Wprowadzenie do sterowania adaptacyjnego
|
|
|
- Aneta Kania
- 7 lat temu
- Przeglądów:
Transkrypt
1 Wykład w ramach przedmiotu Komputerowe Systemy Sterowania dla sem. VI AiR AiSS WEiA PG Wprowadzenie do sterowania adaptacyjnego Opracował dr inż. Jarosław Tarnawski 1
2 Plan wykładu Definicja sterowania adaptacyjnego Historia rozwoju Rodzaje sterowania adaptacyjnego Estymacja parametryczna Niekrzepka Krzepka Przykłady Zastosowania 2
3 Definicje Wg słownika języka polskiego PWN adaptacja to: 1. «przystosowanie czegoś do innego użytku niż było przeznaczone» 2. «przystosowanie utworu literackiego do wystawienia na scenie lub do sfilmowania; też: utwór literacki w ten sposób przystosowany» 3. «przystosowanie organizmów do warunków środowiska» 4. «zmniejszenie odczuwania określonych bodźców» 3
4 Definicje cd. Astrom: Adaptive Controller is a controller with adjustable parameters and a mechanism for adjusting the parameters. Regulator adaptacyjny jest regulatorem z nastawialnymi parametrami i mechanizmem do nastawy parametrów. 4
5 Nieliniowośd z definicji! Regulatory adaptacyjne są nieliniowe ze względu na mechanizm adaptacji parametrów! 5
6 Definicje Układ sterowania adaptacyjnego to taki, którym zachodzi automatyczne dopasowanie parametrów regulatora do zmieniających się właściwości obiektu sterowania i jego otoczenia. Zbiór technik umożliwiających strojenie regulatora w czasie rzeczywistym podczas działania regulatora 6
7 Cechy regulatorów adaptacyjnych Dostosowanie się do nieznanych warunków pracy Występowanie dodatkowego sprzężenia zwrotnego (od jakości działania) Zmiennośd w czasie współczynników sprzężeo zwrotnych Dokonywanie identyfikacji obiektu w trakcie działania układu Zmniejszanie niepewności co do sterowanego obiektu w trakcie działania adaptacji 7
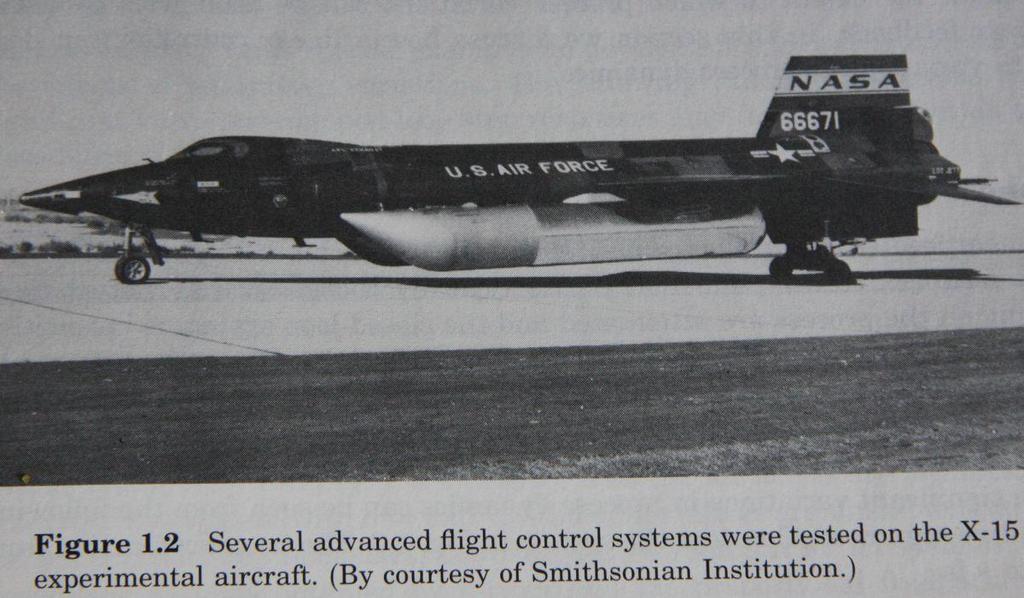
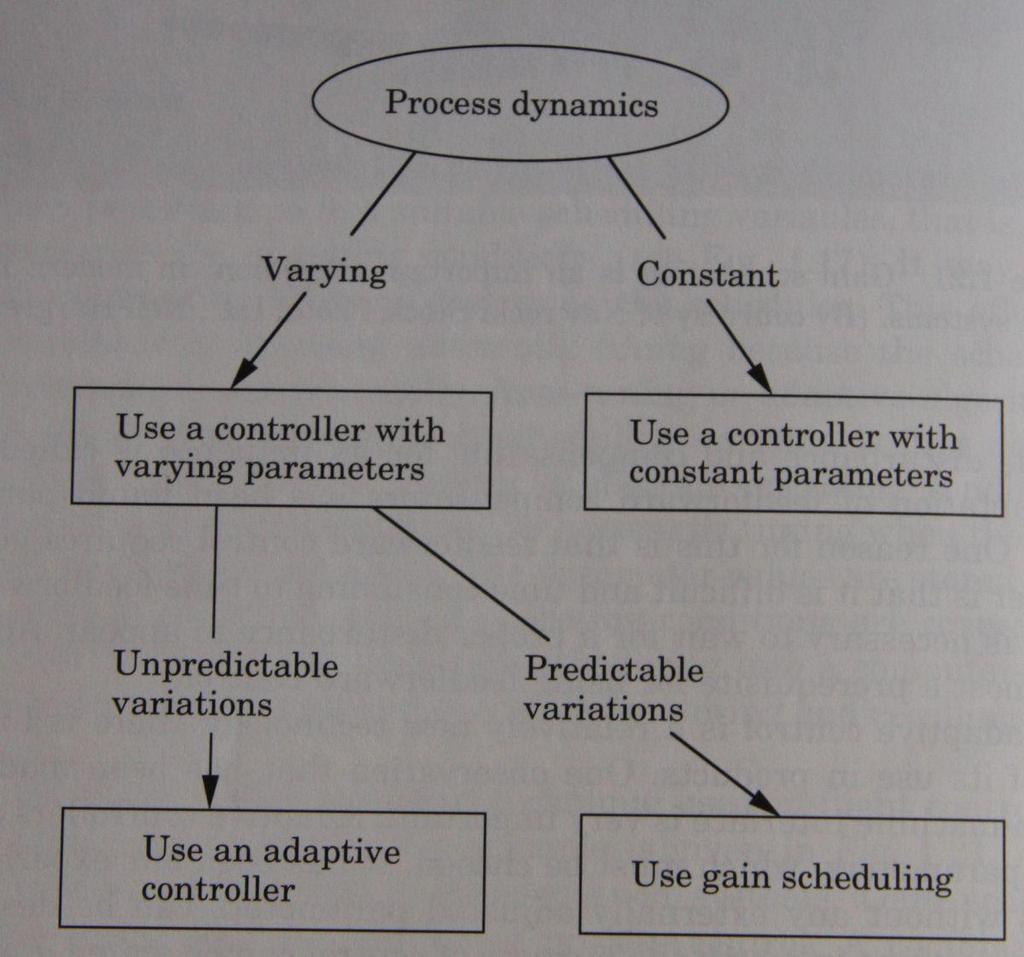
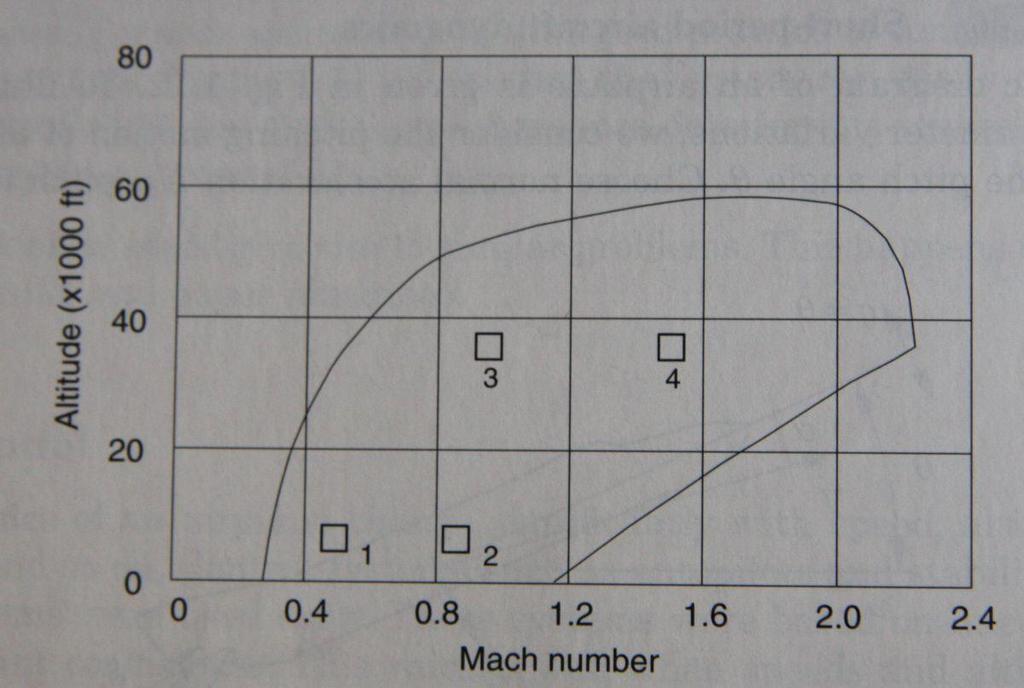
8 Krótka historia rozwoju sterowania adaptacyjnego We wczesnych latach 50tych XXw. prowadzono intensywne badania dotyczące sterowania adaptacyjnego w zastosowaniu do autopilotów samolotów badawczych. Tego typu samoloty latały w szerokim zakresie prędkości i wysokości. Odkryto, że standardowe metody sterowania z stałym wzmocnieniem i liniowym sprzężeniem zwrotnym pracują poprawnie w konkretnych warunkach, ale nie dla całego zakresu warunków w których może znajdowad się samolot. Pojawiła się realna potrzeba opracowania bardziej złożonego układu sterowania umożliwiającego pracę w całym zakresie pracy samolotu. Po intensywnych badaniach odkryto, że odpowiednią techniką dla opisanych potrzeb może byd sterowanie ze zmiennym, przełączanym wzmocnieniem (ang. gain scheduling). Następnie zainteresowanie sterowaniem adaptacyjnym zmalało ponieważ ówczesne możliwości analizy nie 8 były wystarczające.
9 Krótka historia rozwoju sterowania adaptacyjnego W latach 60tych prowadzono prace nad teorią sterowania, które znalazły zastosowanie w sterowaniu adaptacyjnym. Opracowano metody przestrzeni stanów oraz teorię stabilności, a także ważne osiągnięcia w teorii sterowania stochastycznego. Wprowadzenie przez Bellmana programowania dynamicznego ułatwiło zrozumienie procesów adaptacyjnych. Istotny wkład ma także Cypkin, który pokazał, że wiele podejśd do systemów uczących się i adaptacyjnych można opisad wspólną metodologią. W tamtym czasie nastąpił istotny rozwój w zagadnieniach identyfikacji systemów. Renesans sterowania adaptacyjnego nastąpił w latach 70 kiedy różne mechanizmy estymacji były stosowane z różnymi metodami sterowania adaptacyjnego. Pojawiało się wiele zastosowao, ale opracowania teoretyczne były nadal niewielkie. 9
10 Krótka historia rozwoju sterowania adaptacyjnego W koocowych latach 70tych i początku 80tych pojawiły się dowody stabilności systemów sterowania adaptacyjnego, na początku przy bardzo restrykcyjnych założeniach. Podejmowano wysiłek, aby połączyd krzepkie sterowanie i identyfikację systemów. Odnowiono badania niezbędności założeo i osiągnięto ciekawe wyniki w temacie krzepkości sterowania adaptacyjnego jak i uniwersalnych regulatorów. Badania w koocu lat 80 i na początku 90tych dały nowe spojrzenie na krzepkośd w regulatorach adaptacyjnych. Rozwój sterowania układami nieliniowymi umożliwił lepsze zrozumienie sterowania adaptacyjnego. Ustalono także, że sterowanie adaptacyjne ma silny związek z koncepcją uczenia rozwijaną w dziedzinie computer science wykorzystania komputerów. 10
11 Krótka historia rozwoju sterowania adaptacyjnego Prowadzono dużo eksperymentów ze sterowaniem adaptacyjnym w laboratoriach i przemyśle. Silną stymulacją był rozwój techniki mikrokomputerowej. Interakcja pomiędzy rozwojem teorii oraz implementacją w praktyce umożliwiła dalszy rozwój w wyniku którego we wczesnych latach 80tych pojawiają się pierwsze regulatory komercyjne. Ten rozwój obecnie przyspieszył. Jednym z efektów jest to, że dostępne dziś regulatory komercyjne z pętlą sprzężenia posiadają jakąś technikę adaptacji czy strojenia. Podstawowym powodem wprowadzania i rozwijania sterowania adaptacyjnego było otrzymanie regulatorów, które mogą dostosowywad się do zmian w dynamice procesu i w charakterystykach zakłóceo. Niejako przy okazji odkryto, że metody adaptacyjne mogą byd użyte do automatycznego strojenia regulatorów. 11
12 12
13 13
14 14
15 Programowe zmiany parametrów regulatora (ang. Gain scheduling) Metoda quasi-adaptacyjna 15
16 16

17 17
18 Regulacja bezpośrednia 18
19 Regulacja pośrednia 19
20 Regulacja adaptacyjna pośrednia z syntezą regulatora 20
21 Model parametryczny 21
22 Parametryzacja 22
23 Estymacja parametryczna (na potrzeby sterowania adaptacyjnego) Estymacja parametrów modeli to nieodzowny element funkcjonalny sterowania adaptacyjnego. Metoda programowych zmian wzmocnienia (ang. gainscheduling) zaliczana do szeroko pojmowanego sterowania adaptacyjnego, uważana jest jednak za metodę quasi-adaptacyjną właśnie z powodu braku estymacji parametrów. Gdy mówi się o pełnym sterowaniu adaptacyjnym, jest oczywiste, że jednym z elementów tego sterowania jest mechanizm estymacji parametrów modelu. Poprawnośd i jakośd działania mechanizmu estymacji ma zasadniczy wpływ na jakośd działania regulatora adaptacyjnego. 23
24 Estymacja parametryczna (na potrzeby sterowania adaptacyjnego) Procedury estymacji parametrów są fragmentem większego procesu identyfikacji obiektu, w którego skład wchodzi właściwy wybór modelu matematycznego obiektu, wybór odpowiedniej metody estymacji parametrów, zapewnienie odpowiednich warunków pracy mechanizmu estymacji. W tym rozdziale przyjęto założenie, że model matematyczny posiada już określoną strukturę, a rozpatruje się zagadnienie właściwego doboru mechanizmu estymacji parametrów. Ocena właściwego wyboru jest oczywiście wielokryterialna: zbieżnośd do prawdziwych wartości parametrów, krzepkośd algorytmu, łatwośd implementacji, możliwośd pracy ze zmiennymi w czasie parametrami, chwilowe i uśrednione błędy estymacji itd. 24
25 Niekrzepkie metody estymacji (na potrzeby sterowania adaptacyjnego) Standardowe (niekrzepkie) metody estymacji parametrów przeznaczone są dla modeli, których struktura odpowiada strukturze obiektu. W przypadku parametrów mających swoje odpowiedniki fizyczne można powiedzied, że istnieją prawdziwe parametry modelu i estymacja parametrów modelu oznacza po prostu estymacje parametrów fizycznych. Dla modeli typu czarna skrzynka (ang. black box), relacje pomiędzy wejściem a wyjściem obiektu modeluje się jedynie na podstawie obserwacji sygnałów na wejściu i wyjściu. Jeśli dla założonej struktury tej relacji, a więc znanej struktury parametryzacji modelu, istnieją takie wartości parametrów, dla których model wiernie odtwarza wyjścia obiektu, to również można mówid o prawdziwych parametrach takiego modelu, czy też alternatywnie o prawdziwej parametryzacji modelu. Zgodnie z dowodami zbieżności standardowych algorytmów estymacji, w przypadku posiadania modelu z prawdziwą parametryzacją, można oczekiwad, że w odpowiednich warunkach prowadzenia procesu estymacji (odpowiedni sygnał pobudzający) estymaty parametrów modelu będą zbiegały do prawdziwych wartości parametrów. 25
26 Błąd estymacji 26
27 Algorytm gradientowy (ang.gradient Method - GM) 27
28 Algorytm najmniejszych kwadratów (ang. Recursvie Least Squares RLS) 28
29 Własności RLS 29
30 Krzepkie metody estymacji (na potrzeby sterowania adaptacyjnego) W większości modeli obiektów fizycznych stosowane są jednak rozmaite uproszczenia. Najczęstsze z nich to upraszczanie rzędu dynamiki obiektu, eliminacja nieliniowości, pomijanie szumu pomiarowego, założenia o stacjonarności parametrów. W rozdziale 3 zostały przedstawione poczynione uproszczenia modelu, w związku z tym na etapie wyboru procedury estymacji parametrów należy uwzględnid następujące konsekwencje poczynionych uproszczeo: błędu struktury modelu, ograniczonego zakłócenia (sygnału zakłócającego o ograniczonej wartości), istnienia niemodelowanej dynamiki. Należy również oczekiwad wolnej zmienności parametrów w czasie na przedziałach czasu, na których zachowanie obiektu opisywane jest modelami lokalnymi. Zastosowanie klasycznych (niekrzepkich) metod estymacji do modeli uproszczonych może powodowad konsekwencje objawiające się brakiem powodzenia estymacji w różnej postaci, np. dryftu parametrów, nieciągłości estymat, dużych błędów estymacji. Szczególnie dotkliwym, z punktu widzenia sterowania, negatywnym zjawiskiem jest efekt dryftu parametrów zostanie on szczegółowo zaprezentowany. Aby zapobiec opisanym niepożądanym konsekwencjom i uwzględnid pewne niedoskonałości modelu, stosuje się tzw. krzepkościowe modyfikacje algorytmów estymacji. Istnieje kilka metod modyfikacji krzepkościowych algorytmów estymacji: modyfikacja sigma, modyfikacja sigma z przełączaniem, rzutowanie parametrów, modyfikacja epsilon, natomiast na potrzeby tej pracy szczegółowo przedstawiono modyfikację martwa strefa w wersji zarówno nieciągłej jaki i ciągłej. 30
31 Dryf parametrów Zjawisko dryftu parametrów może wystąpid, gdy zastosowana zostaje klasyczna metoda estymacji parametrów (np. gradientowa lub najmniejszych kwadratów) dla obiektu posiadającego błędy modelowania nie będące białym szumem. Efektem dryftu parametrów jest to, że estymaty parametrów modeli zmierzają do nieskooczoności przy utrzymywaniu niewielkiego błędu modelowania. Otrzymanie nieograniczonych estymat parametrów uniemożliwia otrzymanie poprawnego sterowania. 31
32 32
33 33
34 34
35 Modyfikacja krzepkościowa wyciek (ang. leakage) 35
.")
36 Modyfikacja krzepkościowa - projekcja Efektywną metodą wyeliminowania dryftu parametrów i utrzymania estymat parametrów w pewnych a priori zdefiniowanych granicach jest użycie metody gradientu z projekcją (rzutowaniem). 36
37 Modyfikacja krzepkościowa martwa strefa Ideą modyfikacji krzepkościowej martwa strefa jest to, aby nie uruchamiad procedury estymacji w sytuacji, gdy błąd estymacji jest mniejszy niż założony czy znany a priori błąd modelowania. Estymacja parametrów modeli wykonywana jest wyłącznie wtedy, gdy błąd estymacji przekroczy wartośd błędu modelowania. 37
38 Stabilnośd Lapunowa wykorzystywana w sterowaniu adaptacyjnym Metoda ta wymaga skonstruowania funkcji V(x,t) takiej, że: posiada ona ciągłe pochodne cząstkowe po x i t, oraz 38
39 Przykład sterowania bezpośredniego (direct adaptive control) 39
40 Przykład sterowania bezpośredniego (direct adaptive control) Dla znanego a p 40
41 Dla nieznanego a p 41
42 Przykład sterowania pośredniego (ang. indirect adaptive control) 42
43 Przykład sterowania pośredniego (ang. indirect adaptive control) 43

44 Sterowanie adaptacyjne z nadzorcą i wiedzą operatora 44

45 Regulatory komercyjne 45

46 Regulatory komercyjne 46

47 Blok programowy regulatora 47
48 Bibliografia [1] Astrom K., Wittenmark B. (1995) Adaptive Control Second Edition, Addison-Wesley Publishing Company [2] Bubnicki Z. (2002) Teoria i algorytmy sterowania, Wydawnictwo Naukowe PWN [3] Gang T. (2003) Adaptive Control Design and Analysis Wiley-Interscience, A John Wiley & Sons Inc. Publication [4] Goodwin G., Sang Sing K. (1984) Adaptive Filtering Prediction and Control, Prentice-Hall Inc.Englewood Cliffs, New Jersey 48
49 Bibliografia cd. [5] Królikowski A. (2004) Sterowanie adaptacyjne z ograniczeniami sygnału sterującego, Wydawnictwo Politechniki Poznaoskiej [6] Niederlioski A., Mościoski J, Ogonowski Z. (1995) Regulacja adaptacyjna, Wydawnictwo Naukowe PWN [7] Soderstrom T., Stoica P. (1997) Identyfikacja systemów, Wydawnictwo Naukowe PWN 49
Estymacja parametrów Wybrane zagadnienia implementacji i wykorzystania
 Estymacja parametrów Wybrane zagadnienia implementacji i wykorzystania Wykład w ramach przedmiotu Komputerowe systemy sterowania i wspomagania decyzji Plan wykładu Potrzeba estymacji parametrów Estymacja
Estymacja parametrów Wybrane zagadnienia implementacji i wykorzystania Wykład w ramach przedmiotu Komputerowe systemy sterowania i wspomagania decyzji Plan wykładu Potrzeba estymacji parametrów Estymacja
Automatyka i Robotyka II stopień ogólno akademicki studia niestacjonarne. wszystkie Katedra Automatyki i Robotyki Dr inż.
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Identyfikacja obiektów sterowania Identification of Control Systems A.
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Identyfikacja obiektów sterowania Identification of Control Systems A.
Dynamika procesu zmienna stała. programowalne zmiany parametrów r.
 Sterowanie adaptacyjne Sterowanie adaptacyjne polega na dostosowywaniu (adaptacji) nastaw regulatora do zmian parametrów obiektu (w trakcie pracy) Techniki adaptacji Dynamika procesu zmienna stała regulator
Sterowanie adaptacyjne Sterowanie adaptacyjne polega na dostosowywaniu (adaptacji) nastaw regulatora do zmian parametrów obiektu (w trakcie pracy) Techniki adaptacji Dynamika procesu zmienna stała regulator
Sterowanie napędów maszyn i robotów
 Wykład 5 - Identyfikacja Instytut Automatyki i Robotyki (IAiR), Politechnika Warszawska Warszawa, 2015 Koncepcje estymacji modelu Standardowe drogi poszukiwania modeli parametrycznych M1: Analityczne określenie
Wykład 5 - Identyfikacja Instytut Automatyki i Robotyki (IAiR), Politechnika Warszawska Warszawa, 2015 Koncepcje estymacji modelu Standardowe drogi poszukiwania modeli parametrycznych M1: Analityczne określenie
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Podstawy Sztucznej Inteligencji (PSZT)
") Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Egzamin / zaliczenie na ocenę*
 Zał. nr do ZW /01 WYDZIAŁ / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Identyfikacja systemów Nazwa w języku angielskim System identification Kierunek studiów (jeśli dotyczy): Inżynieria Systemów
Zał. nr do ZW /01 WYDZIAŁ / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Identyfikacja systemów Nazwa w języku angielskim System identification Kierunek studiów (jeśli dotyczy): Inżynieria Systemów
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Modelowanie jako sposób opisu rzeczywistości. Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka
 Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH
 AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
AiR_TR2_5/9 Teoria Regulacji II Control Theory II. Automatyka i Robotyka I stopień ogólno akademicki studia niestacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
AiR_TR2_5/9 Teoria Regulacji II Control Theory II. Automatyka i Robotyka I stopień ogólno akademicki studia stacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
KARTA OPISU MODUŁU KSZTAŁCENIA
 Nazwa modułu: Kierunek studiów KARTA OPISU MODUŁU KSZTAŁCENIA Identyfikacja i systemy adaptacyjne Profil kształcenia (ogólnoakademicki, praktyczny) Kod Rok / Semestr Automatyka i Robotyka ogólnoakademicki
Nazwa modułu: Kierunek studiów KARTA OPISU MODUŁU KSZTAŁCENIA Identyfikacja i systemy adaptacyjne Profil kształcenia (ogólnoakademicki, praktyczny) Kod Rok / Semestr Automatyka i Robotyka ogólnoakademicki
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Spis treści. Przedmowa... XI. Rozdział 1. Pomiar: jednostki miar... 1. Rozdział 2. Pomiar: liczby i obliczenia liczbowe... 16
 Spis treści Przedmowa.......................... XI Rozdział 1. Pomiar: jednostki miar................. 1 1.1. Wielkości fizyczne i pozafizyczne.................. 1 1.2. Spójne układy miar. Układ SI i jego
Spis treści Przedmowa.......................... XI Rozdział 1. Pomiar: jednostki miar................. 1 1.1. Wielkości fizyczne i pozafizyczne.................. 1 1.2. Spójne układy miar. Układ SI i jego
Praca dyplomowa magisterska
 Praca dyplomowa magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA Dyplomant: Jakub Kołakowski Opiekun pracy: dr inż. Michał Meller Plan prezentacji
Praca dyplomowa magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA Dyplomant: Jakub Kołakowski Opiekun pracy: dr inż. Michał Meller Plan prezentacji
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Ekonometria i prognozowanie Econometrics and prediction
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Ekonometria i prognozowanie Econometrics and prediction A. USYTUOWANIE
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Ekonometria i prognozowanie Econometrics and prediction A. USYTUOWANIE
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Metody Prognozowania
 Wprowadzenie Ewa Bielińska 3 października 2007 Plan 1 Wprowadzenie Czym jest prognozowanie Historia 2 Ciągi czasowe Postępowanie prognostyczne i prognozowanie Predykcja długo- i krótko-terminowa Rodzaje
Wprowadzenie Ewa Bielińska 3 października 2007 Plan 1 Wprowadzenie Czym jest prognozowanie Historia 2 Ciągi czasowe Postępowanie prognostyczne i prognozowanie Predykcja długo- i krótko-terminowa Rodzaje
Najprostszy schemat blokowy
 Definicje Modelowanie i symulacja Modelowanie zastosowanie określonej metodologii do stworzenia i weryfikacji modelu dla danego układu rzeczywistego Symulacja zastosowanie symulatora, w którym zaimplementowano
Definicje Modelowanie i symulacja Modelowanie zastosowanie określonej metodologii do stworzenia i weryfikacji modelu dla danego układu rzeczywistego Symulacja zastosowanie symulatora, w którym zaimplementowano
Tematy magisterskie: Lp. Sugerowany stopień, kierunek studiów oraz specjalność Elektrotechnika Magisterska Dr hab. inż.
 Katedra Automatyki i Elektroniki Wydział Elektryczny Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych dla studentów Elektrotechnika oraz Telekomunikacja kończących
Katedra Automatyki i Elektroniki Wydział Elektryczny Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych dla studentów Elektrotechnika oraz Telekomunikacja kończących
Praktyka inżynierska korzystamy z tego co mamy. regulator. zespół wykonawczy. obiekt (model) Konfiguracja regulatora
 Konfiguracja regulatora") raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
Elektrotechnika II stopień ogólnoakademicki. stacjonarne. przedmiot specjalnościowy. obowiązkowy polski semestr II semestr letni. tak. Laborat. 30 g.
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Metody estymacji parametrów i sygnałów Estimation methods of parameters
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Metody estymacji parametrów i sygnałów Estimation methods of parameters
Metody komputerowe statystyki Computer Methods in Statistics. Matematyka. Poziom kwalifikacji: II stopnia. Liczba godzin/tydzień: 2W, 3L
 Nazwa przedmiotu: Kierunek: Metody komputerowe statystyki Computer Methods in Statistics Matematyka Rodzaj przedmiotu: przedmiot obowiązkowy dla specjalności matematyka przemysłowa Rodzaj zajęć: wykład,
Nazwa przedmiotu: Kierunek: Metody komputerowe statystyki Computer Methods in Statistics Matematyka Rodzaj przedmiotu: przedmiot obowiązkowy dla specjalności matematyka przemysłowa Rodzaj zajęć: wykład,
Definicje. Najprostszy schemat blokowy. Schemat dokładniejszy
 Definicje owanie i symulacja owanie zastosowanie określonej metodologii do stworzenia i weryfikacji modelu dla danego rzeczywistego Symulacja zastosowanie symulatora, w którym zaimplementowano model, do
Definicje owanie i symulacja owanie zastosowanie określonej metodologii do stworzenia i weryfikacji modelu dla danego rzeczywistego Symulacja zastosowanie symulatora, w którym zaimplementowano model, do
Sterowanie Napędów Maszyn i Robotów
 Wykład 3 - Metodyka projektowania sterowania. Opis bilansowy Instytut Automatyki i Robotyki Warszawa, 2015 Metodyka projektowania sterowania Zrozumienie obiektu, możliwości, ograniczeń zapoznanie się z
Wykład 3 - Metodyka projektowania sterowania. Opis bilansowy Instytut Automatyki i Robotyki Warszawa, 2015 Metodyka projektowania sterowania Zrozumienie obiektu, możliwości, ograniczeń zapoznanie się z
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Algorytmy ze skończoną pamięcią dla przetwarzania sygnałów w diagnostyce procesów.
 Mgr inż. Jędrzej Byrski 28.11.2014 Katedra Informatyki Stosowanej Wydział EAIiIB, AGH 1. Tezy i zakres rozprawy AUTOREFERAT PRACY DOKTORSKIEJ Algorytmy ze skończoną pamięcią dla przetwarzania sygnałów
Mgr inż. Jędrzej Byrski 28.11.2014 Katedra Informatyki Stosowanej Wydział EAIiIB, AGH 1. Tezy i zakres rozprawy AUTOREFERAT PRACY DOKTORSKIEJ Algorytmy ze skończoną pamięcią dla przetwarzania sygnałów
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Ogólny schemat blokowy układu ze sprzężeniem zwrotnym
 1. Definicja sprzężenia zwrotnego Sprzężenie zwrotne w układach elektronicznych polega na doprowadzeniu części sygnału wyjściowego z powrotem do wejścia. Częśd sygnału wyjściowego, zwana sygnałem zwrotnym,
1. Definicja sprzężenia zwrotnego Sprzężenie zwrotne w układach elektronicznych polega na doprowadzeniu części sygnału wyjściowego z powrotem do wejścia. Częśd sygnału wyjściowego, zwana sygnałem zwrotnym,
WYDZIAŁ ELEKTRYCZNY KATEDRA AUTOMATYKI I ELEKTRONIKI. Badanie układu regulacji dwustawnej
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
166 Wstęp do statystyki matematycznej
 166 Wstęp do statystyki matematycznej Etap trzeci realizacji procesu analizy danych statystycznych w zasadzie powinien rozwiązać nasz zasadniczy problem związany z identyfikacją cechy populacji generalnej
166 Wstęp do statystyki matematycznej Etap trzeci realizacji procesu analizy danych statystycznych w zasadzie powinien rozwiązać nasz zasadniczy problem związany z identyfikacją cechy populacji generalnej
Spis treści. Dzień 1. I Elementy układu automatycznej regulacji (wersja 1109) II Rodzaje regulatorów i struktur regulacji (wersja 1109)
 II Rodzaje regulatorów i struktur regulacji (wersja 1109)") Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Sterowanie napędów maszyn i robotów
 Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wstęp do sieci neuronowych, wykład 03 Warstwy RBF, jednostka Adaline.
 Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka Adaline. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 211-1-18 1 Pomysł Przykłady Zastosowanie 2
Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka Adaline. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 211-1-18 1 Pomysł Przykłady Zastosowanie 2
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Jacek Skorupski pok. 251 tel konsultacje: poniedziałek , sobota zjazdowa
 Jacek Skorupski pok. 251 tel. 234-7339 jsk@wt.pw.edu.pl http://skorupski.waw.pl/mmt prezentacje ogłoszenia konsultacje: poniedziałek 16 15-18, sobota zjazdowa 9 40-10 25 Udział w zajęciach Kontrola wyników
Jacek Skorupski pok. 251 tel. 234-7339 jsk@wt.pw.edu.pl http://skorupski.waw.pl/mmt prezentacje ogłoszenia konsultacje: poniedziałek 16 15-18, sobota zjazdowa 9 40-10 25 Udział w zajęciach Kontrola wyników
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: systemy sterowania Rodzaj zajęć: wykład, laboratorium UKŁADY AUTOMATYKI PRZEMYSŁOWEJ Industrial Automatics Systems
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: systemy sterowania Rodzaj zajęć: wykład, laboratorium UKŁADY AUTOMATYKI PRZEMYSŁOWEJ Industrial Automatics Systems
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład organizacyjny
 Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Wykład organizacyjny dr inż. Michał Grochowski kiss.pg.mg@gmail.com michal.grochowski@pg.gda.pl
Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Wykład organizacyjny dr inż. Michał Grochowski kiss.pg.mg@gmail.com michal.grochowski@pg.gda.pl
Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I
 Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje:
Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje:
Miernictwo dynamiczne Dynamic Measurement. Elektrotechnika I stopnia (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Miernictwo dynamiczne Dynamic Measurement
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Miernictwo dynamiczne Dynamic Measurement
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Automatyka i Robotyka II Stopień ogólno akademicki studia niestacjonarne wszystkie Katedra Automatyki i Robotyki Prof. dr hab. inż.
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Aproksymacja funkcji a regresja symboliczna
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Automatyka i robotyka
 Automatyka i robotyka Wykład 1 - Wprowadzenie do automatyki Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu Podstawowe informacje Wprowadzenie
Automatyka i robotyka Wykład 1 - Wprowadzenie do automatyki Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu Podstawowe informacje Wprowadzenie
Opinia o pracy doktorskiej pt. On active disturbance rejection in robotic motion control autorstwa mgr inż. Rafała Madońskiego
 Prof. dr hab. inż. Tadeusz Uhl Katedra Robotyki i Mechatroniki Akademia Górniczo Hutnicza Al. Mickiewicza 30 30-059 Kraków Kraków 09.06.2016 Opinia o pracy doktorskiej pt. On active disturbance rejection
Prof. dr hab. inż. Tadeusz Uhl Katedra Robotyki i Mechatroniki Akademia Górniczo Hutnicza Al. Mickiewicza 30 30-059 Kraków Kraków 09.06.2016 Opinia o pracy doktorskiej pt. On active disturbance rejection
LABORATORIUM Z FIZYKI
 LABORATORIUM Z FIZYKI LABORATORIUM Z FIZYKI I PRACOWNIA FIZYCZNA C w Gliwicach Gliwice, ul. Konarskiego 22, pokoje 52-54 Regulamin pracowni i organizacja zajęć Sprawozdanie (strona tytułowa, karta pomiarowa)
LABORATORIUM Z FIZYKI LABORATORIUM Z FIZYKI I PRACOWNIA FIZYCZNA C w Gliwicach Gliwice, ul. Konarskiego 22, pokoje 52-54 Regulamin pracowni i organizacja zajęć Sprawozdanie (strona tytułowa, karta pomiarowa)
Metodyka projektowania systemów sterowania Uwagi wstępne
 Uwagi wstępne Inżynieria sterowania (Control Engineering) odgrywa dziś fundamentalną rolę w nowoczesnych systemach technologicznych, Korzyści ze sterowania w przemyśle,. mogą być wielorakie - poprawa jakości
Uwagi wstępne Inżynieria sterowania (Control Engineering) odgrywa dziś fundamentalną rolę w nowoczesnych systemach technologicznych, Korzyści ze sterowania w przemyśle,. mogą być wielorakie - poprawa jakości
Opis przedmiotu. Karta przedmiotu - Badania operacyjne Katalog ECTS Politechniki Warszawskiej
 Kod przedmiotu TR.SIK306 Nazwa przedmiotu Badania operacyjne Wersja przedmiotu 2015/16 A. Usytuowanie przedmiotu w systemie studiów Poziom kształcenia Studia I stopnia Forma i tryb prowadzenia studiów
Kod przedmiotu TR.SIK306 Nazwa przedmiotu Badania operacyjne Wersja przedmiotu 2015/16 A. Usytuowanie przedmiotu w systemie studiów Poziom kształcenia Studia I stopnia Forma i tryb prowadzenia studiów
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Opis przedmiotu: Badania operacyjne
 Opis : Badania operacyjne Kod Nazwa Wersja TR.SIK306 Badania operacyjne 2013/14 A. Usytuowanie w systemie studiów Poziom Kształcenia Stopień Rodzaj Kierunek studiów Profil studiów Specjalność Jednostka
Opis : Badania operacyjne Kod Nazwa Wersja TR.SIK306 Badania operacyjne 2013/14 A. Usytuowanie w systemie studiów Poziom Kształcenia Stopień Rodzaj Kierunek studiów Profil studiów Specjalność Jednostka
Metrologia: organizacja eksperymentu pomiarowego
 Metrologia: organizacja eksperymentu pomiarowego (na podstawie: Żółtowski B. Podstawy diagnostyki maszyn, 1996) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Teoria eksperymentu: Teoria eksperymentu
Metrologia: organizacja eksperymentu pomiarowego (na podstawie: Żółtowski B. Podstawy diagnostyki maszyn, 1996) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Teoria eksperymentu: Teoria eksperymentu
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Metody optymalizacji Optimization methods Forma studiów: stacjonarne Poziom studiów II stopnia. Liczba godzin/tydzień: 1W, 1Ć
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: obowiązkowy w ramach treści dodatkowych Rodzaj zajęć: wykład, ćwiczenia Metody Optimization methods Forma studiów: stacjonarne Poziom studiów
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: obowiązkowy w ramach treści dodatkowych Rodzaj zajęć: wykład, ćwiczenia Metody Optimization methods Forma studiów: stacjonarne Poziom studiów
Politechnika Śląska Wydział Automatyki, Elektroniki i Informatyki Instytut Automatyki PRACA MAGISTERSKA
 Politechnika Śląska Wydział Automatyki, Elektroniki i Informatyki Instytut Automatyki PRACA MAGISTERSKA Temat: Badanie strefy ciszy w falowodzie akustycznym w funkcji odległości mikrofonu błędu od głośnika
Politechnika Śląska Wydział Automatyki, Elektroniki i Informatyki Instytut Automatyki PRACA MAGISTERSKA Temat: Badanie strefy ciszy w falowodzie akustycznym w funkcji odległości mikrofonu błędu od głośnika
Badania operacyjne. Michał Kulej. semestr letni, Michał Kulej () Badania operacyjne semestr letni, / 13
 Badania operacyjne semestr letni, / 13") Badania operacyjne Michał Kulej semestr letni, 2012 Michał Kulej () Badania operacyjne semestr letni, 2012 1/ 13 Literatura podstawowa Wykłady na stronie: www.ioz.pwr.wroc.pl/pracownicy/kulej Trzaskalik
Badania operacyjne Michał Kulej semestr letni, 2012 Michał Kulej () Badania operacyjne semestr letni, 2012 1/ 13 Literatura podstawowa Wykłady na stronie: www.ioz.pwr.wroc.pl/pracownicy/kulej Trzaskalik
Filtr Kalmana. Struktury i Algorytmy Sterowania Wykład 1-2. prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz
 Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
OpenAI Gym. Adam Szczepaniak, Kamil Walkowiak
 OpenAI Gym Adam Szczepaniak, Kamil Walkowiak Plan prezentacji Programowanie agentowe Uczenie przez wzmacnianie i problemy związane z rozwojem algorytmów Charakterystyka OpenAI Gym Biblioteka gym Podsumowanie
OpenAI Gym Adam Szczepaniak, Kamil Walkowiak Plan prezentacji Programowanie agentowe Uczenie przez wzmacnianie i problemy związane z rozwojem algorytmów Charakterystyka OpenAI Gym Biblioteka gym Podsumowanie
Sterowanie optymalne
 Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
Sterowanie optymalne Sterowanie Procesami Ciągłymi 2017 Optymalizacja statyczna funkcji Funkcja celu/kryterialna/kosztów Ograniczenie Q(x) min x x = arg min Q(x) x x X, gdzie X zbiór rozwiązań dopuszczalnych
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Dr hab. inż. Jan Duda. Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji
 Automatyzacja i Robotyzacja Procesów Produkcyjnych Dr hab. inż. Jan Duda Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji Podstawowe pojęcia Automatyka Nauka o metodach i układach sterowania
Automatyzacja i Robotyzacja Procesów Produkcyjnych Dr hab. inż. Jan Duda Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji Podstawowe pojęcia Automatyka Nauka o metodach i układach sterowania
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa. Marzec Podstawy teorii optymalizacji Oceanotechnika, II stop., sem.
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. II stop., sem. I, Kierunek Oceanotechnika, Spec. Okrętowe Podstawy teorii optymalizacji Wykład 1 M. H. Ghaemi Marzec 2016 Podstawy teorii
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. II stop., sem. I, Kierunek Oceanotechnika, Spec. Okrętowe Podstawy teorii optymalizacji Wykład 1 M. H. Ghaemi Marzec 2016 Podstawy teorii
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Przetwarzanie AC i CA
 1 Elektroniki Elektroniki Elektroniki Elektroniki Elektroniki Katedr Przetwarzanie AC i CA Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 1. Cel ćwiczenia 2 Celem ćwiczenia jest
1 Elektroniki Elektroniki Elektroniki Elektroniki Elektroniki Katedr Przetwarzanie AC i CA Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 1. Cel ćwiczenia 2 Celem ćwiczenia jest
Process Analytical Technology (PAT),
,") Analiza danych Data mining Sterowanie jakością Analityka przez Internet Process Analytical Technology (PAT), nowoczesne podejście do zapewniania jakości wg. FDA Michał Iwaniec StatSoft Polska StatSoft
Analiza danych Data mining Sterowanie jakością Analityka przez Internet Process Analytical Technology (PAT), nowoczesne podejście do zapewniania jakości wg. FDA Michał Iwaniec StatSoft Polska StatSoft
Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI
 Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena LABORATORIUM 4. PODSTAW 5. AUTOMATYKI") Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA7b 1 Badanie jednoobwodowego układu regulacji
Statystyka od podstaw Janina Jóźwiak, Jarosław Podgórski
 Statystyka od podstaw Janina Jóźwiak, Jarosław Podgórski Książka jest nowoczesnym podręcznikiem przeznaczonym dla studentów uczelni i wydziałów ekonomicznych. Wykład podzielono na cztery części. W pierwszej
Statystyka od podstaw Janina Jóźwiak, Jarosław Podgórski Książka jest nowoczesnym podręcznikiem przeznaczonym dla studentów uczelni i wydziałów ekonomicznych. Wykład podzielono na cztery części. W pierwszej
Wykład 9: Polimorfizm i klasy wirtualne
 Programowanie obiektowe Wykład 9: i klasy wirtualne 1 dr Artur Bartoszewski - Programowanie obiektowe, sem. 1I- WYKŁAD Programowanie obiektowe i metody wirtualne 2 W programowaniu obiektowym polimorfizm
Programowanie obiektowe Wykład 9: i klasy wirtualne 1 dr Artur Bartoszewski - Programowanie obiektowe, sem. 1I- WYKŁAD Programowanie obiektowe i metody wirtualne 2 W programowaniu obiektowym polimorfizm
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: przedmiot obowiązkowy w ramach treści kierunkowych, moduł kierunkowy ogólny Rodzaj zajęć: wykład, ćwiczenia I KARTA PRZEDMIOTU CEL PRZEDMIOTU
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: przedmiot obowiązkowy w ramach treści kierunkowych, moduł kierunkowy ogólny Rodzaj zajęć: wykład, ćwiczenia I KARTA PRZEDMIOTU CEL PRZEDMIOTU
Badania operacyjne. Ćwiczenia 1. Wprowadzenie. Filip Tużnik, Warszawa 2017
 Badania operacyjne Ćwiczenia 1 Wprowadzenie Plan zajęć Sprawy organizacyjne (zaliczenie, nieobecności) Literatura przedmiotu Proces podejmowania decyzji Problemy decyzyjne w zarządzaniu Badania operacyjne
Badania operacyjne Ćwiczenia 1 Wprowadzenie Plan zajęć Sprawy organizacyjne (zaliczenie, nieobecności) Literatura przedmiotu Proces podejmowania decyzji Problemy decyzyjne w zarządzaniu Badania operacyjne
Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne
 Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka finansowa Rocznik: 2014/2015 Język wykładowy: Polski Semestr
Wydział: Matematyki Stosowanej Kierunek: Matematyka Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne Specjalność: Matematyka finansowa Rocznik: 2014/2015 Język wykładowy: Polski Semestr
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Objaśnienia oznaczeń w symbolach K przed podkreślnikiem kierunkowe efekty kształcenia W kategoria wiedzy
 Efekty kształcenia dla kierunku studiów FIZYKA - studia II stopnia, profil ogólnoakademicki - i ich odniesienia do efektów kształcenia w obszarze nauk ścisłych Kierunek studiów fizyka należy do obszaru
Efekty kształcenia dla kierunku studiów FIZYKA - studia II stopnia, profil ogólnoakademicki - i ich odniesienia do efektów kształcenia w obszarze nauk ścisłych Kierunek studiów fizyka należy do obszaru
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
KATEDRA INFORMATYKI TECHNICZNEJ. Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych. ćwiczenie 204
 Opracował: prof. dr hab. inż. Jan Kazimierczak KATEDA INFOMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 204 Temat: Hardware'owa implementacja automatu skończonego pełniącego
Opracował: prof. dr hab. inż. Jan Kazimierczak KATEDA INFOMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 204 Temat: Hardware'owa implementacja automatu skończonego pełniącego
Elektrotechnika II stopień ogólnoakademicki. niestacjonarne. przedmiot specjalnościowy. obowiązkowy polski. semestr letni. tak
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 (aktualizacja 2017/2018) Metody estymacji parametrów i sygnałów Estimation
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 (aktualizacja 2017/2018) Metody estymacji parametrów i sygnałów Estimation
Przetwarzanie A/C i C/A
 Przetwarzanie A/C i C/A Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 Rev. 204.2018 (KS) 1 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z przetwornikami: analogowo-cyfrowym
Przetwarzanie A/C i C/A Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 Rev. 204.2018 (KS) 1 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z przetwornikami: analogowo-cyfrowym
KARTA PRZEDMIOTU. 12. PRZEDMIOTOWE EFEKTY KSZTAŁCENIA Odniesienie do kierunkowych efektów kształcenia (symbol)
") KARTA PRZEDMIOTU 1. NAZWA PRZEDMIOTU: Ekonometria 2. KIERUNEK: MATEMATYKA 3. POZIOM STUDIÓW: I stopnia 4. ROK/ SEMESTR STUDIÓW: III/6 5. LICZBA PUNKTÓW ECTS: 5 6. LICZBA GODZIN: 30 / 30 7. TYP PRZEDMIOTU
KARTA PRZEDMIOTU 1. NAZWA PRZEDMIOTU: Ekonometria 2. KIERUNEK: MATEMATYKA 3. POZIOM STUDIÓW: I stopnia 4. ROK/ SEMESTR STUDIÓW: III/6 5. LICZBA PUNKTÓW ECTS: 5 6. LICZBA GODZIN: 30 / 30 7. TYP PRZEDMIOTU
Egzamin / zaliczenie na ocenę*
 Zał. nr 4 do ZW /01 WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : AUTOMATYKA I ROBOTYKA Nazwa w języku angielskim: AUTOMATION AND ROBOTICS Kierunek studiów (jeśli dotyczy):
Zał. nr 4 do ZW /01 WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : AUTOMATYKA I ROBOTYKA Nazwa w języku angielskim: AUTOMATION AND ROBOTICS Kierunek studiów (jeśli dotyczy):
Wprowadzenie do teorii ekonometrii. Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe
 Wprowadzenie do teorii ekonometrii Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe Zajęcia Wykład Laboratorium komputerowe 2 Zaliczenie EGZAMIN (50%) Na egzaminie obowiązują wszystkie informacje
Wprowadzenie do teorii ekonometrii Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe Zajęcia Wykład Laboratorium komputerowe 2 Zaliczenie EGZAMIN (50%) Na egzaminie obowiązują wszystkie informacje
MODELOWANIE, IDENTYFIKACJA I SYMULACJA KOMPUTEROWA
 MODELOWANIE, IDENTYFIKACJA I SYMULACJA KOMPUTEROWA SS-II, AiR, I sem. Wykład 45h, Laboratorium 30h Wykład: dr inż. Jan Deskur, pok. 626, tel. 665-2735, 8776135 (dom) Jan.Deskur@put.poznan.pl Zakład Sterowania
MODELOWANIE, IDENTYFIKACJA I SYMULACJA KOMPUTEROWA SS-II, AiR, I sem. Wykład 45h, Laboratorium 30h Wykład: dr inż. Jan Deskur, pok. 626, tel. 665-2735, 8776135 (dom) Jan.Deskur@put.poznan.pl Zakład Sterowania
Fizyka komputerowa(ii)
") Instytut Fizyki Fizyka komputerowa(ii) Studia magisterskie Prowadzący kurs: Dr hab. inż. Włodzimierz Salejda, prof. PWr Godziny konsultacji: Poniedziałki i wtorki w godzinach 13.00 15.00 pokój 223 lub
Instytut Fizyki Fizyka komputerowa(ii) Studia magisterskie Prowadzący kurs: Dr hab. inż. Włodzimierz Salejda, prof. PWr Godziny konsultacji: Poniedziałki i wtorki w godzinach 13.00 15.00 pokój 223 lub
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.