Sterowanie impedancyjne demonstratory PŁ
|
|
|
- Sylwia Biernacka
- 8 lat temu
- Przeglądów:
Transkrypt
1 Sterowanie impedancyjne demonstratory PŁ

2 Przygotowywane demonstratory Robot Kawasaki FS-003N Typowy robot przemysłowy Sztywny łańcuch kinematyczny, zamknięty sterownik robota Zewnętrzna pętla regulacji impedancji Manipulator pneumatyczny Napęd bezpośredni Nieliniowe charakterystyki Kłopotliwe sterowanie pozycyjne Wbudowana regulacja impedancji Elementy manipulatora o napędzie hybrydowym Różne konfiguracje napędów Możliwość dokładnego sterowania pozycyjnego Naturalna podatność napędów pneumatycznych Wbudowany pomiar sił i momentów w złączach

3 Rys. 1 Kawasaki FS-003N
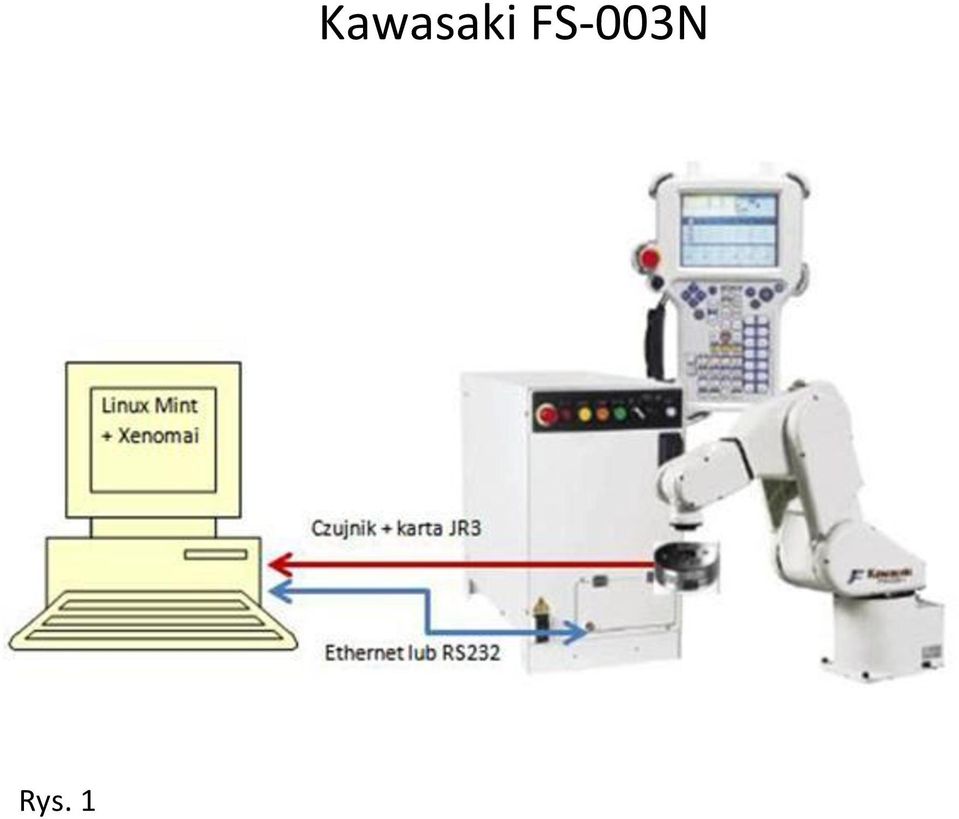
4 Kawasaki FS-003N Planowane scenariusze pracy: - ręczne wodzenie manipulatorem za uchwyt zamocowany za czujnikiem nadgarstkowym (różne impedancje manipulatora), - oddziaływanie manipulatora z otoczeniem o różnych impedancjach mechanicznych, - naciskanie klamki + otwieranie drzwi, - różne wersje zadania peg-in-hole, - przesuwanie elementu na sprężystym drucie o złożonym, trójwymiarowym kształcie Zastosowanie podatnego złącza pośredniczącego między sztywnym łańcuchem kinematycznym manipulatora i czujnikiem siły

5 Robot może być odpytywany o pozycję, prędkość, prąd w napędach, co może być wykorzystane w mechanizmach adaptacyjnych generatora trajektorii Możliwe jest dynamiczne definiowanie punktów roboczych względem ustalonego punktu odniesienia Ruch może być wykonywany w interpolacji przegubowej lub liniowej w układzie globalnym lub narzędzia

6 Rys. 2 Manipulator pneumatyczny

7 Manipulator pneumatyczny Rys. 3 - proporcjonalne zawory elektropneumatyczne Bosch-Rexroth ED02 - karty pomiarowe firmy National Instruments: PCIe czujnik siły ATI: MINI40

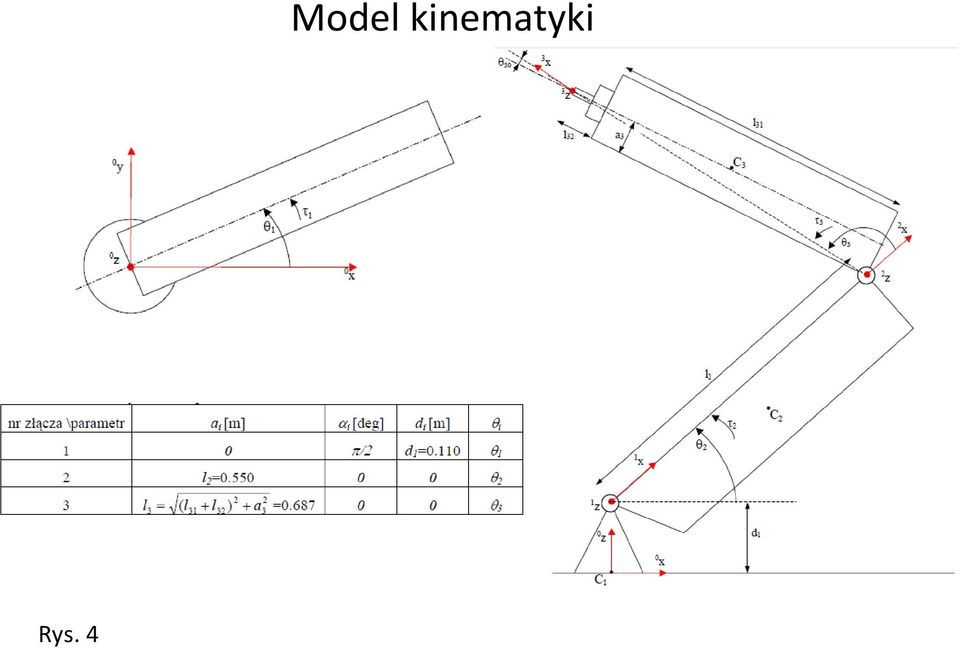
8 Rys. 4 Model kinematyki
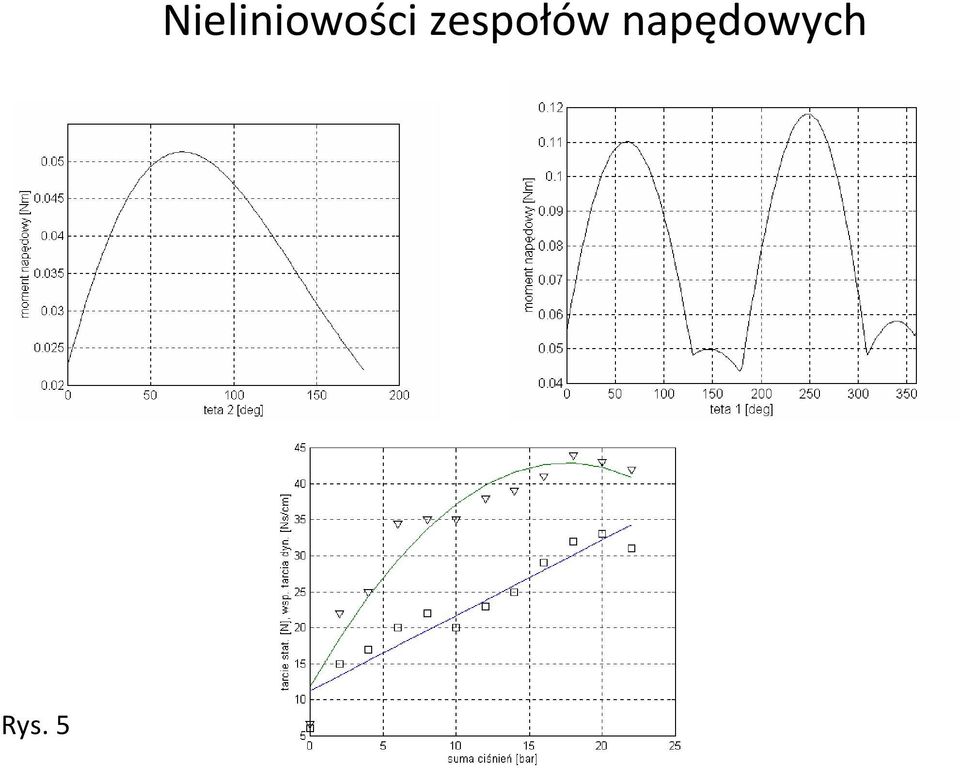
9 Rys. 5 Nieliniowości zespołów napędowych
10 Manipulator pneumatyczny Planowane scenariusze pracy: - ręczne wodzenie manipulatorem za uchwyt zamocowany na końcówce manipulatora (różne impedancje manipulatora), - naciskanie klamki + otwieranie drzwi przy ograniczonej liczbie DOF

11 Charakterystyki częstotliwościowe nowych zaworów proporcjonalnych Rys. 6

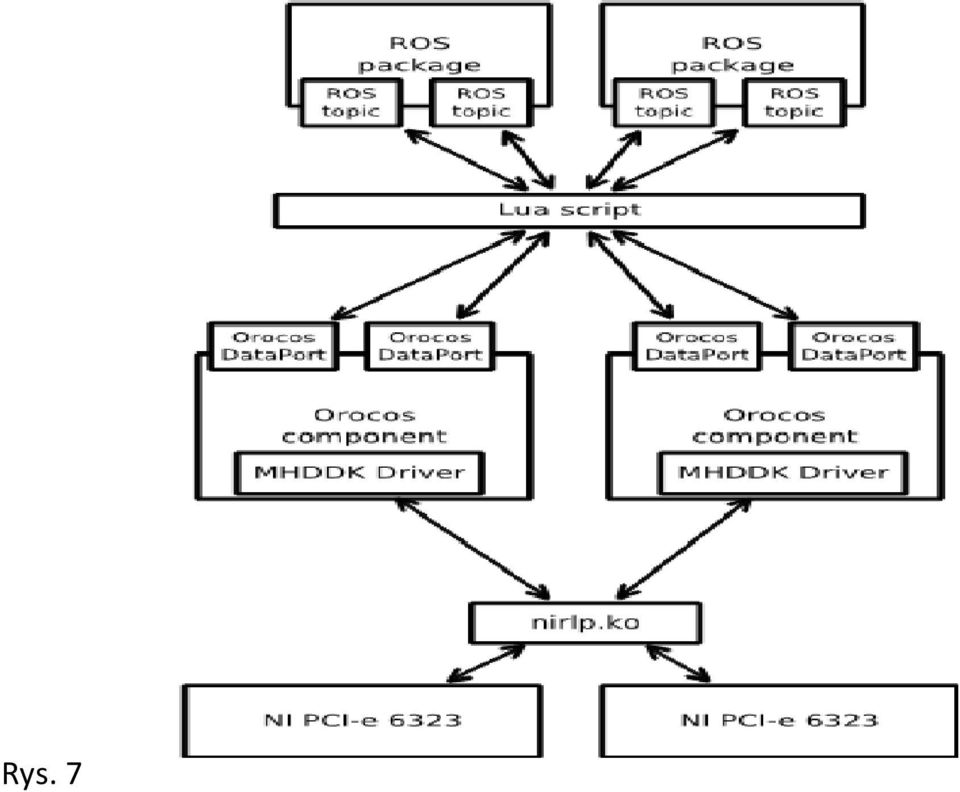
12 Struktura programowa układu sterowania - System operacyjny Linux Ubuntu LTS z łatkami Xenomai - Orocos zainstalowany jako ROS package - ROS: algorytmy np. kinematyka odwrotna - Orocos: obsługa kart pomiarowych, wykorzystanie wątków czasu rzeczywistego - MHDDK (Measurement Hardware Driver Development Kit): niskopoziomowe API sterownik producenta kart pomiarowych - Lua: język pozwalający tworzyć skrypty łączące topic (ROS) i DataPort(Orocos) w locie
: niskopoziomowe API sterownik producenta kart pomiarowych - Lua:")
13 Rys. 7
14 Napęd hybrydowy pneumatyczno-elektryczny Planowane scenariusze pracy: złącze liniowe - Zderzenie z przeszkodą, różne wersje: (i) jeden z siłowników udaje impedancję przeszkody drugi się z nią zderza, (ii) oba siłowniki pracujące równolegle zderzają się z przeszkodą; - Praca master-slave napędów z różnymi impedancjami, równoczesna realizacja przez oba napędy tej samej trajektorii pozycyjnej z różnymi impedancjami (obserwacja sił oddziaływania między napędami)

15 Rys. 8
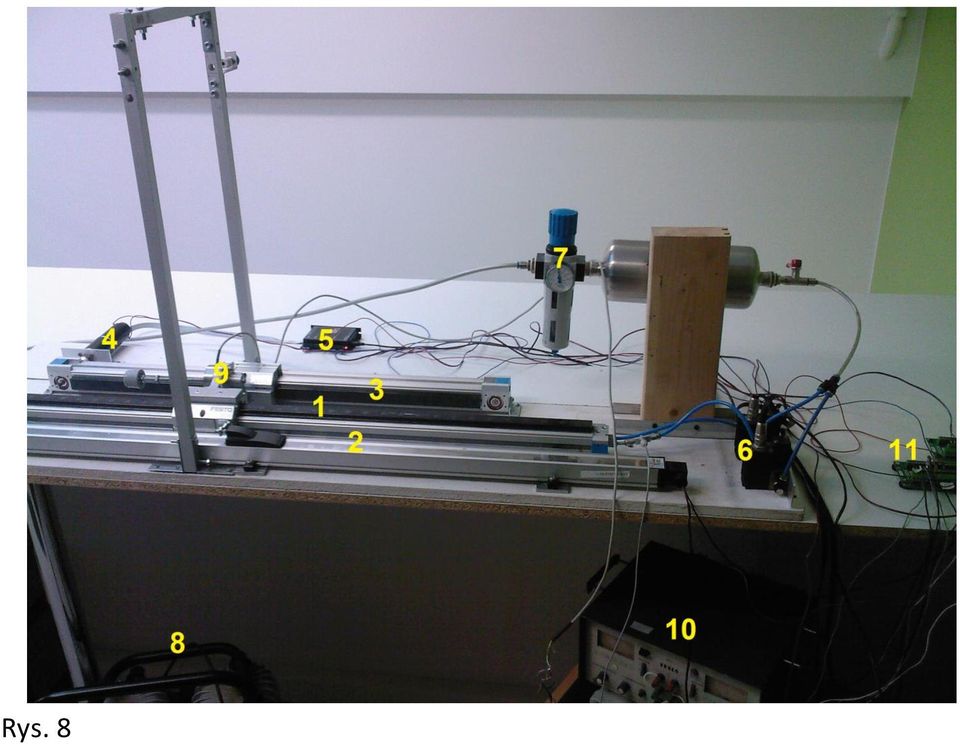
16 System liniowy do badania sterowania impedancyjnego (Rys. 8) składa się z dwóch napędów linowych: siłownika pneumatycznego (1) sprzężonego z potencjometrem (2), służącym do odczytywania pozycji, oraz napędu liniowego (3) połączonego z silnikiem elektrycznym (4), sterowanym przez driver (5). Siłownik pneumatyczny zasilany jest poprzez dwa zawory proporcjonalne (6). Powietrze o maksymalnym ciśnieniu 0,8 MPa (8 barów) dostarczane jest przez zespół przygotowania powietrza (7), który zasilany jest z kompresora (8). Za pomiar siły odpowiedzialny jest czujnik tensometryczny (9). Zasilanie elektryczne układu zapewniają dwa zasilacze AC/DC (10). Odczyt pomiarów i generowanie sygnałów sterujących odbywa się przy wykorzystaniu karty pomiarowej NI PCIe 6259 wpiętej do komputera PC. Sygnały z układu sterowania dostarczone są do karty za pomocą płytek połączeniowych NI CB-68LPR (11).
 dostarczane jest przez zespół przygotowania powietrza (7), który zasilany jest z kompresora (8).")
17 Rys. 9 Napęd hybrydowy obrotowy

18 Rys. 10 Manipulator o napędzie hybrydowym

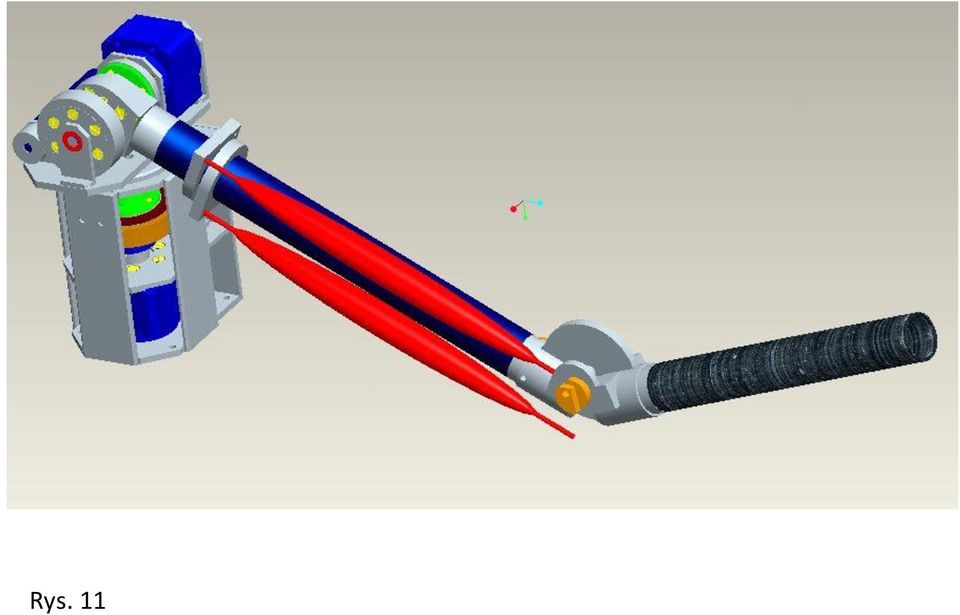
19 Rys. 11

20 Rys. 12 Chwytak trójpalczasty
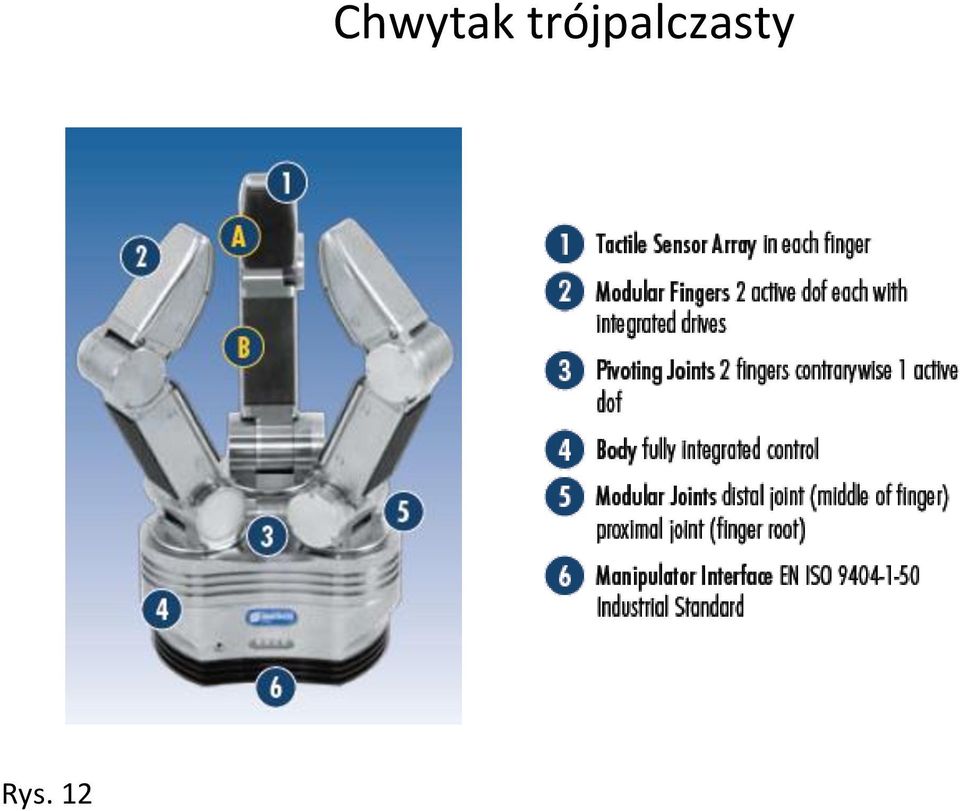
21 Chwytak trójpalczasty SCHUNK SDH 7 stopni swobody Czujniki taktylne Rozbudowane API w C++ i Pythonie Rys. 13
22 Przeprowadzone prace I. Badania dynamiki II. Podłączenie do ROS III. Interface IPython notebook IV. Przygotowanie do kontroli za pomocą rękawicy
23 Badanie dynamiki Badania pod kątem sterowania impedancyjnego Stosunkowo mała prędkość maksymalna (100 deg/s) Minimalny okres wysyłania poleceń prędkości 20ms Rys. 14
24 Podłączanie chwytaka do ROS Dostęp do całej funkcjonalności chwytaka z poziomu ROS Rozbudowa pakietu opracowanego przez Fraunhofer IPA Stuttgart Sterowanie przez Ethernet Wizualizacja w oparciu o model 3D Przeniesienie pracy na ROS Groovy Rys. 15
25 Interface: IPython Notebook Umożliwia interaktywną pracę z ROS Oparty o Python Może być węzłem ROS, usługą Daje możliwość pracy eksperymentalnej, przy jednoczesnym dokumentowaniu wyników Dostęp do wszystkich bibliotek Pythona oraz shell Linuxa Możliwa praca zdalna Darmowy
26 Koncept shadow hand Kontrola za pomocą rękawicy pozwala na intuicyjną manipulację Chwytak SCHUNK jest wolniejszy od ludzkiej dłoni problem ze sprzężeniem wizualnym Wizualizacja stanu zadanego shadow i obecnego pozwala na upewnienie się, jaka poza została zadana chwytakowi Rys. 16
27 Soft controller Chwytak w trybie pracy pozycyjnej zatrzymuje się po każdej nowej komendzie Opracowanie prostych softwarowych regulatorów PID umożliwiających kontrolę pozycyjną bez zatrzymywania Planowane rozwinięcie w stronę kontroli impedancji (przy połączeniu z kontrolowaniem stałych P I D wewnętrznego regulatora chwytaka)

28 Nauczanie ROS ROS ma bardzo duże możliwości ale wdrożenie się nowych użytkowników jest trudne Mymoderobot: Aplikacja umożliwiająca budowanie modeli robotów online za pomocą URDF Opracowane z myślą o studentach Rys. 17
29 Rys. 18 Chwytak trójpalczasty SCHUNK SDH
30 Rys. 19 Chwytak trójpalczasty SCHUNK SDH - naciskanie na palce od strony czujników taktylnych - łapanie obiektów o różnej impedancji mechanicznej - zamocowanie chwytaka na manipulatorze
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Laboratorium Sterowania Robotów Sprawozdanie
 Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
R 1. Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Załącznik nr 5. Opis przedmiotu zamówienia (Specyfikacja Techniczna)
") Załącznik nr 5. Opis przedmiotu zamówienia (Specyfikacja Techniczna) Część 1): Stanowisko do kursu Elektropneumatyka z oprzyrządowaniem 1 szt Stanowisko do ćwiczeń z zakresu pneumatyki i automatyzacji
Załącznik nr 5. Opis przedmiotu zamówienia (Specyfikacja Techniczna) Część 1): Stanowisko do kursu Elektropneumatyka z oprzyrządowaniem 1 szt Stanowisko do ćwiczeń z zakresu pneumatyki i automatyzacji
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa. Instrukcja do zajęć laboratoryjnych
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie własności statycznych siłowników pneumatycznych Ćwiczenie
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie własności statycznych siłowników pneumatycznych Ćwiczenie
Instrukcja obsługi SPEED CONTROL. Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy
 SPEED CONTROL Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy Informacje ogólne Sterownik Warren Rupp SPEED CONTROL może być stosowany do sterowania wydajnością pomp
SPEED CONTROL Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy Informacje ogólne Sterownik Warren Rupp SPEED CONTROL może być stosowany do sterowania wydajnością pomp
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Serwozawory 3/3 sterowane bezpośrednio przeznaczone do sterowania przepływem (LRWD2), ciśnieniem (LRPD2) i pozycją (LRXD2)
, ciśnieniem (LRPD2) i pozycją (LRXD2)") > Seria LR - cyfrowe serwozawory proporcjonalne Seria LR cyfrowe serwozawory proporcjonalne Nowość Serwozawory 3/3 sterowane bezpośrednio przeznaczone do sterowania przepływem (LRWD), ciśnieniem (LRPD)
> Seria LR - cyfrowe serwozawory proporcjonalne Seria LR cyfrowe serwozawory proporcjonalne Nowość Serwozawory 3/3 sterowane bezpośrednio przeznaczone do sterowania przepływem (LRWD), ciśnieniem (LRPD)
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia
 Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Hamulce pneumatyczne PN oraz hamulce elektropneumatyczne EP
 Hamulce pneumatyczne PN oraz hamulce elektropneumatyczne EP LEGENDA: 1 SPRĘŻARKA 2 ZBIORNIK GŁÓWNY 3 ZAWÓR ROZRZĄDCZY 4 WYLOT DO ATMOSFERY 5 CYLINDER HAMULCOWY -luzowanie hamulca -Hamowanie - odcięcie
Hamulce pneumatyczne PN oraz hamulce elektropneumatyczne EP LEGENDA: 1 SPRĘŻARKA 2 ZBIORNIK GŁÓWNY 3 ZAWÓR ROZRZĄDCZY 4 WYLOT DO ATMOSFERY 5 CYLINDER HAMULCOWY -luzowanie hamulca -Hamowanie - odcięcie
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Programowanie wielofunkcyjnej karty pomiarowej w VEE Data wykonania: 15.05.08 Data oddania: 29.05.08 Celem ćwiczenia była
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
PL B1. Sposób i układ sterowania przemiennika częstotliwości z falownikiem prądu zasilającego silnik indukcyjny
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia
 Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Rok akademicki: 2013/2014 Kod: RAR s Punkty ECTS: 5. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Mechanika Robotów. Wojciech Lisowski. 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej
 Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Laboratoria badawcze
 rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
Prototypowanie sterownika dla robota IRp-6
 1. Opis techniczny robota IRp-6. Prototypowanie sterownika dla robota IRp-6 Robot IRp-6 jest robotem elektrycznym wykorzystującym silniki prądu stałego do realizacji ruchu poszczególnych osi (ramion).
1. Opis techniczny robota IRp-6. Prototypowanie sterownika dla robota IRp-6 Robot IRp-6 jest robotem elektrycznym wykorzystującym silniki prądu stałego do realizacji ruchu poszczególnych osi (ramion).
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-3 BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-3 BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał
Kurs wybieralny: Zastosowanie technik informatycznych i metod numerycznych w elektronice
 Kurs wybieralny: Zastosowanie technik informatycznych i metod numerycznych w elektronice Opis kursu Przygotowanie praktyczne do realizacji projektów w elektronice z zastosowaniem podstawowych narzędzi
Kurs wybieralny: Zastosowanie technik informatycznych i metod numerycznych w elektronice Opis kursu Przygotowanie praktyczne do realizacji projektów w elektronice z zastosowaniem podstawowych narzędzi
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych. Instrukcja laboratoryjna R 17. Zadajnik położeń o sześciu stopniach swobody.
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Instrukcja laboratoryjna R 17 Zadajnik położeń o sześciu stopniach swobody. Instrukcja dla studentów studiów dziennych. Przygotował: mgr
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Instrukcja laboratoryjna R 17 Zadajnik położeń o sześciu stopniach swobody. Instrukcja dla studentów studiów dziennych. Przygotował: mgr
Więcej niż automatyka More than Automation
 Więcej niż automatyka More than Automation ZASTOSOWANIE SIŁOWNIKI PNEUMATYCZNE MEMBRANOWE WIELOSPRĘŻYNOWE TYP P5/R5 Z INTEGRALNYM USTAWNIKIEM ELEKTROPNEUMATYCZNYM Siłowniki pneumatyczne membranowe wielosprężynowe
Więcej niż automatyka More than Automation ZASTOSOWANIE SIŁOWNIKI PNEUMATYCZNE MEMBRANOWE WIELOSPRĘŻYNOWE TYP P5/R5 Z INTEGRALNYM USTAWNIKIEM ELEKTROPNEUMATYCZNYM Siłowniki pneumatyczne membranowe wielosprężynowe
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Prototypowanie sterownika dla robota 2DOF
 Prototypowanie sterownika dla robota 2DOF Opis techniczny robota. Robot 2DOF jest zespołem dwóch ramion o następujących danych: Liczba osi dwie. Rodzaj napędu silniki elektryczne prądu stałego typu PZTK
Prototypowanie sterownika dla robota 2DOF Opis techniczny robota. Robot 2DOF jest zespołem dwóch ramion o następujących danych: Liczba osi dwie. Rodzaj napędu silniki elektryczne prądu stałego typu PZTK
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki
 Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-2 BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski, dr inż. Michał Krępski
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-2 BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski, dr inż. Michał Krępski
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Industrial Ethernet Dokumentacja techniczna połączenia Sterowniki S7-400(300) firmy Siemens - System PRO-2000 firmy MikroB
 firmy Siemens - System PRO-2000 firmy MikroB") Industrial Ethernet Dokumentacja techniczna połączenia Sterowniki S7-400(300) firmy Siemens - System PRO-2000 firmy MikroB Zawartość: 1. Konfiguracja sterownika (STEP-7) 2. Definicja połączenia (STEP-7)
Industrial Ethernet Dokumentacja techniczna połączenia Sterowniki S7-400(300) firmy Siemens - System PRO-2000 firmy MikroB Zawartość: 1. Konfiguracja sterownika (STEP-7) 2. Definicja połączenia (STEP-7)
Podstawy robotyki - opis przedmiotu
 Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
20140428-1610. Oferta Firmy 2014. www.apautomatyka.pl
 20140428-1610 Oferta Firmy 2014 www.apautomatyka.pl Oferta firmy AP Automatyka urządzenia do pomiaru wilgotności i temperatury Rotronic urządzenia do pomiaru stężenia CO2 Rotronic urządzenia do kontroli
20140428-1610 Oferta Firmy 2014 www.apautomatyka.pl Oferta firmy AP Automatyka urządzenia do pomiaru wilgotności i temperatury Rotronic urządzenia do pomiaru stężenia CO2 Rotronic urządzenia do kontroli
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: STEROWNIKI PLC W UKŁADACH MECHATRONICZNYCH PLC CONTROLLERS IN MECHATRONIC SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA Rodzaj zajęć:
Nazwa przedmiotu: STEROWNIKI PLC W UKŁADACH MECHATRONICZNYCH PLC CONTROLLERS IN MECHATRONIC SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA Rodzaj zajęć:
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175233 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 307218 (22) Data zgłoszenia: 13.02.1995 (51) Int.Cl.6: E05F 15/02
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175233 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 307218 (22) Data zgłoszenia: 13.02.1995 (51) Int.Cl.6: E05F 15/02
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: STEROWNIKI W UKŁADACH NAPĘDOWYCH I STEROWANIA CONTROLLERS IN CONTROL AND DRIVE SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: PROJEKTOWANIE SYSTEMÓW MECHANICZNYCH
Nazwa przedmiotu: STEROWNIKI W UKŁADACH NAPĘDOWYCH I STEROWANIA CONTROLLERS IN CONTROL AND DRIVE SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: PROJEKTOWANIE SYSTEMÓW MECHANICZNYCH
Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi
 Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi PLASTECH 6-7 kwiecień 2017 Wittmann Group JACEK Denis Metral KULIŚ / 2016-10 Proces kontroli produkcji wtryskowni WWW ERP MES
Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi PLASTECH 6-7 kwiecień 2017 Wittmann Group JACEK Denis Metral KULIŚ / 2016-10 Proces kontroli produkcji wtryskowni WWW ERP MES
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
Tranzystory bipolarne. Właściwości wzmacniaczy w układzie wspólnego kolektora.
 I. Cel ćwiczenia ĆWICZENIE 6 Tranzystory bipolarne. Właściwości wzmacniaczy w układzie wspólnego kolektora. Badanie właściwości wzmacniaczy tranzystorowych pracujących w układzie wspólnego kolektora. II.
I. Cel ćwiczenia ĆWICZENIE 6 Tranzystory bipolarne. Właściwości wzmacniaczy w układzie wspólnego kolektora. Badanie właściwości wzmacniaczy tranzystorowych pracujących w układzie wspólnego kolektora. II.
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji E.18 Eksploatacja urządzeń i systemów mechatronicznych.
 Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji E.18 Eksploatacja urządzeń i systemów mechatronicznych. Układ elektropneumatyczny z dwoma siłownikami pracującymi
Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji E.18 Eksploatacja urządzeń i systemów mechatronicznych. Układ elektropneumatyczny z dwoma siłownikami pracującymi
Rok akademicki: 2012/2013 Kod: EIB BR-s Punkty ECTS: 3. Kierunek: Inżynieria Biomedyczna Specjalność: Biomechanika i robotyka
 Nazwa modułu: Serwomechanizmy i zaawansowane systemy sterowania Rok akademicki: 2012/2013 Kod: EIB-2-103-BR-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Nazwa modułu: Serwomechanizmy i zaawansowane systemy sterowania Rok akademicki: 2012/2013 Kod: EIB-2-103-BR-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
INSTRUKCJA OBSŁUGI Generatora impulsów PWM
 INSTRUKCJA OBSŁUGI Generatora impulsów PWM Przeznaczeniem generatora jest sterowanie różnymi zaworami lub elementami indukcyjnymi jak przekaźniki, siłowniki i inne elementy wykonawcze sterowane napięciem
INSTRUKCJA OBSŁUGI Generatora impulsów PWM Przeznaczeniem generatora jest sterowanie różnymi zaworami lub elementami indukcyjnymi jak przekaźniki, siłowniki i inne elementy wykonawcze sterowane napięciem
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap
 Siłowniki Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap Siłowniki membranowe do 2800 cm² Siłowniki elektryczne do 12,5 kn Siłowniki elektrohydrauliczne tłokowe
Siłowniki Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap Siłowniki membranowe do 2800 cm² Siłowniki elektryczne do 12,5 kn Siłowniki elektrohydrauliczne tłokowe
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: HYDRAULIKA, PNEUMATYKA I SYSTEMY AUTOMATYZACJI PRODUKCJI Hydraulics, pneumatics and production automation systems Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na
Nazwa przedmiotu: HYDRAULIKA, PNEUMATYKA I SYSTEMY AUTOMATYZACJI PRODUKCJI Hydraulics, pneumatics and production automation systems Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na
Nowości prawie w zasięgu ręki. ul. Wyścigowa 38 53-012 Wrocław tel. 71-364 72 88
 Nowości prawie w zasięgu ręki ul. Wyścigowa 38 53-012 Wrocław tel. 71-364 72 88 Tematyka prezentacji Kierunki rozwoju automatyki przemysłowej opartej na sprężonym powietrzu, mające na celu: pełne monitorowanie
Nowości prawie w zasięgu ręki ul. Wyścigowa 38 53-012 Wrocław tel. 71-364 72 88 Tematyka prezentacji Kierunki rozwoju automatyki przemysłowej opartej na sprężonym powietrzu, mające na celu: pełne monitorowanie
ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
2.2 Opis części programowej
 2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
Zautomatyzowane systemy produkcyjne Kod przedmiotu
 Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
AP Automatyka: Sonda do pomiaru wilgotności i temperatury HygroClip2-S
 AP Automatyka: Sonda do pomiaru wilgotności i temperatury HygroClip2-S Do aplikacji związanych z kontrolą wilgotności względnej i temperatury powietrza, w których liczy się dokładność pomiarów, proponujemy
AP Automatyka: Sonda do pomiaru wilgotności i temperatury HygroClip2-S Do aplikacji związanych z kontrolą wilgotności względnej i temperatury powietrza, w których liczy się dokładność pomiarów, proponujemy
PNEUMAX DIDACTIC automatyzacja w pneumatyce - system edukacyjny - pneumatyka i dydaktyka
 PNEUMAX DIDACTIC automatyzacja w pneumatyce - system edukacyjny - pneumatyka i dydaktyka Firma Pneumax proponuje nowoczesny system szkoleniowy PNEUMAX DIDACTIC. System ten oparty jest na kompletnych modułach
PNEUMAX DIDACTIC automatyzacja w pneumatyce - system edukacyjny - pneumatyka i dydaktyka Firma Pneumax proponuje nowoczesny system szkoleniowy PNEUMAX DIDACTIC. System ten oparty jest na kompletnych modułach
Laboratorium Napędu Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
LABORATORIUM PODSTAW ELEKTRONIKI MATERIAŁY POMOCNICZE SERIA PIERWSZA
 LABORATORIUM PODSTAW ELEKTRONIKI MATERIAŁY POMOCNICZE SERIA PIERWSZA 1. Lutowanie lutowania ołowiowe i bezołowiowe, przebieg lutowania automatycznego (strefy grzania i przebiegi temperatur), narzędzia
LABORATORIUM PODSTAW ELEKTRONIKI MATERIAŁY POMOCNICZE SERIA PIERWSZA 1. Lutowanie lutowania ołowiowe i bezołowiowe, przebieg lutowania automatycznego (strefy grzania i przebiegi temperatur), narzędzia
Pytania egzaminacyjne dla Kierunku Elektrotechnika. studia II stopnia stacjonarne i niestacjonarne
 A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0)
") Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0) Spis treści 1.Informację ogólne...2 2.Podstawowe parametry...2 3.Wejścia / wyjścia...2 4.Schemat blokowy...5 5.Zegar czasu rzeczywistego...6
Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0) Spis treści 1.Informację ogólne...2 2.Podstawowe parametry...2 3.Wejścia / wyjścia...2 4.Schemat blokowy...5 5.Zegar czasu rzeczywistego...6
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Podłączenia zasilania i sygnałów obiektowych z użyciem rozłącznych złącz zewnętrznych - suplement do instrukcji obsługi i montażu
 Automatyka Przemysłowa Sterowniki Programowalne Lazurowa 6/55, 01-315 Warszawa tel.: (0 prefix 22) 666 22 66 fax: (0 prefix 22) 666 22 66 Podłączenia zasilania i sygnałów obiektowych z użyciem rozłącznych
Automatyka Przemysłowa Sterowniki Programowalne Lazurowa 6/55, 01-315 Warszawa tel.: (0 prefix 22) 666 22 66 fax: (0 prefix 22) 666 22 66 Podłączenia zasilania i sygnałów obiektowych z użyciem rozłącznych
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Deski. Butelki. Bloczki. Zgrzewki Kanistry Szyby
 manipulatory pneumatyczne manipulatory podciśnieniowe wciągniki wózki manipulacyjne Deski Bloczki Butelki Zgrzewki Kanistry Szyby Wciagniki Wciągniki elektryczne (linowe i łańcuchowe) znajdują swoje
manipulatory pneumatyczne manipulatory podciśnieniowe wciągniki wózki manipulacyjne Deski Bloczki Butelki Zgrzewki Kanistry Szyby Wciagniki Wciągniki elektryczne (linowe i łańcuchowe) znajdują swoje
7. Zawór trójdrogowy do nagrzewnicy wodnej o charakterystyce stałoprocentowej
 FUNKCJE AUTOMATYKI CENTRALI NAWIEWNO-WYWIEWNEJ GOLEM-D-1S-2X Z WYSOKOSPRAWNYM WYMIENNIKIEM KRZYŻOWYM RECYRKULACJĄ I NAGRZEWNICĄ WODNĄ PODŁĄCZONA DO WYMIENNIKA GRUNTOWEGO. Centrala będzie pracować wg zegara
FUNKCJE AUTOMATYKI CENTRALI NAWIEWNO-WYWIEWNEJ GOLEM-D-1S-2X Z WYSOKOSPRAWNYM WYMIENNIKIEM KRZYŻOWYM RECYRKULACJĄ I NAGRZEWNICĄ WODNĄ PODŁĄCZONA DO WYMIENNIKA GRUNTOWEGO. Centrala będzie pracować wg zegara
ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES
 RYSZARD DINDORF, PAWEŁ ŁASKI, JAKUB TAKOSHOGLU, PIOTR WOŚ ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES S
RYSZARD DINDORF, PAWEŁ ŁASKI, JAKUB TAKOSHOGLU, PIOTR WOŚ ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES S
Układy napędowe maszyn - opis przedmiotu
 Układy napędowe maszyn - opis przedmiotu Informacje ogólne Nazwa przedmiotu Układy napędowe maszyn Kod przedmiotu 06.1-WM-MiBM-P-59_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa maszyn
Układy napędowe maszyn - opis przedmiotu Informacje ogólne Nazwa przedmiotu Układy napędowe maszyn Kod przedmiotu 06.1-WM-MiBM-P-59_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa maszyn
Str t a r żn ż ik k Moc o y c Um U o m wnej e (SMU M ) U - 1 -
 U - 1 -") Strażnik Mocy Umownej (SMU) - 1 - Przeznaczenie urządzenia Strażnik Mocy Umownej (SMU) jest urządzeniem przeznaczonym do prognozowania i kontroli mocy 15-sto minutowej w celu zapobiegania przekroczeniom
Strażnik Mocy Umownej (SMU) - 1 - Przeznaczenie urządzenia Strażnik Mocy Umownej (SMU) jest urządzeniem przeznaczonym do prognozowania i kontroli mocy 15-sto minutowej w celu zapobiegania przekroczeniom
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
MODEL MANIPULATORA O DWÓCH STOPNIACH SWOBODY
 Adam Labuda Janusz Pomirski Andrzej Rak Akademia Morska w Gdyni MODEL MANIPULATORA O DWÓCH STOPNIACH SWOBODY W artykule opisano konstrukcję modelu manipulatora o dwóch przegubach obrotowych. Obie osie
Adam Labuda Janusz Pomirski Andrzej Rak Akademia Morska w Gdyni MODEL MANIPULATORA O DWÓCH STOPNIACH SWOBODY W artykule opisano konstrukcję modelu manipulatora o dwóch przegubach obrotowych. Obie osie
1. Opis urządzenia. 2. Zastosowanie. 3. Cechy urządzenia -3-
 INSTRUKCJA OBSŁUGI Spis treści Spis treści... 2 1. Opis urządzenia... 3 2. Zastosowanie... 3 3. Cechy urządzenia... 3 4. Sposób montażu... 4 4.1. Uniwersalne wejścia... 4 4.2. Uniwersalne wyjścia... 4
