Porównanie wyników symulacji wpływu kształtu i amplitudy zakłóceń na jakość sterowania piecem oporowym w układzie z regulatorem PID lub rozmytym
|
|
|
- Kinga Kamińska
- 5 lat temu
- Przeglądów:
Transkrypt
1 ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN ( ) Volume 15 Special Issue 4/ /4 Porównanie wyników symulacji wpływu kształtu i amplitudy zakłóceń na jakość sterowania piecem oporowym w układzie z regulatorem lub rozmytym P. Śmierciak 1, E. Ziółkowski 2 1 Akademia Górniczo-Hutnicza im. S. Staszica w Krakowie, Wydział Odlewnictwa, Kraków, ul. Reymonta 23 2 Kontakt korespondencyjny: ez@agh.edu.pl Otrzymano ; zaakceptowano do druku Streszczenie W artykule przedstawiono wpływ wybranych parametrów zakłóceń na jakość sterowania automatycznego układu z regulatorem klasycznym oraz optymalnie nastrojonym regulatorem rozmytym o założonej strukturze. Na podstawie przedstawionych wyników symulacji pracy odlewniczego elektrycznego pieca oporowego dokonano oceny jakości sterowania dla przyjętych całkowych kryteriów jakości sterowania. Ocenie poddano błąd sterowania oraz kształt sygnału sterującego obiektem. Słowa kluczowe: odlewnicze piece oporowe, regulatory i rozmyte, jakość sterowania 1. Wprowadzenie W celu oceny jakości sterowania odlewniczym piecem oporowym z zastosowaniem regulatora rozmytego zaprojektowano w środowisku Matlab/Simulink [4] układ symulacyjny, którego schemat przedstawiono na rysunku 1. Przyjęto model pieca opisany w pracach [5, 6]. Układ ten zawiera także podsystem sterowania za pomocą klasycznego regulatora, którego parametry zostały zoptymalizowane przez procedurę zawartą w pakiecie Simulink. Stwarza to możliwość porównania jakości sterowania piecem za pomocą zoptymalizowanego regulatora i regulatora rozmytego. Regulator rozmyty zaprojektowano zgodnie z zasadami przedstawionymi między innymi w pracach [1-3]. Definicję tego regulatora omówiono w pracach [5-6]. W pracy [5] przedstawiono także matematyczne formuły wskaźników jakości sterowania przyjętych do realizacji oceny pracy układów symulacyjnych. Przez jakość sterowania rozumie się tutaj nie tylko całkę wartości bezwzględnej różnicy odpowiedzi układu sterowania względem wartości założonych w przedziale czasowym procesu, ale także wyrażone funkcją całkową wartość bezwzględną różnicy pochodnych sygnału sterującego obiektem. Celem zdefiniowania takich wskaźników jakości było uzyskanie nie tylko odpowiedzi układu sterowania najbliższej zakładanej, ale także gwarantującej możliwe łagodne sterowanie obiektem, w tym przypadku piecem odlewniczym. Określenie parametrów układu sterowania dla takiego podejścia, uwzględniającego dwa kryteria jakościowe, stwarza możliwość zaprojektowania systemu nie tylko wystarczająco dobrze realizującego zadaną czasową funkcję zmiany temperatury, ale jednocześnie zapewniającego mniejszą liczbę dynamicznych zmian sygnału sterującego. Zbyt duża dynamika zmian wartości sygnału sterującego piecem stwarza bowiem ryzyko częstszych awarii elektronicznych układów regulacji, co ma istotne znaczenia eksploatacyjne. 133

, bez obecności zakłóceń.")


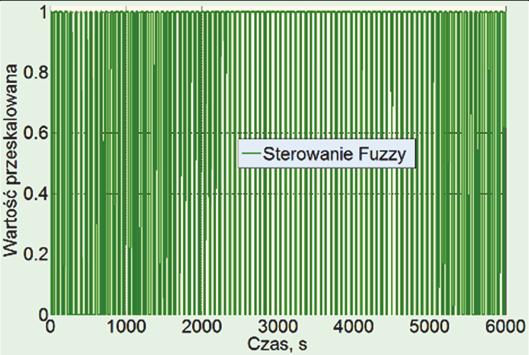
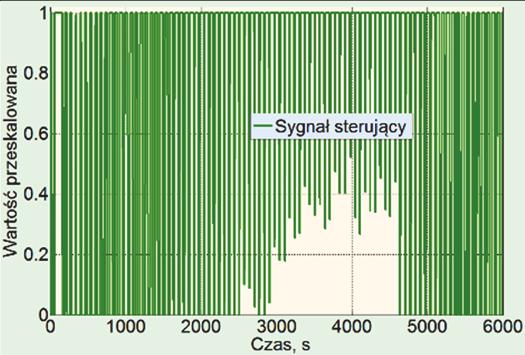
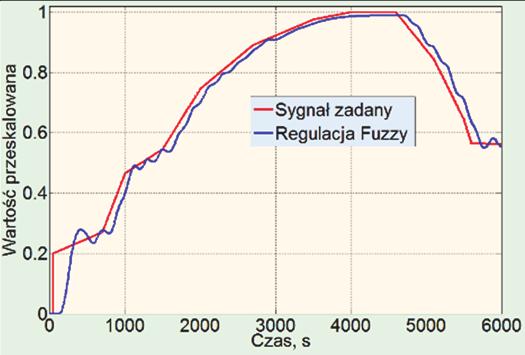
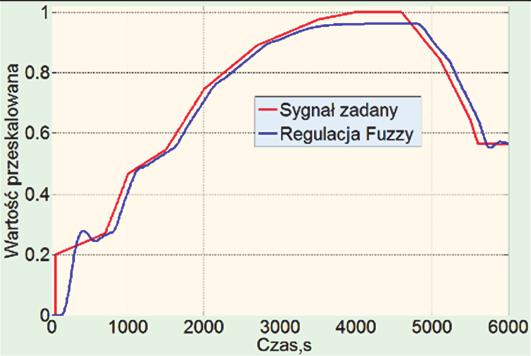
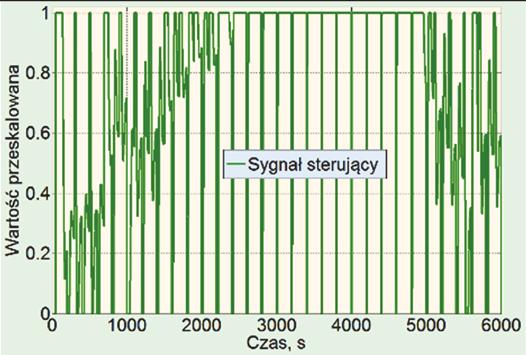
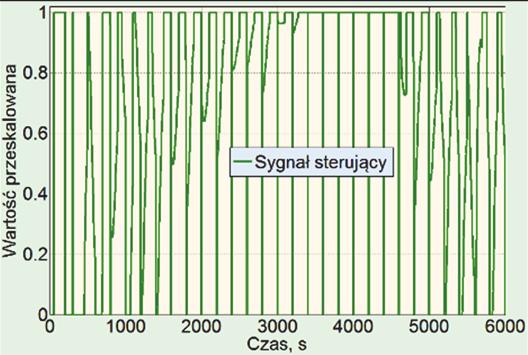
2 Rys. 1. Schemat układu sterowania piecem oporowym z regulatorem rozmytym i predyktorem Smitha 2. Wyniki symulacji Sygnał sterujący Wynik sterowania Na rysunku 2 przedstawiono znormalizowane wyniki odpowiedzi układu sterowania piecem oporowym, dla założonego kształtu funkcji zmian temperatury w komorze pieca, z zastosowaniem regulatora oraz regulatorów rozmytych opisanych 3 i 7 funkcjami przynależności (9 lub 49 reguł tworzących powierzchnię sterowania regulatora rozmytego), bez obecności zakłóceń. Pokazano także kształt sygnałów sterujących piecem. Rysunki 3 i 4 przedstawiają wyniki symulacji dla układu z zakłóceniem w postaci sygnału sinusoidalnego o dwóch częstotli wościach (0,005 i 0,015 Hz) i amplitudzie znormalizowanej równej 0,01. Na rysunkach 5 i 6 przedstawiono wyniki analogicznych symulacji dla amplitudy sygnału zakłócającego równej 0,05. W celu oceny wpływu kształtu sygnału zakłócającego na odpowiedź układu sterowania, wykonano symulacje dla prostokątnego kształtu zakłócenia, przy założeniu wartości amplitudy równej 0,01 (rys. 7 i 8) oraz 0,05 (rys. 9 i 10). Rys. 2. Wyniki sterowania i sygnału sterującego przy braku zakłócenia 134







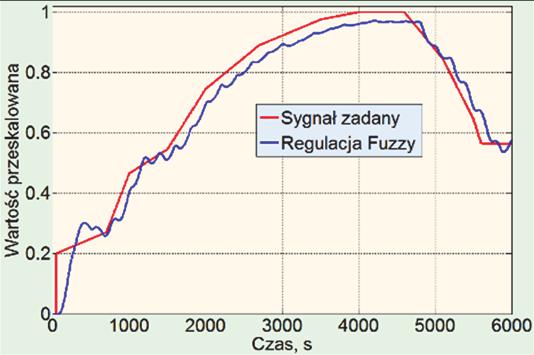
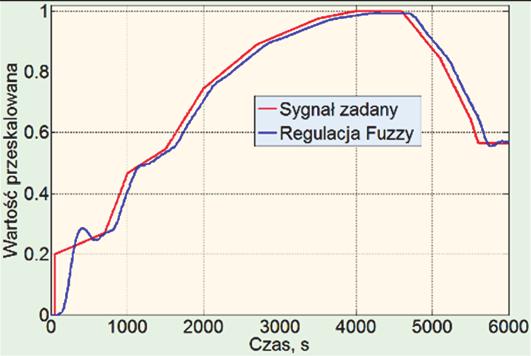
3 Rys. 3. Wynik sterowania dla regulatora i Fuzzy przy zakłóceniu sinusoidalnym o amplitudzie 0,01 Rys. 4. Wykres zmian sygnału sterującego dla regulatora i Fuzzy przy zakłóceniu sinusoidalnym o amplitudzie 0,01 Rys. 5. Wynik sterowania dla regulatora i Fuzzy przy zakłóceniu sinusoidalnym o amplitudzie 0,05 135


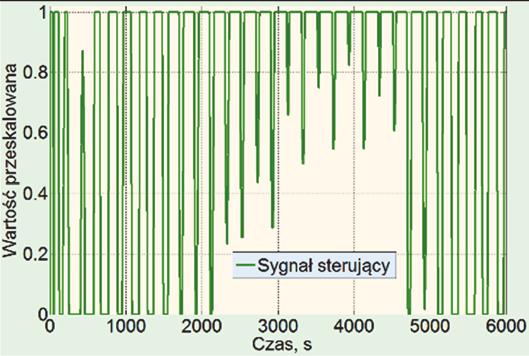
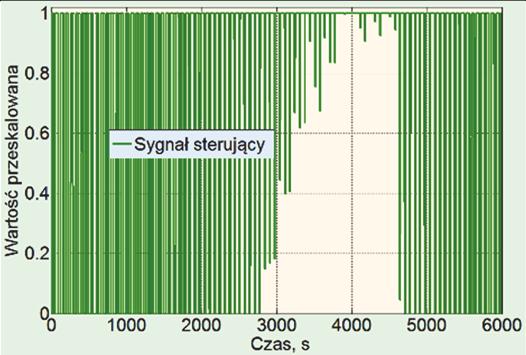





4 Rys. 6. Wykres zmian sygnału sterującego dla regulatora i Fuzzy przy zakłóceniu sinusoidalnym o amplitudzie 0,05 Rys. 7. Wynik sterowania dla regulatora i Fuzzy przy zakłóceniu prostokątnym o amplitudzie 0,01 Rys. 8. Wykres zmian sygnału sterującego dla regulatora i Fuzzy przy zakłóceniu prostokątnym o amplitudzie 0,01 136







