Systemy wspomagające projektowanie i programowanie systemów zrobotyzowanych
|
|
|
- Krzysztof Sowiński
- 6 lat temu
- Przeglądów:
Transkrypt
1 Systemy wspomagające projektowanie i programowanie systemów zrobotyzowanych
2 Dassault Systemes STRATEGICZNE RELACJE Z DOSTAWCAMI STRATEGICZNE RELACJE Z KLIENTAMI KLASYFIKACJA IP ORAZ OCHRONA PLANOWANIE PRODUKTU I ZARZĄDZANIE PROGRAMEM JAKOŚĆ GLOBALNY ROZWÓJ PRODUKTU

3 Dassault Systemes CATIA DESIGN 3D CATIA CATIA SYSTEMS ENGINEERING Integracja systemów inżynierskich, kompleksowe zarządzanie procesem rozwojowym. Wymagania techniczne, definicja architektury systemów, modelowanie przestrzenne, symulacja kompleksowych systemów, rozwój oprogramowania. Zarządzanie w kontekście całego produktu.

4 System Delmia

5
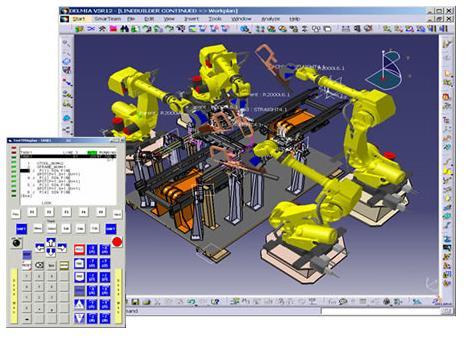
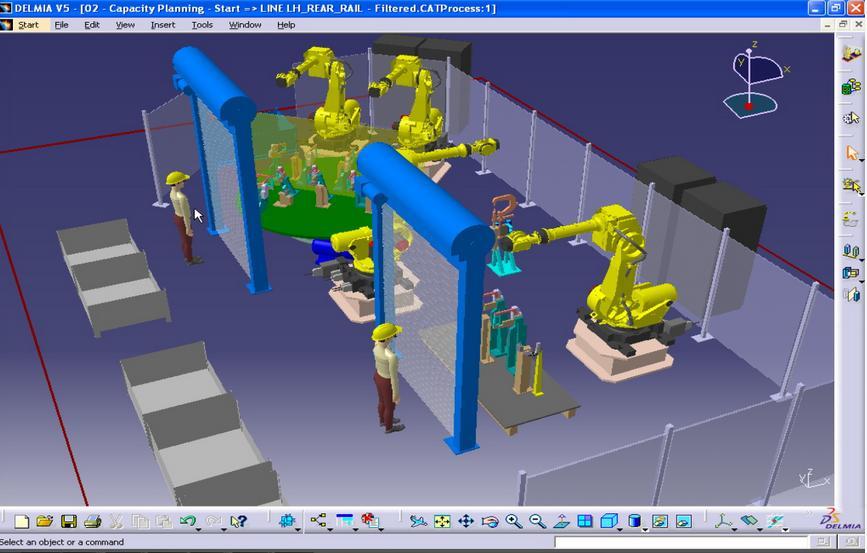
6 System Delmia Delmia Robotics kompletna platforma służąca robotyzacji i automatyzacji procesów przemysłowych. Umożliwia programowanie trajektorii ruchów manipulatora metodą OLP. Umożliwia symulację procesów, w których wykorzystywana jest większa liczba robotów i stacji roboczych. Gwarantuje wykrywanie kolizji. Ułatwia i umożliwia przeprowadzenie optymalizacji czasu cykli roboczych. Zawiera narzędzia dedykowane projektowanym i robotyzowanym: procesom spawalniczym, procesom spawania łukowego, procesom zgrzewania punktowego i in. Oprogramowanie wyposażono w bazę robotów największych producentów oraz możliwość translacji kodu na jednostkę roboczą Na podstawie: oraz

7 System Delmia

8 Delmia V5 Robotic Overview Full Automatic Robotic Stations
9 Layout

10 Device Building - Gun &Gripper

11 Robot Creation & Inverse Kinematic

12 Robotic Gun access & Feasibility Study

13 Robot Applications Spot Welding & Gun-Gripper +Pert Chart

14 Spot Welding & Gun-Gripper+Gantt Chart

15 Robotic Gripper Handling

16 Robot Workcell Sequencing Automatic Task collision for I/O zones and Interference Zones

17 OFF-Line Robot Programming(OLP) & Calibration Calibration include: - Tool point Calibration - Workpiece (Jig & Fixtre) Calibration - Robot Signature Calibration Create Robot Offline Programm Import to Robot controller and Run Robot Task According to Digital Factory
18
19
20 Projektowanie stanowisk zrobotyzowanych i programowanie off-line Przykładowe narzędzia modelowania wirtualnego i projektowania stanowisk i komórek zrobotyzowanych: RobotStudio Roboguide K-Roset KukaSim Pro ABB Fanuc Kawasaki Kuka
21 System umożliwia między innymi: RobotStudio Modelowanie stanowiska przez odpowiednie rozmieszczenie elementów składowych Możliwość programowania wykorzystanych elementów składowych systemu wytwarzania Można generować automatycznie programy sterujące robotami oraz ingerować w te programy w razie potrzeby Symulacja i wizualizacja pracy systemu Tworzenie zdublowanych ruchów Funkcja MultiMove, współpraca robotów przy jednym przedmiocie Wykrywania kolizji i alarmowanie użytkownika o stanie przed alarmowym Informowanie o alarmach za pomocą Internetu zdalne usuwanie błędów Możliwość odczytu sygnałów stanu wejść i wyjść I/O Możliwość importowania plików CAD Wg. S. Krenich, M. Spyrka, MODELOWANIE I SYMULACJA ZROBOTYZOWANEGO GNIAZDA PRODUKCYJNEGO Z WYKORZYSTANIEM APLIKACJI ABB ROBOT STUDIO, Pomiary Automatyka Robotyka 2/2011