INSTRUKCJA OBSŁUGI Spis treści Spis treści... 2 1. Opis urządzenia... 3 2. Zastosowanie... 3 3. Cechy urządzenia... 3 4. Sposób montażu... 4 4.1. Uniwersalne wejścia... 4 4.2. Uniwersalne wyjścia... 4
Roboty manipulacyjne (stacjonarne)
") Roboty manipulacyjne (stacjonarne) Podstawowe układy i zespoły Roboty przemysłowe składa się z następujących trzech podstawowych układów: zasilania, sterowania i ruchu. Układ zasilania Układ zasilania
Roboty manipulacyjne (stacjonarne) Podstawowe układy i zespoły Roboty przemysłowe składa się z następujących trzech podstawowych układów: zasilania, sterowania i ruchu. Układ zasilania Układ zasilania
ZAUTOMATYZUJ SIĘ. Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka
 ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O nas Firma WIKPER powstała w 2001 roku. Nasza siedziba znajduje się w miejscowości Grębów, województwo podkarpackie.
ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O nas Firma WIKPER powstała w 2001 roku. Nasza siedziba znajduje się w miejscowości Grębów, województwo podkarpackie.
PNEUMATYCZNA TECHNIKA PROPORCJONALNA
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-7 PNEUMATYCZNA TECHNIKA PROPORCJONALNA Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał Krępski
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-7 PNEUMATYCZNA TECHNIKA PROPORCJONALNA Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał Krępski
3/13/2012. Automatyka i Sterowanie PRz Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński. Odśrodkowy regulator prędkości
 Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego
 Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego Dziś bardziej niż kiedykolwiek narzędzia używane przez
Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego Dziś bardziej niż kiedykolwiek narzędzia używane przez
9.Tylko jedna odpowiedź jest poprawna. 10. Wybierz właściwą odpowiedź i zamaluj kratkę z odpowiadającą jej literą np., gdy wybrałeś odpowiedź A :
 6.Czytaj uważnie wszystkie zadania. 7. Rozwiązania zaznaczaj na KARCIE ODPOWIEDZI długopisem lub piórem z czarnym tuszem/atramentem. 8. Do każdego zadania podane są cztery możliwe odpowiedzi: A, B, C,
6.Czytaj uważnie wszystkie zadania. 7. Rozwiązania zaznaczaj na KARCIE ODPOWIEDZI długopisem lub piórem z czarnym tuszem/atramentem. 8. Do każdego zadania podane są cztery możliwe odpowiedzi: A, B, C,
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Szczegółowy opis laboratorium symulującego system produkcyjny
 Załącznik nr... (pieczęć firmowa Wykonawcy) Szczegółowy opis laboratorium symulującego system produkcyjny Opis pracowni: Laboratorium symulujące system produkcyjny zwane dalej pracownią systemów produkcyjnych
Załącznik nr... (pieczęć firmowa Wykonawcy) Szczegółowy opis laboratorium symulującego system produkcyjny Opis pracowni: Laboratorium symulujące system produkcyjny zwane dalej pracownią systemów produkcyjnych
Research & Development Ultrasonic Technology / Fingerprint recognition
 Research & Development Ultrasonic Technology / Fingerprint recognition DATA SHEETS & OPKO http://www.optel.pl email: optel@optel.pl Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Spółka z o.o. ul. Otwarta
Research & Development Ultrasonic Technology / Fingerprint recognition DATA SHEETS & OPKO http://www.optel.pl email: optel@optel.pl Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Spółka z o.o. ul. Otwarta
UKŁAD AUTOMATYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU STAŁEGO KONFIGUROWANY GRAFICZNIE
 UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
Załącznik 1. Obejmuje zdjęcia wykonanych stanowisk i pomocy dydaktycznych do laboratorium Specjalnych Metod Odlewania
 Załącznik 1 Obejmuje zdjęcia wykonanych stanowisk i pomocy dydaktycznych do laboratorium Specjalnych etod Odlewania Fot. 1. Ogólny widok laboratorium Napędu i Sterowania Hydrostatycznego na Wydziale Inżynierii
Załącznik 1 Obejmuje zdjęcia wykonanych stanowisk i pomocy dydaktycznych do laboratorium Specjalnych etod Odlewania Fot. 1. Ogólny widok laboratorium Napędu i Sterowania Hydrostatycznego na Wydziale Inżynierii
POZYCJONOWANIE SERWONAPĘDU ELEKTROPNEUMATYCZNEGO Z BEZPOŚREDNIM POMIAREM PRZEMIESZCZENIA I PRĘDKOŚCI TŁOKA SIŁOWNIKA
 Jakub Takosoglu, Ryszard Dindorf, Paweł Łaski, Piotr Woś Pozycjonowanie serwonapędu elektropneumatycznego z bezpośrednim pomiarem przemieszczenia i prędkości tłoka siłownika POZYCJONOWANIE SERWONAPĘDU
Jakub Takosoglu, Ryszard Dindorf, Paweł Łaski, Piotr Woś Pozycjonowanie serwonapędu elektropneumatycznego z bezpośrednim pomiarem przemieszczenia i prędkości tłoka siłownika POZYCJONOWANIE SERWONAPĘDU
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOMATION STUDIO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-14 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOMATION
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-14 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOMATION
Kiść robota. Rys. 1. Miejsce zabudowy chwytaka w robocie IRb-6.
 Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia