ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU
|
|
|
- Alojzy Stefaniak
- 7 lat temu
- Przeglądów:
Transkrypt

1 P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016

2 Cel pracy: CEL I ZAKRES PRACY Celem pracy było wykonanie projektu robota mobilnego zbierającego informacje o pomieszczeniu. Zakres pracy: Przegląd literatury w zakresie tematu pracy. Badanie charakterystyk wybranych czujników odległościowych. Opracowanie mechaniki pojazdu oraz jej wykonanie. Opracowanie układu sterowania oraz jego wykonanie. Opracowanie programu współpracującego z robotem na komputerze PC. Wykonanie testów pojazdu oraz układu zbierania danych.
3 PRZEGLĄD LITERATURY Metody poruszania się robotów w przestrzeni 2D, Reprezentacja otoczenia, Sensory odległościowe, Czujniki orientujące robota w przestrzeni, Transfer danych między robotem, a komputerem.
4 METODY PORUSZANIA SIĘ ROBOTÓW W PRZESTRZENI Metody globalne: Mapy dróg Dekompozycja komórkowa Metoda pól potencjałowych Metody lokalne: Metody rastrowe Algorytm BUG VFH Vector Field Histogram
5 REPREZENTACJA OTOCZENIA Reprezentacja metryczna: Mapy rastrowe Mapy wektorowe Reprezentacja topologiczna Mapy semantyczne Reprezentacja hybrydowa: Metryczno- topologiczna Topologiczno-metryczna Metryczno-metryczna Rys. 1. Mapa rastrowa 2D [1] Rys. 2. Mapa wektorowa [1] Rys. 3. Mapa semantyczna [1] Rys. 4. Mapa metryczno-topologiczna [1]
![SENSORY ODLEGŁOŚCIOWE Czujniki ultradźwiękowe Czujniki optyczne Dalmierz laserowy Skaner laserowy Kamera Kinect Rys. 5. Ultradźwiękowy czujnik odległości HC-SR04 [17] Rys. 6.](/docs-images/57/40965877/images/6-0.png "Czujnik odległości Sharp GP2Y0A21YK0F [17] Rys. 9. Kamera Kinect firmy Microsoft [29] Rys. 8. Skaner laserowy RPLidar 360 degree Laser Scanner 2D [28] Rys. 7.")
6 SENSORY ODLEGŁOŚCIOWE Czujniki ultradźwiękowe Czujniki optyczne Dalmierz laserowy Skaner laserowy Kamera Kinect Rys. 5. Ultradźwiękowy czujnik odległości HC-SR04 [17] Rys. 6. Czujnik odległości Sharp GP2Y0A21YK0F [17] Rys. 9. Kamera Kinect firmy Microsoft [29] Rys. 8. Skaner laserowy RPLidar 360 degree Laser Scanner 2D [28] Rys. 7. Dalmierz laserowy Bosch PLR 50 [26]

7 CZUJNIKI ORIENTUJĄCE ROBOTA W PRZESTRZENI Optyczny czujnik przemieszczenia Cyfrowy magnetometr 3-osiowy Akcelerometr GPS Global Positioning System Orientacja odometryczna Rys. 11. Cyfrowy magnetometr 3-osiowy Xtrinsic MAG3110 [17] Rys. 10. Sensor optyczny z myszki Tracer Scorpion [19] Rys. 12. Akcelerometr cyfrowy 3-osiowy ADXL345 [17] Rys. 13. Moduł odbiornika GPS-GMM-R1 [17]
![TRANSFER DANYCH MIĘDZY ROBOTEM, A KOMPUTEREM Bluetooth Wi-Fi ZigBee GSM-GMRS Rys. 14. Moduł Bluetooth: a) HC-05 [17] Rys. 15.](/docs-images/57/40965877/images/8-0.png "Moduł Wi-Fi ESP-12E ESP8266 Black [17] Rys. 16. Moduł radiowy z protokołem ZigBee Core2530 [17] Rys. 17.")
8 TRANSFER DANYCH MIĘDZY ROBOTEM, A KOMPUTEREM Bluetooth Wi-Fi ZigBee GSM-GMRS Rys. 14. Moduł Bluetooth: a) HC-05 [17] Rys. 15. Moduł Wi-Fi ESP-12E ESP8266 Black [17] Rys. 16. Moduł radiowy z protokołem ZigBee Core2530 [17] Rys. 17. Moduł GSM/GPRS LoNet 800L [17]

9 BADANIE CHARAKTERYSTYK CZUJNIKÓW ODLEGŁOŚCIOWYCH Czujniki: Czujnik ultradźwiękowy HC-SR04 Czujnik odbiciowy Sharp GP2Y0A21YK0F Badane parametry: Dokładność pomiaru Powtarzalność pomiaru Rys. 18. Ultradźwiękowy czujnik odległości HC-SR04 [17] Rys. 19. Analogowy czujnik odległości Sharp GP2Y0A21YK0F [17]

10 BADANIE CHARAKTERYSTYK CZUJNIKÓW ODLEGŁOŚCIOWYCH Rys. 20. Podłączenie czujników do Arduino UNO
11 BADANIE CHARAKTERYSTYK CZUJNIKÓW ODLEGŁOŚCIOWYCH Dokładność wskazań
12 BADANIE CHARAKTERYSTYK CZUJNIKÓW ODLEGŁOŚCIOWYCH Powtarzalność wskazań
13 CO TO JEST MECHATRONIKA I DO JAKIEJ DZIEDZINY MOŻNA ZALICZYĆ MÓJ PROJEKT?
 Prędkość: 0,22 s/60 Moment: 13,5 kg*cm (1,32 Nm) Prędkość:")
14 OPRACOWANIE MECHANIKI POJAZDU NAPĘD ROBOTA - SERWOMECHANIZMY Napięcie zasilania Sygnał sterujący Wymiary Masa Dodatkowe informacje Parametry dla 4,8 V Parametry dla 6,0 V Od 4,8 do 6,0 V 50 Hz / 1-2 ms 40,5 x 20 x 38 mm 60 g Metalowe tryby Brak ogranicznika ruchu Potencjometr do regulacji punktu środkowego Moment: 12,0 kg*cm (1,17 Nm) Prędkość: 0,22 s/60 Moment: 13,5 kg*cm (1,32 Nm) Prędkość: 0,20 s/60 Rys. 21. Serwo PowerHD AR-1201MG [17]
 98 g 42 x 19 mm (z wałem 34 mm) Rys. 22. Silnik krokowy Epson EM-463")
15 OPRACOWANIE MECHANIKI POJAZDU NAPĘD WIEŻY SILNIK KROKOWY Napięcie znamionowe 7,4 V Rozdzielczość 200 kroków/obr (1,8 ) Wyprowadzenia Masa Wymiary Bipolarny (4 przewody) 98 g 42 x 19 mm (z wałem 34 mm) Rys. 22. Silnik krokowy Epson EM-463
16 OPRACOWANIE MECHANIKI POJAZDU BADANIE ODLEGŁOŚCI CZUJNIKI ULTRADŹWIĘKOWE Napięcie zasilania Pobór prądu Zakres pomiarowy Częstotliwość pracy Masa Wymiary 5 V 15 ma cm 40 khz 8 g 45 x 20 x 15 mm Rys. 23. Ultradźwiękowy czujnik odległości HC-SR04 [17]

17 OPRACOWANIE MECHANIKI POJAZDU ORIENTACJA W PRZESTRZENI OPTYCZNY CZUJNIK PRZEMIESZCZENIA Napięcie zasilania Złącze Czułość czujnika Sensor 5 V USB 800 DPI Optyczny Rys. 24. Sensor optyczny z myszki Tracer Scorpion [19,24]
 X, Y, Z Zakres pomiarowy +/- 1000 µt Czułość 0,1 µt Wymiary 26 x 24 mm Rys. 25.")
18 OPRACOWANIE MECHANIKI POJAZDU ORIENTACJA W PRZESTRZENI MAGNETYCZNY CZUJNIK USTAWIENIA KĄTOWEGO Napięcie zasilania Interfejs komunikacyjny Osie pomiarowe 3,3 V I2C (fast mode 400 khz) X, Y, Z Zakres pomiarowy +/ µt Czułość 0,1 µt Wymiary 26 x 24 mm Rys. 25. Cyfrowy magnetometr 3-osiowy MAG3110 [17]

19 Rys. 26. Konstrukcja robota mobilnego wykonana w programie Autodesk Inventor 2014

20

21 Rys. 27. Wirtualna konstrukcja robota mobilnego Rys. 28. Rzeczywista konstrukcja robota mobilnego

22 OPRACOWANIE UKŁADU STEROWANIA
23 OPRACOWANIE UKŁADU STEROWANIA

24 OPRACOWANIE UKŁADU STEROWANIA Rys. 29. Płytki wykonane metodą termotransferu

25 PROGRAM STERUJĄCY NA KAMDUINO UNO Program wykonany w dedykowanym Środowisku Arduino
26 PROGRAM WSPÓŁPRACUJĄCY Z ROBOTEM WYKONANY NA KOMPUTERZE PC Program wykonany w środowisku Visual Studio 2012 w języku C#.

27 PROGRAM WSPÓŁPRACUJĄCY Z ROBOTEM WYKONANY NA KOMPUTERZE PC

28 PROGRAM WSPÓŁPRACUJĄCY Z ROBOTEM WYKONANY NA KOMPUTERZE PC
29 ALGORYTMY PRACY AUTONOMICZNEJ
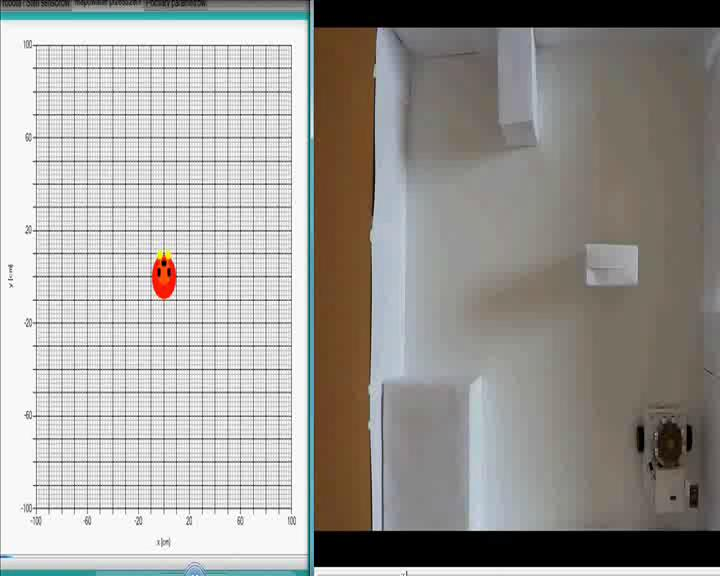
 rysowany obszar, b) pomiar zgrubny, c)")
30 a) b) c) d) Rys. 1. Tworzenie mapy otoczenia: a) rysowany obszar, b) pomiar zgrubny, c) pomiar precyzyjny, d) plik tekstowy z zapisanymi pomiarami

31
32

33
34 PODSUMOWANIE Budowa elementów robota wymagała dużo pracy, głównie ze względu na konieczność tworzenia go we wszystkich dziedzinach jednocześnie. Wykonany pojazd został dobrze przystosowany do zadań jakie miał wykonywać, co widać na tworzonych przez niego mapach obszaru. Zrealizowany projekt pokazuje idealnie synergię pomiędzy poszczególnymi dziedzinami nauki. Projekt można rozwinąć w każdej z omawianych wcześniej dziedzin w celu polepszenia właściwości tworzonych reprezentacji otoczenia. Mechanika napędy, koła, optymalizacja korpusu robota Elektronika sensory, optymalizacja układu sterowania Informatyka złożone algorytmy, równania ruchu, systemy decyzyjne
35 DZIĘKUJE ZA UWAGĘ
PROJEKT ROBOTA MOBILNEGO ZBIERAJĄCEGO INFORMACJE O POMIESZCZENIU
 P O L I T E C H N I K A P O Z N A Ń S K A Wydział Budowy Maszyn i Zarządzania INSTYTUT TECHNOLOGII MECHANICZNEJ POLITECHNIKI POZNAŃSKIEJ Zakład urządzeń mechatronicznych PROJEKT ROBOTA MOBILNEGO ZBIERAJĄCEGO
P O L I T E C H N I K A P O Z N A Ń S K A Wydział Budowy Maszyn i Zarządzania INSTYTUT TECHNOLOGII MECHANICZNEJ POLITECHNIKI POZNAŃSKIEJ Zakład urządzeń mechatronicznych PROJEKT ROBOTA MOBILNEGO ZBIERAJĄCEGO
Zastosowanie silników krokowych jako napęd robota mobilnego
 Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury. Czujniki stacjonarne.
 Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT. Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014
 Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
PRACA DYPLOMOWA MAGISTERSKA
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania PRACA DYPLOMOWA MAGISTERSKA Konstrukcja autonomicznego robota mobilnego Małgorzata Bartoszewicz Promotor: prof. dr hab. inż. A. Milecki Zakres
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania PRACA DYPLOMOWA MAGISTERSKA Konstrukcja autonomicznego robota mobilnego Małgorzata Bartoszewicz Promotor: prof. dr hab. inż. A. Milecki Zakres
projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania;
 PRZYGOTOWAŁ: KIEROWNIK PRACY: MICHAŁ ŁABOWSKI dr inż. ZDZISŁAW ROCHALA projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania; dokładny pomiar wysokości
PRZYGOTOWAŁ: KIEROWNIK PRACY: MICHAŁ ŁABOWSKI dr inż. ZDZISŁAW ROCHALA projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania; dokładny pomiar wysokości
- WALKER Czteronożny robot kroczący
 - WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
- WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO
 Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Stanowisko do badania współczynnika tarcia
 Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Mechatronika i inteligentne systemy produkcyjne. Sensory (czujniki)
") Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM
 Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Raport z budowy robota typu Linefollower Mały. Marcin Węgrzyn
 Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP
 Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Automatyka i Robotyka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów.
 Kierunek Nazwisko dyplomanta Specyfikacja tematu Specjalne kwalifikacje osoby realizującej pracę dr inż. Dariusz Marchewka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów. Maksymilian
Kierunek Nazwisko dyplomanta Specyfikacja tematu Specjalne kwalifikacje osoby realizującej pracę dr inż. Dariusz Marchewka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów. Maksymilian
Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA. Autor: Daniel Słowik
 Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA Autor: Daniel Słowik Promotor: Dr inż. Daniel Kopiec Wrocław 016 Plan prezentacji Założenia i cel
Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA Autor: Daniel Słowik Promotor: Dr inż. Daniel Kopiec Wrocław 016 Plan prezentacji Założenia i cel
Spis treści. Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
Komputerowe Systemy Pomiarowe. 10 października 2014 Wojciech Kucewicz 1
 Komputerowe Systemy Pomiarowe 10 października 2014 Wojciech Kucewicz 1 Komputerowe Systemy Pomiarowe Prof. dr hab. inż. Wojciech Kucewicz mgr inż. Piotr Dorosz Katedra Elektroniki AGH e-mail: kucewicz@agh.edu.pl
Komputerowe Systemy Pomiarowe 10 października 2014 Wojciech Kucewicz 1 Komputerowe Systemy Pomiarowe Prof. dr hab. inż. Wojciech Kucewicz mgr inż. Piotr Dorosz Katedra Elektroniki AGH e-mail: kucewicz@agh.edu.pl
OSTER 2 Sterownik programowalny z wbudowanym modemem GPRS
 MIKOM s.c. Grzegorz Idzikowski, Jacek Moczulewski ul. Tyrmanda 40/12 54-608 Wrocław tel: 501291951 mikom@pnet.pl OSTER 2 Sterownik programowalny z wbudowanym modemem GPRS Urządzenie OSTER jest połączeniem
MIKOM s.c. Grzegorz Idzikowski, Jacek Moczulewski ul. Tyrmanda 40/12 54-608 Wrocław tel: 501291951 mikom@pnet.pl OSTER 2 Sterownik programowalny z wbudowanym modemem GPRS Urządzenie OSTER jest połączeniem
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
Silnik prądu stałego. Sterowanie silnika prądu stałego
 Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Instrukcja Obsługi. Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH
 Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Regulator napięcia transformatora
 Regulator napięcia transformatora Zastosowanie Regulator RNTr-1 Wykorzystywany jest do stabilizacji napięcia na stacjach elektroenergetycznych lub końcach energetycznych linii przesyłowych. Przeznaczony
Regulator napięcia transformatora Zastosowanie Regulator RNTr-1 Wykorzystywany jest do stabilizacji napięcia na stacjach elektroenergetycznych lub końcach energetycznych linii przesyłowych. Przeznaczony
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Czujnik ultradźwiękowy serii BKS+/BKS
 Produkty Czujniki i enkodery Czujniki ultradźwiękowe serii BKS+/BKS Czujnik widelcowy Rozdzielczość od 0.1mm do 0.025 mm Zakres detekcji 8mm ( ±4mm) - 35 mm (±17,5 mm) Wyjście analogowe, Push-Pull, IO-Link
Produkty Czujniki i enkodery Czujniki ultradźwiękowe serii BKS+/BKS Czujnik widelcowy Rozdzielczość od 0.1mm do 0.025 mm Zakres detekcji 8mm ( ±4mm) - 35 mm (±17,5 mm) Wyjście analogowe, Push-Pull, IO-Link
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych
 ZP/UR/46/203 Zał. nr a do siwz Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych Przedmiot zamówienia obejmuje następujące elementy: L.p. Nazwa Ilość. Zestawienie komputera
ZP/UR/46/203 Zał. nr a do siwz Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych Przedmiot zamówienia obejmuje następujące elementy: L.p. Nazwa Ilość. Zestawienie komputera
MG-02L SYSTEM LASEROWEGO POMIARU GRUBOŚCI POLON-IZOT
 jednoczesny pomiar grubości w trzech punktach niewrażliwość na drgania automatyczna akwizycja i wizualizacja danych pomiarowych archiwum pomiarów analizy statystyczne dla potrzeb systemu zarządzania jakością
jednoczesny pomiar grubości w trzech punktach niewrażliwość na drgania automatyczna akwizycja i wizualizacja danych pomiarowych archiwum pomiarów analizy statystyczne dla potrzeb systemu zarządzania jakością
Badanie czujników odległości Laboratorium Mechatroniki i Robotyki
 Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Badanie czujników odległości Laboratorium Mechatroniki i Robotyki Wrocław 2017 1. Cel ćwiczenia Celem ćwiczenia jest poznanie zasady działania
Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Badanie czujników odległości Laboratorium Mechatroniki i Robotyki Wrocław 2017 1. Cel ćwiczenia Celem ćwiczenia jest poznanie zasady działania
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku
 kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
Robot Mobilny Mobot-Explorer
 Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Biomonitoring system kontroli jakości wody
 FIRMA INNOWACYJNO -WDROŻENIOWA ul. Źródlana 8, Koszyce Małe 33-111 Koszyce Wielkie tel.: 0146210029, 0146360117, 608465631 faks: 0146210029, 0146360117 mail: biuro@elbit.edu.pl www.elbit.edu.pl Biomonitoring
FIRMA INNOWACYJNO -WDROŻENIOWA ul. Źródlana 8, Koszyce Małe 33-111 Koszyce Wielkie tel.: 0146210029, 0146360117, 608465631 faks: 0146210029, 0146360117 mail: biuro@elbit.edu.pl www.elbit.edu.pl Biomonitoring
Rzeczywistość rozszerzona: czujniki do akwizycji obrazów RGB-D. Autor: Olga Głogowska 207 505 AiR II
 Rzeczywistość rozszerzona: czujniki do akwizycji obrazów RGB-D Autor: Olga Głogowska 207 505 AiR II Czujniki w robotyce coraz większego znaczenia nabierają systemy pomiarowe umożliwiające interakcję robota
Rzeczywistość rozszerzona: czujniki do akwizycji obrazów RGB-D Autor: Olga Głogowska 207 505 AiR II Czujniki w robotyce coraz większego znaczenia nabierają systemy pomiarowe umożliwiające interakcję robota
Moduł A. L.p. Pozycja Sztuk Uwagi 1. Arduino UNO R3 lub kompatybilny. 2. kabel USB typu A/B do podłączenia do komputera 1 do podłączenia do komputera
 Moduł A 5. dioda led czerwona 3 6. dioda RGB 7. opornik - rezystor 3 8. opornik - rezystor 2 wartość 0 kohm 9. mały przycisk - button 2 0. czujniki temperatury (MCP-9700) Czujnik temperatury o analogowym
Moduł A 5. dioda led czerwona 3 6. dioda RGB 7. opornik - rezystor 3 8. opornik - rezystor 2 wartość 0 kohm 9. mały przycisk - button 2 0. czujniki temperatury (MCP-9700) Czujnik temperatury o analogowym
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
mbot Ranger Robot edukacyjny 3-w-1
 mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
KOMPONENTY INERCJALNE
 KATALOG 2016/2017 KOMPONENTY INERCJALNE rozwiązania firmy KVH (USA) GPS.PL ul. Jasnogórska 23 31-358 Kraków tel. (012) 637 71 49 fax (012) 376 77 27 www.gps.pl C e n t r u m T e c h n i k L o k a l i z
KATALOG 2016/2017 KOMPONENTY INERCJALNE rozwiązania firmy KVH (USA) GPS.PL ul. Jasnogórska 23 31-358 Kraków tel. (012) 637 71 49 fax (012) 376 77 27 www.gps.pl C e n t r u m T e c h n i k L o k a l i z
SETEBOS-2S. Centralka kontrolno-pomiarowa Ethernet/GSM/RS232/485/IO/TH z funkcjami sterowania automatyką. funkcjonalności.
 Centralka kontrolno-pomiarowa Ethernet/GSM/RS232/485/IO/TH z funkcjami sterowania automatyką Funkcjonalność Urządzenie w swojej podstawowej funkcjonalności jest centralką kontrolno-pomiarową przeznaczoną
Centralka kontrolno-pomiarowa Ethernet/GSM/RS232/485/IO/TH z funkcjami sterowania automatyką Funkcjonalność Urządzenie w swojej podstawowej funkcjonalności jest centralką kontrolno-pomiarową przeznaczoną
Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG
 Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG Ergonomiczne, solidne i dokładne mierniki pozwalają na wykonywanie pomiarów grubości materiałów a różne możliwości różnych modeli pozwalają
Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG Ergonomiczne, solidne i dokładne mierniki pozwalają na wykonywanie pomiarów grubości materiałów a różne możliwości różnych modeli pozwalają
MOBOT RoboSnake. Moduł wieloczłonowego robota
 MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android
 Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android Wykonanie: Łukasz Tomaszowicz Promotor: dr inż. Jacek Kołodziej Cel pracy dyplomowej Celem pracy
Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android Wykonanie: Łukasz Tomaszowicz Promotor: dr inż. Jacek Kołodziej Cel pracy dyplomowej Celem pracy
Szczegółowy opis techniczny przedmiotu zamówienia
 Dotyczy projektu Opracowanie sensorycznego ekologicznego systemu ogrzewania budynku, zasilanego agregatem cieplnym typu ASHP realizowanego w ramach umowy UDA-RPPD.01.02.01-20-0095/17-00 z dnia 31.07.2018
Dotyczy projektu Opracowanie sensorycznego ekologicznego systemu ogrzewania budynku, zasilanego agregatem cieplnym typu ASHP realizowanego w ramach umowy UDA-RPPD.01.02.01-20-0095/17-00 z dnia 31.07.2018
Załącznik nr 10 do SIWZ
 Załącznik nr 10 do SIWZ Pieczęć firmowa Wykonawcy PARAMETRY TECHNICZNE I EKSPLOATACYJNE URZĄDZENIA DO REHABILITACJI Wyposażenie Liczba Nazwa i typ Producent Kraj produkcji Rok produkcji Klasa wyrobu medycznego*
Załącznik nr 10 do SIWZ Pieczęć firmowa Wykonawcy PARAMETRY TECHNICZNE I EKSPLOATACYJNE URZĄDZENIA DO REHABILITACJI Wyposażenie Liczba Nazwa i typ Producent Kraj produkcji Rok produkcji Klasa wyrobu medycznego*
STUDENCKIE KOŁO NAUKOWE CHIP
 STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
Mechatronika i inteligentne systemy produkcyjne. Paweł Pełczyński ppelczynski@swspiz.pl
 Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia
 Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Teltonika FMB920 Instrukcja montażu i konfiguracji
 Teltonika FMB920 Instrukcja montażu i konfiguracji FMB920 Mały (79x43x12 mm) i inteligentny lokalizator GPS z kartą micro SD, Bluetooth v3.0 i wewnętrzną baterią. Bluetooth Zintegrowany moduł BT umożliwia
Teltonika FMB920 Instrukcja montażu i konfiguracji FMB920 Mały (79x43x12 mm) i inteligentny lokalizator GPS z kartą micro SD, Bluetooth v3.0 i wewnętrzną baterią. Bluetooth Zintegrowany moduł BT umożliwia
Karta charakterystyki online APS-5101 APS SYSTEMY WSPOMAGANIA KIEROWCY
 Karta charakterystyki online APS-5101 APS A B C D E F H I J K L M N O P Q R S T Szczegółowe dane techniczne Cechy Obszary zastosowań Pojazdy Informacje do zamówienia Typ Więcej wersji urządzeń i akcesoriów
Karta charakterystyki online APS-5101 APS A B C D E F H I J K L M N O P Q R S T Szczegółowe dane techniczne Cechy Obszary zastosowań Pojazdy Informacje do zamówienia Typ Więcej wersji urządzeń i akcesoriów
Instrukcja obsługi. SQCA244 instrukcja obsługi
 Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. PPH WObit
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. PPH WObit
Mobilny system dowodzenia, obserwacji, rozpoznania i łączności
 1.30 1.71 Projekt rozwojowy nr O R00 0008 11 finansowany przez NCBiR pt.: Mobilny system dowodzenia, obserwacji, rozpoznania i łączności 23.11.2012, Gdańsk Informacje podstawowe XI konkurs na finansowanie
1.30 1.71 Projekt rozwojowy nr O R00 0008 11 finansowany przez NCBiR pt.: Mobilny system dowodzenia, obserwacji, rozpoznania i łączności 23.11.2012, Gdańsk Informacje podstawowe XI konkurs na finansowanie
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI. Robot do pokrycia powierzchni terenu
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
Bezprzewodowy transfer
 Tylko Bosch! Bezprzewodowy transfer i dokumentacja pomiarów NOWOŚĆ Dalmierz laserowy GLM 100 C Professional z aplikacją Inteligentne rozwiązanie umożliwiające transfer i dokumentację wyników pomiarowych.
Tylko Bosch! Bezprzewodowy transfer i dokumentacja pomiarów NOWOŚĆ Dalmierz laserowy GLM 100 C Professional z aplikacją Inteligentne rozwiązanie umożliwiające transfer i dokumentację wyników pomiarowych.
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Katedra Metrologii i Systemów Diagnostycznych Laboratorium Metrologii II. 2013/14. Grupa: Nr. Ćwicz.
 Politechnika Rzeszowska Katedra Metrologii i Systemów Diagnostycznych Laboratorium Metrologii II WYZNACZANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH PRZETWORNIKÓW Grupa: Nr. Ćwicz. 9 1... kierownik 2...
Politechnika Rzeszowska Katedra Metrologii i Systemów Diagnostycznych Laboratorium Metrologii II WYZNACZANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH PRZETWORNIKÓW Grupa: Nr. Ćwicz. 9 1... kierownik 2...
UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR
 UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR zestaw UNO R3 Starter Kit zawiera: UNO R3 (Compatible Arduino) x1szt. płytka stykowa 830 pól x1szt. zestaw 75 sztuk kabli do płytek stykowych
UNO R3 Starter Kit do nauki programowania mikroprocesorów AVR zestaw UNO R3 Starter Kit zawiera: UNO R3 (Compatible Arduino) x1szt. płytka stykowa 830 pól x1szt. zestaw 75 sztuk kabli do płytek stykowych
Przetwarzanie energii elektrycznej w fotowoltaice lato 2015/16. dr inż. Łukasz Starzak
 Przetwarzanie energii elektrycznej w fotowoltaice lato 2015/16 dr inż. Łukasz Starzak Politechnika Łódzka Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Katedra Mikroelektroniki i Technik
Przetwarzanie energii elektrycznej w fotowoltaice lato 2015/16 dr inż. Łukasz Starzak Politechnika Łódzka Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Katedra Mikroelektroniki i Technik
Szczegółowy Opis Przedmiotu Zamówienia- Część I
 Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
Specyfikacja techniczna:
 User manual Polski PL Proxi Shade jest modułem roletowym w obudowie dopuszkowej. Pozwala na sterowanie pozycją rolety, markizy itp. za pomocą aplikacji mobilnej Proxi jak i ręcznie przy użyciu klasycznych
User manual Polski PL Proxi Shade jest modułem roletowym w obudowie dopuszkowej. Pozwala na sterowanie pozycją rolety, markizy itp. za pomocą aplikacji mobilnej Proxi jak i ręcznie przy użyciu klasycznych
Specyfikacja techniczna:
 User manual Polski Proxi EU Plug to wtyczka sterowana zdalnie za pomocą BLE Bluetooth. Proxi EU Plug to przełącznik. Przełącznik: Po połączeniu z innym urządzeniem BLE, może być zdalnie włączany i wyłączany.
User manual Polski Proxi EU Plug to wtyczka sterowana zdalnie za pomocą BLE Bluetooth. Proxi EU Plug to przełącznik. Przełącznik: Po połączeniu z innym urządzeniem BLE, może być zdalnie włączany i wyłączany.
SETEBOS-2S. Centralka kontrolno-pomiarowa Ethernet/GSM/RS232/485/IO/TH z funkcjami sterowania automatyką
 Centralka kontrolno-pomiarowa Ethernet/GSM/RS232/485/IO/TH z funkcjami sterowania automatyką 1x 10/100/1000Mbit/s Ethernet, GSM zarządzanie/ monitoring Interfejs 1-wire do zewnętrznych czujników, temperatury,
Centralka kontrolno-pomiarowa Ethernet/GSM/RS232/485/IO/TH z funkcjami sterowania automatyką 1x 10/100/1000Mbit/s Ethernet, GSM zarządzanie/ monitoring Interfejs 1-wire do zewnętrznych czujników, temperatury,
DRTS 33 Automatyczny tester zabezpieczeń przekaźnikowych
 DRTS 33 Automatyczny tester zabezpieczeń przekaźnikowych Badanie wszystkich rodzajów przekaźników: elektromechanicznych, półprzewodnikowych, cyfrowych oraz IEC61850 Możliwość pracy lokalnej, kolorowy wyświetlacz
DRTS 33 Automatyczny tester zabezpieczeń przekaźnikowych Badanie wszystkich rodzajów przekaźników: elektromechanicznych, półprzewodnikowych, cyfrowych oraz IEC61850 Możliwość pracy lokalnej, kolorowy wyświetlacz
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT,
 Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. P.P.H.
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. P.P.H.
Inspirują nas ROZWIĄZANIA
 Inspirują nas ROZWIĄZANIA KTS 560 / KTS 590 Diagnoza sterowników za pomocą ESI[tronic] Najnowocześniejsza diagnoza sterowników zapewniająca maksymalną efektywność Nowe, dostosowane do pracy w warsztacie
Inspirują nas ROZWIĄZANIA KTS 560 / KTS 590 Diagnoza sterowników za pomocą ESI[tronic] Najnowocześniejsza diagnoza sterowników zapewniająca maksymalną efektywność Nowe, dostosowane do pracy w warsztacie
Indukcyjny czujnik przemieszczenia liniowego LI300P0-Q25LM0-LIU5X3-H1151
 prostopadłościenny, aluminium / tworzywo sztuczne Różne opcje montażowe Wskazania LED zakresu pomiarowego Odporność na zakłócenia elektromagnetyczne Wyjątkowo małe strefy martwe Rozdzielczość 12-bitowa
prostopadłościenny, aluminium / tworzywo sztuczne Różne opcje montażowe Wskazania LED zakresu pomiarowego Odporność na zakłócenia elektromagnetyczne Wyjątkowo małe strefy martwe Rozdzielczość 12-bitowa
Architektura Systemów Komputerowych. Transmisja szeregowa danych Standardy magistral szeregowych
 Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Budowa. doc. dr inż. Tadeusz Zieliński r. ak. 2009/10. Metody komputerowe w inżynierii komunikacyjnej
 Metody komputerowe w inżynierii komunikacyjnej Budowa źródło: TOPCON Machine control and Survey Solutions doc. dr inż. Tadeusz Zieliński r. ak. 2009/10 Układ wykładu systemy do zarządzania procesem budowy
Metody komputerowe w inżynierii komunikacyjnej Budowa źródło: TOPCON Machine control and Survey Solutions doc. dr inż. Tadeusz Zieliński r. ak. 2009/10 Układ wykładu systemy do zarządzania procesem budowy
ТТ TECHNIKA TENSOMETRYCZNA
 ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne siłowe СТ3 Czujniki tensometryczne siłowe CT1 są przeznaczone do pomiaru sił i obciążeń w różnych dziedzinach inżynierii i przemysłu. Czujniki wykonane
ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne siłowe СТ3 Czujniki tensometryczne siłowe CT1 są przeznaczone do pomiaru sił i obciążeń w różnych dziedzinach inżynierii i przemysłu. Czujniki wykonane
Częstościomierz wysokiej rozdzielczości
 Zakład Elektroniczny SECURUS Marek Pyżalski ul. Poplińskich 11 61-573 Poznań www.securus.com.pl marekp@securus.com.pl Częstościomierz wysokiej rozdzielczości Precyzyjny pomiar częstotliwości klasyczną
Zakład Elektroniczny SECURUS Marek Pyżalski ul. Poplińskich 11 61-573 Poznań www.securus.com.pl marekp@securus.com.pl Częstościomierz wysokiej rozdzielczości Precyzyjny pomiar częstotliwości klasyczną
DOSTAWA APARATURY BADAWCZO-POMIAROWEJ dla Katedry Systemów i Sieci Radiokomunikacyjnych. Do Projektu Przyszłościowe technologie dla obronności AEGIS
 Załącznik nr 6 do SIWZ DOSTAWA APARATURY BADAWCZO-POMIAROWEJ dla Katedry Systemów i Sieci Radiokomunikacyjnych Do Projektu Przyszłościowe technologie dla obronności AEGIS CZĘŚĆ 1: Miernik mocy średniej
Załącznik nr 6 do SIWZ DOSTAWA APARATURY BADAWCZO-POMIAROWEJ dla Katedry Systemów i Sieci Radiokomunikacyjnych Do Projektu Przyszłościowe technologie dla obronności AEGIS CZĘŚĆ 1: Miernik mocy średniej
Szczegółowy Opis Przedmiotu Zamówienia
 Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Wstęp do użytkowania modeli GP2D12 i GP2Y0A02 Podstawowe informacje techniczne Testy praktyczne czujnika GP2Y0A02
 Koło naukowe KoNaR: Czujniki odległości firmy SHARP Wstęp do użytkowania modeli GP2D12 i GP2Y0A02 Podstawowe informacje techniczne Testy praktyczne czujnika GP2Y0A02 Bolesław Jodkowski (część I) Karol
Koło naukowe KoNaR: Czujniki odległości firmy SHARP Wstęp do użytkowania modeli GP2D12 i GP2Y0A02 Podstawowe informacje techniczne Testy praktyczne czujnika GP2Y0A02 Bolesław Jodkowski (część I) Karol
Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG
 Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG Ergonomiczne, solidne i dokładne mierniki pozwalają na wykonywanie pomiarów grubości materiałów a różne możliwości różnych modeli pozwalają
Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG Ergonomiczne, solidne i dokładne mierniki pozwalają na wykonywanie pomiarów grubości materiałów a różne możliwości różnych modeli pozwalają
Robot mobilny klasy minisumo Wojak Wszechmocny. Robert Budziński
 Robot mobilny klasy minisumo Wojak Wszechmocny Robert Budziński Koło Naukowe Robotyków KoNaR" www.konar.pwr.wroc.pl Wrocław, 2008 Spis treści Od autora. 3 1. Wstęp... 4 2. Konstrukcja nośna.. 4 3. Układ
Robot mobilny klasy minisumo Wojak Wszechmocny Robert Budziński Koło Naukowe Robotyków KoNaR" www.konar.pwr.wroc.pl Wrocław, 2008 Spis treści Od autora. 3 1. Wstęp... 4 2. Konstrukcja nośna.. 4 3. Układ
GPRS-A. Uniwersalny moduł monitorujący. Skrócona instrukcja instalacji. Pełna instrukcja dostępna jest na stronie
 GPRS-A Uniwersalny moduł monitorujący Skrócona instrukcja instalacji Pełna instrukcja dostępna jest na stronie www.satel.pl Wersja oprogramowania 1.00 gprs-a_sii_pl 02/18 SATEL sp. z o.o. ul. Budowlanych
GPRS-A Uniwersalny moduł monitorujący Skrócona instrukcja instalacji Pełna instrukcja dostępna jest na stronie www.satel.pl Wersja oprogramowania 1.00 gprs-a_sii_pl 02/18 SATEL sp. z o.o. ul. Budowlanych
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia
 Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego. Paweł Rzucidło
 Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
pieczątka firmy Zał. 2
 pieczątka firmy Zał. 2 Formularz ofertowy w trybie przetargu nieograniczonego o wartości szacunkowej niŝszej od kwot określonych w przepisach wydanych na podstawie art. 11 ust. 8 ustawy Prawo zamówień
pieczątka firmy Zał. 2 Formularz ofertowy w trybie przetargu nieograniczonego o wartości szacunkowej niŝszej od kwot określonych w przepisach wydanych na podstawie art. 11 ust. 8 ustawy Prawo zamówień
Oprogramowanie analizatorów wibracji SignalCalc TURBO oprogramowanie do diagnostyki maszyn obrotowych
 ACE MOBILYZER Oprogramowanie analizatorów wibracji SignalCalc TURBO oprogramowanie do diagnostyki maszyn obrotowych SignalCalc TURBO oprogramowanie do diagnostyki maszyn obrotowych SignalCalc to nowy,
ACE MOBILYZER Oprogramowanie analizatorów wibracji SignalCalc TURBO oprogramowanie do diagnostyki maszyn obrotowych SignalCalc TURBO oprogramowanie do diagnostyki maszyn obrotowych SignalCalc to nowy,
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG
 Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG Ergonomiczne, solidne i dokładne mierniki pozwalają na wykonywanie pomiarów grubości materiałów a różne możliwości różnych modeli pozwalają
Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG Ergonomiczne, solidne i dokładne mierniki pozwalają na wykonywanie pomiarów grubości materiałów a różne możliwości różnych modeli pozwalają
Raport Robot mobilny klasy micromouse. Adrian Gałęziowski Paweł Urbaniak
 Raport Robot mobilny klasy micromouse Adrian Gałęziowski Paweł Urbaniak Wrocław, 12 marca 2013 Spis treści 1. Założenia projektu.................................... 2 2. Model w programie Autodeksk Inventor.......................
Raport Robot mobilny klasy micromouse Adrian Gałęziowski Paweł Urbaniak Wrocław, 12 marca 2013 Spis treści 1. Założenia projektu.................................... 2 2. Model w programie Autodeksk Inventor.......................
ТТ TECHNIKA TENSOMETRYCZNA
 ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne wagowe СТ5 Czujniki tensometryczne wagowe CT5 są przeznaczone do pomiaru sił i obciążeń w różnych dziedzinach inżynierii i przemysłu. Czujniki wykonane
ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne wagowe СТ5 Czujniki tensometryczne wagowe CT5 są przeznaczone do pomiaru sił i obciążeń w różnych dziedzinach inżynierii i przemysłu. Czujniki wykonane
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA
 WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
Karta charakterystyki online. WT27L-2S830A W27-2 Laser FOTOPRZEKAŹNIKI COMPACT
 Karta charakterystyki online WT27L-2S830A W27-2 Laser A B C D E F Rysunek może się różnić Informacje do zamówienia Typ Nr artykułu WT27L-2S830A 1016359 Więcej wersji urządzeń i akcesoriów www.sick.com/w27-2_laser
Karta charakterystyki online WT27L-2S830A W27-2 Laser A B C D E F Rysunek może się różnić Informacje do zamówienia Typ Nr artykułu WT27L-2S830A 1016359 Więcej wersji urządzeń i akcesoriów www.sick.com/w27-2_laser
Ćwiczenie nr 1. Diagnostyka aparatów słuchowych z wykorzystaniem komputera
 Ćwiczenie nr 1 Diagnostyka aparatów słuchowych z wykorzystaniem komputera : Zapoznanie się z metodą szybkiej oceny sprawności cyfrowego aparatu słuchowego przy wykorzystaniu komputera wraz z oprogramowaniem.
Ćwiczenie nr 1 Diagnostyka aparatów słuchowych z wykorzystaniem komputera : Zapoznanie się z metodą szybkiej oceny sprawności cyfrowego aparatu słuchowego przy wykorzystaniu komputera wraz z oprogramowaniem.
Autonomia robotów. Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska
 Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Laboratoria badawcze
 rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
Nowoczesne kamery termowizyjne opracowane w PCO S. A. przeznaczone do systemów przeciwlotniczych i systemów kierowania ogniem
 Seminarium Termowizja: Projekty badawcze i wdrożenia przemysłowe XXII MSPO Kielce, 02.09.2014 r. Nowoczesne kamery termowizyjne opracowane w PCO S. A. przeznaczone do systemów przeciwlotniczych i systemów
Seminarium Termowizja: Projekty badawcze i wdrożenia przemysłowe XXII MSPO Kielce, 02.09.2014 r. Nowoczesne kamery termowizyjne opracowane w PCO S. A. przeznaczone do systemów przeciwlotniczych i systemów
 Załącznik nr 3 Wymogi techniczne urządzeń. Stanowisko montażowo - pomiarowe Dotyczy: Zapytanie ofertowe nr POIG 4.4/07/11/2015 r. z dnia 10 listopada 2015 r. str. 1 1. Oscyloskop Liczba: 1 Parametr Pasmo
Załącznik nr 3 Wymogi techniczne urządzeń. Stanowisko montażowo - pomiarowe Dotyczy: Zapytanie ofertowe nr POIG 4.4/07/11/2015 r. z dnia 10 listopada 2015 r. str. 1 1. Oscyloskop Liczba: 1 Parametr Pasmo
Czujnik pojemnościowy BCT5-S18-UP6X2T-H1151
 Obudowa cylindryczna gwintowana M18 1 Tworzywo sztuczne, PA12-GF30 Tryb uczenia i konfiguracja przyciskami na urządzeniu, za pośrednictwem styku 5 i IO-Link Schemat podłączenia Typ Nr kat. 2101100 Uwaga
Obudowa cylindryczna gwintowana M18 1 Tworzywo sztuczne, PA12-GF30 Tryb uczenia i konfiguracja przyciskami na urządzeniu, za pośrednictwem styku 5 i IO-Link Schemat podłączenia Typ Nr kat. 2101100 Uwaga