22 RobotStudio Operacje technologiczne i manipulacyjno-transportowe przypisane poszczególnym elementom składowym gniazda: wózek widłowy: operacja01 dostarczanie palet z pociętymi arkuszami blachy na stanowisko operacja02 wywóz pustych palet do magazynu w celu uzupełnienia blachy robot pierwszy ROB1: operacja01 pobieranie arkusza blachy gładkiej z palet operacja02 transport arkusza na prasę operacja03 wysterowanie sygnału do zamknięcia prasy robot drugi ROB2: operacja01 pobieranie wytłoczonych profili operacja02 odkładanie profilu blachy na taśmociąg operacja03 wysterowanie sygnału uruchamiającego pracę trzeciego robota robot trzeci ROB3: operacja01 rozpoczęcie malowania profilu operacja02 wysterowanie sygnału taktującego ruch taśmociągu. Wg. S. Krenich, M. Spyrka, MODELOWANIE I SYMULACJA ZROBOTYZOWANEGO GNIAZDA PRODUKCYJNEGO Z WYKORZYSTANIEM APLIKACJI ABB ROBOT STUDIO, Pomiary Automatyka Robotyka 2/2011
23 RobotStudio Kolejne etapy tworzenia wirtualnego modelu gniazda do tłoczenia blachy dachówkowej: zdefiniowanie stanowiska jako bazy do umieszczania elementów składowych, przy czym można wykorzystać istniejący model systemu produkcyjnego lub wybrać opcję pustej stacji, którą można konfigurować od podstaw, wprowadzenie do wirtualnego środowiska projektowanego systemu robotów z bibliotek robotów firmy ABB, uzbrojenie robotów w narzędzia, przy czym chwytaki przyssawkowe zostały zaprojektowane w zewnętrznej aplikacji i wprowadzone do systemu, wprowadzenie z bibliotek aplikacji urządzenia transportującego (taśmociąg), palet, wózka widłowego i innych elementów koniecznych do ustawiania elementów systemu, wprowadzenie modelu prasy tłoczącej zrealizowanego w zewnętrznej aplikacji (Catia).

24 RobotStudio Zaprojektowane stanowisko: 2 roboty IRB 4400L o udźwigu 10 kg i zasięgu 2.55 m, 1robot IRB 2400 o nośności 10 kg i zasięgu 1,5 m.
25 RobotStudio Symulację pracy poprzedza wprowadzenie w tryb ruchu elementów składowych systemu oraz ich wzajemne skorelowanie, co zrealizowano przez: wykorzystanie opcji Create Mechanizm, która umożliwia zdefiniowanie części podlegających ruchowi i nieruchomych, zakresów ruchu oraz sygnałów wyzwalających ruch i potwierdzających wykonanie ruchu. W ten sposób wprowadzono w tryb ruchu prasę oraz taśmociąg. Przez wykorzystanie opcji Teach Target w celu programowania zadaniowego robotów, co w praktyce realizowane było jako zadawanie punktów w przestrzeni robotów, przez które przemieszczana jest końcówka robota wraz z narzędziem lub przedmiotem. Na podstawie zadanych punktów utworzono ścieżki ruchu (Path) a następnie przeprowadzono synchronizację każdego z trzech robotów z wirtualnymi kontrolerami. Przez wykorzystanie opcji Events, która umożliwia ustawienie zależności i powiązań ruchowych jak i sygnałowych pomiędzy poszczególnymi elementami systemu. Istnieje również możliwość ustawienia trybu znikania elementów systemu podczas symulacji pracy. W analizowanym systemie definiowanie powiązań między obiektami odbywało się na zasadzie ustawiania odpowiednich sygnałów z poszczególnych robotów przez opcję Offline i Comunication.
26 RobotStudio Fragment programu wygenerowanego w języku Rapid dla robota ROB1 MODULE Module1 PROC Path_10() MoveL Target_10,v1000,z10,chwytak_1\WObj:=blacha_gl; MoveL Target_50,v1000,z10,chwytak_1\WObj:=blacha_gl; MoveL Target_20,v1000,fine,chwytak_1\WObj:=blacha_gl; SetDO signal1,1; MoveL Target_50,v1000,z10,chwytak_1\WObj:=blacha_gl; MoveL Target_10,v1000,z10,chwytak_1\WObj:=blacha_gl; MoveL Target_60,v1000,fine,chwytak_1\WObj:=blacha_gl;. MoveL Target_10,v1000,fine,chwytak_1\WObj:=blacha_gl; SetDO signal2,1; MoveL Target_10,v1000,fine,chwytak_1\WObj:=blacha_gl; SetDO signal2,0; ENDPROC PROC main() Path_10; ENDPROC ENDMODULE
Projektowanie systemów zrobotyzowanych
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
Projektowanie systemów zrobotyzowanych
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 2 Temat: Rozpoczęcie pracy z programem RobotStudio Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 2 Temat: Rozpoczęcie pracy z programem RobotStudio Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin
4. Chwytaki robotów przemysłowych Wstęp Metody doboru chwytaków robotów przemysłowych Zasady projektowania chwytaków robotów
 Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Kalibracja robotów przemysłowych
 Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki
 Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
Rys. 1. Brama przesuwna do wykonania na zajęciach
 Programowanie robotów off-line 2 Kuka.Sim Pro Import komponentów do środowiska Kuka.Sim Pro i modelowanie chwytaka. Cel ćwiczenia: Wypracowanie umiejętności dodawania własnych komponentów do programu oraz
Programowanie robotów off-line 2 Kuka.Sim Pro Import komponentów do środowiska Kuka.Sim Pro i modelowanie chwytaka. Cel ćwiczenia: Wypracowanie umiejętności dodawania własnych komponentów do programu oraz
Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu
 Jakub Stec Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu Kraków Globalny lider w technologiach zasilania i automatyki ABB Prezentacja firmy 145,000 pracowników w 100 krajach Roczny
Jakub Stec Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu Kraków Globalny lider w technologiach zasilania i automatyki ABB Prezentacja firmy 145,000 pracowników w 100 krajach Roczny
Technik mechanik. Zespół Szkół Nr 2 w Sanoku
 Technik mechanik Zespół Szkół Nr 2 w Sanoku Technik mechanik Głównym celem pracy technika mechanika jest naprawa maszyn i urządzeń technicznych oraz uczestniczenie w procesie ich wytwarzania i użytkowania.
Technik mechanik Zespół Szkół Nr 2 w Sanoku Technik mechanik Głównym celem pracy technika mechanika jest naprawa maszyn i urządzeń technicznych oraz uczestniczenie w procesie ich wytwarzania i użytkowania.
Program wspomagający obsługę zrobotyzowanych stanowisk paletyzacji
 Program wspomagający obsługę zrobotyzowanych stanowisk paletyzacji Dawid Czemierowski, Krzysztof Kukiełka Instytut Automatyki i Robotyki Politechniki Warszawskiej W artykule przedstawiono program wspomagający
Program wspomagający obsługę zrobotyzowanych stanowisk paletyzacji Dawid Czemierowski, Krzysztof Kukiełka Instytut Automatyki i Robotyki Politechniki Warszawskiej W artykule przedstawiono program wspomagający
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
S Y L A B U S P R Z E D M I O T U. Roboty przemysłowe
 "Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... S Y L A B U S P R Z E D M I O T U NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu:
"Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... S Y L A B U S P R Z E D M I O T U NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu:
Cel ćwiczenia: Nabycie umiejętności poruszania się w przestrzeni programu Kuka.Sim Pro oraz zapoznanie się z biblioteką gotowych modeli programu.
 Roboty Przemysłowe - Programowanie robotów off-line 1 Oprogramowanie Kuka.SimPro Stworzenie stanowiska paletyzacji z elementów dostępnych w bibliotece Cel ćwiczenia: Nabycie umiejętności poruszania się
Roboty Przemysłowe - Programowanie robotów off-line 1 Oprogramowanie Kuka.SimPro Stworzenie stanowiska paletyzacji z elementów dostępnych w bibliotece Cel ćwiczenia: Nabycie umiejętności poruszania się
Wykład 1. Wprowadzenie do systemów CAD
 Wykład 1 Wprowadzenie do systemów CAD Objaśnienie pojęć CAD (ang. Computer Aided Design) - komputerowe wspomaganie projektowania, obejmuje wszystkie etapy przygotowania projektu: opracowanie koncepcji,
Wykład 1 Wprowadzenie do systemów CAD Objaśnienie pojęć CAD (ang. Computer Aided Design) - komputerowe wspomaganie projektowania, obejmuje wszystkie etapy przygotowania projektu: opracowanie koncepcji,
ROBOT PRZEMYSŁOWY W DOJU KRÓW
 Problemy Inżynierii Rolniczej nr 4/2009 Henryk Juszka, Tomasz Kapłon, Marcin Tomasik, Krystian Góra Katedra Energetyki i Automatyzacji Procesów Rolniczych Uniwersytet Rolniczy im. H. Kołłątaja w Krakowie
Problemy Inżynierii Rolniczej nr 4/2009 Henryk Juszka, Tomasz Kapłon, Marcin Tomasik, Krystian Góra Katedra Energetyki i Automatyzacji Procesów Rolniczych Uniwersytet Rolniczy im. H. Kołłątaja w Krakowie
Podczas tego szkolenia, użytkownik zapozna się z zasadami tworzenia łańcuchów kinematycznych, więzami oraz dynamicznymi symulacjami zaprojektowanych
 KATALOG SZKOLEŃ IPL Solutions Jesteśmy Certyfikowanym Partnerem Edukacyjnym producenta rozwiązań PLM Dassault Systemes S.A. Oferujemy szkolenia z zakresu CAD/CAM, które prowadzone są przez doświadczonych
KATALOG SZKOLEŃ IPL Solutions Jesteśmy Certyfikowanym Partnerem Edukacyjnym producenta rozwiązań PLM Dassault Systemes S.A. Oferujemy szkolenia z zakresu CAD/CAM, które prowadzone są przez doświadczonych
Obróbka po realnej powierzchni o Bez siatki trójkątów o Lepsza jakość po obróbce wykańczającej o Tylko jedna tolerancja jakości powierzchni
 TEBIS Wszechstronny o Duża elastyczność programowania o Wysoka interaktywność Delikatne ścieżki o Nie potrzebny dodatkowy moduł HSC o Mniejsze zużycie narzędzi o Mniejsze zużycie obrabiarki Zarządzanie
TEBIS Wszechstronny o Duża elastyczność programowania o Wysoka interaktywność Delikatne ścieżki o Nie potrzebny dodatkowy moduł HSC o Mniejsze zużycie narzędzi o Mniejsze zużycie obrabiarki Zarządzanie
CO WYRÓŻNIA FIRMĘ BLUMENBECKER IPS POLSKA?
 Profil przedsiębiorstwa BLUMENBECKER IPS Polska Sp. z o.o. Ul. Ligocka 103 Katowice www.blumenbecker.pl 013 CO WYRÓŻNIA FIRMĘ BLUMENBECKER IPS POLSKA? TEŚMY CZĘŚCIĄ GRUPY FIRM AUTOMATYZACJA PRODUKCJI DOSTAWY
Profil przedsiębiorstwa BLUMENBECKER IPS Polska Sp. z o.o. Ul. Ligocka 103 Katowice www.blumenbecker.pl 013 CO WYRÓŻNIA FIRMĘ BLUMENBECKER IPS POLSKA? TEŚMY CZĘŚCIĄ GRUPY FIRM AUTOMATYZACJA PRODUKCJI DOSTAWY
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
ROBOT SPAWALNICZY PRECYZYJNY SZYBKI EFEKTYWNY ŁATWA OBSŁUGA. EasyWelder
 ROBOT SPAWALNICZY PRECYZYJNY SZYBKI EFEKTYWNY ŁATWA OBSŁUGA EasyWelder Rewolucyjny robot spawalniczy - EasyWelder Intuicyjne i szybkie programowanie ścieżek gwarantuje efektywne i precyzyjne spawanie nawet
ROBOT SPAWALNICZY PRECYZYJNY SZYBKI EFEKTYWNY ŁATWA OBSŁUGA EasyWelder Rewolucyjny robot spawalniczy - EasyWelder Intuicyjne i szybkie programowanie ścieżek gwarantuje efektywne i precyzyjne spawanie nawet
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
Spis treści 1. Oprogramowanie wizualizacyjne IFTER EQU Dodanie integracji CKD Wprowadzanie konfiguracji do programu EQU... 6 a.
 Spis treści 1. Oprogramowanie wizualizacyjne IFTER EQU... 3 2. Dodanie integracji CKD-500... 6 3. Wprowadzanie konfiguracji do programu EQU... 6 a. Wprowadzanie kontrolerów... 6 b. Wprowadzenie przejść...
Spis treści 1. Oprogramowanie wizualizacyjne IFTER EQU... 3 2. Dodanie integracji CKD-500... 6 3. Wprowadzanie konfiguracji do programu EQU... 6 a. Wprowadzanie kontrolerów... 6 b. Wprowadzenie przejść...
PLAN SZKOLEŃ Femap. Nasza oferta: Solid Edge najefektywniejszy dostępny obecnie na rynku system CAD klasy mid-range,
 PLAN SZKOLEŃ Femap PLAN SZKOLEŃ Femap Firma GM System Integracja Systemów Inżynierskich Sp. z o.o. została założona w 2001 roku. Zajmujemy się dostarczaniem systemów CAD/CAM/CAE/PDM. Jesteśmy jednym z
PLAN SZKOLEŃ Femap PLAN SZKOLEŃ Femap Firma GM System Integracja Systemów Inżynierskich Sp. z o.o. została założona w 2001 roku. Zajmujemy się dostarczaniem systemów CAD/CAM/CAE/PDM. Jesteśmy jednym z
1 Oprogramowanie wizualizacyjne IFTER EQU 3 2 Wizualizacja centrali Integra firmy Satel 7 3 Konfiguracja centrali Siemens SPC do połączenia z
 1 1 Oprogramowanie wizualizacyjne IFTER EQU 3 2 Wizualizacja centrali Integra firmy Satel 7 3 Konfiguracja centrali Siemens SPC do połączenia z oprogramowaniem IFTER EQU 10 3.1 Konfiguracja centrali 10
1 1 Oprogramowanie wizualizacyjne IFTER EQU 3 2 Wizualizacja centrali Integra firmy Satel 7 3 Konfiguracja centrali Siemens SPC do połączenia z oprogramowaniem IFTER EQU 10 3.1 Konfiguracja centrali 10
SINUMERIK Collision Avoidance Zabezpieczenie przed wystąpieniem kolizji
 Zabezpieczenie przed wystąpieniem kolizji Optym. zabezpieczenie: Monitorowanie 3D w czasie rzeczywistym Monitorowanie statycznych i ruchomych komponentów oraz narzędzia Dla skomplik. operacji: Monitorowanie
Zabezpieczenie przed wystąpieniem kolizji Optym. zabezpieczenie: Monitorowanie 3D w czasie rzeczywistym Monitorowanie statycznych i ruchomych komponentów oraz narzędzia Dla skomplik. operacji: Monitorowanie
MODELOWANIE I SYMULACJA ZROBOTYZOWANEGO GNIAZDA PRODUKCYJNEGO Z WYKORZYSTANIEM APLIKACJI ABB ROBOT STUDIO
 dr in. Stanisaw Krenich mgr in. Marcin Spyrka Instytut Technologii Maszyn i Automatyzacji Produkcji Politechnika Krakowska MODELOWANIE I SYMULACJA ZROBOTYZOWANEGO GNIAZDA PRODUKCYJNEGO Z WYKORZYSTANIEM
dr in. Stanisaw Krenich mgr in. Marcin Spyrka Instytut Technologii Maszyn i Automatyzacji Produkcji Politechnika Krakowska MODELOWANIE I SYMULACJA ZROBOTYZOWANEGO GNIAZDA PRODUKCYJNEGO Z WYKORZYSTANIEM
LABORATORIUM Podstawy mechatroniki Programowanie robota przemysłowego ABB IRB 1600 w środowisku ABB RobotStudio
 Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów LABORATORIUM Podstawy mechatroniki Programowanie robota przemysłowego ABB IRB 1600 w środowisku ABB RobotStudio Wrocław 2016 Laboratorium
Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów LABORATORIUM Podstawy mechatroniki Programowanie robota przemysłowego ABB IRB 1600 w środowisku ABB RobotStudio Wrocław 2016 Laboratorium
Politechnika Krakowska im. Tadeusza Kościuszki KARTA PRZEDMIOTU. obowiązuje słuchaczy rozpoczynających studia podyplomowe w roku akademickim 2018/2019
 Wzór nr 3 Politechnika Krakowska im. Tadeusza Kościuszki KARTA PRZEDMIOTU obowiązuje słuchaczy rozpoczynających studia podyplomowe w roku akademickim 2018/2019 Nazwa studiów podyplomowych Technologie Informacyjne
Wzór nr 3 Politechnika Krakowska im. Tadeusza Kościuszki KARTA PRZEDMIOTU obowiązuje słuchaczy rozpoczynających studia podyplomowe w roku akademickim 2018/2019 Nazwa studiów podyplomowych Technologie Informacyjne
Nasza oferta SZKOLENIOWA
 Katalog szkoleń IPL Solutions Jesteśmy Certyfikowanym Partnerem Edukacyjnym producenta rozwiązań PLM Dassault Systemes S.A. Oferujemy szkolenia z zakresu CAD/CAM, które prowadzone są przez doświadczonych
Katalog szkoleń IPL Solutions Jesteśmy Certyfikowanym Partnerem Edukacyjnym producenta rozwiązań PLM Dassault Systemes S.A. Oferujemy szkolenia z zakresu CAD/CAM, które prowadzone są przez doświadczonych
Automatyka i Robotyka II stopień ogólno akademicki. studia stacjonarne Automatyka Przemysłowa Katedra Automatyki i Robotyki Dr inż.
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Programy CAD/CAE w praktyce inżynierskiej. Nazwa modułu w języku angielskim CAD/CAM for Engineering Applications Obowiązuje od roku akademickiego
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Programy CAD/CAE w praktyce inżynierskiej. Nazwa modułu w języku angielskim CAD/CAM for Engineering Applications Obowiązuje od roku akademickiego
Projektowanie Wirtualne bloki tematyczne PW I
 Podstawowe zagadnienia egzaminacyjne Projektowanie Wirtualne - część teoretyczna Projektowanie Wirtualne bloki tematyczne PW I 1. Projektowanie wirtualne specyfika procesu projektowania wirtualnego, podstawowe
Podstawowe zagadnienia egzaminacyjne Projektowanie Wirtualne - część teoretyczna Projektowanie Wirtualne bloki tematyczne PW I 1. Projektowanie wirtualne specyfika procesu projektowania wirtualnego, podstawowe
SZKOLENIA CATIA ZAINWESTUJ W PROFESJONALNE KSZTAŁCENIE SWOJEJ KADRY!
 SZKOLENIA CATIA ZAINWESTUJ W PROFESJONALNE KSZTAŁCENIE SWOJEJ KADRY! Serdecznie zapraszamy na cykl szkoleń CATIA V5 oraz 3DEXPERIENCE z możliwością dofinansowania nawet do 80%. Poniżej publikujemy przykładowe
SZKOLENIA CATIA ZAINWESTUJ W PROFESJONALNE KSZTAŁCENIE SWOJEJ KADRY! Serdecznie zapraszamy na cykl szkoleń CATIA V5 oraz 3DEXPERIENCE z możliwością dofinansowania nawet do 80%. Poniżej publikujemy przykładowe
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
FANUC Robotics Polska
 KATALOG SZKOLEŃ FANUC Robotics Polska LOKALIZACJA KONTAKT : Centrum Szkoleniowe FANUC Robotics: FANUC Robotics Polska Ul. Tyniecka 12 52-407 Wrocław Tel.: +48 71 7766160 Fax: +48 71 7766169 E-mail: szkolenia@fanucrobotics.pl
KATALOG SZKOLEŃ FANUC Robotics Polska LOKALIZACJA KONTAKT : Centrum Szkoleniowe FANUC Robotics: FANUC Robotics Polska Ul. Tyniecka 12 52-407 Wrocław Tel.: +48 71 7766160 Fax: +48 71 7766169 E-mail: szkolenia@fanucrobotics.pl
Kurs Wizualizacja z WinCC SCADA - Zaawansowany. Spis treści. Dzień 1. I VBS w WinCC podstawy programowania (zmienne, instrukcje, pętle) (wersja 1410)
 (wersja 1410)") Spis treści Dzień 1 I VBS w WinCC podstawy programowania (zmienne, instrukcje, pętle) (wersja 1410) I-3 VBS w WinCC - Informacje ogólne I-4 Zastosowanie VBS w WinCC Runtime I-5 Wykorzystanie i wydajność
Spis treści Dzień 1 I VBS w WinCC podstawy programowania (zmienne, instrukcje, pętle) (wersja 1410) I-3 VBS w WinCC - Informacje ogólne I-4 Zastosowanie VBS w WinCC Runtime I-5 Wykorzystanie i wydajność
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
R 1. Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Interaktywne ustawianie narzędzia Kątowe ustawienie narzędzia Narzędzie pod kątem w obróbce zgrubnej i pośredniej
 TEBIS Wszechstronny Duża elastycznośd programowania Wysoka interaktywnośd Delikatne ścieżki Nie potrzebny dodatkowy moduł HSC Mniejsze zużycie narzędzi Mniejsze zużycie obrabiarki Zarządzanie pracą Przegląd
TEBIS Wszechstronny Duża elastycznośd programowania Wysoka interaktywnośd Delikatne ścieżki Nie potrzebny dodatkowy moduł HSC Mniejsze zużycie narzędzi Mniejsze zużycie obrabiarki Zarządzanie pracą Przegląd
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARi/17/Z Automatyczny mini wojownik. projektowania urządzeń automatycznych opartych
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARi/17/Z Automatyczny mini wojownik. projektowania urządzeń automatycznych opartych
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: PROGRAMOWANIE ROBOTÓW Programming of robots Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA, Rodzaj zajęć: wykład, laboratorium Forma studiów:
Nazwa przedmiotu: PROGRAMOWANIE ROBOTÓW Programming of robots Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA, Rodzaj zajęć: wykład, laboratorium Forma studiów:
Kurs OPC S7. Spis treści. Dzień 1. I OPC motywacja, zakres zastosowań, podstawowe pojęcia dostępne specyfikacje (wersja 1501)
") Spis treści Dzień 1 I OPC motywacja, zakres zastosowań, podstawowe pojęcia dostępne specyfikacje (wersja 1501) I-3 O czym będziemy mówić? I-4 Typowe sytuacje I-5 Klasyczne podejście do komunikacji z urządzeniami
Spis treści Dzień 1 I OPC motywacja, zakres zastosowań, podstawowe pojęcia dostępne specyfikacje (wersja 1501) I-3 O czym będziemy mówić? I-4 Typowe sytuacje I-5 Klasyczne podejście do komunikacji z urządzeniami
Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania
 1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
Systemy Informatyki Przemysłowej
 Systemy Informatyki Przemysłowej Profil absolwenta Profil absolwenta Realizowany cel dydaktyczny związany jest z: tworzeniem, wdrażaniem oraz integracją systemów informatycznych algorytmami rozpoznawania
Systemy Informatyki Przemysłowej Profil absolwenta Profil absolwenta Realizowany cel dydaktyczny związany jest z: tworzeniem, wdrażaniem oraz integracją systemów informatycznych algorytmami rozpoznawania
PLAN SZKOLEŃ FEMAP. Nasza oferta: Solid Edge najefektywniejszy dostępny obecnie na rynku system CAD klasy mid-range,
 PLAN SZKOLEŃ FEMAP Firma GM System Integracja Systemów Inżynierskich Sp. z o.o. została założona w 2001 roku. Zajmujemy się dostarczaniem systemów CAD/CAM/CAE/PDM. Jesteśmy jednym z największych polskich
PLAN SZKOLEŃ FEMAP Firma GM System Integracja Systemów Inżynierskich Sp. z o.o. została założona w 2001 roku. Zajmujemy się dostarczaniem systemów CAD/CAM/CAE/PDM. Jesteśmy jednym z największych polskich
Programowanie robotów przemysłowych Fanuc Robotics
 Programowanie robotów przemysłowych Fanuc Robotics Jednym z istotnych zagadnień, z jakim stykają się współczesne przedsiębiorstwa produkcyjne, jest konieczność szybkiej zmiany produkowanego asortymentu
Programowanie robotów przemysłowych Fanuc Robotics Jednym z istotnych zagadnień, z jakim stykają się współczesne przedsiębiorstwa produkcyjne, jest konieczność szybkiej zmiany produkowanego asortymentu
WYKORZYSTANIE ROBOTA PRZEMYSŁOWEGO DO SYMULACJI RUCHU OBIEKTU W BADANIU OPTOELEKTRONICZNYCH GŁOWIC ŚLEDZĄCYCH
 Dr inż. Wojciech KACZMAREK Dr inż. Jarosław PANASIUK Karol GOSPODARCZYK Wojskowa Akademia Techniczna WYKORZYSTANIE ROBOTA PRZEMYSŁOWEGO DO SYMULACJI RUCHU OBIEKTU W BADANIU OPTOELEKTRONICZNYCH GŁOWIC ŚLEDZĄCYCH
Dr inż. Wojciech KACZMAREK Dr inż. Jarosław PANASIUK Karol GOSPODARCZYK Wojskowa Akademia Techniczna WYKORZYSTANIE ROBOTA PRZEMYSŁOWEGO DO SYMULACJI RUCHU OBIEKTU W BADANIU OPTOELEKTRONICZNYCH GŁOWIC ŚLEDZĄCYCH
