Roboty przemysłowe, usługowe, specjalne - zastosowania, przykłady
|
|
|
- Zofia Sobolewska
- 8 lat temu
- Przeglądów:
Transkrypt
1 Roboty przemysłowe, usługowe, specjalne - zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl
2 Elastyczne systemy wytwarzania Elastyczna automatyzacja FMS Flexible Manufacturing System FAS Flexible Assembly System
3 Geneza systemów klasy FMS i FAS Zmiana priorytetów : koszt, jakość szybkość wdrożenia i dostarczenia na rynek. Technologia wytwarzania. Filozofia. Traktowanie produkcji jako system, którym można sterować
4 Elastyczne systemy produkcyjne FMS FMS Flexible Manufacturing System Zintegrowane i sterowane komputerowo kompleksy automatycznych urządzeń transportowych i manipulacyjnych obrabiarek sterowanych numerycznie lub komputerowo, zdolne realizować produkcję szerokiego asortymentu detali przy często zmieniających się wielkościach serii. Systemy te cechuje łatwość przystosowania się do zmian asortymentu, wysoka jakość i wydajność procesu wytwarzania, niskie koszty magazynowania oraz terminowość realizacji zamówienia.

5 Elastyczne systemy montażowe FAS Flexible Assembly System Zautomatyzowana jednostka montażowa mająca możliwość częstego i szybkiego dostosowywania się do zmian zapotrzebowania Składa się z maszyn sterowanych numerycznie i/lub centrów montażu, automatycznych systemów transportu i magazynowania oraz wymiany narzędzi
6 Jak rozumieć elastyczność systemu produkcyjnego? Elastyczność maszyn Elastyczność asortymentu produkcji Elastyczność wielkości montażu Elastyczność procesu wytwórczego Elastyczność montażu Elastyczność personelu
7 Elastyczność produkcji - własności zdolność produkowania zróżnicowanych części bez konieczności generalnego przezbrajania maszyn pozwala określić jak szybko przedsiębiorstwo może przezbroić linie w celu produkcji nowego wyrobu zdolność do zmiany marszruty w celu modyfikacji produkowanych części zdolność do efektywnej produkcji wyrobu odpowiadającego zapotrzebowaniu klientów, szeroka gama oferowanych produktów możliwość szybkiej zmiany poziomu produkcji i wielkości serii

8 Elastyczne systemy produkcyjne Wózek AGV Obrabiarka CNC Magazyn centralny Układnica regałowa Frezarka CNC Robot przemysłowy

9 Elastyczne linie produkcyjne
10 Elastyczne systemy produkcyjne - elementy Maszyny i urządzenia produkcyjne Urządzenia transportowe Magazyny Systemy sterujące





11 Elastyczne systemy produkcyjne - elementy Maszyny i urządzenia produkcyjne obrabiarki sterowane numerycznie z automatycznymi wymianami narzędzi maszyny pomiarowe, roboty z głowicami narzędziowymi, roboty montażowe Urządzenia transportowe roboty przemysłowe wózki samojezdne (AGV Automated Guided Vehicle) transportery, przenośniki karuzelowe, zmieniacze palet suwnice, układnice regałowe

 międzyoperacyjne przy")
12 Elastyczne systemy produkcyjne - elementy Magazyny magazyny centralne (AS/RS Automated Storage/Retrieval System) magazyny lokalne magazyny (bufory) międzyoperacyjne przy obrabiarkach, maszynach
13 Elastyczne systemy produkcyjne - elementy Systemy sterowania sieci nadzorujących komputerów i mikroprocesorów dla: kierowania przepływem części i materiałów przez system śledzenia wykonywanych operacji przekazywanie instrukcji do wykonywania operacji do maszyn zabezpieczenie narzędzi nadzorowanie wykonywanych operacji, monitorowanie zdarzeń sygnalizowanie stanów wymagających interwencji


14 Elementy składowe FMS Flexible Manufacturing Module (FMM) np. obrabiarka CNC, bufor cześci, zmieniacz palet
. np.")

15 Elementy składowe FMS Flexible Manufacturing (Assembly) Cell (F(M/A)C). np. 4 FMM i 1 AGV Flexible Manufacturing Group (FMG). np. 2 FMC, 1 FMM i 2 AGV Flexible Production Systems (FPS). np. 1 FMG, 1 FAC, 2 AGV, automatyczny magazyn narzędzi i cześci Flexible Manufacturing Line (FML). np. kilka stacji ustawionych w linii, z wózkami AGV


16 Wózki AGV Automatic Guided Vehicles Poczatki siegaja lat 50-tych Wyposażone w silniki elektryczne, Poczatkowo ich jedyna funkcja był transport, Teraz dodaje się manipulatory do (za/roz)ładunku towaru Bezzałogowe pojazdy transportowe, Ładowność od kilku kg do 100 ton, Przewożą także ludzi.


17 Rodzaje wózków AGV Wózki holownicze (Towing Vehicle) - pierwsze z wózków AGV, mogą holować wiele przyczep, maksymalna ładowność oferowanych modeli sięga od 3 do 27 ton. Wózki pojedyńczego załadunku (Unit Load Vehicles) - ładowność od ok. 1 do 27 ton, występują w różnych wersjach, z różnymi platformami załadunkowymi w zależności od konkretnych zastosowań.


18 Rodzaje wózków AGV Wózki widłowe (Fork Vehicles) - ładowność od ok 0.5 do ponad 2 ton Cart Vehicles - wózki o ładowności do 2 ton, mogące pracować jako wozki pojedyńczego załadunku lub wozki holownicze.



19 Nawigacja Początkowo wykorzystywano przewody montowane w podłożu W latach 80-tych wprowadzono nawigację laserową. AGV z nawigacją laserową AGV z nawigacją magnetyczno-żyroskopową
20 Metody nawigacji wózków AGV: metoda pętli indukcyjnej, metoda pętli magnetycznej (metalicznej), metoda nawigacji laserowej, metoda linii refleksyjnej, metoda układu współrzędnych, metoda żyroskopowa, metoda ultradźwiękowa, metoda GPS

21 Zasada działania i nawigacji Metoda pętli indukcyjnej W podłodze umieszczony jest przewód, który pod wpływem przepływu prądu o określonej częstotliwości generuje pole magnetyczne. Natężenie pola wykrywane jest przez antenę umieszczoną w dolnej częsci wózka. Zalety: duża skuteczność możliwość stosowania w otwartej i zamkniętej przestrzeni Wady: problemy ze zmianą trasy wozkow

22 Zasada działania i nawigacji Metoda pętli magnetycznej (metalicznej) Do podłogi przyklejana jest taśma ferromagnetyczna, generująca pole magnetyczne wykrywane przez antenę wózka. Zalety: prosta i tania instalacja i dezinstalacja możliwość szybkiej zmiany trasy wózka Wady: mała wytrzymałość na uszkodzenia mechaniczne podatność na zakłócenia (sąsiedztwo innych ferromagnetykow)

23 Zasada działania i nawigacji Metoda nawigacji laserowej Skaner laserowy umieszczony w górnej części wózka omiata pomieszczenie, w którym pracuje wózek z częstotliwością od kilku do kilkunastu razy na sekundę. Na ścianach i kolumnach umieszczone są specjalne odbłyśniki. Pomiar kąta odbicia i odległości umożliwia pozycjonowanie i orientowanie wózka Zalety: możliwość pracy na zewnątrz i wewnątrz budynków duża dokładność (1-2mm) łatwo modyfikowalna Wady: odbłyśniki muszą być widoczne dla robota
24 Zasada działania i nawigacji Metoda linii refleksyjnej Na podłodze malowana jest linia farbą refleksyjną. Tak wyznaczona trasa śledzona jest kamęrą cyfrową Zastosowane materiały refleksyjne mają ściśle określone własności odbijania światła istotnie różne od refleksyjności elementów otoczenia. Zalety: łatwo modyfikowalna trasa Wady: mała niezawodność duża czułość na zabrudzenia nie nadaje się do zastosowań na zewnątrz budynkow

25 Zasada działania i nawigacji Metoda układu współrzędnych Na podstawie zamontownych w podłodze punktów nadajnikowych układ sterowania wózka AGV kordynuje jego położenie w przestrzeni. Zalety: stosunkowo prosta w modyfikacji Wady: wymaga zastosowania rozbudowanego układu punktów w podłożu
26 Zasada działania i nawigacji Metoda żyroskopowa Metoda wykorzystuje żyroskop do detekcji zmian w kierunku jazdy wózka. W podłodze instalowane są magnesy wykrywane przez odpowiednie czujniki. Magnesy dają pewność, że robot znajduje się we właściwym miejscu Zalety: bardzo dobre pozycjonowanie (przy osprzęcie odpowiedniej jakości) Wady: rozwiązanie kosztowne
27 Zasada działania i nawigacji Metoda ultradźwiękowa Nawigacja odbywa się w odniesieniu do powierzchni pionowych. Sonary zbierają dane i oceniają odległość do przeszkod w określonym kierunku Zalety: nie ma konieczności stosowania dodatkowych znaczników Wady: zastosowanie w niewielkich przestrzeniach (np. korytarze międzyregałowe)