5 Rys. 9. Wynik sterowania dla regulatora i Fuzzy przy zakłóceniu prostokątnym o amplitudzie 0,05 Rys. 10. Wykres zmian sygnału sterującego dla regulatora i Fuzzy przy zakłóceniu prostokątnym o amplitudzie 0,05 Analiza przebiegów funkcji pokazanych na rysunkach 2-10 pozwala na wstępną ocenę porównawczą jakości sterowania za pomocą zoptymalizowanego regulatora i dwóch przyjętych w układzie symulacji regulatorów rozmytych bez zakłóceń oraz w obecności sygnałów zakłócających o kształcie sinusoidalnym i prostokątnym dla dwóch przyjętych wartości amplitud oraz dwóch przyjętych wartości częstotliwości sygnałów zakłócających. Do precyzyjnej oceny można posłużyć się wartościami obliczonych wskaźników jakościowych, które zestawiono w tabeli 1. Z analizy informacji zawartych w tabeli 1 wynika, że najniższe wartości przyjętych wskaźników uzyskuje się w układzie sterowania bez obecności zakłóceń. Wprowadzenie zakłóceń do układu sterowania powoduje zwiększenie wartości wskaźników, a przez to większe odchylenia wartości wielkości wyjściowych od założonych. Błąd odpowiedzi układu ze zoptymalizowanym regulatorem był zawsze większy niż w przypadku stosowania regulatorów rozmytych. Zwiększenie częstotliwości sygnału zakłócającego powodowało zwiększoną wartość uzyskiwanych błędów odpowiedzi układu sterowania. Ten sam trend występował dla większych amplitud sygnałów zakłócających. Zmiana kształtu sygnału zakłócającego z sinusoidalnego na prostokątny także powodowała zwiększenie wartości wskaźników błędu odpowiedzi układu sterowania. Wartości wskaźników błędu sygnału sterującego nie podlegają tak jednoznacznemu trendowi zmian. W niektórych przypadkach kształt sygnału sterującego obiektem był mniej dynamiczny w przypadku zastosowania regulatora. Również zastosowanie regulatora rozmytego z 49 regułami nie zawsze dawało lepsze rezultaty w porównaniu do regulatora rozmytego z 9 regułami. Jednak w przypadkach, gdy regulator dawał lepsze rezultaty, wartości wskaźników błędu sygnału sterującego w regulatorach rozmytych były stosunkowo niewiele większe. Uzyskane wyniki symulacji porównawczych w układach sterowania odlewniczymi piecami oporowymi, charakteryzującymi się dużymi wartościami stałych czasowych (opóźnienie, dynamika zmian) z regulatorami rozmytymi o założonej strukturze, a przez to quasioptymalnymi, wskazują na celowość dalszych badań nad zastosowaniem tych regulatorów. 137
6 Tabela 1. Tabela wyników wskaźników jakości sterowania badanym obiektem za pomocą regulatorów i rozmytego (3 lub 7 funkcji przynależności) bez zakłóceń oraz dla sinusoidalnego i prostokątnego zakłócenia o wybranych amplitudach A i częstotliwościach f. Błąd sygnału sterującego Błąd odpowiedzi Zakłócenie Kształt A f [Hz] WJ1 WJ3 WJ2 WJ4 Sinus 0,01 0,005 35,2 30,7 35,4 181,7 159,9 161,1 0, ,6 116,8 141,1 232,3 159,3 173,8 0,05 0,005 46,9 57,1 60,5 324,2 242,3 267,1 0, ,5 217,5 242,2 488,7 458,5 370,4 Prostokąt 0,01 0,005 49,7 26,3 91,1 261,4 169,7 174,1 0, ,4 86,6 278,4 316,3 183,5 198,4 0,05 0,005 37,5 23,0 25,7 437,4 272,1 278,5 0, ,7 91,4 94,3 672,8 276,0 283,6 Brak zakłócenia 10,8 8,8 10,3 154,4 152,4 147,0 4. Wnioski Przeprowadzone badania symulacyjne pozwalają na ocenę zachowania regulatorów: i rozmytego, w obecności zakłóceń o różnych parametrach (kształt, amplituda, częstotliwość). Na podstawie dotychczas wykonanych serii symulacji porównawczych można stwierdzić, że quasioptymalny regulator rozmyty może dawać lepsze rezultaty regulacji od zoptymalizowanego regulatora, także w obecności zakłóceń o tych samych parametrach. Dowodzi to temu, że regulacja rozmyta jest bardziej odporna na zakłócenia. [3] Kacprzyk, J. (2001). Wieloetapowe sterowanie rozmyte. WNT, Warszawa. [4] The Math Works. Fuzzy Logic Toolbox. User s Guide. [5] Ziółkowski, E., Śmierciak, P. (2014). The optimization criteria in fuzzy control systems of foundry furnaces. Archives of Foundry Engineering, vol. 14, spec. iss. 2, pp (in Polish). [6] Śmierciak, P., Ziółkowski, E. (2014). Influence of selected parameters of interference on the quality of classical and fuzzy control resistance furnace. Archives of Foundry Engineering, vol. 14, spec. iss. 4, pp (in Polish). Literatura [1] Yager, R.R. & Filev, D.P. (1995). Podstawy modelowania i sterowania rozmytego. WNT, Warszawa. [2] Piegat, A. (1999). Modelowanie i sterowanie rozmyte. EXIT, Warszawa. The Simulation Results Comparison of Influence of Shape and Interference Amplitude on Control Quality of Resistance Furnace in a System Equipped with or Fuzzy Regulators The article presents the selected, interference parameters (form, amplitude and frequency) influencing the quality of automatic steering system with classical regulator, and optimally tuned fuzzy regulator with formed structure. Based on the presented results of simulation process of electrical resistance furnace, the evaluation of steering quality for adopted criteria has been made. The steering failure and the form of object s steering signal was evaluated. 138
Kryteria optymalizacji w systemach sterowania rozmytego piecami odlewniczymi
 A R C H I V E S of F O U N D R Y E N G I N E E R I N G Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 14 Special Issue 2/2014 95 100
A R C H I V E S of F O U N D R Y E N G I N E E R I N G Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 14 Special Issue 2/2014 95 100
CHARAKTERYSTYKA I ZASTOSOWANIA ALGORYTMÓW OPTYMALIZACJI ROZMYTEJ. E. ZIÓŁKOWSKI 1 Wydział Odlewnictwa AGH, ul. Reymonta 23, Kraków
 36/3 Archives of Foundry, Year 004, Volume 4, 3 Archiwum Odlewnictwa, Rok 004, Rocznik 4, Nr 3 PAN Katowice PL ISSN 64-5308 CHARAKTERYSTYKA I ZASTOSOWANIA ALGORYTMÓW OPTYMALIZACJI ROZMYTEJ E. ZIÓŁKOWSKI
36/3 Archives of Foundry, Year 004, Volume 4, 3 Archiwum Odlewnictwa, Rok 004, Rocznik 4, Nr 3 PAN Katowice PL ISSN 64-5308 CHARAKTERYSTYKA I ZASTOSOWANIA ALGORYTMÓW OPTYMALIZACJI ROZMYTEJ E. ZIÓŁKOWSKI
Sreszczenie. Słowa kluczowe: sterowanie, poziom cieczy, regulator rozmyty
 Ewa Wachowicz Katedra Systemów Sterowania Politechnika Koszalińska STEROWANIE POZIOMEM CIECZY W ZBIORNIKU Z WYKORZYSTANIEM REGULATORA ROZMYTEGO Sreszczenie W pracy omówiono układ regulacji poziomu cieczy,
Ewa Wachowicz Katedra Systemów Sterowania Politechnika Koszalińska STEROWANIE POZIOMEM CIECZY W ZBIORNIKU Z WYKORZYSTANIEM REGULATORA ROZMYTEGO Sreszczenie W pracy omówiono układ regulacji poziomu cieczy,
WPŁYW ADDYTYWNYCH ZAKŁÓCEŃ TYPU SINUSOIDALNEGO SYGNAŁÓW WEJŚCIOWYCH REGULATORÓW PI W UKŁADZIE FOC Z SILNIKIEM INDUKCYJNYM NA PRĘDKOŚĆ OBROTOWĄ
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 83 Electrical Engineering 2015 Wiktor HUDY* Kazimierz JARACZ* WPŁYW ADDYTYWNYCH ZAKŁÓCEŃ TYPU SINUSOIDALNEGO SYGNAŁÓW WEJŚCIOWYCH REGULATORÓW PI
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 83 Electrical Engineering 2015 Wiktor HUDY* Kazimierz JARACZ* WPŁYW ADDYTYWNYCH ZAKŁÓCEŃ TYPU SINUSOIDALNEGO SYGNAŁÓW WEJŚCIOWYCH REGULATORÓW PI
AUTO-STROJENIE REGULATORA TYPU PID Z WYKORZYSTANIEM LOGIKI ROZMYTEJ
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 75 Electrical Engineering 2013 Łukasz NIEWIARA* Krzysztof ZAWIRSKI* AUTO-STROJENIE REGULATORA TYPU PID Z WYKORZYSTANIEM LOGIKI ROZMYTEJ Zagadnienia
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 75 Electrical Engineering 2013 Łukasz NIEWIARA* Krzysztof ZAWIRSKI* AUTO-STROJENIE REGULATORA TYPU PID Z WYKORZYSTANIEM LOGIKI ROZMYTEJ Zagadnienia
REJESTRACJA WARTOŚCI CHWILOWYCH NAPIĘĆ I PRĄDÓW W UKŁADACH ZASILANIA WYBRANYCH MIESZAREK ODLEWNICZYCH
 WYDZIAŁ ODLEWNICTWA AGH ODDZIAŁ KRAKOWSKI STOP XXXIII KONFERENCJA NAUKOWA z okazji Ogólnopolskiego Dnia Odlewnika 2009 Kraków, 11 grudnia 2009 r. Eugeniusz ZIÓŁKOWSKI, Roman WRONA, Krzysztof SMYKSY, Marcin
WYDZIAŁ ODLEWNICTWA AGH ODDZIAŁ KRAKOWSKI STOP XXXIII KONFERENCJA NAUKOWA z okazji Ogólnopolskiego Dnia Odlewnika 2009 Kraków, 11 grudnia 2009 r. Eugeniusz ZIÓŁKOWSKI, Roman WRONA, Krzysztof SMYKSY, Marcin
WPŁYW OPÓŹNIENIA NA DYNAMIKĘ UKŁADÓW Z REGULACJĄ KLASYCZNĄ I ROZMYTĄ
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 65 Politechniki Wrocławskiej Nr 65 Studia i Materiały Nr 31 2011 Kinga GÓRNIAK* układy z opóźnieniem, regulacja rozmyta, model Mamdaniego,
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 65 Politechniki Wrocławskiej Nr 65 Studia i Materiały Nr 31 2011 Kinga GÓRNIAK* układy z opóźnieniem, regulacja rozmyta, model Mamdaniego,
Implementacja FFT w systemie monitorowania pracy napędu mieszarki krążnikowej
 A R C H I V E S of F O U N D R Y E N G I N E E R I N G Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (89-) Volume 4 Special Issue 4/24 42 28/4 Implementacja
A R C H I V E S of F O U N D R Y E N G I N E E R I N G Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (89-) Volume 4 Special Issue 4/24 42 28/4 Implementacja
Uniwersytet Zielonogórski Wydział Elektrotechniki, Informatyki i Telekomunikacji Instytut Sterowania i Systemów Informatycznych
 Uniwersytet Zielonogórski Wydział Elektrotechniki, Informatyki i Telekomunikacji Instytut Sterowania i Systemów Informatycznych ELEMENTY SZTUCZNEJ INTELIGENCJI Laboratorium nr 6 SYSTEMY ROZMYTE TYPU MAMDANIEGO
Uniwersytet Zielonogórski Wydział Elektrotechniki, Informatyki i Telekomunikacji Instytut Sterowania i Systemów Informatycznych ELEMENTY SZTUCZNEJ INTELIGENCJI Laboratorium nr 6 SYSTEMY ROZMYTE TYPU MAMDANIEGO
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
BADANIA SYMULACYJNE UKŁADU HYDRAULICZNEGO Z REGULATOREM ROZMYTYM O STRUKTURZE PI
 WOJCIECH CZYŻYCKI BADANIA SYMULACYJNE UKŁADU HYDRAULICZNEGO Z REGULATOREM ROZMYTYM O STRUKTURZE PI SIMULATIONS OF HYDRAULIC SYSTEM WITH FUZZY LOGIC CONTROLLER BASED ON PI STRUCTURE S t r e s z c z e n
WOJCIECH CZYŻYCKI BADANIA SYMULACYJNE UKŁADU HYDRAULICZNEGO Z REGULATOREM ROZMYTYM O STRUKTURZE PI SIMULATIONS OF HYDRAULIC SYSTEM WITH FUZZY LOGIC CONTROLLER BASED ON PI STRUCTURE S t r e s z c z e n
PROGRAMOWANIE DYNAMICZNE W ROZMYTYM OTOCZENIU DO STEROWANIA STATKIEM
 Mostefa Mohamed-Seghir Akademia Morska w Gdyni PROGRAMOWANIE DYNAMICZNE W ROZMYTYM OTOCZENIU DO STEROWANIA STATKIEM W artykule przedstawiono propozycję zastosowania programowania dynamicznego do rozwiązywania
Mostefa Mohamed-Seghir Akademia Morska w Gdyni PROGRAMOWANIE DYNAMICZNE W ROZMYTYM OTOCZENIU DO STEROWANIA STATKIEM W artykule przedstawiono propozycję zastosowania programowania dynamicznego do rozwiązywania
MODELOWANIE WSPÓŁZALEŻNOŚCI PARAMETRÓW FAZY KOŃCOWEJ DOJU MASZYNOWEGO KRÓW
 Problemy Inżynierii Rolniczej nr 4/2007 Henryk Juszka, Stanisław Lis, Marcin Tomasik, Piotr Jezierski Katedra Energetyki Rolniczej Akademia Rolnicza w Krakowie MODELOWANIE WSPÓŁZALEŻNOŚCI PARAMETRÓW FAZY
Problemy Inżynierii Rolniczej nr 4/2007 Henryk Juszka, Stanisław Lis, Marcin Tomasik, Piotr Jezierski Katedra Energetyki Rolniczej Akademia Rolnicza w Krakowie MODELOWANIE WSPÓŁZALEŻNOŚCI PARAMETRÓW FAZY
CHARAKTERYSTYKA STEROWANIA GRUPOWEGO W ZASILANIU ELEKTRYCZNYCH PIECÓW OPOROWYCH
 20/3 Archives of Foundry, Year 2002, Volume 2, 3 Archiwum Odlewnictwa, Rok 2002, Rocznik 2, Nr 3 PAN Katowice PL ISSN 1642-5308 CHARAKTERYSTYKA STEROWANIA GRUPOWEGO W ZASILANIU ELEKTRYCZNYCH PIECÓW OPOROWYCH
20/3 Archives of Foundry, Year 2002, Volume 2, 3 Archiwum Odlewnictwa, Rok 2002, Rocznik 2, Nr 3 PAN Katowice PL ISSN 1642-5308 CHARAKTERYSTYKA STEROWANIA GRUPOWEGO W ZASILANIU ELEKTRYCZNYCH PIECÓW OPOROWYCH
Logika rozmyta typu 2
 Logika rozmyta typu 2 Zbiory rozmyte Funkcja przynależności Interwałowe zbiory rozmyte Funkcje przynależności przedziałów Zastosowanie.9.5 Francuz Polak Niemiec Arytmetyka przedziałów Operacje zbiorowe
Logika rozmyta typu 2 Zbiory rozmyte Funkcja przynależności Interwałowe zbiory rozmyte Funkcje przynależności przedziałów Zastosowanie.9.5 Francuz Polak Niemiec Arytmetyka przedziałów Operacje zbiorowe
ZASTOSOWANIE SYSTEMU REGULATORA ROZMYTEGO W DOZOWANIU HELU, AZOTU I TLENU W RAMACH MIESZANKI BESTMIX
 WOJCIECH Z. CHMIELOWSKI, KINGA SORKOWSKA ZASTOSOWANIE SYSTEMU REGULATORA ROZMYTEGO W DOZOWANIU HELU, AZOTU I TLENU W RAMACH MIESZANKI BESTMIX APPLICATION OF FUZZY REGULATOR TO DOSING OF HELIUM, NITROGEN
WOJCIECH Z. CHMIELOWSKI, KINGA SORKOWSKA ZASTOSOWANIE SYSTEMU REGULATORA ROZMYTEGO W DOZOWANIU HELU, AZOTU I TLENU W RAMACH MIESZANKI BESTMIX APPLICATION OF FUZZY REGULATOR TO DOSING OF HELIUM, NITROGEN
Regulacja adaptacyjna w anemometrze stałotemperaturowym
 3 Prace Instytutu Mechaniki Górotworu PAN Tom 8, nr 1-4, (2006), s. 3-7 Instytut Mechaniki Górotworu PAN Regulacja adaptacyjna w anemometrze stałotemperaturowym PAWEŁ LIGĘZA Instytut Mechaniki Górotworu
3 Prace Instytutu Mechaniki Górotworu PAN Tom 8, nr 1-4, (2006), s. 3-7 Instytut Mechaniki Górotworu PAN Regulacja adaptacyjna w anemometrze stałotemperaturowym PAWEŁ LIGĘZA Instytut Mechaniki Górotworu
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
CHARAKTERYSTYKA WYBRANYCH SYSTEMÓW POMIARU PARAMETRÓW SIECI ELEKTRYCZNYCH W ASPEKCIE OCENY ENERGOCHŁONNOŚCI MASZYN I URZĄDZEŃ ODLEWNICZYCH
 POMIARU PARAMETRÓW SIECI ELEKTRYCZNYCH W ASPEKCIE OCENY ENERGOCHŁONNOŚCI MASZYN I Krzysztof SMYKSY 1 Roman WRONA 2 Eugeniusz ZIÓŁKOWSKI 3 Wprowadzenie Zagadnieniom energochłonności maszyn i urządzeń odlewniczych
POMIARU PARAMETRÓW SIECI ELEKTRYCZNYCH W ASPEKCIE OCENY ENERGOCHŁONNOŚCI MASZYN I Krzysztof SMYKSY 1 Roman WRONA 2 Eugeniusz ZIÓŁKOWSKI 3 Wprowadzenie Zagadnieniom energochłonności maszyn i urządzeń odlewniczych
SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD I PSPICE
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Piotr FRĄCZAK* SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Piotr FRĄCZAK* SYMULACJA ZAKŁÓCEŃ W UKŁADACH AUTOMATYKI UTWORZONYCH ZA POMOCĄ OBWODÓW ELEKTRYCZNYCH W PROGRAMACH MATHCAD
ZASTOSOWANIE PROGRAMU MATLAB W MODELOWANIU PODCIŚNIENIA W APARACIE UDOJOWYM
 Inżynieria Rolnicza 9(118)/2009 ZASTOSOWANIE PROGRAMU MATLAB W MODELOWANIU PODCIŚNIENIA W APARACIE UDOJOWYM Katedra Energetyki Rolniczej, Uniwersytet Rolniczy w Krakowie Streszczenie. Przedstawiono metodykę
Inżynieria Rolnicza 9(118)/2009 ZASTOSOWANIE PROGRAMU MATLAB W MODELOWANIU PODCIŚNIENIA W APARACIE UDOJOWYM Katedra Energetyki Rolniczej, Uniwersytet Rolniczy w Krakowie Streszczenie. Przedstawiono metodykę
ODWZOROWANIE PRZEBIEGU PULSACJI METODAMI SZTUCZNEJ INTELIGENCJI
 Inżynieria Rolnicza 9(107)/2008 ODWZOROWANIE PRZEBIEGU PULSACJI METODAMI SZTUCZNEJ INTELIGENCJI Katedra Energetyki Rolniczej, Uniwersytet Rolniczy w Krakowie Streszczenie. Przedstawiono metodykę odwzorowania
Inżynieria Rolnicza 9(107)/2008 ODWZOROWANIE PRZEBIEGU PULSACJI METODAMI SZTUCZNEJ INTELIGENCJI Katedra Energetyki Rolniczej, Uniwersytet Rolniczy w Krakowie Streszczenie. Przedstawiono metodykę odwzorowania
WYDZIAŁ ELEKTRYCZNY KATEDRA AUTOMATYKI I ELEKTRONIKI. Badanie układu regulacji dwustawnej
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
Proces wykonywania modeli z nowej generacji mas modelowych stosowanych w metodzie wytapianych modeli analiza symulacyjna
 A R C H I V E S of F O U N D R Y E N G I N E E R I N G Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-331) Volume 12 Special Issue 2/212 1 14 2/2
A R C H I V E S of F O U N D R Y E N G I N E E R I N G Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-331) Volume 12 Special Issue 2/212 1 14 2/2
BLOK FUNKCYJNY FUZZY LOGIC W STEROWANIU PLC AUTONOMICZNYM APARATEM UDOJOWYM*
 Inżynieria Rolnicza 8(133)/2011 BLOK FUNKCYJNY FUZZY LOGIC W STEROWANIU PLC AUTONOMICZNYM APARATEM UDOJOWYM* Marcin Tomasik, Henryk Juszka, Stanisław Lis Katedra Energetyki i Automatyzacji Procesów Rolniczych,
Inżynieria Rolnicza 8(133)/2011 BLOK FUNKCYJNY FUZZY LOGIC W STEROWANIU PLC AUTONOMICZNYM APARATEM UDOJOWYM* Marcin Tomasik, Henryk Juszka, Stanisław Lis Katedra Energetyki i Automatyzacji Procesów Rolniczych,
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
WPŁYW SZYBKOŚCI STYGNIĘCIA NA WŁASNOŚCI TERMOFIZYCZNE STALIWA W STANIE STAŁYM
 2/1 Archives of Foundry, Year 200, Volume, 1 Archiwum Odlewnictwa, Rok 200, Rocznik, Nr 1 PAN Katowice PL ISSN 1642-308 WPŁYW SZYBKOŚCI STYGNIĘCIA NA WŁASNOŚCI TERMOFIZYCZNE STALIWA W STANIE STAŁYM D.
2/1 Archives of Foundry, Year 200, Volume, 1 Archiwum Odlewnictwa, Rok 200, Rocznik, Nr 1 PAN Katowice PL ISSN 1642-308 WPŁYW SZYBKOŚCI STYGNIĘCIA NA WŁASNOŚCI TERMOFIZYCZNE STALIWA W STANIE STAŁYM D.
RECENZJA. rozprawy doktorskiej Pana mgra inż. Pawła Śmierciaka
 Mirosław Cholewa Gliwice 22.09.2017 r. prof. dr hab. Inż. Katedra Odlewnictwa Wydział Mechaniczny Technologiczny Politechnika Śląska RECENZJA rozprawy doktorskiej Pana mgra inż. Pawła Śmierciaka Doktoranta
Mirosław Cholewa Gliwice 22.09.2017 r. prof. dr hab. Inż. Katedra Odlewnictwa Wydział Mechaniczny Technologiczny Politechnika Śląska RECENZJA rozprawy doktorskiej Pana mgra inż. Pawła Śmierciaka Doktoranta
Temat: Projektowanie sterownika rozmytego. Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE
 Temat: Projektowanie sterownika rozmytego Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie Sterowanie
Temat: Projektowanie sterownika rozmytego Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie Sterowanie
Badanie wpływu zakłóceń sygnałów wejściowych regulatorów typu PI w układzie sterowania polowo-zorientowanego z silnikiem indukcyjnym
 dr inż. WIKTOR HUDY dr hab. inż. KAZIMIERZ JARACZ Uniwersytet Pedagogiczny im. KEN w Krakowie Badanie wpływu zakłóceń sygnałów wejściowych regulatorów typu PI w układzie sterowania polowo-zorientowanego
dr inż. WIKTOR HUDY dr hab. inż. KAZIMIERZ JARACZ Uniwersytet Pedagogiczny im. KEN w Krakowie Badanie wpływu zakłóceń sygnałów wejściowych regulatorów typu PI w układzie sterowania polowo-zorientowanego
1. Opis teoretyczny regulatora i obiektu z opóźnieniem.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie:. Opis teoretyczny regulatora i obiektu z opóźnieniem. W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie i wyłączenie...
MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO STEROWANEGO ŹRÓDŁA PRĄDOWEGO PRĄDU STAŁEGO BAZUJĄCEGO NA STRUKTURZE BUCK-BOOST CZĘŚĆ 2
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 87 Electrical Engineering 2016 Michał KRYSTKOWIAK* Dominik MATECKI* MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO STEROWANEGO ŹRÓDŁA PRĄDOWEGO PRĄDU STAŁEGO
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 87 Electrical Engineering 2016 Michał KRYSTKOWIAK* Dominik MATECKI* MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO STEROWANEGO ŹRÓDŁA PRĄDOWEGO PRĄDU STAŁEGO
MODELOWANIE I SYMULACJA FUNKCJONOWANIA REGULACJI NA STANOWISKU MULTI TANK
 Inżynieria Rolnicza 10(108)/2008 MODELOWANIE I SYMULACJA FUNKCJONOWANIA REGULACJI NA STANOWISKU MULTI TANK Henryk Juszka, Marcin Tomasik, Stanisław Lis Katedra Energetyki Rolniczej, Uniwersytet Rolniczy
Inżynieria Rolnicza 10(108)/2008 MODELOWANIE I SYMULACJA FUNKCJONOWANIA REGULACJI NA STANOWISKU MULTI TANK Henryk Juszka, Marcin Tomasik, Stanisław Lis Katedra Energetyki Rolniczej, Uniwersytet Rolniczy
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
OPTYMALIZACJA STEROWANIA MIKROKLIMATEM W PIECZARKARNI
 Inżynieria Rolnicza 6(131)/2011 OPTYMALIZACJA STEROWANIA MIKROKLIMATEM W PIECZARKARNI Leonard Woroncow, Ewa Wachowicz Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy przedstawiono wyniki
Inżynieria Rolnicza 6(131)/2011 OPTYMALIZACJA STEROWANIA MIKROKLIMATEM W PIECZARKARNI Leonard Woroncow, Ewa Wachowicz Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy przedstawiono wyniki
STEROWANIE CIŚNIENIEM BEZWZGLĘDNYM W APARACIE UDOJOWYM DLA KRÓW
 Inżynieria Rolnicza 7(95)/2007 STEROWANIE CIŚNIENIEM BEZWZGLĘDNYM W APARACIE UDOJOWYM DLA KRÓW Henryk Juszka, Stanisław Lis, Marcin Tomasik Katedra Energetyki Rolniczej, Akademia Rolnicza w Krakowie Streszczenie.
Inżynieria Rolnicza 7(95)/2007 STEROWANIE CIŚNIENIEM BEZWZGLĘDNYM W APARACIE UDOJOWYM DLA KRÓW Henryk Juszka, Stanisław Lis, Marcin Tomasik Katedra Energetyki Rolniczej, Akademia Rolnicza w Krakowie Streszczenie.
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
WYKORZYSTANIE MODELI AUTOREGRESJI DO PROGNOZOWANIA SZEREGU CZASOWEGO ZWIĄZANEGO ZE SPRZEDAŻĄ ASORTYMENTU HUTNICZEGO
 5/18 ARCHIWUM ODLEWNICTWA Rok 2006, Rocznik 6, Nr 18 (1/2) ARCHIVES OF FOUNDRY Year 2006, Volume 6, N o 18 (1/2) PAN Katowice PL ISSN 1642-5308 WYKORZYSTANIE MODELI AUTOREGRESJI DO PROGNOZOWANIA SZEREGU
5/18 ARCHIWUM ODLEWNICTWA Rok 2006, Rocznik 6, Nr 18 (1/2) ARCHIVES OF FOUNDRY Year 2006, Volume 6, N o 18 (1/2) PAN Katowice PL ISSN 1642-5308 WYKORZYSTANIE MODELI AUTOREGRESJI DO PROGNOZOWANIA SZEREGU
ZASTOSOWANIE REGULATORÓW ROZMYTYCH W ŚLEDZENIU WEKTORA TRAJEKTORII STANÓW WIELOZBIORNIKOWEGO SYSTEMU WODNOGOSPODARCZEGO (CZĘŚĆ II.
 WOJCIECH Z. CHMIELOWSKI ZASTOSOWANIE REGULATORÓW ROZMYTYCH W ŚLEDZENIU WEKTORA TRAJEKTORII STANÓW WIELOZBIORNIKOWEGO SYSTEMU WODNOGOSPODARCZEGO (CZĘŚĆ II. UKŁAD STERUJĄCY) APPLICATION OF FUZZY REGULATORS
WOJCIECH Z. CHMIELOWSKI ZASTOSOWANIE REGULATORÓW ROZMYTYCH W ŚLEDZENIU WEKTORA TRAJEKTORII STANÓW WIELOZBIORNIKOWEGO SYSTEMU WODNOGOSPODARCZEGO (CZĘŚĆ II. UKŁAD STERUJĄCY) APPLICATION OF FUZZY REGULATORS
ROZMYTY REGULATOR PRĘDKOŚCI OBROTOWEJ ODPORNY NA ZMIANY BEZWŁADNOŚCI
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 80 Electrical Engineering 2014 Michał JAKUBOWSKI* Krystian NOWAKOWSKI* Krzysztof ZAWIRSKI* ROZMYTY REGULATOR PRĘDKOŚCI OBROTOWEJ ODPORNY NA ZMIANY
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 80 Electrical Engineering 2014 Michał JAKUBOWSKI* Krystian NOWAKOWSKI* Krzysztof ZAWIRSKI* ROZMYTY REGULATOR PRĘDKOŚCI OBROTOWEJ ODPORNY NA ZMIANY
OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA
 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2008 Seria: TRANSPORT z. 64 Nr kol. 1803 Rafał SROKA OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA Streszczenie. W
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2008 Seria: TRANSPORT z. 64 Nr kol. 1803 Rafał SROKA OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA Streszczenie. W
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
APLIKACJA ZBIORÓW ROZMYTYCH DLA NOWOCZESNYCH TECHNIK DOJU KRÓW*
 Inżynieria Rolnicza 6(3)/20 APLIKACJA ZBIORÓW ROZMYTYCH DLA NOWOCZESNYCH TECHNIK DOJU KRÓW* Stanisław Lis, Henryk Juszka, Marcin Tomasik Katedra Energetyki i Automatyzacji Procesów Rolniczych, Uniwersytet
Inżynieria Rolnicza 6(3)/20 APLIKACJA ZBIORÓW ROZMYTYCH DLA NOWOCZESNYCH TECHNIK DOJU KRÓW* Stanisław Lis, Henryk Juszka, Marcin Tomasik Katedra Energetyki i Automatyzacji Procesów Rolniczych, Uniwersytet
OPRACOWANIE ZAŁOŻEŃ I REALIZACJA LABORATORYJNEGO SYMULATORA DO BADANIA MODUŁU PODPOWIEDZI
 IEN 2013 wszelkie prawa zastrzeżone www.ien.gda.pl e-mail: ien@ien.gda.pl OPRACOWANIE ZAŁOŻEŃ I REALIZACJA LABORATORYJNEGO SYMULATORA DO BADANIA MODUŁU PODPOWIEDZI (SYSTEMU EKSPERTOWEGO) SYSTEMÓW OBSZAROWEJ
IEN 2013 wszelkie prawa zastrzeżone www.ien.gda.pl e-mail: ien@ien.gda.pl OPRACOWANIE ZAŁOŻEŃ I REALIZACJA LABORATORYJNEGO SYMULATORA DO BADANIA MODUŁU PODPOWIEDZI (SYSTEMU EKSPERTOWEGO) SYSTEMÓW OBSZAROWEJ
ALGORYTM PROJEKTOWANIA ROZMYTYCH SYSTEMÓW EKSPERCKICH TYPU MAMDANI ZADEH OCENIAJĄCYCH EFEKTYWNOŚĆ WYKONANIA ZADANIA BOJOWEGO
 Szybkobieżne Pojazdy Gąsienicowe (2) Nr 2, 24 Mirosław ADAMSKI Norbert GRZESIK ALGORYTM PROJEKTOWANIA CH SYSTEMÓW EKSPERCKICH TYPU MAMDANI ZADEH OCENIAJĄCYCH EFEKTYWNOŚĆ WYKONANIA ZADANIA BOJOWEGO. WSTĘP
Szybkobieżne Pojazdy Gąsienicowe (2) Nr 2, 24 Mirosław ADAMSKI Norbert GRZESIK ALGORYTM PROJEKTOWANIA CH SYSTEMÓW EKSPERCKICH TYPU MAMDANI ZADEH OCENIAJĄCYCH EFEKTYWNOŚĆ WYKONANIA ZADANIA BOJOWEGO. WSTĘP
MODEL SYMULACYJNY JEDNOFAZOWEGO PROSTOWNIKA DIODOWEGO Z MODULATOREM PRĄDU
 POZNAN UNIVERSITY OF TECHNOLOGY ACADEMIC JOURNALS No 99 Electrical Engineering 2019 DOI 10.21008/j.1897-0737.2019.99.0006 Łukasz CIEPLIŃSKI *, Michał KRYSTKOWIAK *, Michał GWÓŹDŹ * MODEL SYMULACYJNY JEDNOFAZOWEGO
POZNAN UNIVERSITY OF TECHNOLOGY ACADEMIC JOURNALS No 99 Electrical Engineering 2019 DOI 10.21008/j.1897-0737.2019.99.0006 Łukasz CIEPLIŃSKI *, Michał KRYSTKOWIAK *, Michał GWÓŹDŹ * MODEL SYMULACYJNY JEDNOFAZOWEGO
BADANIA WYBRANYCH CZUJNIKÓW TEMPERATURY WSPÓŁPRACUJĄCYCH Z KARTAMI POMIAROWYMI W LabVIEW
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 63 Politechniki Wrocławskiej Nr 63 Studia i Materiały Nr 29 2009 Krzysztof PODLEJSKI* czujniki temperatury, LabVIEW BADANIA WYBRANYCH
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 63 Politechniki Wrocławskiej Nr 63 Studia i Materiały Nr 29 2009 Krzysztof PODLEJSKI* czujniki temperatury, LabVIEW BADANIA WYBRANYCH
ZARZĄDZANIE PRODUKCJĄ ODLEWÓW W OPARCIU O TECHNIKĘ MODELOWANIA I SYMULACJI PRACY LINII ODLEWNICZYCH
 ARCHIWUM ODLEWNICTWA 19/17 Rok 2005, Rocznik 5, Nr 17 Archives of Foundry Year 2005, Volume 5, Book 17 PAN - Katowice PL ISSN 1642-5308 ZARZĄDZANIE PRODUKCJĄ ODLEWÓW W OPARCIU O TECHNIKĘ MODELOWANIA I
ARCHIWUM ODLEWNICTWA 19/17 Rok 2005, Rocznik 5, Nr 17 Archives of Foundry Year 2005, Volume 5, Book 17 PAN - Katowice PL ISSN 1642-5308 ZARZĄDZANIE PRODUKCJĄ ODLEWÓW W OPARCIU O TECHNIKĘ MODELOWANIA I
PRZESTRZENNY MODEL PRZENOŚNIKA TAŚMOWEGO MASY FORMIERSKIEJ
 53/17 ARCHIWUM ODLEWNICTWA Rok 2005, Rocznik 5, Nr 17 Archives of Foundry Year 2005, Volume 5, Book 17 PAN - Katowice PL ISSN 1642-5308 PRZESTRZENNY MODEL PRZENOŚNIKA TAŚMOWEGO MASY FORMIERSKIEJ J. STRZAŁKO
53/17 ARCHIWUM ODLEWNICTWA Rok 2005, Rocznik 5, Nr 17 Archives of Foundry Year 2005, Volume 5, Book 17 PAN - Katowice PL ISSN 1642-5308 PRZESTRZENNY MODEL PRZENOŚNIKA TAŚMOWEGO MASY FORMIERSKIEJ J. STRZAŁKO
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
BADANIA ZRÓŻNICOWANIA RYZYKA WYPADKÓW PRZY PRACY NA PRZYKŁADZIE ANALIZY STATYSTYKI WYPADKÓW DLA BRANŻY GÓRNICTWA I POLSKI
 14 BADANIA ZRÓŻNICOWANIA RYZYKA WYPADKÓW PRZY PRACY NA PRZYKŁADZIE ANALIZY STATYSTYKI WYPADKÓW DLA BRANŻY GÓRNICTWA I POLSKI 14.1 WSTĘP Ogólne wymagania prawne dotyczące przy pracy określają m.in. przepisy
14 BADANIA ZRÓŻNICOWANIA RYZYKA WYPADKÓW PRZY PRACY NA PRZYKŁADZIE ANALIZY STATYSTYKI WYPADKÓW DLA BRANŻY GÓRNICTWA I POLSKI 14.1 WSTĘP Ogólne wymagania prawne dotyczące przy pracy określają m.in. przepisy
ANALIZA WPŁYWU WYBRANYCH PARAMETRÓW SYGNAŁU WYMUSZAJĄCEGO NA CZAS ODPOWIEDZI OBIEKTU
 II Konferencja Naukowa KNWS'05 "Informatyka- sztuka czy rzemios o" 15-18 czerwca 2005, Z otniki Luba skie ANALIZA WPŁYWU WYBRANYCH PARAMETRÓW SYGNAŁU WYMUSZAJĄCEGO NA CZAS ODPOWIEDZI OBIEKTU Piotr Mróz
II Konferencja Naukowa KNWS'05 "Informatyka- sztuka czy rzemios o" 15-18 czerwca 2005, Z otniki Luba skie ANALIZA WPŁYWU WYBRANYCH PARAMETRÓW SYGNAŁU WYMUSZAJĄCEGO NA CZAS ODPOWIEDZI OBIEKTU Piotr Mróz
ZASTOSOWANIE ZBIORÓW ROZMYTYCH W OCENIE OSIĄGNIĘCIA EFEKTÓW KSZTAŁCENIA
 IZABELA JÓZEFCZYK ROMUALD MAŁECKI ROMAN RUMIANOWSKI Politechnika Warszawska, Filia Płock ZASTOSOWANIE ZBIORÓW ROZMYTYCH W OCENIE OSIĄGNIĘCIA EFEKTÓW KSZTAŁCENIA Streszczenie. Praca przedstawia propozycję
IZABELA JÓZEFCZYK ROMUALD MAŁECKI ROMAN RUMIANOWSKI Politechnika Warszawska, Filia Płock ZASTOSOWANIE ZBIORÓW ROZMYTYCH W OCENIE OSIĄGNIĘCIA EFEKTÓW KSZTAŁCENIA Streszczenie. Praca przedstawia propozycję
Imię i nazwisko (e mail): Rok: 2018/2019 Grupa: Ćw. 5: Pomiar parametrów sygnałów napięciowych Zaliczenie: Podpis prowadzącego: Uwagi:
: Rok: 2018/2019 Grupa: Ćw. 5: Pomiar parametrów sygnałów napięciowych Zaliczenie: Podpis prowadzącego: Uwagi:") Wydział: EAIiIB Imię i nazwisko (e mail): Rok: 2018/2019 Grupa: Zespół: Data wykonania: LABORATORIUM METROLOGII Ćw. 5: Pomiar parametrów sygnałów napięciowych Zaliczenie: Podpis prowadzącego: Uwagi: Wstęp
Wydział: EAIiIB Imię i nazwisko (e mail): Rok: 2018/2019 Grupa: Zespół: Data wykonania: LABORATORIUM METROLOGII Ćw. 5: Pomiar parametrów sygnałów napięciowych Zaliczenie: Podpis prowadzącego: Uwagi: Wstęp
Analiza właściwości filtrów dolnoprzepustowych
 Ćwiczenie Analiza właściwości filtrów dolnoprzepustowych Program ćwiczenia. Zapoznanie się z przykładową strukturą filtra dolnoprzepustowego (DP) rzędu i jego parametrami.. Analiza widma sygnału prostokątnego.
Ćwiczenie Analiza właściwości filtrów dolnoprzepustowych Program ćwiczenia. Zapoznanie się z przykładową strukturą filtra dolnoprzepustowego (DP) rzędu i jego parametrami.. Analiza widma sygnału prostokątnego.
POMIAR WILGOTNOŚCI MATERIAŁÓW SYPKICH METODĄ IMPULSOWĄ
 160/18 ARCHIWUM ODLEWNICTWA Rok 2006, Rocznik 6, Nr 18 (2/2) ARCHIVES OF FOUNDRY Year 2006, Volume 6, N o 18 (2/2) PAN Katowice PL ISSN 1642-5308 POMIAR WILGOTNOŚCI MATERIAŁÓW SYPKICH METODĄ IMPULSOWĄ
160/18 ARCHIWUM ODLEWNICTWA Rok 2006, Rocznik 6, Nr 18 (2/2) ARCHIVES OF FOUNDRY Year 2006, Volume 6, N o 18 (2/2) PAN Katowice PL ISSN 1642-5308 POMIAR WILGOTNOŚCI MATERIAŁÓW SYPKICH METODĄ IMPULSOWĄ
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Inteligencja obliczeniowa
 Ćwiczenie nr 3 Zbiory rozmyte logika rozmyta Sterowniki wielowejściowe i wielowyjściowe, relacje rozmyte, sposoby zapisu reguł, aproksymacja funkcji przy użyciu reguł rozmytych, charakterystyki przejściowe
Ćwiczenie nr 3 Zbiory rozmyte logika rozmyta Sterowniki wielowejściowe i wielowyjściowe, relacje rozmyte, sposoby zapisu reguł, aproksymacja funkcji przy użyciu reguł rozmytych, charakterystyki przejściowe
TRANSFORMATA FALKOWA WYBRANYCH SYGNAŁÓW SYMULACYJNYCH
 1-2013 PROBLEMY EKSPLOATACJI 27 Izabela JÓZEFCZYK, Romuald MAŁECKI Politechnika Warszawska, Płock TRANSFORMATA FALKOWA WYBRANYCH SYGNAŁÓW SYMULACYJNYCH Słowa kluczowe Sygnał, dyskretna transformacja falkowa,
1-2013 PROBLEMY EKSPLOATACJI 27 Izabela JÓZEFCZYK, Romuald MAŁECKI Politechnika Warszawska, Płock TRANSFORMATA FALKOWA WYBRANYCH SYGNAŁÓW SYMULACYJNYCH Słowa kluczowe Sygnał, dyskretna transformacja falkowa,
STRUKTURA ŻELIWA EN-GJS W ZALEŻNOŚCI OD MATERIAŁÓW WSADOWYCH
 3/22 Archives of Foundry, Year 2006, Volume 6, 22 Archiwum Odlewnictwa, Rok 2006, Rocznik 6, Nr 22 PAN Katowice PL ISSN 1642-5308 STRUKTURA ŻELIWA EN-GJS-500-7 W ZALEŻNOŚCI OD MATERIAŁÓW WSADOWYCH D. BARTOCHA
3/22 Archives of Foundry, Year 2006, Volume 6, 22 Archiwum Odlewnictwa, Rok 2006, Rocznik 6, Nr 22 PAN Katowice PL ISSN 1642-5308 STRUKTURA ŻELIWA EN-GJS-500-7 W ZALEŻNOŚCI OD MATERIAŁÓW WSADOWYCH D. BARTOCHA
OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG
 Leon KUKIEŁKA, Krzysztof KUKIEŁKA, Katarzyna GELETA, Łukasz CĄKAŁA OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG Streszczenie Praca dotyczy optymalizacji kształtu zbiornika toroidalnego na gaz LPG. Kryterium
Leon KUKIEŁKA, Krzysztof KUKIEŁKA, Katarzyna GELETA, Łukasz CĄKAŁA OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG Streszczenie Praca dotyczy optymalizacji kształtu zbiornika toroidalnego na gaz LPG. Kryterium
Implementacja rozmytych systemów wnioskujących w zdaniach regulacji
 Metody Sztucznej Inteligencji w Sterowaniu Ćwiczenie 5 Implementacja rozmytych systemów wnioskujących w zdaniach regulacji Przygotował: mgr inż. Marcin Pelic Instytut Technologii Mechanicznej Politechnika
Metody Sztucznej Inteligencji w Sterowaniu Ćwiczenie 5 Implementacja rozmytych systemów wnioskujących w zdaniach regulacji Przygotował: mgr inż. Marcin Pelic Instytut Technologii Mechanicznej Politechnika
UWAGA 2. Wszystkie wyniki zapisywać na dysku Dane E: (dotyczy symulacji i pomiarów rzeczywistych)
") Cel ćwiczenia: Zapoznanie się z budową i zasadą działania regulatorów ciągłych oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z budową i zasadą działania regulatorów ciągłych oraz ocena jakości regulacji ciągłej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
UWAGA. Wszystkie wyniki zapisywać na dysku Dane E: Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
PRZEŁĄCZANIE DIOD I TRANZYSTORÓW
 L A B O R A T O R I U M ELEMENTY ELEKTRONICZNE PRZEŁĄCZANIE DIOD I TRANZYSTORÓW REV. 1.1 1. CEL ĆWICZENIA - obserwacja pracy diod i tranzystorów podczas przełączania, - pomiary charakterystycznych czasów
L A B O R A T O R I U M ELEMENTY ELEKTRONICZNE PRZEŁĄCZANIE DIOD I TRANZYSTORÓW REV. 1.1 1. CEL ĆWICZENIA - obserwacja pracy diod i tranzystorów podczas przełączania, - pomiary charakterystycznych czasów
Wpływ nieliniowości elementów układu pomiarowego na błąd pomiaru impedancji
 Wpływ nieliniowości elementów układu pomiarowego na błąd pomiaru impedancji Wiesław Miczulski* W artykule przedstawiono wyniki badań ilustrujące wpływ nieliniowości elementów układu porównania napięć na
Wpływ nieliniowości elementów układu pomiarowego na błąd pomiaru impedancji Wiesław Miczulski* W artykule przedstawiono wyniki badań ilustrujące wpływ nieliniowości elementów układu porównania napięć na
ZWARTE PRĘTY ROZRUCHOWE W SILNIKU SYNCHRONICZNYM Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM
 ` Maszyny Elektryczne Zeszyty Problemowe Nr 3/2015 (107) 145 Maciej Gwoździewicz Wydział Elektryczny, Politechnika Wrocławska ZWARTE PRĘTY ROZRUCHOWE W SILNIKU SYNCHRONICZNYM Z MAGNESAMI TRWAŁYMI O ROZRUCHU
` Maszyny Elektryczne Zeszyty Problemowe Nr 3/2015 (107) 145 Maciej Gwoździewicz Wydział Elektryczny, Politechnika Wrocławska ZWARTE PRĘTY ROZRUCHOWE W SILNIKU SYNCHRONICZNYM Z MAGNESAMI TRWAŁYMI O ROZRUCHU
ROZMYTE STEROWANIE ŚLIZGOWE UKŁADU NAPĘDOWEGO Z SILNIKIEM PRĄDU STAŁEGO
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr59 Politechniki Wrocławskiej Nr 59 Studia i Materiały Nr 26 2006 Sterowanie rozmyte, sterowanie ślizgowe, automatyka napędu elektrycznego
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr59 Politechniki Wrocławskiej Nr 59 Studia i Materiały Nr 26 2006 Sterowanie rozmyte, sterowanie ślizgowe, automatyka napędu elektrycznego
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink.
 Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI
 WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI Stefan WÓJTOWICZ, Katarzyna BIERNAT ZAKŁAD METROLOGII I BADAŃ NIENISZCZĄCYCH INSTYTUT ELEKTROTECHNIKI ul. Pożaryskiego 8, 04-703 Warszawa tel. (0)
WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI Stefan WÓJTOWICZ, Katarzyna BIERNAT ZAKŁAD METROLOGII I BADAŃ NIENISZCZĄCYCH INSTYTUT ELEKTROTECHNIKI ul. Pożaryskiego 8, 04-703 Warszawa tel. (0)
UKŁADY Z PĘTLĄ SPRZĘŻENIA FAZOWEGO (wkładki DA171A i DA171B) 1. OPIS TECHNICZNY UKŁADÓW BADANYCH
 1. OPIS TECHNICZNY UKŁADÓW BADANYCH") UKŁADY Z PĘTLĄ SPRZĘŻENIA FAZOWEGO (wkładki DA171A i DA171B) WSTĘP Układy z pętlą sprzężenia fazowego (ang. phase-locked loop, skrót PLL) tworzą dynamicznie rozwijającą się klasę układów, stosowanych głównie
UKŁADY Z PĘTLĄ SPRZĘŻENIA FAZOWEGO (wkładki DA171A i DA171B) WSTĘP Układy z pętlą sprzężenia fazowego (ang. phase-locked loop, skrót PLL) tworzą dynamicznie rozwijającą się klasę układów, stosowanych głównie
SZTUCZNA INTELIGENCJA
 SZTUCZNA INTELIGENCJA SYSTEMY ROZMYTE Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Katedra Automatyki i Inżynierii Biomedycznej Laboratorium
SZTUCZNA INTELIGENCJA SYSTEMY ROZMYTE Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Katedra Automatyki i Inżynierii Biomedycznej Laboratorium
Tomasz Żabiński, tomz@prz-rzeszow.pl, 2006-03-14 90
 Poniżej przedstawiono zagadnienie automatycznej pracy suwnicy (Sawodny et al. 2002), będącej elementem np. zautomatyzowanej linii produkcyjnej. Opracowany system sterowania realizuje bezpieczny transport
Poniżej przedstawiono zagadnienie automatycznej pracy suwnicy (Sawodny et al. 2002), będącej elementem np. zautomatyzowanej linii produkcyjnej. Opracowany system sterowania realizuje bezpieczny transport
Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Ćw. 5: Pomiar parametrów sygnałów napięciowych Zaliczenie: Podpis prowadzącego: Uwagi:
: Rok:. (2010/2011) Grupa: Ćw. 5: Pomiar parametrów sygnałów napięciowych Zaliczenie: Podpis prowadzącego: Uwagi:") Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: LABORATORIUM METROLOGII Ćw. 5: Pomiar parametrów sygnałów napięciowych Zaliczenie: Podpis prowadzącego:
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: LABORATORIUM METROLOGII Ćw. 5: Pomiar parametrów sygnałów napięciowych Zaliczenie: Podpis prowadzącego:
Interwałowe zbiory rozmyte
 Interwałowe zbiory rozmyte 1. Wprowadzenie. Od momentu przedstawienia koncepcji klasycznych zbiorów rozmytych (typu 1), były one krytykowane za postać jaką przybiera funkcja przynależności. W przypadku
Interwałowe zbiory rozmyte 1. Wprowadzenie. Od momentu przedstawienia koncepcji klasycznych zbiorów rozmytych (typu 1), były one krytykowane za postać jaką przybiera funkcja przynależności. W przypadku
STEROWANIE ADAPTACYJNE WYBRANEJ KLASY PROCESÓW INŻYNIERII ROLNICZEJ
 Inżynieria Rolnicza 11(109)/2008 STEROWANIE ADAPTACYJNE WYBRANEJ KLASY PROCESÓW INŻYNIERII ROLNICZEJ Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy przedstawiono ideę sterowania adaptacyjnego
Inżynieria Rolnicza 11(109)/2008 STEROWANIE ADAPTACYJNE WYBRANEJ KLASY PROCESÓW INŻYNIERII ROLNICZEJ Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy przedstawiono ideę sterowania adaptacyjnego
Systemy regeneracji osnowy zużytych mas formierskich, jako sposoby optymalnego zagospodarowania odpadu
 Sylwester Witek 1, Agata Witek AGH Akademia Górniczo-Hutnicza 2 Logistyka - nauka Systemy regeneracji osnowy zużytych mas formierskich, jako sposoby optymalnego zagospodarowania odpadu Wstęp Wytwarzanie
Sylwester Witek 1, Agata Witek AGH Akademia Górniczo-Hutnicza 2 Logistyka - nauka Systemy regeneracji osnowy zużytych mas formierskich, jako sposoby optymalnego zagospodarowania odpadu Wstęp Wytwarzanie
WYDZIAŁ PPT / KATEDRA INŻYNIERII BIOMEDYCZNEJ D-1 LABORATORIUM Z AUTOMATYKI I ROBOTYKI Ćwiczenie nr 4. Badanie jakości regulacji dwupołożeniowej.
 Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
Cel ćwiczenia: Zapoznanie się z zasadą działania regulatora dwupołożeniowego oraz ocena jakości regulacji dwupołożeniowej na przykładzie obiektu rzeczywistego (mikrotermostat) i badań symulacyjnych. Pytania
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
STEROWANIE ROZMYTE KURSEM I ZANURZENIEM POJAZDU PODWODNEGO BADANIA SYMULACYJNE I EKSPERYMENTALNE
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLV NR 2 (157) 24 Jerzy Garus Piotr Szymak STEROWANIE ROZMYTE KURSEM I ZANURZENIEM POJAZDU PODWODNEGO BADANIA SYMULACYJNE I EKSPERYMENTALNE STRESZCZENIE
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLV NR 2 (157) 24 Jerzy Garus Piotr Szymak STEROWANIE ROZMYTE KURSEM I ZANURZENIEM POJAZDU PODWODNEGO BADANIA SYMULACYJNE I EKSPERYMENTALNE STRESZCZENIE
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Projektowanie, analiza i symulacje bioprocesów - opis przedmiotu
 Projektowanie, analiza i symulacje bioprocesów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Projektowanie, analiza i symulacje bioprocesów Kod przedmiotu 13.9-WB-BTD-PAiSB-W-S14_pNadGen2DZNY Wydział
Projektowanie, analiza i symulacje bioprocesów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Projektowanie, analiza i symulacje bioprocesów Kod przedmiotu 13.9-WB-BTD-PAiSB-W-S14_pNadGen2DZNY Wydział
J. SZYMSZAL 1, A. GIEREK 2, J. PIĄTKOWSKI 3, J. KLIŚ 4 Politechnika Śląska, 40-019 Katowice, ul. Krasińskiego 8
 3/18 ARCHIWUM ODLEWNICTWA Rok 2006, Rocznik 6, Nr 18 (1/2) ARCHIVES OF FOUNDRY Year 2006, Volume 6, N o 18 (1/2) PAN Katowice PL ISSN 1642-5308 PROGNOZOWANIE SZEREGU CZASOWEGO WYKAZUJĄCEGO WAHANIA SEZONOWE
3/18 ARCHIWUM ODLEWNICTWA Rok 2006, Rocznik 6, Nr 18 (1/2) ARCHIVES OF FOUNDRY Year 2006, Volume 6, N o 18 (1/2) PAN Katowice PL ISSN 1642-5308 PROGNOZOWANIE SZEREGU CZASOWEGO WYKAZUJĄCEGO WAHANIA SEZONOWE
Analiza właściwości filtra selektywnego
 Ćwiczenie 2 Analiza właściwości filtra selektywnego Program ćwiczenia. Zapoznanie się z przykładową strukturą filtra selektywnego 2 rzędu i zakresami jego parametrów. 2. Analiza widma sygnału prostokątnego..
Ćwiczenie 2 Analiza właściwości filtra selektywnego Program ćwiczenia. Zapoznanie się z przykładową strukturą filtra selektywnego 2 rzędu i zakresami jego parametrów. 2. Analiza widma sygnału prostokątnego..
Ćwiczenie 5. Pomiary parametrów sygnałów napięciowych. Program ćwiczenia:
 Ćwiczenie 5 Pomiary parametrów sygnałów napięciowych Program ćwiczenia: 1. Pomiar wartości skutecznej, średniej wyprostowanej i maksymalnej sygnałów napięciowych o kształcie sinusoidalnym, prostokątnym
Ćwiczenie 5 Pomiary parametrów sygnałów napięciowych Program ćwiczenia: 1. Pomiar wartości skutecznej, średniej wyprostowanej i maksymalnej sygnałów napięciowych o kształcie sinusoidalnym, prostokątnym
Wtrącenia niemetaliczne w staliwie topionym w małym piecu indukcyjnym
 A R C H I V E S of F O U N D R Y E N G I N E E R I N G Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (897-0) Volume Special Issue /0 9 97 8/ Wtrącenia
A R C H I V E S of F O U N D R Y E N G I N E E R I N G Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (897-0) Volume Special Issue /0 9 97 8/ Wtrącenia
Metodyka i system dopasowania protez słuchu w oparciu o badanie percepcji sygnału mowy w szumie
 Metodyka i system dopasowania protez w oparciu o badanie percepcji sygnału mowy w szumie opracowanie dr inż. Piotr Suchomski Koncepcja metody korekcji ubytku Dopasowanie szerokiej dynamiki odbieranego
Metodyka i system dopasowania protez w oparciu o badanie percepcji sygnału mowy w szumie opracowanie dr inż. Piotr Suchomski Koncepcja metody korekcji ubytku Dopasowanie szerokiej dynamiki odbieranego
WYKORZYSTANIE OPROGRAMOWANIA ADAMS/CAR RIDE W BADANIACH KOMPONENTÓW ZAWIESZENIA POJAZDU SAMOCHODOWEGO
 ZESZYTY NAUKOWE POLITECHNIKA ŚLĄSKA 2012 Seria: TRANSPORT z. 77 Nr kol.1878 Łukasz KONIECZNY WYKORZYSTANIE OPROGRAMOWANIA ADAMS/CAR RIDE W BADANIACH KOMPONENTÓW ZAWIESZENIA POJAZDU SAMOCHODOWEGO Streszczenie.
ZESZYTY NAUKOWE POLITECHNIKA ŚLĄSKA 2012 Seria: TRANSPORT z. 77 Nr kol.1878 Łukasz KONIECZNY WYKORZYSTANIE OPROGRAMOWANIA ADAMS/CAR RIDE W BADANIACH KOMPONENTÓW ZAWIESZENIA POJAZDU SAMOCHODOWEGO Streszczenie.
SYMULACJA I PROJEKT UKŁADU KONDYCJONOWANIA SYGNAŁU GENERATORA ELEKTROMAGNETYCZNEGO DO ZASILANIA TŁUMIKA MAGNETOREOLOGICZNEGO
 MACIEJ ROSÓŁ, BOGDAN SAPIŃSKI ** SYMULACJA I PROJEKT UKŁADU KONDYCJONOWANIA SYGNAŁU GENERATORA ELEKTROMAGNETYCZNEGO DO ZASILANIA TŁUMIKA MAGNETOREOLOGICZNEGO SIMULATION AND DESIGN OF CONDITIONING SYSTEM
MACIEJ ROSÓŁ, BOGDAN SAPIŃSKI ** SYMULACJA I PROJEKT UKŁADU KONDYCJONOWANIA SYGNAŁU GENERATORA ELEKTROMAGNETYCZNEGO DO ZASILANIA TŁUMIKA MAGNETOREOLOGICZNEGO SIMULATION AND DESIGN OF CONDITIONING SYSTEM
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Bierne układy różniczkujące i całkujące typu RC
 Instytut Fizyki ul. Wielkopolska 15 70-451 Szczecin 6 Pracownia Elektroniki. Bierne układy różniczkujące i całkujące typu RC........ (Oprac. dr Radosław Gąsowski) Zakres materiału obowiązujący do ćwiczenia:
Instytut Fizyki ul. Wielkopolska 15 70-451 Szczecin 6 Pracownia Elektroniki. Bierne układy różniczkujące i całkujące typu RC........ (Oprac. dr Radosław Gąsowski) Zakres materiału obowiązujący do ćwiczenia:
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
POMIAR CZĘSTOTLIWOŚCI NAPIĘCIA W URZĄDZENIACH AUTOMATYKI ELEKTROENERGETYCZNEJ
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 63 Politechniki Wrocławskiej Nr 63 Studia i Materiały Nr 9 9 Piotr NIKLAS* pomiar częstotliwości, składowe harmoniczne, automatyka elektroenergetyczna
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 63 Politechniki Wrocławskiej Nr 63 Studia i Materiały Nr 9 9 Piotr NIKLAS* pomiar częstotliwości, składowe harmoniczne, automatyka elektroenergetyczna
MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO ZASILACZA AWARYJNEGO UPS O STRUKTURZE TYPU VFI
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 91 Electrical Engineering 2017 DOI 10.21008/j.1897-0737.2017.91.0011 Michał KRYSTKOWIAK* Łukasz CIEPLIŃSKI* MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 91 Electrical Engineering 2017 DOI 10.21008/j.1897-0737.2017.91.0011 Michał KRYSTKOWIAK* Łukasz CIEPLIŃSKI* MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO
1. Podstawowe pojęcia
 1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
1. Podstawowe pojęcia Sterowanie optymalne obiektu polega na znajdowaniu najkorzystniejszej decyzji dotyczącej zamierzonego wpływu na obiekt przy zadanych ograniczeniach. Niech dany jest obiekt opisany
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu
 Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
PORÓWNANIE WYBRANYCH SCHEMATÓW RÓŻNICO- WYCH NA PRZYKŁADZIE RÓWNANIA SELECTED DIFFERENTIAL SCHEMES COMPARISON BY MEANS OF THE EQUATION
 Mirosław GUZIK Grzegorz KOSZŁKA PORÓWNANIE WYBRANYCH SCHEMATÓW RÓŻNICO- WYCH NA PRZYKŁADZIE RÓWNANIA SELECTED DIFFERENTIAL SCHEMES COMPARISON BY MEANS OF THE EQUATION W artykule przedstawiono niektóre
Mirosław GUZIK Grzegorz KOSZŁKA PORÓWNANIE WYBRANYCH SCHEMATÓW RÓŻNICO- WYCH NA PRZYKŁADZIE RÓWNANIA SELECTED DIFFERENTIAL SCHEMES COMPARISON BY MEANS OF THE EQUATION W artykule przedstawiono niektóre