MIKROKONTROLERY - MAGISTRALE SZEREGOWE
|
|
|
- Kajetan Kujawa
- 8 lat temu
- Przeglądów:
Transkrypt
1 Liczba magistral szeregowych jest imponująca RS232, i2c, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka interfejsów komunikacyjnych. Łatwo dostępne są też kości obsługujące protokół jednego typu magistrali 'tłumaczące go na inny protokól. Np CAN-RS232. Każdy protokół (ale zwykle z ograniczeniami dotyczącymi szybkości transmisji) można zaprogramować. Zwykle ma to jednak jedynie wartość dydaktyczną. Zajmowanie jednostki centralnej do udawania układu peryferyjnego jest w większości wypadków pomyłką. Sprzętowy interfejs komunikacyjny poza realizacją protokołu ma z reguły szereg funkcji kontrolnych, których zaprogramowanie nie jest możliwe. JEDNĄ Z PODSTAWOWYCH REGUŁ MAŁO PODKREŚLANYCH W OPISACH WAŻNĄ DLA WIĘKSZOŚCI PROTOKOŁÓW JEST ZDOLNOŚĆ ( OBOWIĄZEK ) KAŻDEGO INTERFEJSU DO PERMANENTNEJ KONTROLI STANU LINII. 1/33
2 SPI Serial Peripheral Interface Wprowadzona przez MOTOROLĘ synchroniczna magistrala dla komunikacji typu master-slave. Nazywana czasem 4-wire: SCLK Serial Clock MOSI Master Output MISO Master Input SS Slave Select 2/33
3 Konwencja nazw nie jest ściśle przestrzegana Spotyka się SCK, CLK, SDI, DI, SI, SDO, DO, SO, ncs, CS, CSB CSN... BUS SPI MOŻE OPEROWAĆ Z POJEDYNCZYM MASTER I WIELOMA SLAVE MASTER ZAWSZE INICJUJE TRANSMISJĘ PRZEZ PRZYGOTOWANIE ZEGARA. JEGO CZĘSTOTLIWOŚĆ MUSI BYĆ MNIEJSZA LUB RÓWNA MAKSYMALNEJ CZĘSTOTLIWOŚCI AKCEPTOWANEJ PRZEZ ODBIORNIKI. ZWYKLE 1 70 MHz. NASTĘPNIE MASTER WYBIERA SLAVE'a PRZEZ LINIĘ SS ( ACTIVE LOW ) ZWYKLE POWINIEN ODCZEKAĆ NIM ZACZNIE NADAWAĆ CLOCK. W CZASIE KAŻDEGO CYKLU ZEGARA ODBYWA SIĘ TRANSMISJA FULL DUPLEX MASTER PRZESYŁA BITY LINIĄ MOSI, A SLAVE ODCZYTUJE JE Z TEJ SAMEJ LINII. RÓWNOCZEŚNIE SLAVE WYSYŁA BITY LINIĄ MISO, A MASTER CZYTA JE Z TEJ LINII. TAKA TRANMISJA WYMAGA ZWYKLE DWÓCH REJESTRÓW PRZESUWNYCH, JEDEN U MASTER'A JEDEN U SLAVE'A. TRANSMISJA ZWYKLE ZACZYNA SIĘ OD PRZESYŁANIA MSB (ALE MOŻE TO BYĆ PRZEDMIOTEM KONFIGURACJI NP. W AVR). TRANSMISJA MOŻE TRWAĆ DOWOLNĄ LICZBĘ CYKLI. ZWYKLE KOŃCZY SIĘ, GDY MASTER WSTRZYMUJE ZEGAR (I ZDEJMUJE WYBÓR SLAVE'A ) 3/33
")
4 GDY WIĘCEJ NIŻ JEDEN SLAVE WYSTĘPUJE W SIECI TO MOŻNA ROZRÓŻNIĆ DWA TYPY POŁĄCZEŃ: - SIEĆ NIEZALEŻNYCH ODBIORNIKÓW - SIEĆ ODBIORNIKÓW POŁĄCZONYCH SZEREGOWO ( DAISY CHAIN ) 4/33

5 MASTER WYBIERA CZĘSTOTLIWOŚĆ ZEGARA oraz KONFIGURUJE JEGO FAZĘ (CPHA) I POLARNOŚĆ (CPOL) CPOL i CPHA PRZYJMUJĄ WARTOŚCI 0 i 1 PRÓBKOWANIE (ODCZYT) ORAZ USTAWIANIE LINII DANYCH (MOSI I MISO) ODBYWA SIĘ PRZY ZMIANACH STANU LINII ZEGARA SCK CPOL = 0 CPHA = 0 SCK: ZBOCZE NARASTAJĄCE =ODCZYT OPADAJĄCE = ZAPIS CPOL = 0 CPHA = 1 SCK: ZBOCZE NARASTAJĄCE = ZAPIS OPADAJĄCE = ODCZYT CPOL = 1 CPHA = 0 SCK: ZBOCZE NARASTAJĄCE = ZAPIS OPADAJĄCE = ODCZYT CPOL = 1 CPHA = 1 SCK: ZBOCZE NARASTAJĄCE = ODCZYT OPADAJĄCE = ZAPIS 5/33
6 I2C - BUS MAGISTRALA WPROWADZONA PRZEZ PHILIPS'a WYMAGA DWÓCH LINII AKTYWNYCH I MASY LINIE AKTYWNE TO SDA LINIA DANYCH SCL LINIA ZEGARA 6/33
7 KAŻDE URZĄDZENIE DOŁĄCZONE DO MAGISTRALI MA SWÓJ UNIKALNY ADRES. KAŻDE MOŻE BYĆ ODBIORNIKIEM LUB NADAJNIKIEM JEST TO MAGISTRALA MULTIMASTER CO ZNACZY, ŻE URZĄDZENIE STARTUJĄCE TRANSMISJĘ STAJE SIĘ MASTER'em. ALE, ZATEM, POJAWIA SIĘ PROBLEM ARBITRACJI CZASOWE RELACJE SCL I SDA DEFINIJJĄ ISTOTNE ELEMENTY PROTOKOŁU. SEKWENCJA START SEKWENCJA STOP DANE OK, GDY SCL HIGH DANE ZMIENIAMY, GDY SCL LOW 7/33
