Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
|
|
|
- Bogumił Kucharski
- 6 lat temu
- Przeglądów:
Transkrypt
1 serwomechanizmy
2 Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem wyjściowym i powstały w ten sposób uchyb podawany jest na człon korekcyjny, a dalej na wzmacniacz. Wzmocniony sygnał trafia do siłownika, którego przemieszczenie jest wartością wyjściową układu. Zadaniem serwomechanizmu jest likwidacja błędów regulacji (uchybu przemieszczenia), powstających na skutek zmian wielkości wzorcowej, a więc klasyfikujemy go jako układ nadążny.
3 servomechanism - A feedback system that consists of a sensing element, amplifier, and servomotor, used in the automatic control of a mechanical device. Encyclopedia britannica servomechanism, automatic device used to correct the performance of a mechanism by means of an error-sensing feedback. The term servomechanism properly applies only to systems in which the feedback and error-correction signals control mechanical position or one of its derivatives such as velocity or acceleration.





4 Aplikacje - przykłady Elementy wykonawcze linii produkcyjnych, Autonomiczne elementy wykonawcze, Roboty, systemy przeciwlotnicze CNC
5 Wymagania dla serwomechanizmu przemysłowego Szybkość i dokładność śledzenia zadanej trajektorii, Odporność na zmiany parametrów (np.: moment bezwładności), Odporność na zmiany obciążenia (moment, tarcie, siły potencjalne), Zdalne sterowanie Możliwość pracy w trybie master slave, Rozbudowane interfejsy komunikacyjne, Przyjazny panel operatorski, Możliwość konfigurowania, w pewnym zakresie, struktury układu regulacji, Możliwa modyfikacja parametrów układu regulacji, Autotuning, Autodiagnostyka,
6 właściwości napędu serwomechanizmu ogólne Wysoka sprawność Małe wymiary Równomierna praca przy małych prędkościach Praca 4-kwadrantowa Napędy sterujące wzajemnym położeniem przedmiotu i narzędzia Napędy wykonujące pracę, Duży moment maksymalny, Duży moment znamionowy/ciągły
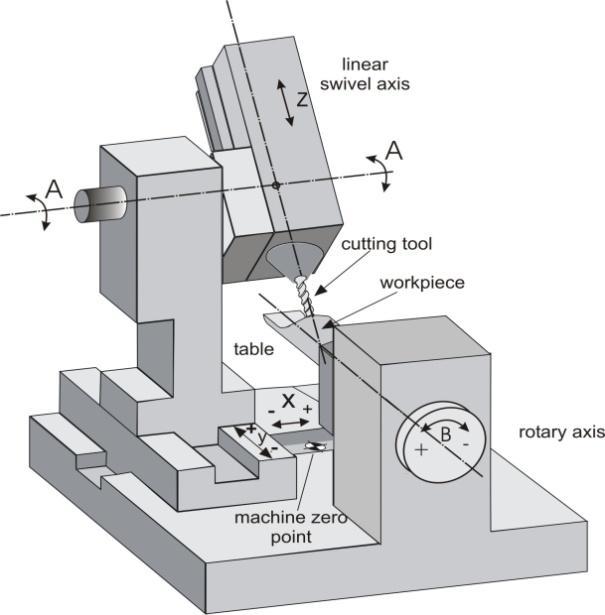
7 Struktura serwonapędu Zasilanie energia Układ sterowania PLC & PC Interface Przekształtnik Energoelektroniczny Silnik & czujniki Sygnały, informacje





8 Elementy wykonawcze silniki o ruchu obrotowym (Baumüller) (Baumüller) (Franz Kessler)



9 Przetwarzanie ruchu obrotowego (silnika) na liniowy

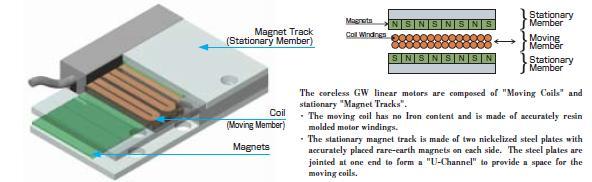


10 Elementy wykonawcze silniki liniowe

")

11 Czujniki położenia - Enkodery Technologia, zasada działania: Enkoder optyczny, Enkoder magnetyczny, Resolver, Sposób pomiaru: Inkrementalny, przyrostowy Absolutny Budowa: Liniowy, Obrotowy (jedno-, wielo-) Zalety:, + wysoka dokładność, Wady: - mała odporność środowiskowa, - możliwy luz mechaniczny, - dodatkowy koszt - dedykowane sprzęgło

12 Enkodery Optyczny Magnetyczny

13 Enkodery optyczne różne wymiary, sposoby montażu HEIDENHAIN



14 Enkoder magnetyczny obrotowy Dyskryminator pola 12 BIT PROGRAMMABLE MAGNETIC ROTARY ENCODER


15 Enkoder magnetyczny liniowy

16 Enkodery optyczne Absolutny Przyrostowy
17 Enkodery przyrostowe, inkrementalne Wykrywanie kierunku Zerowanie

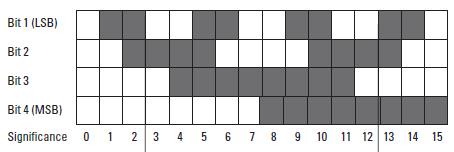
18 Enkodery absolutne - kody

19 Przekształtniki
20 Tryby pracy serwonapędu - przekładnia elektroniczna Virtual master Virtueller Master Synchronized Synchronisierte Kommunikation communication Hauptantrieb main drive

21 Tryby pracy serwonapędu synchronizacja pracy wielu napędów
22 Diagnostyka wbudowana
23 Silniki w serwomechanizmach Silniki prądu stałego, Silniki synchroniczne, Silniki krokowe