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy: Polski Semestr 1 RME-1-103-s Podstawy
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy: Polski Semestr 1 RME-1-103-s Podstawy
MK-Tech, Michał Kowalski, ul. Katowicka 37/1, 61-131 Poznań, tel./fax. +48 61 875-15-23 NIP: 779 145 54 90, REGON: 300031304
 Jesteśmy dynamicznie rozwijająca się firmą specjalizującą się w automatyzacji procesów produkcyjnych. Dzięki rozbudowanemu parkowi maszyn, wieloletniemu doświadczeniu oraz wysoko wykwalifikowanej kadrze
Jesteśmy dynamicznie rozwijająca się firmą specjalizującą się w automatyzacji procesów produkcyjnych. Dzięki rozbudowanemu parkowi maszyn, wieloletniemu doświadczeniu oraz wysoko wykwalifikowanej kadrze
Automatyka i Robotyka. Dr inż. Kamil Krot
 Automatyka i Robotyka Dr inż. Kamil Krot Agenda Kompetencje - oferta badawcza i przemysłowa Projekty zrealizowane Wyposażenie Patenty do komercjalizacji Oferta dla przemysłu projektowanie, integracja i
Automatyka i Robotyka Dr inż. Kamil Krot Agenda Kompetencje - oferta badawcza i przemysłowa Projekty zrealizowane Wyposażenie Patenty do komercjalizacji Oferta dla przemysłu projektowanie, integracja i
Instrukcja z przedmiotu Napęd robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
STANOWISKO ZROBOTYZOWANE DUAL AIR LIQUIDE WELDING Z WYPOSAŻENIEM SPAWALNICZYM TOPTIG
 AIR LIQUIDE WELDING POLSKA Sp. z o.o. 40 246 Katowice ul. Porcelanowa 10 NIP:945 17 19 850 REGON :351321488 Tel : ( + 48 32) 609 04 56 Fax: ( + 48 32) 609 04 60 e-mail : jerzy.szwengruben@airliquide.com
AIR LIQUIDE WELDING POLSKA Sp. z o.o. 40 246 Katowice ul. Porcelanowa 10 NIP:945 17 19 850 REGON :351321488 Tel : ( + 48 32) 609 04 56 Fax: ( + 48 32) 609 04 60 e-mail : jerzy.szwengruben@airliquide.com
Inwestycja w robotyzację
 ASTOR WHITEPAPER Inwestycja w robotyzację Analiza Przygotowanie inwestycji Realizacja inwestycji Wykorzystanie inwestycji krok po kroku 2 ASTOR WHITEPAPER INWESTYCJA W ROBOTYZACJĘ Jak efektywnie zainwestować
ASTOR WHITEPAPER Inwestycja w robotyzację Analiza Przygotowanie inwestycji Realizacja inwestycji Wykorzystanie inwestycji krok po kroku 2 ASTOR WHITEPAPER INWESTYCJA W ROBOTYZACJĘ Jak efektywnie zainwestować
Szczegółowy opis laboratorium symulującego system produkcyjny
 Załącznik nr... (pieczęć firmowa Wykonawcy) Szczegółowy opis laboratorium symulującego system produkcyjny Opis pracowni: Laboratorium symulujące system produkcyjny zwane dalej pracownią systemów produkcyjnych
Załącznik nr... (pieczęć firmowa Wykonawcy) Szczegółowy opis laboratorium symulującego system produkcyjny Opis pracowni: Laboratorium symulujące system produkcyjny zwane dalej pracownią systemów produkcyjnych
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2016/2017
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 016/017 Kierunek studiów: Budownictwo Profil:
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 016/017 Kierunek studiów: Budownictwo Profil:
CAMdivision. CAMdivision
 CAMdivision CAMdivision - Autoryzowany partner handlowy Siemens PLM Software - Obecnie zatrudniamy ponad 20 osób Oferujemy oprogramowanie: - NX - Teamcenter - Solid Edge - CAM Express Wdrożenia systemów
CAMdivision CAMdivision - Autoryzowany partner handlowy Siemens PLM Software - Obecnie zatrudniamy ponad 20 osób Oferujemy oprogramowanie: - NX - Teamcenter - Solid Edge - CAM Express Wdrożenia systemów
Leonard G. Lobel Eric D. Boyd. Azure SQL Database Krok po kroku. Microsoft. Przekład: Marek Włodarz. APN Promise, Warszawa 2014
 Leonard G. Lobel Eric D. Boyd Microsoft TM Azure SQL Database Krok po kroku Przekład: Marek Włodarz APN Promise, Warszawa 2014 Spis treści Wprowadzenie........................................................
Leonard G. Lobel Eric D. Boyd Microsoft TM Azure SQL Database Krok po kroku Przekład: Marek Włodarz APN Promise, Warszawa 2014 Spis treści Wprowadzenie........................................................
PDM wbudowany w Solid Edge
 PDM wbudowany w Solid Edge Firma GM System Integracja Systemów Inżynierskich Sp. z o.o. została założona w 2001 roku. Zajmujemy się dostarczaniem systemów CAD/CAM/CAE/PDM. Jesteśmy jednym z największych
PDM wbudowany w Solid Edge Firma GM System Integracja Systemów Inżynierskich Sp. z o.o. została założona w 2001 roku. Zajmujemy się dostarczaniem systemów CAD/CAM/CAE/PDM. Jesteśmy jednym z największych
Wytwarzanie wspomagane komputerowo CAD CAM CNC. dr inż. Michał Michna
 Wytwarzanie wspomagane komputerowo CAD CAM CNC dr inż. Michał Michna Wytwarzanie wspomagane komputerowo CAD CAM CNC prowadzący dr inż. Grzegorz Kostro pok. EM 313 dr inż. Michał Michna pok. EM 312 materiały
Wytwarzanie wspomagane komputerowo CAD CAM CNC dr inż. Michał Michna Wytwarzanie wspomagane komputerowo CAD CAM CNC prowadzący dr inż. Grzegorz Kostro pok. EM 313 dr inż. Michał Michna pok. EM 312 materiały
Laboratorium Napędu Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
Kierunki i specjalności studiów niestacjonarnych 2017/2018
 Kierunki i specjalności studiów niestacjonarnych 2017/2018 Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez specjalności Bez specjalności
Kierunki i specjalności studiów niestacjonarnych 2017/2018 Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez specjalności Bez specjalności
Załącznik nr 1. Zawód/ podmiot. Nazwa przedmiotu zakupu j. miary ilość. szt. 4
 Załącznik nr 1 Lp. Branża Zawód/ podmiot Nazwa przedmiotu zakupu j. miary ilość 1 2 3 Stanowisko dydaktyczne z pionową płytą montażową ze sterownikiem PLC (min. SIMENS SIMATIC S7-1200 + KTP400 24we/16wy)
Załącznik nr 1 Lp. Branża Zawód/ podmiot Nazwa przedmiotu zakupu j. miary ilość 1 2 3 Stanowisko dydaktyczne z pionową płytą montażową ze sterownikiem PLC (min. SIMENS SIMATIC S7-1200 + KTP400 24we/16wy)
Na terenie Polski firma Turck jest również wyłącznym przedstawicielem następujących firm:
 O nas Firma Turck to jeden ze światowych liderów w dziedzinie automatyki przemysłowej. Przedsiębiorstwo zatrudnia ponad 4800 pracowników w 30 krajach oraz posiada przedstawicieli w kolejnych 60 krajach.
O nas Firma Turck to jeden ze światowych liderów w dziedzinie automatyki przemysłowej. Przedsiębiorstwo zatrudnia ponad 4800 pracowników w 30 krajach oraz posiada przedstawicieli w kolejnych 60 krajach.
