AMEX Mini Robot Platforma mini robota edukacyjnego
|
|
|
- Ksawery Sikora
- 9 lat temu
- Przeglądów:
Transkrypt
1 AMEX Mini Robot Platforma mini robota edukacyjnego (wersja 1.0) Producent: AMEX Research Corporation Technologies Białystok, ul. Elektronowa 6 Tel.: , Fax: amexinfo@amex.pl

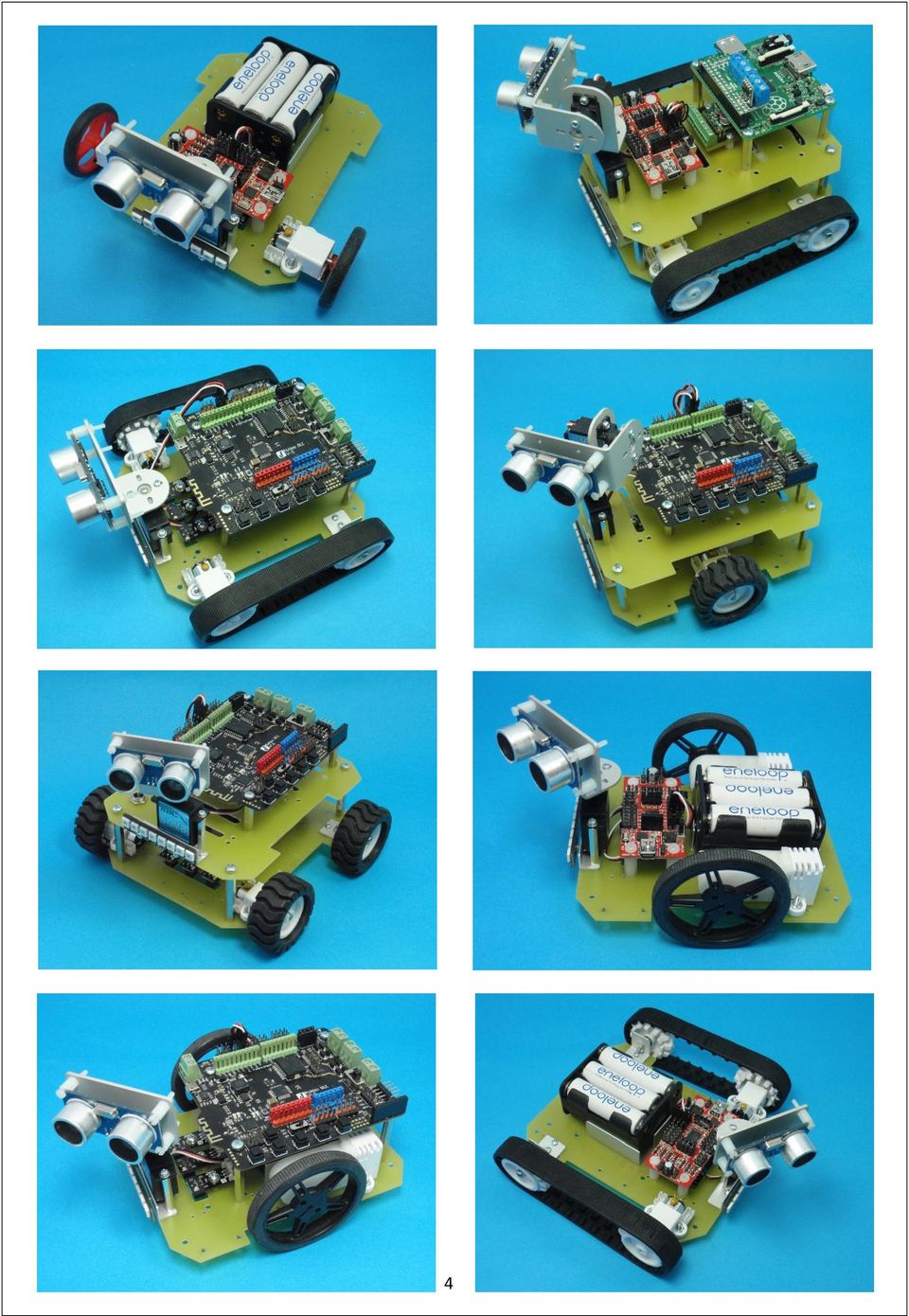
2 AMEX Mini Robot 1. Wstęp AMEX Mini Robot jest nową, unikalną platformą edukacyjną do budowy mobilnego mini robota. Konstrukcja platformy oferuje duży wybór rozwiązań w zakresie zarówno części mechanicznej jak i elektronicznej. Pozwala na tworzenie aż siedmiu różnych wersji układu jezdnego montowanych przy użyciu tej samej dolnej płyty montażowej (patrz wersje nr 1a, 1b, 2a, 2b, 3, 4, 5). Zmiana konfiguracji układu jezdnego dokonywana jest przez możliwość zastosowania różnych silników, kół oraz gąsienic oraz także zmianie geometrii ich rozmieszczenia na płycie montażowej. Powyższe rozwiązanie konstrukcyjne nie było dotychczas oferowane przez innych producentów. Platforma AMEX Mini Robot jest przeznaczona dla osób, które zamierzają nauczyć się programowania mini robota mobilnego bez konieczności własnoręcznego projektowania i czasochłonnego wykonywania całej konstrukcji mechanicznej mini robota od podstaw. Wystarczy zgodnie z instrukcją połączyć za pomocą śrub i nakrętek dostarczone w zestawie elementy mechaniczne i elektryczne oraz podłączyć do płytki mikrokontrolera (sterownika) dostarczone czujniki oraz zasilanie. Platforma jest idealnym rozwiązaniem zarówno dla indywidualnych użytkowników (początkujących i bardziej zaawansowanych hobbystów, uczniów, studentów) jak i do pracy np. w grupach uczniów w szkołach ponadpodstawowych na innowacyjnych zajęciach technicznych z zakresu elektroniki i robotyki. 2. Budowa platformy Dodatkową, unikalną cechą mini robota jest możliwość budowy mini robota przy użyciu tylko jednej płyty montażowej lub dwóch płyt montażowych (płyta dolna i płyta górna). Płyty montażowe platformy oferowane są w dwóch wersjach: z laserowo wycinanych elementów aluminiowych i poddanych obróbce anodowania oraz barwienia lub z laminatu szklano-epoksydowego (TSE). Obie technologie wykonania płyt platformy zapewniają dużą jej sztywność, trwałość i estetykę. Wszystkie elementy mechaniczne są bardzo dobrze dopasowane do siebie, co ułatwia ich montaż. Sama platforma mini robota (bez dodatkowej zabudowy) składa się z jednej lub dwóch elementów (płyt montażowych) połączonych ze sobą za pomocą czterech tulejek dystansowych oraz śrub M3. Niewielkie wymiary platformy mini robota (130 mm x 116 mm) oraz solidność i trwałość jego konstrukcji są dodatkową zaletą w prowadzeniu np. grupowych zajęć technicznych z zakresu robotyki w szkołach i różnych szkoleniach wymagających mobilności sprzętu edukacyjnego ze strony osób prowadzących zajęcia. Nasze rozwiązanie umożliwia wybór mechanicznej konfiguracji mini robota bez konieczności nabywania oddzielnych wersji modeli robotów. Wystarczy zmienić silniki oraz koła i zamontować je na tej samej płycie montażowej. Możliwość zmiany konfiguracji układu jezdnego ma duże walory edukacyjne z powodu ewentualnych modyfikacji sprzętu i oprogramowania dotyczącego sterowania silnikami. Rodzaj napędu ma bowiem wpływ na właściwości trakcyjne i dynamikę ruchu mini robota. 2

3 W przedniej części platformy (dolna i górna płyta montażowa) znajdują się otwory montażowe pod serwomechanizm układu skanującego (w zakresie 180 stopni w poziomie i w pionie) np. dla dalmierza ultradźwiękowego, kolorowej minikamery lub miniaturowego robotycznego ramienia. Układ skanujący może być w dwóch wersjach: skanowanie tylko w osi poziomej (180 stopni) oraz skanowanie w dwóch osiach (180 stopni w osi poziomej i pionowej). Na płycie dolnej, oprócz części mechanicznej (silniki, koła), czujników linii, ultradźwiękowego czujnika odległości wraz z układem skanującym sterowanym za pomocą dwóch miniaturowych serwomechanizmów oraz zasilania - można zamieścić moduł mikrontrolera (z wbudowanym sterownikiem silników) firmy DFRobot typu RoMeo BLE controller (kompatybilny z Arduino) z zintegrowaną funkcją komunikacji bezprzewodowej Bluetooth lub DAGU S4A EDU controller (kompatybilny z Arduino). Górna płyta montażowa pozwala na umieszczenie na niej tych samych modułów kontrolerów jak na dolnej płycie montażowej lub zamontowanie innych modułów (Arduino i kompatybilne) lub mikrokomputer Raspberry Pi (model A+, B+) wraz ze sterownikiem dwóch silników DC. W tej konfiguracji na dolnej płycie można zamontować moduł ładowarki akumulatorów NiMH. 2.1 Konfiguracje układu jezdnego Poszczególne wersje różnią się konfiguracją układu jezdnego (wersja 2 kołowa, 4 kołowa oraz układ z dwoma gąsienicami). Każda z tych wersji może być zamontowana na tej samej dolnej płycie montażowej platformy, która zawiera odpowiednio przystosowane miejsca i otwory montażowe do zamocowania wybranych silników i kół (patrz załącznik w tym dokumencie ilustrujący rozmieszczenie elementów i otworów montażowych na dolnej płycie mini robota). W wersji dwukołowej mogą być użyte (do wyboru) dwa różne rodzaje silników i różne koła (patrz poniżej wersja 1, wersja 2 i wersja 3) montowane na tej samej dolnej płycie montażowej. Wersje, w których stosowane są mikro silniki Pololu można opcjonalnie zamontować enkodery. Dotyczy to wersji dwukołowych (wersje: 1a, 1b, 2a, 2b), wersji czterokołowej (wersja 4) oraz gąsienicowej (wersja 5). Silniki napędowe mogą współpracować z enkoderami umieszczonymi pod każdym silnikiem. Użycie enkoderów zalecane jest dla bardziej zaawansowanych użytkowników, którzy stosując sterowanie typy PID mogą uzyskać optymalne parametry ruchu podczas skrętów w zależności np. od aktualnej prędkości mini robota i informacji uzyskanej z czujników linii lub ultradźwiękowego czujnika odległości mini robota od przeszkody. Platforma może być sterowana przy pomocy dowolnego układu mikrokontrolera ze sterownikiem silników, np. modułu ARDUINO, DAGU S4A EDU, DFRobot RoMeo BLE, RASPBERRY PI (A+, B+, Pi2) - dla których przewidziano odpowiednie rozmieszczenie otworów montażowych. 3 Producent: AMEX Research Corporation Technologies Białystok, ul. Elektronowa 6 Tel.: , Fax: amexinfo@amex.pl
, czujników linii, ultradźwiękowego czujnika odległości wraz z układem skanującym sterowanym za pomocą dwóch miniaturowych serwomechanizmów")
4 4
5 Wersja 1 Platforma dwukołowa (z kołami Pololu 42 x 19 mm) Platforma dwukołowa z możliwością wyboru miejsca montażu mikro silników i kół Pololu na dolnej płycie platformy. Wersja 1 występuje w dwóch odmianach (wersja 1a, oraz wersja 1b). Obie wersje różnią się miejscem zamocowania silników i kół. Rodzaje silników i kół (wersja 1a, wersja 1b): W obu odmianach wersji 1 zastosowano dwa miniaturowe mikro silniki Pololu HP (High Power) z przekładnią metalową (100: 1 lub 150:1 lub 210:1) oraz z kołami Pololu (2 szt.) o rozmiarze 42 x 19 mm z gumowymi oponami zapewniającymi wysoką przyczepność. Koła i silniki w wersji 1 Silnik Pololu HP Zamocowanie silnika i koła napędowego W wersji 1 silniki wraz z kołami mogą być montowane na dolnej płycie montażowej w dwóch miejscach (wersja 1a oraz wersja 1b): Wersja 1 a: Silniki i koła montowane z przodu płyty montażowej. Dla zapewnienia równowagi robota zastosowano kulkę podporową na końcu płyty montażowej platformy. 5
 o rozmiarze 42 x 19 mm z gumowymi oponami zapewniającymi wysoką przyczepność.")
6 Wersja 1 b: Silniki i koła montowane są po środku dolnej płyty montażowej. Dla zapewnienia równowagi robota przewidziano zastosowanie dwóch kulek podporowych na obu końcach dolnej płyty montażowej. 6

7 Wersja 2 Platforma dwukołowa (z kołami Pololu 40 x 7 mm) Platforma dwukołowa z możliwością wyboru miejsca montażu mikro silników i kół Pololu na dolnej płycie platformy. Wersja 2 występuje w dwóch odmianach (wersja 2a, oraz wersja 2b). Obie wersje różnią się miejscem zamocowania silników i kół. Wersja 2 różni się od wersji 1 tylko rozmiarem kół (40 x 7 mm). Silniki i ich rozmieszczenie na płycie platformy jest identyczne jak w wersji 1. Rodzaje silników i kół (wersja 2a, wersja 2b): W obu odmianach wersji 2 zastosowano dwa mikro silniki Pololu HP (High Power) z przekładnią metalową (100:1 lub 150:1 lub 210:1) oraz z kołami Pololu (2 szt.) o rozmiarze 40 x 7 mm z gumowymi oponami zapewniającymi wysoką przyczepność. Koła i silniki w wersji 2 Koła napędowe (40 x 7 mm) Zamocowanie silnika i koła napędowego Wersja 2 a: Silniki i koła montowane z przodu płyty montażowej. Dla zapewnienia równowagi robota zastosowano kulkę podporową na końcu płyty montażowej platformy. 7
: W obu odmianach wersji 2 zastosowano dwa mikro silniki Pololu HP (High Power) z przekładnią metalową (100:1 lub 150:1 lub 210:1) oraz z kołami Pololu (2")
8 Wersja 2 b: Silniki i koła montowane po środku dolnej płyty montażowej. Dla zapewnienia równowagi robota przewidziano zastosowanie dwóch kulek podporowych na obu końcach dolnej płyty montażowej. 8

9 Wersja 3 Platforma dwukołowa (z kołami Pololu 60 x 8 mm) Rodzaj silników i kół: Dwa kątowe silniki Pololu z przekładnią plastikową (120:1) i kołami Pololu o rozmiarze 60 x 8 mm z gumowymi oponami zapewniającymi wysoką przyczepność. Silniki i koła montowane po środku dolnej płyty montażowej platformy. Dla zapewnienia równowagi robota przewidziano zastosowanie dwóch kulek podporowych na obu końcach dolnej płyty montażowej. 9

10 Koła i silniki w wersji 3 Koła napędowe (60 x 8 mm) Zamocowanie silnika i koła napędowego Silnik kątowy Pololu Elementy mocujące do silnika Kulka podporowa 10

11 Rodzaj silników i kół: Wersja 4 Platforma 4 kołowa Platforma 4 kołowa (dwa koła czynne z przodu platformy oraz 2 koła bierne z tyłu platformy). Koła czynne napędzane są dwoma mikrosilnikami Pololu HP (High Power) z przekładnią metalową 100:1, 150:1 lub 210:1. 11

12 Koła i silniki w wersji 4 Silnik zamontowany na płycie Koło czynne (42 x 19 mm) Elementy montażowe kół biernych Koło bierne z założonymi oponami Elementy mocujące do silników Pololu HP 12

13 Wersja 5 Platforma z gąsienicowym układem jezdnym Platforma z gąsienicowym układem jezdnym zawiera 2 koła czynne (z przodu platformy) napędzane dwoma mikrosilnikami silnikami Pololu HP (High Power) z przekładnią metalową (100:1 lub 150:1 lub 210:1) oraz 2 koła bierne umieszczone w tylnej części platformy. Gąsienicowy zestaw napędowy zawiera dwie sztuki pasów gąsienicowych po 30 zębów każda, dwa koła napędowe oraz dwa koła pracujące luźno wraz z elementami do ich zamocowania. 13

14 Koła i silniki w wersji 5 Elementy układu gąsienicowego Zamocowanie układu gąsienicowego Widok układu gąsienicowego 14

15 2.2. Zasilanie Mini Robota We wszystkich wersjach zastosowano zasilanie mini robota z pakietu akumulatorów o napięciu 7,2 V o rozmiarze AA ( 6 x NiMH, pojemność mah) umieszczonego w pojemniku na dolnej płycie. Ładowanie akumulatorów odbywa się za pomocą zewnętrznej ładowarki sieciowej podłączanej do gniazda umieszczonego obok wyłącznika na płycie montażowej platformy. Nie ma więc konieczności wyjmowania akumulatorów z pojemnika w celu ich naładowania. Ewentualny dostęp do pojemnika jest prosty poprzez jego wysunięcie na zewnątrz. Opcjonalnie, dla wersji z zamontowaną płytą górną, pakiet akumulatorów może być ładowany z wbudowanej do mini robota modułu ładowarki typu NHC-01 (firmy AMEX), umieszczonej na dolnej płycie mini robota. Wówczas pakiet akumulatorów nie musi być wyjmowany z pojemnika w celu wymiany rozładowanych akumulatorów lub ich naładowania z zewnętrznej ładowarki. Wystarczy do ładowania podłączyć zewnętrzny, dogniazdkowy zasilacz stabilizowany (230VAC/12VDC, 1,5A) podłączany do gniazda ładowarki umieszczonego obok wyłącznika zasilania mini robota. Na zdjęciu poniżej pokazano położenie pojemnika z akumulatorami dla wersji nr 4 i 3 platformy Mini Robota. 15
, umieszczonej na dolnej płycie mini")
16 3. Specyfikacja Platforma AMEX Mini Robot oferowana jest w 7 wersjach mechanicznych, różniących się układem jezdnym. Część elektroniczna platformy (moduł mikrokontrolera, sterownika, czujniki itp.) oferowana jest oddzielnie) w celu indywidualnego skompletowania mini robota przez użytkownika. Każda wersja platformy posiada możliwość montażu modułu mikrokontrolera w wersji Arduino lub Raspberry PI (model A+, B+) oraz sterownika silników lub też kompletny sterownik firmy DFRobot typu RoMeo BLE controller lub DAGU S4A controller (kompatybilny z Arduino) wraz ze zintegrowanym sterownikiem silników. Każdy układ jezdny można dodatkowo zakupić do platformy mini robota. Specyfikacja mikro silników Pololu HP Małe, lekkie a zarazem mocne i trwałe silniki firmy Pololu z metalową przekładnią (100:1 lub 150:1 lub 210:1) wykorzystywane są w platformie AMEX Mini Robot (dla wersji 1, 2, 4, 5) jako jednostki napędowe. Silniki mogą być zasilane napięciem do 9V, moc użyteczną uzyskują powyżej 3V. Optymalne napięcie, przy którym relacja mocy do sprawności jest najkorzystniejsza, wynosi 6V. W platformie AMEX Mini Robot maksymalna wartość napięcia zasilającego z pakietu akumulatorów wynosi 7,2V (6 x 1,2V). Silnik Pololu HP 100:1 Napięcie zasilania: 3V - 9V Przełożenie: 100:1 Prędkość obrotowa bez obciążenia (6V): 320 obr/min. Prąd bez obciążenia (6V): 80 ma Prąd przy zatrzymanym wale (6V): 1600 ma (Uwaga: przy użyciu w platformie sterowników firmy Adafruit lub Dagu jest automatyczne zabezpieczenie prądowe w przypadku zatrzymania silników). Moment obrotowy: 2,2 kg cm (0,215 Nm) Wymiary korpusu: 24 x 10 x 12 mm Silnik Pololu HP 150:1 Napięcie zasilania: 3V - 9V Przełożenie: 150:1 Prędkość obrotowa bez obciążenia (6V): 200 obr/min. Prąd bez obciążenia (6V): 70 ma Prąd przy zatrzymanym wale (6V): 1600 ma (Uwaga: przy użyciu w platformie sterowników firmy Adafruit lub Dagu jest automatyczne zabezpieczenie prądowe w przypadku zatrzymania silników). Moment obrotowy: 2,9 kg cm (0,284 Nm) Wymiary korpusu: 24 x 10 x 12 mm Silnik Pololu HP 210:1 Napięcie zasilania: 3V - 9V Przełożenie: 210:1 Prędkość obrotowa bez obciążenia (6V): 140 obr/min. Prąd bez obciążenia (6V): 70 ma Prąd przy zatrzymanym wale (6V): 1600 ma (Uwaga: przy użyciu w platformie sterowników firmy Adafruit lub Dagu jest automatyczne zabezpieczenie prądowe w przypadku zatrzymania silników). Moment obrotowy: 3,6 kg cm (0,353 Nm) Wymiary korpusu: 24 x 10 x 12 mm 16
 wraz ze zintegrowanym sterownikiem silników. Każdy układ jezdny można dodatkowo zakupić do platformy mini robota.")
17 Specyfikacja silników kątowych Pololu Mały silnik z przekładnią plastikową 120:1, 120 obr/min, moment obrotowy 1,4 kg*cm (0,137 Nm). Silnik może być alternatywą dla mikro silników Pololu. Silnik Pololu DC 210:1 - kątowy Przekładania: 120:1 Napięcie zasilania: 4,5V Obroty bez obciążenia: 120 obr/min Średni pobór prądu: 80 ma Prąd szczytowy: 800 ma Moment obrotowy : 1,4 kg cm (0,137 Nm) 3.1. Część elektroniczna Moduł mikrokontrolera/sterownika UWAGA Obie płyty platformy (dolna i górna) zawierają otwory montażowe przystosowane do zainstalowania następujących wersji modułów/kontrolerów robotów: Płyta dolna: - DAGU S4A EDU Płyta górna: - ARDUINO (w wersji UNO, Leonardo itp.) wraz z wersjami kompatybilnymi - DAGU S4A EDU - DFRobot ROMEO BLE - Pololu A-Star 32U4 LV - Raspberry Pi (Modele A+, B+ oraz Pi2) wraz z dwukanałowym sterownikiem Pololu (typ DRV8835) W platformie można zastosować moduł mikrokontrolera w wersji Arduino Uno, Arduino Leonardo z rozszerzeniem o sterownik silników firmy Adafruit lub też moduł mikrokontrolera firmy Dagu (o nazwie DAGU S4A EDU controller), który jest perfekcyjnym połączeniem (na jednej małej płytce) zarówno modułu mikrokontrolera w pełni kompatybilnego z Arduino wraz ze sterownikiem silników. Alternatywnym rozwiązaniem jest zastosowanie innego kompletnego kontrolera firmy DFRobot (o nazwie Romeo BLE z komunikacją Bluetooth), który jest idealnym rozwiązaniem zarówno dla początkujących dla oraz bardziej zaawansowanych użytkowników. Platforma AMEX Mini Robot jest także przystosowana do zainstalowania mikrokomputera Raspberry Pi (modele: A+, B+ oraz Pi2). W dalszej części opisu podano specyfikację trzech typów modułów mikrokontrolerów ze zintegrowanymi sterownikami silników: kontroler DAGU S4A EDU, kontroler firmy DFRobot typu Romeo BLE oraz kontroler firmy Pololu typu A-Star 32U4 LV. Należy wspomnieć, że w platformie AMEX Mini Robot można zastosować także inne, praktycznie dowolne rodzaje modułów mikrokontrolerów i sterowników silników, których zamontowanie będzie wymagało samodzielnego wykonania ewentualnych dodatkowych otworów montażowych na górnej płycie platformy. Otwory montażowe na górnej płycie platformy są przewidziane dla modułów Arduino 17

18 oraz kontrolerów robotów Dagu S4A EDU, Romeo BLE, Pololu A-Star 32U4-LV oraz Raspberry Pi (modele: A+, B+ oraz Pi2). Dolna płyta montażowa przystosowana jest do kontrolerów robota typu DAGU S4A EDU oraz Romeo BLE. W załączniku do tego dokumentu pokazano rozmieszczenie otworów montażowych dla w/w modułów kontrolerów. Również, można zamiast typowych modułów Arduino zastosować płytkę stykową współpracującą z odpowiednimi modułami mikrokontrolerów i sterowników silników z wyprowadzeniami (pinami) wtykanymi do płytki stykowej (np. moduł mikrokontrolera firmy Pololu typu A-Star 32U4 Micro oparty na module Arduino Leonardo oraz moduł z dwukanałowym sterownikiem silników prądu stałego typu TB6612FNG firmy Toshiba. Poniżej podano widok i skrótową specyfikację wybranych kontrolerów robotów rekomendowanych do zastosowania w platformie AMEX Mini Robot. 18

19 Kontroler robota DAGU S4A EDU (wymiary płytki: 60 mm x 30 mm) Opis Kompatybilny z Arduino kontroler robota firmy Dagu. Posiada znany z wersji Uno mikrokontroler ATmega 328, który działa na częstotliwości 16 MHz. Na płytce znajduje się również sterowniki silników o parametrach 9V/2,5A. Urządzenie można programować poprzez złącze miniusb z wykorzystaniem środowiska Arduino IDE. Wszystkie piny zostały wyprowadzone na tradycyjne złącze goldpin - raster 2,54 mm, które są już wlutowane w płytkę. Specyfikacja Napięcie zasilania: od 6 V do 9 V Wbudowany regulator napięcia (5V, 2A) Mikrokontroler: Atmega 328 Taktowanie: 16 MHz Pamięć Flash: 32 kb Pamięć RAM: 2 kb SRAM Pamięć EEPROM: 1 kb Posiada wbudowany sterownik silników o wydajności 2,5 A Piny wyprowadzone na przylutowane złącza goldpin - raster 2,54 mm Złącza umożliwiają podłączenie serwomechanizmów modelarskich. Posiada cztery otwory montażowe Kontroler robota ROMEO BLE - Bluetooth (wymiary płytki: 94 mm x 80 mm) Opis Kontroler firmy DFRobot zgodny jest z Arduino Uno. Oprócz tradycyjnych cech tego typu płytki posiada moduł Bluetooth, dwukanałowy sterownik silników 32V/2A, włącznik zasilania oraz wiele dodatkowych gniazd i wyprowadzeń. Romeo BLE jest w pełni zgodny z popularnym modułem Arduino Uno. Oznacza to, że może być programowany w środowisku Arduino IDE z wykorzystaniem dostępnych bibliotek. Nakładki, tzw. Arduino Shield również będą współpracowały z modułem firmy DFRobot. Oprócz tradycyjnych cech płytek Arduino posiada układ BLE CC2540, który umożliwia komunikacje poprzez Bluetooth 4.0, dwukanałowy sterownik silników 32V/2A, wyłącznik zasilania oraz wiele dodatkowych gniazd i wyprowadzeń. Płytka zawiera mikrokontroler ATmega328, wyposażony w 14 cyfrowych wejść/wyjść z czego 6 można używać jako wyjścia PWM (np. do sterowania silnikami) i 8 jako analogowe wejścia. Układ taktowany jest sygnałem zegarowym o częstotliwości 16 MHz. Moduł posiada także: złącze micro USB, gniazdo zasilające śrubowe, przycisk RESET oraz wyprowadzenia służące do podłączenia programatora AVR. 19

20 Urządzenie posiada wiele dodatkowych cech, których brakuje tradycyjnym płytkom Arduino: włącznik zasilania - przełącznik typu ON/OFF umożliwiający proste odłączenie zasilania w dowolnym momencie, moduł BLE CC2540 firmy Texas Instruments - układ umożliwiający komunikacje i programowanie poprzez Bluetooth w zasięgu do 70 m w otwartej przestrzeni 5 przycisków typu tact-switch - do dyspozycji użytkownika, regulator napięcia - 5 V o wydajności prądowej do 2 A, sterownik silników L298 dwukanałowy - umożliwia kontrolę prędkości kierunków obrotów dwóch silników prądu stałego o poborze prądu do 2 A. Moduł zawiera kolorowe złącza, które ułatwiają identyfikację wyprowadzeń: czerwone - piny zasilające, niebieskie - piny analogowe, zielone - piny cyfrowe. Zasilanie Moduł można zasilać poprzez przewód USB oraz urządzenie zewnętrzne, np. zasilacz sieciowy, baterię czy akumulator. Przełączanie źródła zasilania odbywa się w sposób automatyczny. Zasilacz podłączany jest do gniazda śrubowego. Akumulator bądź inne źródło podłącza się do pinów złącza POWER. Programowanie Tworzenie i instalację oprogramowania umożliwia darmowe środowisko Arduino IDE. Zaimplementowany bootloader pozwala na przesłanie programu bezpośrednio poprzez przewód microusb. Złącze ISCP daje możliwość podłączenia zewnętrznego programatora AVR. Specyfikacja Napięcie zasilania: 5 V do 23 V Programowany poprzez złącze microusb W pełni kompatybilny z Arduino Uno Mikrokontroler: ATmega328 Maksymalna częstotliwość zegara: 16 MHz Pamięć SRAM: 2 kb Pamięć Flash: 32 kb (5kB zarezerwowane dla bootloadera) Pamięć EEPROM: 1 kb Porty I/O: 20 Wyjścia PWM: 6- piny 3, 5, 6, 9, 10, 11 Ilość wejść analogowych: 8 (kanały przetwornika A/C) Interfejsy szeregowe: UART, SPI, I2C Zewnętrzne przerwania Konektor: gniazdo microusb (przewód microusb do nabycia osobno) Przylutowane złącze ISP Przyciski do dyspozycji użytkownika: 5 Wbudowany układ BLE CC2540 wraz z anteną: - Umożliwia komunikacje Bluetooth Pozwala na bezprzewodowe programowanie Arduino - Wspiera Bluetooth HiD i IBeacons - Obsługuje komendy AT Sterownik silników: dwukanałowy L298, 2A Regulator napięcia z wyjściem 5 V (2A) oraz 3,3 V Wymiary płytki: 94 x 80 mm W celu uruchomienia modułu, należy połączyć układ z komputerem za pomocą przewodu microusb oraz wybrać w środowisku Arduino IDE płytkę Arduino Uno. Szczegółowy opis produktu można znaleźć w przewodniku użytkownika 20

21 Kontroler robota POLOLU A-Star 32U4 LV (wymiary płytki: 65 mm x 56 mm) Opis Moduł A-Star 32U4 Robot Controller LV jest kompletnym sterownikiem opartym o mikrokontroler ATmega32U4, który posiada 32 KB pamięci programu, 2,5 KB pamięci RAM oraz wbudowane funkcje interfejsu USB. Oznacza to, że może być programowany w środowisku Arduino IDE z wykorzystaniem dostępnych bibliotek. Kontroler jest dedykowany dla małych robotów, posiadając niezbędne funkcje sprzętowe takie jak m.in. sterownik dwóch silników o wydajności prądowej 1,8A na kanał. Poza tym, na płytce kontrolera zamieszczono wydajny impulsowy regulator napięcia i przesuwnik poziomów logicznych, co pozwala na współpracę z zewnętrznym mikrokomputerem Raspberry Pi (modele: A+, B+ oraz Pi2). Raspberry Pi (Model A+) Raspberry Pi (Model B+) 21 Płytka kontrolera posiada dodatkowe złącze do umieszczenia go nad płytką mikrokomputera Raspberry Pi. Na rysunku obok pokazano kontroler Pololu A-Star 32U4 LV wraz z mikrokomputerem Raspberry Pi (Model B+). Czujniki i serwomechanizmy można podłączać do 3-pinowych złącz (typu goldpin) umieszczonych na płytce sterownika. AMEX Mini Robot jest przystosowany do zamontowania tego kontrolera zarówno jako samodzielnego modułu lub w kombinacji z Raspberry Pi. Bardziej szczegółowe informacje dotyczące kontrolera Pololu A-Star 32U4 Robot Controller LV oraz mikrokomputera Raspberry Pi można znaleźć na stronach internetowych producentów.
22 3.2. Czujniki śledzenia linii Czujnik linii może wykrywać czarną lub białą linię. Wykrycie linii sygnalizowane jest sygnałem cyfrowym (na poziomie TTL). W platformie AMEX Mini Robot zastosowano 3 czujniki linii umieszczone na dolnej płycie montażowej (patrz rysunek poniżej) Enkodery Silniki napędowe mogą opcjonalnie współpracować z enkoderami umieszczonymi pod każdym silnikiem (dotyczy to wersji platformy z mikro silnikami Pololu HP, tj. wersji nr 1, 2, 4, 5). Użycie enkoderów zalecane jest dla bardziej zaawansowanych użytkowników, którzy stosując sterowanie typu PID mogą uzyskać optymalne parametry ruchu podczas skrętów w zależności np. od aktualnej prędkości mini robota i informacji uzyskanej z czujników linii lub ultradźwiękowego czujnika odległości mini robota od przeszkody. Widok enkodera z kablami połączeniowymi pokazano na rysunku poniżej. 22
23 3.4. Układ skanujący z czujnikiem ultradźwiękowym W przedniej części platformy (dolna i górna płyta montażowa) znajdują się otwory montażowe pod serwomechanizm układu skanującego (w zakresie 180 stopni w poziomie i w pionie) np. dla dalmierza ultradźwiękowego, kolorowej minikamery lub miniaturowego robotycznego ramienia. Układ skanujący może być w dwóch wersjach: skanowanie tylko w osi poziomej (180 stopni) oraz skanowanie w dwóch osiach (180 stopni w osi poziomej i pionowej). Obie wersje układu skanującego wraz z czujnikiem ultradźwiękowym i serwomechanizmami pokazano na rysunku poniżej. Widok układu skanującego zamontowanego na platformie AMEX Mini Robot pokazano w załączonej galerii zdjęć. UWAGA: Zestaw platformy AMEX Mini Robot (Kit) wymaga samodzielnego montażu. Na życzenie (za dodatkową opłatą) dostarczamy zmontowaną i skonfigurowaną wcześniej przez użytkownika wersję platformy zawierającą część mechaniczną i elektroniczną. Firma AMEX planuje opracowanie i publikowanie na swojej stronie internetowej programów demonstracyjnych. 23
24 ZAŁĄCZNIK Uwaga: Otwory zaznaczone na poniższych rysunkach kolorem czerwonym służą do połączenia obu płyt za pomocą 4 elementów dystansowych i 4 śrub M3. Elementy jezdne (silniki wraz z kołami), czujniki linii oraz (opcjonalnie) - moduł ładowarki akumulatorów, montowane są na dolnej płycie. Mini robot może być wykonany również przy wykorzystaniu tylko płyty dolnej. Górna płyta zwiększa możliwości zamontowania innych modułów. Płyta dolna Płyta górna 24
25 Wersje układu jezdnego rozmieszczenie elementów i otworów montażowych na dolnej płycie mini robota UWAGA: Otwory zaznaczone kolorem czerwonym dotyczą tylko elementów dla danej wersji układu jezdnego. Wersja 1a Wersja 1b Wersja 2a Wersja 2b 25
26 Wersja 3 Wersja 4 Wersja 5 26
27 Położenie innych elementów mechanicznych i modułów elektronicznych Płyta dolna: Elementy mocujące pojemnik z akumulatorami oraz serwo układu skanującego Serwo układu skanującego Płyta górna: Wyłącznik i gniazdo zasilacza/ładowarki NiMH Serwo układu skanującego 27
28 Płyta dolna: Czujniki linii 28
29 Płyta dolna: Moduł kontrolera robota DAGU S4A EDU (umieszczony nad czujnikami linii) Płyta górna: Moduł kontrolera robota DAGU S4A EDU oraz (opcjonalnie) moduł wyświetlacza, akcelerometru, żyroskopu i joystika 29
30 Płyta górna: Moduł ARDUINO Płyta dolna: Moduł kontrolera robota ROMEO BLE 30
31 Płyta górna: Moduł kontrolera robota ROMEO BLE Płyta górna: Moduł mikrokomputera RASPBERRY PI (model A+) oraz moduł kontrolera robota DAGU S4A EDU 31
32 Płyta dolna: Moduł ładowarki akumulatorów NiMH (umieszczony nad czujnikami linii) 32
33 AMEX Mini Robot Schemat połączeń kontrolera DAGU S4A EDU i zewnętrznej ładowarki 33
34 AMEX Mini Robot Schemat połączeń modułu ładowarki NHC-01 (wbudowanej do robota), zewnętrznego zasilacza i elementów towarzyszących 34
35 Moduł ładowarki pakietów akumulatorów NiMH OPIS Moduł NHC-01 jest miniaturowym modułem procesorowej ładowarki pakietów akumulatorów NiMH (2-8 ogniw typu AA oraz AAA) o pojemności od 1000 mah do 2800 mah. Przeznaczony jest do wbudowania (OEM) w urządzeniach przenośnych i mini robotach mobilnych zasilanych akumulatorami. Moduł posiada funkcję kontroli temperatury ładowanych ogniw oraz możliwość ustawiania różnych wartości prądów ładowania i liczby ogniw w pakiecie. Ze względu na niewielkie wymiary modułu ładowarki (60 mm x 30 mm x 17 mm), idealnie nadaje się on do zamontowania w urządzeniach, które normalnie wymagają częstego wyjmowania akumulatorów z pojemnika i umieszczania ich w zewnętrznej ładowarce, co bywa dość kłopotliwe. Możliwość wbudowania ładowarki do różnych urządzeń jest unikalnym, bardzo praktycznym i jednocześnie ekonomicznym rozwiązaniem dla wielu użytkowników i konstruktorów z zakresu elektroniki i robotyki. Do zasilania modułu ładowarki wymagany jest jedynie zewnętrzny, sieciowy zasilacz impulsowy (230VAC/9..18VDC, 1.5A). Ładowarka wykorzystuje kilka algorytmów detekcji stanu naładowania akumulatora, co zapewnia wysoką niezawodność i gwarantuje pełne naładowanie pakietów akumulatorów bez niebezpieczeństwa ich przegrzania i przeładowania. Konfiguracja ładowarki jest bardzo prosta i polega jedynie na ustawieniu prądu ładowania i ilości ogniw w pakiecie. Konfigurowanie odbywa się przy pomocy odpowiedniego ustawienia zworek. Sygnalizacja aktualnego stanu pracy odbywa się przy pomocy diody LED. Dodatkowym elementem jest możliwość podłączenia termistora do pomiaru temperatury pakietu akumulatorów, który zapewnia najbardziej precyzyjne wykrycie pełnego naładowania ogniw przy najwyższym prądzie ładowania (500 ma dla ogniw AAA oraz 1000 ma dla ogniw AA). Podstawowe parametry ładowarki NHC-01: prądy ładowania: 125 ma, 250 ma, 500 ma, 1000 ma ładowanie pakietu szeregowo połączonych ogniw NiMH typu AA i AAA o pojemności mah liczba ogniw w pakiecie: 2, 3, 4, 5, 6, 7, 8 (2,4V - 9,6V) napięcie zasilania VDC (np. zewnętrzny zasilacz sieciowy: 230VAC/9..18VDC, 1.5A) niewielkie rozmiary (moduł o wymiarach: 60 mm x 30 mm x 17 mm) Temperatura otoczenia: 0 C do +40 C Wilgotność względna otoczenia: 20% do 85% Więcej informacji można znaleźć w instrukcji obsługi ładowarki NHC-01: 35 Producent: AMEX Research Corporation Technologies Białystok, ul. Elektronowa 6 Tel.: , Fax: amexinfo@amex.pl
36 GALERIA ZDJĘĆ Wersja 1a 36
37 Wersja 1b 37
38 Wersja 2a, 2b 38
39 Wersja 3 39
40 Wersja 4 40
41 Wersja 5 41
42 Producent: AMEX Research Corporation Technologies Białystok, ul. Elektronowa 6 Tel.: , Fax: amexinfo@amex.pl 42
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
AMRobot. Platforma mini robota edukacyjnego
 AMRobot Platforma mini robota edukacyjnego Producent: AMEX Research Corporation Technologies 15-066 Białystok, ul. Modlińska 1 Tel.: 602723295, Fax: 856530703 e-mail: amexinfo@amex.pl www.amex.pl Platforma
AMRobot Platforma mini robota edukacyjnego Producent: AMEX Research Corporation Technologies 15-066 Białystok, ul. Modlińska 1 Tel.: 602723295, Fax: 856530703 e-mail: amexinfo@amex.pl www.amex.pl Platforma
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
Spis treści. Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
KAmduino UNO. Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO
 Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO to płytka rozwojowa o funkcjonalności i wymiarach typowych dla Arduino UNO. Dzięki wbudowanemu mikrokontrolerowi ATmega328P i
Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO to płytka rozwojowa o funkcjonalności i wymiarach typowych dla Arduino UNO. Dzięki wbudowanemu mikrokontrolerowi ATmega328P i
KAmduino UNO. Rev Źródło:
 KAmduino UNO Rev. 20170811113756 Źródło: http://wiki.kamami.pl/index.php?title=kamduino_uno Spis treści Podstawowe cechy i parametry... 2 Wyposażenie standardowe... 3 Schemat elektryczny... 4 Mikrokontroler
KAmduino UNO Rev. 20170811113756 Źródło: http://wiki.kamami.pl/index.php?title=kamduino_uno Spis treści Podstawowe cechy i parametry... 2 Wyposażenie standardowe... 3 Schemat elektryczny... 4 Mikrokontroler
Typ: NHC-01 Moduł ładowarki pakietów akumulatorów NiMH OPIS
 Typ: NHC-01 Moduł ładowarki pakietów akumulatorów NiMH OPIS Moduł NHC-01 jest miniaturowym modułem procesorowej ładowarki pakietów akumulatorów NiMH (2-8 ogniw typu AA oraz AAA) o pojemności od 1000 mah
Typ: NHC-01 Moduł ładowarki pakietów akumulatorów NiMH OPIS Moduł NHC-01 jest miniaturowym modułem procesorowej ładowarki pakietów akumulatorów NiMH (2-8 ogniw typu AA oraz AAA) o pojemności od 1000 mah
Zestaw Startowy EvB. Więcej informacji na stronie: http://and-tech.pl/zestaw-evb-5-1/
 Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR
 UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR zestaw UNO R3 Starter Kit zawiera: UNO R3 (Compatible Arduino) x1szt. płytka stykowa 830 pól x1szt. zestaw 75 sztuk kabli do płytek stykowych
UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR zestaw UNO R3 Starter Kit zawiera: UNO R3 (Compatible Arduino) x1szt. płytka stykowa 830 pól x1szt. zestaw 75 sztuk kabli do płytek stykowych
- WALKER Czteronożny robot kroczący
 - WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
- WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]
![ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]](/thumbs/92/108907590.jpg "ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]") ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
ZL9AVR. Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019)
 i ZL1ETH (RTL8019)") ZL9AVR Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019) ZL9AVR to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów związanych z zastosowaniem mikrokontrolerów AVR w aplikacjach
ZL9AVR Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019) ZL9AVR to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów związanych z zastosowaniem mikrokontrolerów AVR w aplikacjach
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x
 ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
ZL10PLD. Moduł dippld z układem XC3S200
 ZL10PLD Moduł dippld z układem XC3S200 Moduły dippld opracowano z myślą o ułatwieniu powszechnego stosowania układów FPGA z rodziny Spartan 3 przez konstruktorów, którzy nie mogą lub nie chcą inwestować
ZL10PLD Moduł dippld z układem XC3S200 Moduły dippld opracowano z myślą o ułatwieniu powszechnego stosowania układów FPGA z rodziny Spartan 3 przez konstruktorów, którzy nie mogą lub nie chcą inwestować
ZL8AVR. Płyta bazowa dla modułów dipavr
 ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
LITEcompLPC1114. Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Sponsorzy:
 Sponsorzy:") LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
AVREVB1. Zestaw uruchomieniowy dla mikrokontrolerów AVR. Zestawy uruchomieniowe www.evboards.eu
 AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
ADuCino 360. Zestaw uruchomieniowy dla mikrokontrolerów ADuCM360/361
 Zestaw uruchomieniowy dla mikrokontrolerów ADuCM360/361 ADuCino 360 Zestaw ADuCino jest tanim zestawem uruchomieniowym dla mikrokontrolerów ADuCM360 i ADuCM361 firmy Analog Devices mechanicznie kompatybilnym
Zestaw uruchomieniowy dla mikrokontrolerów ADuCM360/361 ADuCino 360 Zestaw ADuCino jest tanim zestawem uruchomieniowym dla mikrokontrolerów ADuCM360 i ADuCM361 firmy Analog Devices mechanicznie kompatybilnym
mbot Ranger Robot edukacyjny 3-w-1
 mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Raport z budowy robota typu Linefollower Mały. Marcin Węgrzyn
 Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
KA-NUCLEO-F411CE. Płytka rozwojowa z mikrokontrolerem STM32F411CE
 Płytka rozwojowa z mikrokontrolerem STM32F411CE to płytka rozwojowa o rozstawie złącz typowym dla Arduino UNO, bazująca na mikrokontrolerze STM32F411CE. Dzięki wbudowanemu programatorowi zgodnemu z ST-Link/v2-1,
Płytka rozwojowa z mikrokontrolerem STM32F411CE to płytka rozwojowa o rozstawie złącz typowym dla Arduino UNO, bazująca na mikrokontrolerze STM32F411CE. Dzięki wbudowanemu programatorowi zgodnemu z ST-Link/v2-1,
Zgrana para - NerO i CleO
 1 Zgrana para NerO i CleO Zgrana para - NerO i CleO Wyświetlacze inteligentne CleO, opracowane przez firmę Bridgetek (FTDI) są ciekawą propozycją dla elektroników, którzy zamierzają wyposażyć swoją aplikację
1 Zgrana para NerO i CleO Zgrana para - NerO i CleO Wyświetlacze inteligentne CleO, opracowane przez firmę Bridgetek (FTDI) są ciekawą propozycją dla elektroników, którzy zamierzają wyposażyć swoją aplikację
MOBOT-EXPLORER Wersja v2 Platforma robota mobilnego dla celów rozbudowy, edukacyjnych i uczelnianych
 Instrukcja obsługi MOBOT-EXPLORER Wersja v2 Platforma robota mobilnego dla celów rozbudowy, edukacyjnych i uczelnianych P.P.H. WObit E.K.J. Ober s.c. Dęborzyce 16, 62-045 Pniewy tel. 48 61 22 27 422, fax.
Instrukcja obsługi MOBOT-EXPLORER Wersja v2 Platforma robota mobilnego dla celów rozbudowy, edukacyjnych i uczelnianych P.P.H. WObit E.K.J. Ober s.c. Dęborzyce 16, 62-045 Pniewy tel. 48 61 22 27 422, fax.
Rys. 1. Schemat ideowy karty przekaźników. AVT 5250 Karta przekaźników z interfejsem Ethernet
 Głównym elementem jest mikrokontroler PIC18F67J60, który oprócz typowych modułów sprzętowych, jak port UART czy interfejs I2C, ma wbudowany kompletny moduł kontrolera Ethernet. Schemat blokowy modułu pokazano
Głównym elementem jest mikrokontroler PIC18F67J60, który oprócz typowych modułów sprzętowych, jak port UART czy interfejs I2C, ma wbudowany kompletny moduł kontrolera Ethernet. Schemat blokowy modułu pokazano
ZASTOSOWANIE PLATFORM CYFROWYCH ARDUINO I RASPBERRY PI W NAUCZANIU STEROWANIA OBIEKTEM PNEUMATYCZNYM
 ZASTOSOWANIE PLATFORM CYFROWYCH ARDUINO I RASPBERRY PI W NAUCZANIU STEROWANIA OBIEKTEM PNEUMATYCZNYM Adam MUC, Lech MURAWSKI, Grzegorz GESELLA, Adam SZELEZIŃSKI, Arkadiusz SZARMACH CEL Wykorzystanie popularnych
ZASTOSOWANIE PLATFORM CYFROWYCH ARDUINO I RASPBERRY PI W NAUCZANIU STEROWANIA OBIEKTEM PNEUMATYCZNYM Adam MUC, Lech MURAWSKI, Grzegorz GESELLA, Adam SZELEZIŃSKI, Arkadiusz SZARMACH CEL Wykorzystanie popularnych
STM32 Butterfly. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Politechnika Białostocka
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Kod przedmiotu: TS1C 622 388 Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Elektronika samochodowa Temat: Programowanie
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Kod przedmiotu: TS1C 622 388 Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Elektronika samochodowa Temat: Programowanie
ZL4PIC. Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP
 Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
Programator ZL2PRG jest uniwersalnym programatorem ISP dla mikrokontrolerów, o budowie zbliżonej do STK200/300 (produkowany przez firmę Kanda).
.") ZL2PRG Programator ISP dla mikrokontrolerów AVR firmy Atmel Programator ZL2PRG jest uniwersalnym programatorem ISP dla mikrokontrolerów, o budowie zbliżonej do STK200/300 (produkowany przez firmę Kanda).
ZL2PRG Programator ISP dla mikrokontrolerów AVR firmy Atmel Programator ZL2PRG jest uniwersalnym programatorem ISP dla mikrokontrolerów, o budowie zbliżonej do STK200/300 (produkowany przez firmę Kanda).
Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32. Instrukcja Obsługi. SKN Chip Kacper Cyrocki Page 1
 Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32 Instrukcja Obsługi SKN Chip Kacper Cyrocki Page 1 Spis treści Wstęp... 3 Wyposażenie płytki... 4 Zasilanie... 5 Programator... 6 Diody LED...
Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32 Instrukcja Obsługi SKN Chip Kacper Cyrocki Page 1 Spis treści Wstęp... 3 Wyposażenie płytki... 4 Zasilanie... 5 Programator... 6 Diody LED...
MOBOT RoboSnake. Moduł wieloczłonowego robota
 MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
LITEcomp. Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19
 LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
MozhePoyedzye. Robot klasy MiniSumo. Konrad Bednarek Michał Rataj
 MozhePoyedzye Robot klasy MiniSumo Konrad Bednarek Michał Rataj Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja 2 2.1 Mechanika.............................
MozhePoyedzye Robot klasy MiniSumo Konrad Bednarek Michał Rataj Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja 2 2.1 Mechanika.............................
E-TRONIX Sterownik Uniwersalny SU 1.2
 Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Zasilacz laboratoryjny liniowy PS 1440
 Zasilacz laboratoryjny liniowy PS 1440 Instrukcja obsługi Nr produktu: 511840 Wersja 06/09 Opis działania Zasilacz laboratoryjny działa za pomocą wysoce wydajnej i stałej technologii liniowej. Wyjście
Zasilacz laboratoryjny liniowy PS 1440 Instrukcja obsługi Nr produktu: 511840 Wersja 06/09 Opis działania Zasilacz laboratoryjny działa za pomocą wysoce wydajnej i stałej technologii liniowej. Wyjście
W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM
 Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Detektor Laserowy Dla Maszyn Budowlanych BME200 Zestaw Na Ciężki Sprzęt Budowlany
 1 V.I.P WOJCIECHOWICZ - Detektor Laserowy Dla Maszyn Budowlanych BME200 Detektor Laserowy Dla Maszyn Budowlanych BME200 Zestaw Na Ciężki Sprzęt Budowlany Instrukcja Obsługi 2 V.I.P WOJCIECHOWICZ - Detektor
1 V.I.P WOJCIECHOWICZ - Detektor Laserowy Dla Maszyn Budowlanych BME200 Detektor Laserowy Dla Maszyn Budowlanych BME200 Zestaw Na Ciężki Sprzęt Budowlany Instrukcja Obsługi 2 V.I.P WOJCIECHOWICZ - Detektor
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
HART-COM - modem / przenośny komunikator HART
 CECHY Kalibracja przyrządów obiektowych wyposażonych w protokół HART Praca jako przenośny komunikator HART lub modem HART / USB Wbudowany zasilacz przetworników 2-przew. Wbudowana funkcja rezystora 250Ω
CECHY Kalibracja przyrządów obiektowych wyposażonych w protokół HART Praca jako przenośny komunikator HART lub modem HART / USB Wbudowany zasilacz przetworników 2-przew. Wbudowana funkcja rezystora 250Ω
SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701. SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701.
 SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
5 / 6 TX (A) RX (A) RX (B) TX (B) COM DTM CKM DT1 CK1 DT2 CK2 COM H L H L R B M S
 RX (A) RX (B) TX (B) COM DTM CKM DT1 CK1 DT2 CK2 COM H L H L R B M S") KONWERTER ŚWIATŁOWODOWY DANYCH INT-FI int-fi_pl 05/09 Konwerter INT-FI umożliwia konwersję i transmisję danych przy pomocy kabli światłowodowych. Jest dedykowany do współpracy z magistralami komunikacyjnymi
KONWERTER ŚWIATŁOWODOWY DANYCH INT-FI int-fi_pl 05/09 Konwerter INT-FI umożliwia konwersję i transmisję danych przy pomocy kabli światłowodowych. Jest dedykowany do współpracy z magistralami komunikacyjnymi
Język C. Wykład 9: Mikrokontrolery cz.2. Łukasz Gaweł Chemia C pokój 307
 Język C Wykład 9: Mikrokontrolery cz.2 Łukasz Gaweł Chemia C pokój 307 lukasz.gawel@pg.edu.pl Pierwszy program- powtórka Częstotliwość zegara procesora μc (należy sprawdzić z kartą techniczną μc) Dodaje
Język C Wykład 9: Mikrokontrolery cz.2 Łukasz Gaweł Chemia C pokój 307 lukasz.gawel@pg.edu.pl Pierwszy program- powtórka Częstotliwość zegara procesora μc (należy sprawdzić z kartą techniczną μc) Dodaje
o Instalacja środowiska programistycznego (18) o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)
 o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)") O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
Linefollower Torpeda. Magdalena Kaczorowska
 Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
ZL29ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
Raport z budowy robota Krzysio
 Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Modem radiowy MR10-GATEWAY-S
 Modem radiowy MR10-GATEWAY-S - instrukcja obsługi - (dokumentacja techniczno-ruchowa) Spis treści 1. Wstęp 2. Budowa modemu 3. Parametry techniczne 4. Parametry konfigurowalne 5. Antena 6. Dioda sygnalizacyjna
Modem radiowy MR10-GATEWAY-S - instrukcja obsługi - (dokumentacja techniczno-ruchowa) Spis treści 1. Wstęp 2. Budowa modemu 3. Parametry techniczne 4. Parametry konfigurowalne 5. Antena 6. Dioda sygnalizacyjna
MultiTool instrukcja użytkownika 2010 SFAR
 MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
Przegląd rozwiązań z oferty firmy 4D Systems
 1 Przegląd rozwiązań z oferty firmy 4D Systems Przegląd rozwiązań z oferty firmy 4D Systems 4D Systems Pty Ltd jest firmą pochodzącą z Australii, która od ponad 25 lat specjalizuje się w opracowywaniu
1 Przegląd rozwiązań z oferty firmy 4D Systems Przegląd rozwiązań z oferty firmy 4D Systems 4D Systems Pty Ltd jest firmą pochodzącą z Australii, która od ponad 25 lat specjalizuje się w opracowywaniu
Płytka uruchomieniowa XM32
 2015 Płytka uruchomieniowa XM32 Instrukcja obsługi - www.barion-st.com 2015-08-07 2 SPIS TREŚCI 1. WSTĘP... 3 1.1 Co to jest XM32?... 3 1.2 Budowa oraz parametry techniczne... 3 1.3 Schemat połączeń...
2015 Płytka uruchomieniowa XM32 Instrukcja obsługi - www.barion-st.com 2015-08-07 2 SPIS TREŚCI 1. WSTĘP... 3 1.1 Co to jest XM32?... 3 1.2 Budowa oraz parametry techniczne... 3 1.3 Schemat połączeń...
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC") 1 ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami mikrokontrolerów PIC. Jest on przystosowany do współpracy z mikrokontrolerami
1 ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami mikrokontrolerów PIC. Jest on przystosowany do współpracy z mikrokontrolerami
FREEboard. Zestaw startowy z mikrokontrolerem z rodziny Freescale KINETIS L (Cortex-M0+) i sensorami MEMS 7 DoF
 i sensorami MEMS 7 DoF") FREEboard Zestaw startowy z mikrokontrolerem z rodziny Freescale KINETIS L (Cortex-M0+) i sensorami MEMS 7 DoF FREEboard to bogato wyposażona platforma startowa wyposażona w mikrokontroler z rodziny Freescale
FREEboard Zestaw startowy z mikrokontrolerem z rodziny Freescale KINETIS L (Cortex-M0+) i sensorami MEMS 7 DoF FREEboard to bogato wyposażona platforma startowa wyposażona w mikrokontroler z rodziny Freescale
AVR DRAGON. INSTRUKCJA OBSŁUGI (wersja 1.0)
") AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
Elektronika samochodowa (Kod: TS1C )
") Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu Elektronika samochodowa (Kod: TS1C 622 388) Temat: Programowanie mikrokontrolerów
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu Elektronika samochodowa (Kod: TS1C 622 388) Temat: Programowanie mikrokontrolerów
LABCONTROL EASYLAB. The art of handling air
 5.3/4/PL/1 LABCONTROL EASYLAB Moduły rozbudowy elektronicznego sterownika EASYLAB Moduł zasilania / moduł zasilania z UPS Typ Typ -USV The art of handling air TROX Austria GmbH (Sp. z o.o.) Oddział w Polsce
5.3/4/PL/1 LABCONTROL EASYLAB Moduły rozbudowy elektronicznego sterownika EASYLAB Moduł zasilania / moduł zasilania z UPS Typ Typ -USV The art of handling air TROX Austria GmbH (Sp. z o.o.) Oddział w Polsce
DS-2410 z zasilaczem 230/12V 2A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu. Na płytce kontrolera są zamontowane:
 kontroler DS-40 w obudowie metalowej z zasilaczem 30/V A i akumulatorem 7Ah 95 DS-40 86 90 DS-40 z zasilaczem 30/V A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu 36 89 3 Na
kontroler DS-40 w obudowie metalowej z zasilaczem 30/V A i akumulatorem 7Ah 95 DS-40 86 90 DS-40 z zasilaczem 30/V A - bez zasilania rezerwowego do zamontowania w obudowie tripodu, szlabanu 36 89 3 Na
Instrukcja obsługi programatora AVR Prog USB v2
 Instrukcja obsługi programatora AVR Prog USB v2 Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2 Strona 1 Zawartość 1. Instalacja... 3 2. Instalacja sterowników w trybie HID.... 3 3. Programowanie
Instrukcja obsługi programatora AVR Prog USB v2 Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2 Strona 1 Zawartość 1. Instalacja... 3 2. Instalacja sterowników w trybie HID.... 3 3. Programowanie
AP3.8.4 Adapter portu LPT
 AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
Programator procesorów rodziny AVR AVR-T910
 Programator procesorów rodziny AVR AVR-T910 Instrukcja obsługi Opis urządzenia AVR-T910 jest urządzeniem przeznaczonym do programowania mikrokontrolerów rodziny AVR firmy ATMEL. Programator podłączany
Programator procesorów rodziny AVR AVR-T910 Instrukcja obsługi Opis urządzenia AVR-T910 jest urządzeniem przeznaczonym do programowania mikrokontrolerów rodziny AVR firmy ATMEL. Programator podłączany
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
INSTRU KCJA UŻYTKOWNIKA
 INSTRU KCJA UŻYTKOWNIKA 1 Spis treści 1. Elementy zestawu... 3 2. Instalacja baterii... 5 a. W kontrolerze... 5 b. W joysticku... 5 3. Podłączenie urządzeń... 6 4. Podłączenie kontrolera do komputera.
INSTRU KCJA UŻYTKOWNIKA 1 Spis treści 1. Elementy zestawu... 3 2. Instalacja baterii... 5 a. W kontrolerze... 5 b. W joysticku... 5 3. Podłączenie urządzeń... 6 4. Podłączenie kontrolera do komputera.
ZL4PIC. Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ISP ADAPTER. Instrukcja obsługi rev.1.1. Copyright 2009 SIBIT
 Instrukcja obsługi rev.1.1 Spis treści 1.Wprowadzenie... 3 2. Rozmieszczenie elementów...4 3. Opis wyprowadzeń złącza ISP...6 4. Zasilanie adaptera...7 5. Wybór źródła taktowania...8 6. Wybór programowanego
Instrukcja obsługi rev.1.1 Spis treści 1.Wprowadzenie... 3 2. Rozmieszczenie elementów...4 3. Opis wyprowadzeń złącza ISP...6 4. Zasilanie adaptera...7 5. Wybór źródła taktowania...8 6. Wybór programowanego
Instrukcja obsługi. SQCA244 instrukcja obsługi
 Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. PPH WObit
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. PPH WObit
ZL19PRG. Programator USB dla układów PLD firmy Altera
 ZL19PRG Programator USB dla układów PLD firmy Altera Nowoczesny programator i konfigurator układów PLD produkowanych przez firmę Altera, w pełni zgodny ze standardem USB Blaster, dzięki czemu współpracuje
ZL19PRG Programator USB dla układów PLD firmy Altera Nowoczesny programator i konfigurator układów PLD produkowanych przez firmę Altera, w pełni zgodny ze standardem USB Blaster, dzięki czemu współpracuje
Szczegółowy Opis Przedmiotu Zamówienia- Część I
 Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
INSTRUKCJA MONTAŻU / OBSŁUGI
 INSTRUKCJA MONTAŻU / OBSŁUGI ZWORY ELEKTROMAGNETYCZNE WPUSZCZANE EL-120, EL-140 EL-350, EL-350S EL-600SL, EL-600TSL, EL-600DSL EL-800SL, EL-800BSL EL-800TSL, EL-800DSL EL-1200SL, EL-1200BSL EL-1200TSL,
INSTRUKCJA MONTAŻU / OBSŁUGI ZWORY ELEKTROMAGNETYCZNE WPUSZCZANE EL-120, EL-140 EL-350, EL-350S EL-600SL, EL-600TSL, EL-600DSL EL-800SL, EL-800BSL EL-800TSL, EL-800DSL EL-1200SL, EL-1200BSL EL-1200TSL,
5 / 6 TX (A) RX (A) RX (B) TX (B) COM DTM CKM DT1 CK1 DT2 CK2 COM H L H L R B M S
 RX (A) RX (B) TX (B) COM DTM CKM DT1 CK1 DT2 CK2 COM H L H L R B M S") KONWETE ŚWIATŁOWODOWY DANYCH INT-FI int-fi_pl 10/09 Konwerter INT-FI umożliwia konwersję i transmisję danych przy pomocy kabli światłowodowych. Jest dedykowany do współpracy z magistralami komunikacyjnymi
KONWETE ŚWIATŁOWODOWY DANYCH INT-FI int-fi_pl 10/09 Konwerter INT-FI umożliwia konwersję i transmisję danych przy pomocy kabli światłowodowych. Jest dedykowany do współpracy z magistralami komunikacyjnymi
Płytka uruchomieniowa XM64
 2015 Płytka uruchomieniowa XM64 - Instrukcja obsługi www.barion-st.com 2015-05-12 2 SPIS TREŚCI 1. WSTĘP... 3 1.1 Co to jest XM64?... 3 1.2 Budowa oraz parametry techniczne... 3 1.3 Schemat połączeń...
2015 Płytka uruchomieniowa XM64 - Instrukcja obsługi www.barion-st.com 2015-05-12 2 SPIS TREŚCI 1. WSTĘP... 3 1.1 Co to jest XM64?... 3 1.2 Budowa oraz parametry techniczne... 3 1.3 Schemat połączeń...
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
Szczegółowy Opis Przedmiotu Zamówienia
 Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
Instrukcja obsługi programatora AVR Prog USB v2
 Instrukcja obsługi programatora AVR Prog USB v2 Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2 www.and-tech.pl Strona 1 Zawartość Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2
Instrukcja obsługi programatora AVR Prog USB v2 Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2 www.and-tech.pl Strona 1 Zawartość Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2
Moduł prototypowy.. Leon Instruments. wersja 1.0
 wersja 1.0 Moduł extrino XL umożliwia prototypowanie urządzeń z wykorzystaniem procesora ATmega128A3U-AU AU oraz naukę programowania nowoczesnych mikrokontrolerów z serii XMEGA firmy Atmel. Moduł znajdzie
wersja 1.0 Moduł extrino XL umożliwia prototypowanie urządzeń z wykorzystaniem procesora ATmega128A3U-AU AU oraz naukę programowania nowoczesnych mikrokontrolerów z serii XMEGA firmy Atmel. Moduł znajdzie
AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION
 Krzysztof Bolek III rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION DWUPOŁOŻENIOWY REGULATOR TEMPERATURY Z APLIKACJĄ
Krzysztof Bolek III rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION DWUPOŁOŻENIOWY REGULATOR TEMPERATURY Z APLIKACJĄ
INSTRUKCJA OBSŁUGI Przekaźnik na USB Nr katalogowy RELx-USB-00
 INSTRUKCJA OBSŁUGI Przekaźnik na USB Nr katalogowy RELx-USB-00 data publikacji kwiecień 2010 Strona 2 z 8 SPIS TREŚCI 1. Charakterystyka ogólna... 3 1.1 Sygnalizacja... 3 1.2 Obudowa... 3 2. Zastosowanie...
INSTRUKCJA OBSŁUGI Przekaźnik na USB Nr katalogowy RELx-USB-00 data publikacji kwiecień 2010 Strona 2 z 8 SPIS TREŚCI 1. Charakterystyka ogólna... 3 1.1 Sygnalizacja... 3 1.2 Obudowa... 3 2. Zastosowanie...
Instrukcja użytkownika JAZZ OPLC JZ20-R31. Poradnik montażu Micro OPLC
 Instrukcja użytkownika JAZZ OPLC JZ20-R31 Poradnik montażu Micro OPLC 16 wejść cyfrowych, 2 wejścia analogowe/cyfrowe, 2 wejścia analogowe, 11 wyjść przekaźnikowych Przed użyciem produktu użytkownik musi
Instrukcja użytkownika JAZZ OPLC JZ20-R31 Poradnik montażu Micro OPLC 16 wejść cyfrowych, 2 wejścia analogowe/cyfrowe, 2 wejścia analogowe, 11 wyjść przekaźnikowych Przed użyciem produktu użytkownik musi
EPPL , 15-31, 20-31
 Najnowsza seria zaawansowanych technologicznie zasilaczy klasy On-Line (VFI), przeznaczonych do współpracy z urządzeniami zasilanymi z jednofazowej sieci energetycznej ~230V: serwery, sieci komputerowe
Najnowsza seria zaawansowanych technologicznie zasilaczy klasy On-Line (VFI), przeznaczonych do współpracy z urządzeniami zasilanymi z jednofazowej sieci energetycznej ~230V: serwery, sieci komputerowe
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
KATEDRA SYSTEMÓW MULTIMEDIALNYCH SEMINARIUM MULTIMEDIALNE SYSTEMY MEDYCZNE
 KATEDRA SYSTEMÓW MULTIMEDIALNYCH SEMINARIUM MULTIMEDIALNE SYSTEMY MEDYCZNE Seminarium nr 1: Wprowadzenie do platformy Intel Galileo Opracowanie: mgr inż. Janusz Cichowski 1. WPROWADZENIE Celem ćwiczenia
KATEDRA SYSTEMÓW MULTIMEDIALNYCH SEMINARIUM MULTIMEDIALNE SYSTEMY MEDYCZNE Seminarium nr 1: Wprowadzenie do platformy Intel Galileo Opracowanie: mgr inż. Janusz Cichowski 1. WPROWADZENIE Celem ćwiczenia
Arduino dla początkujących. Kolejny krok Autor: Simon Monk. Spis treści
 Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
Montaż komputera. ITE PC v4.0 Chapter 3 2007 Cisco Systems, Inc. All rights reserved. Cisco Public
 Montaż komputera 1 Instalacja zasilacza Kroki instalacji zasilacza: 1. Umieścić zasilacz w obudowie. 2. Dopasować otwory w zasilaczu do otworów w obudowie. 3. Przykręcić zasilacz w obudowie odpowiednimi
Montaż komputera 1 Instalacja zasilacza Kroki instalacji zasilacza: 1. Umieścić zasilacz w obudowie. 2. Dopasować otwory w zasilaczu do otworów w obudowie. 3. Przykręcić zasilacz w obudowie odpowiednimi
Koncentrator komunikacyjny Ex-mBEL_COM
 Koncentrator komunikacyjny Ex-mBEL_COM Koncentrator komunikacyjny Ex-mBEL_COM Przeznaczenie Sterownik Ex-mBEL_COM jest koncentratorem dla urządzeń z rodziny Ex-mBEL lub innych urządzeń cyfrowych (zabezpieczeń,
Koncentrator komunikacyjny Ex-mBEL_COM Koncentrator komunikacyjny Ex-mBEL_COM Przeznaczenie Sterownik Ex-mBEL_COM jest koncentratorem dla urządzeń z rodziny Ex-mBEL lub innych urządzeń cyfrowych (zabezpieczeń,
ML H z czujnikiem
 ZWORY ELEKTROMAGNETYCZNE ELEKTROMAGNESY www.elektrozaczepy.lap.pl 1 Zwora Elektromagnetyczna wpuszczana ML-302H ML- 302-05H z czujnikiem Zwory Elektromagnetyczne - Elektromagnesy w odróżnieniu od elektrozaczepów
ZWORY ELEKTROMAGNETYCZNE ELEKTROMAGNESY www.elektrozaczepy.lap.pl 1 Zwora Elektromagnetyczna wpuszczana ML-302H ML- 302-05H z czujnikiem Zwory Elektromagnetyczne - Elektromagnesy w odróżnieniu od elektrozaczepów
Jednostka Centralna MICROS+
 Jednostka Centralna MICROS+ TDS10012 Jednostka centralna Micros+ wyposażona jest w 2 porty magistrali AUTOBUS. Konfiguracja odbywa się przez port USB lub Ethernet. Każdy port magistralowy pozwala obsłużyć
Jednostka Centralna MICROS+ TDS10012 Jednostka centralna Micros+ wyposażona jest w 2 porty magistrali AUTOBUS. Konfiguracja odbywa się przez port USB lub Ethernet. Każdy port magistralowy pozwala obsłużyć
Gate. www.getproxi.com
 Gate www.getproxi.com Informacje o module rb-to2s2 Przeznaczenie Moduł służy do sterowania bramami wjazdowymi i garażowymi przy pomocy urządzenia mobilnego. Współpracuje ze sterownikami bram oferowanych
Gate www.getproxi.com Informacje o module rb-to2s2 Przeznaczenie Moduł służy do sterowania bramami wjazdowymi i garażowymi przy pomocy urządzenia mobilnego. Współpracuje ze sterownikami bram oferowanych
ZWORY ELEKTROMAGNETYCZNE - INSTRUKCJA OBSŁUGI
 ZWORY ELEKTROMAGNETYCZNE INSTRUKCJA OBSŁUGI Spis treści: 1. Zamki elektromagnetyczne podwieszane 1.1. Parametry techniczne 1.2. Wymiary zamków pojedynczych do drzwi jednoskrzydłowych 1.3. Wymiary zamków
ZWORY ELEKTROMAGNETYCZNE INSTRUKCJA OBSŁUGI Spis treści: 1. Zamki elektromagnetyczne podwieszane 1.1. Parametry techniczne 1.2. Wymiary zamków pojedynczych do drzwi jednoskrzydłowych 1.3. Wymiary zamków
ZASILACZE AWARYJNEUPS
 AWARYJNE ZASILACZE Uninterruptible Power Supply Dbamy o stabilną pracę www.east.pl ZASILACZE AWARYJNE TECHNOLOGIA Zasilacze awaryjne marki EAST wyposażone zostały w zaawansowane technologie zapewniające
AWARYJNE ZASILACZE Uninterruptible Power Supply Dbamy o stabilną pracę www.east.pl ZASILACZE AWARYJNE TECHNOLOGIA Zasilacze awaryjne marki EAST wyposażone zostały w zaawansowane technologie zapewniające
INSTRUKCJA OBSŁUGI. kontakt@msx-elektronika.pl
 INSTRUKCJA OBSŁUGI Programator AVR USBasp jest w pełni zgodny z programatorem USBasp, stworzonym przez Thomasa Fischla. Za jego pomocą możemy programować mikrokontrolery z rodziny AVR firmy ATMEL poprzez
INSTRUKCJA OBSŁUGI Programator AVR USBasp jest w pełni zgodny z programatorem USBasp, stworzonym przez Thomasa Fischla. Za jego pomocą możemy programować mikrokontrolery z rodziny AVR firmy ATMEL poprzez
Instrukcja obsługi programatora AVR Prog USB v2
 Instrukcja obsługi programatora AVR Prog USB v2 Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2 www.and-tech.pl Strona 1 Zawartość Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2
Instrukcja obsługi programatora AVR Prog USB v2 Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2 www.and-tech.pl Strona 1 Zawartość Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2
ORVALDI 1000, 1500, 2000 LED USB
 INSTRUKCJA UŻYTKOWNIKA ORVALDI 1000, 1500, 2000 LED ORVALDI Power Protection Sp. z o.o. Centrum Logistyki i Serwisu ul. Wrocławska 33d; 55-090 Długołęka k/wrocławia serwis@orvaldi.pl www.orvaldi.com.pl
INSTRUKCJA UŻYTKOWNIKA ORVALDI 1000, 1500, 2000 LED ORVALDI Power Protection Sp. z o.o. Centrum Logistyki i Serwisu ul. Wrocławska 33d; 55-090 Długołęka k/wrocławia serwis@orvaldi.pl www.orvaldi.com.pl
Instrukcja obsługi programatora AVR Prog USB v2
 Instrukcja obsługi programatora AVR Prog USB v2 Strona 1 Spis treści 1. Instalacja...3 2. Instalacja sterowników w trybie HID....3 3. Programowanie w trybie HID...4 4. Instalacja w trybie COM....5 5. Programowanie
Instrukcja obsługi programatora AVR Prog USB v2 Strona 1 Spis treści 1. Instalacja...3 2. Instalacja sterowników w trybie HID....3 3. Programowanie w trybie HID...4 4. Instalacja w trybie COM....5 5. Programowanie
Robot Mobilny Mobot-Explorer
 Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Terminal TR01. Terminal jest przeznaczony do montażu naściennego w czystych i suchych pomieszczeniach.
 Terminal TR01 Terminal jest m, umożliwiającym odczyt i zmianę nastaw parametrów, stanów wejść i wyjść współpracujących z nim urządzeń automatycznej regulacji wyposażonych w port komunikacyjny lub i obsługujących
Terminal TR01 Terminal jest m, umożliwiającym odczyt i zmianę nastaw parametrów, stanów wejść i wyjść współpracujących z nim urządzeń automatycznej regulacji wyposażonych w port komunikacyjny lub i obsługujących
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT,
 Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. P.P.H.
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. P.P.H.
MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY
 MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY 8 wejść analogowych Dotykowy wyświetlacz LCD Wewnętrzna pamięć danych 2 GB Port USB na płycie czołowej Port komunikacyjny RS-485 Wewnętrzne zasilanie akumulatorowe,
MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY 8 wejść analogowych Dotykowy wyświetlacz LCD Wewnętrzna pamięć danych 2 GB Port USB na płycie czołowej Port komunikacyjny RS-485 Wewnętrzne zasilanie akumulatorowe,