MORFOLOGIA W UJĘCIU BIOMECHANICZNYM
|
|
|
- Łucja Maria Pawłowska
- 5 lat temu
- Przeglądów:
Transkrypt
1 MORFOLOGIA W UJĘCIU BIOMECHANICZNYM * geometria * wielkości geometryczne * goniometria * pomiary goniometryczne * struktura układu nośnego człowieka * stopnie swobody * ruchliwość * pary biokinematyczne *
.")
2 Morfologia to dziedzina wiedzy traktująca o kształtach, o budowie zewnętrznej i wewnętrznej roślin i organizmów żywych. Badania biomechaniczne człowieka oprócz analizy pozycji statycznych, ruchu, sterowania obejmują w pierwszej kolejności ich budowę (morfologię). Do badań niezbędne są dane morfologiczne dotyczące poruszającego się obiektu, a przede wszystkim o jego konstrukcji, parametrach geometrycznych i inercyjnych.
3 Człowiek, jako żywy obiekt pomiarów wyróżnia się wieloma cechami, wpływającymi na wynik badań. Główne z nich to: Zmienność krótkoterminowa, np. zmienny tryb aktywności dobowej, mikrocykle treningowe długoterminowa (ontogenetyczna), zmienność osobnicza, która wymaga systematycznej weryfikacji i aktualizacji pomiarów. Efektem a zarazem mechanizmem kontrolnym są tzw. normy rozwojowe mające na celu określenie tempa i poziomu rozwoju. Ruch powoduje, że pomiary wykonuje się w warunkach niestabilności. Wyjątkiem są pomiary, które z założenia wymagają ruchu. Nieforemność Geometryczna nieforemność ciała człowieka stwarza trudności w określaniu jego wymiarów, np. określenia powierzchni skóry lub objętości części ciała.
4 Różnorodność każdy człowiek jest inny i ta cecha wymaga indywidualizacji pomiarów, np. wrażliwość badanego na specyficzne bodźce progowe. Niedostępność dotyczy głównie sfery psychicznej człowieka: myśli, uczuć, nastawienia do pomiarów, współdziałania lub przeciwdziałaniach w badaniach. niedostępność pomiarowa narządów wewnętrznych, antropometria wykorzystuje takie metody jak: rentgenografia, ultrasonografia, tomografia komputerowa. Stan zdrowia pomiary powinny być przeprowadzane na zdrowych osobnikach. Stan choroby może znacznie zniekształcić wyniki badań. Stan psychiczny współdziałanie w badaniach pozwala osiągnąć bardziej wiarygodne i dokładne wyniki, przeciwdziałanie, lub wręcz niechęć może spowodować ich fałszowanie

5 Geometria Wielkości geometryczne ciała człowieka związane z mechaniką jego budowy, to: 1. wielkości liniowe prostoliniowe długości odcinków krzywoliniowe długości łuków i obwody 2. wielkości płaszczyznowe pola powierzchni np. powierzchnia czołowa, powierzchnia stopy kąty płaskie kąty ciała i zakresy ruchu w stawach 3. wielkości przestrzenne objętości bryły, np. objętość uda, klatki piersiowej, kąty przestrzenne; pojemności zbiorniki: pojemność wyrzutowa serca, pojemność życiowa płuc, pojemność zbiornika krwi itp.
6 Wielkości geometryczne Długości ciała mogą być: bezwzględne pomiary pomiędzy krańcami części ciała antropologiczne pomiędzy punktami antropologicznymi kinetyczne pomiędzy osiami w stawach Pola powierzchni ciała dotyczyć mogą: pomiarów oporu ośrodka powierzchnie oporowe określania równowagi ciała pole podparcia pomiarów kątowych ciała zakresy ruchu w stawach, kąty ciała. Objętość ciała wraz z jego gęstością w znaczący sposób wpływa na określenie wyporności ciała, ma znaczenie przy ocenie składu tkankowego ciała.
.")
7 Goniometria dział geometrii zajmujący się pomiarami kątów stawowych Zakres ruchu w stawie czyli jego ruchomość jest określana poprzez kątową odległość pomiędzy skrajnymi położeniami ogniw kostnych tworzących staw (np. od pozycji neutralnej do maksymalnego zgięcia w stawie). Do pomiaru zakresu ruchu w stawach stosuje się przyrządy, nazywane goniometrami (kątomierzami).


8 Goniometria




9 Pomiary goniometryczne Pomiary ciała człowieka są częścią nauki o człowieku - antropologii Pomiary goniometryczne stanowią jedno z podstawowych kryteriów przy określaniu stopnia ograniczenia możliwości ruchowych człowieka, np. przy reumatoidalnym zapaleniu stawów. Pomiary goniometryczne są ważnym ogniwem przy selekcji do wybranych dyscyplin sportowych.

 2.")


10 Pomiary goniometryczne Zakres ruchu w stawie można badać analizować zależnie od celu badań jako: i 1. zakres kostny (największy, ograniczony jedynie budową stawu i występujących elementów dodatkowych) 2. zakres bierny (uzyskiwany w warunkach normalnej aktywności, przy pomocy siły zewnętrznej siła ciężkości, współćwiczącego, dodatkowych obciążeń) 3. zakres czynny (jest najmniejszy, uzyskiwany wyłącznie siłą własnych mięśni).
11 Płaszczyzny ruchu stawów i ciała człowieka Wyróżnia się trzy płaszczyzny ruchu: strzałkową albo przednio-tylną - dzieli ciało na stronę prawą i lewą, czołową albo boczną - dzieli ciało na część przednią i tylną, poprzeczną albo horyzontalną - dzieli ciało na część górną i dolną.
12 Płaszczyzny ruchu stawów i ciała człowieka Wyróżnia się trzy osie ruchu: czołowa - od jednego do drugiego boku ciała; ruch w płaszczyźnie strzałkowej, strzałkowa - od przodu do tyłu ciała; ruch w płaszczyźnie czołowej, pionowa - wzdłuż ciała w kierunku podłoża; ruch w płaszczyźnie poprzecznej.
13 Płaszczyzny ruchu stawów i ciała człowieka
14 Struktura układu nośnego człowieka Układ sterowania - centralny i obwodowy układ nerwowy, układ wydzielania dokrewnego (hormonalny) oraz narządy zmysłów Układ zasilania pokarmowy, oddechowy, krwionośny Układ redukcyjny wydzielniczy i wydalniczy Układ bezpieczeństwa termoregulacyjny, snu i czuwania, wrażliwości na bodźce, narządy ochronne: budowa kostna, skóra wraz z jej tworami dodatkowymi, układy immunologiczne itp. Układ napędowy układ mięśni szkieletowych, narządowych i naczyniowych Modelowa, ergonomiczna budowa ciała
15 Struktura podstawowa terminologia ogniwo pojedynczy, nieodkształcalny element ciała ludzkiego, np. udo, paliczek, żuchwa, żebro węzeł miejsce połączenia dwóch ogniw (staw, połączenie półścisłe, połączenie ścisłe) para biokinematyczna dwa ogniwa połączone węzłem łańcuch biokinematyczny szereg ogniw połączonych węzłami otwarty łańcuch kończący się ogniwem, np. kończyna górna od łopatki do dłoni zamknięty po każdym ogniwie łańcucha następuje węzeł; łańcuch zamknięty maże być naturalny (klatka piersiowa w przekroju poprzecznym) lub sztuczny (zwis oburącz na drążku gimnastycznym
16 Struktura podstawowa terminologia stopień swobody możliwość wykonania ruchu względnego w połączeniu Ciało fizycznie swobodne dysponuje 6 stopniami swobody: 3 w ruchu postępowym, 3 w ruchu obrotowym. 1 6 Człowiek jako biomaszyna jest ciałem swobodnym, natomiast jego stawy dysponują co najwyżej 3 stopniami swobody w ruchu obrotowym, z wykluczeniem ruchu postępowego
17 Struktura podstawowa terminologia więź ograniczenie, wykluczenie ruchu w jakimś kierunku lub wokół jakieś osi ruchliwość łańcucha biokinetycznego suma stopni swobody występujących w połączeniach łańcucha, liczona według wzoru: klasa pary biokinematycznej liczba równa liczbie więzi (liczba odjętych stopni swobody)
18 Klasyfikacja par biokinematycznych Klasa pary Liczba więzi Liczba stopni swobody VI 6 0 Przykłady Połączenie ścisłe: więzozrosty, chrząstkozrosty, kościozrosty, szwy, wklinowanie Symbol V 5 1 IV 4 2 III 3 3 Stawy jednoosiowe: obrotowe, zawiasowe, bloczkowe, śrubowy, nieregularne Stawy dwuosiowe: eliptyczne, kłykciowe, łokciowy (całość), skokowy (górny i dolny), siodełkowaty Stawy wieloosiowe: kulisty wolny, kulisty panewkowy, kręgosłup jako całość, stawy nietypowe
 29 par IV klasy (2 stopnie swobody) 33 pary V klasy (1 stopień swobody) 81")
19 Schemat strukturalny szkieletu człowieka Łańcuch biokinematyczny układu ruchu człowieka składa się ze 144 członów ruchomych (względem podstawy czaszki), połączonych w 143 pary kinematyczne o ruchliwości: III klasy (3 stopnie swobody) 29 par IV klasy (2 stopnie swobody) 33 pary V klasy (1 stopień swobody) 81 par

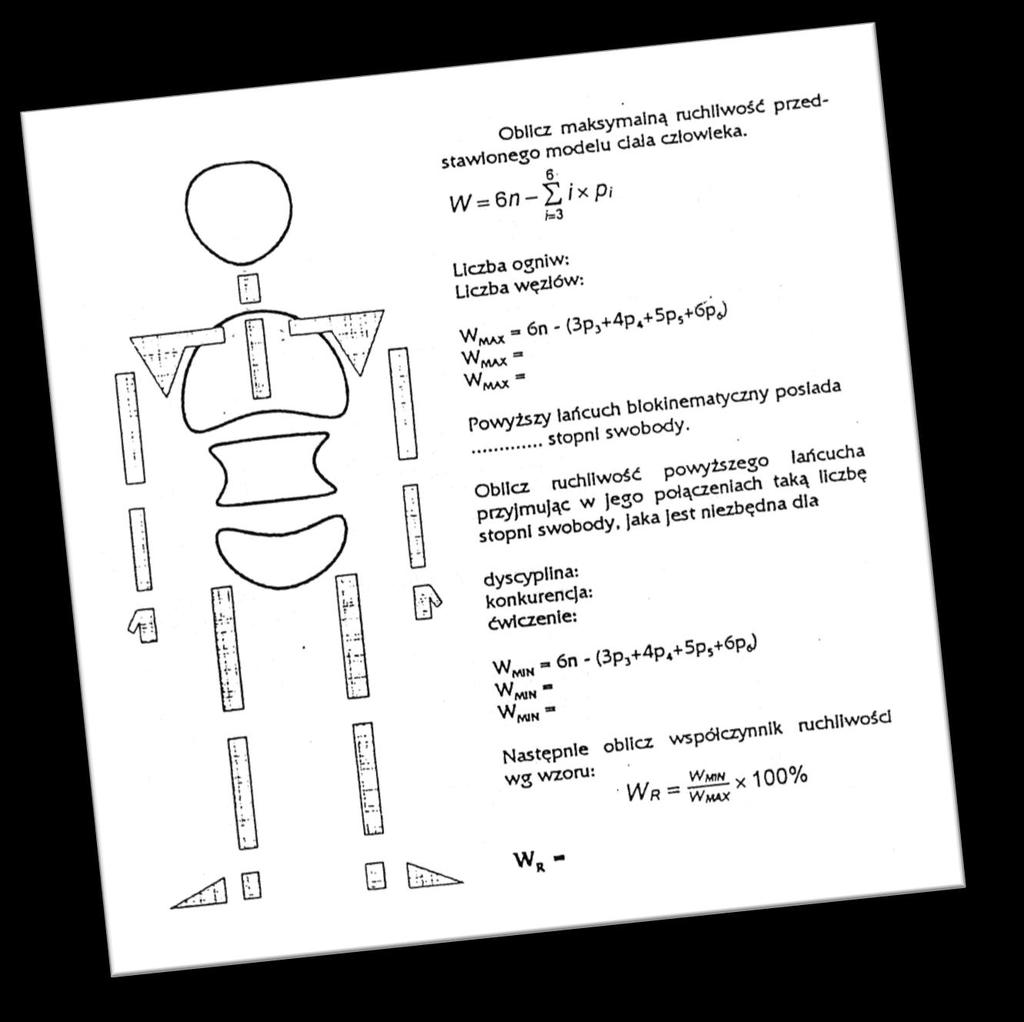
20 Ruchliwość połączeń przykłady obliczeń przykłady zadań z kolokwium

+(IV*6)+(V*11)+(VI*4)] W= 126-(0+24+55+24) W= 126-103=23")
21 A - uproszczony model strukturalny ciała o 22 ogniwach B klasy par podano dla minimalnej, niezbędnej ruchliwości ciała jako łańcucha biokinetycznego dla wyczynowego biegacza W = 126 [(III*0)+(IV*6)+(V*11)+(VI*4)] W= 126-( ) W= =23 stopnie swobody
22 Praca zaliczeniowa
KINEMATYKA POŁĄCZEŃ STAWOWYCH
 KINEMATYKA POŁĄCZEŃ STAWOWYCH RUCHOMOŚĆ STAWÓW Ruchomość określa zakres ruchów w stawach, jedną z funkcjonalnych właściwości połączeń stawowych. WyróŜniamy ruchomość: czynną zakres ruchu jaki uzyskamy
KINEMATYKA POŁĄCZEŃ STAWOWYCH RUCHOMOŚĆ STAWÓW Ruchomość określa zakres ruchów w stawach, jedną z funkcjonalnych właściwości połączeń stawowych. WyróŜniamy ruchomość: czynną zakres ruchu jaki uzyskamy
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
 Wydawnictwo
Wydawnictwo STEROWANIE A REGULACJA
 STEROWANIE A REGULACJA Sterowanie to proces nerwowo-mięśniowy (dwukierunkowy) - współdziałanie ukł. nerwowego z ukł. mięśniowym - podporządkowanie ukł. mięśniowego (ukł. sterowania) układowi nerwowemu
STEROWANIE A REGULACJA Sterowanie to proces nerwowo-mięśniowy (dwukierunkowy) - współdziałanie ukł. nerwowego z ukł. mięśniowym - podporządkowanie ukł. mięśniowego (ukł. sterowania) układowi nerwowemu
MECHANIKA KOŃCZYNY GÓRNEJ OBRĘCZ I STAW ŁOKCIOWY
 MECHANIKA KOŃCZYNY GÓRNEJ OBRĘCZ I STAW ŁOKCIOWY POŁĄCZENIA KOŃCZYNY GÓRNEJ OBRĘCZ KOŃCZYNY GÓRNEJ Kończyna górna jest połączona ze szkieletem tułowia za pomocą obręczy. W tym połączeniu znajdują się trzy
MECHANIKA KOŃCZYNY GÓRNEJ OBRĘCZ I STAW ŁOKCIOWY POŁĄCZENIA KOŃCZYNY GÓRNEJ OBRĘCZ KOŃCZYNY GÓRNEJ Kończyna górna jest połączona ze szkieletem tułowia za pomocą obręczy. W tym połączeniu znajdują się trzy
1. Zaznacz w poniższych zdaniach określenia charakteryzujące układ ruchu. (0 1)
") Sprawdzian a Imię i nazwisko Klasa Liczba punktów Ocena Test podsumowujący dział X Ruch Masz przed sobą test składający się z 15 zadań. Przy każdym poleceniu podano liczbę punktów możliwych do uzyskania.