8 TRANSMISJA DANYCH POTWIERDZENIE --- ACKNOWLEDGE 8/33
9 9/33
10 10/33
11 KLASYCZNE I2C STOSUJE 7-MIO BITOWE ADRESOWANIE W WERSJI ROZSZERZONEJ ADRES JEST 10-BITOWY. ALE NAWET WTEDY PO PIERWSZYCH SIEDMIU BITACH ADRESU NADAWANY JEST 8-MY BIT KIERUNKU NASTĘPNEJ TRANSMISJI N.B. LSB KIERUNKU = 0 OZNACZA, ŻE MASTER BĘDZIE PISAĆ (NADAWAĆ) KOLEJNY BAJT = 1 OZNACZA, ŻE MASTER BĘDZIE CZYTAĆ NASTĘPNY BAJT SYNCHRONIZACJA ZEGARA I ARBITRACJA DOSTĘPU DO MAGISTRALI.. SYNCHRONIZACJA OPIERA SIĘ NA POMYŚLE 'WIRED-AND WSZYSTKICH LINII SCL. SCL LOW JEST WYZNACZONY PRZEZ URZĄDZENIE O NAJDŁUŻSZYM OKRESIE LOW A STAN HIGH WYZNACZA URZĄDZENIE O NAKRÓTSZYM OKRESIE HIGH ARBITRACJA DOSTĘPU DO LINII OPIERA SIĘ NA POMYŚLE DOMINANT LOW LINII SDA (I WSPOMNIANYM OBOWIĄZKU CZYTANIA STANU LINII) 11/33

12 JESZCZE RAZ PRZYKŁADY RAMEK DLA TRANSMISJI DANYCH 12/33
13 CAN BUS Control Area Network Magistrala wymyślona dla przemysłu samochodowego przez BOSCH'a 13/33
14 RAMKI CAN MIKROKONTROLERY - MAGISTRALE SZEREGOWE CAN 2 A CAN 2 B 14/33
15 BARDZO BOGATA RAMKA 11-BITOWY LUB 29-BITOWY IDENTYFIKATOR IDENTYFIKOWANY JEST TYP KOMUNIKATU, NIE URZĄDZENIE! ROZWINĘTA DETEKCJA BŁĘDÓW TRANSMISJI DETEKCJĘ BŁĘDÓW MUSZĄ PROWADZIĆ STALE WSZYSTKIE URZĄDZENIA KAŻDE WYKRYCIE BŁEDU OZNACZA OBOWIĄZEK WYSŁANIA KOMUNIKATU BŁĘDU BŁĘDNY KOMUNIKAT JEST SKASOWANY U WSZYSTKICH (WĘZŁÓW) STAN WSZYSTKICH KONTROLERÓW JEST ODNOWIONY co to oznacza... KOMUNIKAT JEST POWTARZANY, A JEŚLI JEST WIĘCEJ CHĘTNYCH DO NADAWANIA, TO ODBYWA SIĘ ZWYKŁA ARBITRACJA DOSTĘPU TYPY WYKRYWANYCH BŁEDÓW BŁĘDY BITÓW - BIT STUFFING ERROR - ZWYKŁA NIEZGODNOŚĆ NADAWANIA/ODCZYTU U NADAWCY BŁĘDY KOMUNIKATU - SUMA KONTROLNA - BŁĄD RAMKI - BŁĄD POTWIERDZENIA KAŻDY WĘZEŁ MOŻE BYĆ W JEDNYM Z TRZECH STANÓW: ERROR ACTIVE ERROR PASSIVE BUS OFF 15/33
16 CAN BUS LENGTH Bus length (metres) Maximum bit rate (bit/s) 40 1 Mbit/s kbit/s kpit/s kbit/s 6 km 10 kbit/s 16/33
17 17/33
18 18/33
19 19/33
20 20/33
21 21/33
22 22/33
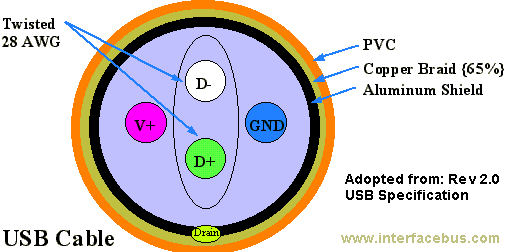
23 USB Pin Location, Type A Connector MIKROKONTROLERY - MAGISTRALE SZEREGOWE USB Pinout, Cable Assembly Pin Signal Name Description 1 VBUS Red 2 D- White 3 D+ Green 4 GND Black Shell Shield Drain 23/33


24 Extreme USB - USB Converter, Hub/Hub allows USB up to 100 meters 24/33
25 . 25/33
26 26/33
27 27/33

28 Przykład wyposażenia w interfejsy szeregowe 28/33
29 PRZYKŁAD OBSŁUGI INTERFEJSU RS232 WŁĄCZONEGO W SYSTEM PRZERWAŃ ZREALIZOWANY NA ADuC812 (ANALOG DEVICES) ZAŁOŻENIA DOTYCZĄCE KOMUNIKACJI: 1. ROZMAWIAJĄCE STRONY WYMIENIAJĄ KOMUNIKATY O DŁUGOŚCI NBYTE +1 (< 32). Pierwszy bajt komunikatu to NBYTE, po którym następuje NBYTE bajtów danych, 2. KOMUNIKACJA ODBYWA SIĘ BEZ KONTORLI PARZYSTOŚCI, 3. SZYBKOŚĆ TRANSMISJI, TAKTOWANIE PROCESORA, KONFIGURACJA TRYBU TRANSMISJI WŁĄCZAJĄCA UŻYCIE TIMERA1 ZOSTAŁA POPRAWNIE WYKONANA W PROGRAMIE GŁÓWNYM, 4. PĘTLA GŁÓWNA UŻYWA BANKU REJESTRÓW 0, W OBSŁUDZE PRZERWANIA OD ŁĄCZA RS232 UŻYWA SIĘ BANKU ODEBRANIE PEŁNEGO KOMUNIKATU SYGNALIZOWANE JEST (PROGRAMOWI GŁÓWNEMU) USTAWIENIEM FLAGI 9 (BIT 9 W BITOWO-ADRESOWALNYM OBSZARZE PAMIĘCI DANYCH) 6. ZAKOŃCZENIE NADAWANIA KOMPLETNEGO (N-BYTOWEGO) KOMUNIKATU SYGNALIZOWANE JEST USTAWIENIEM BITU 8 ;Przykład UART ISR (interrupt service routine) dla ADuC812 ;; FLAGS ; 08H serial input completed ; 09H serial transmission completed ; $MOD812 ;rodzaj include file, podającej asemblerowi słownik dotyczący ADuC812 ; ; Własne definicje nazw komunikowane asemblerowi ; STOS DATA 70H 29/33
