2. Kod przedmiotu: Ro3 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Informatyka Stosowana
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA 3 2. Kod przedmiotu: Ro3 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Informatyka Stosowana
POLITECHNIKA POZNAŃSKA
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
Systemy Robotów Autonomicznych
 Systemy Robotów Autonomicznych Wykład nr 1 Zasady organizacji zajęć i uzyskiwania zaliczenia Kraków, 30.09.2017 dr inż. Andrzej Opaliński andrzej.opalinski @ agh.edu.pl Wszystkie informacje i aktualności
Systemy Robotów Autonomicznych Wykład nr 1 Zasady organizacji zajęć i uzyskiwania zaliczenia Kraków, 30.09.2017 dr inż. Andrzej Opaliński andrzej.opalinski @ agh.edu.pl Wszystkie informacje i aktualności
Automatyka i Regulacja Automatyczna SEIwE- sem.4
 Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka. semestralny wymiar godzin. Semestr 1. Semestr 2. Semestr 3.
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia i
semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia i
Podstawy Automatyki. Wykład 12 - Układy przekaźnikowe. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów
Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
POKL /10. Gliwice, SKN Robotyki Encoder Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska RAPORT
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
Weronika Radziszewska IBS PAN
 Komputerowe zarządzanie energią w ośrodku badawczym z rozproszonymi źródłami energii i zmiennym zapotrzebowaniem energetycznym na eksperymenty badawcze Weronika Radziszewska IBS PAN 1 Plan prezentacji
Komputerowe zarządzanie energią w ośrodku badawczym z rozproszonymi źródłami energii i zmiennym zapotrzebowaniem energetycznym na eksperymenty badawcze Weronika Radziszewska IBS PAN 1 Plan prezentacji
EFEKTY KSZTAŁCENIA DLA KIERUNKU STUDIÓW AUTOMATYKA I ROBOTYKA STUDIA PIERWSZEGO STOPNIA PROFIL PRAKTYCZNY
 EFEKTY KSZTAŁCENIA DLA KIERUNKU STUDIÓW AUTOMATYKA I ROBOTYKA STUDIA PIERWSZEGO STOPNIA PROFIL PRAKTYCZNY Umiejscowienie kierunku w obszarze kształcenia Kierunek studiów automatyka i robotyka należy do
EFEKTY KSZTAŁCENIA DLA KIERUNKU STUDIÓW AUTOMATYKA I ROBOTYKA STUDIA PIERWSZEGO STOPNIA PROFIL PRAKTYCZNY Umiejscowienie kierunku w obszarze kształcenia Kierunek studiów automatyka i robotyka należy do
POKL /10
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML
 Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML Piotr Skrzypczyński Instytut Automatyki, Robotyki i Inżynierii Informatycznej, Politechnika
Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML Piotr Skrzypczyński Instytut Automatyki, Robotyki i Inżynierii Informatycznej, Politechnika
Współczesne usługi monitoringu NOWE TRENDY
 Nowe trendy AGENDA 1. Współczesne usługi monitoringu 2. Omówienie wybranych usług dodanych Monitoring wizyjny Hosting wideo Alarm w chmurze Hosting GPS 3. Mobilne rozwiązania 4. Smart home Współczesne
Nowe trendy AGENDA 1. Współczesne usługi monitoringu 2. Omówienie wybranych usług dodanych Monitoring wizyjny Hosting wideo Alarm w chmurze Hosting GPS 3. Mobilne rozwiązania 4. Smart home Współczesne
System sterowania robota mobilnego z modułem rozpoznawania mowy
 System sterowania robota mobilnego z modułem rozpoznawania mowy inż. Andrzej Skrzypek promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 2017 inż. Andrzej
System sterowania robota mobilnego z modułem rozpoznawania mowy inż. Andrzej Skrzypek promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 2017 inż. Andrzej
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Multi-wyszukiwarki. Mediacyjne Systemy Zapytań wprowadzenie. Architektury i technologie integracji danych Systemy Mediacyjne
 Architektury i technologie integracji danych Systemy Mediacyjne Multi-wyszukiwarki Wprowadzenie do Mediacyjnych Systemów Zapytań (MQS) Architektura MQS Cechy funkcjonalne MQS Cechy implementacyjne MQS
Architektury i technologie integracji danych Systemy Mediacyjne Multi-wyszukiwarki Wprowadzenie do Mediacyjnych Systemów Zapytań (MQS) Architektura MQS Cechy funkcjonalne MQS Cechy implementacyjne MQS
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO
 ĆWICZENIE LABORATORYJNE AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO Wersja: 2013-07-27-1- 1.1. Cel ćwiczenia Celem ćwiczenia jest samodzielna
ĆWICZENIE LABORATORYJNE AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO Wersja: 2013-07-27-1- 1.1. Cel ćwiczenia Celem ćwiczenia jest samodzielna
Podstawy Automatyki. Człowiek- najlepsza inwestycja. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
 Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Systemy wbudowane. Paweł Pełczyński ppelczynski@swspiz.pl
 Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Automatyka i Robotyka. II stopień. Ogólnoakademicki. Stacjonarne/Niestacjonarne. Kierunkowy efekt kształcenia - opis WIEDZA
 Załącznik nr 7 do uchwały nr 509 Senatu Uniwersytetu Zielonogórskiego z dnia 25 kwietnia 2012 r. w sprawie określenia efektów kształcenia dla kierunków studiów pierwszego i drugiego stopnia prowadzonych
Załącznik nr 7 do uchwały nr 509 Senatu Uniwersytetu Zielonogórskiego z dnia 25 kwietnia 2012 r. w sprawie określenia efektów kształcenia dla kierunków studiów pierwszego i drugiego stopnia prowadzonych
Bezpieczeństwo pracy z robotem przemysłowym. Gliwice 2007
 ABC Control - robotyka robotyzacja automatyka roboty abb fanuc kuka Gliwice 2007 Spis treści 1. Zapewnienie bezpieczeństwa pracownikom oraz wyposażeniu...2 2.Wykonywanie regularnych przeglądów robota,
ABC Control - robotyka robotyzacja automatyka roboty abb fanuc kuka Gliwice 2007 Spis treści 1. Zapewnienie bezpieczeństwa pracownikom oraz wyposażeniu...2 2.Wykonywanie regularnych przeglądów robota,
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
Mobilny system dowodzenia, obserwacji, rozpoznania i łączności
 1.30 1.71 Projekt rozwojowy finansowany przez MNiSW pt.: Mobilny system dowodzenia, obserwacji, rozpoznania i łączności Wersja 3, 03.01.2011, Paweł Kojkoł Informacje podstawowe XI konkurs na finansowanie
1.30 1.71 Projekt rozwojowy finansowany przez MNiSW pt.: Mobilny system dowodzenia, obserwacji, rozpoznania i łączności Wersja 3, 03.01.2011, Paweł Kojkoł Informacje podstawowe XI konkurs na finansowanie
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
przedmiot specjalnościowy (podstawowy / kierunkowy / inny HES) przedmiot obowiązkowy (obowiązkowy / nieobowiązkowy) polski semestr siódmy
 przedmiot obowiązkowy (obowiązkowy / nieobowiązkowy) polski semestr siódmy") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Roboty Przemysłowe Nazwa modułu w języku angielskim Industrial Robots Obowiązuje
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Roboty Przemysłowe Nazwa modułu w języku angielskim Industrial Robots Obowiązuje
Wstęp do robotyki. Plan wykładów. Wojciech Szynkiewicz. Plan wykładu... Plan wykładu... Instytut Automatyki i Informatyki Stosowanej PW
 Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Zarządzanie energią i regulacja mocy w prosumenckiej mikroinfrastrukturze energetycznej
 Politechnika Śląska Centrum Energetyki Prosumenckiej Zarządzanie energią i regulacja mocy w prosumenckiej mikroinfrastrukturze energetycznej Marcin Fice Koszęcin, 21 października 215 2 KSE WEK EG3 EG2
Politechnika Śląska Centrum Energetyki Prosumenckiej Zarządzanie energią i regulacja mocy w prosumenckiej mikroinfrastrukturze energetycznej Marcin Fice Koszęcin, 21 października 215 2 KSE WEK EG3 EG2
TECHNIK MECHATRONIK. Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne
 TECHNIK MECHATRONIK Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne Mechatronika to nauka istniejąca na styku kilku innych dziedzin wiedzy: mechaniki, elektroniki, informatyki, elektrotechniki,
TECHNIK MECHATRONIK Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne Mechatronika to nauka istniejąca na styku kilku innych dziedzin wiedzy: mechaniki, elektroniki, informatyki, elektrotechniki,
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV
 Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
Zastosowanie metod sztucznej inteligencji do potrzeb pomiarów i kształtowania gospodarki energetycznej w budynkach
 Łukasz Izbaner izbaner@anteeo.com.pl Zastosowanie metod sztucznej inteligencji do potrzeb pomiarów i kształtowania gospodarki energetycznej w budynkach Internet of Things w ujęciu praktycznym Kim jesteśmy?
Łukasz Izbaner izbaner@anteeo.com.pl Zastosowanie metod sztucznej inteligencji do potrzeb pomiarów i kształtowania gospodarki energetycznej w budynkach Internet of Things w ujęciu praktycznym Kim jesteśmy?
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: Projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PROJEKT INŻYNIERSKI Engineer s project
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: Projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PROJEKT INŻYNIERSKI Engineer s project
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Dr hab. inż. Marek Pawełczyk, prof. nzw. w Politechnice Śląskiej Koordynator Projektu POKL.04.01.02-00-020/10
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
WSPÓŁPRACA NAUKA PRZEMYSŁ
 Rzeszów, 2007.07.19 POLITECHNIKA RZESZOWSKA WSPÓŁPRACA NAUKA PRZEMYSŁ Projekty realizowane w ramach CZT AERONET oraz Sieci Naukowej Aeronautica Integra Prof. dr hab. inż. Marek ORKISZ DEMONSTRATOR ZAAWANSOWANYCH
Rzeszów, 2007.07.19 POLITECHNIKA RZESZOWSKA WSPÓŁPRACA NAUKA PRZEMYSŁ Projekty realizowane w ramach CZT AERONET oraz Sieci Naukowej Aeronautica Integra Prof. dr hab. inż. Marek ORKISZ DEMONSTRATOR ZAAWANSOWANYCH
RAMOWY PROGRAM PRAKTYKI ZAWODOWEJ PRAKTYKA II (inżynierska)
") RAMOWY PROGRAM PRAKTYKI ZAWODOWEJ PRAKTYKA II (inżynierska) Kierunek: mechanika i budowa maszyn Wymiar praktyki: 4 tygodni po II roku studiów, tj. 125 godz. Ogólne wytyczne programowe: 0,5 tygodnia Przygotowanie
RAMOWY PROGRAM PRAKTYKI ZAWODOWEJ PRAKTYKA II (inżynierska) Kierunek: mechanika i budowa maszyn Wymiar praktyki: 4 tygodni po II roku studiów, tj. 125 godz. Ogólne wytyczne programowe: 0,5 tygodnia Przygotowanie
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Robot Mobilny Mobot-Explorer
 Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
przedmiot specjalnościowy przedmiot obowiązkowy polski szósty
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3.
 Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3.") PLC 1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3. 1.Ladder Diagram (LD) język graficzny schematów drabinkowych 2. Function Block Diagram (FBD) jezyk bloków
PLC 1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3. 1.Ladder Diagram (LD) język graficzny schematów drabinkowych 2. Function Block Diagram (FBD) jezyk bloków
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA , M.
 Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA 19.02.2015, M.Wolski #1 Wprowadzenie Agenda prezentacji: O PIAP Strategiczne
Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA 19.02.2015, M.Wolski #1 Wprowadzenie Agenda prezentacji: O PIAP Strategiczne
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej
 Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników drugiej ankiety Delphi w obszarze ROBOTYKA mgr Jan Piwiński Specjalista w projekcie
Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników drugiej ankiety Delphi w obszarze ROBOTYKA mgr Jan Piwiński Specjalista w projekcie
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego inżynierskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Sprzętowe i programowe składniki sieci komputerowych. 2. Routing w sieciach komputerowych. 3. Siedmiowarstwowy model
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Sprzętowe i programowe składniki sieci komputerowych. 2. Routing w sieciach komputerowych. 3. Siedmiowarstwowy model
Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa. Instrukcja do zajęć laboratoryjnych
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie własności statycznych siłowników pneumatycznych Ćwiczenie
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie własności statycznych siłowników pneumatycznych Ćwiczenie
ROBOTYKA I SYSTEMY DECYZYJNE
 POLITECHIK GDŃSK SPECJLOŚĆ ROBOTYK I SYSTEMY DECYZYJE prof. dr hab. inż. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych i Robotyki Wydział Elektroniki Telekomunikacji i Informatyki Oczekiwania względem
POLITECHIK GDŃSK SPECJLOŚĆ ROBOTYK I SYSTEMY DECYZYJE prof. dr hab. inż. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych i Robotyki Wydział Elektroniki Telekomunikacji i Informatyki Oczekiwania względem
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA
 IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA 1 CEL IDENTYFIKACJI ZATOPIONYCH JEDNOSTEK - Zagrożenie
IDENTYFIKACJA ZATOPIONYCH JEDNOSTEK NA DNIE ZBIORNIKÓW WODNYCH KRZYSZTOF KEMPSKI AUTOMATYKA I ROBOTYKA WYDZIAŁ MECHANICZNY POLITECHNIKA WROCŁAWSKA 1 CEL IDENTYFIKACJI ZATOPIONYCH JEDNOSTEK - Zagrożenie
Powody tworzenia systemów wielorobotowych:
 Wstęp do Robotyki c W. Szynkiewicz, 2009 1 Systemy wielorobotowe/wieloagentowe Robot to agent upostaciowiony(mający fizyczne ciało) działający w rzeczywistym, fizycznym środowisku. O systemie wielorobotowym
Wstęp do Robotyki c W. Szynkiewicz, 2009 1 Systemy wielorobotowe/wieloagentowe Robot to agent upostaciowiony(mający fizyczne ciało) działający w rzeczywistym, fizycznym środowisku. O systemie wielorobotowym
Profil: Systemy Decyzyjne i Robotyka
 katedra systemów decyzyjnych i robotyki Profil: Systemy Decyzyjne i Robotyka prof. dr hab. inż. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych i Robotyki Wydział Elektroniki Telekomunikacji i Informatyki
katedra systemów decyzyjnych i robotyki Profil: Systemy Decyzyjne i Robotyka prof. dr hab. inż. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych i Robotyki Wydział Elektroniki Telekomunikacji i Informatyki
Jazda autonomiczna Delphi zgodna z zasadami sztucznej inteligencji
 Jazda autonomiczna Delphi zgodna z zasadami sztucznej inteligencji data aktualizacji: 2017.10.11 Delphi Kraków Rozwój jazdy autonomicznej zmienia krajobraz technologii transportu w sposób tak dynamiczny,
Jazda autonomiczna Delphi zgodna z zasadami sztucznej inteligencji data aktualizacji: 2017.10.11 Delphi Kraków Rozwój jazdy autonomicznej zmienia krajobraz technologii transportu w sposób tak dynamiczny,
Efekty kształcenia na kierunku AiR drugiego stopnia - Wiedza Wydziału Elektrotechniki, Automatyki i Informatyki Politechniki Opolskiej
 Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Katedra Systemów Automatyki
 Katedra Systemów Automatyki kierunek: Automatyka i robotyka specjalność: Komputerowe systemy sterowania PRACOWNICY Kierownik: prof. dr hab. inż. Maciej Niedźwiecki, prof. nadzw. PG Nauczyciele akademiccy:
Katedra Systemów Automatyki kierunek: Automatyka i robotyka specjalność: Komputerowe systemy sterowania PRACOWNICY Kierownik: prof. dr hab. inż. Maciej Niedźwiecki, prof. nadzw. PG Nauczyciele akademiccy:
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
Rozszerzony konspekt preskryptu do przedmiotu Autonomiczne Roboty Mobilne
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Autonomiczne Roboty Mobilne dr inż. Andrzej Chmielniak Instytut
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Autonomiczne Roboty Mobilne dr inż. Andrzej Chmielniak Instytut
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Rodzaj studiów: stacjonarne Specjalność: Mechatronika stosowana Katedra: Mechaniki i Mechatroniki Opracowanie koncepcji systemu sterowania (nawigacji i komunikacji) dwu-zadaniowego nawodno-podwodnego bezzałogowego
Rodzaj studiów: stacjonarne Specjalność: Mechatronika stosowana Katedra: Mechaniki i Mechatroniki Opracowanie koncepcji systemu sterowania (nawigacji i komunikacji) dwu-zadaniowego nawodno-podwodnego bezzałogowego
Uchwała obowiązuje od dnia podjęcia przez Senat. Traci moc Uchwała nr 144/06/2013 Senatu Uniwersytetu Rzeszowskiego z 27 czerwca 2013 r.
 Rektor Uniwersytetu Rzeszowskiego al. Rejtana 16c; 35-959 Rzeszów tel.: + 48 17 872 10 00 (centrala) + 48 17 872 10 10 fax: + 48 17 872 12 65 e-mail: rektorur@ur.edu.pl Uchwała nr 282/03/2014 Senatu Uniwersytetu
Rektor Uniwersytetu Rzeszowskiego al. Rejtana 16c; 35-959 Rzeszów tel.: + 48 17 872 10 00 (centrala) + 48 17 872 10 10 fax: + 48 17 872 12 65 e-mail: rektorur@ur.edu.pl Uchwała nr 282/03/2014 Senatu Uniwersytetu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Automatyka i metrologia
 Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Układy sterowania robotów przemysłowych. Warstwa programowania trajektorii ruchu. Warstwa wyznaczania trajektorii ruchu.
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA RiSM Układy sterowania robotów przemysłowych. Warstwa programowania trajektorii ruchu. Warstwa wyznaczania trajektorii ruchu. Dr inż. Mariusz Dąbkowski Zadaniem
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA RiSM Układy sterowania robotów przemysłowych. Warstwa programowania trajektorii ruchu. Warstwa wyznaczania trajektorii ruchu. Dr inż. Mariusz Dąbkowski Zadaniem
DigiPoint Karta katalogowa DS 5.00
 1/5 f ggggg sterownik programowalny z wyświetlaczem LCD 2/5 OGÓLNA CHARAKTERYSTYKA Sterowniki są zaawansowanymi technologicznie swobodnie programowalnymi kontrolerami przeznaczonymi do sterowani oświetleniem,
1/5 f ggggg sterownik programowalny z wyświetlaczem LCD 2/5 OGÓLNA CHARAKTERYSTYKA Sterowniki są zaawansowanymi technologicznie swobodnie programowalnymi kontrolerami przeznaczonymi do sterowani oświetleniem,
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
PR242012 23 kwietnia 2012 Mechanika Strona 1 z 5. XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów
 Rozszerzony System Transportowy: nowatorska technologia napędów") Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0. Temat: GrabBot Budujemy robota, który przenosi przedmioty.
 Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0 Temat: GrabBot Budujemy robota, który przenosi przedmioty. Działanie robota GrabBot to robot mobilny o napędzie gąsienicowym, co daje
Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0 Temat: GrabBot Budujemy robota, który przenosi przedmioty. Działanie robota GrabBot to robot mobilny o napędzie gąsienicowym, co daje
Praktyka zawodowa. Automatyka i Robotyka I stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Practice Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Practice Obowiązuje od roku akademickiego 2013/2014
AiR_ATW_7/1 Automatyzacja technik wytwarzania Manufacturing Systems Automation
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014