28 Zasada działania i nawigacji Nawigacja GPS Metoda wykorzystująca Globalny System Pozycjonowania. W celu wyeliminowania błędów stosuje się pomiar różnicowy z wykorzystaniem stacji referencyjnej Zalety: stosunkowo prosta do wdrożenia Wady: konieczność umieszczenia stacji referencyjnej dokładność od 0,5-2m możliwość stosowania tylko na zewnątrz



29 Przykładowe rozwiązania Port w Hamburgu Port w Rotterdamie Port w Rotterdamie


30 Konecranes Gottwald automated guided vehicles (AGVs)



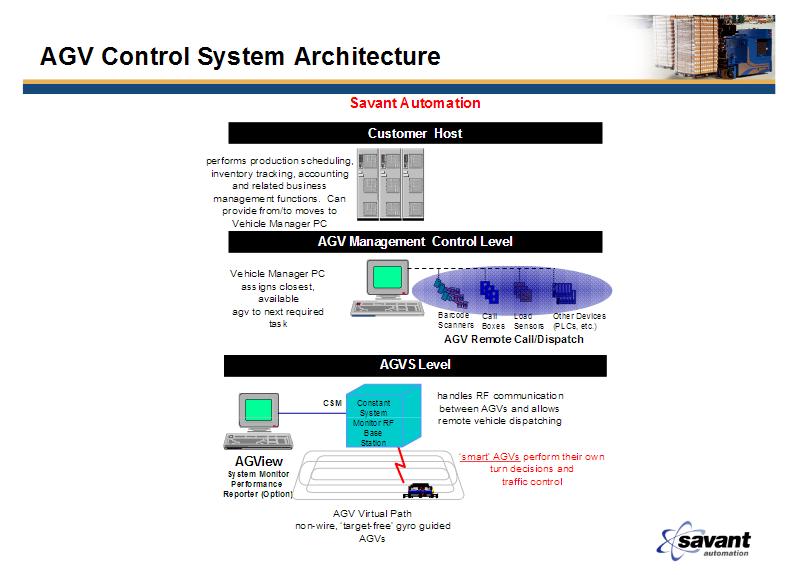
31 Roboty transportowe - Savant Automation


32 Roboty transportowe - Savant Automation
33

34 Elettric 80 - LGV

35 Elettric 80 - LGV

36 Elettric 80 - zrobotyzowane owijarki

37 Elettric 80 - zrobotyzowane owijarki

38 Elettric 80 - paletyzacja



39 Elettric 80 - paletyzacja

40 Elettric 80 - system kontroli palet
41 Roboty saperskie Statystyka Mina lądowa zabija człowieka średnio co 20 minut Rocznie ginie z powodu min około ludzi (w tym 8000 dzieci) Każdego roku zostaje usuniętych około 100 tysięcy min Ilość min na świecie szacuje się na około milionów (!) Kraj / Region Angola Afganistan Egipt Kambodża Kuwejt Ameryka Łacińska Mozambik Somalia Republiki byłej Jugosławii (bez Kosova) Liczba min lądowych i niewybuchów milionów 9-10 milionów 22 miliony 8-10 milionów 5-10 milionów 0,3-1 milion 2 miliony 1 milion 6 milionów



42 Przykładowe konstrukcje
43 Wyposażenie robotów saperskich Typowe rozwiązania zawierają takie wyposażenie jak: aparatura telewizyjna, kamery telewizyjne, oraz przenośny monitor reflektory oświetlające teren manipulatory umożliwiające przemieszczanie niewybuchów przenośna aparatura rentgenowska do zbadania na miejscu wykrytego obiektu i określenia stopnia zagrożenia urządzenia do niszczenia na miejscu środków bojowych (np. palniki, karabiny ze specjalnymi pociskami) komplet narzędzi do demontażu niewybuchów i min oraz niszczenia ich zapalników zestawy mikrofonowo - stetoskopowe do identyfikacji zapalników

44 Robot saperski Inspector
45 Robot saperski Inspector Zachowanie stałej orientacji w przestrzeni poszczególnych części manipulatora podczas ruchu pozostałych ułatwia precyzyjne operowanie niebezpiecznymi ładunkami System kontroli robota umożliwia jednoczesne sterowanie wszystkimi jego napędami Program automatycznego składania manipulatora do pozycji transportowej przyspiesza i ułatwia przygotowanie robota do transportu Robot może holować lub przepychać pojazdy samochodowe o masie do 1500 kg pozostawione na dowolnym biegu Gąsienica przednia (o zmiennym, zdalnie sterowanym nachyleniu) zwiększa możliwości trakcyjne, stabilizację wzdłużną oraz umożliwia płynne poruszanie się po schodach i znacznych nierównościach terenu Manipulator robota posiada duży udźwig, który wynosi na wyciągniętych ramionach 30 kg, a na złożonych 60 kg Obrót podstawy manipulatora wynosi aż 400
46 Robot saperski Inspector

47 Roboty PIAP

48 Akcesoria dla robotów PIAP

49 Big dog Posiada system aktywnego balansowania Prędkość biegu ponad 6 km/h Udźwig 150 kg Kąt zbocza pod jakie może wejść do 35º Zobacz film (plik BigDog.wvm)



50 Roboty usługowe w domu


51 RoboMower

52 Roboty asystujące - Assistive Robotic Manipulator

53 Roboty asystujące - Assistive Robotic Manipulator


54 Egzoszkielety i protezy bioniczne
55 Roboty społeczne - projekt Lirec ROBOT SPOŁECZNY - Robot społeczny jest to robot autonomiczny zdolny do komunikacji i podejmowania interakcji z człowiekiem zgodnie z oczekiwanymi przez niego normami zachowań. Robot społeczny powinien być zdolny do: wyrażania, postrzegania emocji komunikowania sie w oparciu o pewne modele dialogowe używania naturalnych dla człowieka sygnałów (gesty, spojrzenia itp) wykazywania więzi pomiędzy człowiekiem a robotem uczenia sie

56 Robot społeczny Emys

57 Robot społeczny EMYS

58 EMYS Team

59 Robot Nao

60 Nao Wymiary robota to: 573 x 311 x 275 mm. Waży 5,2 kg. NAO ma wbudowane 2 głośniki i 4 mikrofony. Na głowie ma zamonotwane 2 kamery wideo o max. rozdzielczości nagrywania 1280x960 px w tempie 30 kl/s. Jest w stanie rozpoznawać przedmioty i twarze. Oprogramowanie Choregraphe pozwala NAO czytać na głos tekst napisany w jednym z 19 języków. Robot posiada także zestaw dwóch czujników IR w oczach i dwa dalmierze ultradźwiękowe umieszczone na klace piersiowej. W utrzymaniu równowagi pomagają mu 2 żyroskopy, akcelerometr i 8 czujników nacisku umieszczonych w stopach. Pozycja każdej części ciała jest dokładnie śledzona dzięki 36 czujnikom hallotronowym w przegubach, dzięki czemu nigdy nie dojdzie do niechcianej kolizji między ruchliwymi kończynami NAO, zapewniającymi mu 25 stopni swobody. Za ruch ciała odpowiada 26 serwomotorów (szczotkowych, bezrdzeniowych). Ma wbudowaną bezprzewodową kartę sieciową umożliwiającą mu łączenie się z internetem. Oczy robota mogą przybierać różne kolory, reprezentując jego nastrój. Robot kontrolowany jest za pomocą systemu Linux. Procesor Intel Atom Z530, 1 GB RAM oraz 2 GB pamięci Flash z możliwością powiększenia jej o dodatkowe 8 GB dzięki czytnikowi kart MicroSD. Posiada port Ethernet i odbiornik WiF

61 Roboty humanoidalne Robot Asimo (Honda) W roku 2003 towarzyszył premierowi Japonii podczas jego oficjalnej wizyty w Czechach, jako ambasador dobrej woli wszystkich robotów. Złożył także wtedy kwiaty pod pomnikiem pisarza Karela Čapka, który jako pierwszy użył słowa robot w roku 1920.


62 Roboty humanoidalne Robonaut 2

63 Robonaut 2 W przyszłości R2 będzie mógł pod nadzorem człowieka wykonywać prace zarówno wewnątrz jak i na zewnątrz stacji. Urządzenie umożliwiające mu samodzielne poruszanie, jest w trakcie fazy projektowej. Nie ma planów powrotu robota na Ziemię.
64 Robonaut 2 Robonaut 2 (R2) wyruszył 24 lutego 2011 wraz z misją STS-133 na Międzynarodową Stację Kosmiczną. jest to pierwszy humanoidalny robot w kosmosie. Robot składa się z "głowy", w której umieszczone są kamery, dwóch ramion zakończonych chwytakami i tułowia, w którym znajduje się jego komputer sterujący. Posiada ponad 350 sensorów, 42 stopnie swobody, waży 150 kilogramów.