24 Silniki krokowe Bieguny są kolejno zasilane powodując ruch z małym krokiem. bardzo mała prędkość i duża precyzja ruchu są możliwe bez przekładni dzięki dużej ilości zębów na wirniku. Możliwa jest praca mikrokrokowa przez zasilanie dwóch cewek jednocześnie.
25 Silniki krokowe Sygnały sterujące silnikiem krokowym sa binarne, on-off (nie PWM) Reguła sterowania: aktywuj bieguny A B C D A or A D C B A kroki są o stałej wielkości, nie ma więc potrzeby stosowania czujnika kąta (sterowanie w pętli otwartej). W praktyce przyspieszenie i zryw są ograniczane, inaczej silnik może zacząć gubić kroki (powodując błąd położenia)
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Cel ćwiczenia. Przetwornik elektromagnetyczny. Silniki krokowe. Układ sterowania napędu mechatronicznego z silnikiem krokowym.
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
DOKŁADNOŚĆ SYNCHRONIZACJI RUCHU UKŁADÓW Z PRZEKŁADNIĄ ELEKTRONICZNĄ
 K O M I S J A B U D O W Y M A S Z Y N P A N O D D Z I A Ł W P O Z N A N I U Vol. 25 nr 1 lub 2 Archiwum Technologii Maszyn i Automatyzacji 5 WOJCIECH PTASZYŃSKI * DOKŁADNOŚĆ SYNCHRONIZACJI RUCHU UKŁADÓW
K O M I S J A B U D O W Y M A S Z Y N P A N O D D Z I A Ł W P O Z N A N I U Vol. 25 nr 1 lub 2 Archiwum Technologii Maszyn i Automatyzacji 5 WOJCIECH PTASZYŃSKI * DOKŁADNOŚĆ SYNCHRONIZACJI RUCHU UKŁADÓW
Enkoder magnetyczny AS5040.
 Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Od prostego pozycjonowania po synchronizację. Rozwiązania Sterowania Ruchem. Napędy Elektryczne i Sterowania
 Od prostego pozycjonowania po synchronizację Rozwiązania Sterowania Ruchem 1 Podstawy Silniki Sterowniki Serwo Sterowniki Motion Zajęcia praktyczne Przykłady parametryzacji serwonapędu Kreator parametryzacji
Od prostego pozycjonowania po synchronizację Rozwiązania Sterowania Ruchem 1 Podstawy Silniki Sterowniki Serwo Sterowniki Motion Zajęcia praktyczne Przykłady parametryzacji serwonapędu Kreator parametryzacji
Zastosowanie silników krokowych jako napęd robota mobilnego
 Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Wpływ tarcia na serwomechanizmy
 Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
Serwonapędy AC Serie EDC, EDB, ProNet
 Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: STEROWNIKI W UKŁADACH NAPĘDOWYCH I STEROWANIA CONTROLLERS IN CONTROL AND DRIVE SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: PROJEKTOWANIE SYSTEMÓW MECHANICZNYCH
Nazwa przedmiotu: STEROWNIKI W UKŁADACH NAPĘDOWYCH I STEROWANIA CONTROLLERS IN CONTROL AND DRIVE SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: PROJEKTOWANIE SYSTEMÓW MECHANICZNYCH
Falowniki Wektorowe Rexroth Fv Parametryzacja
 Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ
 KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
MiAcz3. Elektryczne maszynowe napędy wykonawcze
 MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
Sterowanie układem zawieszenia magnetycznego
 Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Mikroprocesorowy układ sterowania liniowych serwonapędów elektrohydraulicznych
 Mikroprocesorowy układ sterowania liniowych serwonapędów elektrohydraulicznych Chciuk Marcin 1, Bachman Paweł 2 Referat dotyczy tematyki sterowania oraz pozycjonowania liniowych serwomechanizmów elektrohydraulicznych.
Mikroprocesorowy układ sterowania liniowych serwonapędów elektrohydraulicznych Chciuk Marcin 1, Bachman Paweł 2 Referat dotyczy tematyki sterowania oraz pozycjonowania liniowych serwomechanizmów elektrohydraulicznych.
Sieci miejscowe stosowane w układach serwonapędowych. Zagadnienia komunikacji w nowoczesnych układach serwonapędowych R Θ. R ω R M
 Zagadnienia komunikacji w nowoczesnych układach serwonapędowych dr inŝ Stefan Brock Sieci miejscowe stosowane w układach serwonapędowych Serwonapędy układy regulacji połoŝenia, wyposaŝone w silniki wysokomomentowe
Zagadnienia komunikacji w nowoczesnych układach serwonapędowych dr inŝ Stefan Brock Sieci miejscowe stosowane w układach serwonapędowych Serwonapędy układy regulacji połoŝenia, wyposaŝone w silniki wysokomomentowe
Kontroler CSMIO/IP-A oraz Mach4
 Kontroler CSMIO/IP-A oraz Mach4 Quick start strojenie osi 1) Konfiguracje rozpoczynamy od przydzielenia osi Motoru. Jak widać na zdjęciu osi X został przydzielony Motor0 (poradnik omawia konfiguracje osi
Kontroler CSMIO/IP-A oraz Mach4 Quick start strojenie osi 1) Konfiguracje rozpoczynamy od przydzielenia osi Motoru. Jak widać na zdjęciu osi X został przydzielony Motor0 (poradnik omawia konfiguracje osi
Kacper Kulczycki. Krótko o silnikach krokowych (cz. 2.)
") Kacper Kulczycki Krótko o silnikach krokowych (cz. 2.) Plan na dziś: Co to jest? Jakie są rodzaje silników krokowych? Ile z tym zabawy? Gdzie szukać informacji? Co to jest silnik krokowy? Norma PN 87/E
Kacper Kulczycki Krótko o silnikach krokowych (cz. 2.) Plan na dziś: Co to jest? Jakie są rodzaje silników krokowych? Ile z tym zabawy? Gdzie szukać informacji? Co to jest silnik krokowy? Norma PN 87/E
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PAScz3. Elektryczne maszynowe napędy wykonawcze
 PAScz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
PAScz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
Falowniki serii 650G. Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw
 Falowniki serii 650G Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw AC650G Napędy AC Ogólnego zastosowania Zakres : 0,25 kw 7,5 kw Napędy AC650G idealnie nadają się do zastosowań wymagających dokładnego
Falowniki serii 650G Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw AC650G Napędy AC Ogólnego zastosowania Zakres : 0,25 kw 7,5 kw Napędy AC650G idealnie nadają się do zastosowań wymagających dokładnego
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: STEROWNIKI PLC W UKŁADACH MECHATRONICZNYCH PLC CONTROLLERS IN MECHATRONIC SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA Rodzaj zajęć:
Nazwa przedmiotu: STEROWNIKI PLC W UKŁADACH MECHATRONICZNYCH PLC CONTROLLERS IN MECHATRONIC SYSTEMS Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA Rodzaj zajęć:
Prototypowanie sterownika dla robota 2DOF
 Prototypowanie sterownika dla robota 2DOF Opis techniczny robota. Robot 2DOF jest zespołem dwóch ramion o następujących danych: Liczba osi dwie. Rodzaj napędu silniki elektryczne prądu stałego typu PZTK
Prototypowanie sterownika dla robota 2DOF Opis techniczny robota. Robot 2DOF jest zespołem dwóch ramion o następujących danych: Liczba osi dwie. Rodzaj napędu silniki elektryczne prądu stałego typu PZTK
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
PR242012 23 kwietnia 2012 Mechanika Strona 1 z 5. XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów
 Rozszerzony System Transportowy: nowatorska technologia napędów") Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia
 Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Mechatronika i inteligentne systemy produkcyjne. Sensory (czujniki)
") Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
Silniki serwo EMMS-AS
 Główne cechy Wszystko z jednego źródła Silniki EMMS-AS 4 Silnik serwo trwale wzbudzony, elektrodynamiczny, bezszczotkowy Wybór dwóch typów enkodera: Cyfrowy bezwzględny enkoder jednoobrotowy (standard)
Główne cechy Wszystko z jednego źródła Silniki EMMS-AS 4 Silnik serwo trwale wzbudzony, elektrodynamiczny, bezszczotkowy Wybór dwóch typów enkodera: Cyfrowy bezwzględny enkoder jednoobrotowy (standard)
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
Silniki skokowe EMMS-ST
 q/w Podstawowy program produkcyjny Festo Obejmuje 80% Twoich zadań automatyzacji Na całym świecie: Zawsze na stanie Znakomity: Jakość Festo w atrakcyjnej cenie Prostota: Zredukowana złożoność zamawiania
q/w Podstawowy program produkcyjny Festo Obejmuje 80% Twoich zadań automatyzacji Na całym świecie: Zawsze na stanie Znakomity: Jakość Festo w atrakcyjnej cenie Prostota: Zredukowana złożoność zamawiania
OPIS PRZEDMIOTU ZAMÓWIENIA Stanowiska do badania napędów elektrycznych i sterowania procesów
 OPIS PRZEDMIOTU ZAMÓWIENIA Stanowiska do badania napędów elektrycznych i sterowania procesów Załącznik nr 6 do SIWZ Nazwa pracowni Pracowania montażu i eksploatacji maszyn, instalacji elektrycznych oraz
OPIS PRZEDMIOTU ZAMÓWIENIA Stanowiska do badania napędów elektrycznych i sterowania procesów Załącznik nr 6 do SIWZ Nazwa pracowni Pracowania montażu i eksploatacji maszyn, instalacji elektrycznych oraz
ZAUTOMATYZUJ SIĘ. Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka
 ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O nas Firma WIKPER powstała w 2001 roku. Nasza siedziba znajduje się w miejscowości Grębów, województwo podkarpackie.
ZAUTOMATYZUJ SIĘ Automatyka Technika Napędowa Hydraulika Siłowa Pneumatyka O firmie O nas Firma WIKPER powstała w 2001 roku. Nasza siedziba znajduje się w miejscowości Grębów, województwo podkarpackie.
Silniki skokowe - cz. 1: budowa i zasada działania
 Jakub Wierciak Silniki skokowe - cz. 1: budowa i zasada działania Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania
Jakub Wierciak Silniki skokowe - cz. 1: budowa i zasada działania Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Przetworniki pomiarowe obrotu i przesunięcia liniowego
 Numer zamówieniowy: typ kołnierz i otwór pod wał względnie wał 14 = kołnierz synchro z otworem pod wał 12 mm 25 = kołnierz zaciskowy z wałem 12 mm 26 = kołnierz zaciskowy z wałem 12 mm i adapterem mocowanym
Numer zamówieniowy: typ kołnierz i otwór pod wał względnie wał 14 = kołnierz synchro z otworem pod wał 12 mm 25 = kołnierz zaciskowy z wałem 12 mm 26 = kołnierz zaciskowy z wałem 12 mm i adapterem mocowanym
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
SIŁOWNIKI ELEKTRYCZNE REMATIC
 SIŁOWNIKI ELEKTRYCZNE REMATIC System DMS Co to jest system DMS? - elektroniczny, bezkontaktowy system z bardzo dokładnym czujnikiem położenia - sterowanie siłowników bez elementów elektromechanicznych
SIŁOWNIKI ELEKTRYCZNE REMATIC System DMS Co to jest system DMS? - elektroniczny, bezkontaktowy system z bardzo dokładnym czujnikiem położenia - sterowanie siłowników bez elementów elektromechanicznych
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
6.2 RÓśNE WARIANTY PRACY
 6.2 RÓśNE WARIANTY PRACY WARIANT 1 wzmacniacz sterowany sygnałami PULSE ze sterownika VersaMax Micro PLUS sterownik VersaMax Micro Plus kable dołączone do wyjść PULSE i DIRECTION w sterowniku VersaMax
6.2 RÓśNE WARIANTY PRACY WARIANT 1 wzmacniacz sterowany sygnałami PULSE ze sterownika VersaMax Micro PLUS sterownik VersaMax Micro Plus kable dołączone do wyjść PULSE i DIRECTION w sterowniku VersaMax
Badanie powtarzalności pozycjonowania robota IRp-6
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Automatyka przemysłowa na wybranych obiektach. mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław
 Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Tytuł Aplikacji: Synchronizacja i pozycjonowanie w przetwornicach częstotliwości Danfoss.
 Poniższy artykuł został w pełni przygotowany przez Autoryzowanego Dystrybutora firmy Danfoss i przedstawia rozwiązanie aplikacyjne wykonane w oparciu o produkty z rodziny VLT Firma Danfoss należy do niekwestionowanych
Poniższy artykuł został w pełni przygotowany przez Autoryzowanego Dystrybutora firmy Danfoss i przedstawia rozwiązanie aplikacyjne wykonane w oparciu o produkty z rodziny VLT Firma Danfoss należy do niekwestionowanych
Systemy Wbudowane. Raspberry Pi Sterowanie serwomechanizmem (wersja 2019) Serwomechanizm. Serwomechanizm z silnikiem krokowym
 Serwomechanizm. Serwomechanizm z silnikiem krokowym") Serwomechanizm Możliwość dokładnego sterowania położenia (lub podobnej wartości) za pomocą układu ze sprzężeniem zwrotnym: Systemy Wbudowane Raspberry Pi Sterowanie serwomechanizmem (wersja 2019) Zadajemy
Serwomechanizm Możliwość dokładnego sterowania położenia (lub podobnej wartości) za pomocą układu ze sprzężeniem zwrotnym: Systemy Wbudowane Raspberry Pi Sterowanie serwomechanizmem (wersja 2019) Zadajemy
OKABLOWANIE W WYBRANYCH SYSTEMACH KOMUNIKACJI
 OKABLOWANIE W WYBRANYCH SYSTEMACH KOMUNIKACJI KLASYFIKACJA SIECI wielkość -odległość między najdalej położonymi węzłami sieć lokalna (LAN - Local Area Network) o zasięgu do kilku kilometrów sieć miejska
OKABLOWANIE W WYBRANYCH SYSTEMACH KOMUNIKACJI KLASYFIKACJA SIECI wielkość -odległość między najdalej położonymi węzłami sieć lokalna (LAN - Local Area Network) o zasięgu do kilku kilometrów sieć miejska
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F
 ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ
 KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
AP3.8.4 Adapter portu LPT
 AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
Obliczenia polowe silnika przełączalnego reluktancyjnego (SRM) w celu jego optymalizacji
 w celu jego optymalizacji") Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Zautomatyzowane systemy produkcyjne Kod przedmiotu
 Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Pytania egzaminacyjne dla Kierunku Elektrotechnika. studia II stopnia stacjonarne i niestacjonarne
 A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
AUTONOMOUS GUARDIAN ROBOT AUTONOMICZNY ROBOT WARTOWNIK
 Łukasz Bajda V rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AUTONOMOUS GUARDIAN ROBOT AUTONOMICZNY ROBOT WARTOWNIK Keywords: robot, guardian, PIR, H bridge Słowa kluczowe:
Łukasz Bajda V rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AUTONOMOUS GUARDIAN ROBOT AUTONOMICZNY ROBOT WARTOWNIK Keywords: robot, guardian, PIR, H bridge Słowa kluczowe:
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
Stanowisko napędów mechanicznych
 Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu
 Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
Energoelektronika Cyfrowa
 Energoelektronika Cyfrowa dr inż. Maciej Piotrowicz Katedra Mikroelektroniki i Technik Informatycznych PŁ piotrowi@dmcs.p.lodz.pl http://fiona.dmcs.pl/~piotrowi -> Energoelektr... Energoelektronika Dziedzina
Energoelektronika Cyfrowa dr inż. Maciej Piotrowicz Katedra Mikroelektroniki i Technik Informatycznych PŁ piotrowi@dmcs.p.lodz.pl http://fiona.dmcs.pl/~piotrowi -> Energoelektr... Energoelektronika Dziedzina
SYNCHRONIZACJA PRACY SERWONAPĘDÓW AC W REALIZACJI ZŁOŻONYCH RUCHÓW ELEMENTÓW WYKONAWCZYCH ROBOTÓW I MASZYN
 SYNCHRONIZACJA PRACY SERWONAPĘDÓW AC W REALIZACJI ZŁOŻONYCH RUCHÓW ELEMENTÓW WYKONAWCZYCH ROBOTÓW I MASZYN Mateusz MUSIAŁ, Krzysztof CHRAPEK, Mateusz GŁÓWKA Streszczenie: W artykule opisano przeprowadzone
SYNCHRONIZACJA PRACY SERWONAPĘDÓW AC W REALIZACJI ZŁOŻONYCH RUCHÓW ELEMENTÓW WYKONAWCZYCH ROBOTÓW I MASZYN Mateusz MUSIAŁ, Krzysztof CHRAPEK, Mateusz GŁÓWKA Streszczenie: W artykule opisano przeprowadzone
Analogowy sterownik silnika krokowego oparty na układzie avt 1314
 Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii 51 Konferencja Studenckich Kół Naukowych Bartłomiej Dąbek Adrian Durak - Elektrotechnika 3 rok - Elektrotechnika 3 rok Analogowy sterownik
Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii 51 Konferencja Studenckich Kół Naukowych Bartłomiej Dąbek Adrian Durak - Elektrotechnika 3 rok - Elektrotechnika 3 rok Analogowy sterownik
Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0)
") Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0) Spis treści 1.Informację ogólne...2 2.Podstawowe parametry...2 3.Wejścia / wyjścia...2 4.Schemat blokowy...5 5.Zegar czasu rzeczywistego...6
Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0) Spis treści 1.Informację ogólne...2 2.Podstawowe parametry...2 3.Wejścia / wyjścia...2 4.Schemat blokowy...5 5.Zegar czasu rzeczywistego...6
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
Cechy konstrukcyjne nowoczesnych obrabiarek CNC. Uchwyty przedmiotu obrabianego. Urządzenia wymiany narzędzi.
 Cechy konstrukcyjne nowoczesnych obrabiarek CNC. Uchwyty przedmiotu obrabianego. Urządzenia wymiany narzędzi. Materiały szkoleniowe. Opracował: mgr inż. Wojciech Kubiszyn 1. Cechy konstrukcyjne nowoczesnych
Cechy konstrukcyjne nowoczesnych obrabiarek CNC. Uchwyty przedmiotu obrabianego. Urządzenia wymiany narzędzi. Materiały szkoleniowe. Opracował: mgr inż. Wojciech Kubiszyn 1. Cechy konstrukcyjne nowoczesnych
Spis treści. Dzień 1. I Elementy układu automatycznej regulacji (wersja 1109) II Rodzaje regulatorów i struktur regulacji (wersja 1109)
 II Rodzaje regulatorów i struktur regulacji (wersja 1109)") Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Roboty przemysłowe. Wojciech Lisowski. 8 Przestrzenna Kalibracja Robotów
 Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Roboty przemysłowe Wojciech Lisowski 8 Przestrzenna Kalibracja Robotów Roboty Przemysłowe KRIM, WIMIR AGH w Krakowie 1 Zagadnienia:
Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Roboty przemysłowe Wojciech Lisowski 8 Przestrzenna Kalibracja Robotów Roboty Przemysłowe KRIM, WIMIR AGH w Krakowie 1 Zagadnienia:
POLITECHNIKA POZNAŃSKA
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
Model Prąd znamionowy
 ASTOR SERWONAPĘDY ASTRAADA SRV 6.3 WZMACNIACZE Wzmacniacz musi być dobrany na taką samą moc, jak silnik z nim współpracujący. Dostępne modele wzmacniaczy: Model Wejście Napięcie (V) Wyjście Moc (kw) Prąd
ASTOR SERWONAPĘDY ASTRAADA SRV 6.3 WZMACNIACZE Wzmacniacz musi być dobrany na taką samą moc, jak silnik z nim współpracujący. Dostępne modele wzmacniaczy: Model Wejście Napięcie (V) Wyjście Moc (kw) Prąd
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
MAGISTRALA PROFIBUS W SIŁOWNIKU 2XI
 DTR Załącznik nr 3 MAGISTRALA PROFIBUS W SIŁOWNIKU 2XI Wydanie 1.2 listopad 2012 r. 1 Załącznik nr 3 DTR 1. Własności interfejsu PROFIBUS DP Siłownik wyposażony w moduł Profibus DP można przyłączyć do
DTR Załącznik nr 3 MAGISTRALA PROFIBUS W SIŁOWNIKU 2XI Wydanie 1.2 listopad 2012 r. 1 Załącznik nr 3 DTR 1. Własności interfejsu PROFIBUS DP Siłownik wyposażony w moduł Profibus DP można przyłączyć do
Silniki prądu stałego z komutacją bezstykową (elektroniczną)
") Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
w układzie zamkniętym, czyli w układzie ze sprzężeniem zwrotnym (układzie regulacji automatycznej):
:") Urządzenia wejściowe i wyjściowe do sterowników PLC. Przetworniki pomiarowe Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania;
Urządzenia wejściowe i wyjściowe do sterowników PLC. Przetworniki pomiarowe Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania;
Laboratorium Maszyny CNC
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 5 Badanie dynamiki pozycjonowania stołu obrotowego w zakresie małych przemieszczeń Opracował: mgr inż. Krzysztof Netter
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 5 Badanie dynamiki pozycjonowania stołu obrotowego w zakresie małych przemieszczeń Opracował: mgr inż. Krzysztof Netter
Silniki skokowe EMMS-ST
 Główne cechy Wszystko z jednego źródła 4 2-fazowy silnik hybrydowy Opcjonalnie zintegrowany enkoder dla pracy typu Servo Lite (praca w pętli zamkniętej) Sinusoidalny prąd sterowania Opcjonalny hamulec
Główne cechy Wszystko z jednego źródła 4 2-fazowy silnik hybrydowy Opcjonalnie zintegrowany enkoder dla pracy typu Servo Lite (praca w pętli zamkniętej) Sinusoidalny prąd sterowania Opcjonalny hamulec
Przeciwpożarowe sterowniki dla bram zwijanych, sekcyjnych i przesuwnych. Fire-proof controls for roller shutters, sectional doors and sliding gates
 Przeciwpożarowe napędy bram Charakterystyka Characteristics Fire-proof door drives 36 Przeciwpożarowe sterowniki dla bram zwijanych, sekcyjnych i przesuwnych Fire-proof controls for roller shutters, sectional
Przeciwpożarowe napędy bram Charakterystyka Characteristics Fire-proof door drives 36 Przeciwpożarowe sterowniki dla bram zwijanych, sekcyjnych i przesuwnych Fire-proof controls for roller shutters, sectional
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Część 5. Mieszane analogowo-cyfrowe układy sterowania
 Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
PROJEKTOWANIE MECHATRONICZNE UKŁADY NAPĘDOWE OBRABIAREK
 PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl Wśród układów napędowych obrabiarek można rozróżnić napędy główne
PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl Wśród układów napędowych obrabiarek można rozróżnić napędy główne
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Zasady doboru mikrosilników prądu stałego
 Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
PRZEMIENNIKI CZĘSTOTLIWOŚCI W DWUSIL- NIKOWYM NAPĘDZIE WAŁU TAŚMOCIĄGU PO- WIERZCHNIOWEGO
 PRZEMIENNIKI CZĘSTOTLIWOŚCI W DWUSIL- NIKOWYM NAPĘDZIE WAŁU TAŚMOCIĄGU PO- WIERZCHNIOWEGO BERNARD SZYMAŃSKI, JERZY SZYMAŃSKI Politechnika Warszawska, Politechnika Radomska szymansb@isep.pw.edu.pl, j.szymanski@pr.radom.pl
PRZEMIENNIKI CZĘSTOTLIWOŚCI W DWUSIL- NIKOWYM NAPĘDZIE WAŁU TAŚMOCIĄGU PO- WIERZCHNIOWEGO BERNARD SZYMAŃSKI, JERZY SZYMAŃSKI Politechnika Warszawska, Politechnika Radomska szymansb@isep.pw.edu.pl, j.szymanski@pr.radom.pl
ul. Szyb Walenty Ruda Śląska
 MNIEJ PRZESTOJÓW W TWOJEJ FIRMIE Zwiększ wydajność i zyski swojej firmy, wybierając specjalistów w naprawach i dostawie elektroniki przemysłowej Kontroltek. Inżynierowie Kontroltek, dzięki swojemu wieloletniemu
MNIEJ PRZESTOJÓW W TWOJEJ FIRMIE Zwiększ wydajność i zyski swojej firmy, wybierając specjalistów w naprawach i dostawie elektroniki przemysłowej Kontroltek. Inżynierowie Kontroltek, dzięki swojemu wieloletniemu
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Załącznik nr 1 do Zapytania ofertowego
 Załącznik nr 1 do Zapytania ofertowego Lp. Specyfikacja Zgodność ze UWAGI specyfikacją (TAK/NIE) 1 Motoreduktor planetarny napięcie zasilania 24[VDC] prędkość obrotowa na wyjściu przekładni 60-75 [obr/min]
Załącznik nr 1 do Zapytania ofertowego Lp. Specyfikacja Zgodność ze UWAGI specyfikacją (TAK/NIE) 1 Motoreduktor planetarny napięcie zasilania 24[VDC] prędkość obrotowa na wyjściu przekładni 60-75 [obr/min]
Instrukcja obsługi AP3.8.4 Adapter portu LPT
 Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
NX70 PLC www.atcontrol.pl
 NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa
 Technologia napędowa \ Automatyzacja napędów \ Integracja systemowa \ Serwis Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa Lat 2 Zdecentralizowana jednostka napędowa Minimalny wysiłek
Technologia napędowa \ Automatyzacja napędów \ Integracja systemowa \ Serwis Prostota i wydajność: Nowa zdecentralizowana jednostka napędowa Lat 2 Zdecentralizowana jednostka napędowa Minimalny wysiłek
Table of Contents. Table of Contents UniTrain-I Kursy UniTrain Kursy UniTrain: Maszyny elektryczne List of articles:
 Table of Contents Table of Contents UniTrain-I Kursy UniTrain Kursy UniTrain: Maszyny elektryczne List of articles: 1 2 2 3 4 Lucas Nülle GmbH 1/12 www.lucas-nuelle.pl UniTrain-I UniTrain is a multimedia
Table of Contents Table of Contents UniTrain-I Kursy UniTrain Kursy UniTrain: Maszyny elektryczne List of articles: 1 2 2 3 4 Lucas Nülle GmbH 1/12 www.lucas-nuelle.pl UniTrain-I UniTrain is a multimedia