Mikrokontroler Motorola M68HC05. Technika mikroprocesorowa dr inż. Wiesław Madej
|
|
|
- Tadeusz Dobrowolski
- 9 lat temu
- Przeglądów:
Transkrypt

1 Mikrokontroler Motorola M68HC0 Technika mikroprocesorowa dr inż. Wiesław Madej

2 Mikrokontroler MC68HC0 jest pełnym systemem komputerowym mieszczącym się w pojedynczym układzie scalonym. W większości zastosowań aplikacji sterujących może funkcjonować bez dodatkowych układów zewnętrznych. W związku z tym zmniejszają się koszty produkcji, co przyczynia się do wysokiego stopnia elastyczności, umożliwia to wyprodukowanie układów z przeznaczeniem do prostych zastosowań inżynierskich. Nowe właściwości mikrokontrolerów MC68HC0 znajdują zastosowanie u wielu doświadczonych inżynierów, którzy potrzebują rodziny układów z funkcjami i aplikacjami zgodnymi ze starszymi modelami mikrokontrolerów firmy Motorola. Technologia HCMOS wykorzystana w tych mikrokontrolerach charakteryzuje się małymi wymiarami, dużą szybkością działania i małym poborem mocy oraz wysoką odpornością układów CMOS. Mikrokontrolery MC68HC0 mogą być sterowane przez różne częstotliwości zegara od jak najmniejszych wartości po wartości maksymalne. Ta właściwość może być wykorzystana przy zmniejszeniu poboru mocy w układach pracujących na wysokich częstotliwościach zegara. Układ posiada dwa kontrolery programowe zarządzające zmniejszeniem poboru mocy WAIT i STOP. Moduły te mogą być atrakcyjne dla aplikacji zarządzających energią.

3 Wybrane cechy mikrokontrolera MC68HC0: - mały koszt produkcji, wykonanie w technologii HCMOS, - mikrokontroler oparty o architekturę 8-bitową, - dwa tryby zarządzanie energią, - 2 linie dwukierunkowe I/O, - 7 linii pracujących w trybie odczytu, - dwa wyprowadzenia czasowe, - częstotliwość operacyjna 2 MHz przy V; 1 MHz przy V, - 16 bitowy licznik, - szeregowy, asynchroniczny i synchroniczny interfejs komunikacyjny, - jednorazowa pamięć ROM lub kasowalna pamięć promieniami UV, - wybieralna konfiguracja pamięci, - układ kontroli WATCHDOG, - oscylator wewnątrz układu, bajtów wewnętrznej pamięci programu, - 6 bajtowy obszar pamięci RAM, - programy kompatybilne z procesorami rodziny CMOS M1680, - możliwość zmiany poszczególnych bitów, - mapowanie portów I/O jako pamięć,

4

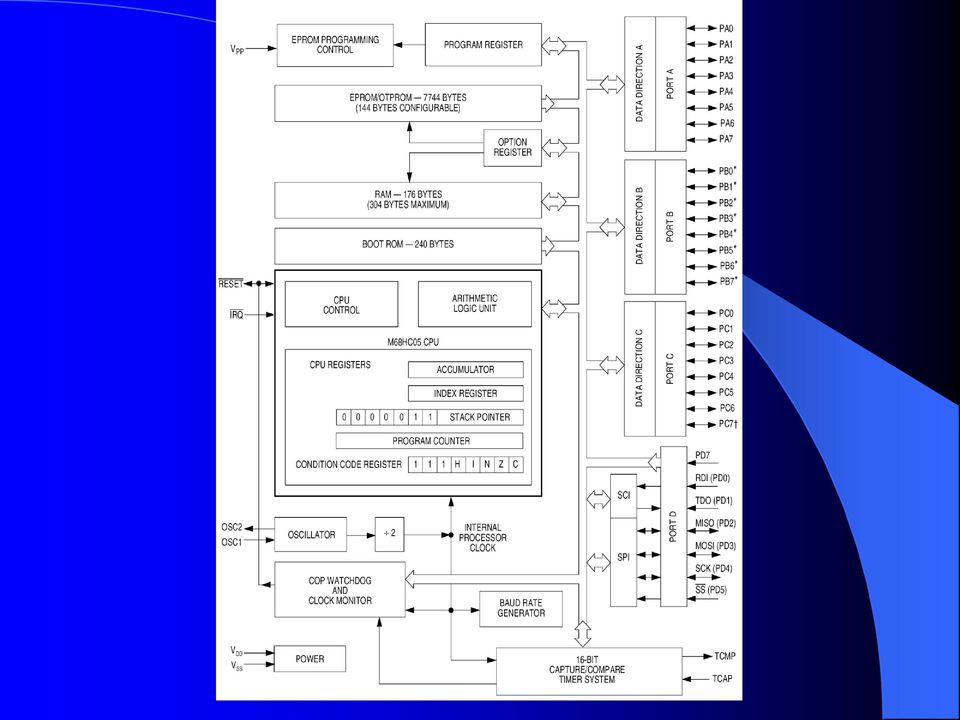
5 Jednostka centralna mikrokontrolera, składa się z 8-bitowego bloku arytmetyczno-logicznego: akumulatora, rejestru indeksowego, licznika rozkazów, wskaźnika stosu, układu sterowania CPU. W mikrokontrolerze MC68HC0 znajdują się pamięci: stała ROM (EPROM lub OTPROM) i pamięć operacyjna RAM. Do wyprowadzeń układu dołączone są porty wejścia wyjścia, asynchroniczny interfejs komunikacyjny SCI, porty separowane SPI, 16 bitowy wewnętrzny programowalny licznik czasowy. Układ ma możliwość samokontroli przeciwko błędom systemowym, dlatego posiada układ WATCHDOG zabezpieczający przed błędami programowymi. Monitor zegara generuje sygnał do systemu o wznowienie pracy, jeśli system się zagubił lub chodzi za wolno. Przy wykrytym niewłaściwy kodzie wysyła nie maskowane przerwanie.

6

7

8
9 Piny i wyprowadzenia Ponieważ mikrokontroler MC68HC070 jest wykonany w technologii CMOS, nieużywane końcówki mogą być źródłem przypadkowych oscylacji na tych wyprowadzeniach. Preferowaną metodą eliminacji zakłóceń jest podłączenie do tych końcówek stanów wysokich lub niskich. V DD i V SS Zasilanie procesora jest podawane przez te dwa wyprowadzenia, z czego na wyprowadzenie V DD jest podawane napięcie dodatnie, a wyprowadzenie V SS jest dołączone do masy zasilania. Mikrokontroler może być zasilany pojedynczym napięciem +V.

10 V PP Wyprowadzenie V PP jest używane do jednorazowego programowania pamięci ROM, OTPROM, EPROM. Napięcie programowania wynosi 1,7 V DC i jest akceptowane przy programowaniu pamięci. Normalnie pin (końcówka) ten jest podłączony do V DD. Zabrania się podłączania tego pinu do zasilania V SS, gdyż grozi to uszkodzeniem układu. IRQ Jest to wyprowadzenie przyjmujące zewnętrzny sygnał przerwania zgłoszony na to wejście. Zewnętrzne przerwanie jest nieobsługiwane, gdy w rejestrze CCR bit I jest ustawiony na 1, ale sygnał zgłoszenia przerwania jest zapamiętany w zatrzasku wejściowym tego wyprowadzenia. RESET Wejście to jest aktywowane stanem logicznym "0", pozwala ręcznie wyzerować cały układ. Zewnętrzny obwód RC może być podłączony do końcówki generującej sygnał reset. W chwili włączenia zasilania (ang. power- on- reset ), system opóźnia start o 06 cykle, aby obwód oscylatora mógł się ustabilizować.