30 PRZYKŁAD OBSŁUGI INTERFEJSU RS232 WŁĄCZONEGO W SYSTEM PRZERWAŃ ZREALIZOWANY NA ADuC812 (ANALOG DEVICES) ;Przykład UART ISR (interrupt service routine) dla ADuC812 KONTYNUACJA ; STOS DATA 70H STATUS DATA 22H BUFIN DATA 30H ;bufor dla komunikatów przychodzących CNB DATA 3FH ;NBYTE BUFOU DATA 60H ;bufor dla komunikatów wysyłanych BOLNG EQU 06H ;jego długość ; CSEG ;dyrektywa asemblera (raczej zbędna) ORG 000H ;ta za to BARDZO ważna: tu ładuj następujący fragment programu AJMP START ; stamtąd naprawdę zaczynamy, ale sprzęt ustawia początek na ZERO ;==================================================================== ; INTERRUPT SERVICES ;==================================================================== ; UPRZEDZAJĄC PEŁNE STUDIA OBSŁUGI PRZERWAŃ WIEDZMY, ŻE: - WEWNĘTRZNE UKŁADY PERYFERYNE MOGĄ ZGŁASZAĆ PRZERWANIA - NP. USART ZGŁASZA ODEBRANIE NOWEGO BAJTU DO REJESTRU SBUF - LUB ZAKOŃCZENIE WYSYŁANIA BAJTU Z REJESTRU SBUF (wyjściowego) - DLA ADuC812 TO ODDZIELNE FLAGI, ALE ADRES OBSŁUGI JEST JEDEN 30/33
31 PRZYKŁAD OBSŁUGI INTERFEJSU RS232 WŁĄCZONEGO W SYSTEM PRZERWAŃ ZREALIZOWANY NA ADuC812 (ANALOG DEVICES) KONTYNUACJA ORG 23H ;RSR232 ma tu sprzętowy adres dla obsługi przerwania PUSH ACC PUSH PSW SETB RS0 ;BANK 1 JBC TI,WYDAJ CLR RI ;przerwania było z powodu ODCZYTU bajtu przez usart ; ;R0 zawiera bierzący adres buforze wejściowym CJNE R2,#00H,avan MOV CNB,@R0 ;NBYTE do CNB avan: MOV A,R2 CJNE A,CNB,avant SETB 8 ;ustaw czytanie komunikatu zakończone flaga 9 SJMP back avant: INC R2 ;izwiększ licznik przeczytanych bajtów INC R0 ;i adres dla przyjęcia kolejnego w buforze SJMP back WYDAJ: 31/33
32 PRZYKŁAD OBSŁUGI INTERFEJSU RS232 WŁĄCZONEGO W SYSTEM PRZERWAŃ ZREALIZOWANY NA ADuC812 (ANALOG DEVICES) KONTYNUACJA WYDAJ: CJNE R3,#00H,go SETB 9 ;transmisja zakończona MOV R1,#BUFOU MOV R3,#BOLNG ;można przygotować ewentualnie nowy adres i długość SJMP back go: MOV SBUF,@R1 DEC R3 INC R1 back: CLR RS0 POP PSW POP ACC RETI ; ; ORG 70H ;==================================================================== START: 32/33
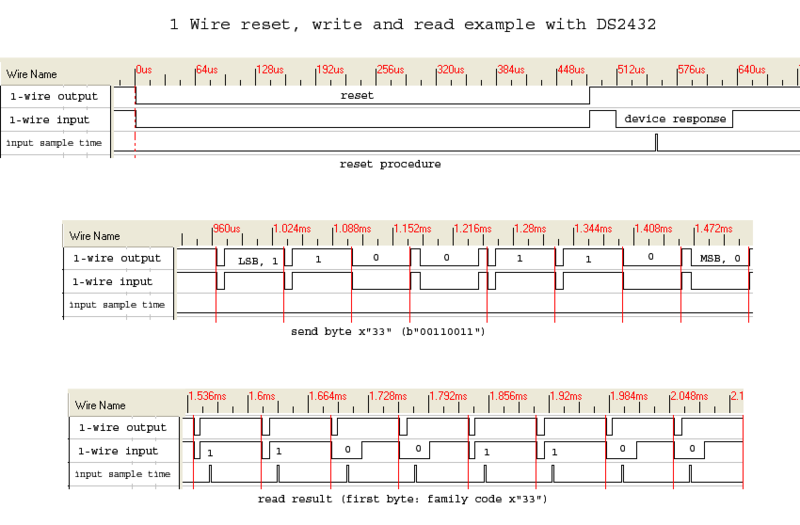
33 PRZYKŁAD OBSŁUGI INTERFEJSU RS232 WŁĄCZONEGO W SYSTEM PRZERWAŃ ZREALIZOWANY NA ADuC812 (ANALOG DEVICES) KONTYNUACJA START: MOV SP,#STACK ANL STATUS,#00H ;clear STATUS ; ; initiate timer and serial transmission MOV TMOD,# B ;Timer0, mode1, Timer1 mode2 MOV SCON,#92H ;SERIAL MODE 2,READ ENBL, TI UP MOV PCON,#80H ;DOUBLE SPEED, SMOD=1 SETB RS0 ;BANK1 MOV R0,#BUFIN MOV R2,#00H ;input buffer counter, used to count up MOV R1,#BUFOU MOV R3,#BOLNG ;out buf counter, used to count down CLR RS0 ; CLR 8 ;"new string completed and waiting" CLR 9 ; ; MAIN LOOP ; lupa: ; setb AJMP lupa END 33/33
MIKROKONTROLERY - MAGISTRALE SZEREGOWE
 Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portu szeregowego laboratorium: 05 autor: mgr inż. Michal Lankosz dr hab.