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA 3 2. Kod przedmiotu: Ro3 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Informatyka Stosowana
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA 3 2. Kod przedmiotu: Ro3 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Informatyka Stosowana
przedmiot specjalnościowy (podstawowy / kierunkowy / inny HES) przedmiot obowiązkowy (obowiązkowy / nieobowiązkowy) polski semestr siódmy
 przedmiot obowiązkowy (obowiązkowy / nieobowiązkowy) polski semestr siódmy") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Roboty Przemysłowe Nazwa modułu w języku angielskim Industrial Robots Obowiązuje
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Roboty Przemysłowe Nazwa modułu w języku angielskim Industrial Robots Obowiązuje
Integracja systemu CAD/CAM Catia z bazą danych uchwytów obróbkowych MS Access za pomocą interfejsu API
 Dr inż. Janusz Pobożniak, pobozniak@mech.pk.edu.pl Instytut Technologii Maszyn i Automatyzacji produkcji Politechnika Krakowska, Wydział Mechaniczny Integracja systemu CAD/CAM Catia z bazą danych uchwytów
Dr inż. Janusz Pobożniak, pobozniak@mech.pk.edu.pl Instytut Technologii Maszyn i Automatyzacji produkcji Politechnika Krakowska, Wydział Mechaniczny Integracja systemu CAD/CAM Catia z bazą danych uchwytów
Droga do Industry 4.0. siemens.com/tia
 Totally Integrated Automation dla Cyfrowych Przedsiębiorstw Droga do Industry 4.0. siemens.com/tia Na drodze do Cyfrowego Przedsiębiorstwa z firmą Siemens Internet stał się realną częścią rzeczywistości
Totally Integrated Automation dla Cyfrowych Przedsiębiorstw Droga do Industry 4.0. siemens.com/tia Na drodze do Cyfrowego Przedsiębiorstwa z firmą Siemens Internet stał się realną częścią rzeczywistości
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Informacje o firmie. Ponad 10 lat doświadczenia. Zespół inżynierów i specjalistów liczący ponad 40 osób. Własne laboratorium spawalnicze
 Informacje o firmie Ponad 10 lat doświadczenia Zespół inżynierów i specjalistów liczący ponad 40 osób Własne laboratorium spawalnicze Profesjonalny zespół R&D Współpraca z liderami rynku Bogate portfolio
Informacje o firmie Ponad 10 lat doświadczenia Zespół inżynierów i specjalistów liczący ponad 40 osób Własne laboratorium spawalnicze Profesjonalny zespół R&D Współpraca z liderami rynku Bogate portfolio
Volkswagen Poznań. 6. Ogólnopolska Konferencja Jakościowa Dostawców Motoryzacyjnych 2017
 Volkswagen Poznań 6. Ogólnopolska Konferencja Jakościowa Dostawców Motoryzacyjnych 2017 Robert Koteras Volkswagen Poznań Zaawansowane metody pomiaru Możliwości i Wyzwania 6. Ogólnopolska Konferencja Jakościowa
Volkswagen Poznań 6. Ogólnopolska Konferencja Jakościowa Dostawców Motoryzacyjnych 2017 Robert Koteras Volkswagen Poznań Zaawansowane metody pomiaru Możliwości i Wyzwania 6. Ogólnopolska Konferencja Jakościowa
mediów produkcyjnych System wdrożony przez firmę PRO-CONTROL w roku 2016 w jednym z dużych zakładów produkcji kosmetycznej.
 Systemy monitoringu mediów produkcyjnych System wdrożony przez firmę PRO-CONTROL w roku 2016 w jednym z dużych zakładów produkcji kosmetycznej. Założenia: Klient potrzebował wdrożyć system, który pozwoliłby
Systemy monitoringu mediów produkcyjnych System wdrożony przez firmę PRO-CONTROL w roku 2016 w jednym z dużych zakładów produkcji kosmetycznej. Założenia: Klient potrzebował wdrożyć system, który pozwoliłby
William R. Stanek. Vademecum Administratora 2012 R2. Windows Server. Podstawy i konfiguracja. Przekład: Leszek Biolik
 William R. Stanek Vademecum Administratora Windows Server 2012 R2 Podstawy i konfiguracja Przekład: Leszek Biolik APN Promise, Warszawa 2014 Spis treści Wprowadzenie....................................
William R. Stanek Vademecum Administratora Windows Server 2012 R2 Podstawy i konfiguracja Przekład: Leszek Biolik APN Promise, Warszawa 2014 Spis treści Wprowadzenie....................................
WALIDACJA PROGRAMU PLC Z WYKORZYSTANIEM WIRTUALNEGO MODELU URZĄDZENIA W PROGRAMIE DELMIA AUTOMATION
 Słota Adam, dr inż. email: slota@mech.pk.edu.pl Borowy Szymon, mgr inż. email: szymon.borowy@wp.pl Politechnika Krakowska, Wydział Mechaniczny WALIDACJA PROGRAMU PLC Z WYKORZYSTANIEM WIRTUALNEGO MODELU
Słota Adam, dr inż. email: slota@mech.pk.edu.pl Borowy Szymon, mgr inż. email: szymon.borowy@wp.pl Politechnika Krakowska, Wydział Mechaniczny WALIDACJA PROGRAMU PLC Z WYKORZYSTANIEM WIRTUALNEGO MODELU
SPECYFIKACJA TECHNICZNO-HANDLOWA OPROGRAMOWANIA DO PRAC KONSTRUKCYJNYCH 3D (razem 6 licencji)
") ZAŁĄCZNIK NR 1 SPECYFIKACJA TECHNICZNO-HANDLOWA OPROGRAMOWANIA DO PRAC KONSTRUKCYJNYCH 3D (razem 6 licencji) I. Dwa zestawy oprogramowania (2 licencje (PODAĆ NAZWĘ PRODUCENTA I NAZWĘ PAKIETU 1. Parametryczne
ZAŁĄCZNIK NR 1 SPECYFIKACJA TECHNICZNO-HANDLOWA OPROGRAMOWANIA DO PRAC KONSTRUKCYJNYCH 3D (razem 6 licencji) I. Dwa zestawy oprogramowania (2 licencje (PODAĆ NAZWĘ PRODUCENTA I NAZWĘ PAKIETU 1. Parametryczne
NX CAD. Modelowanie powierzchniowe
 NX CAD Modelowanie powierzchniowe Firma GM System Integracja Systemów Inżynierskich Sp. z o.o. została założona w 2001 roku. Zajmujemy się dostarczaniem systemów CAD/CAM/CAE/PDM. Jesteśmy jednym z największych
NX CAD Modelowanie powierzchniowe Firma GM System Integracja Systemów Inżynierskich Sp. z o.o. została założona w 2001 roku. Zajmujemy się dostarczaniem systemów CAD/CAM/CAE/PDM. Jesteśmy jednym z największych
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
Opis systemu CitectFacilities. (nadrzędny system sterowania i kontroli procesu technologicznego)
") Opis systemu CitectFacilities (nadrzędny system sterowania i kontroli procesu technologicznego) I. Wstęp. Zdalny system sterowania, wizualizacji i nadzoru zostanie wykonany w oparciu o aplikację CitectFacilities,
Opis systemu CitectFacilities (nadrzędny system sterowania i kontroli procesu technologicznego) I. Wstęp. Zdalny system sterowania, wizualizacji i nadzoru zostanie wykonany w oparciu o aplikację CitectFacilities,
Pobierz dane z Programu PŁATNIKA. e-deklaracji
 Pobierz dane z Programu PŁATNIKA do e-deklaracji 1 epp.net ComSoft Radom 2014 (eksport Płatnik do e-deklaracje) Instrukcja Obsługi ZIiA ComSoft Radom 2 Spis: Wstęp 4 Prawa autorskie 5 Wymagania techniczne
Pobierz dane z Programu PŁATNIKA do e-deklaracji 1 epp.net ComSoft Radom 2014 (eksport Płatnik do e-deklaracje) Instrukcja Obsługi ZIiA ComSoft Radom 2 Spis: Wstęp 4 Prawa autorskie 5 Wymagania techniczne
Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską
 Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską (wynik prac grupy roboczej ds. kształcenia, kompetencji i zasobów
Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską (wynik prac grupy roboczej ds. kształcenia, kompetencji i zasobów
witamy w świecie KUKA Robotics Robotyzacja według KUKA Roboter KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła Strona 1
 witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
1 Oprogramowanie wizualizacyjne IFTER EQU
 12-12-18 Spis treści 1 Oprogramowanie wizualizacyjne IFTER EQU... 1 2 Wizualizacja centrali Integra firmy Satel... 3 3 Konfiguracja i połączenie... 6 3.1 Połączenie centrali CA64... 6 3.2 Konfiguracja
12-12-18 Spis treści 1 Oprogramowanie wizualizacyjne IFTER EQU... 1 2 Wizualizacja centrali Integra firmy Satel... 3 3 Konfiguracja i połączenie... 6 3.1 Połączenie centrali CA64... 6 3.2 Konfiguracja
Wytwarzanie wspomagane komputerowo CAD CAM CNC. dr inż. Michał Michna
 Wytwarzanie wspomagane komputerowo CAD CAM CNC dr inż. Michał Michna Wytwarzanie wspomagane komputerowo CAD CAM CNC prowadzący dr inż. Grzegorz Kostro pok. EM 313 dr inż. Michał Michna pok. EM 312 materiały
Wytwarzanie wspomagane komputerowo CAD CAM CNC dr inż. Michał Michna Wytwarzanie wspomagane komputerowo CAD CAM CNC prowadzący dr inż. Grzegorz Kostro pok. EM 313 dr inż. Michał Michna pok. EM 312 materiały
Konfigurowanie Windows 8
 Mike Halsey Andrew Bettany Egzamin 70-687 Konfigurowanie Windows 8 Przekład: Janusz Machowski APN Promise, Warszawa 2013 Spis treści Wprowadzenie.......................................................
Mike Halsey Andrew Bettany Egzamin 70-687 Konfigurowanie Windows 8 Przekład: Janusz Machowski APN Promise, Warszawa 2013 Spis treści Wprowadzenie.......................................................
PROJEKT INTERFEJSU OPERATORA DLA ZROBOTYZOWANEGO PROCESU SPAWANIA
 Dr inż. Wojciech KACZMAREK Dr inż. Jarosław PANASIUK Inż. Łukasz MINDA Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.250 PROJEKT INTERFEJSU OPERATORA DLA ZROBOTYZOWANEGO PROCESU SPAWANIA Streszczenie:
Dr inż. Wojciech KACZMAREK Dr inż. Jarosław PANASIUK Inż. Łukasz MINDA Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.250 PROJEKT INTERFEJSU OPERATORA DLA ZROBOTYZOWANEGO PROCESU SPAWANIA Streszczenie:
IRB PODSUMOWANIE:
 IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
STANOWISKO ZROBOTYZOWANE DUAL AIR LIQUIDE WELDING
 AIR LIQUIDE WELDING POLSKA Sp. z o.o. 40 246 Katowice ul. Porcelanowa 10 NIP:945 17 19 850 REGON :351321488 Tel : ( + 48 32) 609 04 56 Fax: ( + 48 32) 609 04 60 e-mail : jerzy.szwengruben@airliquide.com
AIR LIQUIDE WELDING POLSKA Sp. z o.o. 40 246 Katowice ul. Porcelanowa 10 NIP:945 17 19 850 REGON :351321488 Tel : ( + 48 32) 609 04 56 Fax: ( + 48 32) 609 04 60 e-mail : jerzy.szwengruben@airliquide.com
Teoria sprężystości i plastyczności 1W E (6 ECTS) Modelowanie i symulacja ruchu maszyn i mechanizmów 1L (3 ECTS)
 Modelowanie i symulacja ruchu maszyn i mechanizmów 1L (3 ECTS)") Kierunek : MECHANIKA I BUDOWA MASZYN. Studia niestacjonarne II-go stopnia, specjalność KOMPUTEROWE PROJEKTOWANIE MASZYN I URZĄDZEŃ godzin Analiza wytrzymałościowa elementów konstrukcji W E, C ( ECTS) Symulacje
Kierunek : MECHANIKA I BUDOWA MASZYN. Studia niestacjonarne II-go stopnia, specjalność KOMPUTEROWE PROJEKTOWANIE MASZYN I URZĄDZEŃ godzin Analiza wytrzymałościowa elementów konstrukcji W E, C ( ECTS) Symulacje
FORMULARZ OFERTOWY
 Załącznik nr 1 do Zapytania ofertowego nr 1-2017... (nazwa i adres)... (miejscowość i data)... (telefon, fax)... (adres e-mail) FORMULARZ OFERTOWY 1-2017 W odpowiedzi na Zapytanie ofertowe nr 1-2017 z
Załącznik nr 1 do Zapytania ofertowego nr 1-2017... (nazwa i adres)... (miejscowość i data)... (telefon, fax)... (adres e-mail) FORMULARZ OFERTOWY 1-2017 W odpowiedzi na Zapytanie ofertowe nr 1-2017 z
System zdalnego projektowania produktu i technologii wyrobów wariantowych w systemie CAD/CAM
 System zdalnego projektowania produktu i technologii wyrobów wariantowych w systemie CAD/CAM Autorzy: prof. dr hab. inż. Zenobia Weiss, Politechnika Poznańska prof. dr hab. inż. Adam Hamrol, Politechnika
System zdalnego projektowania produktu i technologii wyrobów wariantowych w systemie CAD/CAM Autorzy: prof. dr hab. inż. Zenobia Weiss, Politechnika Poznańska prof. dr hab. inż. Adam Hamrol, Politechnika
Automatyzacja wytwarzania - opis przedmiotu
 Automatyzacja wytwarzania - opis przedmiotu Informacje ogólne Nazwa przedmiotu Automatyzacja wytwarzania Kod przedmiotu 06.1-WM-MiBM-D-08_15L_pNadGen471N7 Wydział Kierunek Wydział Mechaniczny Mechanika
Automatyzacja wytwarzania - opis przedmiotu Informacje ogólne Nazwa przedmiotu Automatyzacja wytwarzania Kod przedmiotu 06.1-WM-MiBM-D-08_15L_pNadGen471N7 Wydział Kierunek Wydział Mechaniczny Mechanika
Bezpieczeństwo pracy z robotem przemysłowym. Gliwice 2007
 ABC Control - robotyka robotyzacja automatyka roboty abb fanuc kuka Gliwice 2007 Spis treści 1. Zapewnienie bezpieczeństwa pracownikom oraz wyposażeniu...2 2.Wykonywanie regularnych przeglądów robota,
ABC Control - robotyka robotyzacja automatyka roboty abb fanuc kuka Gliwice 2007 Spis treści 1. Zapewnienie bezpieczeństwa pracownikom oraz wyposażeniu...2 2.Wykonywanie regularnych przeglądów robota,
Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek
 ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI LABORATORIUM AUTOMATYZACJI PROCESOW PRODUKCYJNYCH Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek 1. Cel ćwiczenia Rzeszów 2008 Celem ćwiczenia
ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI LABORATORIUM AUTOMATYZACJI PROCESOW PRODUKCYJNYCH Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek 1. Cel ćwiczenia Rzeszów 2008 Celem ćwiczenia
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
1. Prace rozwojowe usługi informatyczne w zakresie opracowania prototypu oprogramowania serwisowo-instalatorskiego dla systemu testowego
 Projekt współfinansowany z Europejskiego Funduszu Rozwoju Regionalnego oraz Budżetu Państwa FUNDUSZE EUROPEJSKIE DLA ROZWOJU REGIONU ŁÓDZKIEGO Zamawiający: KAWU J. Kotus A. Woźniak Spółka Jawna 91-204
Projekt współfinansowany z Europejskiego Funduszu Rozwoju Regionalnego oraz Budżetu Państwa FUNDUSZE EUROPEJSKIE DLA ROZWOJU REGIONU ŁÓDZKIEGO Zamawiający: KAWU J. Kotus A. Woźniak Spółka Jawna 91-204