11 OSC1, OSC2 Mikrokontroler MC68HC0 ma możliwość dołączenia do wyprowadzeń układu kilku rodzajów źródeł częstotliwości. Istnieje możliwość korzystania z zewnętrznego źródła częstotliwości. Częstotliwość zegara procesora jest otrzymywana przez podział częstotliwości oscylatora na dwa. Wewnętrzny oscylator jest zaprojektowany jako wejście do podłączenia równoległego rezonatora kwarcowego lub ceramicznego o maksymalnej częstotliwości MHz. Kryształ i jego komponenty powinny znajdować się jak najbliżej układu w celu eliminacji pojemności pasożytniczych. W przypadku dołączenia zewnętrznego zegara należy podłączyć go do wyjścia OSC1, a wyprowadzenie OSC2 pozostawić nie podłączone. PA7-PA0, PB7-PB0, PC7-PC0 Wyprowadzenia PA7-PA0, PB7-PB0, PC7-PC0 tworzą porty A, B i C. Są to ośmioliniowe wejścia- wyjścia ogólnego przeznaczenia. Każda linia portu może być ustawiona programowo jako wejście lub wyjście, w zależności od wpisanych wartości w rejestrach DDRA, DDRB, DDRC.

12 PD-PD0, PD7 Wyprowadzenia PD7, PD-PD0 tworzą port D. Port ten jest mapowany w mapie pamięci i jest on ustawiony jako wejście tylko do odczytu, może też być wykorzystany jako szeregowy port komunikacyjny synchroniczny i asynchroniczny. TCAP, TCMP Wyprowadzenie oznaczone jako TCAP jest wejściem sygnałowym zgłaszającym żądanie obsługi licznika wejściowego. Wyjście układu oznaczone jako TCMP jest wyprowadzeniem sygnałowym komparatora porównującego zawartość rejestrów OCR z aktualną wartością licznika. W chwili wystąpienia zgodności zawartości wyżej wymienionych rejestrów może zostać wystawiony stan logiczny na końcówce TCMP.

13 Moc obliczeniowa komputerów jest zależna do dostępu pamięci. Tryby adresacji procesora definiują, w jaki sposób dane zostaną dostarczone do procesora. Z powodu różnych trybów adresacji instrukcje mogą mieć różny dostęp do operandów. Mikrokontrolery MC68HC0 posiadają 62 instrukcje podstawowe; z czego każda instrukcja wymaga kodu operacji. W zależności od trybu adresacji mamy 210 odrębnych kodów operacji. Mikrokontroler MC68HC0 używa 6 trybów adresacji przy odwoływaniu się do pamięci. Tryby adresowania: - rejestrowe, - natychmiastowe, - bezpośrednie strony 0, - rozszerzone, - indeksowe (bez osetu), - indeksowe (z 8-bitowym osetem), - indeksowe (z 16-bitowym osetem), - względne. W podstawowej wersji tego mikrokontrolera wszystkie zmienne programu i rejestry wejściawyjścia mieszczą się w pamięci pod adresem $0000 do $00FF, także używa się bezpośredniego trybu adresacji.
, - indeksowe (z 8-bitowym osetem), - indeksowe (z 16-bitowym osetem), - względne.")
14 Tryb Adresowania Skrót Argument Rejestrowe brak Natychmiastowe IMM ii Bezpośrednie strony 0 (Z testem bitu) rr Rozszerzone EXT hh ll Indeksowe (bez osetu) brak Indeksowe (z 8-bitowym osetem) 1 Indeksowe (z 16-bitowym osetem) 2 ee Względne REL rr ee ii hh ll rr wartość 8-bitowa dla pierwszych 26 komórek z przedziału od $0000 do $00FF. starsza 8-bitowa wartość adresu 16-bitowego. młodsza 8-bitowa wartość adresu 16-bitowego lub adres 8-bitowy. wartość 8-bitowa przy adresowaniu bezpośrednim. starsza 8-bitowa wartość adresu 16-bitowego adresowania rozszerzonego. młodsza 8-bitowa wartość adresu 16-bitowego adresowania rozszerzonego. wartość 8-bitowa adresu względnego.

15

16 Tabela 2..2 Określenie kierunku przesyłania danych przez Port A. R/ W DD Rn Działanie MCU zapis do/odczyt z bitu danych 0 0 Pin I/O jest w trybie wejścia. Dane są zapisane do bufora wyjściowego. 0 1 Dana jest zapisana do bufora wyjściowego i jest wystawiana napini/o. 1 0 Zawartość pinui/o jest odczytywana. 1 1 Pin I/O jest w trybie wyjścia. Dane z bufora wyjściowego są odczytywane

17

18

19 Do napisania programu możemy użyć dowolnego edytora tekstu np. posłużyć się notatnikiem. Pisząc program należy pamiętać jak jest zbudowana linia asemblera. Pola linii są ozielone znakami białymi (spacja, tabulacja). Wewnątrz pola znaki te nie występują. Linia programu zawiera cztery pola, kolumny, z których niektóre z nich mogą zostać puste: etykieta, mnemonik, operand i komentarz. Wartość może występować jako symbol, stała, lub znak '*'. Operatory. Oznaczenia stosowane przy pisaniu programu: # wartość (adresowanie natychmiastowe) + dodawanie - odejmowanie * mnożenie funkcja EX-OR

20 Stała może być zapisana w kodzie asemblera na pięć różnych formatów: decymalnie, binarnie, heksadecymalnie, oktalnie, lub jako znak ASCII. Programista określa wartość w jakim formacie jest podana za pomocą następujących przedrostków:! DZIESIĘTNIE $ HEKSADECYMALNIE % ' OKTALNIE ASCII!27 lub 27T = zapis liczby 27 dziesiętnie $27 lub 27H = zapis liczby 9 heksadecymalnie % = zapis liczby 10 binarnie Asembler konwertuje wszystkie stałe na format binarny kodu maszynowego i wyświetla stałe w listingu asemblera w postaci heksadecymalnej. Bez przedrostka są zapisywane wartości dziesiętnie.