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portu szeregowego laboratorium: 05 autor: mgr inż. Michal Lankosz dr hab.
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Przerwania w architekturze mikrokontrolera X51
 Przerwania w architekturze mikrokontrolera X51 (przykład przerwanie zegarowe) Ryszard J. Barczyński, 2009 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku
Przerwania w architekturze mikrokontrolera X51 (przykład przerwanie zegarowe) Ryszard J. Barczyński, 2009 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku
MAGISTRALE MIKROKONTROLERÓW (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska") (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
(BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
MIKROPROCESORY architektura i programowanie
 Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Systemy wbudowane - wykład 8. Dla zabicia czasu Notes. I 2 C aka IIC aka TWI. Notes. Notes. Notes. Przemek Błaśkiewicz.
 Systemy wbudowane - wykład 8 Przemek Błaśkiewicz 17 maja 2017 1 / 82 Dla zabicia czasu Bluetooth Terminal HC-05, urządzenie...:8f:66, kod 1234 2 / 82 I 2 C aka IIC aka TWI Inter-Integrated Circuit 3 /
Systemy wbudowane - wykład 8 Przemek Błaśkiewicz 17 maja 2017 1 / 82 Dla zabicia czasu Bluetooth Terminal HC-05, urządzenie...:8f:66, kod 1234 2 / 82 I 2 C aka IIC aka TWI Inter-Integrated Circuit 3 /
Interfejsy szeregowe TEO 2009/2010
 Interfejsy szeregowe TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Interfejsy szeregowe SCI, SPI Wykład 2: - Interfejs I 2 C, OneWire, I 2 S, CAN Wykład 3: - Interfejs USB Wykład 4: - Interfejs FireWire,
Interfejsy szeregowe TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Interfejsy szeregowe SCI, SPI Wykład 2: - Interfejs I 2 C, OneWire, I 2 S, CAN Wykład 3: - Interfejs USB Wykład 4: - Interfejs FireWire,
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Współpraca procesora ColdFire z urządzeniami peryferyjnymi
 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
2010-04-12. Magistrala LIN
 Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
MIKROPROCESORY architektura i programowanie
 Systematyczny przegląd. (CISC) SFR umieszczane są w wewnętrznej pamięci danych (80H 0FFH). Adresowanie wyłącznie bezpośrednie. Rejestry o adresach podzielnych przez 8 są też dostępne bitowo. Adres n-tego
Systematyczny przegląd. (CISC) SFR umieszczane są w wewnętrznej pamięci danych (80H 0FFH). Adresowanie wyłącznie bezpośrednie. Rejestry o adresach podzielnych przez 8 są też dostępne bitowo. Adres n-tego
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Przerwania laboratorium: 04 autor: mgr inż. Michał Lankosz dr hab. Zbisław Tabor,
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Przerwania laboratorium: 04 autor: mgr inż. Michał Lankosz dr hab. Zbisław Tabor,
(przykład uogólniony)
") Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Ćwiczenie 7 Matryca RGB
 IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32
 Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32 Autor: Dawid Lubomski Data opracowania streszczenia (wersja 2): 23.04.2018 Data wygłoszenia referatu: 06.04.2018 Wprowadzenie
Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32 Autor: Dawid Lubomski Data opracowania streszczenia (wersja 2): 23.04.2018 Data wygłoszenia referatu: 06.04.2018 Wprowadzenie
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Systemy wbudowane - wykład 7
 Systemy wbudowane - wykład 7 Przemek Błaśkiewicz 11 kwietnia 2019 1 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit 2 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit używa dwóch linii przesyłowych
Systemy wbudowane - wykład 7 Przemek Błaśkiewicz 11 kwietnia 2019 1 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit 2 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit używa dwóch linii przesyłowych
Podstawy systemów mikroprocesorowych. Interfejs USART. Interfejsy szeregowe w mikrokontrolerach AVR
 Podstawy systemów mikroprocesorowych Wykład nr 4 Interfejsy szeregowe dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Komputery przesyłają dane na dwa sposoby: równolegle: Kilka bitów danych
Podstawy systemów mikroprocesorowych Wykład nr 4 Interfejsy szeregowe dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Komputery przesyłają dane na dwa sposoby: równolegle: Kilka bitów danych
Analizowanie protokołów szeregowych oscyloskopami Rohde&Schwarz (2) SPI, I 2 C
 SPI, I 2 C") SPRZĘT Analizowanie protokołów szeregowych oscyloskopami Rohde&Schwarz (2) SPI, I 2 C Badanie protokołów komunikacyjnych jest już obowiązkową funkcją oscyloskopów cyfrowych co najmniej średniej klasy.