Sprawdzian a Imię i nazwisko Klasa Liczba punktów Ocena Test podsumowujący dział X Ruch Masz przed sobą test składający się z 15 zadań. Przy każdym poleceniu podano liczbę punktów możliwych do uzyskania.
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Spis Tabel i rycin. Spis tabel
 Spis Tabel i rycin Spis tabel 1. Podział stawów ze względu na ilość osi ruchów i ukształtowanie powierzchni stawowych. 20 2. Nazwy ruchów w stawach człowieka w pozycji anatomicznej..... 21 3. Zestawienie
Spis Tabel i rycin Spis tabel 1. Podział stawów ze względu na ilość osi ruchów i ukształtowanie powierzchni stawowych. 20 2. Nazwy ruchów w stawach człowieka w pozycji anatomicznej..... 21 3. Zestawienie
Spis treści. Wstęp... 7
 Wstęp.............................................................. 7 I. Plan budowy ciała ludzkiego... 9 Okolice ciała ludzkiego........................................................................
Wstęp.............................................................. 7 I. Plan budowy ciała ludzkiego... 9 Okolice ciała ludzkiego........................................................................
Funkcjonowanie narządu ruchu. Kinga Matczak
 Funkcjonowanie narządu ruchu Kinga Matczak Narząd ruchu zapewnia człowiekowi utrzymanie prawidłowej postawy ciała, dowolne zmiany pozycji i przemieszczanie się w przestrzeni. Ze względu na budowę i właściwości
Funkcjonowanie narządu ruchu Kinga Matczak Narząd ruchu zapewnia człowiekowi utrzymanie prawidłowej postawy ciała, dowolne zmiany pozycji i przemieszczanie się w przestrzeni. Ze względu na budowę i właściwości
ANATOMIA. mgr Małgorzata Wiśniewska Łowigus
 ANATOMIA mgr Małgorzata Wiśniewska Łowigus Wśród nauk biologicznych, zajmujących się wszelkimi formami życia, wyróżnia się dwa podstawowe działy: morfologię, fizjologię. MORFOLOGIA - zajmuje się poznaniem
ANATOMIA mgr Małgorzata Wiśniewska Łowigus Wśród nauk biologicznych, zajmujących się wszelkimi formami życia, wyróżnia się dwa podstawowe działy: morfologię, fizjologię. MORFOLOGIA - zajmuje się poznaniem
Z poprzedniego wykładu:
 Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Slajd 1. Slajd 2. Slajd 3 OGÓLNA BUDOWA I MECHANIKA KLATKI PIERSIOWEJ ŻEBRO
 Slajd 1 Slajd 2 Slajd 3 OGÓLNA BUDOWA I MECHANIKA KLATKI PIERSIOWEJ W skład szkieletu klatki piersiowej wchodzi: 12 kręgów piersiowych, 12 par żeber i mostek. trzon mostka ŻEBRO Jest kością długą w kształcie
Slajd 1 Slajd 2 Slajd 3 OGÓLNA BUDOWA I MECHANIKA KLATKI PIERSIOWEJ W skład szkieletu klatki piersiowej wchodzi: 12 kręgów piersiowych, 12 par żeber i mostek. trzon mostka ŻEBRO Jest kością długą w kształcie
OGÓLNA BUDOWA I MECHANIKA KLATKI PIERSIOWEJ
 OGÓLNA BUDOWA I MECHANIKA KLATKI PIERSIOWEJ SZKIELET KLATKI PIERSIOWEJ W skład szkieletu klatki piersiowej wchodzi: 12 kręgów piersiowych, 12 par żeber i mostek. trzon mostka ŻEBRO Jest kością długą w
OGÓLNA BUDOWA I MECHANIKA KLATKI PIERSIOWEJ SZKIELET KLATKI PIERSIOWEJ W skład szkieletu klatki piersiowej wchodzi: 12 kręgów piersiowych, 12 par żeber i mostek. trzon mostka ŻEBRO Jest kością długą w
Spis treści. Wstęp. I. Plan budowy ciała ludzkiego 9 Okolice ciata ludzkiego Układy narządów *P. Określenie orientacyjne w przestrzeni
 Wstęp 7 I. Plan budowy ciała ludzkiego 9 Okolice ciata ludzkiego Układy narządów *P Określenie orientacyjne w przestrzeni Płaszczyzny ciała Osie ciała II. Układ bierny i czynny ruchu (osteologia, syndesmołogia,
Wstęp 7 I. Plan budowy ciała ludzkiego 9 Okolice ciata ludzkiego Układy narządów *P Określenie orientacyjne w przestrzeni Płaszczyzny ciała Osie ciała II. Układ bierny i czynny ruchu (osteologia, syndesmołogia,
OPIS MODUŁU KSZTAŁCENIA
 Załącznik nr 9 do Zarządzenia Rektora ATH Nr 514/2011/2012z dnia 14 grudnia 2011 r. Druk DNiSS nr PK_IIIF OPIS MODUŁU KSZTAŁCENIA NAZWA PRZEDMIOTU/MODUŁU KSZTAŁCENIA: Anatomia Kod przedmiotu: 3 Rodzaj
Załącznik nr 9 do Zarządzenia Rektora ATH Nr 514/2011/2012z dnia 14 grudnia 2011 r. Druk DNiSS nr PK_IIIF OPIS MODUŁU KSZTAŁCENIA NAZWA PRZEDMIOTU/MODUŁU KSZTAŁCENIA: Anatomia Kod przedmiotu: 3 Rodzaj
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
SPIS TREŚCI. Część ogólna I. ROZWÓJ POŁĄCZEŃ KOŚCI 9
 Przedmowa PRZEDMOWA Nauka o budowie połączeń kości i więzadłach zwana arthrologiąi syndesmologią" stanowi dział anatomii stosunkowo mało akcentowany w ramach nauczania tego przedmiotu. Sama nazwa łacińska
Przedmowa PRZEDMOWA Nauka o budowie połączeń kości i więzadłach zwana arthrologiąi syndesmologią" stanowi dział anatomii stosunkowo mało akcentowany w ramach nauczania tego przedmiotu. Sama nazwa łacińska
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
INSTRUKCJA DO ĆWICZENIA NR 19
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 19 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA TECHNICZNA ALIZA PŁASKIEGO DOWOLNEGO UKŁADU SIŁ NA PODSTAWIE OBCIĄŻENIA
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 19 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA TECHNICZNA ALIZA PŁASKIEGO DOWOLNEGO UKŁADU SIŁ NA PODSTAWIE OBCIĄŻENIA
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
POŁĄCZENIA KOŚCI połączenia ścisłe połączenia wolne/ruchome (stawy)
") POŁĄCZENIA KOŚCI połączenia ścisłe połączenia wolne/ruchome (stawy) POŁĄCZENIA ŚCISŁE więzozrosty chrząstkozrosty kościozrosty WIĘZOZROSTY więzozrost włóknisty więzozrost sprężysty szew szew gładki/prosty
POŁĄCZENIA KOŚCI połączenia ścisłe połączenia wolne/ruchome (stawy) POŁĄCZENIA ŚCISŁE więzozrosty chrząstkozrosty kościozrosty WIĘZOZROSTY więzozrost włóknisty więzozrost sprężysty szew szew gładki/prosty
ZOFIA IGNASIAK WYDANIE II ELSEYIER URBAN&PARTNER
 ZOFIA IGNASIAK ELSEYIER URBAN&PARTNER WYDANIE II Zofia Ignasiak Anatomia układu ruchu Wydanie II Elsevier Urban & Partner Wrocław \ Spis treści J Wstęp... I. Plan budowy ciała ludzkiego... Okolice ciała
ZOFIA IGNASIAK ELSEYIER URBAN&PARTNER WYDANIE II Zofia Ignasiak Anatomia układu ruchu Wydanie II Elsevier Urban & Partner Wrocław \ Spis treści J Wstęp... I. Plan budowy ciała ludzkiego... Okolice ciała
2. Plan wynikowy klasa druga
 Plan wynikowy klasa druga budowa i funkcjonowanie ciała człowieka ział programu Materiał kształcenia L.g. Wymagania podstawowe Uczeń: Kat. Wymagania ponadpodstawowe Uczeń: Kat. Pozycja systematyczna 3
Plan wynikowy klasa druga budowa i funkcjonowanie ciała człowieka ział programu Materiał kształcenia L.g. Wymagania podstawowe Uczeń: Kat. Wymagania ponadpodstawowe Uczeń: Kat. Pozycja systematyczna 3
Załącznik Nr 1 KARTA PRZEDMIOTU. 1. NAZWA PRZEDMIOTU: Biologiczne podstawy człowieka. 2. KIERUNEK: Turystyka i rekreacja 3.
 Załącznik Nr 1 KARTA PRZEDMIOTU 1. NAZWA PRZEDMIOTU: Biologiczne podstawy człowieka 2. KIERUNEK: Turystyka i rekreacja 3. POZIOM STUDIÓW: I 4. ROK/ SEMESTR STUDIÓW: I/I 5. LICZBA PUNKTÓW ECTS: 3 6. LICZBA
Załącznik Nr 1 KARTA PRZEDMIOTU 1. NAZWA PRZEDMIOTU: Biologiczne podstawy człowieka 2. KIERUNEK: Turystyka i rekreacja 3. POZIOM STUDIÓW: I 4. ROK/ SEMESTR STUDIÓW: I/I 5. LICZBA PUNKTÓW ECTS: 3 6. LICZBA
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
I PORUSZAM SIĘ, ODDYCHAM I CZUJĘ
 I PORUSZAM SIĘ, ODDYCHAM I CZUJĘ Zadanie 1. Dokończ zdania. A. Serce i wątroba to przykłady.... B. Najmniejszym elementem budującym organizm człowieka jest....... C. Zespół komórek podobnych do siebie
I PORUSZAM SIĘ, ODDYCHAM I CZUJĘ Zadanie 1. Dokończ zdania. A. Serce i wątroba to przykłady.... B. Najmniejszym elementem budującym organizm człowieka jest....... C. Zespół komórek podobnych do siebie
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Modelowanie biomechaniczne. Dr inż. Sylwia Sobieszczyk Politechnika Gdańska Wydział Mechaniczny KMiWM 2005/2006
 Modelowanie biomechaniczne Dr inż. Sylwia Sobieszczyk Politechnika Gdańska Wydział Mechaniczny KMiWM 2005/2006 Zakres: Definicja modelowania Modele kinematyczne ruch postępowy, obrotowy, przemieszczenie,
Modelowanie biomechaniczne Dr inż. Sylwia Sobieszczyk Politechnika Gdańska Wydział Mechaniczny KMiWM 2005/2006 Zakres: Definicja modelowania Modele kinematyczne ruch postępowy, obrotowy, przemieszczenie,
PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE
 PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE Podstawy statyki budowli: Pojęcia podstawowe Model matematyczny, w odniesieniu do konstrukcji budowlanej, opisuje ją za pomocą zmiennych. Wartości zmiennych
PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE Podstawy statyki budowli: Pojęcia podstawowe Model matematyczny, w odniesieniu do konstrukcji budowlanej, opisuje ją za pomocą zmiennych. Wartości zmiennych
I nforma c j e ogólne. Ergonomia. Nie dotyczy. Wykłady 40 godz. Dr hab. n. zdr. Anna Lubkowska
 S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu rgonomia Przedmiot do wyboru
S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu rgonomia Przedmiot do wyboru
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Podkowiańska Wyższa Szkoła Medyczna im. Z. i J. Łyko Syllabus przedmiotowy 2017/ /2022 r.
 Podkowiańska Wyższa Szkoła Medyczna im. Z. i J. Łyko Syllabus przedmiotowy 2017/18-2021/2022 r. Wydział Fizjoterapii Kierunek studiów Fizjoterapia Specjalność ----------- Forma studiów Stacjonarne Stopień
Podkowiańska Wyższa Szkoła Medyczna im. Z. i J. Łyko Syllabus przedmiotowy 2017/18-2021/2022 r. Wydział Fizjoterapii Kierunek studiów Fizjoterapia Specjalność ----------- Forma studiów Stacjonarne Stopień
BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA
 Praca zbiorowa pod redakcją Dagmary Tejszerskiej, Eugeniusza Świtońskiego, Marka Gzika BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA BIOMECHANIKA narządu ruchu człowieka Praca zbiorowa pod redakcją: Dagmary Tejszerskiej
Praca zbiorowa pod redakcją Dagmary Tejszerskiej, Eugeniusza Świtońskiego, Marka Gzika BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA BIOMECHANIKA narządu ruchu człowieka Praca zbiorowa pod redakcją: Dagmary Tejszerskiej
Dane ergonomiczne do projektowania stanowisk pracy. Strefa pracy kończyn górnych. Wymiary. PN-N 08018: 1991
 Dane ergonomiczne do projektowania stanowisk pracy. Strefa pracy kończyn górnych. Wymiary. PN-N 08018: 1991 Strefy pracy kończyn górnych [PN-91/N 08018] Normalizacja PN-91/N-08018 strefy pracy kończyn
Dane ergonomiczne do projektowania stanowisk pracy. Strefa pracy kończyn górnych. Wymiary. PN-N 08018: 1991 Strefy pracy kończyn górnych [PN-91/N 08018] Normalizacja PN-91/N-08018 strefy pracy kończyn
PL 214592 B1. POLITECHNIKA CZĘSTOCHOWSKA, Częstochowa, PL 14.03.2011 BUP 06/11
 PL 214592 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214592 (13) B1 (21) Numer zgłoszenia: 388915 (51) Int.Cl. G01B 5/28 (2006.01) G01C 7/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 214592 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214592 (13) B1 (21) Numer zgłoszenia: 388915 (51) Int.Cl. G01B 5/28 (2006.01) G01C 7/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego)
") 2019-09-01 FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego) Treści z podstawy programowej przedmiotu POZIOM ROZSZERZONY (PR) SZKOŁY BENEDYKTA Podstawa programowa FIZYKA KLASA 1 LO (4-letnie po szkole
2019-09-01 FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego) Treści z podstawy programowej przedmiotu POZIOM ROZSZERZONY (PR) SZKOŁY BENEDYKTA Podstawa programowa FIZYKA KLASA 1 LO (4-letnie po szkole
SKOLIOZY. Slajd 1. Slajd 2. Slajd 3 RODZAJ SKOLIOZY. BOCZNE SKRZYWIENIE KRĘGOSŁUPA (scoliosis)
") Slajd 1 Slajd 2 Slajd 3 SKOLIOZY BOCZNE SKRZYWIENIE KRĘGOSŁUPA (scoliosis) Jest to odchylenie osi anatomicznej kręgosłupa od mechanicznej w trzech płaszczyznach: czołowej, strzałkowej i poprzecznej. Skolioza
Slajd 1 Slajd 2 Slajd 3 SKOLIOZY BOCZNE SKRZYWIENIE KRĘGOSŁUPA (scoliosis) Jest to odchylenie osi anatomicznej kręgosłupa od mechanicznej w trzech płaszczyznach: czołowej, strzałkowej i poprzecznej. Skolioza
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") Załącznik nr 4 do Uchwały Senatu nr 430/01/2015 SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016 2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika Kod przedmiotu/
Załącznik nr 4 do Uchwały Senatu nr 430/01/2015 SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016 2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika Kod przedmiotu/
Pomiar siły parcie na powierzchnie płaską
 Pomiar siły parcie na powierzchnie płaską Wydawać by się mogło, że pomiar wartości parcia na powierzchnie płaską jest technicznie trudne. Tak jest jeżeli wyobrazimy sobie pomiar na ściankę boczną naczynia
Pomiar siły parcie na powierzchnie płaską Wydawać by się mogło, że pomiar wartości parcia na powierzchnie płaską jest technicznie trudne. Tak jest jeżeli wyobrazimy sobie pomiar na ściankę boczną naczynia
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia
 modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia") Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia Przedmiot: Mechanika Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: IM 1 S 0 2 24-0_1 Rok: I Semestr: 2 Forma studiów:
Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia Przedmiot: Mechanika Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: IM 1 S 0 2 24-0_1 Rok: I Semestr: 2 Forma studiów:
GIMNASTYKA KOMPENSACYJNO -
 Slajd 1 Slajd 2 Slajd 3 GIMNASTYKA KOMPENSACYJNO - KOREKCYJNA WPROWADZENIE Zadania gimnastyki Gimnastyka wyrównawcza to zasób i rodzaj ćwiczeń, które mają skompensować pewien niedobór ruchowy zarówno pod
Slajd 1 Slajd 2 Slajd 3 GIMNASTYKA KOMPENSACYJNO - KOREKCYJNA WPROWADZENIE Zadania gimnastyki Gimnastyka wyrównawcza to zasób i rodzaj ćwiczeń, które mają skompensować pewien niedobór ruchowy zarówno pod
Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku Fizjoterapia
 Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku Fizjoterapia 1. Ćwiczenie wprowadzające: Wielkości fizyczne i błędy pomiarowe. Pomiar wielkości fizjologicznych 2. Prąd elektryczny: Pomiar oporu
Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku Fizjoterapia 1. Ćwiczenie wprowadzające: Wielkości fizyczne i błędy pomiarowe. Pomiar wielkości fizjologicznych 2. Prąd elektryczny: Pomiar oporu
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
I nforma c j e ogólne. Biomechanika. Nie dotyczy. Pierwszy. Wykłady - 30 godz., Ćwiczenia 20 godz. Dr hab. n. zdr. Anna Lubkowska
 S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika Obowiązkowy Wydział
S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika Obowiązkowy Wydział
Układ szkieletowy Iza Falęcka
 Układ szkieletowy Iza alęcka Zaznacz podpunkt, w którym nie wymieniono kości krótkich. a) kość łokciowa, kość miednicza, rzepka b) kość krzyżowa, paliczki, łopatka c) kość nadgarstka, kręgosłup, kość śródręcza
Układ szkieletowy Iza alęcka Zaznacz podpunkt, w którym nie wymieniono kości krótkich. a) kość łokciowa, kość miednicza, rzepka b) kość krzyżowa, paliczki, łopatka c) kość nadgarstka, kręgosłup, kość śródręcza
MECHANIKA 2 KINEMATYKA. Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
S YL AB US MODUŁ U ( PRZEDMIOTU) I nforma cje ogólne. Anatomia palpacyjna
 I nforma cje ogólne. Anatomia palpacyjna") S YL AB US MODUŁ U ( PRZEDMIOTU) I nforma cje ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Anatomia palpacyjna Obowiązkowy
S YL AB US MODUŁ U ( PRZEDMIOTU) I nforma cje ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Anatomia palpacyjna Obowiązkowy
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Zdzisław Marek Zagrobelny Woźniewski W ro c ła w iu
 Zdzisław Zagrobelny Marek Woźniewski Wrocławiu Akademia Wychowania Fizycznego we Wrocławiu Zdzisław Z agrobelny M arek W oźeiewsm BIOMECHANIKA KLINICZNA część ogólna Wrocław 2007 Spis treści Podstawy biomfci
Zdzisław Zagrobelny Marek Woźniewski Wrocławiu Akademia Wychowania Fizycznego we Wrocławiu Zdzisław Z agrobelny M arek W oźeiewsm BIOMECHANIKA KLINICZNA część ogólna Wrocław 2007 Spis treści Podstawy biomfci
TEORIA MASZYN MECHANIZMÓW ĆWICZENIA LABORATORYJNE Badanie struktury modeli mechanizmów w laboratorium.
 MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
Wady postawy. Podział i przyczyna powstawania wad postawy u dziecka. Najczęściej spotykamy podział wad postawy i budowy ciała na dwie grupy:
 Wady postawy Wada postawy jest pojęciem zbiorczym i niedostatecznie sprecyzowanym. Obejmuje szereg osobniczych odchyleń postawy ciała od wzorców uznawanych za normę stosowną do wieku, płci, typów budowy,
Wady postawy Wada postawy jest pojęciem zbiorczym i niedostatecznie sprecyzowanym. Obejmuje szereg osobniczych odchyleń postawy ciała od wzorców uznawanych za normę stosowną do wieku, płci, typów budowy,
Wymagania szczegółowe dla klasy 4 szkoły podstawowej
 Wymagania edukacyjne z wychowania fizycznego dla ośmioletniej szkoły podstawowej klasy 4 8 Wymagania szczegółowe dla klasy 4 szkoły podstawowej siła mięśni brzucha siady z leżenia tyłem wykonywane w czasie
Wymagania edukacyjne z wychowania fizycznego dla ośmioletniej szkoły podstawowej klasy 4 8 Wymagania szczegółowe dla klasy 4 szkoły podstawowej siła mięśni brzucha siady z leżenia tyłem wykonywane w czasie
szkielet tułowia widok od przodu klatka piersiowa żebra mostek kręgi piersiowe kręgosłup (33-34 kręgi)
") Kości tułowia szkielet tułowia kręgosłup (33-34 kręgi) klatka piersiowa żebra mostek kręgi piersiowe widok od przodu kręgosłup czaszka odcinek szyjny C 1-7 (1-7) - (lordoza szyjna) klatka piersiowa odcinek
Kości tułowia szkielet tułowia kręgosłup (33-34 kręgi) klatka piersiowa żebra mostek kręgi piersiowe widok od przodu kręgosłup czaszka odcinek szyjny C 1-7 (1-7) - (lordoza szyjna) klatka piersiowa odcinek
wm OKREŚLANIE DŁUGOŚCI, SPIS TREŚCI 1. PODSTAWOWE ZWROTY LICZEBNIKI CZAS 22 OBJĘTOŚCI, WAGI 30
 1. PODSTAWOWE ZWROTY 11 1.1. Formularze - słowniczek 11 1.2. Powitanie 11 1.3. Pożegnanie 12 1.4. Najpotrzebniejsze zwroty 12 1.5. Podstawowe pytania 13 1.6. Próby porozumiewania się 14 1.7. Zwroty grzecznościowe
1. PODSTAWOWE ZWROTY 11 1.1. Formularze - słowniczek 11 1.2. Powitanie 11 1.3. Pożegnanie 12 1.4. Najpotrzebniejsze zwroty 12 1.5. Podstawowe pytania 13 1.6. Próby porozumiewania się 14 1.7. Zwroty grzecznościowe
POŁĄCZENIA KOŃCZYNY GÓRNEJ
 Slajd 1 Slajd 2 Slajd 3 POŁĄCZENIA KOŃCZYNY GÓRNEJ POŁĄCZENIE Z TUŁOWIEM Kończyna górna jest połączona z kośćcem tułowia za pomocą obręczy złożonej z obojczyka i łopatki. W tym połączeniu znajdują się
Slajd 1 Slajd 2 Slajd 3 POŁĄCZENIA KOŃCZYNY GÓRNEJ POŁĄCZENIE Z TUŁOWIEM Kończyna górna jest połączona z kośćcem tułowia za pomocą obręczy złożonej z obojczyka i łopatki. W tym połączeniu znajdują się
ANALIZA KINEMATYCZNA PALCÓW RĘKI
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
Tadeusz Kasperczyk WADY POSTAWY CIAŁA. diagnostyka i leczenie KRAKÓW 2004
 TADEUSZ KASPERCZYK Tadeusz Kasperczyk i WADY POSTAWY CIAŁA diagnostyka i leczenie KRAKÓW 2004 t Spis treści Od A u to ra... 7 Rozdział I Wiadomości w stępne...9 Pojęcia: postawa prawidłowa, postawa wadliwa,
TADEUSZ KASPERCZYK Tadeusz Kasperczyk i WADY POSTAWY CIAŁA diagnostyka i leczenie KRAKÓW 2004 t Spis treści Od A u to ra... 7 Rozdział I Wiadomości w stępne...9 Pojęcia: postawa prawidłowa, postawa wadliwa,
POŁĄCZENIA KRĘGOSŁUPA
 POŁĄCZENIA KRĘGOSŁUPA KRĘGOSŁUP (columna vertebralis) Kręgosłup nie jest sztywnym słupem kostnym składa się z kręgów zrośniętych ze sobą w odcinkach krzyżowym i guzicznym oraz ruchomych połączeo w części
POŁĄCZENIA KRĘGOSŁUPA KRĘGOSŁUP (columna vertebralis) Kręgosłup nie jest sztywnym słupem kostnym składa się z kręgów zrośniętych ze sobą w odcinkach krzyżowym i guzicznym oraz ruchomych połączeo w części
UKŁAD RUCHU (UKŁAD KOSTNY, UKŁAD MIĘŚNIOWY)
") Zadanie 1. (2 pkt). Na rysunku przedstawiono szkielet kończyny dolnej (wraz z częścią kości miednicznej) i kość krzyżową człowieka. a) Uzupełnij opis rysunku ( ) o nazwy wskazanych kości. b) Wybierz z
Zadanie 1. (2 pkt). Na rysunku przedstawiono szkielet kończyny dolnej (wraz z częścią kości miednicznej) i kość krzyżową człowieka. a) Uzupełnij opis rysunku ( ) o nazwy wskazanych kości. b) Wybierz z
POZYCJE WYJŚCIOWE I DWICZEBNE. dwiczenia kompensacyjno - korekcyjne
 POZYCJE WYJŚCIOWE I DWICZEBNE dwiczenia kompensacyjno - korekcyjne Zadania gimnastyki Gimnastyka wyrównawcza to zasób i rodzaj dwiczeo, które mają skompensowad pewien niedobór ruchowy zarówno pod względem
POZYCJE WYJŚCIOWE I DWICZEBNE dwiczenia kompensacyjno - korekcyjne Zadania gimnastyki Gimnastyka wyrównawcza to zasób i rodzaj dwiczeo, które mają skompensowad pewien niedobór ruchowy zarówno pod względem
Układ ruchu, skóra Zadanie 1. (1 pkt) Schemat przedstawia fragment szkieletu człowieka.
 Schemat przedstawia fragment szkieletu człowieka.") Układ ruchu, skóra Zadanie 1. (1 pkt) Schemat przedstawia fragment szkieletu człowieka. Podaj nazwy odcinków kręgosłupa oznaczonych na schemacie literami A, B, C i D. Zadanie 2. (1 pkt) Na rysunku przedstawiono
Układ ruchu, skóra Zadanie 1. (1 pkt) Schemat przedstawia fragment szkieletu człowieka. Podaj nazwy odcinków kręgosłupa oznaczonych na schemacie literami A, B, C i D. Zadanie 2. (1 pkt) Na rysunku przedstawiono
Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku Elektroradiologia w roku akademickim 2016/2017.
 Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku Elektroradiologia w roku akademickim 2016/2017. w1. Platforma elearningowa stosowana na kursie. w2. Metodyka eksperymentu fizycznego - rachunek błędów.
Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku Elektroradiologia w roku akademickim 2016/2017. w1. Platforma elearningowa stosowana na kursie. w2. Metodyka eksperymentu fizycznego - rachunek błędów.
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika i ergonomia pracy Kod przedmiotu/ modułu* Wydział (nazwa
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika i ergonomia pracy Kod przedmiotu/ modułu* Wydział (nazwa
I nforma c j e ogólne. Podstawy ergonomii. Nie dotyczy. Pierwszy. Seminaria 40 godz. Dr hab. n. zdr. Anna Lubkowska
 S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Podstawy ergonomii Przedmiot
S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Podstawy ergonomii Przedmiot
Biomechanika człowieka i kinematyka stawu kolanowego
 Biomechanika człowieka i kinematyka stawu kolanowego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 1. Terminologia 2. Wstęp do
Biomechanika człowieka i kinematyka stawu kolanowego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 1. Terminologia 2. Wstęp do
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty) Biomechanika kliniczna i ergonomia pracy
 Biomechanika kliniczna i ergonomia pracy") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2015-2018 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna i ergonomia pracy Kod przedmiotu/ modułu* Wydział
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2015-2018 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna i ergonomia pracy Kod przedmiotu/ modułu* Wydział
4.1. Modelowanie matematyczne
 4.1. Modelowanie matematyczne Model matematyczny Model matematyczny opisuje daną konstrukcję budowlaną za pomocą zmiennych. Wartości zmiennych będą należały to zbioru liczb rzeczywistych i będą one reprezentować
4.1. Modelowanie matematyczne Model matematyczny Model matematyczny opisuje daną konstrukcję budowlaną za pomocą zmiennych. Wartości zmiennych będą należały to zbioru liczb rzeczywistych i będą one reprezentować
ŚCIANY KLATKI PIERSIOWEJ 2.3.1.2 ŻEBRA
 133 2.3.1.2 ŻEBRA U człowieka występuje 12 par żeber. Są to długie, płaskie i wygięte listwy kostne, zwane też kośćmi żebrowymi. Z przodu ich przedłużeniami są chrząstki żebrowe. Tylny koniec żebra (costa)
133 2.3.1.2 ŻEBRA U człowieka występuje 12 par żeber. Są to długie, płaskie i wygięte listwy kostne, zwane też kośćmi żebrowymi. Z przodu ich przedłużeniami są chrząstki żebrowe. Tylny koniec żebra (costa)
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
OPIS PRZEDMIOTU. Anatomia funkcjonalna i rtg
 Załącznik Nr 1.11 pieczątka jednostki organizacyjnej OPIS PRZEDMIOTU, PROGRAMU NAUCZANIA ORAZ SPOSOBÓW WERYFIKACJI EFEKTÓW KSZTAŁCENIA CZEŚĆ A * (opis przedmiotu i programu nauczania) OPIS PRZEDMIOTU Nazwa
Załącznik Nr 1.11 pieczątka jednostki organizacyjnej OPIS PRZEDMIOTU, PROGRAMU NAUCZANIA ORAZ SPOSOBÓW WERYFIKACJI EFEKTÓW KSZTAŁCENIA CZEŚĆ A * (opis przedmiotu i programu nauczania) OPIS PRZEDMIOTU Nazwa
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna Kod przedmiotu/ modułu* Wydział (nazwa jednostki
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna Kod przedmiotu/ modułu* Wydział (nazwa jednostki
Połączenia kości tułowia
 Połączenia kości tułowia Połączenia kręgosłupa z czaszką Staw szczytowo-potyliczny prawy lewy Staw szczytowo-obrotowy staw szczytowo-obrotowy pośrodkowy przedni tylny staw szczytowo-obrotowy boczny prawy
Połączenia kości tułowia Połączenia kręgosłupa z czaszką Staw szczytowo-potyliczny prawy lewy Staw szczytowo-obrotowy staw szczytowo-obrotowy pośrodkowy przedni tylny staw szczytowo-obrotowy boczny prawy
Element cięgnowy. Rysunek: Element LINK1. Jakub J. Słowiński (IMMT PWr) Wykład 4 09 i 16.03.2012 51 / 74
 Wykład 4 09 i 16.03.2012 51 / 74") Elementy 1D Element cięgnowy Element LINK1 jest elementem 2D, dwuwęzłowym, posiadającym jedynie dwa stopnie swobody - translację w kierunku x oraz y. Można zadeklarować pole jego przekroju oraz odkształcenie
Elementy 1D Element cięgnowy Element LINK1 jest elementem 2D, dwuwęzłowym, posiadającym jedynie dwa stopnie swobody - translację w kierunku x oraz y. Można zadeklarować pole jego przekroju oraz odkształcenie
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
Mechanika Techniczna I Engineering Mechanics I. Transport I stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
SPIS TREŚCI 2. LICZEBNIKI 16
 1. PODSTAWOWE ZWROTY 11 1.1. Formularze - słowniczek 11 1.2. Powitanie 11 1.3. Pożegnanie 12 1.4. Najpotrzebniejsze zwroty 12 1.5. Podstawowe pytania 13 1.6. Próby porozumiewania się 13 1.7. Zwroty grzecznościowe
1. PODSTAWOWE ZWROTY 11 1.1. Formularze - słowniczek 11 1.2. Powitanie 11 1.3. Pożegnanie 12 1.4. Najpotrzebniejsze zwroty 12 1.5. Podstawowe pytania 13 1.6. Próby porozumiewania się 13 1.7. Zwroty grzecznościowe
Obiektywne metody diagnostyki narządu ruchu w fizjoterapii
 Obiektywne metody diagnostyki narządu ruchu w fizjoterapii 1 semestr 14 godzin wykładów i 28 godzin ćwiczeń Studia drugiego stopnia (magisterskie) stacjonarne Fizjoterapia I rok /2 semestr Cele nauczania
Obiektywne metody diagnostyki narządu ruchu w fizjoterapii 1 semestr 14 godzin wykładów i 28 godzin ćwiczeń Studia drugiego stopnia (magisterskie) stacjonarne Fizjoterapia I rok /2 semestr Cele nauczania
WYMAGANIA EDUKACYJNE Z WYCOWANIA FIZYCZNEGO
 WYMAGANIA EDUKACYJNE Z WYCOWANIA FIZYCZNEGO 6.3. Wymagania szczegółowe w klasie IV szkoły podstawowej W klasie IV szkoły podstawowej kontrolujemy i oceniamy następujące obszary aktywności ucznia: 1) postawę
WYMAGANIA EDUKACYJNE Z WYCOWANIA FIZYCZNEGO 6.3. Wymagania szczegółowe w klasie IV szkoły podstawowej W klasie IV szkoły podstawowej kontrolujemy i oceniamy następujące obszary aktywności ucznia: 1) postawę
Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie
 Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie materiały pomocnicze do zajęć audytoryjnych i projektowych opracowanie: dr inż. Piotr Dębski, dr inż. Dariusz Zaręba
Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie materiały pomocnicze do zajęć audytoryjnych i projektowych opracowanie: dr inż. Piotr Dębski, dr inż. Dariusz Zaręba
PRZEWODNIK PO PRZEDMIOCIE. Instytut Nauk o Zdrowiu i Żywieniu Osoba sporządzająca
 Politechnika Częstochowska, Wydział Zarządzania PRZEWODNIK PO PRZEDMIOCIE Nazwa przedmiotu Nauka o człowieku Kierunek Menedżer żywności i żywienia Forma studiów stacjonarne Poziom kwalifikacji I stopnia
Politechnika Częstochowska, Wydział Zarządzania PRZEWODNIK PO PRZEDMIOCIE Nazwa przedmiotu Nauka o człowieku Kierunek Menedżer żywności i żywienia Forma studiów stacjonarne Poziom kwalifikacji I stopnia
Przedmiotowe zasady oceniania z wychowania fizycznego w klasach IV-VIII szkoły podstawowej.
 Przedmiotowe zasady oceniania z wychowania fizycznego w klasach IV-VIII szkoły podstawowej. 1. Skala ocen W ocenianiu zarówno cząstkowym, jak i semestralnym oraz rocznym stosowane są następujące stopnie
Przedmiotowe zasady oceniania z wychowania fizycznego w klasach IV-VIII szkoły podstawowej. 1. Skala ocen W ocenianiu zarówno cząstkowym, jak i semestralnym oraz rocznym stosowane są następujące stopnie
Grzegorz Lewandowski. Wydanie poprawione
 Grzegorz Lewandowski O Wydanie poprawione GRZEGORZ LEWANDOWSKI Masaż leczniczy Wydanie poprawione i uzupełnione Łódź 2012 4 Spis treści W prowadzenie... 3 Rozdział I. Okolice ciała ludzkiego... 11 Rozdział
Grzegorz Lewandowski O Wydanie poprawione GRZEGORZ LEWANDOWSKI Masaż leczniczy Wydanie poprawione i uzupełnione Łódź 2012 4 Spis treści W prowadzenie... 3 Rozdział I. Okolice ciała ludzkiego... 11 Rozdział
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2017-2022 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika stosowana i biomechanika kliniczna Kod przedmiotu/ modułu*
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2017-2022 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika stosowana i biomechanika kliniczna Kod przedmiotu/ modułu*
S YL AB US MODUŁ U ( PRZEDMIOTU) I nforma cje ogólne. Biomechanika z elementami ergonomii. Pierwszy
 I nforma cje ogólne. Biomechanika z elementami ergonomii. Pierwszy") YL AB U MODUŁ U ( PRZDMIOTU) I nforma cje ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów pecjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika z elementami ergonomii
YL AB U MODUŁ U ( PRZDMIOTU) I nforma cje ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów pecjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika z elementami ergonomii
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Biomechanika Dodawanie wektorów 1.Prostolinijny ruch post powy 2.Ruch wokół osi 3.Ruch zło ony
 Biomechanika- dotyczy układu ruchu żywego układu. Dzielimy ją na działy : -statyka -kinematyka -dynamika Statyka przedmiotem badań będzie oddziaływanie sił na ciało znajdujące się w spoczynku Kinematyka
Biomechanika- dotyczy układu ruchu żywego układu. Dzielimy ją na działy : -statyka -kinematyka -dynamika Statyka przedmiotem badań będzie oddziaływanie sił na ciało znajdujące się w spoczynku Kinematyka
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, Spis treści
 Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku elektroradiologia w roku akademickim 2017/2018.
 Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku elektroradiologia w roku akademickim 2017/2018. w1. Platforma elearningowa stosowana na kursie. w2. Metodyka eksperymentu fizycznego - rachunek błędów.
Zestaw ćwiczeń laboratoryjnych z Biofizyki dla kierunku elektroradiologia w roku akademickim 2017/2018. w1. Platforma elearningowa stosowana na kursie. w2. Metodyka eksperymentu fizycznego - rachunek błędów.
TOPOGRAFIA JAMY BRZUSZNEJ FIZJOTERAPIA PO OPERACJACH JAMY BRZUSZNEJ DOSTĘPY DO OPERACJI JAMY BRZUSZNEJ
 TOPOGRAFIA JAMY BRZUSZNEJ FIZJOTERAPIA PO OPERACJACH JAMY BRZUSZNEJ DOSTĘPY DO OPERACJI JAMY BRZUSZNEJ WPŁYW OPERACJI W OBRĘBIE JAMY BRZUSZNEJ NA CZYNNOŚĆ UKŁADU ODDECHOWEGO Okolica operacji Natężona pojemność
TOPOGRAFIA JAMY BRZUSZNEJ FIZJOTERAPIA PO OPERACJACH JAMY BRZUSZNEJ DOSTĘPY DO OPERACJI JAMY BRZUSZNEJ WPŁYW OPERACJI W OBRĘBIE JAMY BRZUSZNEJ NA CZYNNOŚĆ UKŁADU ODDECHOWEGO Okolica operacji Natężona pojemność
Trójwymiarowa grafika komputerowa rzutowanie
 Trójwymiarowa grafika komputerowa rzutowanie Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Rzutowanie w przestrzeni 3D etapy procesu rzutowania określenie rodzaju rzutu określenie
Trójwymiarowa grafika komputerowa rzutowanie Mirosław Głowacki Wydział Inżynierii Metali i Informatyki Przemysłowej Rzutowanie w przestrzeni 3D etapy procesu rzutowania określenie rodzaju rzutu określenie
Mechanika i Budowa Maszyn I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Karta w przygotowaniu KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Mechanika ogólna II Nazwa modułu w języku angielskim Engineering Mechanics Obowiązuje od roku akademickiego 2013/2014 A. USYTUOWANIE
Karta w przygotowaniu KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Mechanika ogólna II Nazwa modułu w języku angielskim Engineering Mechanics Obowiązuje od roku akademickiego 2013/2014 A. USYTUOWANIE