21 DSEG AT - określa adres początku segmentu danych w pamięci programu. Oznaczenia dyrektyw stosowane przy pisaniu programu: * - linia komentarza ignorowana przez kompilator ; - znaki za znakiem są traktowane jako komentarz CSEG AT - określa adres początku segmentu rozkazów w pamięci programu. DB - umieszcza w kodzie programu jedną lub ciąg 8-bitowych danych. Wymienione w ciągu dane zostaną umieszczone w tej samej kolejności w pamięci programu bajt po bajcie. DS - rezerwuje wyspecyfikowaną ilość bajtów w pamięci programu. Rozmiar segmentu danych jest wyrażeniem, na które mogą składać się liczby, wcześniej deklarowane stałe lub kody znaków ujętych w cudzysłów. Nazwie stałej zostaje przypisany adres początku segmentu danych. Wystąpienie etykiety nie jest wymagane.
22 DW - umieszcza w kodzie programu jedną lub ciąg 16-bitowych danych. Wymienione w ciągu dane zostaną umieszczone w tej samej kolejności w pamięci programu słowo po słowie. Elementami ciągu mogą być liczby, stałe lub kody znaków ujętych w cudzysłów. Po ostatnim elemencie ciągu nie powinno być przecinka. Wystąpienie etykiety nie jest wymagane. END - kończy zapis tekstu programu, wszystkie występujące po niej znaki i rozkazy są ignorowane. ENDM - kończy zapis makroinstrukcji. Każde wywołanie nazwy makroinstrukcji powoduje wstawienie kodu rozkazów w niej umieszczonych. Wywołanie makroinstrukcji może wystąpić dopiero po jej deklaracji. EQU - służy do deklarowania nazw stałych. $INCLUDE - włącza do tekstu programu wyspecyfikowany plik. MACRO - rozpoczyna zapis makroinstrukcji. ORG - określa adres początku segmentu rozkazów lub danych w pamięci programu.
23 Przykładowe programy: Pierwszy z przykładowych programów wykorzystuje przełączniki SW i wyświetlacz siedmiosegmentowy. Program odczytuje stan przełączników i wyświetla jakie pozycje zostały włączone. Nie jest to zbytnio czytelne, ale w trakcie pracy zmieniając ustawienia przełączników zmieniają nam się zapalane segmenty na wyświetlaczu. Programem realizującym tą funkcję jest program inout.asm. Wykorzystując mikrokontroler MC68HC0 należy określić kierunek pracy portów A i B, oraz określić, w którym miejscu pamięci ma się znajdować kod programu. START Port A=we Port B=wy A Port A INV A Port B A
24 ****************************************************************************** *Program 1 INOUT.asm odczytuje wartość z przełączników (Port A) * *i wyświetla na wyświetlaczu LED (Port B) * *Na module JP2 zwarty, JP opcja, JP masa, JP6 Zasianie * ****************************************************************************** *Definicja Adresów Portów* PORTA EQU 0 ;Port A (dołączone są przełączniki) PORTB EQU 1 ;Port B (dołączone wyświetlacze Led) DDRA EQU ;Rejestr konfigurujący rodzaju pracy portu A DDRB EQU ;Rejestr konfigurujący rodzaju pracy portu B ORG $20 ;Wskazanie miejsca początku programu w pamięci START: LDA #0 ;Zapisz wartość 0 do akumulatora A STA DDRA ;Zapisz wartość z Akumulatora do DDRA ;Zostaje skonfigurowany Port A do odczytu LDA #$FF ;Zapisz wartość 0 do akumulatora A STA DDRB ;Zapisz wartość z Akumulatora do DDRB ;Zostaje skonfigurowany Port B jako tylko do zapisu LOOP: LDA PORTA ;Odczytaj wartość z Portu A i zapisz do Ak. A COMA ;Dokonuje inwersji wszystkich bitów w Ak. A STA PORTB ;Zapisz wartość z Akumulatora A do portu B BRA LOOP ;Skocz do etykiety LOOP END
25 Program - adresowanie indeksowe Program odczytuje binarną wartość na przełączniku i zamienia ją na wartość wyświetlacza siedmiosegmentowego. Jest to wartość o wiele bardziej czytelna niż wyniki prezentowane w poprzednim programie. W układzie jest jeden wyświetlacz siedmiosegmentowy i może wyświetlić wartości heksadecymalnie od 0 do F. Z przełącznika będziemy uwzględniać wartość tylko z czterech linii. Program możemy podzielić na dwie części: pierwsza odczytująca wartość z przełącznika, a druga dekodująca z kodu binarnego na siedmiosegmentowy z wykorzystaniem adresowania indeksowego. W celu odrzucenia starszej części portu A użyjemy iloczynu logicznego AND z maską bitów $0F. Chcąc dokonać dekodowania kodu binarnego na siedmiosegmentowy najlepiej użyć 16 bajtów pamięci podając wartości odpowiadające danym wartościom w kolejności od 0 do F. W momencie pobrania wartości należy jedynie dodać wartość początku tablicy z kodami i pobrać ją, następnie wystawić na port B, gdzie jest wyświetlacz. Do tego celu znakomicie można wykorzystać adresowanie indeksowe.
26 START A Port A A AND 0Fh X A Port B A Algorytm programu SEVENSEG.ASM
27 *Program SEVENSEG.ASM odczytuje młodsze linie przełącznika A * * i zapala zdekodowaną informację na wyświetlaczu LED na porcie B * * Uses indexed aressing mode to access segment codes * * Hardware JP2 Optional, JP In, JP ground, JP6 Vcc * ************************************************************************ PORTA EQU 0 ;Definiuje adresy dla portu A i B PORTB EQU 1 DDRA EQU ;Określenie kierunków pracy portów DDRB EQU * * org $20 ;początek programu w pamięci START: lda #$0 ; ustaw Port A sta DDRA ; jako wejście lda #$FF ; ustaw port B sta DDRB ; jako wyjście LOOP: lda PORTA ; odczyt klawiszy and #$0F ; wyzeruj starsze bity tax ; zapisz do X młodsze bity portu A lda LIST,X ; odczytaj kod znaku LED z LIST sta PORTB ; wystaw wartość zdekodowaną na port B bra LOOP ; Powrót do LOOP * * Kody dla wyświetlacza 7 segmentowego, 0 zapala segment * LIST: fcb % ,% ,% ,% ; '0', '1', '2', '' fcb % ,% ,% ,% ;'', '', '6', '7 fcb fcb % ,% ,% ,% ; '8', '9', 'A', 'b' % ,% ,% ,% ;'C', 'd', 'E', 'F
28 MC 68HC0 OBSŁUGA GŁOŚNICZKA
29 *Definicja Adresów Portów* PORTC EQU 2 ;Port C (dołączony głośniczek) DDRC EQU 6 ;Rejestr konfigurujący rodzaju pracy portu C OPOZN EQU $0 ORG $20 ;Wskazanie miejsca początku programu w pamięci START: LDA #$FF LOOP: STA DDRC ;Zapisz wartość z Akumulatora do DDRC LDA #1 ;wpisz do Ak. A wartość 1 sta PORTC LDA OPOZN P1: DECA BNE P1 ;wpisz opóźnienie do A LDA #0 ;wpisz do Ak. A wartość 1 sta PORTC LDA OPOZN P2: DECA BNE P2 ;wpisz opóźnienie do A BRA LOOP ;Skocz do etykiety LOOP END
30 Skrócona lista rozkazów mikrokontrolera MC68HC0 Mnemonik Operacja Deskrypcja ADC opr. Dodawanie, uwzględnia znak przeniesienia (dodaje), dodawanie liczb > niż 8 bit. A (A) + (M) + C Typ. Adres. IMM EXT 2 1 Kod Znaczniki Maszynowy Cyk. Kod Arg. H I N Z C A9 B9 C9 D9 E9 F9 ii hh ll ee 2 - ADD opr. Dodawanie bez przeniesienia do akumulatora A (A) + (M) IMM EXT 2 1 AB BB CB DB EB FB ii hh ll ee 2 - AND opr. Iloczyn logiczny (akum. *komórka pamięci) A (A) (M) IMM EXT 2 1 A B C D E F ii hh ll ee ASL opr. ASLA ASLX ASL opr. ASL opr. Arytmetyczne przesunięcie w lewo C b7 b0 0 INK l ASR opr. ASRA ASRX ASR opr. ASR opr. Arytmetyczne przesunięcie w prawo b7 b0 C
31 BCC rel. Skocz, gdy C = 0? C = 0 REL 2 rr BCLR n,opr. Zeruj bit w pamięci. Mn 0 b0 bl b2 b b b b6 b B 1D 1F BCS rel. Skocz, gdy C =1? C = 1 REL 2 rr BEQ rel. Skocz, gdy Z =1? Z = 1 REL 27 rr BHCC rel. Skocz, gdy H = 0? H = 0 REL 28 rr BHCS rel. Skocz, gdy H = 1? H = 1 REL 29 rr BHI rel. Skocz, gdy C=0 i Z=0? C+Z = 0 REL 22 rr BHS rel. Skocz, gdy większy, równy? C = 0 REL 2 rr BIH rel. Skocz, gdy IRQ Pin =1? IRQ Stan wysoki REL 2F rr BIL rel. Skocz, gdy IRQ Pin = 0? IRQ Stan niski REL 2E rr
32 BIT opr. Testuj A z pamięcią (A) (M) IMM EXT 2 1 A B C D E F ii hh ll ee BLO rel. Skocz, gdy mniejszy? C = 1 REL 2 rr BLS rel. Skocz, gdy mniejszy, równy? C+Z= 1 REL 2 rr BMC rel. Skocz, gdy I = 0? I = 0 REL 2C rr BMI rel. Skocz, gdy ujemne? N= 1 REL 2B rr BMS rel. Skocz, gdy I = 1? I = 1 REL 2D rr BNE rel. Skocz, gdy różny? Z = 0 REL 26 rr BPL rel. Skocz, gdy dodatnie? N = 0 REL 2A rr BRA rel. Skocz zawsze? 1 = 1 (zawsze prawda) REL 20 rr BRCLR n,opr,rel. Skocz, gdy bit n w M=0? Bit n of M = 0 b0 bl b2 b b b b6 b B 0D 0F rr rr rr rr rr rr rr rr
33 BRN rel. Nie skacz? 1 = 0 (never true) REL 21 rr BRSET n,opr,rel. Skocz, gdy bit n w M=l?Bit n of M = l b0 bl b2 b b b b6 b A 0C 0E rr rr rr rr rr rr rr rr BSET n,opr. Ustaw bit n w pamięci M Mn l b0 bl b2 b b b b6 b A 1C 1E BSR rel. Skocz do podprogramu PC (PC)+2 push (PCL); SP=SP-1 push (PCH); SP=SP-1 REL AD rr PC (PC)+REL CLC Zeruj bit przeniesienia C C CLI Zeruj bit maski przerwania I 0 9A
34 CLR opr. CLRA CLRX CLR opr. CLR opr. Zeruj M 00 A 00 X 00 M 00 M 00 1 F F F 6F 7F CMP opr. Porównaj A z daną M (A) - (M) IMM EXT 2 1 A1 B1 C1 D1 E1 F1 ii hh ll ee COM opr. COMA COMX COM opr. COM opr. Neguj poszczególne bity M M = $FF - (M) A A X X M M M M CPX opr. Porównaj rejestr X z daną M (X) - (M) IMM EXT 2 1 A B C D E F ii hh ll ee 2 - -
35 DEC opr. DECA DECX DEC opr. DEC opr. Zmniejsz o 1 M (M) - 1 A (A) - 1 X (X) - 1 M (M) - 1 M (M) A A A 6A 7A EOR opr. Suma modulo 2 A z pamięcią A (A) (M) IMM EXT 2 1 A8 B8 C8 D8 E8 F8 ii hh ll ee INC opr. INCA INCX INC opr. INC opr. Zwiększ o 1 M (M) + 1 A (A) + 1 X (X) + 1 M (M) + 1 M (M) C C C 6C 7C JMP opr. Skok w dowolne miejsce programu PC Adres Efektywny EXT 2 1 BC CC DC EC FC hh ll ee JSR opr. Skocz do podprogramu PC PC+n (n = l, 2, or ) push (PCL); SP SP-1 push (PCH); SP SP-1 PC Adres Efektywny EXT 2 1 BD CD DD ED FD hh ll ee
36 LDA opr. Zapisz do akumulatora A (M) IMM EXT 2 1 A6 B6 C6 D6 E6 F6 ii hh ll ee LDX opr. Zapisz do rejestru indeksowego X (M) IMM EXT 2 1 AE BE CE DE EE FE ii hh ll ee LSL opr. LSLA LSLX LSL opr. LSL opr. Logiczne przesunięcie w lewo C b7 b0 0 X LSR opr. LSRA LSRX LSR opr. LSR opr. Logiczne przesunięcie w prawo 0 b7 b0 C A A
37 MUL Pomnóż X:A (X) x (A) NEC opr. NEGA NEGX NEG opr. NEG opr. Zanegowanie (zmiana znaku + na i odwrotnie) M -(M) = $00 - (M) A -(A) X -(X) M -(M) M -(M) NOP Nic nie rób 9D ORA opr. Suma logiczna OR z daną A (A) + (M) IMM EXT 2 1 AA BA CA DA EA FA ii hh ll ee ROL opr. ROLA ROLX ROL opr. ROL opr. Obrót w lewo przez C w kierunku starszych bitów C b7 b0 C ROR opr. RORA RORX ROR opr. ROR opr. Obrót w prawo przez C w kierunku młodszych bitów C b7 b0 C RSP Resetuj wskaźnik stosu SP $00FF 9C
38 RTI RTS SBC opr. Powrót z obsługi przerwania zarówno z programowego i sprzętowego Powrót z podprogramu Odejmowanie z uwzględnieniem przeniesienia SP = SP+l; pull(ccr) SP = SP+l; pull(a) SP = SP+l; pull(x) SP = SP+l; pull(pch) SP = SP+l; pull(pcl) SP = SP+l; pull(pch) SP = SP+1; pull(pcl) A (A) - (M) C 80 9 (ze stosu) IMM XT 2 1 A2 B2 C2 D2 E2 F2 ii hh ll ee SEC Ustaw bit przeniesienia C C SEI Ustaw bit maski przerwania I 1 9B B7 STA opr. EXT C7 hh ll Zapisz akumulator A do M (A) 2 D7 ee 6 komórki pamięci 1 E F7 STOP Aktywne IRQ ;Stop Oscyl. 8E
39 STX opr. SUB opr. SWI Zapisz rejestr X do pamięci M (X) Odejmowanie bez uwzględnienia przeniesienia Wywołanie przerwania programowego z poziomu programu A (A) - (M) PC PC+1 Push PCL; SP=SP-1 push PCH; SP=SP-1 push X; SP=SP-1 push A; SP=SP-1 push CCR; SP=SP-1 I Bit 1 PCH ($xxfc)(vector PCL ($xxfd) fetch) EXT 2 1 IMM EXT 2 1 BF CF DF EF FF A0 B0 C0 D0 E0 F0 hh ll ee ii hh ll ee TAX Przeniesienie A do X X (A) TST opr. D Testowanie wartości TSTA D akumulatora lub wartości TSTX (M) 0 D - - pamięci dla negacji lub zera, - TST opr. 1 6D wpływa tylko na znaczniki TST opr. 7D TXA Przeniesienie X do A A (X) 9F WAIT Oczekiwanie na przerwanie 8F
40 Mikrokontroler Motorola MC68HC0 Dziękuję za uwagę!
Budowa linii asemblera
 Budowa linii asemblera Pola w linii s a oddzielone znakami białymi (spacje, tabulacje). Wewn atrz pola znaki te nie wystepuj a. Linia programu zawiera cztery pola (być może puste): etykieta mnemonik operand
Budowa linii asemblera Pola w linii s a oddzielone znakami białymi (spacje, tabulacje). Wewn atrz pola znaki te nie wystepuj a. Linia programu zawiera cztery pola (być może puste): etykieta mnemonik operand
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Wstęp Architektura mikrokontrolerów 68HC08
 3 Wstęp...10 1. Architektura mikrokontrolerów 68HC08...13 1.1. Architektura... 14 1.1.1. CPU: rdzeń 68HC08...14 1.1.1.1. Model 68HC08 dla programisty... 14 1.1.1.2. Podstawy: przeniesienie i przepełnienie...
3 Wstęp...10 1. Architektura mikrokontrolerów 68HC08...13 1.1. Architektura... 14 1.1.1. CPU: rdzeń 68HC08...14 1.1.1.1. Model 68HC08 dla programisty... 14 1.1.1.2. Podstawy: przeniesienie i przepełnienie...
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2
 Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Technika mikroprocesorowa I Wykład 2
 Technika mikroprocesorowa I Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci, -odczyt-zapis urządzenia we-wy,
Technika mikroprocesorowa I Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci, -odczyt-zapis urządzenia we-wy,
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Architektura systemów komputerowych Laboratorium 14 Symulator SMS32 Implementacja algorytmów
 Marcin Stępniak Architektura systemów komputerowych Laboratorium 14 Symulator SMS32 Implementacja algorytmów 1. Informacje Poniższe laboratoria zawierają podsumowanie najważniejszych informacji na temat
Marcin Stępniak Architektura systemów komputerowych Laboratorium 14 Symulator SMS32 Implementacja algorytmów 1. Informacje Poniższe laboratoria zawierają podsumowanie najważniejszych informacji na temat
MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW
 MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW Projektowanie urządzeń cyfrowych przy użyciu układów TTL polegało na opracowaniu algorytmu i odpowiednim doborze i zestawieniu układów realizujących różnorodne funkcje
MOŻLIWOŚCI PROGRAMOWE MIKROPROCESORÓW Projektowanie urządzeń cyfrowych przy użyciu układów TTL polegało na opracowaniu algorytmu i odpowiednim doborze i zestawieniu układów realizujących różnorodne funkcje
Architektura komputerów. Asembler procesorów rodziny x86
 Architektura komputerów Asembler procesorów rodziny x86 Architektura komputerów Asembler procesorów rodziny x86 Rozkazy mikroprocesora Rozkazy mikroprocesora 8086 można podzielić na siedem funkcjonalnych
Architektura komputerów Asembler procesorów rodziny x86 Architektura komputerów Asembler procesorów rodziny x86 Rozkazy mikroprocesora Rozkazy mikroprocesora 8086 można podzielić na siedem funkcjonalnych