SPRZĘT Analizowanie protokołów szeregowych oscyloskopami Rohde&Schwarz (2) SPI, I 2 C Badanie protokołów komunikacyjnych jest już obowiązkową funkcją oscyloskopów cyfrowych co najmniej średniej klasy.
Programowalne układy logiczne kod kursu: ETD Układy sekwencyjne W
 Programowalne układy logiczne kod kursu: ETD008270 Układy sekwencyjne W6 10.05.2019 mgr inż. Maciej Rudek Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu
Programowalne układy logiczne kod kursu: ETD008270 Układy sekwencyjne W6 10.05.2019 mgr inż. Maciej Rudek Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu
4 Transmisja szeregowa, obsługa wyświetlacza LCD.
 1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Komunikacja z urzadzeniami zewnętrznymi
 Komunikacja z urzadzeniami zewnętrznymi Porty Łacza równoległe Łacza szeregowe Wymiana informacji - procesor, pamięć oraz urzadzenia wejścia-wyjścia Większość mikrokontrolerów (Intel, AVR, PIC) używa jednego
Komunikacja z urzadzeniami zewnętrznymi Porty Łacza równoległe Łacza szeregowe Wymiana informacji - procesor, pamięć oraz urzadzenia wejścia-wyjścia Większość mikrokontrolerów (Intel, AVR, PIC) używa jednego
Charakterystyka mikrokontrolerów
 Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Magistrala SPI. Linie MOSI i MISO sąwspólne dla wszystkich urządzeńna magistrali, linia SS jest prowadzona do każdego Slave oddzielnie.
 Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD.
 13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Techniki mikroprocesorowe i systemy wbudowane
 Intel 8051 układy Techniki mikroprocesorowe i systemy wbudowane Wykład 6 Układy oparte na procesorach rodziny Intel 51 Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa
Intel 8051 układy Techniki mikroprocesorowe i systemy wbudowane Wykład 6 Układy oparte na procesorach rodziny Intel 51 Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Pamięci EEPROM w systemach mikroprocesorowych, część 2
 Pamięci EEPROM w systemach mikroprocesorowych, część 2 Tym artyku³em koòczymy prezentacjí sposobûw programowania szeregowych pamiíci EEPROM. Poniewaø najwiíksz¹ popularnoúci¹ ciesz¹ sií wúrûd uøytkownikûw
Pamięci EEPROM w systemach mikroprocesorowych, część 2 Tym artyku³em koòczymy prezentacjí sposobûw programowania szeregowych pamiíci EEPROM. Poniewaø najwiíksz¹ popularnoúci¹ ciesz¹ sií wúrûd uøytkownikûw
Przykład oprogramowania protokołu komunikacyjnego dla łącza równoległego pomiędzy procesorem master i wieloma procesorami slave
 MIKROPROCESORY i MIKROKONTROLERY Przykład oprogramowania protokołu komunikacyjnego dla łącza równoległego pomiędzy procesorem master i wieloma procesorami slave Założenia projektu (widziane od strony slave
MIKROPROCESORY i MIKROKONTROLERY Przykład oprogramowania protokołu komunikacyjnego dla łącza równoległego pomiędzy procesorem master i wieloma procesorami slave Założenia projektu (widziane od strony slave
Interfejsy systemów pomiarowych
 Interfejsy systemów pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy układem magistrali (szyny) układem pętli Ze względu na rodzaj transmisji interfejsy możemy podzielić na równoległe
Interfejsy systemów pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy układem magistrali (szyny) układem pętli Ze względu na rodzaj transmisji interfejsy możemy podzielić na równoległe
Magistrale szeregowe
 Magistrale szeregowe Magistrale 2/21 pamięci zewn. ukł.obsługi PAO dekodery adresów kontrolery przerwań timery RTC procesor magistrala systemowa pamięć programu (ROM) pamięć danych (RAM) urz. operatorskie
Magistrale szeregowe Magistrale 2/21 pamięci zewn. ukł.obsługi PAO dekodery adresów kontrolery przerwań timery RTC procesor magistrala systemowa pamięć programu (ROM) pamięć danych (RAM) urz. operatorskie
16. Szeregowy interfejs SPI
 16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym lokalne interfejsy szeregowe
 ze światem zewnętrznym lokalne interfejsy szeregowe") Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym lokalne interfejsy szeregowe Ryszard J. Barczyński, 2009 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały
Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym lokalne interfejsy szeregowe Ryszard J. Barczyński, 2009 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały
Interfejsy szeregowe cz. 2
 Kierunek Elektronika, III rok Systemy Cyfrowe Interfejsy szeregowe cz. 2 Program wykładu Zewnętrzne interfejsy danych RS-232 / 422 / 485 PS/2 CAN, USB, FireWire Wewnętrzne interfejsy danych 1-Wire I2C
Kierunek Elektronika, III rok Systemy Cyfrowe Interfejsy szeregowe cz. 2 Program wykładu Zewnętrzne interfejsy danych RS-232 / 422 / 485 PS/2 CAN, USB, FireWire Wewnętrzne interfejsy danych 1-Wire I2C
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 2 Interfejs szeregowy EIA RS232 3 Transceiver UART Rejestr przesuwny
Współpraca procesora z urządzeniami peryferyjnymi 1 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 2 Interfejs szeregowy EIA RS232 3 Transceiver UART Rejestr przesuwny
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Omówimy przykłady 8-mio bitowego licznika z wyposażenia ADuC812 (CISC 51) oraz mikrokontrolera ATMega128 należącego do rodziny AVR.
