AMRobot. Platforma mini robota edukacyjnego
|
|
|
- Tomasz Majewski
- 9 lat temu
- Przeglądów:
Transkrypt
1 AMRobot Platforma mini robota edukacyjnego Producent: AMEX Research Corporation Technologies Białystok, ul. Modlińska 1 Tel.: , Fax: amexinfo@amex.pl

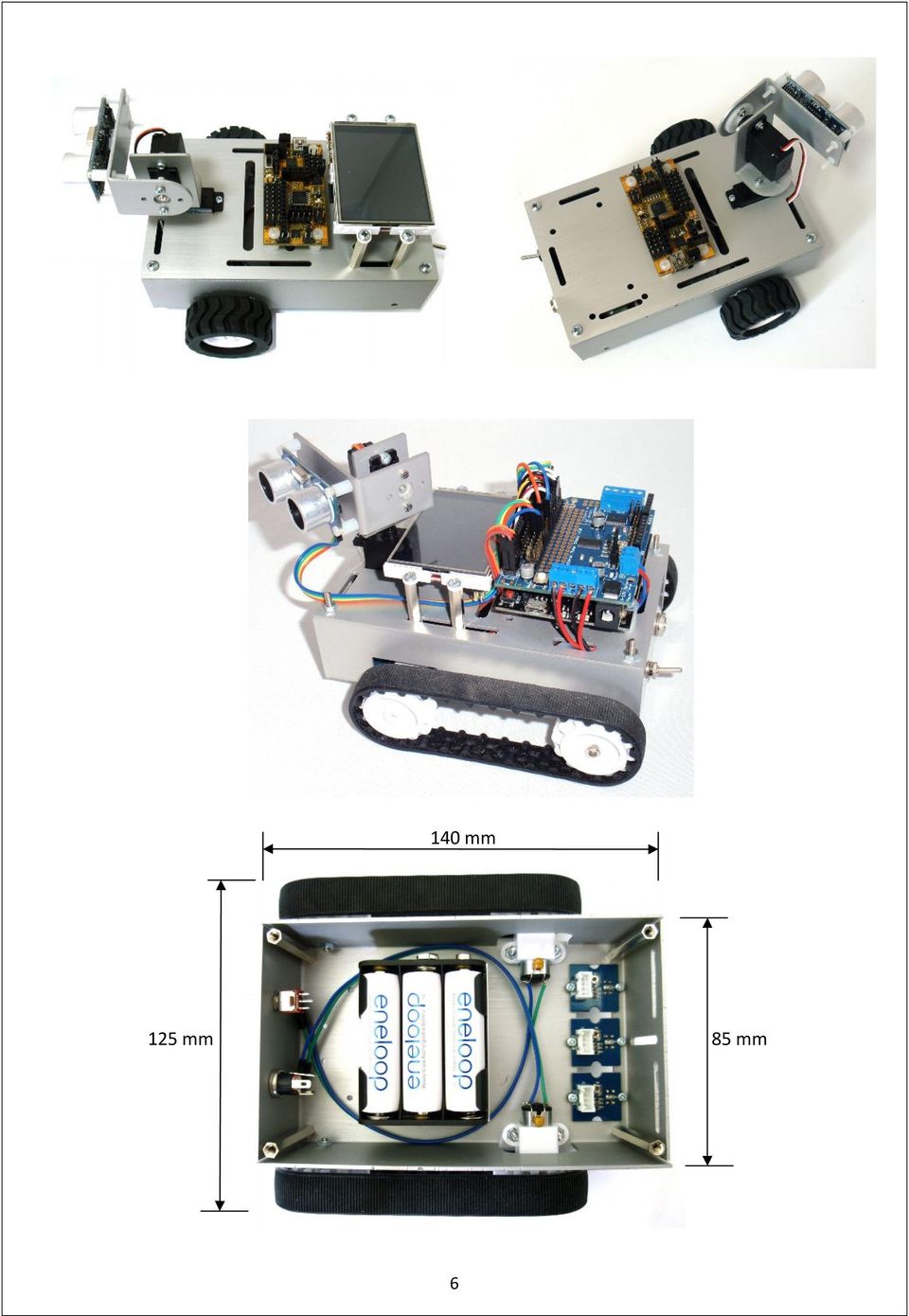
2 Platforma mini robota edukacyjnego AMRobot Budowa platformy Platforma AMRobot jest przeznaczona do budowy edukacyjnego mini robota mobilnego z możliwością wyboru jednego z trzech rodzajów układu napędowego (jezdnego): 2 kołowy (z kulką podporową), 4 kołowy oraz gąsienicowy. Platforma AMRobot jest przeznaczona dla osób, które zamierzają nauczyć się programowania mini robota mobilnego bez konieczności własnoręcznego projektowania i czasochłonnego wykonywania całej konstrukcji mechanicznej mini robota od podstaw. Wystarczy zgodnie z instrukcją połączyć za pomocą śrub i nakrętek dostarczone w zestawie elementy mechaniczne i elektryczne oraz podłączyć do płytki mikrokontrolera (sterownika) dostarczone czujniki oraz zasilanie. Platforma jest idealnym rozwiązaniem zarówno dla indywidualnych użytkowników (początkujących i bardziej zaawansowanych hobbystów, uczniów, studentów) jak i do pracy np. w grupach uczniów w szkołach ponadpodstawowych na innowacyjnych zajęciach technicznych z zakresu elektroniki i robotyki. Konstrukcja platformy oferuje duży wybór rozwiązań w zakresie zarówno części mechanicznej jak i elektronicznej. Platforma wykonana jest z laserowo wycinanych elementów aluminiowych i poddanych obróbce anodowania oraz barwienia. Technologa wykonania platformy zapewnia dużą jej sztywność, trwałość i estetykę. Wszystkie elementy mechaniczne są bardzo dobrze dopasowane do siebie, co ułatwia montaż wszystkich elementów. Sama platforma mini robota (bez dodatkowej zabudowy) składa się z tylko z dwóch elementów (płyt montażowych) połączonych ze sobą za pomocą czterech tulejek dystansowych oraz śrub M3. Niewielkie wymiary platformy mini robota (140 mm x 125 mm) oraz solidność i trwałość jego konstrukcji są dodatkową zaletą w prowadzeniu np. grupowych zajęć technicznych z zakresu robotyki w szkołach i różnych szkoleniach wymagających mobilności sprzętu edukacyjnego ze strony osób prowadzących zajęcia. Platforma przystosowana do zainstalowania modułu mikrokontrolera wraz ze sterownikiem silników oraz różnych czujników takich jak: 3 czujniki linii, ultradźwiękowy czujnik odległości wraz z układem skanującym sterowanym za pomocą dwóch miniaturowych serwomechanizmów, 3 osiowy akcelerometr, odbiornik podczerwieni do bezprzewodowej komunikacji z mikrokontrolerem za pomocą nadajnika w postaci kompatybilnego pilota. Użytkownik może korzystać z dostępnych w internecie bibliotek oraz programów ułatwiających korzystanie z platformy mini robota AMRobot. Do zestawu dołączona jest płyta CD z instrukcją montażu platformy AMRobot wraz przykładowymi programami demonstrującymi m.in. sterowanie silnikami i obsługą programową serwomechanizmów, wyświetlacza graficznego i różnych czujników. Platforma dostępna jest w trzech kolorach: srebrny, złoty i czarny. Na specjalne zamówienie oferowane są kolory: czerwony, zielony i niebieski. 2

3 Poniżej pokazano fotografie platformy AMRobot dla trzech wersji układu jezdnego. 3

4 4

5 5

6 140 mm 125 mm 85 mm 6
7 Konstrukcja platformy pozwala na łatwą zmianę rodzaju napędu poprzez wymianę dwóch przednich kół napędowych i zamontowanie dodatkowych dwóch kół tylnych oraz ewentualnie uzupełnienie zestawu w dwa pasy gąsienicowe. W wersji robota dwukołowego należy dodatkowo zamontować kulkę podporową w tylnej, dolnej części platformy. Możliwość zmiany układu jezdnego ma duże walory edukacyjne z powodu ewentualnych modyfikacji oprogramowania dotyczącego sterowania silnikami. Rodzaj napędu ma bowiem wpływ na właściwości trakcyjne i dynamikę ruchu mini robota. W przedniej części platformy (górna płyta montażowa) znajdują się otwory montażowe pod serwomechanizm układu skanującego (w zakresie 180 stopni w poziomie i w pionie) np. dla dalmierza ultradźwiękowego, kolorowej minikamery lub miniaturowego robotycznego ramienia. Układ skanujący może być w dwóch wersjach: skanowanie tylko w osi poziomej (180 stopni) oraz skanowanie w dwóch osiach (180 stopni w osi poziomej i pionowej). Dodatkowe otwory w górnej części platformy służą do zamontowania modułu mikrokontrolera wraz ze sterownikiem silników oraz inteligentnego, dotykowego modułu wyświetlacza graficznego. Moduł wyświetlacza graficznego nie jest konieczny, ale może być bardzo użyteczny w bardziej zaawansowanych wersjach oprogramowania (np. ustawianie i monitorowanie prędkości obrotowej silników, monitorowanie napięcia zasilania, zmiany konfiguracji oprogramowania bez konieczności użycia zewnętrznego komputera). Powiększa to walory edukacyjne i eksploatacyjne mini robota dla bardziej zaawansowanych użytkowników. W dolnej części platformy znajdują się otwory montażowe dla dwóch silników napędowych, dodatkowych dwóch kół tylnych oraz kulki podporowej. Dolna część platformy zawiera także prostokątny otwór do zamontowania 3 czujników linii. Z przodu platformy znajdują się otwory do zamontowania np. chwytaka sterowanego serwomechanizmem lub zderzak w postaci pługa do zawodów minisumo z innymi robotami. Do napędu mini robota zastosowano dwa mikro silniki Pololu HP z metalową przekładnią 150:1 lub 210:1. Zmiana konfiguracji napędu nie wymaga wymiany silników napędowych a jedynie zmiany kół w układzie jezdnym. Zastosowane silniki mimo małych rozmiarów posiadają duży moment obrotowy zapewniając dobrą dynamikę ruchu. Użytkownik może doświadczalnie zmieniać parametry ruchu (w drodze programowania) uzyskując optymalne dla tego mini robota właściwości trakcyjne. Silniki napędowe mogą współpracować z enkoderami umieszczonymi pod każdym silnikiem. Użycie enkoderów zalecane jest dla bardziej zaawansowanych użytkowników, którzy stosując sterowanie typy PID mogą uzyskać optymalne parametry ruchu podczas skrętów w zależności np. od aktualnej prędkości mini robota i informacji uzyskanej z czujników linii lub ultradźwiękowego czujnika odległości mini robota od przeszkody. Platforma może być sterowana przy pomocy dowolnego układu mikrokontrolera ze sterownikiem silników, np. modułu Arduino dla którego przewidziano odpowiednie rozmieszczenie otworów montażowych. 7

8 Zasilanie Zmontowana platforma AMRobot zasilana jest z pakietu 6-ciu wysokiej jakości akumulatorów NiMH wielkości AA (R6) typu Eneloop firmy Sanyo o nominalnym łącznym napięciu 7,2V i pojemności ok mah. Akumulatory umieszczone są w koszyku pomiędzy dwoma kątownikami umieszczonymi w dolnej części platformy. Ładowanie akumulatorów odbywa się za pomocą zewnętrznej ładowarki sieciowej podłączanej do gniazda w tylnej części platformy. Nie ma więc konieczności otwierania obudowy i wyjmowania akumulatorów z koszyka w celu ich naładowania. Deklarowana przez producenta trwałość akumulatorów typu Eneloop wynosi ok cykli ładowań. Użytkownik może także wykorzystać inne akumulatory (pakiety NiMH o napięciu nominalnym 7,2V tj. 1,2V na każdą baterię po zdemontowaniu koszyka. Rekomendowana pojemność elektryczna powinna wynosić mah. Nie zaleca się używania baterii alkalicznych R6 (maksymalne napięcie zasilania nie powinno przekroczyć 8V). Poza tym koszty eksploatacji akumulatorów są wielokrotnie niższe niż baterii alkalicznych. Specyfikacja Platforma AMRobot oferowana jest w 3-ech wersjach mechanicznych różniących się tylko układem jezdnym, przy wykorzystaniu tych samych silników firmy Pololu o przekładni 1:150 lub 1:210. Przy wyborze wersji platformy należy podać przekładnię silników. Większa przekładnia (210:1) zapewnia większy moment obrotowy przy zmniejszonej prędkości obrotowej. Część elektroniczna platformy (moduł mikrokontrolera, sterownika, czujniki itp.) oferowana jest oddzielnie) w celu indywidualnego skompletowania mini robota przez użytkownika. Każda wersja platformy posiada możliwość montażu modułu w wersji Arduino Uno, Leonardo oraz sterownika silników lub też kompletny sterownik firmy Dagu (kompatybilny z Arduino) wraz ze zintegrowanym sterownikiem silników i dodatkowymi czujnikami. Część mechaniczna Wersja 1: Platforma dwukołowa z kulką podporową wraz z dwoma silnikami (przekładnia 1:150 lub 1:210). Wersja 2 Platforma 4 kołowa (dwa koła czynne z przodu platformy oraz 2 koła bierne z tyłu platformy) wraz z dwoma silnikami (przekładnia 1:150 lub 1:210). Wersja 3 Platforma z gąsienicowym układem jezdnym wraz z dwoma silnikami (przekładnia 1:150 lub 1:210). Każdy układ jezdny można dodatkowo zakupić do tej samej platformy (bez konieczności wymiany silników). 8

9 Specyfikacja silników (firmy Pololu) Małe, lekkie a zarazem mocne i trwałe silniki firmy Pololu z metalową przekładnią wykorzystywane są w platformie minirobota AMRobot jako jednostki napędowe. Silniki mogą być zasilane napięciem do 9V, moc użyteczną uzyskują powyżej 3V. Optymalne napięcie, przy którym relacja mocy do sprawności jest najkorzystniejsza, wynosi 6V. W platformie AMRobot maksymalna wartość napięcia zasilającego z pakietu akumulatorów wynosi 7,2V (6 x 1,2V). Silnik Pololu HP 150:1 Napięcie zasilania: 3V - 9V Przełożenie: 150:1 Prędkość obrotowa bez obciążenia (6V): 200 obr/min. Prąd bez obciążenia (6V): 70 ma Prąd przy zatrzymanym wale (6V): 1600 ma (Uwaga: przy użyciu w platformie sterowników firmy Adafruit lub Dagu jest automatyczne zabezpieczenie prądowe w przypadku zatrzymania silników). Moment obrotowy: 2,9 kg cm (0,284 Nm) Wymiary korpusu: 24 x 10 x 12 mm Silnik Pololu HP 210:1 Napięcie zasilania: 3V - 9V Przełożenie: 210:1 Prędkość obrotowa bez obciążenia (6V): 140 obr/min. Prąd bez obciążenia (6V): 70 ma Prąd przy zatrzymanym wale (6V): 1600 ma (Uwaga: przy użyciu w platformie sterowników firmy Adafruit lub Dagu jest automatyczne zabezpieczenie prądowe w przypadku zatrzymania silników). Moment obrotowy: 3,6 kg cm (0,353 Nm) Wymiary korpusu: 24 x 10 x 12 mm Część elektroniczna Moduł mikrokontrolera W platformie mini robota AMRobot można zastosować moduł mikrokontrolera w wersji Arduino Uno, Arduino Leonardo z rozszerzeniem o sterownik silników firmy Adafruit lub też moduł mikrokontrolera firmy Dagu (o nazwie Micro Magician Robot Controller V2), który jest perfekcyjnym połączeniem (na jednej małej płytce) zarówno modułu mikrokontrolera w pełni kompatybilnego z Arduino oraz sterownika silników. Dodatkowo na tej samej płytce znajduje się 3 osiowy akcelerometr oraz odbiornik podczerwieni do bezprzewodowej komunikacji z mikrokontrolerem za pomocą nadajnika w postaci kompatybilnego pilota. Alternatywnym rozwiązaniem jest zastosowanie innego kompletnego kontrolera także firmy Dagu (o nazwie Dagu Arduino Mini Driver Board), który jest idealnym rozwiązaniem dla początkujących użytkowników. W dalszej części opisu podano specyfikację dwóch typów modułów mikrokontrolerów ze zintegrowanym sterownikiem silników Dagu Arduino oraz sterownik silników firmy Adafruit do współpracy z mikrokontrolerem w wersji Arduino Leonardo. Należy wspomnieć, że w platformie AMRobot można zastosować także inne, praktycznie dowolne rodzaje modułów mikrokontrolerów i sterowników silników, których zamontowanie będzie wymagało samodzielnego wykonania ewentualnych dodatkowych otworów 9
: 200 obr/min.")
10 montażowych na górnej płycie platformy. Otwory montażowe na tej płycie platformy są przewidziane do modułów Arduino i wyżej wspomnianych modułów firmy Dagu. Również można zamiast typowych modułów Arduino zastosować płytkę stykową współpracującą z odpowiednimi modułami mikrokontrolerów i sterowników silników z wyprowadzeniami (pinami) wtykanymi do płytki stykowej (np. moduł mikrokontrolera firmy Pololu typu A-Star 32U4 Micro oparty na module Leonardo oraz moduł z dwukanałowym sterownikiem silników prądu stałego typu TB6612FNG firmy Toshiba. Poniżej podano widok i skrótową specyfikację wybranych w/w modułów mikrokontrolerów i sterowników rekomendowanych do zastosowania w platformie AMRobot. Przykładowe programy (z komentarzami) podano w instrukcji platformy AMRobot. Moduły mikrokontrolerów i sterowników firmy DAGU (wymiary płytek: 30 mm x 60 mm) DAGU Arduino Micro Magician DAGU Arduino Mini Driver Board robot controller V2 10

11 Specyfikacja modułu sterownika Dagu Arduino Micro Magician robot controller Moduł Dagu Arduino Micro Magician robot controller jest perfekcyjnym sterownikiem przeznaczonym dla małych robotów. Mimo małych wymiarów płytki (30 mm x 60 mm) jest on w pełni wyposażony w funkcje, które nie występują w innych sterownikach. Posiada wszystkie niezbędne cechy do sterowania mini robotów. Wersja V2 tego sterownika jest w pełni kompatybilna ze środowiskiem programistycznym Arduino IDE. Podwójny mostek mostek H (FET): Praca w zakresie napięć zasilających od 2,5V do 9V. Mała rezystancja w czasie włączenia mostka (1,1Ω). Funkcja elektronicznego hamowania (funkcja ta jest idealna dla małych robotów w konieczności szybkiego zatrzymania robota). Ograniczenie prądowe ustawione na wartość 910 ma - zabezpieczenie przed dużym prądem przy zatrzymaniu wału silnika lub zwarciem. Informacja o zatrzymaniu wału silnika (zmiana stanu pinów FA i FB - Motor Stall Flags) Funkcja uśpienia w celu ograniczenia poboru mocy, kiedy silniki nie są używane. Biblioteka Arduino zawiera rozkazy upraszczające użycie silników DC i krokowych. 3 osiowy akcelerometr: Zakres pomiaru (ustawiony fabrycznie): ±1,5G. Może być ustawiony na ±6 G. Detekcja przyśpieszenia 0G (na pinie 0G det) do wykorzystania zewnętrznego przerwania w celu wyłączenia serwa lub silnika napędowego w przypadku upadku/zderzenia (w celu ochrony przekładni). Pomiar kąta nachylenia mini robota względem podłoża (zabezpieczenie przed upadkiem) Biblioteka Arduino zawiera instrukcje do obsługi akcelerometru (detekcja kierunku i amplitudy wartości przyśpieszenia podczas kolizji z przeszkodą. Odbiornik podczerwieni (IR) ze statusem LED: Sygnał odbiornika IR podłączony do pinu cyfrowego D4 pozwala na zdalnę sterowanie mini robota za pomocą pilota TV. Biblioteka Arduino zawiera dekoder odbieranych rozkazów z pilota TV zgodny ze standardem kodów firmy Sony (SIRC) dostarczając 128 wirtualnych przycisków. Dodatkowe odbiorniki podczerwieni (IR) mogą być podłączone do innych pinów - do odczytania ich stanów za pomocą biblioteki dekodera. Sterowanie serwomechanizmów (do 8 serw): Można podłączyć 8 miniaturowych serwomechanizmów do płytki sterownika, które będą zasilane z baterii zasilającej (akumulatora). Serwa zabezpieczone są przez przeciwnie spolaryzowaną diodę. Specyfikacja modułu sterownika DAGU Arduino Mini Driver Board Sterownik ten jest ekonomiczną wersją poprzedniego sterownika. Sterownik ten także zawiera 2 mostki typu H dla dwóch silników prądu stałego i jest kompatybilny z wersją Arduino IDE. Maksymalny prąd przy zatrzymaniu silnika wynosi 2A. Do płytki można podłączyć 8 serwomechanizmów. Sterownik zawiera również port do podłączenia modułu Bluetooth lub Xbee. Programowanie modułu odbywa się przez złącze interfejsu USB. Moduł jest może obsługiwać różne czujniki poprzez wejścia analogowe i cyfrowe. Bardziej szczegółowe dane techniczne obu modułów firmy DAGU znajdują się w instrukcji platformy mini robota AMRobot oraz w przykładowych programach. 11
. Funkcja elektronicznego hamowania (funkcja ta jest idealna dla małych robotów w konieczności szybkiego zatrzymania robota).")
12 Moduł sterownika (shield) firmy Adafruit Specyfikacja modułu sterownika firmy Adafruit Sterownik firmy Adafruit jest nowym, ulepszonym shieldem do sterowania silnikami: DC, krokowymi i serwomechanizmami. Sterownik posiada 4 mostki typu H, co pozwala obsłużyć aż 4 silniki prądu stałego lub 2 silniki krokowe. Dla potrzeb platformy AMRobot wykorzystane są tylko dwa mostki do zasilania dwóch silników Pololu HP. Sterowanie odbywa się poprzez interfejs I2C z modułu mikrokontrolera Arduino Leonardo. W odróżnieniu od innych rozwiązań sterownik ten nie korzysta z sygnałów PWM z modułu mikrokontrolera Arduino, lecz posiada własny układ drivera PWM typu TB6612 MOSFET (firmy Toshiba) dostarczający w pracy ciągłej 1,2A na 1 kanał oraz 3A chwilowo. Sterownik posiada wbudowane zabezpieczenie termiczne i przeciwprzepięciowe (wewnętrzna dioda). Tylko dwa piny (SDA i SCL) wymagane są do sterowania silników. Na płytce sterownika znajdują się dwa złącza do podłączenie serwomechanizmów oraz złącza terminalowe na kable AWG. Na potrzeby platformy mini robota AMRobot należy w module sterownika Adafruit zamontować dodatkowe złącza (w miejscu wolnych punktów lutowniczych w polu przeznaczonym dla użytkownika). Ułatwia to podłączenie czujników linii, ultradźwiękowego czujnika odległości, które muszą być podłączone do odpowiednich pinów modułu mikrokontrolera Arduino Leonardo. Płytka sterownika jest wetknięta do odpowiednich złącz płytki Arduino Leonardo. Biblioteka Arduino zawiera rozkazy do sterowania silników. Przykładowe programy z komentarzami) podano w instrukcji platformy AMRobot. UWAGA: Zestaw platformy AMRobot wymaga samodzielnego montażu. Na życzenie (za dodatkową opłatą) dostarczamy zmontowaną i skonfigurowaną wcześniej przez użytkownika platformę AMRobot zawierającą część mechaniczną i elektroniczną. Firma AMEX planuje opracowanie i publikowanie na swojej stronie internetowej ( darmowych programów demonstracyjnych oraz artykułów z zakresu elektroniki i robotyki przeznaczonych dla początkujących jak i bardziej zaawansowanych użytkowników platformy edukacyjnej mini robota AMRobot. 12
 dostarczający w")
13 ZAŁĄCZNIK Elementy platformy AMRobot Płyty montażowe, elementy do układu skanującego, gniazdo zasilające, przełącznik i pojemnik na akumulatory NiMH (6 x AA) Serwa do układu skanującego Gniazdo zasilające i przełącznik Płyta montażowa (dolna) Układ skanujący Płyta montażowa (górna) Pojemnik na akumulatory Kulka podporowa ½ (dla wersji 2 kołowej) 13
 Pojemnik na akumulatory Kulka podporowa ½ (dla wersji 2")
14 Silniki, elementy mocujące i koła przednie (42 mm x 19 mm) do układu 2 i 4 kołowego Koła tylne (42 mm x 19 mm) - do układu 4 kołowego Zestaw gąsienic z dwoma kołami przednimi i dwoma tylnymi 14

15 Widok wnętrza platformy (dolna płyta montażowa) mini robota z zamontowanymi elementami Zasada mocowania silnika do dolnej płyty montażowej Czujniki linii 15

16 Przykładowe wersje kolorystyczne płyt montażowych platformy AMRobot 16

17 Moduł wyświetlacza graficznego Ważną cechą platformy mini robota edukacyjnego AMRobot jest możliwość umieszczenia na górnej płycie montażowej inteligentnego modułu wyświetlacza graficznego firmy 4D Systems, który może także pracować samodzielnie, bez modułu nadrzędnego mikrokontrolera. Wyświetlacz graficzny w mini robocie może być bardzo przydatny w sytuacji konieczności szybkich zmian konfiguracji oprogramowania lub parametrów dotyczących pracy silników, ustawień regulatora PID itd. Wyświetlacz z ekranem dotykowym eliminuje stosowanie przycisków mechanicznych. Poza tym monitorowanie stanu robota w formie graficznych komunikatów jest cennym uzupełnieniem realizowanych funkcji programowych. Ponadto moduł wyświetlacza zawiera pamięć do przechowywania plików graficznych, animacji oraz plików video i audio (wbudowane złącze µsd). Dla potrzeb platformy mini robota AMRobot można zastosować dowolny wyświetlacz, jednak zalecany jest inteligentny moduł wyświetlacza graficznego firmy 4D Systems, który może być szybko skonfigurowany z zewnętrznym, nadrzędnym mikrokontrolerem (np. Arduino) poprzez interfejs szeregowy (UART) lub pracę w trybie samodzielnego modułu graficznego. Wybór trybu pracy dokonywany jest z ogólnodostępnego pliku konfiguracyjnego, udostępnionego przez producenta (4D Systems). Tryb pracy z interfejsem szeregowym w konfiguracji modułu podporządkowanego jest wygodny w przypadku stosowania dowolnych, zewnętrznych mikrokontrolerów. Stosowanie w/w inteligentnego modułu graficznych praktycznie eliminuje ryzyko niepowodzenia przy projektowaniu graficznych interfejsów nawet przez mniej doświadczonych użytkowników. Firma 4D Systems oferuje także darmowe oprogramowanie 4D- Workshops IDE oraz mocny edytor graficzny 4D-ViSi Genie przeznaczony do prostego i intuicyjnego pozycjonowania graficznych elementów używanych np. do sterowania i wizualizacji w układach kontrolno-pomiarowych robotyki i automatyki. Są to np. przyciski, mierniki pomiarowe, suwaki, pokrętła, przełączniki itd. Nie wymaga to znajomości języka programowania wyświetlacza dla którego kod powstaje automatycznie (w tle) podczas graficznego pozycjonowania w edytorze wyświetlacza niezbędnych elementów graficznych. Pozwala to na eliminację częstego zapisywania kodu do modułu wyświetlacza podczas projektowania. 17

AMEX Mini Robot Platforma mini robota edukacyjnego
 AMEX Mini Robot Platforma mini robota edukacyjnego (wersja 1.0) Producent: AMEX Research Corporation Technologies 15-692 Białystok, ul. Elektronowa 6 Tel.: 602723295, Fax: 85 6530703 e-mail: amexinfo@amex.pl
AMEX Mini Robot Platforma mini robota edukacyjnego (wersja 1.0) Producent: AMEX Research Corporation Technologies 15-692 Białystok, ul. Elektronowa 6 Tel.: 602723295, Fax: 85 6530703 e-mail: amexinfo@amex.pl
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
mbot Ranger Robot edukacyjny 3-w-1
 mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
- WALKER Czteronożny robot kroczący
 - WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
- WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
Zestaw Startowy EvB. Więcej informacji na stronie: http://and-tech.pl/zestaw-evb-5-1/
 Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Zgrana para - NerO i CleO
 1 Zgrana para NerO i CleO Zgrana para - NerO i CleO Wyświetlacze inteligentne CleO, opracowane przez firmę Bridgetek (FTDI) są ciekawą propozycją dla elektroników, którzy zamierzają wyposażyć swoją aplikację
1 Zgrana para NerO i CleO Zgrana para - NerO i CleO Wyświetlacze inteligentne CleO, opracowane przez firmę Bridgetek (FTDI) są ciekawą propozycją dla elektroników, którzy zamierzają wyposażyć swoją aplikację
MOBOT RoboSnake. Moduł wieloczłonowego robota
 MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
MOBOT-EXPLORER Wersja v2 Platforma robota mobilnego dla celów rozbudowy, edukacyjnych i uczelnianych
 Instrukcja obsługi MOBOT-EXPLORER Wersja v2 Platforma robota mobilnego dla celów rozbudowy, edukacyjnych i uczelnianych P.P.H. WObit E.K.J. Ober s.c. Dęborzyce 16, 62-045 Pniewy tel. 48 61 22 27 422, fax.
Instrukcja obsługi MOBOT-EXPLORER Wersja v2 Platforma robota mobilnego dla celów rozbudowy, edukacyjnych i uczelnianych P.P.H. WObit E.K.J. Ober s.c. Dęborzyce 16, 62-045 Pniewy tel. 48 61 22 27 422, fax.
KAmduino UNO. Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO
 Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO to płytka rozwojowa o funkcjonalności i wymiarach typowych dla Arduino UNO. Dzięki wbudowanemu mikrokontrolerowi ATmega328P i
Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO to płytka rozwojowa o funkcjonalności i wymiarach typowych dla Arduino UNO. Dzięki wbudowanemu mikrokontrolerowi ATmega328P i
INSTRUKCJA UŻYTKOWNIKA. Mini rejestrator cyfrowy MD-80P
 INSTRUKCJA UŻYTKOWNIKA Mini rejestrator cyfrowy MD-80P 1 Przedstawiony symbol informuje, że danego urządzenia elektrycznego lub elektronicznego, po zakończeniu jego eksploatacji, nie wolno wyrzucać razem
INSTRUKCJA UŻYTKOWNIKA Mini rejestrator cyfrowy MD-80P 1 Przedstawiony symbol informuje, że danego urządzenia elektrycznego lub elektronicznego, po zakończeniu jego eksploatacji, nie wolno wyrzucać razem
PX342. Driver PWM 1x10A INSTRUKCJA OBSŁUGI
 PX342 Driver PWM 1xA INSTRUKCJA OBSŁUGI R SPIS TREŚCI 1. Opis ogólny... 3 2. Warunki bezpieczeństwa... 3 3. Opis złączy i elementów sterowania... 4 4. Funkcja smooth... 4 5. Ustawianie adresu DMX... 5
PX342 Driver PWM 1xA INSTRUKCJA OBSŁUGI R SPIS TREŚCI 1. Opis ogólny... 3 2. Warunki bezpieczeństwa... 3 3. Opis złączy i elementów sterowania... 4 4. Funkcja smooth... 4 5. Ustawianie adresu DMX... 5
Spis treści. Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
Autonomiczny robot mobilny LF3 klasy linefollower. Jacek Jankowski
 Autonomiczny robot mobilny LF3 klasy linefollower Jacek Jankowski Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 16 marca 2014 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Założenia projektu 2 3
Autonomiczny robot mobilny LF3 klasy linefollower Jacek Jankowski Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 16 marca 2014 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Założenia projektu 2 3
Raport z budowy robota Krzysio
 Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
ZL8AVR. Płyta bazowa dla modułów dipavr
 ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
LITEcomp. Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19
 LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS..
 Strona 1/11 Układ ENI-EBUS/URSUS Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS.. Układ ten umożliwia: napędzanie i hamowanie
Strona 1/11 Układ ENI-EBUS/URSUS Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS.. Układ ten umożliwia: napędzanie i hamowanie
INSTRU KCJA UŻYTKOWNIKA
 INSTRU KCJA UŻYTKOWNIKA 1 Spis treści 1. Elementy zestawu... 3 2. Instalacja baterii... 5 a. W kontrolerze... 5 b. W joysticku... 5 3. Podłączenie urządzeń... 6 4. Podłączenie kontrolera do komputera.
INSTRU KCJA UŻYTKOWNIKA 1 Spis treści 1. Elementy zestawu... 3 2. Instalacja baterii... 5 a. W kontrolerze... 5 b. W joysticku... 5 3. Podłączenie urządzeń... 6 4. Podłączenie kontrolera do komputera.
Szczegółowy Opis Przedmiotu Zamówienia- Część I
 Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
KAmduino UNO. Rev Źródło:
 KAmduino UNO Rev. 20170811113756 Źródło: http://wiki.kamami.pl/index.php?title=kamduino_uno Spis treści Podstawowe cechy i parametry... 2 Wyposażenie standardowe... 3 Schemat elektryczny... 4 Mikrokontroler
KAmduino UNO Rev. 20170811113756 Źródło: http://wiki.kamami.pl/index.php?title=kamduino_uno Spis treści Podstawowe cechy i parametry... 2 Wyposażenie standardowe... 3 Schemat elektryczny... 4 Mikrokontroler
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
1. Opis urządzenia. 2. Zastosowanie. 3. Cechy urządzenia -3-
 INSTRUKCJA OBSŁUGI Spis treści Spis treści... 2 1. Opis urządzenia... 3 2. Zastosowanie... 3 3. Cechy urządzenia... 3 4. Sposób montażu... 4 4.1. Uniwersalne wejścia... 4 4.2. Uniwersalne wyjścia... 4
INSTRUKCJA OBSŁUGI Spis treści Spis treści... 2 1. Opis urządzenia... 3 2. Zastosowanie... 3 3. Cechy urządzenia... 3 4. Sposób montażu... 4 4.1. Uniwersalne wejścia... 4 4.2. Uniwersalne wyjścia... 4
PX147. LED 3 W Module INSTRUKCJA OBSŁUGI
 PX147 LED 3 W Module INSTRUKCJA OBSŁUGI R SPIS TREŚCI 1. Opis ogólny... 1 2. Warunki bezpieczeństwa... 1 3. Opis elementu świecącego... 2 3.1. Moduł do zabudowy... 2 3.2. Moduł z uchwytem... 3 4. Sposób
PX147 LED 3 W Module INSTRUKCJA OBSŁUGI R SPIS TREŚCI 1. Opis ogólny... 1 2. Warunki bezpieczeństwa... 1 3. Opis elementu świecącego... 2 3.1. Moduł do zabudowy... 2 3.2. Moduł z uchwytem... 3 4. Sposób
LITEcompLPC1114. Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Sponsorzy:
 Sponsorzy:") LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM
 Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Razem droga staje się łatwiejsza. Automatyzacja i sterowanie bram: z firmą BECKER. Razem łatwiej.
 Razem droga staje się łatwiejsza. Automatyzacja i sterowanie bram: z firmą BECKER. Razem łatwiej. Łatwiej otworzyć sobie drogę... Napęd Becker Jasne, logiczne, zrozumiałe to właśnie te cechy oraz hasło
Razem droga staje się łatwiejsza. Automatyzacja i sterowanie bram: z firmą BECKER. Razem łatwiej. Łatwiej otworzyć sobie drogę... Napęd Becker Jasne, logiczne, zrozumiałe to właśnie te cechy oraz hasło
INSTRUKCJA UŻYTKOWNIKA. Mini DVR MD-80
 INSTRUKCJA UŻYTKOWNIKA Mini DVR MD-80 Najważniejsze cechy urządzenia: Nagrywanie video i audio Zasilanie z wbudowanego akumulatora lub ze złącza USB Przetwornik o dużej rozdzielczości 2Mpix CMOS Bardzo
INSTRUKCJA UŻYTKOWNIKA Mini DVR MD-80 Najważniejsze cechy urządzenia: Nagrywanie video i audio Zasilanie z wbudowanego akumulatora lub ze złącza USB Przetwornik o dużej rozdzielczości 2Mpix CMOS Bardzo
ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]
![ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]](/thumbs/92/108907590.jpg "ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]") ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
Szczegółowy Opis Przedmiotu Zamówienia
 Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
AP3.8.4 Adapter portu LPT
 AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
Linefollower Torpeda. Magdalena Kaczorowska
 Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
LABCONTROL EASYLAB. The art of handling air
 5.3/4/PL/1 LABCONTROL EASYLAB Moduły rozbudowy elektronicznego sterownika EASYLAB Moduł zasilania / moduł zasilania z UPS Typ Typ -USV The art of handling air TROX Austria GmbH (Sp. z o.o.) Oddział w Polsce
5.3/4/PL/1 LABCONTROL EASYLAB Moduły rozbudowy elektronicznego sterownika EASYLAB Moduł zasilania / moduł zasilania z UPS Typ Typ -USV The art of handling air TROX Austria GmbH (Sp. z o.o.) Oddział w Polsce
HART-COM - modem / przenośny komunikator HART
 CECHY Kalibracja przyrządów obiektowych wyposażonych w protokół HART Praca jako przenośny komunikator HART lub modem HART / USB Wbudowany zasilacz przetworników 2-przew. Wbudowana funkcja rezystora 250Ω
CECHY Kalibracja przyrządów obiektowych wyposażonych w protokół HART Praca jako przenośny komunikator HART lub modem HART / USB Wbudowany zasilacz przetworników 2-przew. Wbudowana funkcja rezystora 250Ω
Detektor Laserowy Dla Maszyn Budowlanych BME200 Zestaw Na Ciężki Sprzęt Budowlany
 1 V.I.P WOJCIECHOWICZ - Detektor Laserowy Dla Maszyn Budowlanych BME200 Detektor Laserowy Dla Maszyn Budowlanych BME200 Zestaw Na Ciężki Sprzęt Budowlany Instrukcja Obsługi 2 V.I.P WOJCIECHOWICZ - Detektor
1 V.I.P WOJCIECHOWICZ - Detektor Laserowy Dla Maszyn Budowlanych BME200 Detektor Laserowy Dla Maszyn Budowlanych BME200 Zestaw Na Ciężki Sprzęt Budowlany Instrukcja Obsługi 2 V.I.P WOJCIECHOWICZ - Detektor
WERSJE OBUDOWY. VG7-W RGB (3x 120 mm wentyle z adresowalnymi RGB) VG7-W Blue (3x 120 mm wentyle LED) VG7-W Red (3x 120 mm wentyle LED)
 VG7-W Blue (3x 120 mm wentyle LED) VG7-W Red (3x 120 mm wentyle LED)") WERSJE OBUDOWY VG7-W (3x 120 mm wentyle z adresowalnymi ) VG7-W Blue (3x 120 mm wentyle LED) VG7-W Red (3x 120 mm wentyle LED) VG7-W Green (3x 120 mm wentyle LED) SPÓJNA KONSTRUKCJA OBUDOWY Obudowa VG7-W
WERSJE OBUDOWY VG7-W (3x 120 mm wentyle z adresowalnymi ) VG7-W Blue (3x 120 mm wentyle LED) VG7-W Red (3x 120 mm wentyle LED) VG7-W Green (3x 120 mm wentyle LED) SPÓJNA KONSTRUKCJA OBUDOWY Obudowa VG7-W
Instrukcja obsługi AP3.8.4 Adapter portu LPT
 Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU
 P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
Wodoodporny głośnik Bluetooth MSS-200.bt
 Wodoodporny głośnik Bluetooth MSS-200.bt Szanowny Kliencie, dziękujemy za zakup wodoodpornego głośnika Bluetooth. Prosimy o przeczytanie instrukcji i przestrzeganie podanych wskazówek i porad, aby mogli
Wodoodporny głośnik Bluetooth MSS-200.bt Szanowny Kliencie, dziękujemy za zakup wodoodpornego głośnika Bluetooth. Prosimy o przeczytanie instrukcji i przestrzeganie podanych wskazówek i porad, aby mogli
Wyposażenie do pomiaru momentu
 Wyposażenie do pomiaru momentu System pomiarowy Microtest składa się z jednego z kilku przetworników momentu w połączeniu ze sterownikiem Microtest MTBU. Dostępne są następujące typy przetworników : Obrotowy
Wyposażenie do pomiaru momentu System pomiarowy Microtest składa się z jednego z kilku przetworników momentu w połączeniu ze sterownikiem Microtest MTBU. Dostępne są następujące typy przetworników : Obrotowy
DS-2410 z zasilaczem 230/12V 2A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu. Na płytce kontrolera są zamontowane:
 kontroler DS-40 w obudowie metalowej z zasilaczem 30/V A i akumulatorem 7Ah 95 DS-40 86 90 DS-40 z zasilaczem 30/V A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu 36 89 3 Na
kontroler DS-40 w obudowie metalowej z zasilaczem 30/V A i akumulatorem 7Ah 95 DS-40 86 90 DS-40 z zasilaczem 30/V A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu 36 89 3 Na
Karta katalogowa JAZZ OPLC. Modele JZ20-T10/JZ20-J-T10 i JZ20-T18/JZ20-J-T18
 Karta katalogowa JAZZ OPLC Modele JZ20-T10/JZ20-J-T10 i JZ20-T18/JZ20-J-T18 W dokumencie znajduje się specyfikacja Unitronics Jazz Micro-OPLC JZ20-T10/JZ20-J-T10 oraz JZ20-T18/JZ20-J-T18. Dodatkowe informacje
Karta katalogowa JAZZ OPLC Modele JZ20-T10/JZ20-J-T10 i JZ20-T18/JZ20-J-T18 W dokumencie znajduje się specyfikacja Unitronics Jazz Micro-OPLC JZ20-T10/JZ20-J-T10 oraz JZ20-T18/JZ20-J-T18. Dodatkowe informacje
WYŚWIETLACZ UNIWERSALNY
 WYŚWIETLACZ UNIWERSALNY WP-1 Dokumentacja techniczno ruchowa V1.0 Wrocław, luty 2012 Wyświetlacz uniwersalny WP-1 v1.0 Strona 1 z 8 Spis treści dokumentacji wyświetlacza uniwersalnego WP-1 Spis treści
WYŚWIETLACZ UNIWERSALNY WP-1 Dokumentacja techniczno ruchowa V1.0 Wrocław, luty 2012 Wyświetlacz uniwersalny WP-1 v1.0 Strona 1 z 8 Spis treści dokumentacji wyświetlacza uniwersalnego WP-1 Spis treści
Raport z budowy robota typu Linefollower Mały. Marcin Węgrzyn
 Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Terminal TR01. Terminal jest przeznaczony do montażu naściennego w czystych i suchych pomieszczeniach.
 Terminal TR01 Terminal jest m, umożliwiającym odczyt i zmianę nastaw parametrów, stanów wejść i wyjść współpracujących z nim urządzeń automatycznej regulacji wyposażonych w port komunikacyjny lub i obsługujących
Terminal TR01 Terminal jest m, umożliwiającym odczyt i zmianę nastaw parametrów, stanów wejść i wyjść współpracujących z nim urządzeń automatycznej regulacji wyposażonych w port komunikacyjny lub i obsługujących
ZL4PIC. Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
Rys. 1. Schemat ideowy karty przekaźników. AVT 5250 Karta przekaźników z interfejsem Ethernet
 Głównym elementem jest mikrokontroler PIC18F67J60, który oprócz typowych modułów sprzętowych, jak port UART czy interfejs I2C, ma wbudowany kompletny moduł kontrolera Ethernet. Schemat blokowy modułu pokazano
Głównym elementem jest mikrokontroler PIC18F67J60, który oprócz typowych modułów sprzętowych, jak port UART czy interfejs I2C, ma wbudowany kompletny moduł kontrolera Ethernet. Schemat blokowy modułu pokazano
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
Zasilacz laboratoryjny liniowy PS 1440
 Zasilacz laboratoryjny liniowy PS 1440 Instrukcja obsługi Nr produktu: 511840 Wersja 06/09 Opis działania Zasilacz laboratoryjny działa za pomocą wysoce wydajnej i stałej technologii liniowej. Wyjście
Zasilacz laboratoryjny liniowy PS 1440 Instrukcja obsługi Nr produktu: 511840 Wersja 06/09 Opis działania Zasilacz laboratoryjny działa za pomocą wysoce wydajnej i stałej technologii liniowej. Wyjście
ŁÓDKA ZANĘTOWA BAITBOAT.PL TRIMARAN
 ŁÓDKA ZANĘTOWA BAITBOAT.PL TRIMARAN Łódka zanętowa do wywózki zanęty oraz zestawów model TRIMARAN Baitboat.pl. Kadłub łódki został zaprojektowany komputerowo przy użyciu programu typu CAD następnie jako
ŁÓDKA ZANĘTOWA BAITBOAT.PL TRIMARAN Łódka zanętowa do wywózki zanęty oraz zestawów model TRIMARAN Baitboat.pl. Kadłub łódki został zaprojektowany komputerowo przy użyciu programu typu CAD następnie jako
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x
 ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP
 Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701. SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701.
 SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
CAME BX PLUS STANDARD 400kg
 Dane aktualne na dzień: 07-02-2017 10:45 Link do produktu: /came-bx-plus-standard-400kg-p-462.html CAME BX PLUS STANDARD 400kg Cena Dostępność Numer katalogowy 1 535,00 zł Dostępny CAME BX PLUS STANDARD
Dane aktualne na dzień: 07-02-2017 10:45 Link do produktu: /came-bx-plus-standard-400kg-p-462.html CAME BX PLUS STANDARD 400kg Cena Dostępność Numer katalogowy 1 535,00 zł Dostępny CAME BX PLUS STANDARD
Podręcznik użytkownika
 Podręcznik użytkownika Kabel przystosowujący USB2.0 do IDE i SATA Typ: DA-70202 I. Wstęp Gratulujemy zakupu naszego produktu! Przedstawimy nową koncepcję zapisu łączącą bezpieczeństwo z wygodą. Mamy przyjemność
Podręcznik użytkownika Kabel przystosowujący USB2.0 do IDE i SATA Typ: DA-70202 I. Wstęp Gratulujemy zakupu naszego produktu! Przedstawimy nową koncepcję zapisu łączącą bezpieczeństwo z wygodą. Mamy przyjemność
STEROWNIK MIKROPROCESOROWY PWM EC-10. Dla oświetlenia LED RGB. wersja oprogramowania: 1.7
 STEROWNIK MIKROPROCESOROWY PWM EC-10 Dla oświetlenia LED RGB wersja oprogramowania: 1.7 INSTRUKCJA OBSŁUGI INSTRUKCJA OBSŁUGI Sterownik EC-10 to zmontowana i uruchomiona płytka PCB, zawierająca poza elektroniką
STEROWNIK MIKROPROCESOROWY PWM EC-10 Dla oświetlenia LED RGB wersja oprogramowania: 1.7 INSTRUKCJA OBSŁUGI INSTRUKCJA OBSŁUGI Sterownik EC-10 to zmontowana i uruchomiona płytka PCB, zawierająca poza elektroniką
Robot Mobilny Mobot-Explorer
 Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Narzędzia budowlane NARZĘDZIA BUDOWLANE
 Narzędzia budowlane NARZĘDZIA BUDOWLANE 42 Lasery do glazury i wyznaczania pionu/poziomu DW060K Laser do układania glazury DW099P Laser 3-wiązkowy do pionu, poziomu oraz kąta prostego DW082K Laser do pionu
Narzędzia budowlane NARZĘDZIA BUDOWLANE 42 Lasery do glazury i wyznaczania pionu/poziomu DW060K Laser do układania glazury DW099P Laser 3-wiązkowy do pionu, poziomu oraz kąta prostego DW082K Laser do pionu
DS-2410 z zasilaczem 230/12V 2A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu. Na płytce kontrolera są zamontowane:
 kontroler w obudowie metalowej z zasilaczem 230/ 2A i akumulatorem 7Ah 295 286 90 z zasilaczem 230/ 2A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu 136 89 32 Na płytce kontrolera
kontroler w obudowie metalowej z zasilaczem 230/ 2A i akumulatorem 7Ah 295 286 90 z zasilaczem 230/ 2A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu 136 89 32 Na płytce kontrolera
Revolution-Tech. Neuturion LED
 Revolution-Tech Neuturion LED 1 2 Spis treści Sterownik Neuturion LED 1. Opis sterownika...4 1.1. Schemat podłączenia dla komponentów LED zasilanych od 7V do 24V DC...5 1.2. Schemat podłączenia dla komponentów
Revolution-Tech Neuturion LED 1 2 Spis treści Sterownik Neuturion LED 1. Opis sterownika...4 1.1. Schemat podłączenia dla komponentów LED zasilanych od 7V do 24V DC...5 1.2. Schemat podłączenia dla komponentów
AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION
 Krzysztof Bolek III rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION DWUPOŁOŻENIOWY REGULATOR TEMPERATURY Z APLIKACJĄ
Krzysztof Bolek III rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION DWUPOŁOŻENIOWY REGULATOR TEMPERATURY Z APLIKACJĄ
Do regulatorów dygestorium systemu EASYLAB i sys temów monitorowania FMS
 X X testregistrierung Typ Do regulatorów systemu EASYLAB i sys temów monitorowania FMS przeznaczone są do monitorowania, aktywacji funkcji i sygnalizacji stanów pracy regulatorów Optyczna i akustyczna
X X testregistrierung Typ Do regulatorów systemu EASYLAB i sys temów monitorowania FMS przeznaczone są do monitorowania, aktywacji funkcji i sygnalizacji stanów pracy regulatorów Optyczna i akustyczna
3 x 1W Lamp LED RJ 45
 PX 185 3 x 1W Lamp LED RJ 45 INSTRUKCJA OBSŁUGI R SPIS TREŚCI 1. Opis ogólny... 1. Warunki bezpieczeństwa... 1 3. Opis modelu... 4. Schemat podłączenia... 3 5. Opis przewodu RJ 45... 4 6. Dopuszczalna
PX 185 3 x 1W Lamp LED RJ 45 INSTRUKCJA OBSŁUGI R SPIS TREŚCI 1. Opis ogólny... 1. Warunki bezpieczeństwa... 1 3. Opis modelu... 4. Schemat podłączenia... 3 5. Opis przewodu RJ 45... 4 6. Dopuszczalna
ZL9AVR. Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019)
 i ZL1ETH (RTL8019)") ZL9AVR Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019) ZL9AVR to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów związanych z zastosowaniem mikrokontrolerów AVR w aplikacjach
ZL9AVR Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019) ZL9AVR to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów związanych z zastosowaniem mikrokontrolerów AVR w aplikacjach
INSTRUKCJA OBSŁUGI OBUDOWA HARRY mini
 HARRY mini HARRY mini INSTRUKCJA OBSŁUGI OBUDOWA HARRY mini ul. Jagiellońska 82 03-301 Warszawa tel.: + 48 22 597 48 48 fax. : +48 22 597 48 49 http://www.modecom.pl info@modecom.pl Dziękujemy za wybór
HARRY mini HARRY mini INSTRUKCJA OBSŁUGI OBUDOWA HARRY mini ul. Jagiellońska 82 03-301 Warszawa tel.: + 48 22 597 48 48 fax. : +48 22 597 48 49 http://www.modecom.pl info@modecom.pl Dziękujemy za wybór
Rzutnik Nr produktu
 INSTRUKCJA OBSŁUGI Rzutnik Nr produktu 000318863 Strona 1 z 5 Podręcznik DIGITUS iphone BeamJack - DA-70903 1. Opis produktu Niniejszy produkt jest produktem dostępnym jako akcesoria do iphone 4/4S, który
INSTRUKCJA OBSŁUGI Rzutnik Nr produktu 000318863 Strona 1 z 5 Podręcznik DIGITUS iphone BeamJack - DA-70903 1. Opis produktu Niniejszy produkt jest produktem dostępnym jako akcesoria do iphone 4/4S, który
Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32. Instrukcja Obsługi. SKN Chip Kacper Cyrocki Page 1
 Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32 Instrukcja Obsługi SKN Chip Kacper Cyrocki Page 1 Spis treści Wstęp... 3 Wyposażenie płytki... 4 Zasilanie... 5 Programator... 6 Diody LED...
Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32 Instrukcja Obsługi SKN Chip Kacper Cyrocki Page 1 Spis treści Wstęp... 3 Wyposażenie płytki... 4 Zasilanie... 5 Programator... 6 Diody LED...
Akumulator mobilny mah
 Akumulator mobilny 10000 mah Instrukcja obsługi 31888 I. Wprowadzenie Ten produkt to lekki, wydajny, stylowy i ekologiczny akumulator mobilny do większości urządzeń przenośnych, który można stosować zawsze
Akumulator mobilny 10000 mah Instrukcja obsługi 31888 I. Wprowadzenie Ten produkt to lekki, wydajny, stylowy i ekologiczny akumulator mobilny do większości urządzeń przenośnych, który można stosować zawsze
Modułowy programowalny przekaźnik czasowy firmy Aniro.
 Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Karta katalogowa JAZZ OPLC JZ20-R31
 Karta katalogowa JAZZ OPLC JZ20-R31 W tym dokumencie znajduje się specyfikacja Unitronics Jazz Micro-OPLC JZ20-R31. Dodatkowe informacje znajdują się na płycie instalacyjnej CD Unitronics i w bibliotece
Karta katalogowa JAZZ OPLC JZ20-R31 W tym dokumencie znajduje się specyfikacja Unitronics Jazz Micro-OPLC JZ20-R31. Dodatkowe informacje znajdują się na płycie instalacyjnej CD Unitronics i w bibliotece
Politechnika Wrocławska
 Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Przedpłatowy System Radiowy IVP (PSR IVP)
") Przedpłatowy System Radiowy IVP (PSR IVP) www.amps.com.pl 1 ver. 1.00 SPIS TREŚCI: 1. OBSŁUGA MENU ADMINISTRATORA SYSTEMU PSR IVP... 3 Menu Administratora... 3 Pozycja 0 Doładowanie... 3 Pozycja 1 Jednostki...
Przedpłatowy System Radiowy IVP (PSR IVP) www.amps.com.pl 1 ver. 1.00 SPIS TREŚCI: 1. OBSŁUGA MENU ADMINISTRATORA SYSTEMU PSR IVP... 3 Menu Administratora... 3 Pozycja 0 Doładowanie... 3 Pozycja 1 Jednostki...
Interfejs analogowy LDN-...-AN
 Batorego 18 sem@sem.pl 22 825 88 52 02-591 Warszawa www.sem.pl 22 825 84 51 Interfejs analogowy do wyświetlaczy cyfrowych LDN-...-AN zakresy pomiarowe: 0-10V; 0-20mA (4-20mA) Załącznik do instrukcji obsługi
Batorego 18 sem@sem.pl 22 825 88 52 02-591 Warszawa www.sem.pl 22 825 84 51 Interfejs analogowy do wyświetlaczy cyfrowych LDN-...-AN zakresy pomiarowe: 0-10V; 0-20mA (4-20mA) Załącznik do instrukcji obsługi
JEDNOSTKA CENTRALNA MPJ6. Instrukcja obsługi
 JEDNOSTKA CENTRALNA MPJ6 Instrukcja obsługi Spis treści 1. JEDNOSTKA CENTRALNA...3 2. WEJŚCIA I WYJŚCIA AUDIO...5 2.1. WERSJA Z 4 WEJŚCIAMI...5 2.2. WERSJA Z 8 WEJŚCIAMI...6 3. POŁĄCZENIA...7 3.1. PODŁĄCZENIE
JEDNOSTKA CENTRALNA MPJ6 Instrukcja obsługi Spis treści 1. JEDNOSTKA CENTRALNA...3 2. WEJŚCIA I WYJŚCIA AUDIO...5 2.1. WERSJA Z 4 WEJŚCIAMI...5 2.2. WERSJA Z 8 WEJŚCIAMI...6 3. POŁĄCZENIA...7 3.1. PODŁĄCZENIE
Arduino : 36 projektów dla pasjonatów elektroniki / Simon Monk. Gliwice, cop Spis treści
 Arduino : 36 projektów dla pasjonatów elektroniki / Simon Monk. Gliwice, cop. 2015. Spis treści O autorze 15 Wstęp 17 Część I. Światło i kolory ROZDZIAŁ 1. Wyświetlacz widmowy 27 Materiały 28 Schemat obwodu
Arduino : 36 projektów dla pasjonatów elektroniki / Simon Monk. Gliwice, cop. 2015. Spis treści O autorze 15 Wstęp 17 Część I. Światło i kolory ROZDZIAŁ 1. Wyświetlacz widmowy 27 Materiały 28 Schemat obwodu
INSTRUKCJA OBSŁUGI FOTOBUDKA SMOVE FBOX MINI.
 INSTRUKCJA OBSŁUGI FOTOBUDKA SMOVE FBOX MINI www.smove.pl 1. Standardowy zestaw fotobudki Zestaw zawiera: korpus fotobudki, płyta podstawy, słupek podporowy, półka pod drukarkę, obudowa na drukarkę, aparat
INSTRUKCJA OBSŁUGI FOTOBUDKA SMOVE FBOX MINI www.smove.pl 1. Standardowy zestaw fotobudki Zestaw zawiera: korpus fotobudki, płyta podstawy, słupek podporowy, półka pod drukarkę, obudowa na drukarkę, aparat
Instrukcja obsługi. Rejestrator + kamera CRI-10SD+PIR. Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia.
 Instrukcja obsługi Rejestrator + kamera CRI-10SD+PIR Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia. 1 Odbiornik zgodny jest z warunkami dyrektywy 89/336/EEC dotyczącej
Instrukcja obsługi Rejestrator + kamera CRI-10SD+PIR Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia. 1 Odbiornik zgodny jest z warunkami dyrektywy 89/336/EEC dotyczącej
MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY
 MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY 8 wejść analogowych Dotykowy wyświetlacz LCD Wewnętrzna pamięć danych 2 GB Port USB na płycie czołowej Port komunikacyjny RS-485 Wewnętrzne zasilanie akumulatorowe,
MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY 8 wejść analogowych Dotykowy wyświetlacz LCD Wewnętrzna pamięć danych 2 GB Port USB na płycie czołowej Port komunikacyjny RS-485 Wewnętrzne zasilanie akumulatorowe,
Serwonapędy AC Serie EDC, EDB, ProNet
 Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
emko Zakretarki Dynamometryczne Akumulatorowe EBS 200 EBS 500 EBS 800 EBS 1300 EBS 2600 narzędzia warsztatowe hydraulika siłowa
 emko narzędzia warsztatowe hydraulika siłowa Zakretarki Dynamometryczne Akumulatorowe EBS 200 EBS 500 EBS 800 EBS 1300 EBS 2600 Zakrętarki Akumulatorowe Klucze EBS zostały stworzone w odpowiedzi na specyficzne
emko narzędzia warsztatowe hydraulika siłowa Zakretarki Dynamometryczne Akumulatorowe EBS 200 EBS 500 EBS 800 EBS 1300 EBS 2600 Zakrętarki Akumulatorowe Klucze EBS zostały stworzone w odpowiedzi na specyficzne
Przegląd rozwiązań z oferty firmy 4D Systems
 1 Przegląd rozwiązań z oferty firmy 4D Systems Przegląd rozwiązań z oferty firmy 4D Systems 4D Systems Pty Ltd jest firmą pochodzącą z Australii, która od ponad 25 lat specjalizuje się w opracowywaniu
1 Przegląd rozwiązań z oferty firmy 4D Systems Przegląd rozwiązań z oferty firmy 4D Systems 4D Systems Pty Ltd jest firmą pochodzącą z Australii, która od ponad 25 lat specjalizuje się w opracowywaniu
AUTOMATYKA DO BRAM Cennik WAŻNY OD
 AUTOMATYKA DO BRAM Cennik WAŻNY OD 17.10.2019 Napędy do bram przesuwnych AB600 NAPĘD BRAMY PRZESUWNEJ DO 500KG Wbudowany enkoder - system wykrywania przeszkody. Napęd samoblokujący, nie wymaga stosowania
AUTOMATYKA DO BRAM Cennik WAŻNY OD 17.10.2019 Napędy do bram przesuwnych AB600 NAPĘD BRAMY PRZESUWNEJ DO 500KG Wbudowany enkoder - system wykrywania przeszkody. Napęd samoblokujący, nie wymaga stosowania
Obudowa komputerowa ATX
 Obudowa komputerowa ATX Model: AKY1BR page 1/8 Kod produktu AKY1BR Typ produktu Obudowa komputerowa ATX Format Seria Obsługiwany format płyty głównej Midi ATX Midi Tower ATX Case ATX, Micro ATX, Flex ATX,
Obudowa komputerowa ATX Model: AKY1BR page 1/8 Kod produktu AKY1BR Typ produktu Obudowa komputerowa ATX Format Seria Obsługiwany format płyty głównej Midi ATX Midi Tower ATX Case ATX, Micro ATX, Flex ATX,
Montaż komputera. ITE PC v4.0 Chapter 3 2007 Cisco Systems, Inc. All rights reserved. Cisco Public
 Montaż komputera 1 Instalacja zasilacza Kroki instalacji zasilacza: 1. Umieścić zasilacz w obudowie. 2. Dopasować otwory w zasilaczu do otworów w obudowie. 3. Przykręcić zasilacz w obudowie odpowiednimi
Montaż komputera 1 Instalacja zasilacza Kroki instalacji zasilacza: 1. Umieścić zasilacz w obudowie. 2. Dopasować otwory w zasilaczu do otworów w obudowie. 3. Przykręcić zasilacz w obudowie odpowiednimi
e-smart Home oznacza większe bezpieczeństwo i bardziej efektywne wykorzystanie energii.
 e-smart Home oznacza większe bezpieczeństwo i bardziej efektywne wykorzystanie energii. Wykorzystanie zdalnie sterowanych urządzeń i zautomatyzowanych procedur zwiększa jakość życia w pomieszczeniach mieszkalnych
e-smart Home oznacza większe bezpieczeństwo i bardziej efektywne wykorzystanie energii. Wykorzystanie zdalnie sterowanych urządzeń i zautomatyzowanych procedur zwiększa jakość życia w pomieszczeniach mieszkalnych
OSMO MOBILE. Instrukcja szybkiego uruchomienia V1.0
 OSMO MOBILE Instrukcja szybkiego uruchomienia V1.0 Osmo Mobile OSMO TM Mobile to zaawansowany technicznie gimbal, który zmienia twój smartfon w inteligentną, poruszającą się kamerę poprzez stabilizowanie
OSMO MOBILE Instrukcja szybkiego uruchomienia V1.0 Osmo Mobile OSMO TM Mobile to zaawansowany technicznie gimbal, który zmienia twój smartfon w inteligentną, poruszającą się kamerę poprzez stabilizowanie
PLD48 PIXEL DMX LED Driver
 PLD48 PIXEL DMX LED Driver Instrukcja obsługi www.modus.pl ziękujemy za zakup naszego urządzenia. Dołożyliśmy wszelkich starań, aby nasze produkty były najwyższej jakości i spełniły Państwa oczekiwania.
PLD48 PIXEL DMX LED Driver Instrukcja obsługi www.modus.pl ziękujemy za zakup naszego urządzenia. Dołożyliśmy wszelkich starań, aby nasze produkty były najwyższej jakości i spełniły Państwa oczekiwania.
Skrócona instrukcja obsługi robota Medion MD-13202 Wprowadzenie
 Skrócona instrukcja obsługi robota Medion MD-13202 Wprowadzenie Gratulujemy zakupu robota firmy Medion. Twój Inteligentny odkurzacz wyposażony jest w wiele przydatnych funkcji, które służą do czyszczenia
Skrócona instrukcja obsługi robota Medion MD-13202 Wprowadzenie Gratulujemy zakupu robota firmy Medion. Twój Inteligentny odkurzacz wyposażony jest w wiele przydatnych funkcji, które służą do czyszczenia
Obudowa komputerowa ATX
 Obudowa komputerowa ATX Model: AKY007BG page 1/9 Kod produktu AKY007BG Typ produktu Obudowa komputerowa ATX Format Seria Obsługiwany format płyty głównej Midi ATX Gamer ATX, Micro ATX, Flex ATX, Mini ITX
Obudowa komputerowa ATX Model: AKY007BG page 1/9 Kod produktu AKY007BG Typ produktu Obudowa komputerowa ATX Format Seria Obsługiwany format płyty głównej Midi ATX Gamer ATX, Micro ATX, Flex ATX, Mini ITX
PRODUCT INFORMATION INTERROLL CONVEYORCONTROL NOWY WYMIAR W BEZDOTYKOWEJ AKUMULACJI TOWARU (ZPA)
") PRODUCT INFORMATION INTERROLL CONVEYORCONTROL NOWY WYMIAR W BEZDOTYKOWEJ AKUMULACJI TOWARU (ZPA) INTERROLL CONVEYORCONTROL: STEROWANIA DLA SZYBKA INSTALACJA, ELASTYCZNA KONFIGURACJA I STOPIEŃ OCHRONY IP54
PRODUCT INFORMATION INTERROLL CONVEYORCONTROL NOWY WYMIAR W BEZDOTYKOWEJ AKUMULACJI TOWARU (ZPA) INTERROLL CONVEYORCONTROL: STEROWANIA DLA SZYBKA INSTALACJA, ELASTYCZNA KONFIGURACJA I STOPIEŃ OCHRONY IP54
UNIWERSALNY SYSTEM DO STRZELAŃ SYTUACYJNYCH typ USS- 1 6 z obrotnicami tarcz typu WP (WRÓG- PRZYJACIEL WP i WP-O) sterownikiem komputerowym i
 sterownikiem komputerowym i") UNIWERSALNY SYSTEM DO STRZELAŃ SYTUACYJNYCH typ USS- 1 6 z obrotnicami tarcz typu WP (WRÓG- PRZYJACIEL WP i WP-O) sterownikiem komputerowym i pulpitem ręcznym, wersja 04.10.03 Karta informacyjna ( w aktualizacji)
UNIWERSALNY SYSTEM DO STRZELAŃ SYTUACYJNYCH typ USS- 1 6 z obrotnicami tarcz typu WP (WRÓG- PRZYJACIEL WP i WP-O) sterownikiem komputerowym i pulpitem ręcznym, wersja 04.10.03 Karta informacyjna ( w aktualizacji)
NAZWA PRODUKTU: Skaczący dron robot Bounce Car z kamerą Wi-Fi sterowany ze smartfona Y136 Cechy produktu
 NAZWA PRODUKTU: Skaczący dron robot Bounce Car z kamerą Wi-Fi sterowany ze smartfona Y136 Cechy produktu Zdalnie sterowany dron z funkcją obracania 180 i 360 oraz skakania do 80 cm wysokości. Wyposażony
NAZWA PRODUKTU: Skaczący dron robot Bounce Car z kamerą Wi-Fi sterowany ze smartfona Y136 Cechy produktu Zdalnie sterowany dron z funkcją obracania 180 i 360 oraz skakania do 80 cm wysokości. Wyposażony
Programator procesorów rodziny AVR AVR-T910
 Programator procesorów rodziny AVR AVR-T910 Instrukcja obsługi Opis urządzenia AVR-T910 jest urządzeniem przeznaczonym do programowania mikrokontrolerów rodziny AVR firmy ATMEL. Programator podłączany
Programator procesorów rodziny AVR AVR-T910 Instrukcja obsługi Opis urządzenia AVR-T910 jest urządzeniem przeznaczonym do programowania mikrokontrolerów rodziny AVR firmy ATMEL. Programator podłączany
JAZZ OPLC JZ20-R10 i JZ20-R16
 Karta katalogowa JAZZ OPLC i W dokumencie znajduje się specyfikacja Unitronics Jazz Micro-OPLC oraz. Dodatkowe informacje znajdują się na płycie instalacyjnej CD Unitronics i w bibliotece technicznej na
Karta katalogowa JAZZ OPLC i W dokumencie znajduje się specyfikacja Unitronics Jazz Micro-OPLC oraz. Dodatkowe informacje znajdują się na płycie instalacyjnej CD Unitronics i w bibliotece technicznej na