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Architektura komputerów
 Architektura komputerów Wykład 3 Jan Kazimirski 1 Podstawowe elementy komputera. Procesor (CPU) 2 Plan wykładu Podstawowe komponenty komputera Procesor CPU Cykl rozkazowy Typy instrukcji Stos Tryby adresowania
Architektura komputerów Wykład 3 Jan Kazimirski 1 Podstawowe elementy komputera. Procesor (CPU) 2 Plan wykładu Podstawowe komponenty komputera Procesor CPU Cykl rozkazowy Typy instrukcji Stos Tryby adresowania
Mikrokontroler ATmega32. Język symboliczny
 Mikrokontroler ATmega32 Język symboliczny 1 Język symboliczny (asembler) jest językiem niskiego poziomu - pozwala pisać programy złożone z instrukcji procesora. Kody instrukcji są reprezentowane nazwami
Mikrokontroler ATmega32 Język symboliczny 1 Język symboliczny (asembler) jest językiem niskiego poziomu - pozwala pisać programy złożone z instrukcji procesora. Kody instrukcji są reprezentowane nazwami
Struktura i działanie jednostki centralnej
 Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
CPU ROM, RAM. Rejestry procesora. We/Wy. Cezary Bolek Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki
 Cezary Bolek Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki Komputer jest urządzeniem, którego działanie opiera się na wykonywaniu przez procesor instrukcji pobieranych z pamięci operacyjnej
Cezary Bolek Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki Komputer jest urządzeniem, którego działanie opiera się na wykonywaniu przez procesor instrukcji pobieranych z pamięci operacyjnej
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Przykładowe pytania DSP 1
 Przykładowe pytania SP Przykładowe pytania Systemy liczbowe. Przedstawić liczby; -, - w kodzie binarnym i hexadecymalnym uzupełnionym do dwóch (liczba 6 bitowa).. odać dwie liczby binarne w kodzie U +..
Przykładowe pytania SP Przykładowe pytania Systemy liczbowe. Przedstawić liczby; -, - w kodzie binarnym i hexadecymalnym uzupełnionym do dwóch (liczba 6 bitowa).. odać dwie liczby binarne w kodzie U +..
Organizacja typowego mikroprocesora
 Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Układ wykonawczy, instrukcje i adresowanie. Dariusz Chaberski
 Układ wykonawczy, instrukcje i adresowanie Dariusz Chaberski System mikroprocesorowy mikroprocesor C A D A D pamięć programu C BIOS dekoder adresów A C 1 C 2 C 3 A D pamięć danych C pamięć operacyjna karta
Układ wykonawczy, instrukcje i adresowanie Dariusz Chaberski System mikroprocesorowy mikroprocesor C A D A D pamięć programu C BIOS dekoder adresów A C 1 C 2 C 3 A D pamięć danych C pamięć operacyjna karta
SYSTEMY MIKROPROCESOROWE W AUTOMATYCE. Projekt bariery świetlnej.
 SYSTEMY MIKROPROCESOROWE W AUTOMATYCE. Projekt bariery świetlnej. Prowadzący: Dr M. Wnuk Wykonał: Marcin Kawalec 1. Wstęp. Zadaniem projektowym było zaprojektowanie i wykonanie bariery świetlnej. Układ
SYSTEMY MIKROPROCESOROWE W AUTOMATYCE. Projekt bariery świetlnej. Prowadzący: Dr M. Wnuk Wykonał: Marcin Kawalec 1. Wstęp. Zadaniem projektowym było zaprojektowanie i wykonanie bariery świetlnej. Układ
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
1. Wstęp Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE Rdzeń mikrokontrolerów ST7FLITE... 15
 3 1. Wstęp... 9 2. Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE... 11 3. Rdzeń mikrokontrolerów ST7FLITE... 15 3.1. Jednostka centralna...16 3.2. Organizacja i mapa pamięci...19 3.2.1. Pamięć RAM...20
3 1. Wstęp... 9 2. Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE... 11 3. Rdzeń mikrokontrolerów ST7FLITE... 15 3.1. Jednostka centralna...16 3.2. Organizacja i mapa pamięci...19 3.2.1. Pamięć RAM...20
Architektura komputerów. Komputer Procesor Mikroprocesor koncepcja Johna von Neumanna
 Architektura komputerów. Literatura: 1. Piotr Metzger, Anatomia PC, wyd. IX, Helion 2004 2. Scott Mueller, Rozbudowa i naprawa PC, wyd. XVIII, Helion 2009 3. Tomasz Kowalski, Urządzenia techniki komputerowej,
Architektura komputerów. Literatura: 1. Piotr Metzger, Anatomia PC, wyd. IX, Helion 2004 2. Scott Mueller, Rozbudowa i naprawa PC, wyd. XVIII, Helion 2009 3. Tomasz Kowalski, Urządzenia techniki komputerowej,
Programowanie w językach asemblera i C
 Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Lista rozkazów mikrokontrolera 8051
 Lista rozkazów mikrokontrolera 8051 Spis treści: Architektura mikrokontrolera Rozkazy Architektura mikrokontrolera Mikrokontroler 8051 posiada trzy typy pamięci: układ zawiera pamięć wewnętrzną (On-Chip
Lista rozkazów mikrokontrolera 8051 Spis treści: Architektura mikrokontrolera Rozkazy Architektura mikrokontrolera Mikrokontroler 8051 posiada trzy typy pamięci: układ zawiera pamięć wewnętrzną (On-Chip
CYKL ROZKAZOWY = 1 lub 2(4) cykle maszynowe
 cykle maszynowe") MIKROKONTROLER RODZINY MCS 5 Cykl rozkazowy mikrokontrolera rodziny MCS 5 Mikroprocesory rodziny MCS 5 zawierają wewnętrzny generator sygnałów zegarowych ustalający czas trwania cyklu zegarowego Częstotliwość
MIKROKONTROLER RODZINY MCS 5 Cykl rozkazowy mikrokontrolera rodziny MCS 5 Mikroprocesory rodziny MCS 5 zawierają wewnętrzny generator sygnałów zegarowych ustalający czas trwania cyklu zegarowego Częstotliwość
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
UTK Można stwierdzić, że wszystkie działania i operacje zachodzące w systemie są sterowane bądź inicjowane przez mikroprocesor.
 Zadaniem centralnej jednostki przetwarzającej CPU (ang. Central Processing Unit), oprócz przetwarzania informacji jest sterowanie pracą pozostałych układów systemu. W skład CPU wchodzą mikroprocesor oraz
Zadaniem centralnej jednostki przetwarzającej CPU (ang. Central Processing Unit), oprócz przetwarzania informacji jest sterowanie pracą pozostałych układów systemu. W skład CPU wchodzą mikroprocesor oraz
Opis procedur asemblera AVR
 Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
petla:... ; etykieta określa adres w pamięci kodu (docelowe miejsce skoku) DJNZ R7, petla
 DJNZ R7, petla") Asembler A51 1. Symbole Nazwy symboliczne Symbol jest nazwą, która może być użyta do reprezentowania wartości stałej numerycznej, wyrażenia, ciągu znaków (tekstu), adresu lub nazwy rejestru. Nazwy symboliczne
Asembler A51 1. Symbole Nazwy symboliczne Symbol jest nazwą, która może być użyta do reprezentowania wartości stałej numerycznej, wyrażenia, ciągu znaków (tekstu), adresu lub nazwy rejestru. Nazwy symboliczne
Techniki mikroprocesorowe i systemy wbudowane
 Techniki mikroprocesorowe i systemy wbudowane Wykład 1 Procesory rodziny AVR ATmega. Wstęp Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa im. Witelona w Legnicy Wydział
Techniki mikroprocesorowe i systemy wbudowane Wykład 1 Procesory rodziny AVR ATmega. Wstęp Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa im. Witelona w Legnicy Wydział
Architektura Systemów Komputerowych. Jednostka ALU Przestrzeń adresowa Tryby adresowania
 Architektura Systemów Komputerowych Jednostka ALU Przestrzeń adresowa Tryby adresowania 1 Jednostka arytmetyczno- logiczna ALU ALU ang: Arythmetic Logic Unit Argument A Argument B A B Ci Bit przeniesienia
Architektura Systemów Komputerowych Jednostka ALU Przestrzeń adresowa Tryby adresowania 1 Jednostka arytmetyczno- logiczna ALU ALU ang: Arythmetic Logic Unit Argument A Argument B A B Ci Bit przeniesienia
Ćwiczenie nr 3. Wyświetlanie i wczytywanie danych
 Ćwiczenie nr 3 Wyświetlanie i wczytywanie danych 3.1 Wstęp Współczesne komputery przetwarzają dane zakodowane za pomocą ciągów zerojedynkowych. W szczególności przetwarzane liczby kodowane są w systemie
Ćwiczenie nr 3 Wyświetlanie i wczytywanie danych 3.1 Wstęp Współczesne komputery przetwarzają dane zakodowane za pomocą ciągów zerojedynkowych. W szczególności przetwarzane liczby kodowane są w systemie
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Architektura komputera. Dane i rozkazy przechowywane są w tej samej pamięci umożliwiającej zapis i odczyt
 Architektura komputera Architektura von Neumanna: Dane i rozkazy przechowywane są w tej samej pamięci umożliwiającej zapis i odczyt Zawartośd tej pamięci jest adresowana przez wskazanie miejsca, bez względu
Architektura komputera Architektura von Neumanna: Dane i rozkazy przechowywane są w tej samej pamięci umożliwiającej zapis i odczyt Zawartośd tej pamięci jest adresowana przez wskazanie miejsca, bez względu
PODSTAWOWE ELEMENTY ASEMBLERA TRYBY ADRESOWANIA. OPERATORY ASEMBLERA
 PODSTAWOWE ELEMENTY ASEMBLERA TRYBY ADRESOWANIA. OPERATORY ASEMBLERA PODSTAWOWE ELEMENTY ASEMBLERA Składnia języka Postać wiersza programu Dyrektywy i pseudoinstrukcje Deklaracja zmiennych Zmienne łańcuchowe
PODSTAWOWE ELEMENTY ASEMBLERA TRYBY ADRESOWANIA. OPERATORY ASEMBLERA PODSTAWOWE ELEMENTY ASEMBLERA Składnia języka Postać wiersza programu Dyrektywy i pseudoinstrukcje Deklaracja zmiennych Zmienne łańcuchowe
ARCHITEKTURA PROCESORA,
 ARCHITEKTURA PROCESORA, poza blokami funkcjonalnymi, to przede wszystkim: a. formaty rozkazów, b. lista rozkazów, c. rejestry dostępne programowo, d. sposoby adresowania pamięci, e. sposoby współpracy
ARCHITEKTURA PROCESORA, poza blokami funkcjonalnymi, to przede wszystkim: a. formaty rozkazów, b. lista rozkazów, c. rejestry dostępne programowo, d. sposoby adresowania pamięci, e. sposoby współpracy
Organizacja pamięci VRAM monitora znakowego. 1. Tryb pracy automatycznej
 Struktura stanowiska laboratoryjnego Na rysunku 1.1 pokazano strukturę stanowiska laboratoryjnego Z80 z interfejsem częstościomierza- czasomierz PFL 21/22. Rys.1.1. Struktura stanowiska. Interfejs częstościomierza
Struktura stanowiska laboratoryjnego Na rysunku 1.1 pokazano strukturę stanowiska laboratoryjnego Z80 z interfejsem częstościomierza- czasomierz PFL 21/22. Rys.1.1. Struktura stanowiska. Interfejs częstościomierza
INŻYNIERIA BEZPIECZEŃSTWA LABORATORIUM NR 2 ALGORYTM XOR ŁAMANIE ALGORYTMU XOR
 INŻYNIERIA BEZPIECZEŃSTWA LABORATORIUM NR 2 ALGORYTM XOR ŁAMANIE ALGORYTMU XOR 1. Algorytm XOR Operacja XOR to inaczej alternatywa wykluczająca, oznaczona symbolem ^ w języku C i symbolem w matematyce.
INŻYNIERIA BEZPIECZEŃSTWA LABORATORIUM NR 2 ALGORYTM XOR ŁAMANIE ALGORYTMU XOR 1. Algorytm XOR Operacja XOR to inaczej alternatywa wykluczająca, oznaczona symbolem ^ w języku C i symbolem w matematyce.
KOMUNIKACJA Z OTOCZENIEM MIKROKONTROLERA
 Mikrokontrolery AVR KOMUNIKACJA Z OTOCZENIEM MIKROKONTROLERA Wyprowadzenia Każdy z mikrokontrolerów posiada pewną liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
Mikrokontrolery AVR KOMUNIKACJA Z OTOCZENIEM MIKROKONTROLERA Wyprowadzenia Każdy z mikrokontrolerów posiada pewną liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
Zadanie Zaobserwuj zachowanie procesora i stosu podczas wykonywania następujących programów
 Operacje na stosie Stos jest obszarem pamięci o dostępie LIFO (Last Input First Output). Adresowany jest niejawnie przez rejestr segmentowy SS oraz wskaźnik wierzchołka stosu SP. Używany jest do przechowywania
Operacje na stosie Stos jest obszarem pamięci o dostępie LIFO (Last Input First Output). Adresowany jest niejawnie przez rejestr segmentowy SS oraz wskaźnik wierzchołka stosu SP. Używany jest do przechowywania
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
organizacja procesora 8086
 Systemy komputerowe Procesor 8086 - tendencji w organizacji procesora organizacja procesora 8086 " # $ " % strali " & ' ' ' ( )" % *"towego + ", -" danych. Magistrala adresowa jest 20.bitowa, co pozwala
Systemy komputerowe Procesor 8086 - tendencji w organizacji procesora organizacja procesora 8086 " # $ " % strali " & ' ' ' ( )" % *"towego + ", -" danych. Magistrala adresowa jest 20.bitowa, co pozwala
Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach
 Marcin Stępniak Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach 1. Informacje Matematyk o nazwisku Bool wymyślił gałąź matematyki do przetwarzania wartości prawda
Marcin Stępniak Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach 1. Informacje Matematyk o nazwisku Bool wymyślił gałąź matematyki do przetwarzania wartości prawda
Mikrokontrolery AVR Wprowadzenie
 Mikrokontrolery AVR Wprowadzenie Komunikacja z otoczeniem mikrokontrolera Każdy z mikrokontrolerów posiada pewna liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
Mikrokontrolery AVR Wprowadzenie Komunikacja z otoczeniem mikrokontrolera Każdy z mikrokontrolerów posiada pewna liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
Inż. Kamil Kujawski Inż. Krzysztof Krefta. Wykład w ramach zajęć Akademia ETI
 Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Dostęp do portów mikrokontrolera ATmega32 język C laboratorium: 10 autorzy: dr
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Dostęp do portów mikrokontrolera ATmega32 język C laboratorium: 10 autorzy: dr
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
1. Operacje logiczne A B A OR B
 1. Operacje logiczne OR Operacje logiczne są operacjami działającymi na poszczególnych bitach, dzięki czemu można je całkowicie opisać przedstawiając jak oddziałują ze sobą dwa bity. Takie operacje logiczne
1. Operacje logiczne OR Operacje logiczne są operacjami działającymi na poszczególnych bitach, dzięki czemu można je całkowicie opisać przedstawiając jak oddziałują ze sobą dwa bity. Takie operacje logiczne
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Programowalne układy logiczne
 Programowalne układy logiczne Mikroprocesor Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 6 grudnia 2014 Zbudujmy własny mikroprocesor Bardzo prosty: 16-bitowy, 16 rejestrów
Programowalne układy logiczne Mikroprocesor Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 6 grudnia 2014 Zbudujmy własny mikroprocesor Bardzo prosty: 16-bitowy, 16 rejestrów
Logiczny model komputera i działanie procesora. Część 1.
 Logiczny model komputera i działanie procesora. Część 1. Klasyczny komputer o architekturze podanej przez von Neumana składa się z trzech podstawowych bloków: procesora pamięci operacyjnej urządzeń wejścia/wyjścia.
Logiczny model komputera i działanie procesora. Część 1. Klasyczny komputer o architekturze podanej przez von Neumana składa się z trzech podstawowych bloków: procesora pamięci operacyjnej urządzeń wejścia/wyjścia.
Rejestry procesora. Nazwa ilość bitów. AX 16 (accumulator) rejestr akumulatora. BX 16 (base) rejestr bazowy. CX 16 (count) rejestr licznika
 rejestr akumulatora. BX 16 (base) rejestr bazowy. CX 16 (count) rejestr licznika") Rejestry procesora Procesor podczas wykonywania instrukcji posługuje się w dużej części pamięcią RAM. Pobiera z niej kolejne instrukcje do wykonania i dane, jeżeli instrukcja operuje na jakiś zmiennych.
Rejestry procesora Procesor podczas wykonywania instrukcji posługuje się w dużej części pamięcią RAM. Pobiera z niej kolejne instrukcje do wykonania i dane, jeżeli instrukcja operuje na jakiś zmiennych.
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Pośredniczy we współpracy pomiędzy procesorem a urządzeniem we/wy. W szczególności do jego zadań należy:
 Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Liczniki, rejestry lab. 08 Mikrokontrolery WSTĘP
 Liczniki, rejestry lab. 08 PODSTAWY TECHNIKI CYFROWEJ I MIKROPROCESOROWEJ EIP KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA WWW.AGH.EDU.PL
Liczniki, rejestry lab. 08 PODSTAWY TECHNIKI CYFROWEJ I MIKROPROCESOROWEJ EIP KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA WWW.AGH.EDU.PL
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Mikroprocesor Operacje wejścia / wyjścia
 Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Ćwiczenie 01 - Strona nr 1 ĆWICZENIE 01
 ĆWICZENIE 01 Ćwiczenie 01 - Strona nr 1 Polecenie: Bez użycia narzędzi elektronicznych oraz informatycznych, wykonaj konwersje liczb z jednego systemu liczbowego (BIN, OCT, DEC, HEX) do drugiego systemu
ĆWICZENIE 01 Ćwiczenie 01 - Strona nr 1 Polecenie: Bez użycia narzędzi elektronicznych oraz informatycznych, wykonaj konwersje liczb z jednego systemu liczbowego (BIN, OCT, DEC, HEX) do drugiego systemu
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
2. PORTY WEJŚCIA/WYJŚCIA (I/O)
") 2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
1.2 Schemat blokowy oraz opis sygnałów wejściowych i wyjściowych
 Dodatek A Wyświetlacz LCD. Przeznaczenie i ogólna charakterystyka Wyświetlacz ciekłokrystaliczny HY-62F4 zastosowany w ćwiczeniu jest wyświetlaczem matrycowym zawierającym moduł kontrolera i układ wykonawczy
Dodatek A Wyświetlacz LCD. Przeznaczenie i ogólna charakterystyka Wyświetlacz ciekłokrystaliczny HY-62F4 zastosowany w ćwiczeniu jest wyświetlaczem matrycowym zawierającym moduł kontrolera i układ wykonawczy
Architektura systemów komputerowych Laboratorium 7 Symulator SMS32 Stos, Tablice, Procedury
 Marcin Stępniak Architektura systemów komputerowych Laboratorium 7 Symulator SMS32 Stos, Tablice, Procedury 1. Informacje 1.1. Stos Stos jest strukturą danych, w której dane dokładane są na wierzch stosu
Marcin Stępniak Architektura systemów komputerowych Laboratorium 7 Symulator SMS32 Stos, Tablice, Procedury 1. Informacje 1.1. Stos Stos jest strukturą danych, w której dane dokładane są na wierzch stosu
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Przedmiot : Programowanie w języku wewnętrznym. Ćwiczenie nr 4
 Przedmiot : Programowanie w języku wewnętrznym Ćwiczenie nr 4 str. 1. 1. Użycie Asemblera. Polecenie JMP. Polecenie nakazuje procesorowi wykonywanie kodu programu od nowego innego miejsca. Miejsce to jest
Przedmiot : Programowanie w języku wewnętrznym Ćwiczenie nr 4 str. 1. 1. Użycie Asemblera. Polecenie JMP. Polecenie nakazuje procesorowi wykonywanie kodu programu od nowego innego miejsca. Miejsce to jest
Procesor ma architekturę rejestrową L/S. Wskaż rozkazy spoza listy tego procesora. bgt Rx, Ry, offset nand Rx, Ry, A add Rx, #1, Rz store Rx, [Rz]
![Procesor ma architekturę rejestrową L/S. Wskaż rozkazy spoza listy tego procesora. bgt Rx, Ry, offset nand Rx, Ry, A add Rx, #1, Rz store Rx, [Rz]](/thumbs/57/40653782.jpg "Procesor ma architekturę rejestrową L/S. Wskaż rozkazy spoza listy tego procesora. bgt Rx, Ry, offset nand Rx, Ry, A add Rx, #1, Rz store Rx, [Rz]") Procesor ma architekturę akumulatorową. Wskaż rozkazy spoza listy tego procesora. bgt Rx, Ry, offset or Rx, Ry, A add Rx load A, [Rz] push Rx sub Rx, #3, A load Rx, [A] Procesor ma architekturę rejestrową
Procesor ma architekturę akumulatorową. Wskaż rozkazy spoza listy tego procesora. bgt Rx, Ry, offset or Rx, Ry, A add Rx load A, [Rz] push Rx sub Rx, #3, A load Rx, [A] Procesor ma architekturę rejestrową
Kurs STARTER S5. Spis treści. Dzień 1. III Budowa wewnętrzna, działanie i obsługa sterownika (wersja 0504)
") I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury
 Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
1. Struktura urządzeń z wykorzystaniem mikrokontrolerów...13
 3 Od autora...9 Wstęp...10 1. Struktura urządzeń z wykorzystaniem mikrokontrolerów...13 2. Jak jest zbudowany mikrokontroler AVR...15 2.1. Pamięć programu...16 2.2. Pamięć danych...16 2.3. Rejestry mikrokontrolera...17
3 Od autora...9 Wstęp...10 1. Struktura urządzeń z wykorzystaniem mikrokontrolerów...13 2. Jak jest zbudowany mikrokontroler AVR...15 2.1. Pamięć programu...16 2.2. Pamięć danych...16 2.3. Rejestry mikrokontrolera...17
Podstawy techniki cyfrowej Mikroprocesory. Mgr inż. Bogdan Pietrzak ZSR CKP Świdwin
 Podstawy techniki cyfrowej Mikroprocesory Mgr inż. Bogdan Pietrzak ZSR CKP Świdwin 1 Mikroprocesor to układ cyfrowy wykonany jako pojedynczy układ scalony o wielkim stopniu integracji zdolny do wykonywania
Podstawy techniki cyfrowej Mikroprocesory Mgr inż. Bogdan Pietrzak ZSR CKP Świdwin 1 Mikroprocesor to układ cyfrowy wykonany jako pojedynczy układ scalony o wielkim stopniu integracji zdolny do wykonywania
Tranzystor JFET i MOSFET zas. działania
 Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Kurs Podstawowy S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe
 Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe Ryszard J. Barczyński, 2009 2013 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe Ryszard J. Barczyński, 2009 2013 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Architektura komputerów
 Architektura komputerów Wykład 8 Jan Kazimirski 1 Assembler x86 2 Podstawowe instrukcje x86 Instrukcje transferu danych Arytmetyka binarna i dziesiętna Instrukcje logiczne Instrukcje sterujące wykonaniem
Architektura komputerów Wykład 8 Jan Kazimirski 1 Assembler x86 2 Podstawowe instrukcje x86 Instrukcje transferu danych Arytmetyka binarna i dziesiętna Instrukcje logiczne Instrukcje sterujące wykonaniem
Kurs Zaawansowany S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Architektura typu Single-Cycle
 Architektura typu Single-Cycle...czyli budujemy pierwszą maszynę parową Przepływ danych W układach sekwencyjnych przepływ danych synchronizowany jest sygnałem zegara Elementy procesora - założenia Pamięć
Architektura typu Single-Cycle...czyli budujemy pierwszą maszynę parową Przepływ danych W układach sekwencyjnych przepływ danych synchronizowany jest sygnałem zegara Elementy procesora - założenia Pamięć
Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne
 Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Liczniki, rejestry lab. 09 Mikrokontrolery 8051 cz. 1
 Liczniki, rejestry lab. 09 Mikrokontrolery 8051 cz. 1 PODSTAWY TECHNIKI CYFROWEJ I MIKROPROCESOROWEJ EIP KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA
Liczniki, rejestry lab. 09 Mikrokontrolery 8051 cz. 1 PODSTAWY TECHNIKI CYFROWEJ I MIKROPROCESOROWEJ EIP KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA
Struktura programu w asemblerze mikrokontrolera 8051
 Struktura programu w asemblerze mikrokontrolera 8051 Program w asemblerze, dający ten sam kod wynikowy, może być napisany na wiele sposobów. Źle napisany program po pewnym czasie (a być może już w czasie
Struktura programu w asemblerze mikrokontrolera 8051 Program w asemblerze, dający ten sam kod wynikowy, może być napisany na wiele sposobów. Źle napisany program po pewnym czasie (a być może już w czasie
Programowanie niskopoziomowe
 Programowanie niskopoziomowe ASSEMBLER Teodora Dimitrova-Grekow http://aragorn.pb.bialystok.pl/~teodora/ Program ogólny Rok akademicki 2011/12 Systemy liczbowe, budowa komputera, procesory X86, organizacja
Programowanie niskopoziomowe ASSEMBLER Teodora Dimitrova-Grekow http://aragorn.pb.bialystok.pl/~teodora/ Program ogólny Rok akademicki 2011/12 Systemy liczbowe, budowa komputera, procesory X86, organizacja
Układ sterowania, magistrale i organizacja pamięci. Dariusz Chaberski
 Układ sterowania, magistrale i organizacja pamięci Dariusz Chaberski Jednostka centralna szyna sygnałow sterowania sygnały sterujące układ sterowania sygnały stanu wewnętrzna szyna danych układ wykonawczy
Układ sterowania, magistrale i organizacja pamięci Dariusz Chaberski Jednostka centralna szyna sygnałow sterowania sygnały sterujące układ sterowania sygnały stanu wewnętrzna szyna danych układ wykonawczy
Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515
 Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Wprowadzenie do architektury komputerów systemy liczbowe, operacje arytmetyczne i logiczne
 Wprowadzenie do architektury komputerów systemy liczbowe, operacje arytmetyczne i logiczne 1. Bit Pozycja rejestru lub komórki pamięci służąca do przedstawiania (pamiętania) cyfry w systemie (liczbowym)
Wprowadzenie do architektury komputerów systemy liczbowe, operacje arytmetyczne i logiczne 1. Bit Pozycja rejestru lub komórki pamięci służąca do przedstawiania (pamiętania) cyfry w systemie (liczbowym)
Ćwiczenie 27 Temat: Układy komparatorów oraz układy sumujące i odejmujące i układy sumatorów połówkowych i pełnych. Cel ćwiczenia
 Ćwiczenie 27 Temat: Układy komparatorów oraz układy sumujące i odejmujące i układy sumatorów połówkowych i pełnych. Cel ćwiczenia Poznanie zasad budowy działania komparatorów cyfrowych. Konstruowanie komparatorów
Ćwiczenie 27 Temat: Układy komparatorów oraz układy sumujące i odejmujące i układy sumatorów połówkowych i pełnych. Cel ćwiczenia Poznanie zasad budowy działania komparatorów cyfrowych. Konstruowanie komparatorów
architektura komputerów w 1 1
 8051 Port P2 Port P3 Transm. szeregowa Timery T0, T1 Układ przerwań Rejestr DPTR Licznik rozkazów Pamięć programu Port P0 Port P1 PSW ALU Rejestr B SFR akumulator 8051 STRUKTURA architektura komputerów
8051 Port P2 Port P3 Transm. szeregowa Timery T0, T1 Układ przerwań Rejestr DPTR Licznik rozkazów Pamięć programu Port P0 Port P1 PSW ALU Rejestr B SFR akumulator 8051 STRUKTURA architektura komputerów
Programowanie mikrokontrolerów. 3 stycznia 2008
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 3 stycznia 2008 Liczniki, cd. Przypomnienie wiadomości o liczniku 0 Przykładowy program korzystający z licznika Ćwiczenia praktyczne Licznik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 3 stycznia 2008 Liczniki, cd. Przypomnienie wiadomości o liczniku 0 Przykładowy program korzystający z licznika Ćwiczenia praktyczne Licznik
1. Poznanie właściwości i zasady działania rejestrów przesuwnych. 2. Poznanie właściwości i zasady działania liczników pierścieniowych.
 Ćwiczenie 9 Rejestry przesuwne i liczniki pierścieniowe. Cel. Poznanie właściwości i zasady działania rejestrów przesuwnych.. Poznanie właściwości i zasady działania liczników pierścieniowych. Wprowadzenie.
Ćwiczenie 9 Rejestry przesuwne i liczniki pierścieniowe. Cel. Poznanie właściwości i zasady działania rejestrów przesuwnych.. Poznanie właściwości i zasady działania liczników pierścieniowych. Wprowadzenie.
Kod produktu: MP01611
 CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
Programowanie Niskopoziomowe
 Programowanie Niskopoziomowe Wykład 2: Reprezentacja danych Dr inż. Marek Mika Państwowa Wyższa Szkoła Zawodowa im. Jana Amosa Komeńskiego W Lesznie Plan Kilka ciekawostek Zapisy binarny, oktalny, decymalny
Programowanie Niskopoziomowe Wykład 2: Reprezentacja danych Dr inż. Marek Mika Państwowa Wyższa Szkoła Zawodowa im. Jana Amosa Komeńskiego W Lesznie Plan Kilka ciekawostek Zapisy binarny, oktalny, decymalny
Ćw. 7: Układy sekwencyjne
 Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Mikrokontroler 80C51
 DSM-51 * STRONA 1 * Temat : Wiadomości podstawowe Układy cyfrowe to rodzaj układów elektronicznych, w których sygnały napięciowe przyjmują tylko określoną liczbę poziomów, którym przypisywane są wartości
DSM-51 * STRONA 1 * Temat : Wiadomości podstawowe Układy cyfrowe to rodzaj układów elektronicznych, w których sygnały napięciowe przyjmują tylko określoną liczbę poziomów, którym przypisywane są wartości
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Ćwiczenie 2. Siedmiosegmentowy wyświetlacz LED
 Ćwiczenie 2 Siedmiosegmentowy wyświetlacz LED 2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się studentów ze sposobem obsługi wielopozycyjnego 7-segmentowego wyświetlacza LED multipleksowanego programowo
Ćwiczenie 2 Siedmiosegmentowy wyświetlacz LED 2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się studentów ze sposobem obsługi wielopozycyjnego 7-segmentowego wyświetlacza LED multipleksowanego programowo
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
START: ; start programu od adresu 0100H ; zerowanie komórek od 01H do 07FH ( 1 dec dec)
") Ćwiczenie 01 - Strona nr 1 ĆWICZENIE 01 PRACA KROKOWA MIKROKONTROLERA Cel ćwiczenia: Zapoznanie się ze środowiskiem programowym: poznanie funkcji asemblera, poznanie funkcji symulatora. Operacje na plikach,
Ćwiczenie 01 - Strona nr 1 ĆWICZENIE 01 PRACA KROKOWA MIKROKONTROLERA Cel ćwiczenia: Zapoznanie się ze środowiskiem programowym: poznanie funkcji asemblera, poznanie funkcji symulatora. Operacje na plikach,