 oraz mikrokontrolera ATMega128 należącego do rodziny AVR.") Liczniki/czasomierze (T/C) należą do standardowego składu wewnętrznych układów peryferyjnych (WEP) mikrokontrolerów. Często różnią się znacznie pod względem funkcji, które rozszerzają proste zliczanie
Liczniki/czasomierze (T/C) należą do standardowego składu wewnętrznych układów peryferyjnych (WEP) mikrokontrolerów. Często różnią się znacznie pod względem funkcji, które rozszerzają proste zliczanie
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne.
 Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
SmartDRIVE protokół transmisji szeregowej RS-485
 SmartDRIVE protokół transmisji szeregowej RS-485 Dokumentacja przygotowana przez firmę Gryftec w oparciu o oryginalną dokumentację dostarczoną przez firmę Westline GRYFTEC 1 / 12 1. Przegląd Kontrolery
SmartDRIVE protokół transmisji szeregowej RS-485 Dokumentacja przygotowana przez firmę Gryftec w oparciu o oryginalną dokumentację dostarczoną przez firmę Westline GRYFTEC 1 / 12 1. Przegląd Kontrolery
Expandery wejść MCP23S17 oraz MCP23017
 Expandery wejść MCP23S17 oraz MCP23017 Expander I/O MCP20S17 I2C Piny wyjściowe expanderów MCP23S17 oraz MCP23017 Expander I/O MCP23S17 SPI Podłączenie urządzenia na magistrali SPI z płytą Arduino. Linie
Expandery wejść MCP23S17 oraz MCP23017 Expander I/O MCP20S17 I2C Piny wyjściowe expanderów MCP23S17 oraz MCP23017 Expander I/O MCP23S17 SPI Podłączenie urządzenia na magistrali SPI z płytą Arduino. Linie
Programowanie Układów Logicznych kod kursu: ETD6203. Komunikacja z układami cyfrowymi W dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
KOMPUTEROWE SYSTEMY POMIAROWE
 KOMPUTEROWE SYSTEMY POMIAROWE Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST - ITwE Semestr letni Wykład nr 4 Prawo autorskie Niniejsze
KOMPUTEROWE SYSTEMY POMIAROWE Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST - ITwE Semestr letni Wykład nr 4 Prawo autorskie Niniejsze
Pracownia elektryczno-elektroniczna klasa IV
 Ćwiczenie nr 5 Cel ćwiczenia: Ćwiczenie ma na celu zaznajomienie z metodami odliczania czasu z wykorzystaniem układów czasowo - licznikowych oraz poznanie zasad zgłaszania przerwań i sposobów ich wykorzystywania
Ćwiczenie nr 5 Cel ćwiczenia: Ćwiczenie ma na celu zaznajomienie z metodami odliczania czasu z wykorzystaniem układów czasowo - licznikowych oraz poznanie zasad zgłaszania przerwań i sposobów ich wykorzystywania
petla:... ; etykieta określa adres w pamięci kodu (docelowe miejsce skoku) DJNZ R7, petla
 DJNZ R7, petla") Asembler A51 1. Symbole Nazwy symboliczne Symbol jest nazwą, która może być użyta do reprezentowania wartości stałej numerycznej, wyrażenia, ciągu znaków (tekstu), adresu lub nazwy rejestru. Nazwy symboliczne
Asembler A51 1. Symbole Nazwy symboliczne Symbol jest nazwą, która może być użyta do reprezentowania wartości stałej numerycznej, wyrażenia, ciągu znaków (tekstu), adresu lub nazwy rejestru. Nazwy symboliczne
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Interfejsy. w systemach pomiarowych. Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego
 Interfejsy w systemach pomiarowych Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego Interfejsy w systemach pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy
Interfejsy w systemach pomiarowych Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego Interfejsy w systemach pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
architektura komputerów w 1 1
 8051 Port P2 Port P3 Transm. szeregowa Timery T0, T1 Układ przerwań Rejestr DPTR Licznik rozkazów Pamięć programu Port P0 Port P1 PSW ALU Rejestr B SFR akumulator 8051 STRUKTURA architektura komputerów
8051 Port P2 Port P3 Transm. szeregowa Timery T0, T1 Układ przerwań Rejestr DPTR Licznik rozkazów Pamięć programu Port P0 Port P1 PSW ALU Rejestr B SFR akumulator 8051 STRUKTURA architektura komputerów
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Układ transmisji szeregowej AVR
 Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
CompactPCI. PCI Industrial Computers Manufacturers Group (PICMG)
") PCI Industrial Computers Manufacturers Group (PICMG) nowy standard; nowa jakość komputerów realizujących krytyczne zadania w systemach pracujących w trudnych warunkach; Baza specyfikacji: format kaset
PCI Industrial Computers Manufacturers Group (PICMG) nowy standard; nowa jakość komputerów realizujących krytyczne zadania w systemach pracujących w trudnych warunkach; Baza specyfikacji: format kaset
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
Systemy Wbudowane. Raspberry Pi Sterowanie serwomechanizmem (wersja 2019) Serwomechanizm. Serwomechanizm z silnikiem krokowym