65 Roboty inspirowane bionicznie SmartBird Festo SmartBird ma rozpiętość skrzydeł wynoszącą 196 cm i waży niespełna 450 g.
66 Roboty chirurgiczne


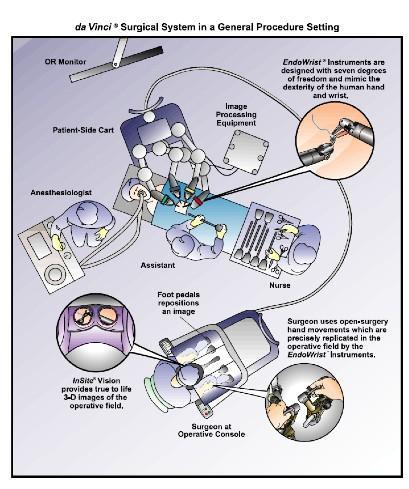
67 Robot da Vinci

68 Robot da Vinci

69 Astronaut A3 Robotic Milking System

70 Astronaut A3 Robotic Milking System


71 Astronaut A4 Robotic Milking System


72 Kiva System
73 Kiva System Szybkie podejmowanie (podawanie) Sprawna instalacja Realizacja zamówień w czasie rzeczywistym Wysoka precyzja w rozpoznawaniu przedmiotów (bar code lub system wizyjny) Duża gęstość w magazynach (oszczędność miejsca) Modułowa rozszerzalność (dodawanie magazynowych podów czy też jeżdżących jednostek w miare potrzeby) Większa produktywności pracownika
74 Elementy Kiva System 1.Split-Case picking 2.Case picking 3.Shipping sortation 4.Mixed Palet building 5.Split-Case replenishment


75 Kiva Mobile Fulfillment System (Kiva MFS) ItemFetch Split-Case Picking System

 OrderFetch")

76 Kiva Mobile Fulfillment System (Kiva MFS) OrderFetch Shipping Sorter CaseFetch Case Picking System

77 Zasada działania systemu MFS stacja pobierania stacja uzupełniania kaset stacja wysyłania stacja przyjęć



78 Kiva Mobile Fulfillment System (Kiva MFS)


79 Kiva Mobile Fulfillment System (Kiva MFS)
Roboty przemysłowe, usługowe, specjalne - zastosowania, przykłady
 Roboty przemysłowe, usługowe, specjalne - zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Elastyczne systemy wytwarzania Elastyczna
Roboty przemysłowe, usługowe, specjalne - zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Elastyczne systemy wytwarzania Elastyczna
Roboty przemysłowe, usługowe, specjalne - zastosowania, przykłady
 Roboty przemysłowe, usługowe, specjalne - zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Elastyczne systemy wytwarzania Elastyczna
Roboty przemysłowe, usługowe, specjalne - zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Elastyczne systemy wytwarzania Elastyczna
Uwarunkowania procesów logistycznych w przedsiębiorstwie o innowacyjnych technologiach. prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.
 Uwarunkowania procesów logistycznych w przedsiębiorstwie o innowacyjnych technologiach prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.pl 2015 1 Zagadnienia: 1. Innowacyjne technologie w nowoczesnych
Uwarunkowania procesów logistycznych w przedsiębiorstwie o innowacyjnych technologiach prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.pl 2015 1 Zagadnienia: 1. Innowacyjne technologie w nowoczesnych
Systemy robotów autonomicznych
 Systemy robotów autonomicznych Wykład nr 11 Systemy kontroli i zarządzania transportem Automated Guided Vehicles Akademia Górniczo-Hutnicza 12.06.2013, Kraków mgr inż. Andrzej Opaliński opal@tempus.metal.agh.edu.pl
Systemy robotów autonomicznych Wykład nr 11 Systemy kontroli i zarządzania transportem Automated Guided Vehicles Akademia Górniczo-Hutnicza 12.06.2013, Kraków mgr inż. Andrzej Opaliński opal@tempus.metal.agh.edu.pl
Uwarunkowania procesów logistycznych w przedsiębiorstwie o innowacyjnych technologiach
 Uwarunkowania procesów logistycznych w przedsiębiorstwie o innowacyjnych technologiach prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.pl 2016/2017 1 Zagadnienia: 1. Innowacyjne technologie w nowoczesnych
Uwarunkowania procesów logistycznych w przedsiębiorstwie o innowacyjnych technologiach prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.pl 2016/2017 1 Zagadnienia: 1. Innowacyjne technologie w nowoczesnych
Automatyzacja wytwarzania
 Automatyzacja wytwarzania ESP, CAD, CAM, CIM,... 1/1 Plan wykładu Automatyzacja wytwarzania: NC/CNC Automatyzacja procesów pomocniczych: FMS Automatyzacja technicznego przygotowania produkcji: CAD/CAP
Automatyzacja wytwarzania ESP, CAD, CAM, CIM,... 1/1 Plan wykładu Automatyzacja wytwarzania: NC/CNC Automatyzacja procesów pomocniczych: FMS Automatyzacja technicznego przygotowania produkcji: CAD/CAP
Innowacyjne rozwiązania!
 R O Z W I Ą Z A N I A B R A N Ż O W E P r z e m y s ł s p o ż y w c z y i o p a k o w a ń Innowacyjne rozwiązania! Firma SCHUNK GmbH & Co. KG to lider w dziedzinie automatyki przemysłowej i systemów mocowań.
R O Z W I Ą Z A N I A B R A N Ż O W E P r z e m y s ł s p o ż y w c z y i o p a k o w a ń Innowacyjne rozwiązania! Firma SCHUNK GmbH & Co. KG to lider w dziedzinie automatyki przemysłowej i systemów mocowań.
O samojezdnych wózkach transportowych nowej generacji
 SEW-Eurodrive Polska O samojezdnych wózkach transportowych nowej generacji Zasady fizyki obowiązujące w technice transportowej, często stanowią naturalną barierę dla wielu wizjonerskich pomysłów, co do
SEW-Eurodrive Polska O samojezdnych wózkach transportowych nowej generacji Zasady fizyki obowiązujące w technice transportowej, często stanowią naturalną barierę dla wielu wizjonerskich pomysłów, co do
Kompletacja (picking) prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.pl Łódź 2014/2015
 prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.pl Łódź 2014/2015") Kompletacja (picking) prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.pl Łódź 2014/2015 Kompletacja def. Operacja w procesie magazynowym polegająca na pobraniu zapasów ze stosów lub urządzeń do składowania
Kompletacja (picking) prof. PŁ dr hab. inż. Andrzej Szymonik www.gen-prof.pl Łódź 2014/2015 Kompletacja def. Operacja w procesie magazynowym polegająca na pobraniu zapasów ze stosów lub urządzeń do składowania
PRACA MAGISTERSKA AUTOMATYCZNE MIKROPOJAZDY W NADZORZE TRANSPORTU LĄDOWEGO
 PRACA MAGISTERSKA AUTOMATYCZNE MIKROPOJAZDY W NADZORZE TRANSPORTU LĄDOWEGO Wojciech Stępie pień Wydział Transportu Politechnika Warszawska Zadanie na prace dyplomową i zakres pracy: Informacje ogólne na
PRACA MAGISTERSKA AUTOMATYCZNE MIKROPOJAZDY W NADZORZE TRANSPORTU LĄDOWEGO Wojciech Stępie pień Wydział Transportu Politechnika Warszawska Zadanie na prace dyplomową i zakres pracy: Informacje ogólne na
Instrukcja z przedmiotu Napęd robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
Specyfikacja techniczna obrabiarki. wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40
 Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Trilogiq Poland Sp. z o.o. tel. (0) 22 243 21 67 kom: (0) 600 261 005 Faks: (0) 22 398 88 45 e-mail: info@trilogiq.pl www.trilogiq.
 22 243 21 67 kom: (0) 600 261 005 Faks: (0) 22 398 88 45 e-mail: info@trilogiq.pl www.trilogiq.") Trilogiq Poland Sp. z o.o. tel. (0) 22 243 21 67 kom: (0) 600 261 005 Faks: (0) 22 398 88 45 e-mail: info@trilogiq.pl www.trilogiq.pl www.trilogiq.com Podstawy Co to jest MOVE? MOVE jest AGV (Automatic
Trilogiq Poland Sp. z o.o. tel. (0) 22 243 21 67 kom: (0) 600 261 005 Faks: (0) 22 398 88 45 e-mail: info@trilogiq.pl www.trilogiq.pl www.trilogiq.com Podstawy Co to jest MOVE? MOVE jest AGV (Automatic
Nowe stanowiska techniczno-dydaktyczne dla potrzeb edukacji mechatronicznej
 Witold Morawski FESTO DIDACTIC Nowe stanowiska techniczno-dydaktyczne dla potrzeb edukacji mechatronicznej Firma Festo Dział Dydaktyki oferuje placówkom dydaktycznym specjalistyczny sprzęt i oprogramowanie
Witold Morawski FESTO DIDACTIC Nowe stanowiska techniczno-dydaktyczne dla potrzeb edukacji mechatronicznej Firma Festo Dział Dydaktyki oferuje placówkom dydaktycznym specjalistyczny sprzęt i oprogramowanie
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
AutoSAT - system gęstego składowania palet z satelitą półautomatycznym
 AutoSAT - system gęstego składowania palet z satelitą półautomatycznym Gęste składowanie i automatyczny transport palet System AutoSAT to doskonałe rozwiązanie do gęstego składowania dużej ilości palet
AutoSAT - system gęstego składowania palet z satelitą półautomatycznym Gęste składowanie i automatyczny transport palet System AutoSAT to doskonałe rozwiązanie do gęstego składowania dużej ilości palet
Wyposażenie nowoczesnego magazynu w urządzenia techniczne. Mariusz Malczewski PROMAG S.A.
 Wyposażenie nowoczesnego magazynu w urządzenia techniczne Mariusz Malczewski Magazyn - regały dynamiczne Regały przejezdne Regały przepływowe Regały paletowe przejezdne Nowoczesne systemy magazynowania
Wyposażenie nowoczesnego magazynu w urządzenia techniczne Mariusz Malczewski Magazyn - regały dynamiczne Regały przejezdne Regały przepływowe Regały paletowe przejezdne Nowoczesne systemy magazynowania
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Deski. Butelki. Bloczki. Zgrzewki Kanistry Szyby
 manipulatory pneumatyczne manipulatory podciśnieniowe wciągniki wózki manipulacyjne Deski Bloczki Butelki Zgrzewki Kanistry Szyby Wciagniki Wciągniki elektryczne (linowe i łańcuchowe) znajdują swoje
manipulatory pneumatyczne manipulatory podciśnieniowe wciągniki wózki manipulacyjne Deski Bloczki Butelki Zgrzewki Kanistry Szyby Wciagniki Wciągniki elektryczne (linowe i łańcuchowe) znajdują swoje
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
OPIS PRZEDMIOTU ZAMÓWIENIA
 Załącznik nr 1 do zapytania ofertowego nr 12/2018 na dostawę i montaż fabrycznie nowej czopiarki do ram okien dachowych OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest dostawa i fabrycznie nowej
Załącznik nr 1 do zapytania ofertowego nr 12/2018 na dostawę i montaż fabrycznie nowej czopiarki do ram okien dachowych OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest dostawa i fabrycznie nowej
E K O N O M I C Z N E R O Z W I Ą Z A N I E. W Y D A J N Y I N I E Z AW O D N Y.
 FALCON. E K O N O M I C Z N E R O Z W I Ą Z A N I E. W Y D A J N Y I N I E Z AW O D N Y. FALCON. Optymalny stosunek kosztów do korzyści gwarantujący sukces. FALCON może być używany do cięcia plazmowego,
FALCON. E K O N O M I C Z N E R O Z W I Ą Z A N I E. W Y D A J N Y I N I E Z AW O D N Y. FALCON. Optymalny stosunek kosztów do korzyści gwarantujący sukces. FALCON może być używany do cięcia plazmowego,
PR242012 23 kwietnia 2012 Mechanika Strona 1 z 5. XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów
 Rozszerzony System Transportowy: nowatorska technologia napędów") Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F
 ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
Rozwiązanie do pozycjonowania i nawigacji dla wózków widłowych
 Rozwiązanie do pozycjonowania i nawigacji dla wózków widłowych Agenda 1 O Firmie 2 3 Idea 4 Technologia 5 Produkt 6 7 8 Projekt 9 Technologia Profil Klienta Rozwiązanie Korzyści & ROI Seite 2 Zeno Track
Rozwiązanie do pozycjonowania i nawigacji dla wózków widłowych Agenda 1 O Firmie 2 3 Idea 4 Technologia 5 Produkt 6 7 8 Projekt 9 Technologia Profil Klienta Rozwiązanie Korzyści & ROI Seite 2 Zeno Track
ROZWIĄZANIA WIZYJNE PRZEMYSŁOWE. Rozwiązania WIZYJNE. Capture the Power of Machine Vision POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD
 POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
WYPOSAŻENIE ZESPOŁU SZKÓŁ NR 1 W BOCHNI PAKIET NR I - WYPOSAŻENIE PRACOWNI ELEKTRYCZNYCH CZ. I
 Modernizacja i wyposażenie bazy dydaktycznej szkolnictwa zawodowego dla Zespołu Szkół Nr 1, Zespołu Szkół Nr 2 oraz Zespołu Szkół Nr 3 w Bochni w ramach Małopolskiego Regionalnego Programu Operacyjnego
Modernizacja i wyposażenie bazy dydaktycznej szkolnictwa zawodowego dla Zespołu Szkół Nr 1, Zespołu Szkół Nr 2 oraz Zespołu Szkół Nr 3 w Bochni w ramach Małopolskiego Regionalnego Programu Operacyjnego
Przypadek praktyczny: Grupo Familia Automatyczny magazyn samonośny dla Grupo Familia zrealizowany w Kolumbii przez Mecalux
 Przypadek praktyczny: Grupo Familia Automatyczny magazyn samonośny dla Grupo Familia zrealizowany w Kolumbii przez Mecalux Lokalizacja: Kolumbia Grupo Familia, firma specjalizująca się papierowych artykułach
Przypadek praktyczny: Grupo Familia Automatyczny magazyn samonośny dla Grupo Familia zrealizowany w Kolumbii przez Mecalux Lokalizacja: Kolumbia Grupo Familia, firma specjalizująca się papierowych artykułach
Informacje o firmie. Ponad 10 lat doświadczenia. Zespół inżynierów i specjalistów liczący ponad 40 osób. Własne laboratorium spawalnicze
 Informacje o firmie Ponad 10 lat doświadczenia Zespół inżynierów i specjalistów liczący ponad 40 osób Własne laboratorium spawalnicze Profesjonalny zespół R&D Współpraca z liderami rynku Bogate portfolio
Informacje o firmie Ponad 10 lat doświadczenia Zespół inżynierów i specjalistów liczący ponad 40 osób Własne laboratorium spawalnicze Profesjonalny zespół R&D Współpraca z liderami rynku Bogate portfolio
Research & Development. Zespół R&D
 Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Składowanie dynamiczne z użyciem konstrukcji regałowych
 Składowanie dynamiczne z użyciem konstrukcji regałowych Regały przepływowe - regał jest nieruchomy, natomiast składowane towary przemieszczają się w stosunku do konstrukcji regału. Składowanie w regale
Składowanie dynamiczne z użyciem konstrukcji regałowych Regały przepływowe - regał jest nieruchomy, natomiast składowane towary przemieszczają się w stosunku do konstrukcji regału. Składowanie w regale
SAMOCHODOWY RADAR POWSZECHNEGO STOSOWANIA
 Koncern Delphi opracował nowy, wielofunkcyjny, elektronicznie skanujący radar (ESR). Dzięki wykorzystaniu pozbawionej ruchomych części i sprawdzonej technologii monolitycznej, radar ESR zapewnia najlepsze
Koncern Delphi opracował nowy, wielofunkcyjny, elektronicznie skanujący radar (ESR). Dzięki wykorzystaniu pozbawionej ruchomych części i sprawdzonej technologii monolitycznej, radar ESR zapewnia najlepsze
Usprawnij swoją produkcję
 Usprawnij swoją produkcję Manipulatory Specyfikacje 2 Marka Plastigo Plastigo to marka, która należy do grona liderów wśród polskich dostawców wtryskarek oraz urządzeń peryferyjnych. Bogaty asortyment
Usprawnij swoją produkcję Manipulatory Specyfikacje 2 Marka Plastigo Plastigo to marka, która należy do grona liderów wśród polskich dostawców wtryskarek oraz urządzeń peryferyjnych. Bogaty asortyment
Przypadek praktyczny: Kern Pharma Kern Pharma rozbudowuje centrum logistyczne w związku z rozwojem firmy
 Przypadek praktyczny: Kern Pharma Kern Pharma rozbudowuje centrum logistyczne w związku z rozwojem firmy Lokalizacja: Hiszpania Nowy automatyczny magazyn samonośny zbudowany dla firmy Kern Pharma w hiszpańskiej
Przypadek praktyczny: Kern Pharma Kern Pharma rozbudowuje centrum logistyczne w związku z rozwojem firmy Lokalizacja: Hiszpania Nowy automatyczny magazyn samonośny zbudowany dla firmy Kern Pharma w hiszpańskiej
Plan wykładu. Podstawowe pojęcia i definicje
 Organizacja procesów biznesowych System produkcyjny dr hab. inż 1/1 Plan wykładu Proces produkcyjny System produkcyjny Klasyfikacja systemów produkcyjnych Typy, formy i odmiany organizacji produkcji Struktura
Organizacja procesów biznesowych System produkcyjny dr hab. inż 1/1 Plan wykładu Proces produkcyjny System produkcyjny Klasyfikacja systemów produkcyjnych Typy, formy i odmiany organizacji produkcji Struktura
Przypadek praktyczny: Didactic Pallet Shuttle szybko i sprawnie dostarcza narzędzia i sprzęt medyczny
 Przypadek praktyczny: Didactic Pallet Shuttle szybko i sprawnie dostarcza narzędzia i sprzęt medyczny Lokalizacja: Francja Mecalux wyposażył magazyn firmy Didactic we Francji w system Pallet Shuttle. Firma
Przypadek praktyczny: Didactic Pallet Shuttle szybko i sprawnie dostarcza narzędzia i sprzęt medyczny Lokalizacja: Francja Mecalux wyposażył magazyn firmy Didactic we Francji w system Pallet Shuttle. Firma
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
MS Najważniejsze cechy. Główny zadanie: Podnoszenie
 MS10-20 Najważniejsze cechy Główny zadanie: Podnoszenie Środowisko: Wewnątrz Ładunek: 1000-2000 kg Maksymalna wysokość: 2603-6020 mm Źródło zasilania: Elektryczny Wózek podnośnikowy do wysokiego składowania
MS10-20 Najważniejsze cechy Główny zadanie: Podnoszenie Środowisko: Wewnątrz Ładunek: 1000-2000 kg Maksymalna wysokość: 2603-6020 mm Źródło zasilania: Elektryczny Wózek podnośnikowy do wysokiego składowania
Made for the future: ArciTech. Informacje podstawowe
 Made for the future: ArciTech Informacje podstawowe Made for the future: ArciTech 2 Niewiarygodnie szeroki program produktów na bazie jednej platformy: Nieskończona różnorodność Maksymalna elastyczność
Made for the future: ArciTech Informacje podstawowe Made for the future: ArciTech 2 Niewiarygodnie szeroki program produktów na bazie jednej platformy: Nieskończona różnorodność Maksymalna elastyczność
kierowanych pojazdów podwodnych
 Systemy wspomagające obsługę zdalnie kierowanych pojazdów podwodnych Łukasz Józefowicz, 228934 ROV, czyli zdalnie kierowane pojazdy podwodne Skrót ROV pochodzi z języka angielskiego (Remotely Operated
Systemy wspomagające obsługę zdalnie kierowanych pojazdów podwodnych Łukasz Józefowicz, 228934 ROV, czyli zdalnie kierowane pojazdy podwodne Skrót ROV pochodzi z języka angielskiego (Remotely Operated
Przypadek praktyczny: Amagosa Amagosa automatyzuje swoje centrum logistyczne
 Przypadek praktyczny: Amagosa Amagosa automatyzuje swoje centrum logistyczne Lokalizacja: Hiszpania Amagosa, firma specjalizująca się w dystrybucji napojów i żywności, w tym produktów dla branży gastronomicznej,
Przypadek praktyczny: Amagosa Amagosa automatyzuje swoje centrum logistyczne Lokalizacja: Hiszpania Amagosa, firma specjalizująca się w dystrybucji napojów i żywności, w tym produktów dla branży gastronomicznej,
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok
 Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
ZASADY DOBREJ PRAKTYKI PRZY PROJEKTOWANIU I EKSPLOATACJI URZĄDZEŃ GOSPODARKI MAGAZYNOWEJ. w w w. p r o m a g. p l
 Dobór regałów magazynowych i wózków jezdniowych widłowych w projektowaniu i eksploatacji jest istotnie określony przez warunki środowiska pracy. W szczególności środowisko pracy opisane jest przez ustalenie
Dobór regałów magazynowych i wózków jezdniowych widłowych w projektowaniu i eksploatacji jest istotnie określony przez warunki środowiska pracy. W szczególności środowisko pracy opisane jest przez ustalenie
Przegląd rodziny produktów. MRS1000 Outdoor to nasz czwarty wymiar CZUJNIKI 3D LIDAR
 Przegląd rodziny produktów Outdoor to nasz czwarty wymiar Zalety A TO NASZ CZWARTY WYMIAR B C D E F Czujnik 3D LiDAR jest idealnym rozwiązaniem do zastosowań wewnętrznych i zewnętrznych, nawet w niesprzyjających
Przegląd rodziny produktów Outdoor to nasz czwarty wymiar Zalety A TO NASZ CZWARTY WYMIAR B C D E F Czujnik 3D LiDAR jest idealnym rozwiązaniem do zastosowań wewnętrznych i zewnętrznych, nawet w niesprzyjających
FORMULARZ PARAMETRY TECHNICZNE
 FORMULARZ PARAMETRY TECHNICZNE Załącznik nr Składając w imieniu: ofertę w odpowiedzi na zapytanie ofertowe pn.: Dostawa robotów, w ramach projektu pn. "Łowcy naukowych przygód" Zadanie 6: Indywidualizacja
FORMULARZ PARAMETRY TECHNICZNE Załącznik nr Składając w imieniu: ofertę w odpowiedzi na zapytanie ofertowe pn.: Dostawa robotów, w ramach projektu pn. "Łowcy naukowych przygód" Zadanie 6: Indywidualizacja
Przypadek praktyczny: Trumpler Funkcjonalność i wydajność automatycznego magazynu firmy Trumpler
 Przypadek praktyczny: Trumpler Funkcjonalność i wydajność automatycznego magazynu firmy Trumpler Lokalizacja: Hiszpania Mecalux dostarczył firmie Trumpler automatyczny magazyn składający się z regałów
Przypadek praktyczny: Trumpler Funkcjonalność i wydajność automatycznego magazynu firmy Trumpler Lokalizacja: Hiszpania Mecalux dostarczył firmie Trumpler automatyczny magazyn składający się z regałów
kierunkowy (podstawowy / kierunkowy / inny HES) obowiązkowy (obowiązkowy / nieobowiązkowy) Polski semestr pierwszy
 obowiązkowy (obowiązkowy / nieobowiązkowy) Polski semestr pierwszy") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Robotyzacja procesów produkcyjnych
 www.castorautomatyka.pl CASTOR - Automatyka przemysłowa Robotyzacja procesów produkcyjnych Szlifowanie Gratowanie Ciecie Odlewów Współpraca Firm Metals Minerals Sp. z o.o. oraz CASTOR Unia Gospodarcza
www.castorautomatyka.pl CASTOR - Automatyka przemysłowa Robotyzacja procesów produkcyjnych Szlifowanie Gratowanie Ciecie Odlewów Współpraca Firm Metals Minerals Sp. z o.o. oraz CASTOR Unia Gospodarcza
Przypadek praktyczny: United Caps Automatyczny magazyn wjezdny z systemem Pallet Shuttle dla producenta zakrętek
 Przypadek praktyczny: United Caps Automatyczny magazyn wjezdny z systemem Pallet Shuttle dla producenta zakrętek Lokalizacja: Luksemburg United Caps, spółka specjalizująca się w projektowaniu i produkcji
Przypadek praktyczny: United Caps Automatyczny magazyn wjezdny z systemem Pallet Shuttle dla producenta zakrętek Lokalizacja: Luksemburg United Caps, spółka specjalizująca się w projektowaniu i produkcji
CENA DETALICZNA 655 PLN
 TV PHANTOM 505B Telewizor i monitor 5". Licencja TOSHIBA, zasilanie 220V/12V, 69 kanałów telewizyjnych, pracuje w systemach PAL/NTSC/SECAM, wyjście AV/VIDEO, pilot zdalnego sterowania, wyjście do podłączenia
TV PHANTOM 505B Telewizor i monitor 5". Licencja TOSHIBA, zasilanie 220V/12V, 69 kanałów telewizyjnych, pracuje w systemach PAL/NTSC/SECAM, wyjście AV/VIDEO, pilot zdalnego sterowania, wyjście do podłączenia
4. Chwytaki robotów przemysłowych Wstęp Metody doboru chwytaków robotów przemysłowych Zasady projektowania chwytaków robotów
 Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
MSPO 2014: STABILIZOWANE GŁOWICE OPTOELEKTRONICZNE PCO
 aut. Maksymilian Dura 03.09.2014 MSPO 2014: STABILIZOWANE GŁOWICE OPTOELEKTRONICZNE PCO PCO S. A. opracowała nowoczesne kamery termowizyjne (IR) i wykorzystała je w stabilizowanych głowicach optoelektronicznych,
aut. Maksymilian Dura 03.09.2014 MSPO 2014: STABILIZOWANE GŁOWICE OPTOELEKTRONICZNE PCO PCO S. A. opracowała nowoczesne kamery termowizyjne (IR) i wykorzystała je w stabilizowanych głowicach optoelektronicznych,
MiAcz3. Elektryczne maszynowe napędy wykonawcze
 MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
SYSTEMY MAGAZYNOWANIA
 SYSTEMY MAGAZYNOWANIA Automatyzacja - lepsza wydajność i ergonomia pracy MAGAZYN BLACH MAGAZYN DREWNA MAGAZYN NARZĘDZI KORZYŚCI Z ZASTOSOWANIA Automatyczne składowanie materiałów jest rozwiązaniem o charakterze
SYSTEMY MAGAZYNOWANIA Automatyzacja - lepsza wydajność i ergonomia pracy MAGAZYN BLACH MAGAZYN DREWNA MAGAZYN NARZĘDZI KORZYŚCI Z ZASTOSOWANIA Automatyczne składowanie materiałów jest rozwiązaniem o charakterze
Laboratorium Napędu Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
PORZĄDEK W MAGAZYNIE POPRAWA BEZPIECZEŃSTWA PRACY MNIEJ STRAT I KONTUZJI
 PORZĄDEK W MAGAZYNIE POPRAWA BEZPIECZEŃSTWA PRACY MNIEJ STRAT I KONTUZJI Efektywne składowanie palet - eliminacja ręcznego podnoszenia palet Korzyści, jakie zapewnia PALOMAT Oszczędność miejsca i porządek
PORZĄDEK W MAGAZYNIE POPRAWA BEZPIECZEŃSTWA PRACY MNIEJ STRAT I KONTUZJI Efektywne składowanie palet - eliminacja ręcznego podnoszenia palet Korzyści, jakie zapewnia PALOMAT Oszczędność miejsca i porządek
Przypadek praktyczny: SLVA Akumulacyjny system Pallet Shuttle: idealne rozwiązanie do składowania mleka wdrożone w magazynie firmy SLVA
 Przypadek praktyczny: SLVA Akumulacyjny system Pallet Shuttle: idealne rozwiązanie do składowania mleka wdrożone w magazynie firmy SLVA Lokalizacja: Francja SLVA, francuski producent i dostawca mleka,
Przypadek praktyczny: SLVA Akumulacyjny system Pallet Shuttle: idealne rozwiązanie do składowania mleka wdrożone w magazynie firmy SLVA Lokalizacja: Francja SLVA, francuski producent i dostawca mleka,
Orange Smart City. Piotr Janiak Orange Polska
 Orange Smart City Piotr Janiak Orange Polska Wybrane linie produktowe Zdalny odczyt wodomierzy i monitoring sieci wod-kan Energooszczędne i zarządzane oświetlenie Nowoczesny rower miejski Monitorowanie
Orange Smart City Piotr Janiak Orange Polska Wybrane linie produktowe Zdalny odczyt wodomierzy i monitoring sieci wod-kan Energooszczędne i zarządzane oświetlenie Nowoczesny rower miejski Monitorowanie
System pomiaru paliwa
 System pomiaru paliwa System pomiaru paliwa w autach ciężarowych jest oparty na zastosowaniu bardzo dokładnych szwajcarskich przepływomierzy cyfrowych. Przepływomierz paliwa mierzy realne zużycie paliwa
System pomiaru paliwa System pomiaru paliwa w autach ciężarowych jest oparty na zastosowaniu bardzo dokładnych szwajcarskich przepływomierzy cyfrowych. Przepływomierz paliwa mierzy realne zużycie paliwa
BEZPIECZNY OBIEKT Zabezpiecz Kontroluj Zarządzaj Oszczędzaj
 BEZPIECZNY OBIEKT Zabezpiecz Kontroluj Zarządzaj Oszczędzaj PRO BEZPIECZNY OBIEKT Większe zyski Twojej firmy to nie tylko rosnąca sprzedaż i powiekszanie grupy odbiorców. Ich wzrost osiągniesz również
BEZPIECZNY OBIEKT Zabezpiecz Kontroluj Zarządzaj Oszczędzaj PRO BEZPIECZNY OBIEKT Większe zyski Twojej firmy to nie tylko rosnąca sprzedaż i powiekszanie grupy odbiorców. Ich wzrost osiągniesz również
Trackery Leica Absolute
 BROSZURA PRODUKTU Trackery Leica Absolute Rozwiązania pomiarowe Leica Leica Absolute Tracker AT402 z sondą B-Probe Ultra przenośny system pomiarowy klasy podstawowej Leica B-Probe to ręczne i zasilane
BROSZURA PRODUKTU Trackery Leica Absolute Rozwiązania pomiarowe Leica Leica Absolute Tracker AT402 z sondą B-Probe Ultra przenośny system pomiarowy klasy podstawowej Leica B-Probe to ręczne i zasilane
Wpływ robotyzacji na konkurencyjność polskich przedsiębiorstw. Krzysztof Łapiński. Warszawa, 20 września 2016 r. Świat
 Wpływ robotyzacji na konkurencyjność polskich przedsiębiorstw Krzysztof Łapiński Warszawa, 2 września 216 r. Świat Globalna sprzedaż robotów przemysłowych w latach 21 215 (w tys. sztuk) 3 25 2 15 1 5 78
Wpływ robotyzacji na konkurencyjność polskich przedsiębiorstw Krzysztof Łapiński Warszawa, 2 września 216 r. Świat Globalna sprzedaż robotów przemysłowych w latach 21 215 (w tys. sztuk) 3 25 2 15 1 5 78
NetMarker STOŁOWY SYSTEM
 S TO Ł O W Y S Y S T E M D O Z N A K O WA N I A N e t M a r k e r NetMarker KOMPAKTOWY STOŁOWY SYSTEM DO ZNAKOWANIA Innowacyjny stołowy system do znakowania CNC NetMarker odznacza się jakością znakowania,
S TO Ł O W Y S Y S T E M D O Z N A K O WA N I A N e t M a r k e r NetMarker KOMPAKTOWY STOŁOWY SYSTEM DO ZNAKOWANIA Innowacyjny stołowy system do znakowania CNC NetMarker odznacza się jakością znakowania,
Roboty stereotaktyczne
 Roboty stereotaktyczne www.animalab.pl 01 Robot stereotaktyczny Neurostar jest twórcą i jedynym producentem robotów stereotaktycznych. Używając robotów stereotaktycznych użytkownik skupia się na eksperymencie,
Roboty stereotaktyczne www.animalab.pl 01 Robot stereotaktyczny Neurostar jest twórcą i jedynym producentem robotów stereotaktycznych. Używając robotów stereotaktycznych użytkownik skupia się na eksperymencie,
1. Zestaw komputerowy 68 sztuk Obudowa Minitower, min. 2 zatoki zewnętrzne 5.25 i 2 wewnętrzne 3.5
 1. Zestaw komputerowy 68 sztuk Obudowa Minitower, min. 2 zatoki zewnętrzne 5.25 i 2 wewnętrzne 3.5 Procesor Pamięć RAM Płyta główna BIOS Dyski 64bit o architekturze x86, osiągający w teście PassMark CPU
1. Zestaw komputerowy 68 sztuk Obudowa Minitower, min. 2 zatoki zewnętrzne 5.25 i 2 wewnętrzne 3.5 Procesor Pamięć RAM Płyta główna BIOS Dyski 64bit o architekturze x86, osiągający w teście PassMark CPU
Projekt nr POIG /09. Tytuł: Rozbudowa przedsiębiorstwa w oparciu o innowacyjne technologie produkcji konstrukcji przemysłowych
 Projekt nr POIG.04.04.00-24-013/09 Tytuł: Rozbudowa przedsiębiorstwa w oparciu o innowacyjne technologie produkcji konstrukcji przemysłowych Projekt współfinansowany przez Unię Europejską z Europejskiego
Projekt nr POIG.04.04.00-24-013/09 Tytuł: Rozbudowa przedsiębiorstwa w oparciu o innowacyjne technologie produkcji konstrukcji przemysłowych Projekt współfinansowany przez Unię Europejską z Europejskiego
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Poziome centra obróbkowe TBI SH 1000 (SK50)
") Poziome centra obróbkowe TBI SH 1000 (SK50) Precyzyjna, seryjna obróbka wielostronna oraz obróbka dużych skomplikowanych detali przestrzennych w jednym zamocowaniu. Ver_052017_02 Dbamy o solidną podstawę
Poziome centra obróbkowe TBI SH 1000 (SK50) Precyzyjna, seryjna obróbka wielostronna oraz obróbka dużych skomplikowanych detali przestrzennych w jednym zamocowaniu. Ver_052017_02 Dbamy o solidną podstawę
PORZĄDEK W MAGAZYNIE POPRAWA BEZPIECZEŃSTWA PRACY MNIEJ STRAT I KONTUZJI
 PORZĄDEK W MAGAZYNIE POPRAWA BEZPIECZEŃSTWA PRACY MNIEJ STRAT I KONTUZJI Efektywne składowanie palet - eliminacja ręcznego podnoszenia palet Korzyści, jakie zapewnia PALOMAT Oszczędność miejsca i porządek
PORZĄDEK W MAGAZYNIE POPRAWA BEZPIECZEŃSTWA PRACY MNIEJ STRAT I KONTUZJI Efektywne składowanie palet - eliminacja ręcznego podnoszenia palet Korzyści, jakie zapewnia PALOMAT Oszczędność miejsca i porządek
Przemysł 4.0 Industry 4.0 Internet of Things Fabryka cyfrowa. Systemy komputerowo zintegrowanego wytwarzania CIM
 Przemysł 4.0 Industry 4.0 Internet of Things Fabryka cyfrowa Systemy komputerowo zintegrowanego wytwarzania CIM Geneza i pojęcie CIM CIM (Computer Integrated Manufacturing) zintegrowane przetwarzanie informacji
Przemysł 4.0 Industry 4.0 Internet of Things Fabryka cyfrowa Systemy komputerowo zintegrowanego wytwarzania CIM Geneza i pojęcie CIM CIM (Computer Integrated Manufacturing) zintegrowane przetwarzanie informacji
- WALKER Czteronożny robot kroczący
 - WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
- WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
Mechatronika i inteligentne systemy produkcyjne. Sensory (czujniki)
") Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
NOWOŚĆ EASYLOCK SYSTEMY MOCOWANIA ZERO-PUNKT. Systemy palet z przyrządami mocującymi z jednej ręki
 NOWOŚĆ EASYLOCK SYSTEMY MOCOWANIA ZERO-PUNKT Systemy palet z przyrządami mocującymi z jednej ręki EASYLOCK SYSTEMY MOCOWANIA ZERO-PUNKT W przypadku obróbek jednostkowych i mało-seryjnych, ustawianie przedmiotu
NOWOŚĆ EASYLOCK SYSTEMY MOCOWANIA ZERO-PUNKT Systemy palet z przyrządami mocującymi z jednej ręki EASYLOCK SYSTEMY MOCOWANIA ZERO-PUNKT W przypadku obróbek jednostkowych i mało-seryjnych, ustawianie przedmiotu
W Laboratorium Robotyki znajdują się m.in.:
 W Laboratorium Robotyki znajdują się m.in.: robot Kawasaki FS003N z komputerem Kawasaki, kamerą ueye (z oryginalnymi kluczami dostępu), kontrolerem, Teach Pendant, przewodem do komunikacji między kamerą,
W Laboratorium Robotyki znajdują się m.in.: robot Kawasaki FS003N z komputerem Kawasaki, kamerą ueye (z oryginalnymi kluczami dostępu), kontrolerem, Teach Pendant, przewodem do komunikacji między kamerą,
[isee 2] KAMERA IP HD/P2P/WI-FI... KARTA PRODUKTOWA WI-FI WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY OBSŁUGA
![[isee 2] KAMERA IP HD/P2P/WI-FI... KARTA PRODUKTOWA WI-FI WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY OBSŁUGA](/thumbs/98/136286524.jpg "[isee 2] KAMERA IP HD/P2P/WI-FI... KARTA PRODUKTOWA WI-FI WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY OBSŁUGA") OBSŁUGA RUCHOMA GŁOWICA 349 H 84 V [isee 2] KAMERA IP HD/P2P/WI-FI... KARTA PRODUKTOWA WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY 720 P WI-FI [isee 2 WSZĘDZIE I NA
OBSŁUGA RUCHOMA GŁOWICA 349 H 84 V [isee 2] KAMERA IP HD/P2P/WI-FI... KARTA PRODUKTOWA WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY 720 P WI-FI [isee 2 WSZĘDZIE I NA
PRODUCT INFORMATION INTERROLL CONVEYORCONTROL NOWY WYMIAR W BEZDOTYKOWEJ AKUMULACJI TOWARU (ZPA)
") PRODUCT INFORMATION INTERROLL CONVEYORCONTROL NOWY WYMIAR W BEZDOTYKOWEJ AKUMULACJI TOWARU (ZPA) INTERROLL CONVEYORCONTROL: STEROWANIA DLA SZYBKA INSTALACJA, ELASTYCZNA KONFIGURACJA I STOPIEŃ OCHRONY IP54
PRODUCT INFORMATION INTERROLL CONVEYORCONTROL NOWY WYMIAR W BEZDOTYKOWEJ AKUMULACJI TOWARU (ZPA) INTERROLL CONVEYORCONTROL: STEROWANIA DLA SZYBKA INSTALACJA, ELASTYCZNA KONFIGURACJA I STOPIEŃ OCHRONY IP54
Wagi kontrolne. Seria C Wydajne rozwiązania ważenia kontrolnego
 Wagi kontrolne Wagi kontrolne serii C Globalne rozwiązania Dopasowane do potrzeb Inwestycja w przyszłość Seria C Wydajne rozwiązania ważenia kontrolnego Wagi kontrolne Wagi kontrolne serii C Troszczymy
Wagi kontrolne Wagi kontrolne serii C Globalne rozwiązania Dopasowane do potrzeb Inwestycja w przyszłość Seria C Wydajne rozwiązania ważenia kontrolnego Wagi kontrolne Wagi kontrolne serii C Troszczymy
[HOME] 1080 P KAMERA IP FULLHD/P2P/WI-FI... KARTA PRODUKTOWA WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY
![[HOME] 1080 P KAMERA IP FULLHD/P2P/WI-FI... KARTA PRODUKTOWA WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY](/thumbs/97/131853579.jpg "[HOME] 1080 P KAMERA IP FULLHD/P2P/WI-FI... KARTA PRODUKTOWA WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY") [HOME] KAMERA IP FULLHD/P2P/WI-FI... KARTA PRODUKTOWA RUCHOMA GŁOWICA 349 H 84 V 1080 P OBSŁUGA WI-FI WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY [HOME WSZĘDZIE I NA
[HOME] KAMERA IP FULLHD/P2P/WI-FI... KARTA PRODUKTOWA RUCHOMA GŁOWICA 349 H 84 V 1080 P OBSŁUGA WI-FI WI-FI OBSŁUGA PRZEZ APLIKACJĘ OBROTOWA GŁOWICA OBSŁUGA KART MICRO SD TRYB NOCNY [HOME WSZĘDZIE I NA
Samochodowe systemy kontrolno dyspozytorskie GPS
 Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
Przypadek praktyczny: BH Bikes Dwa magazyny automatyczne w nowym centrum logistycznym BH Bikes. Lokalizacja: Hiszpania
 Przypadek praktyczny: BH Bikes Dwa magazyny automatyczne w nowym centrum logistycznym BH Bikes Lokalizacja: Hiszpania Dzięki budowie nowego centrum logistycznego, składającego się z automatycznego magazynu
Przypadek praktyczny: BH Bikes Dwa magazyny automatyczne w nowym centrum logistycznym BH Bikes Lokalizacja: Hiszpania Dzięki budowie nowego centrum logistycznego, składającego się z automatycznego magazynu
System bezpośredniego i zdalnego monitoringu geodezyjnego Część 1
 Sprawa Nr RAP.272.17.20134 załącznik nr 6.1. do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:... NAZWA PRZEDMIOTU ZAMÓWIENIA:
Sprawa Nr RAP.272.17.20134 załącznik nr 6.1. do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:... NAZWA PRZEDMIOTU ZAMÓWIENIA:
SYSTEM POZYCJONOWANIA PRZESTRZENNEGO Przełomowa technologia dla procesów montażowych
 SYSTEM POZYCJONOWANIA PRZESTRZENNEGO Przełomowa technologia dla procesów montażowych 1. BŁĘDY PODCZAS MONTAŻU System pozycjonowania przestrzennego Iris rozwiązuje problemy konwencjonalnego montażu wykorzystującego
SYSTEM POZYCJONOWANIA PRZESTRZENNEGO Przełomowa technologia dla procesów montażowych 1. BŁĘDY PODCZAS MONTAŻU System pozycjonowania przestrzennego Iris rozwiązuje problemy konwencjonalnego montażu wykorzystującego
Rzeczywistość rozszerzona: czujniki do akwizycji obrazów RGB-D. Autor: Olga Głogowska 207 505 AiR II
 Rzeczywistość rozszerzona: czujniki do akwizycji obrazów RGB-D Autor: Olga Głogowska 207 505 AiR II Czujniki w robotyce coraz większego znaczenia nabierają systemy pomiarowe umożliwiające interakcję robota
Rzeczywistość rozszerzona: czujniki do akwizycji obrazów RGB-D Autor: Olga Głogowska 207 505 AiR II Czujniki w robotyce coraz większego znaczenia nabierają systemy pomiarowe umożliwiające interakcję robota
PALETMASTER automatyczne magazynki pustych palet
 PALETMASTER automatyczne magazynki pustych palet Bezpieczne i wygodne rozwiązanie dla problemu pustych palet Automatyczne magazynki pustych palet poprawiają organizację ich składowania, zwiększają efektywność
PALETMASTER automatyczne magazynki pustych palet Bezpieczne i wygodne rozwiązanie dla problemu pustych palet Automatyczne magazynki pustych palet poprawiają organizację ich składowania, zwiększają efektywność
Hiab XS 033 Moment udźwigu 2,8-3,3 Tm
 Hiab XS 033 Moment udźwigu 2,8-3,3 Tm Broszura produktu Wszechstronne narzędzie Hiab XS 033 oferuje nieco więcej Hiab XS 033 zapewnia wydajność, jakiej wymagacie w codziennej pracy. Jest to mały, wszechstronny
Hiab XS 033 Moment udźwigu 2,8-3,3 Tm Broszura produktu Wszechstronne narzędzie Hiab XS 033 oferuje nieco więcej Hiab XS 033 zapewnia wydajność, jakiej wymagacie w codziennej pracy. Jest to mały, wszechstronny
ScrappiX. Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni
 ScrappiX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni Scrappix jest innowacyjnym urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni przedmiotów okrągłych
ScrappiX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni Scrappix jest innowacyjnym urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni przedmiotów okrągłych
IRB PODSUMOWANIE:
 IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia
 Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Procesor. Pamięć RAM. Dysk twardy. Karta grafiki
 Komputer stacjonarny typ A 36 sztuk Formularz 1.2 Symbol Procesor Wydajność uzyskana w teście Passmark CPU Mark punktów Pamięć RAM TYP DDR 3 Częstotliwość taktowania Pojemność zainstalowana Pojemność maksymalna
Komputer stacjonarny typ A 36 sztuk Formularz 1.2 Symbol Procesor Wydajność uzyskana w teście Passmark CPU Mark punktów Pamięć RAM TYP DDR 3 Częstotliwość taktowania Pojemność zainstalowana Pojemność maksymalna
TOYOTA MATERIAL HANDLING EUROPE. 25/09/2009 - page 1
 25/09/2009 - page 1 BT RADIOSHUTTLE ZAUTOMATYZOWANY SYSTEM GĘSTEGO SKŁADOWANIA 25/09/2009 - page 2 SYSTEMY GĘSTEGO SKŁADOWANIA Możliwości i zalety: Lepsze wykorzystanie przestrzeni Więcej przestrzeni magazynowej
25/09/2009 - page 1 BT RADIOSHUTTLE ZAUTOMATYZOWANY SYSTEM GĘSTEGO SKŁADOWANIA 25/09/2009 - page 2 SYSTEMY GĘSTEGO SKŁADOWANIA Możliwości i zalety: Lepsze wykorzystanie przestrzeni Więcej przestrzeni magazynowej
1 105,07 PLN brutto 898,43 PLN netto
 Xiaomi Mi Robot Vacuum Cleaner Robot Sprzątający Odkurzacz Biały 1 105,07 PLN brutto 898,43 PLN netto Producent: XIAOMI Xiaomi MiJia Roborock Mi Robot Vacuum Cleaner White Inteligentny odkurzacz do domu
Xiaomi Mi Robot Vacuum Cleaner Robot Sprzątający Odkurzacz Biały 1 105,07 PLN brutto 898,43 PLN netto Producent: XIAOMI Xiaomi MiJia Roborock Mi Robot Vacuum Cleaner White Inteligentny odkurzacz do domu
Przegląd rodziny produktów. Dx1000 Wydajność połączona z niezawodnym pomiarem odległości DALMIERZE DALEKIEGO ZASIĘGU
 Przegląd rodziny produktów Wydajność połączona z niezawodnym pomiarem odległości Zalety A Ć POŁĄCZONA Z NIEZAWODNYM PODLEGŁOŚCI B C D E Innowacyjna technologia gwarantuje niezawodne wyniki pomiaru F Gdy
Przegląd rodziny produktów Wydajność połączona z niezawodnym pomiarem odległości Zalety A Ć POŁĄCZONA Z NIEZAWODNYM PODLEGŁOŚCI B C D E Innowacyjna technologia gwarantuje niezawodne wyniki pomiaru F Gdy
Przypadek praktyczny: Alfrisan Nowoczesne centrum logistyczne z sześcioma mroźniami
 Przypadek praktyczny: Alfrisan Nowoczesne centrum logistyczne z sześcioma mroźniami Lokalizacja: Hiszpania Hiszpański operator logistyczny Alfrisan posiada w miejscowości San Isidro sześć mroźni. Mecalux
Przypadek praktyczny: Alfrisan Nowoczesne centrum logistyczne z sześcioma mroźniami Lokalizacja: Hiszpania Hiszpański operator logistyczny Alfrisan posiada w miejscowości San Isidro sześć mroźni. Mecalux
Centrum Badań i Rozwoju Nowoczesnych Technologii
 Centrum Badań i Rozwoju Nowoczesnych Technologii GMINA NEKLA GMINA WRZEŚNIA POZNAŃ GMINA KOŁACZKOWO KONIN współpraca na linii nauka - przemysł GMINA MIŁOSŁAW GMINA PYZDRY Września, 24 marca 2017 rok Zmiany
Centrum Badań i Rozwoju Nowoczesnych Technologii GMINA NEKLA GMINA WRZEŚNIA POZNAŃ GMINA KOŁACZKOWO KONIN współpraca na linii nauka - przemysł GMINA MIŁOSŁAW GMINA PYZDRY Września, 24 marca 2017 rok Zmiany
ROBOTY AUTOMATYZACJA PRODUKCJI
 ROBOTY AUTOMATYZACJA PRODUKCJI Roboty godne zaufania 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI ROBOT PNEUMATYCZNY TYPU PICKER SPRAWDZONA KONSTRUKCJA I IDEALNIE
ROBOTY AUTOMATYZACJA PRODUKCJI Roboty godne zaufania 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI ROBOT PNEUMATYCZNY TYPU PICKER SPRAWDZONA KONSTRUKCJA I IDEALNIE
Lokalizacja: Hiszpania
 Przypadek praktyczny: EGO Appliance Controls EGO Appliance Controls zwiększa wydajność swojego magazynu dzięki zastosowaniu trzech systemów składowania Lokalizacja: Hiszpania Firma EGO Appliance Controls
Przypadek praktyczny: EGO Appliance Controls EGO Appliance Controls zwiększa wydajność swojego magazynu dzięki zastosowaniu trzech systemów składowania Lokalizacja: Hiszpania Firma EGO Appliance Controls
RAV TD 1780 BTH 1760 BTH 1780E 1760E URZĄDZENIA DO POMIARU GEOMETRII KÓŁ Z SERII TOTAL DRIVE 1700
 od 1958 roku (0) 32-352-40-33, fax (0) 32-254-86-63 (0) 501-567-447, (0) 509-815-919 biuro@autotechnika.net www.autotechnika.net ul. 1-go Maja 79 41-706 Ruda Śląska URZĄDZENIA DO POMIARU GEOMETRII KÓŁ
od 1958 roku (0) 32-352-40-33, fax (0) 32-254-86-63 (0) 501-567-447, (0) 509-815-919 biuro@autotechnika.net www.autotechnika.net ul. 1-go Maja 79 41-706 Ruda Śląska URZĄDZENIA DO POMIARU GEOMETRII KÓŁ
Przegląd rodziny produktów. InspectorP64x Konfigurowalna. Programowalna. Ekonomiczna. Szybka. SYSTEMY WIZYJNE 2D
 Przegląd rodziny produktów InspectorP64x Konfigurowalna. Programowalna. Ekonomiczna. Szybka. Zalety A OWALNA. PROGRAMOWALNA. EKONOZYBKA. B C D funkcjonalność kamer 2D InspectorP6xx za pomocą aplikacji
Przegląd rodziny produktów InspectorP64x Konfigurowalna. Programowalna. Ekonomiczna. Szybka. Zalety A OWALNA. PROGRAMOWALNA. EKONOZYBKA. B C D funkcjonalność kamer 2D InspectorP6xx za pomocą aplikacji
Przegląd rodziny produktów. LMS1000 Błyskawiczny pomiar w rekordowym czasie! CZUJNIKI 2D LIDAR
 Przegląd rodziny produktów LMS1000 Błyskawiczny pomiar w rekordowym czasie! Zalety A CZNY POMIAR W REKORDOWYM CZAB C D E F Czujnik 2D LiDAR LMS1000 jest idealnym rozwiązaniem do zastosowań wewnętrznych
Przegląd rodziny produktów LMS1000 Błyskawiczny pomiar w rekordowym czasie! Zalety A CZNY POMIAR W REKORDOWYM CZAB C D E F Czujnik 2D LiDAR LMS1000 jest idealnym rozwiązaniem do zastosowań wewnętrznych