 Serwomechanizm. Serwomechanizm z silnikiem krokowym") Serwomechanizm Możliwość dokładnego sterowania położenia (lub podobnej wartości) za pomocą układu ze sprzężeniem zwrotnym: Systemy Wbudowane Raspberry Pi Sterowanie serwomechanizmem (wersja 2019) Zadajemy
Serwomechanizm Możliwość dokładnego sterowania położenia (lub podobnej wartości) za pomocą układu ze sprzężeniem zwrotnym: Systemy Wbudowane Raspberry Pi Sterowanie serwomechanizmem (wersja 2019) Zadajemy
I 2 C BUS (1) 1 L.Łukasiak: Podstawy Techniki Mikroprocesorowej (materiały pomocnicze)
 1 L.Łukasiak: Podstawy Techniki Mikroprocesorowej (materiały pomocnicze)") I 2 C BUS (1) Protokół komunikacyjny I 2 C BUS został opracowany przez firmę Philips w celu umożliwienia komunikacji między układami scalonymi Magistrala (bus) składa się z dwóch linii dwukierunkowych:
I 2 C BUS (1) Protokół komunikacyjny I 2 C BUS został opracowany przez firmę Philips w celu umożliwienia komunikacji między układami scalonymi Magistrala (bus) składa się z dwóch linii dwukierunkowych:
Programowanie mikrokontrolerów. 5 grudnia 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 5 grudnia 2007 Przerwania Umożliwiają asynchroniczną obsługę różnych zdarzeń, np.: zmiana stanu wejścia, zakończenie przetwarzania analogowo-cyfrowego,
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 5 grudnia 2007 Przerwania Umożliwiają asynchroniczną obsługę różnych zdarzeń, np.: zmiana stanu wejścia, zakończenie przetwarzania analogowo-cyfrowego,
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Prawidłowe zarządzanie procesem technologicznym wymaga systemu pomiarowo-sterującego Zygmunt Kubiak 2 Poziom komunikacyjny Fieldbus Zygmunt Kubiak
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Prawidłowe zarządzanie procesem technologicznym wymaga systemu pomiarowo-sterującego Zygmunt Kubiak 2 Poziom komunikacyjny Fieldbus Zygmunt Kubiak
Ćwiczenie 6 Komunikacja z komputerem (łącze RS232)
") IMiO PW, LPTM, Ćwiczenie 6, Komunikacja z komputerem -1- Ćwiczenie 6 Komunikacja z komputerem (łącze RS232) IMiO PW, LPTM, Ćwiczenie 6, Komunikacja z komputerem -2-1. Cel ćwiczenia Celem ćwiczenia jest
IMiO PW, LPTM, Ćwiczenie 6, Komunikacja z komputerem -1- Ćwiczenie 6 Komunikacja z komputerem (łącze RS232) IMiO PW, LPTM, Ćwiczenie 6, Komunikacja z komputerem -2-1. Cel ćwiczenia Celem ćwiczenia jest
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Programowanie mikrokontrolerów. 15 stycznia 2008
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Ćw. 5. Obsługa portu szeregowego UART w mikrokontrolerach 8051.
 Ćw 5 Obsługa portu szeregowego UART w mikrokontrolerach 8051 Opracowanie: mgr inż Michał Lankosz 1 Wprowadzenie Celem ćwiczenia jest poznanie działania układu transmisji szeregowej UART 2 Niezbędne wiadomości
Ćw 5 Obsługa portu szeregowego UART w mikrokontrolerach 8051 Opracowanie: mgr inż Michał Lankosz 1 Wprowadzenie Celem ćwiczenia jest poznanie działania układu transmisji szeregowej UART 2 Niezbędne wiadomości
Problematyka sieci miejscowej LIN
 Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Obszar rejestrów specjalnych. Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW
 Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW MIKROKONTROLER 85 - wiadomości podstawowe. Schemat blokowy mikrokontrolera 85 Obszar rejestrów specjalnych
Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW MIKROKONTROLER 85 - wiadomości podstawowe. Schemat blokowy mikrokontrolera 85 Obszar rejestrów specjalnych
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Programowanie Mikrokontrolerów. Magistrala I2C (Inter-Integrated Circuit).
.") Programowanie Mikrokontrolerów Magistrala I2C (Inter-Integrated Circuit). mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Marcin Byczuk Komunikacja szeregowa Jakie znamy typy komunikacji szeregowej?
Programowanie Mikrokontrolerów Magistrala I2C (Inter-Integrated Circuit). mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Marcin Byczuk Komunikacja szeregowa Jakie znamy typy komunikacji szeregowej?
Systemy wbudowane Wykład 6 - transmisje szeregowe: UART i pochodne. Komunikacja szeregowa Notes. Rodzaje transmisji Notes. Rodzaje transmisji Notes
 Systemy wbudowane Wykład 6 - transmisje szeregowe: UART i pochodne Przemek Błaśkiewicz 22 kwietnia 2018 1 / 57 Komunikacja szeregowa http://websdr.org 2 / 57 Rodzaje transmisji simplex/sympleks Komunikacja
Systemy wbudowane Wykład 6 - transmisje szeregowe: UART i pochodne Przemek Błaśkiewicz 22 kwietnia 2018 1 / 57 Komunikacja szeregowa http://websdr.org 2 / 57 Rodzaje transmisji simplex/sympleks Komunikacja
KAŻDY Z 8-MIO BITOWYCH PORTÓW MIKROKONTROLERÓW RODZINY 51 MA JEDYNIE REJESTR PORTU: P0, P1, P2, P3, PEŁNIĄ ONE ROLĘ REJESTRÓW DANYCH WE/WY.
 - Port to grupa (8, 16, 32 ) linii wyprowadzeń, które pełnią rolę wyjść/wejść mikrokontrolera. - Jako grupa mają wspólne rejestry, ale zwykle każda z linii ma swoją indywidualną rolę. - Zwykle poszczególne
- Port to grupa (8, 16, 32 ) linii wyprowadzeń, które pełnią rolę wyjść/wejść mikrokontrolera. - Jako grupa mają wspólne rejestry, ale zwykle każda z linii ma swoją indywidualną rolę. - Zwykle poszczególne
. Rodzaje transmisji sygnału i RS-232
 . Rodzaje transmisji sygnału i RS-232 1. Transmisja szeregowa i równoległa Transmisja sygnału może przebiegać w różnoraki sposób. Najbardziej podstawowym z podziałów, jest podział transmisji sygnału na
. Rodzaje transmisji sygnału i RS-232 1. Transmisja szeregowa i równoległa Transmisja sygnału może przebiegać w różnoraki sposób. Najbardziej podstawowym z podziałów, jest podział transmisji sygnału na
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Interfejs urządzeń peryferyjnych
 Interfejs urządzeń peryferyjnych Terminy - Referaty do 08.05.2010 - Egzamin 09.05.2010 lub 22.05.2010 Typy transmisji informacji Transmisja informacji w komputerach odbywa się przy wykorzystaniu magistrali
Interfejs urządzeń peryferyjnych Terminy - Referaty do 08.05.2010 - Egzamin 09.05.2010 lub 22.05.2010 Typy transmisji informacji Transmisja informacji w komputerach odbywa się przy wykorzystaniu magistrali
Wykład 10. Komunikacja
 Interfejsy komunikacji szeregowej Universal Asynchronous Receiver/Transmitter (UART) Synchronous Serial Interface (SSI) Inter-Integrated Circuit (I2C) Ethernet Universal Asynchronous Receiver/Transmitter
Interfejsy komunikacji szeregowej Universal Asynchronous Receiver/Transmitter (UART) Synchronous Serial Interface (SSI) Inter-Integrated Circuit (I2C) Ethernet Universal Asynchronous Receiver/Transmitter
ad a) Konfiguracja licznika T1 Niech nasz program składa się z dwóch fragmentów kodu: inicjacja licznika T1 pętla główna
 Konfiguracja licznika T1 Niech nasz program składa się z dwóch fragmentów kodu: inicjacja licznika T1 pętla główna") Technika Mikroprocesorowa Laboratorium 4 Obsługa liczników i przerwań Cel ćwiczenia: Celem ćwiczenia jest nabycie umiejętności obsługi układów czasowo-licznikowych oraz obsługi przerwań. Nabyte umiejętności
Technika Mikroprocesorowa Laboratorium 4 Obsługa liczników i przerwań Cel ćwiczenia: Celem ćwiczenia jest nabycie umiejętności obsługi układów czasowo-licznikowych oraz obsługi przerwań. Nabyte umiejętności
Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe
 Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe Ryszard J. Barczyński, 2009 2013 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe Ryszard J. Barczyński, 2009 2013 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Architektura Systemów Komputerowych. Transmisja szeregowa danych Standardy magistral szeregowych
 Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
MSP430 w przykładach (8)
") MSP430 w przykładach (8) Transmisja szeregowa UART, SPI W artykule omówimy obsługę interfejsów komunikacyjnych UART oraz SPI w mikrokontrolerze MSP430f1232. Przy okazji podamy sporą porcję informacji teoretycznych.
MSP430 w przykładach (8) Transmisja szeregowa UART, SPI W artykule omówimy obsługę interfejsów komunikacyjnych UART oraz SPI w mikrokontrolerze MSP430f1232. Przy okazji podamy sporą porcję informacji teoretycznych.
System interfejsu RS 232C opracowali P. Targowski i M. Rębarz
 System interfejsu RS 232C opracowali P. Targowski i M. Rębarz Standard RS 232C (Recommended Standard) został ustanowiony w 1969 r. przez Electronic Industries Association. Definiuje on sposób nawiązania
System interfejsu RS 232C opracowali P. Targowski i M. Rębarz Standard RS 232C (Recommended Standard) został ustanowiony w 1969 r. przez Electronic Industries Association. Definiuje on sposób nawiązania
Ultradźwiękowy generator mocy MARP wersja Dokumentacja techniczno-ruchowa
 Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Sp. z o.o. ul. Otwarta 10a PL-50-212 Wrocław tel.: +48 (071) 329 68 54 fax.: +48 (071) 329 68 52 e-mail: optel@optel.pl http://www.optel.pl Ultradźwiękowy generator
Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Sp. z o.o. ul. Otwarta 10a PL-50-212 Wrocław tel.: +48 (071) 329 68 54 fax.: +48 (071) 329 68 52 e-mail: optel@optel.pl http://www.optel.pl Ultradźwiękowy generator
interfejs szeregowy wyświetlaczy do systemów PLC
 LDN SBCD interfejs szeregowy wyświetlaczy do systemów PLC SEM 08.2003 Str. 1/5 SBCD interfejs szeregowy wyświetlaczy do systemów PLC INSTRUKCJA OBSŁUGI Charakterystyka Interfejs SBCD w wyświetlaczach cyfrowych
LDN SBCD interfejs szeregowy wyświetlaczy do systemów PLC SEM 08.2003 Str. 1/5 SBCD interfejs szeregowy wyświetlaczy do systemów PLC INSTRUKCJA OBSŁUGI Charakterystyka Interfejs SBCD w wyświetlaczach cyfrowych
architektura komputerów w 1 1
 8051 Port P2 Port P3 Serial PORT Timers T0, T1 Interrupt Controler DPTR Register Program Counter Program Memory Port P0 Port P1 PSW ALU B Register SFR accumulator STRUCTURE OF 8051 architektura komputerów
8051 Port P2 Port P3 Serial PORT Timers T0, T1 Interrupt Controler DPTR Register Program Counter Program Memory Port P0 Port P1 PSW ALU B Register SFR accumulator STRUCTURE OF 8051 architektura komputerów
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler