POLITECHNIKA RZESZOWSKA WYDZIAŁ BUDOWNICTWA I INżYNIERII ŚRODOWISKA Katedra Geodezji i Geotechniki im. K. Weigla
|
|
|
- Stanisława Marta Ciesielska
- 7 lat temu
- Przeglądów:
Transkrypt
1 POLITECHNIKA RZESZOWSKA WYDZIAŁ BUDOWNICTWA I INżYNIERII ŚRODOWISKA Katedra Geodezji i Geotechniki im. K. Weigla Roman J. Kadaj WYKŁADY Z GEODEZJI NA KIERUNKU BUDOWNICTWO [ zbiór materiałów wizualnych - wersja 015/ ] Wykaz tematów głównych 01. Wprowadzenie do przedmiotu 02. Globalne powierzchnie i układy odniesienia 03. Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie 04. Układy odniesienia, osnowy i sieci geodezyjne 05. Naziemne techniki pomiarowe 06. Fotogrametria, teledetekcja i skaning 07. Techniki satelitarne (GNSS) w zastosowaniach geodezyjnych 08. Elementarne zadania rachunkowe 09. Podstawy teorii błędów i wyrównania obserwacji 10. Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych 11. Metody pomiarów i przedstawiania rzeźby terenu 12. Wyznaczanie pól powierzchni i objętości mas 13. Pomiary realizacyjne 14. Pomiary przemieszczeń i odkształceń 15. Pomiary wodne 16. Programy obliczeń geodezyjnych 17. Systemy Informacji o Terenie (SIT) 18. Prawo geodezyjne i kartograficzne 1
2 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu TEMAT 1: WPROWADZENIE DO PRZEDMIOTU Geodezja jako nauka, technika i dział gospodarki narodowej Przykłady map różnych rodzajów Ogólna definicja i klasyfikacje map Podstawowe procesy technologiczne w geodezji Działy specjalne geodezji 2
3 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu GEODEZJA JAKO NAUKA, TECHNIKA I DZIAŁ GOSPODARKI NARODOWEJ NAUKI POKREWNE: GEOGRAFIA, GEOLOGIA, GEOFIZYKA, GEOMORFOLOGIA, GEOMETRIA ZNACZENIE PIERWOTNE: grec.: GEO (ziemia) + DAISO (dzielić) USTALANIE GRANIC I PODZIAŁ NIERUCHOMOŚCI ZIEMSKICH, REJESTR GRUNTÓW DZISIAJ JEST TO TYLKO CZĘŚĆ GEODEZJI ZWIĄZANEJ Z EWIDENCJĄ (KATASTREM) NIERUCHOMOŚCI OGÓLNY CEL GEODEZJI (AKTUALNIE): METRYCZNE UJMOWANIE RZECZY (OBIEKTÓW) I ZJAWISK (REJESTROWANIE ZMIAN) W PRZESTRZENI FIZYCZNEJ ZIEMI, GLOBALNIE, REGIONALNIE, LOKALNIE. [ METRYCZNE UJMOWANIE: POMIARY => PRZETWARZANIE WYNIKÓW POMIARÓW => TWORZENIE PRODUKTÓW UŻYTKOWYCH (MAPY, ZBIORY DANYCH, ODWZOROWANIA PROJEKTÓW W TERENIE) ] ZADANIA GEODEZJI DLA CELÓW GOSPODARCZYCH: WYKONYWANIE MAP GOSPODARCZYCH, TOPOGRAFICZNYCH, TEMATYCZNYCH POMIARY REALIZACYJNE PROJEKTÓW INŻYNIERSKICH EWIDENCJA GRUNTÓW I BUDYNKÓW (KATASTER NIERUCHOMOŚCI), SCALENIA I WYMIANY GRUNKTÓW, PODZIAŁY NIERUCHOMOŚCI, POMIARY SPECJALNE (np. POMIARY PRZEMIESZCZEŃ I ODKSZTAŁCEŃ OBIEKTÓW) 3
4 4

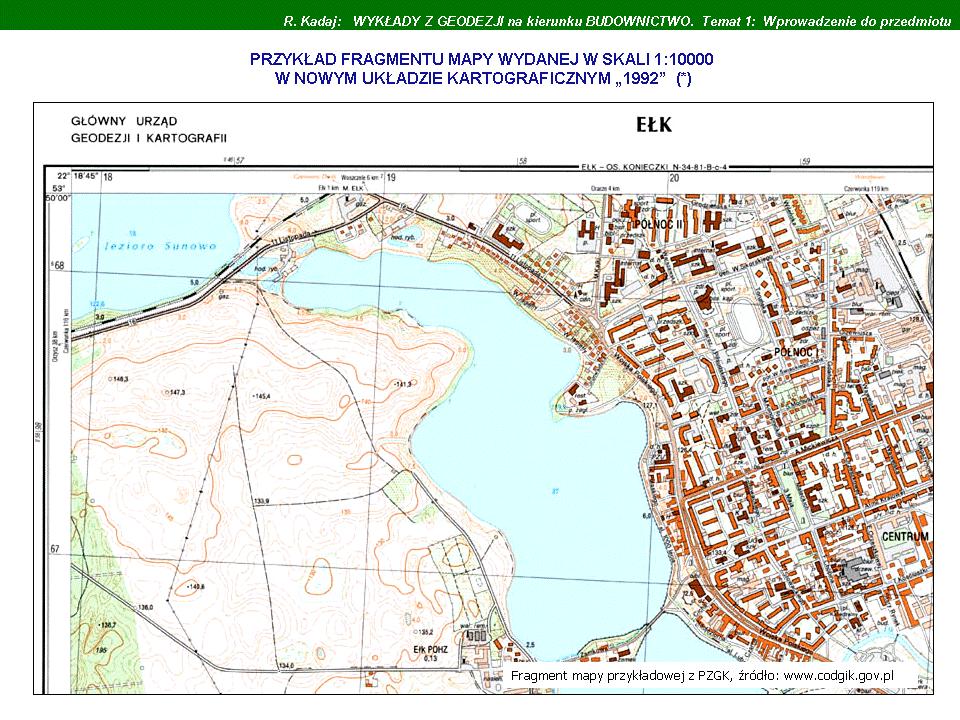
5 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu PRZYKŁADOWY FRAGMENT MAPY TOPOGRAFICZNEJ W SKALI 1: WYKONANEJ W DAWNYM UKŁADZIE KARTOGRAFICZNYM 1942 (MAPA SŁUŻYŁA GŁÓWNIE CELOM WOJSKOWYM) 5 Źródło: fragment mapy z PZGK
6 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu WYCINEK MAPY GOSPODARCZEJ (ZASADNICZEJ) W SKALI 1: 500, JAKO MAPY WEKTOROWEJ WYKONANEJ W UKŁADZIE PAŃSTWOWYM 2000, PRZY UŻYCIU PROGRAMU <EWMAPA> 6 Fragment mapy z PZGK

7 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu WYCINEK MAPY EWIDENCJI GRUNTÓW W SKALI 1: 500, WYKONANEJ W PROGRAMIE <EWMAPA> 7 Fragment mapy z PZGK
 MAPY GOSPODARCZEJ W SKALI 1: 500 PRZETWORZONEJ NA POSTAĆ")
8 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu FRAGMENT DAWNEJ (ANALOGOWEJ) MAPY GOSPODARCZEJ W SKALI 1: 500 PRZETWORZONEJ NA POSTAĆ CYFROWĄ (RASTROWĄ) PRZEZ SKANOWANIE I KALIBRACJĘ 8 Fragment mapy z PZGK

9 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu Ortofotomapa [ mapa wykonana z przetworzenia zdjęć lotniczych (przekształcenia rzutów środkowych na rzuty ortogonalne poprzez stereomodele utworzone z par zdjęć lub numeryczny model terenu - NMT ) ]. Przykładowy fragment ortofotomapy cyfrowej [ wykonanej ze zdjęć cyfrowych i NMT (DTM) *) ] przesunięcie obrazu spowodowane topografią 1:M Źródło: - ortofotomapa ilustracyjna RZUT ŚRODKOWY (fotogram cyfrowy) przetwarzanie przy użyciu NMT także tworzonego ze stereo-modeli (eliminacja zniekształceń obrazu wywołanych topografią) RZUT LOKALNIE ORTOGONALNY (obraz rastrowy po ortorektyfikacji ) *) NMT Numeryczny Model Terenu (DTM Digital Terrain Model) 9
")
10 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu Zasada tworzenia mapy trójwymiarowej (płaski, aksonometryczny obraz przestrzeni trójwymiarowej) Z Źródło: GEOSYSTEMS / ERDAS IMAGINE - ilustracja Y X (lokalna aksonometria) 10

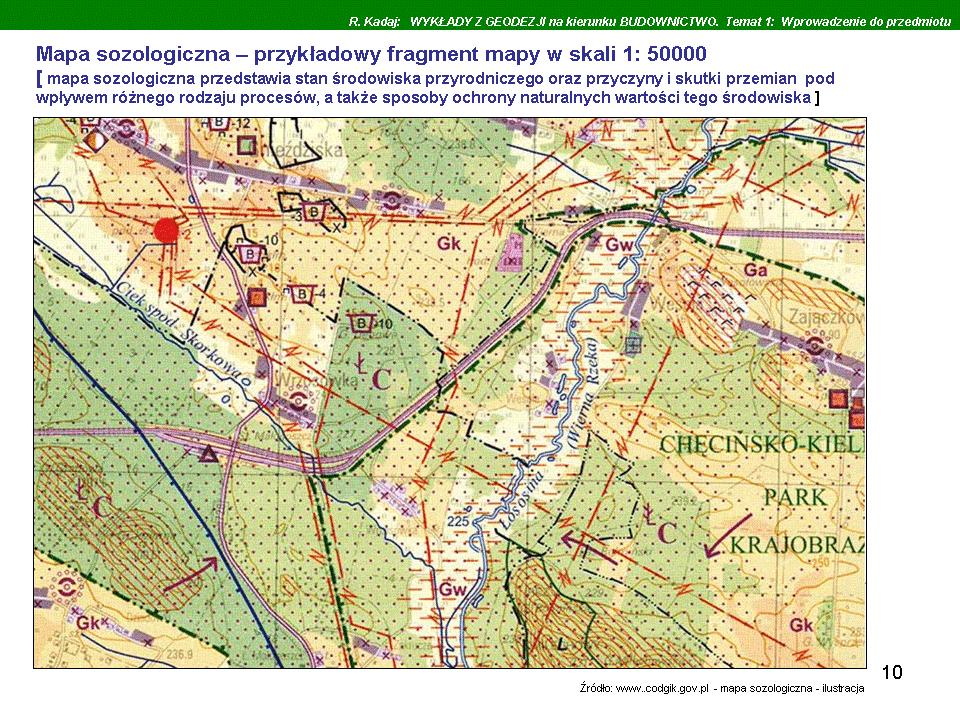
11 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu Mapa hydrograficzna [ przedstawia naturalne i sztuczne obiekty wodne, powierzchniowe i podziemne. Wybrane znaki umowne podane w temacie 15 ] Przykładowy fragment mapy w skali 1 : 50000: Tereny zalewowe Tereny bagienne Tereny podmokłe okresowo 11 Źródło: - mapa hydrograficzna ilustracja przykładowa
12 12
13 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu OGÓLNA DEFINICJA I KLASYFIKACJE MAP MAPA: odwzorowanie struktury powierzchni ziemi i związanych z nią obiektów na płaszczyźnie i zobrazowane w umownej skali. ODWZOROWANIE: Powierzchnia topograficzna Matematyczna powierzchnia odniesienia (elipsoida) Płaszczyzna odwzorowania SKALA MAPY, KLASYFIKACJE ds /ΔS = 1 : M [ ds długość odcinka na mapie, ΔS długość odpowiadającego odcinka na oryginalnej płaszczyźnie odwzorowawczej powierzchni odniesienia ] (M mianownik: 500, 1000, 2000 mapy wielkoskalowe 5000, mapy średnioskalowe 25000, 50000, , mapy małoskalowe KLASYFIKACJA CELOWA (UŻYTKOWA): - gospodarcze: katastralne, zasadnicze, specjalne (wielko i średnioskalowe), - topograficzne: wojskowe, studialno-planistyczne (średnio i małoskalowe), - tematyczne: hydrograficzne, sozologiczne, turystyczne, ochrony środowiska i in. - ogólno-geograficzne TECHNOLOGIE MAP: - klasyczna (analogowa), - cyfrowe: wektorowe, rastrowe (z przetworzenia map analogowych lub zdjęć lotniczych - ortofotomapy), hybrydowe 13

14 14
15 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 1: Wprowadzenie do przedmiotu DZIAŁY SPECJALNE GEODEZJI GEODEZJA WYŻSZA: badania kształtu i wymiarów ziemi jako planety, jej pól fizycznych, w tym pola grawitacyjnego i ruchu obrotowego; globalne układy odniesień przestrzennych, geodezyjne osnowy podstawowe; obejmuje: GEODEZJĘ FIZYCZNĄ, w tym GRAWIMETRIĘ, ASTRONOMIĘ GEODEZYJNĄ, GEODEZJĘ SATELITARNĄ. GEODEZJA SZCZEGÓŁOWA: techniki i metody pomiarów, osnowy szczegółowe, technologie map. KARTOGRAFIA: teoria odwzorowań kartograficznych; zasady opracowania, redagowania i reprodukowania map; obejmuje (podziały): KARTOGRAFIĘ MATEMATYCZNĄ, KARTOGRAFIĘ NUMERYCZNĄ, REDAKCJĘ MAP I REPRODUKCJĘ TOPOGRAFIA: tworzenie map w skalach 1:25000, 1:50000, 1: ze szczególnym uwzględnieniem zobrazowań powierzchni topograficznej. FOTOGRAMETRIA I TELEDETEKCJA: pozyskiwanie i przetwarzanie danych ze zdjęć lotniczych, naziemnych lub satelitarnych. GEODEZJA INŻYNIERYJNO-PRZEMYSŁOWA: pomiary realizacyjne i specjalne; GEODEZJA ROLNA I GOSPODARKA NIERUCHOMOŚCIAMI: ewidencja gruntów i budynków, urządzenia terenów rolnych, podziały nieruchomości, scalenia gruntów, projekty melioracji. GEODEZJA GÓRNICZA: wykonywanie map górniczych, tyczenie wrobisk podziemnych, pomiary deformacji powierzchni i górotworu, pomiary pionowości szybów, określanie szkód górniczych TECHNIKI POMIAROWE I METODY OBLICZEŃ, INFORMATYKA GEODEZYJNA 15
16 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia TEMAT 2: GLOBALNE POWIERZCHNIE I UKŁADY ODNIESIENIA Powierzchnie ekwipotencjalne, geoida, elipsoida Charakterystyka rzeczywistego (naturalnego) pola grawitacyjnego Ziemi Pole potencjalne rzeczywiste i normalne Definicja wysokości normalnej i elipsoidalnej Elipsoida obrotowa jako matematyczny model Ziemi Elipsoidalny i kartezjański układ współrzędnych Najbardziej znane elipsoidy odniesienia Położenie wzajemne różnych elipsoid odniesienia Powierzchnie odniesienia na przekroju Numeryczny model polskiej quasigeoidy 16
17 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia Powierzchnie ekwipotencjalne, geoida, elipsoida W+dW =const. W=const. W o = U o U o (model matematyczny Ziemi) W potencjał rzeczywisty U potencjał normalny (matematyczny, jednorodnej elipsoidy ziemskiej) geoida ustalona powierzchnia ekwipotencjalna (pozioma), przechodząca przez średni poziom mórz i oceanów (w Polsce przyjęto średni poziom Morza Bałtyckiego mierzonego mareografem w Kronstadt w Fed. Ros. ) 17
 pola potencjalnego Ziemi Geoida powierzchnia ekwipotencjalna przechodząca przez określony średni poziom")
 / g s g s - średnia wartość przyśpieszenia ziemskiego na odcinku linii pionu.")
18 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia Charakterystyka rzeczywistego (naturalnego) pola potencjalnego Ziemi Geoida powierzchnia ekwipotencjalna przechodząca przez określony średni poziom mórz i oceanów. W Polsce przyjmuje się średni poziom morza Bałtyckiego, mierzony mareografem w Kronstadt (Fed. Ros.). Układy: Kronsztad 60, Kronsztad 86 lub 2006 (różnice poziomów: kilka cm). Wysokość ortometryczna H ort : długość odcinka linii pionu od punktu do geoidy. Definicja fizyczna: H ort = (W o W P ) / g s g s - średnia wartość przyśpieszenia ziemskiego na odcinku linii pionu. Quasi-równoległość dwóch powierzchni ekwipotencjalnych: g 1 h 1 = g 2 h 2 g 1, g 2 przyśpieszenie w dwóch różnych punktach 1, 2 powierzchni ekwipotencjalnej, h 1, h 2 odstępy (zmiany wysokości) bliskich sobie powierzchni w punktach 1, 2 18
 g Gradient potencjału")
19 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia Pole potencjalne rzeczywiste i normalne (elipsoidy ekwipotencjalnej o potencjale U o równym potencjałowi geoidy W o ) g Gradient potencjału rzeczywistego = wektor przyśpieszenia g Gradient potencjału normalnego = wektor przyśpieszenia normalnego Potencjał zakłócający (anomalny): T = W U (różnica pomiędzy potencjałem rzeczywistym i normalnym w określonym punkcie przestrzeni). 19

20 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia Definicja wysokości normalnej H n i elipsoidalnej H e Telluroida obraz powierzchni topograficznej w polu normalnym (potencjał normalny na telluroidzie równa się potencjałowi rzeczywistemu na powierzchni Ziemi w odpowiadających punktach S, P leżących na tej samej normalnej do elipsoidy. Wysokość normalna punktu P odległość odpowiadającego punktu S telluroidy od elipsoidy. Definicja fizyczna: H n = [W(G) W(P)] / s = [ U(O) U(S)] / s s - przeciętna wartość przyśpieszenia normalnego na odcinku O-S Wysokość elipsoidalna H e = odległość punktu od elipsoidy. Wysokości elipsoidalne wyznacza się w technice GPS. Różnica pomiędzy wysokością elipsoidalną a normalną nazywa się anomalią wysokości i oznacza literą = H e H n Różnica pomiędzy wysokością elipsoidalną a ortometryczną nazywa się wysokością lub undulacją geoidy N = H e H o Przesuwając w pionie odcinek wysokości normalnej z punktu S do punktu P spodek odcinka wyznaczy powierzchnię zwaną quasi-geoidą. W Polsce quasi-geoida przebiega blisko geoidy: na poziomie morza nie ma różnicy, natomiast w górach odchylenie nie przekracza 20 cm. W Polsce obowiązuje system wysokości normalnych 20
21 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia ELIPSOIDA OBROTOWA JAKO MATEMATYCZNY MODEL ZIEMI Z Grenwich Y X spłaszczenie (f) i mimośród (e) Elipsoida WGS84 (GRS80): a = b = ,314 e 2 = f = 1: Ekliptyka (E) (E,R)=23 o 5 (E) (R) = linia punktów równonocy: P. Barana (wiosna) P. Wagi (jesień) 21
22 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia ELIPSOIDALNY I KARTEZJAŃSKI UKŁAD WSPÓŁRZĘDNYCH Współrzędne geograficzne - geodezyjne i wysokość elipsoidalna: B (lub ), L (lub ), h Współrzędne kartezjańskie - geocentryczne: X, Y, Z Przekształcenie (BLH) (XYZ): X = (R N + h) cos (B) cos (L) Y = (R N + h) cos (B) sin (L) Z = [ R N (1 e 2 ) + h ] sin (B) R N promień krzywizny przekroju pierwszego wertykału (prostopadłego do południka): R N = a / [ 1 e 2 sin 2 (B) ] 1/2 a półoś równikowa elipsoidy e pierwszy mimośród e 2 = 1 b 2 / a 2 dla GRS-80: e 2 = 0, Przekształcenie odwrotne (XYZ) (BLh) zazwyczaj wykonuje się metodą iteracyjną Precyzja: 1 (db) ~ 30m; 1 (dl) ~ 20m (dla średniej szerokości geograficznej obszaru Polski B = 52 o ). Dokładność nawigacji samochodowej GPS: 0.1 ~ 3m Względne pomiary GPS w geodezji możliwe z precyzją ~ 0.03m m 22
23 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia PRZEKSZTAŁCENIE ODWROTNE: ( X, Y, Z ) (B, L, h) Metody jednokrokowe (pseudo-dokładne) Przykładowo (Bowring, 1976) metoda przybliżona ale z mało istotnym błędem obcięcia: 0. Dane: a, b - półosie elipsoidy; X, Y, Z współrzędne kartezjańskie geocentryczne punktu. a Z 1. Obliczamy pomocnicze wielkości: p = X 2 +Y 2 ; = arctg ; b p Z + e 2 2 b sin 3 ( ) 2. B = arctg ; e 1, e 2 pierwszy i drugi mimośród elipsoidy p e 1 2 a cos 3 ( ) [ e 1 2 = (a 2 b 2 ) / a 2, e 2 2 = ( a 2 b 2 ) / b 2 ] 3. L = arcsin (Y / p) = arccos (X / p); 4. h = p / cos(b) R N jeśli B 100 g lub h = Z / sin(b) R N (1 e 1 2 ) dla B 0 [ R N = a / [ 1 e 2 sin 2 (B) ] 1/2 ] Metody iteracyjne Polegają m.in. na utworzeniu jednego równania nieliniowego z jedną niewiadomą (z trzech zależności podstawowych rugujemy dwie niewiadome, np. L i h otrzymując równanie na B). Ogólnie może to być równanie postaci: f(b) = 0, które rozwiązuje się zwykle metodą Newtona, czyli według formuły: B (k+1) = B (k) f (B (k) ) / f (B (k) ) ; k = 0, 1, 2,. Jako wartość startową przyjmuje się B (o) = arctg (Z / X 2 +Y 2 ). Dostatecznie dokładne wyniki otrzymuje się na ogół już po 2 3 iteracjach. 23
 (X, Y, Z) ID B L h o o [m] 1 50 00 00.0000 16 00 00.0000 300.000 2 54 00 00.0000 16 00 00.0000 100.000 3 54 00 00.0000 22 00 00.0000 100.000 4 50 00 00.")
24 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia Ćwiczenie rachunkowe Przykłady przekształceń współrzędnych: (B, L, h) (X, Y, Z) ID B L h o o [m] przekształcenia wprost: X = (R N + h) cos (B) cos (L) Y = (R N + h) cos (B) sin (L) Z = [ R N (1 e 2 ) + h ] sin (B) gdzie (elipsoida GRS80): R N = a / [ 1 e 2 sin2 (B) ] 1/2 e 2 = 1 b 2 / a 2 ; a = , e 2 = ID B L h o o [m] przekształcenie odwrotne, jednokrokowe (Bowring, 1976) ID x y z [m] [m] [m] Oszacowane empirycznie błędy numeryczne: e B, e L < , e H < m 24
25 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia PARAMETRY NAJBARDZIEJ ZNANYCH ELIPSOID ODNIESIENIA Elipsoida odniesienia a [m] b [m] e 2 = (a 2 - b 2 )/a 2 ( e = mimośród) 1 : f [ f = (a - b)/a = spłaszczenie ] EVEREST , ,41 0, ,8017 BESSEL , ,96 0, , CLARKE , ,8 0, , HAYFORD 1909 KRASOWSKI , , ,019 0, ,3 WGS ,52 0, ,26 WGS-84 (GRS80) ,314 0, ,
 PARAMETRY")
![TRANSFORMACJI XYZ [GRS80] XYZ [Krasowski] Kąty obrotów osiowych: e x = 1.7388854 10 6 [rad], e y = 0.2561460 10 6 [rad], e z = 4.](/docs-images/67/57390734/images/26-1.jpg "0896031 10 6 [rad], Zmiana skali: s = 0.8407728 10 6 = 0.84 [ mm / km ] Składowe przesunięcia: T x = 33.430 [m], T y = 146.575 [m], T z = 76.")
26 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia POŁOŻENIE WZAJEMNE ELIPSOID ODNIESIENIA: Krasowskiego i WGS-84 (GRS-80) PARAMETRY TRANSFORMACJI XYZ [GRS80] XYZ [Krasowski] Kąty obrotów osiowych: e x = [rad], e y = [rad], e z = [rad], Zmiana skali: s = = 0.84 [ mm / km ] Składowe przesunięcia: T x = [m], T y = [m], T z = [m] Wzór transformacji w notacji macierzowej: X K 1 e z e y X G T x Y K = (1+ s) e z 1 e x Y G + T y Z K e y e x 1 Z G T z 26
 h H H h =")
27 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia POWIERZCHNIE ODNIESIENIA NA PRZEKROJU powierzchnia topograficzna Oznaczenia: = odstęp quasi-geoidy od elipsoidy (anomalia wysokości) h H H h = wysokość normalna punktu = H + = wysokość elipsoidalna quasi-geoida Dla obecnie stosowanej elipsoidy międzynarodowej WGS-84(GRS-80) anomalie wysokości w obszarze Polski mieszczą się w przedziale od 25 m do 45 m, przeciętnie ok. 34m elipsoida Wysokości elipsoidalne (h) uzyskuje się np. przy pozycjonowaniu techniką GPS. Chcąc otrzymać dalej wysokość normalną (H = h ) potrzeba znać w danym miejscu anomalię. Otrzymuje się ją z tzw. numerycznego modelu quasi-geoidy (por. następna strona tematu) 27
28 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 2: Globalne powierzchnie i układy odniesienia NUMERYCZNY MODEL POLSKIEJ QUASIGEOIDY (GEOIDY) PL- geoid-2011 Mapa izolinii odstępów quasigeoidy od elipsoidy GRS80 (WGS84) w [m] Różne modele quasi-geoidy (geoidy) są dostępne w formie siatki punktów o rozdzielczości 0.01 o x 0.01 o { (B ij,l ij, ij ): i =0,1,2,, n; j =0,1,2,, m } - odstęp quasi-geoidy od elipsoidy w węźle siatki B, L współrzędne geodezyjne węzła siatki. Modele te stosuje się w zadaniach tzw. niwelacji satelitarnej. Interpolacja w oczku siatki i+1,j o i+1,j+1 B i,j L i,j+1 28
29 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. TEMAT 3: ODWZOROWANIA KARTOGRAFICZNE I UKŁADY WSPÓŁRZĘDNYCH NA PŁASZCZYŹNIE Zasady i klasyfikacje odwzorowań kartograficznych Odwzorowanie normalne, walcowe, wiernokątne (Mercatora) Mapa Europy w odwzorowaniu stożkowym normalnym Podstawowe typy odwzorowań stosowane w Polsce do tworzenia kartograficznych (płaskich) układów współrzędnych Co znaczy odwzorowanie wiernokątne? Strefy państwowego układu współrzędnych 1965 jako odwzorowania elipsoidy Krasowskiego w systemie Pułkowo 42 Parametry państwowego układu współrzędnych 1992 Izolinie elementarnych zniekształceń długości w układzie 1992 Czterostrefowy, państwowy układ współrzędnych płaskich 2000 Przykład godła sekcji mapy w układzie 2000 Układ Obraz sekcji 1:10000 na styku stref 29
, y = g (B, L) przekształcających")
.")
30 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. ZASADY I KLASYFIKACJE ODWZOROWAŃ KARTOGRAFICZNYCH Odwzorowania powierzchni elipsoidy na płaszczyźnie wyrażają się ogólnie za pomocą pewnych funkcji: x = f (B, L), y = g (B, L) przekształcających punkt na elipsoidzie o współrzędnych (B, L), w punkt płaszczyzny o współrzędnych (x,y) w ustalonym na tej płaszczyźnie układzie kartezjańskim. Zazwyczaj funkcjom odwzorowawczym odpowiada interpretacja geometryczna oznaczająca rzutowanie powierzchni elipsoidy na płaszczyznę lub powierzchnię rozwijalną na płaszczyźnie (walcową, stożkową). Istnieją też odwzorowania zdefiniowane tylko analityczne (nie mające podobnej interpretacji geometrycznej). Zwykle są to odwzorowania ukierunkowane na minimalizację zniekształceń długości w określonych obszarach powierzchni elipsoidy. Klasyfikacja ogólna odwzorowań kartograficznych: Według rodzaju zniekształceń WIERNOKĄTNE, WIERNOPOLOWE WIERNOODLEGŁOŚCIOWE (w ustalonym kierunku) Według typu powierzchni rozwijalnej na płaszczyznę PŁASZCZYZNOWE STOŻKOWE WALCOWE ANALITYCZNE Według ułożenia powierzchni względem elipsoidy obrotowej NORMALNE, POPRZECZNE UKOŚNE (DOWOLNE) Przykłady: STOŻKOWE NORMALNE WALCOWE NORMALNE PŁASZCZYZNOWE UKOŚNE 30
 Loksodroma krzywa przecinająca południki pod stałym kątem.")

31 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. ODWZOROWANIE NORMALNE WALCOWE WIERNOKĄTNE (MERCATORA) Loksodroma krzywa przecinająca południki pod stałym kątem. W odwzorowaniu Mercatora obrazem loksodromy jest linia prosta. Ten rodzaj odwzorowania służył do wykonywania morskich map nawigacyjnych. Odcinek prostej określał trasę płynięcia pod stałym azymutem. Loksodroma nie określa jednak trasy najkrótszej na elipsoidzie. Najkrótszą trasę wyznacza krzywa zwana ortodromą, geodetyką lub linią geodezyjną. Źródło: plik Mercator-proj.jpg w de.wikipedia 31

32 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. MAPA EUROPY W ODWZOROWANIU STOŻKOWYM NORMALNYM Obrazy równoleżników są okręgami Obrazy południków - liniami prostymi przecinającymi się w biegunie Źródło: plik Stroomgebied1.jpg w nl.wikipedia, autor: Andre Engels 32


33 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. SIATKI KARTOGRAFICZNE (OBRAZY POŁUDNIKÓW I RÓWNOLEŻNIKÓW) W NIEKTÓRYCH ODWZOROWANIACH SFERY LUB ELIPSOIDY ZIEMSKIEJ Odwzorowania płaszczyznowe normalne: ortogonalne stereograficzne (o. sfery) Odwzorowania walcowe: poprzeczne, normalne 33
34 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. SIATKI KARTOGRAFICZNE (OBRAZY POŁUDNIKÓW I RÓWNOLEŻNIKÓW) W NIEKTÓRYCH ODWZOROWANIACH SFERY LUB ELIPSOIDY ZIEMSKIEJ c.d. Odwzorowania stożkowe normalne: Inne (analityczne): Odwzorowania kartograficzne mogą być zdefiniowane pewnymi wzorami, niekoniecznie jako rzutowanie na powierzchnie rozwijalne, lecz zwykle przy założeniu warunków specjalnych, np. minimalizacji zniekształceń długości w określonym obszarze powierzchni Ziemi. Przykładem odwzorowania tego typu jest odwzorowanie wiernokątne (analityczne), o nazwie PUK (Polski Układ Kartograficzny), skonstruowane przy warunku minimalizacji zniekształceń długości w obszarze Polski, które opracowano specjalnie dla tworzenia map branżowych polskiego gazownictwa. Będzie one zaprezentowane w dalszej części wykładów. 34
35 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. CO ZNACZY ODWZOROWANIE WIERNOKĄTNE? Odwzorowanie wiernokątne oznacza, że spełniony jest warunek = (równość kąta pomiędzy odwzorowanymi łukami krzywych z kątem pomiędzy krzywymi oryginalnymi na elipsoidzie). Natomiast na ogół jest, gdzie jest kątem między cięciwami. Różnica = - nazywa się poprawką lub redukcją odwzorowawczą kąta 35
 UKŁADÓW WSPÓŁRZĘDNYCH ODWZOROWANIE PŁASZCZYZNOWE WIERNOKĄTNE (QUASI - STEREOGRAFICZNE) ODWZOROWANIE")

36 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. PODSTAWOWE TYPY ODWZOROWAŃ STOSOWANE W POLSCE DO TWORZENIA KARTOGRAFICZNYCH (PŁASKICH) UKŁADÓW WSPÓŁRZĘDNYCH ODWZOROWANIE PŁASZCZYZNOWE WIERNOKĄTNE (QUASI - STEREOGRAFICZNE) ODWZOROWANIE (GAUSSA-KRÜGERA) WALCOWE POPRZECZNE WIERNOKĄTNE realizowane w trzech etapach przekształceń: 1 (B, L) (, ) 3 2 S (X GK,Y GK ) (X MERC, Y MERC ) Środek rzutów S na normalnej do elipsoidy w odległości równej podwójnej długości średniego promienia krzywizny elipsoidy w punkcie głównym. Etap1: wiernokątne przekształcenie elipsoidy na sferę Etap2: poprzeczne odwzorowanie Mercatora Etap3: przekształcenie płaszczyzny Mercatora na 36 płaszczyznę Gaussa-Krügera
37 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. ODWZOROWANIE GAUSSA KRÜGERA (B, L) ( x GK, y GK ), L=L L o, L o - południk osiowy strefy. Parametry liczbowe określone są dla elipsoidy GRS80 / WGS-84. Algorytm przekształcenia wprost Algorytm przekształcenia odwrotnego Opis etapu (B, L) ( x GK, y GK ) ( x GK, y GK ) (B, L) [ 1 ] [ 3 ] Lagrange a: (B, L) (, ) Lagrange a: (, ) (B, L) U = 1 e sin(b), V=1+e sin (B) B = + c 2 sin(2 )+ c 4 sin(4 ) + K = ( U/V ) e/2, C= K tg (B/2+ /4) + c 6 sin(6 )+... =2 arc tg (C) /2 c 2 = c 4 = = L (przyrost względem L o ) c 6 = e = L = [ 2 ] [ 2 ] Mercatora: (, ) (x MERC, y MERC ) Mercatora: (x MERC, y MERC ) (, ) p = sin( ), q = cos( ) cos ( ) = x MERC /R o, = y MERC /R o r = 1+ cos( ) sin( ) w = 2 arc tg [ exp( ) ] /2 s = 1 cos( ) sin ( ) = arc sin [ cos(w) sin ( )] Przekształcenie konforemne (Lagrange a) elipsoidy na sferę i odwrotne e 2 = (a 2 -b 2 )/a 2 (kwadrat pierwszego mimośrodu) Odwzorowanie Mercatora (walcowe, poprzeczne, wiernokątne) sfery na płaszczyznę i odwrotne x MERC = R o arc tg (p/q) y MERC = (½) R o ln (r/s) R o = = arc tg [ tg(w) / cos( )] R o promień sfery Lagrange a [ 3 ] [ 1 ] (x MERC, y MERC ) (x GK, y GK ) (x GK, y GK ) (x MERC, y MERC ) z = [ (x MERC x O ) s, y MERC s ] z = [(x GK a o ) s, y GK s ] X O = a 0 = z GK = a 0 +z(a 1 + z(a 2 + z(a 3 + z MERC = b 0 +z(b 1 + z(b 2 + z(b z(a 4 +z(a 5 + z (a 6 + )))))) + z(b 4 + z(b 5 + z (b 6 + )))))) z GK = ( x GK, y GK ) z MERC = ( x MERC, y MERC ) s = współczynnik skalujący = s = współczynnik skalujący = Parametry wielomianu zespolonego: Parametry wielomianu zespolonego: a 0 = b 0 = a 1 = a 2 = b 1 = b 2 = a 3 = a 4 = b 3 = b 4 = a 5 = a 6 = b 5 = b 6 = Przekształcenie płaszczyzny Mercatora na płaszczyznę Gaussa-Krügera i odwrotnie. Tu zastosowano zespolone wielomiany algebraiczne, jakkolwiek formuły oryginalne stosują zespolone wielomiany trygonometryczne. 37


38 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. STREFY PAŃSTWOWEGO UKŁADU WSPÓŁRZĘDNYCH 1965 JAKO ODWZOROWANIA ELIPSOIDY KRASOWSKIEGO W SYSTEMIE PUŁKOWO 42 I,II,III,IV odwzorowanie płaszczyznowe (quasi-stereograficzne) V odwzorowanie walcowe - poprzeczne - wiernokątne (Gaussa-Krügera) Izolinie elementarnych zniekształceń długości w strefie I liczone w [cm/km] Objaśnienie: w czterech strefach odwzorowania quasi-stereograficznego zastosowano skalę kurczenia obrazu m o = Dlatego w środku strefy elementarne zniekształcenie długości wynosi - 20 [cm/km] 38


39 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. PARAMETRY PAŃSTWOWEGO UKŁADU WSPÓŁRZĘDNYCH JEDNOSTREFOWEGO ODWZOROWANIA GAUSSA-KRÜGERA ELIPSOIDY GRS80 W OBSZARZE POLSKI Skala 1:10000 Fragment mapy z PZGK UKŁAD PRZEZNACZONY DO OPRACOWAŃ MAP TOPOGRAFICZNYCH 39
 Ze względu na duże wartości elementarnych zniekształceń długości, układ 1992 przeznaczony jest tylko do")
40 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. IZOLINIE ELEMENTARNYCH ZNIEKSZTAŁCEŃ DŁUGOŚCI W UKŁADZIE 1992 (opis izolinii w [cm/km] ) Ze względu na duże wartości elementarnych zniekształceń długości, układ 1992 przeznaczony jest tylko do opracowań map w skalach 1:10000 i mniejszych Objaśnienie: zniekształcenie na południku osiowym -70 [cm/km] wynika z założonej skali kurczenia obrazu m o = względem oryginalnego odwzorowania Gaussa-Krügera 40
 i 6 o słupy (długości geograficznej geodezyjnej), niezależnie od jakiegoś odwzorowania.")
41 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. Podział Ziemi na 4 o pasy (szerokości geograficznej geodezyjnej) i 6 o słupy (długości geograficznej geodezyjnej), niezależnie od jakiegoś odwzorowania. Pasy oznaczone literami A V, od równika do bieguna, niezależnie dla części północnej (N) i południowej (S). Słupy oznaczone liczbami naturalnymi od 1 do 60 z zachodu na wschód, rozpoczynając od pasa pomiędzy południkami 180 o, 186 o. Oznaczenie [pas]-[słup] jest identyfikatorem (godłem) pola (sekcji) mapy w skali 1 : W polach N-33, N-34, M-33, M-34 oraz nieznacznie w polu M-35 mieści się obszar Polski Przykładowa ilustracja tematu na prostokątnej siatce kartograficznej: PL 41
42 pasy R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. Sekcje podziałowe mapy globu 1: dla obszaru Polski N słupy N-33 N-34 Godło sekcji mapy 1: o 52 o M ( 4 o ) ~ 430 km M-33 M-34 M-35 ~ 445 km ( 6 o ) 48 o 12 o 18 o 24 o 30 o 42

43 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. Podział sekcji mapy 1 : na 144 sekcje mapy 1 : przykład M-34 37km 37km Wymiar sekcji mapy w skali 1: w przybliżeniu 37 x 37 [cm] Przykładowa sekcja mapy dla skali 1: , której godło ma postać: M
44 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. Podział sekcji mapy skali 1: (ilustracja na przykładzie sekcji M-34-56) na sekcje w skalach: 1:50 000, 1: , 1: Tworzenie godła odpowiednio do hierarchii w strukturze podziału sekcji 1: Baranów Sandomierski Samborzec a Koprzywnica c a c A C b TARNOBRZEG d b d 56 a c a Nowa Dęba c Majdan Królewski B D Zaleszany b Grębów d b Bojanów 1 2 d Przykład godła sekcji dla różnych skal M D-d-4 5 1: : : :
45 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. CZTEROSTREFOWY, PAŃSTWOWY UKŁAD WSPÓŁRZĘDNYCH PŁASKICH 2000 Charakterystyka układu 2000 : W każdej strefie jest zastosowane odwzorowanie Gaussa-Krügera dla określonych południków osiowych styczności walca z elipsoidą GRS80: L o : 15 o, 18 o, 21 o, 24 o. 15 o 18 o Źródło: plik powiaty_puwg2000.pgn w pl.wikipedia.org 21 o 24 o Układ przeznaczony do opracowań map gospodarczych w skalach: 1: 500, 1: 1000, 1: 2000 Granicami stref są z założenia granice powiatów. Zniekształcenia długości: od -7.7 do (max.) ok. + 8 cm/km (skala kurczenia obrazu na każdym południku osiowym wynosi m o = ) Układ współrzędnych na płaszczyźnie X = m o * X GK Y = m o * Y GK c*10 6 gdzie: c = L o / 3 o, identyfikator strefy, wynosi odpowiednio: 5, 6, 7, 8, X GK,Y GK - oryginalne współrzędne odwzorowania (osie układu są obrazami południka osiowego i równika 45

46 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. PRZYKŁAD GODŁA SEKCJI MAPY W UKŁADZIE 2000 DLA STREFY Z POŁUDNIKIEM OSIOWYM L o = 21 o I IDENTYFIKATOREM c = 7 Godło sekcji mapy w skali 1:10000 Podział sekcji 1:10000 na 25 sekcji 1:2000 Obszar strefy 5km 8km * 5km Punkt początkowy strefy Xo= Yo= * 8km 1km km Godło: km 1: m 1:500 Sekcja 1:2000 dzieli się na 4 sekcje 1:1000, a każda sekcja 1:1000 dzieli się na 4 sekcje 1:500: 0.5km m Godło: Godło:
, 8( L o = 24 o ) granica stref układu 2000 powiat łańcucki powiat")
47 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. Układ Obraz sekcji 1:10000 na styku stref 7( L o =21 o ), 8( L o = 24 o ) granica stref układu 2000 powiat łańcucki powiat przeworski 47

48 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. Układ sekcji mapy w skali 1:500 układu 2000 na tle sekcji dawnego układu lokalnego miasta RZESZÓW wycinek obszaru miasta 48
 UKŁAD JEDNOSTREFOWY, ODWZOROWANIE ANALITYCZNE (KONFOREMNE), ELEMENTARNE ZNIEKSZTAŁCENIA DŁUGOŚCI: od")
49 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. UKŁAD PUK_2000 (dla map branżowych gazownictwa) UKŁAD JEDNOSTREFOWY, ODWZOROWANIE ANALITYCZNE (KONFOREMNE), ELEMENTARNE ZNIEKSZTAŁCENIA DŁUGOŚCI: od -36 do 40 cm/km 49
50 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. Płaski, prostokątny układ współrzędnych (płaski układ kartezjański) w geodezji jako układ prawoskrętny = kąt kierunkowy (azymut topograficzny) A g = azymut geodezyjny = + = zbieżność południków (konwergencja) x A g y x obraz południka elipsoidy styczna do obrazu południka y y x Układ matematyczny (lewoskrętny) 50
 ODNIESIEŃ UKŁADY WSPÓŁRZĘD- NYCH LOKALNE UKŁADY ODNIESIENIA ZREALIZOWANE")
51 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. ODWZOROWANIA, UKŁADY WSPÓŁRZĘDNYCH I UKŁADY ODNIESIENIA OGÓLNE SCHEMATY PRZEJŚĆ TRANSFORMACYJNYCH SYSTEMY (GLOBALNE UKŁADY) ODNIESIEŃ UKŁADY WSPÓŁRZĘD- NYCH LOKALNE UKŁADY ODNIESIENIA ZREALIZOWANE PRZEZ OSNOWY GEODEZYJNE 2000 LOKALNE 1965 Błędy globalne I lokalne 51
52 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne i układy współrzędnych na płaszczyźnie. WPŁYW ZMIAN WYSOKOŚCI NA TRANSFORMACJE PUNKTÓW POMIĘDZY SYSTEMAMI: PUŁKOWO 42 i ETRF 89 ok. 0.24mm/10m 52
53 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne MAPA JAKO PRODUKT FINALNY PROCESÓW GEODEZYJNYCH (ODWZOROWANIE STRUKTURY POWIERZCHNI ZIEMI I ZWIĄZANYCH Z NIĄ OBIEKTÓW NA PŁASZCZYŹNIE, ZOBRAZOWANE W UMOWNEJ SKALI) D D e = (H+N) D / R Przykład: dla D=10km, H = 300m, N=34m, R=6370km D D e = 0.52 m (skrócenie długości na elipsoidzie) Powierzchnia topograficzna H D Geoida Lokalna redukcja wysokościowa długości (lokalna zmiana skali obiektu) N geoida Matematyczna powierzchnia odniesienia (elipsoida) Płaszczyzna odwzorowania Funkcje odwzorowawcze; lokalne zniekształcenie długości σ [cm/km] D e D o elipsoida Płaszczyzna mapy Przekształcenie przez podobieństwo według skali 1 : M, np.. 1 : : M = D m : D o (skala mapy) D m 53
54 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 3: Odwzorowania kartograficzne Ćwiczenie rachunkowe 3.1. Zniekształcenia długości na mapie Dane: W terenie wybrano dwa charakterystyczne punkty P, Q, a następnie zidentyfikowano je na mapie danego obszaru wykonanej w pewnym odwzorowaniu o wiadomych parametrach. Odpowiadające punktom P, Q obrazy na elipsoidzie odniesienia oznaczmy P, Q, zaś na płaszczyźnie odwzorowawczej P, Q. Pomierzona w terenie odległość punktów wynosi P Q = m. Pytanie: Ile powinna wynosić odległość P Q pomiędzy odpowiadającymi punktami P, Q w układzie współrzędnych mapy jeśli wiadomo, że w danym obszarze średnie, elementarne, zniekształcenie odwzorowawcze długości wynosi = [cm / km] = [m / m], średnia wysokość terenu n.p.m. H = 335 m zaś średni odstęp quasi-geoidy od elipsoidy = 38 m. H+ P Q H P Q R s Rozwiązanie: P Q = ( P Q + H+ + o ) = ( ) = = [m] gdzie: H+ = PQ (H + ) R s 1 = = ( ) / = = m = redukcja wysokościowa R s m przybliżony promień Ziemi o = PQ [m] [m/m] = ( ) [m] = m = redukcja odwzorowawcza Redukcja wysokościowa wynika z proporcji uproszczonej: H+ / (H+ ) = PQ / (Rs+H+ ) PQ / R s Przyjmuje znak algebraiczny przeciwny do znaku wysokości elipsoidalnej h = H + 54
55 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne Temat 4: UKŁADY ODNIESIENIA OSNOWY I SIECI GEODEZYJNE Definicje podstawowe Sposoby stabilizacji (materializacji) punktów geodezyjnych Osnowa geodezyjna 0 rzędu: EUREF-POL + POLREF Osnowa i sieć I klasy o strukturze triangulacyjnej Stacje referencyjne satelitarnego systemu ASG-EUPOS Serwisy pozycjonowania ASG-EUPOS Przykłady sieci i osnów II i III klasy Klasyfikacja osnów i sieci geodezyjnych Przykłady sieci o różnych kształtach Objaśnienie funkcji osnowy geodezyjnej i metod pomiarów sytuacyjnych Konstrukcje elementarne sieci geodezyjnych (wcięcia) Niezawodność układu obserwacyjnego 55
56 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne DEFINICJE PODSTAWOWE GEODEZYJNY UKŁAD ODNIESIENIA: POWIĄZANIE MATEMATYCZNEGO UKŁADU WSPÓŁRZĘDNYCH Z FIZYCZNĄ ZIEMIĄ LUB Z JEJ TRWAŁYMI OBIEKTAMI. POWIĄZANIE TO DOKONUJE SIĘ POPRZEZ PUNKTY OSNÓW GEODEZYJNYCH PUNKT GEODEZYJNY: ZMATERIALIZOWANY (STABILIZOWANY, MARKOWANY, OZNACZONY MATERIALNIE NA POWIERZCHNI ZIEMI LUB NA OBIEKTACH Z NIĄ ZWIĄZANYCH) PUNKT PRZESTRZENI (ZNAK FIZYCZNY) + PRZYPORZĄDKOWANY MU ZBIÓR INFORMACJI LOKACYJNYCH I OPISOWYCH: - Współrzędne w przyjętym układzie odniesienia; parametry określające dokładność - Nazwa (numer) punktu, cechy klasyfikacyjne - Inne dane lokacyjne, numeryczne, graficzne i opisowe - Rok założenia, autor (wykonawca) OSNOWA GEODEZYJNA: ZBIÓR PUNKTÓW GEODEZYJNYCH SIEĆ GEODEZYJNA (UKŁAD OBSERWACYJNY): UKLAD MIERZONYCH ELEMENTÓW GEOMETRYCZNYCH (KĄTÓW, DŁUGOŚCI, RÓŻNIC WYSOKOŚCI) SŁUŻĄCY WYZNACZENIU WSPÓŁRZĘDNYCH PUNKTÓW GEODEZYJNYCH W UMOWNYM UKŁADZIE TECHNIKI POMIAROWE: KLASYCZNE ( TEODOLIT, DALMIERZ, NIWELATOR ), SATELITARNE (ODBIORNIKI GNSS), FOTOGRAMETRYCZNE I INNE (KAMERY CYFROWE, SKANERY LASEROWE) 56
57 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne SPOSOBY STABILIZACJI (MATERIALIZACJI) PUNKTÓW GEODEZYJNYCH RODZAJE ZNAKÓW - PRZYKŁADY: - słup betonowy wkopany w ziemię z widoczną i dostępną głowicą z centrem; dodatkowe zabezpieczenie znakiem podziemnym w postaci płytki z wyrytym krzyżem, - nadziemna zabudowa wieżowa, drewniana, lub metalowa, znaku naziemnego, sygnalizująca cel (obecnie nie stosowana ze względu na zastosowanie techniki GPS) - trzpień metalowy zakotwiczony w ścianie budowli lub skale z wystającą głowicą (typowa dla punktów osnów wysokościowych tzw. reperów) lub tarczą celowniczą, - wieża (kościelna, telekomunikacyjna, ratuszowa), jako obiekt innego przeznaczenia, - palik wbity w ziemię z gwoździem identyfikującym punkt (markowanie tymczasowe) - inne sygnalizacje specjalne. LOKALIZACJE: NAZIEMNA, NADZIEMNA, PODZIEMNA, ŚCIENNA, WYSOKA słup betonwy z rurką trzpień w chodniku H tarcza celownicza na ścianie front. palik drewniany reper płytka podziemna 57
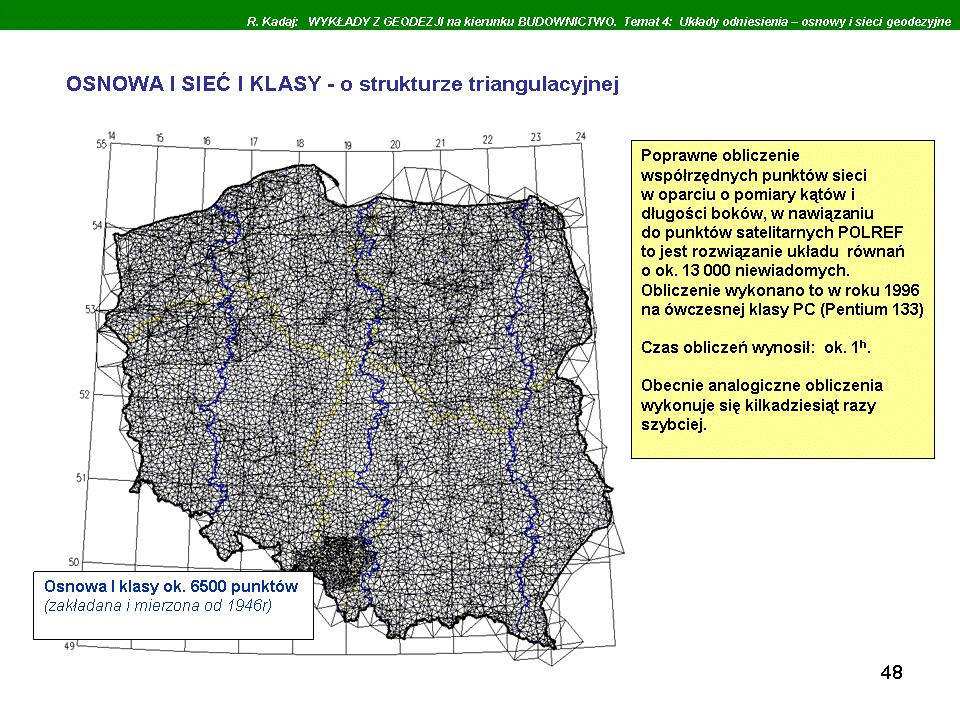
58 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne OPIS TOPOGRAFICZNY PUNKTU GEODEZYJNEGO - PRZYKŁAD Źródło: PODGIK w Olsztynie 58

59 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne OSNOWA GEODEZYJNA 0 RZĘDU: EUREF-POL + POLREF Charakterystyka: Utworzona w latach techniką statycznych pomiarów GPS w nawiązaniu do stacji zachodnio-europejskich jako osnowa trójwymiarowa Punkty osnowy reprezentują europejski układ odniesienia ETRF 89 (European Terrestrial Reference Frame) Dla każdego punktu są określone współrzędne w układach globalnych (B,L,H), (X,Y,Z) i w obowiązujących układach płaskich (1992, 2000) a także wysokości normalne w układzie Kronsztad 86 Osnowa geodezyjna 0 rzędu: EUREF-POL (11 punktów) + POLREF (348 punktów) Średniokwadratowe błędności współrzędnych, dla każdej składowej, rzędu 2 3 cm punkt sieci POLREF punkt sieci EUREF-POL Objaśnienie: na rysunku zaznaczono granice stref układów kartograficznych 2000 i 1965 oraz granice podziału administracyjnego (granice województw i powiatów) 59
60 60
61 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne STACJE REFERENCYJNE SATELITARNEGO SYSTEMU ASG-EUPOS (Aktywna Sieć Geodezyjna dla obszaru Polski, założona w 2008 r.) Stacje główne systemu w Warszawie i Katowicach serwisy pozycjonowania nawigacyjnego i precyzyjnego 61
62 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne Serwisy pozycjonowania systemu ASG-EUPOS Nazwa Dokładność wyznaczenia pozycji [m] Serwisy czasu rzeczywistego (kinematyczne) NAWGIS 1.0 KODGIS 0.25 NAWGEO (RTK) 0.03 [w poziomie] 0.06 [w wysokości] Serwisy postprocessingu (statyczne) POZGEO POZGEO-D m dla odbiorników dwuczęstotliwościowych lub 0.10 dla odbiorników jednoczęstotliwościowych Dokładność zależna od danych użytkownika 62

63 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne Miasto Łódź geodezyjna osnowa pozioma I i II klasy - jako przykład punkt geodezyjny klasy I punkt geodezyjny klasy II 63

64 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne Sieć pozioma III klasy miasta Łodzi - rys symboliczny 64
65 65
66 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne Objaśnienia: Punkty osnowy poziomej III klasy tworzą ciągi poligonowe (linie łamane). Pozostałe punkty stanowią osnowę pomiarową. W lewym dolnym rogu 66 arkusza mapy 1: jest podane godło w układzie Sekcja 1:10000 odpowiada wymiarom rzeczywistym: 5 km X 8 km
67 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne KLASYFIKACJE OSNÓW I SIECI GEODEZYJNYCH WYMIAROWOŚĆ OSNÓW I SIECI: POZIOME, WYSOKOŚCIOWE, TRÓJWYMIAROWE GEODEZYJNE OSNOWY PAŃSTWOWE: RZĘDY I KLASY DOKŁADNOŚCIOWE KLASA, MIARA DOKŁADNOŚCI RZĄD POZIOME + TRÓJWYMIAROWE WYSOKOŚCIOWE PODSTAWOWE 0 + I 1 3 cm I + II 1 2 mm/km SZCZEGÓŁOWE II + III m P 10 cm *) III + IV 5 10 mm/km POMIAROWE m P 20 cm 50 mm *) m P - błąd położenia punktu w danym układzie odniesienia OSNOWY I SIECI SPECJALNE (LOKALNE): REALIZACYJNE, KONTROLNE DO POMIARÓW PRZEMIESZCZEŃ I ODKSZTAŁCEŃ BUDOWLI RODZAJE SIECI POD WZGLĘDEM KSZTAŁTU: WEKTOROWE-GNSS, TRIANGULACYJNE, POLIGONOWE, POLIGONO-TRIANGULACYJNE, ELEMENTARNE: WCIĘCIA, UKŁADY LINII POMIAROWYCH OGÓLNA ZASADA POMIARÓW GEODEZYJNYCH: OD OGÓŁU DO SZCZEGÓŁU STRUKTURA HIERARCHICZNA OSNÓW I SIECI GEODEZYJNYCH 67
68 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne PRZYKŁADY SIECI GEODEZYJNYCH O RÓŻNYCH KSZTAŁTACH punkt dany (o wiadomych współrzędnych) punkt wyznaczany WEKTOROWA GPS (ΔX, ΔY, ΔZ) TRIANGULACYJNA α β γ α1 d1 α2 CIĄG POLIGONOWY α3 α4 d2 d3 d4 α5 d5 α6 68
69 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne Objaśnienie funkcji osnowy geodezyjnej i metod pomiarów sytuacyjnych x Metoda ortognalna (rzędnych i odciętych, domiarów prostokątnych) Metoda biegunowa Metoda przedłużeń i przecięć y 69
70 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne KONSTRUKCJE ELEMENTARNE SIECI GEODEZYJNYCH (WCIĘCIA) WCIĘCIE W PRZÓD P? WCIĘCIE WSTECZ B A A α β B α β C A ZADANIE HANSENA B P? - punkt o znanych współrzędnych P? α 1 β 1 β 2 α 2 Q? - punkt wyznaczany 70
71 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 4: Układy odniesienia osnowy i sieci geodezyjne NIEZAWODNOŚĆ UKŁADU OBSERWACYJNEGO (POMIAROWEGO) OGÓLNY PARAMETR NIEZAWODNOŚCI: z = (m-n)/m; z% = z 100% n = liczba niewiadomych parametrów układu (liczba niezbędnych elementów definiujących geometrię sieci) m = liczba niezależnych obserwacji (pomiarów) z = wskaźnik niezawodności m n = nadwymiarowość układu obserwacyjnego PRZYKŁAD: 1 α 1 A α A, B punkty dane 1, 2, 3, 4 punkty wyznaczane n = 2 4 =8 m =10+3=13 Z = (13 8) /13 = 5 /13 Z% 39% α 3 4 B 71
72 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Temat 5: NAZIEMNE TECHNIKI POMIAROWE Jakie techniki pomiarowe? Metody i techniki niwelacji Zasada niwelacji geometrycznej Przykłady niwelatorów optycznych Budowa niwelatora optycznego. Klasyfikacje niwelatorów. Sprawdzenie podstawowego warunku niwelatora Ciągi i sieci niwelacyjne Zasada niwelacji trygonometrycznej Idea niwelacji hydrostatycznej Zasada niwelacji barometrycznej Definicje kątów poziomych i pionowych Budowa teodolitu Dalmierz optyczny Współczesne instrumenty typu TOTAL-STATION Metody pomiarów długości klasyfikacje Bezpośrednie pomiary długości taśmą mierniczą Przykłady pośrednich pomiarów długości Dalmierze elektromagnetyczne, zasady działania i klasyfikacje Redukcje pomiarów długości Zintegrowane stacje pomiarowe Skanery laserowe 3D 72
73 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe JAKIE TECHNIKI POMIAROWE? NIWELACJA, NIWELATOR (przyrząd do pomiaru różnicy wysokości; sprzęt dodatkowy: łaty, żabki) POMIARY KĄTÓW, TEODOLIT (przyrząd do pomiarów kątów poziomych i pionowych) POMIARY DŁUGOŚCI, DALMIERZE (przyrządy do pomiarów długości) INSTRUMENTY TYPU TOTAL STATION (kompaktowe połączenie elektronicznego teodolitu, dalmierza elektromagnetycznego i procesora z pamięcią wewnętrzną; automatyczna rejestracja wewnętrzna wyników pomiarów; transmisja zbiorów danych do komputera zewnętrznego) ODBIORNIKI GNSS (GPS + GLONASS) ZINTEGROWANE STACJE POMIAROWE (połączenie TOTAL-STATION z odbiornikiem GPS) KAMERY CYFROWE I SKANERY LASEROWE 73
74 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe METODY I TECHNIKI NIWELACJI 1. GEOMETRYCZNA 2. TRYGONOMETRYCZNA 3. SATELITARNA (GPS) 4. HYDROSTATYCZNA 5. BAROMETRYCZNA 6. INNE (stereomodele fotogrametryczne, skaningi lotnicze, echosondy) B H B ΔH AB = H B -H A A lokalna płaszczyzna pozioma H A geoida (quasi-geoida) 74
75 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Łata w przód ZASADA NIWELACJI GEOMETRYCZNEJ Łata wstecz w = 1448 poziom p = 0684 oś celowa lunety B niwelator H AB = w p = m H AB A 75
 luneta celownik optyczny łata głowica statyw obiektyw Źródło:")
76 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe PRZYKŁAD: NIWELATOR OPTYCZNY FIRMY LEICA (Wild) luneta celownik optyczny łata głowica statyw obiektyw Źródło: śruba sercowa okular spodarka śruby ustawcze pokrętło ruchu leniwego stopka 76




77 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe NIWELATORY OPTYCZNE FIRM NIKON, TOPCON, GEO-FENNEL łata żabka - metalowa podstawa pełniąca funkcję tymczasowego punktu przeniesienia wysokości bolec do ustawiania stopki łaty Źródło: pl.wikipedia-plik żabka niwelacyjna.jpg Źródło: prospekty firmowe 77




78 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Idea kompensatora w niwelatorze optycznym (niwelator Bosch): Źródło: Niwelatory laserowe Obrotowy niwelator laserowy FatMax RL HW+, , STANLEY Źródło: Źródło: 78




79 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe NIWELATORY KODOWE FIRM: LEICA, SOKKIA przykładowa łata kodowa statyw 79

 c oś celowa: prosta łącząca środek optyczny obiektywu ze środkiem siatki celowniczej n oś libelli niwelacyjnej płaszczyzna główna libelli pudełkowej Niwelator z poziomowaniem automatycznym")
80 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe UKŁAD OSIOWY NIWELATORA Niwelator libellowy l BUDOWA NIWELATORA OPTYCZNEGO alhidada z lunetą + libella pudełkowa + kompensator (dawniej libella niwelacyjna + śruba elewacyjna) + sprzęg ruchu poziomego + pokrętło ruchu leniwego, spodarka ze śrubami ustawczymi statyw + osprzęt (łaty, żabki, libelle ) OSIE NIWELATORA g oś główna instrumentu (oś obrotu alhidady) c oś celowa: prosta łącząca środek optyczny obiektywu ze środkiem siatki celowniczej n oś libelli niwelacyjnej płaszczyzna główna libelli pudełkowej Niwelator z poziomowaniem automatycznym WARUNKI OSIOWE 1. n c lub kompensator poziomuje oś celową po spoziomowaniu libelli pudełkowej 2. g KLASYFIKACJE NIWELATORÓW Pod względem dokładności odczytu: techniczne (1mm), precyzyjne (0.01mm) W zakresie rozwiązań technicznych: optyczne, optoelektroniczne (kodowe łaty z kodem kreskowym), laserowe 80
81 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Libele: okrągła (pudełkowa), rurkowa przekrój podłużny sferyczny Oś libeli R powierzchnia sferyczna R d = 2mm przewaga libeli = (d / R)* d = 2mm ( typowo ) długość łuku pojedynczej działki libeli Libele precyzyjne : 1-4 (duży promień R) Libele mniej dokładne (budowlane) :
82 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe SPRAWDZENIE PODSTAWOWEGO WARUNKU NIWELATORA PODWÓJNĄ NIWELACJĄ: 1) ze środka 2) ze stanowiska w pobliżu jednej łaty w 2 w 2 2 p 2 + 2e p 2 w 1 + e w 1 1 P 1 + e p 1 ΔH = w 1 p 1 = w 2 p 2 = (w 1 +e) (p 1 +e) w 2 (p 2 +2e) efekt błędu niepoziomości osi celowej 82
83 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe CIĄG NIWELACYJNY łata 1 łata 2 łata 1 B łata 1 łata 2 3 ΔH 3 B 2 ΔH 23 1 ΔH 12 ΔH A1 A ΔH AB = ΔH A1 + ΔH 12 + ΔH 23 + ΔH 3B 1,2,3 punkty pomocnicze markowane żabką 83
84 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe o o o o B o o A o o Droga ciągu niwelacyjnego przy dużej deniwelacji 84
85 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Ćwiczenie rachunkowe 5.1. Pomiar i obliczenie ciągu niwelacyjnego zamkniętego Punkty I pomiar II pomiar l Średnia różnica Wysokości w w [m] H Uwagi p p + - H ID w - p w - p RpA RpA nawiązanie ż ż R R1 reper roboczy R ż ż R R2 reper roboczy R RpA RpA zamknięcie ciągu RpA ż1 R2 ż2 R1 (empiryczna) ż1, ż2 to pozycje żabki (wyrównana) S e = ( H) empir. = m; S t = ( H) teoret. = m Odchyłka: f = S e S t = m; Pojedyncza poprawka: = f / n ; n liczba przęseł. Przed uznaniem, że pomiar jest poprawny, powinno być sprawdzone kryterium techniczne f fmax (sposób określenia fmax, zależnie od długości ciągu ( L = l) będzie elementem innego tematu). Poprawkę dodajemy do różnic wysokości w zaokrągleniu do całkowitych mm 85
 Popularny niwelator precyzyjny KONI 007 firmy Carl Zeiss Jena (niwelator samopoziomujący o budowie peryskopowej) obudowa mikrometru Schemat optyczny niwelatora")
 siatka celownicza z klinem")

86 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Precyzyjne niwelatory optyczne (np.: NI 002, NI 004, KONI 007) Popularny niwelator precyzyjny KONI 007 firmy Carl Zeiss Jena (niwelator samopoziomujący o budowie peryskopowej) obudowa mikrometru Schemat optyczny niwelatora KONI 007 Łata z podziałem 0.5 cm do precyzyjnych niwelatorów optycznych okular lunetka odczytu kręgu poziomego pokrętło mikrometru libella pudełkowa kreska podziału łaty (w powiększeniu) siatka celownicza z klinem pokrętło ostrości obrazu pokrętło ruchu leniwego osłona szklana źródło: alfageodeta.cz obiektyw wahadło Symetria - efekt pozornego przesunięcia obrazu laty za pomocą pokrętła mikrometru sprzęgniętego z obrotem pryzmatu pentagonalnego wokół pewnej osi poziomej. Wielkość przesunięcia czytana na skali w okienku mikrometru. pryzmat pentagonalny soczewka ogniskująca okular swobodnie podwieszony układ pryzmatów źródło: geomatika.kma.zcu.cz Przykład pełnego sześciocyfrowego odczytu: [cyfry z łaty ][cyfry z okna mikrometru] o wartości m 86 (liczbę odczytaną mnożymy przez ):
87 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Ćwiczenie rachunkowe 5.2. Dziennik pomiarów precyzyjnych niwelatorem optycznym Nr stan. Nr punktu Nr łaty Długości temp. Pomiar I Pomiar II Średnia Data pomiaru [reper] celowej t w w różnica Godzina początku / końca [m] [ o C] p p Uwagi w p w p w p s1 Rp.A s s Rp.B = m Uwagi: Pomierzona różnica wysokości podlega różnego rodzaju redukcjom, które dalej (na kolejnym slajdzie) opisano. W tym celu są wykorzystywane informacje notowane w czasie pomiaru (m.in..: nr łaty, temperatura, data + czas). Zakładamy tutaj, że pomiar II jest wykonywany przy ponownym ustawieniu i spoziomowaniu niwelatora. Stosuje się również inne sposoby pomiaru kontrolnego, n p. z wykorzystaniem prawego podziału łaty, a także z wykorzystaniem podwójnych bolców na żabkach. Ten drugi sposób nie jest zalecany ze względu na duże prawdopodobieństwo popełniania błędów. Po wtóre, w niwelacji najwyższej dokładności, zamiast żabek stosuje specjalne kliny wbijane w ziemię (rysunek), które gwarantują większą pewność (stabilność) niż żabka. klin niwelacyjny 87
88 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Redukcje (poprawki) stosowane w niwelacji precyzyjnej: 1. Poprawki ze względu na komparację łat (porównanie metrów łaty z wzorcem metra w określonej temperaturze). W wyniku komparacji każda łata otrzymuje indywidualne świadectwo z poprawką komparacyjną. W celu uwzględniania poprawek komparacyjnych istotne jest notowanie w dzienniku pomiarowym numerów łat dla każdego odczytu. 2. Poprawki ze względu na rozszerzalność termiczną łaty, a właściwie jej inwarowej wstęgi z podziałem 0.5 cm, umieszczonej w drewnianej obudowie. W celu odpowiedniej redukcji pomiarów w dzienniku notuje się temperaturę otoczenia. 3. Poprawki ze względu na nierównoległość powierzchni ekwipotencjalnych, co sprawia, że wynik niwelacji zależy od drogi ciągu niwelacyjnego. Aby wyznaczane wysokości były zgodne z definicją w danym systemie wysokości należy do wyniku pomiaru wprowadzić poprawkę z tego tytułu. W obowiązującym w Polsce systemie wysokości normalnych odpowiednia poprawka nazywa się poprawką normalną. Poprawka ta składa się z dwóch części (członów): pierwszy jest funkcją parametrów pola normalnego i wysokości, drugi zależy istotnie od anomalii grawimetrycznej na poziomie geoidy (anomalii Faye a) oraz samej różnicy wysokości. 4. Poprawki wynikające z dynamiki pola potencjalnego Ziemi wywołane przyciąganiem Księżyca i Słońca (poprawki luno-solarne). Poprawki te są określone w funkcji parametrów położenia Słońca i Księżyca względem Ziemi i określonego punktu środka odcinka niwelacyjnego. Na podstawie współrzędnych geodezyjnych B, L, dat i czasów pomiarów poszczególnych odcinków linii obserwacyjnych oblicza się najpierw azymuty oraz kąty zenitalne Słońca i Księżyca, a także azymuty geodezyjne i długości odcinków niwelacyjnych, które są argumentami odpowiednich poprawek luno-solarnych. Szczegółowa problematyka z powyższego zakresu jest przedmiotem geodezji wyższej. 88
89 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe SIEĆ NIWELACYJNA (WYSOKOŚCIOWA) A 3 repery nawiązania 4 repery wyznaczane 2 B 1 5 ciąg niwelacyjny Liczba niewiadomych n = 5 Liczba obserwacji m =11 Wskaźnik niezawodności z = (11-5)/11 = 6/11 89
90 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Niwelacja trygonometryczna Różnica wysokości ( H AB ) wyznaczana z pomiaru kąta pionowego (zenitalnego) (z), długości skośnej (D s ), wysokości instrumentu (i), wysokości sygnału (s), z uwzględnieniem poprawki na krzywiznę Ziemi ( R ) i refrakcję atmosferyczną ( r ). z Inne oznaczenia: H A, H B wysokości punktów h przewyższenie h przewyższenie empir. kąt zbieżności linii pionu D/R [rad] ; cos( ) 1 kąt refrakcji z Ds D B i A R D R R Poprawka na krzywiznę Ziemi: R 2 +D 2 =(R+ R ) 2 D 2 = 2 R R + R 2 2 R R R D 2 /(2 R) R m Obliczenie: H AB = i + h s; h = h + R r h = [ D s cos(z) ] /cos( ) D s cos(z) r = k R ; R D 2 /(2 R); D D s sin(z); k 0.13 (empir. współczynnik refrakcji dla Polski) 90 R r = 0.87 D 2 /(2 R);
91 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Ćwiczenie rachunkowe 5.3. Obliczenie niwelacji trygonometrycznej Dane pomiarowe i obliczenia niwelacji trygonometrycznej Stanowisko S i = (wysokość instrumentu), H = (wysokość punktu stanowiska n. p. m.) Cel Pomiary Obliczenia ID z D S. s h D ( R r ) h H H i [g] [m] [m] [m] [m] [m] [m] [m] [m] Objaśnienia: z = kąt zenitalny [ g ], D s = odległość skośna, i = wysokość instrumentu, s = wysokość sygnału, D = D s sin(z) = odległość spoziomowana w punkcie stanowiska bez uwzględnienia poprawek, h = D s cos(z) = przewyższenie bez poprawek na krzywiznę Ziemi i refrakcję; h = h + ( R r ) = przewyższenie z uwzględnieniem krzywizny Ziemi i refrakcji ( R r ) = 0.87 * D 2 / (2 R); R m H = h + i s = różnica wysokości, H = wysokość stanowiska, H i wysokość punktu celu H i = H(stanowiska) + H 91

92 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe IDEA NIWELACJI HYDROSTATYCZNEJ A B ΔH AB podziałka pływak niwelator hydrostatyczny przewód elastyczny wypełniony cieczą jednorodną PRZYKŁAD: Precyzyjny niwelator hydrostatyczny firmy RICHTER Deformationsmesstechnik GmbH Dokładność 0.01mm Długość węża: 25m Zakres pomiarowy 100 mm. Możliwość zamontowania na stałe; równoczesne połączenie kilku niwelatorów Dokładność precyzyjnych niwelatorów hydrostatycznych 0.01 mm Zastosowania: badania przemieszczeń budowli (np. zapór wodnych); możliwe rejestracje zmian w sposób ciągły 92
93 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe ZASADA NIWELACJI BAROMETRYCZNEJ P 2 H 2 Niwelacja barometryczna prosta ale najmniej dokładna metoda niwelacji, polega na wykorzystaniu zależności zmiany ciśnienia atmosferycznego od zmiany wysokości. Pomiary ciśnienia atmosferycznego punktach terenowych dokonuje się wraz z pomiarem temperatury, która ma wpływ na określoną zależność. Iloczyn różnicy zmierzonego ciśnienia atmosferycznego i tzw. stopnia barometrycznego, czyli przyrostu wysokości na jednostkę ciśnienia, daje przybliżoną wartość różnicy wysokości. Stopień barometryczny przyjmuje różne wartości dla różnych regionów geograficznych i zależnie od ciśnienia i temperatury. W Polsce wynosi około 11,5 m/ 1 mm Hg - czyli przy zmianie wysokości o 11,5 metra ciśnienie atmosferyczne zmieni się o 1 mm słupa rtęci. Wzór uproszczony Babinetta H = (1+α T) (P 1 P 2 ) / (P 1 + P 2 ) = dh (P 1 P 2 ) [m], H gdzie: P 1, P 2 ciśnienie na określonych dwóch wysokościach [hpa], T średnia temperatura powietrza pomiędzy punktami pomiarowymi [ºC], α współczynnik rozszerzalności objętościowej gazów = 1/273, dh stopień barometryczny [m / hpa]. Niwelacja barometryczna daje najmniej dokładne wyniki spośród wszystkich rodzajów niwelacji (błąd średni do 3m). Może służyć np. do wyznaczania wysokości w obszarach wysokogórskich. Przyrządy: barometry metalowe (aneroidy) lub rtęciowe. H 1 P 1 93
94 Linia pionu R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe DEFINICJE KĄTÓW POZIOMYCH (HORYZONTALNYCH) I PIONOWYCH α kąt poziomy z, kąty pionowe: z kąt zenitalny kąt podniesienia z + = 90 o (100 g ) z α 94

95 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe TEODOLIT muzealny libella kolimacyjna okular Teodolit optyczny, z lat tych, produkcji rosyjskiej. Odczyt bezpośredni na limbusie przez lupkę. Precyzja odczytu z pomocą podziałki noniusza. Libella kolimacyjna zapewniała poziomowanie systemu odczytowego koła pionowego lupa widoczny fragment limbusa (kręgu poziomego i pionowego) spodarka ze śrubami ustawczymi Źródło: 95 zacisk ruchu poziomego ze śrubą ruchu leniwego



96 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Teodolity optyczne i elektroniczne - przykłady Teodolity optyczne Teodolit elektroniczny Nivel System DT-2 Źródło: Źródło: api.ning.com Źródło: 96



97 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe PRZYKŁADOWE WSPÓŁCZESNE INSTRUMENTY TYPU TOTAL-STATION firm : TRIMBLE, TOPCON. PODOBNE KLASY INSTRUMENTÓW OFERUJĄ TAKŻE INNE FIRMY: WILD - LEICA, ZEISS, AGA-GEOTRONICS I INNE. Instrumenty tego typu stanowią integracje teodolitu i dalmierza elektromagnetycznego z elektronicznym układem pomiarowym, pamięcią wewnętrzną i oprogramowaniem geodezyjnym. Źródło: prospekty firmowe 97
98 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe TEODOLIT OSIE KONSTRUKCYJNE I WARUNKI GEOMETRYCZNE OSIE TEODOLITU: c - oś celowa lunety o - oś obrotu lunety g - oś główna (obrotu alidady) α - płaszczyzna główna libelli pudełkowej l a - oś libelli rurkowej g.. o c WARUNKI GEOMETRYCZNE: c o (warunek kolimacji) g o (warunek inklinacji) α, l a g (warunek libelli alhidadowej) warunek miejsca zera kręgu pionowego (poziomowanie lub pionowanie wskaźników zerowych systemu odczytowego kątów pionowych za pomocą libelli kolimacyjnej lub kompensatora) (niespełnienie warunków oznacza istnienie błędu określonego rodzaju)... α l a Pomiary kątów poziomych i pionowych wykonuje się zwykle w dwóch położeniach lunety (mówimy inaczej: w dwóch półpoczetach), po przerzuceniu lunety przez zenit. W przypadku kątów poziomych powoduje to eliminację istotnego wpływu ewentualnych błędów kolimacji i inklinacji, natomiast przy pomiarze kąta pionowego, średnia z pomiarów w dwóch półpoczetach eliminuje wpływ błędu miejsca zera kręgu pionowego. 98
99 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Poziomowanie i centrowanie instrumentu z pionownikiem optycznym Czynności elementarne: okular pionownika optycznego 1. Przybliżone ustawienie centryczne i poziome (zakładamy, że instrument jest przymocowany do statywu; wbijamy jedną nóżkę statywu, a trzymając rękami dwie pozostałe i patrząc w lunetkę pionownika przemieszczamy instrument w poziomie do momentu uzyskania efektu centryczności; następnie wbijamy nogi statywu) 2. Poprawiamy centrowanie przy użyciu śrub ustawczych spodarki. znak głowica śruba sercowa zacisk do regulowania długości nóżki statywu 3. Poziomujemy w przybliżeniu libellę alhidadową, pudełkową lub rurkową, za pomocą nóżek statywu (przy poluzowanych zaciskach dokonujemy skracania lub wydłużania nóżek, aż do uzyskania efektu górowania libelli, przy czym używając libelli rurkowej ustawiamy alhidadę w dwóch kierunkach, wzajemnie prostopadłych). 4. Poprawiamy poziomowanie śrubami ustawczymi spodarki i sprawdzamy, czy oś pionownika trafia centrycznie w znak 5. W razie potrzeby odkręcamy delikatnie śrubę sercową mocującą spodarkę z głowicą statywu, a następnie (równie delikatnie) przemieszczamy spodarkę na statywie (wykonując jedynie jej przesunięcie bez obracania - nie powodując tym samym wychylenia libelli) 6. Powtarzamy czynność poziomowania jak w punkcie 4, a jeśli potrzeba powtarzamy również czynności wymienione w p
100 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Ćwiczenie rachunkowe 5.4. Dziennik pomiaru kątów poziomych i pionowych - przykład S 1 A szkic sytuacyjny pomiaru kątów względem ustalonego kierunku początkowego (metoda kierunkowa) Pomiar kąta zenitalnego - szkic I położenie lunety V( I ) II położenie lunety V( II ) C B Data pomiaru: Instrument: THEO 010A Obserwator: J. Kowalski Stacja cel I położenie lunety II położenie lunety odchylenia Kierunki Hz średnie wartości (II-I) zredukowane Hz V Hz V ehz ev Hz I Hz II Hz V [g] [g] [g] [g] [cc] [cc] [g] [g] [g] [g] S1 A B C Objaśnienia: Hz odczyt kierunku poziomego (Horyzontalnego) V - odczyt kąta pionowego zenitalnego (Wertykalnego) Zależności teoretyczne pomiędzy odczytami w I i II położeniu lunety: Hz( II ) = Hz( I ) g, V( II ) = 400 g V( I ) ehz, ev odchylenia empiryczne pomiędzy I i II położeniem lunety ev - zawiera podwójną wartość kątową błędu miejsca zera (m o 30 cc ) kręgu pionowego eliminuje je średnia wartość kąta pionowego. 100
101 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe LUNETA ELEMENTY UKŁADU OPTYCZNEGO Układ ogniskujący oś celowa cel okular (lupa) Siatka celownicza oś główna instrumentu (oś obrotu alhidady) obiektyw celowanie przez bisekcję widok siatki celowniczej przez okular (kreski podwójne do celowania przez bisekcję). kreski dalmierza optycznego sygnał celu kreska podwójna siatki celowniczej 101
 łata okular (lupa) Siatka celownicza oś główna instrumentu (oś obrotu alhidady) obiektyw punkt analaktyczny oś celowa")
102 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe DALMIERZ OPTYCZNY (w lunetach geodezyjnych) łata okular (lupa) Siatka celownicza oś główna instrumentu (oś obrotu alhidady) obiektyw punkt analaktyczny oś celowa ε b Przykład: 1816 = O g 1692 = O d c 0124 = O g O d = b D = = 12.4 m d D D = d + c (c = stała dodawania; dla nowych lunet c = 0) d = b k ; k = stała mnożna =100 k = (1/2) ctg(ε/2) ε stały kąt paralaktyczny 102
103 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe METODY POMIARÓW DŁUGOŚCI OGÓLNA KLASYFIKACJA: BEZPOŚREDNIE, POŚREDNIE METODY BEZPOŚREDNICH POMIARÓW DŁUGOŚCI: przymiarem wstęgowym (taśmą) lub innym, optyczne (dalmierze optyczne jedno-lub dwuobrazowe), elektromagnetycznie (dalmierze elektromagnetyczne: radiowe, świetlne, laserowe), technika GPS, Inne POŚREDNIE POMIARY DŁUGOŚCI paralaktyczne za pomocą konstrukcji trygonometrycznej 103
104 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe POMIARY BEZPOŚREDNIE TAŚMĄ MIERNICZĄ (stosuje się jeszcze w pomiarach górniczych) D = n L + r = L (n + r / L) = L n ; n = n + r / L (l. rzeczywista); L = długość rzeczywista przymiaru, n całkowita ilość odłożeń, r = reszta L = L n + Δ k + Δ t L n = długość nominalna przymiaru (np. 20m, 50m) Δ k = poprawka komparacyjna w temperaturze t o Δ t = poprawka termiczna = L n α (t t o ) α = współczynnik rozszerzalności termicznej (typowo α = ) t = temperatura pomiaru A L pion L L r B A D B 104
105 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe pion przykład sytuacyjny na budowie: odczyt miary przymiar liniowy D (odległość pozioma) 105
106 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe POŚREDNIE POMIARY DŁUGOŚCI - przykład 1? α b β 106
107 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe POŚREDNIE POMIARY DŁUGOŚCI - przykład 2? α 2 β 2 α 1 β 1 b 107
108 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe DALMIERZE ELEKTROMAGNETYCZNE Klasyfikacja ze względu na rodzaj elektromagnetycznych sygnałów pomiarowych i sposób pomiaru czasu: a) impulsowe, których sygnał pomiarowy jest ciągiem pojedynczych impulsów. b) fazowe, których sygnał pomiarowy jest ciągłą falą harmoniczną, przy czym stosuje się co najmniej dwie częstotliwości fali. W dalmierzach impulsowych mierzony jest czas od momentu wyjścia konkretnego impulsu do jego powrotu. Czas ten jest mierzony w układzie analogowo-cyfrowym z generatorem podstawy czasu (oscyloskop, oscylator kwarcowy, przetwornik analogowo-cyfrowy). Rozwiazania techniczne mogą łączyć cechy dalmierzy impulsowych i fazowych. Dalmierze impulsowe pozwalają na bezlustrowy pomiar długości ale fazowe są dokładniejsze. 108
109 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Idea dalmierzy impulsowych D D Nadajnik (generator impulsów ektromagnetycznych), odbiornik, zegar (oscylator kwarcowy) 2 D = t c c = prędkość światła t = mierzony interwał czasu Idea dalmierzy fazowych Nadajnik (generator fali ektromagnetycznej), odbiornikfazomierz, zegar (oscylator kwarcowy) 2 D = [ N + R ], R = / (2 ) N = nieoznaczoność (liczba całkowita) określana z układu równań przy zmianie częstotliwości fali, 109 = długość fali, = faza mierzona
110 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe KLASYFIKACJA DALMIERZY ZALEŻNIE OD ZAKRESU FAL radiowe: : m systemy radiolokacyjne o zasięgu do kilkuset km (dokładności metrowe), Systemy: Shoran, Loran, Decca. : m dalmierze mikrofalowe dokładności centymetrowe. WILD DI 50 Distomat (Szwajcaria), Distameter (RFN) Tellurometr (RPA) OG-1, RG-1, RG-10 (PL) świetlne (elektrooptyczne, laserowe): : 0.5 m interferencyjne (najwyższe dokładności) : m elektrooptyczne mają podstawowe zastosowania geodezyjne, np.: Distomat DI 3 (Szwajcaria) Nowe produkcje to instrumenty typu Total-Station m.in. firm: TOPCON, NIKON, SOKKIA ZEISS, GEOTRONICS, TRIMBLE 110
111 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Rzutowanie ortogonalne pomierzonej długości na lokalną płaszczyznę poziomą (bez uwzględnienia zbieżności linii pionu) z d d o H Dane: Pomierzona jest długość skośna d oraz wielkość służąca poziomowaniu długości: - kąt zenitalny z lub kąt podniesienia lub - różnica wysokości końców odcinka H Długość spoziomowana wzory alternatywne: d o = d cos( ) = d sin(z) lub d 0 = (d 2 H 2 ) 1/2 lub d o = d gdzie odpowiednio: = d d o = d (1 cos( )) = 2 d sin 2 ( /2)) = 2 d sin 2 ((90 o z)/2)) lub = d d o = d (d 2 H 2 ) 1/2 = H 2 / [d+(d 2 H 2 ) 1/2 ] Wzór uproszczony ~ = H 2 / (2 d) jest obarczony błędem (niedomiarem) wielkości d = 2 d sin 4 ( /2), co obrazuje tabela z przykładami dla d = 100m i różnych pochyleń: [ g ] d[m] H d 0 (d=100m) ~ [m] d (d=100m) < < < < <
112 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Redukcje pomierzonej długości skośnej z uwzględnieniem sferycznej powierzchni odniesienia linia pionu kąt refrakcji powierzchnia terenu quasi-geoida krzywa refrakcji d e d 0 d Pomierzona długość skośna: d = AB Długość spoziomowana: d 0 = A 1 B 1 = AB 3 (na dwusiecznej kąta środkowego i średniej wysokości końców odcinka <AB>): d 0 = d sin(z /2 + ) d sin(z) łączna poprawka na krzywiznę Ziemi i refrakcję, przy czym sama refrakcja nie wpływa istotnie na długość. Powierzchnią odniesienia jest sfera o promieniu R s równym średniemu, lokalnemu promieniowi krzywizny elipsoidy d c = d 0 + c długość cięciwy łuku sfery odniesienia, c poprawka ze względu na wysokość nad powierzchnią odniesienia d c d e = d c + e długość łuku sfery e poprawka ze względu na różnicę długości łuku i cięciwy Teoretycznie, zamiast łuku sfery powinno się uwzględniać odpowiedni odcinek linii geodezyjnej na elipsoidzie, ale sama poprawka e nawet w sytuacjach ekstremalnych nie jest praktycznie istotna. Wzory na poprawki: 0 d cos(z) ( /2 ) d cos(z) d sin(z) / [2 (R s +h s )] = d 2 sin(2 z) / [ 4 (R s +h s )] (poprawka na krzywiznę Ziemi i refrakcję do długości skośnej) gdzie: h s = (h 1 +h 2 ) / 2; h 1 = H A + + i ( wysokość normalna + wysokość quasigeoidy + wysokość instrumentu ); h 2 = h 1 + H 12 ; H 12 = d cos (z /2 + ) d cos (z) + H H = d sin(z) ( /2 ) d sin(z) { d sin(z) / [2 (R s +h s )] } = 0.86 d 2 sin 2 (z) / [2 (R s +h s )] ; (poprawka na krzywiznę Ziemi i refrakcję w zadaniu niwelacji trygonometrycznej omówionym wcześniej ) ; c = h s d 0 / (R s +h s ) (poprawka wysokościowa) e = R s d c = R s ( 2 sin ( /2 ) = R s ( 3 / 24 5 / ) R s 3 / 24 (poprawka nie jest praktycznie istotna, bo nawet dla wyjątkowych wartości, d = 10 km i pochyleniu =30[g], wynosi tylko ok. 3 mm ) 112
113 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe Ćwiczenie rachunkowe 5.5. Przykłady redukcji długości skośnej łącznie z niwelacją trygonometryczną Dane i wyniki obliczeń Dane stanowiska: H 1 = H A (norm)+ A + i A = = (składniki: wysokość normalna, wysokość quasi-geoidy, wysokość instrumentu) ID Długość Kąt d sin(z) d cos(z) H H 2 H s 0 c d c d e d [m] z [g] Objaśnienia: d sin(z) = długość spoziomowana bez uwzględnienia poprawek d cos(z) = różnica wysokości obliczona bez uwzględnienia poprawek H = sumaryczna poprawka na krzywiznę Ziemi i refrakcję dla różnicy wysokości 0 = sumaryczna poprawka na krzywiznę Ziemi i refrakcję dla długości c = poprawka długości ze względu na wysokość nad powierzchnią odniesienia 0 = 0.86 d 2 sin(2 z) / [ 4 (R s +h s )] ; h s = (h 1 +h 2 ) / 2; h 1 = H A (norm) + A + i A ; h 2 = h 1 + h 12 ; H 12 = d cos (z) + H ; H 0.86 d 2 sin 2 (z) / [2 (R s +h s )] ; c = h s d 0 / (R s +h s ) Do obliczenia poprawek przyjęto wyjątkowo uproszczenie R s m, zachowujące dokładność do 3 cyfr znaczących wartości poprawki (zob. tematykę dotyczącą błędów zaokrągleń). 113
114 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning TEMAT 6: FOTOGRAMETRIA, TELEDETEKCJA I SKANING Przedmiot fotogrametrii Metody opracowań fotogrametrycznych Teledetekcja Skanery laserowe 3D. Przykłady produktów firm: TOPCON, Leica- GEOSYSTEMS Zasady transformacji obrazów do układów odniesienia 114
115 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning PRZEDMIOT FOTOGRAMETRII FOTOGRAMETRIA (grec.: photos + gramma + metro, inaczej: fotograficzny zapis mierzalny). Zdjęcia terenu lub obiektów specjalnych, wykonane za pomocą kamer cyfrowych lub analogowych nazywamy fotogramami jeśli są podstawą do tworzenia metrycznych (mierzalnych) zobrazowań płaskich lub trójwymiarowych w postaci mapy, ortofotomapy lub modeli przestrzennych obiektów specjalnych. Obraz na zdjęciu jest rzutem środkowym natomiast mapa jest (w pewnym uproszczeniu) rzutem lokalnie prostokątnym (ortogonalnym). Przekształcaniem fotogramów w mapy lub inne odwzorowania metryczne zajmuje się właśnie fotogrametria. Para fotogramów tego samego obiektu (lub jego fragmentu) stanowi stereogram. W oparciu o stereogram tworzy się model przestrzenny obiektu lub jego fragmentu. W szczególności, w zakresie stosowanych metod (technik) i zastosowań wyróżnia się dwa działy: fotogrametrię lotniczą i fotogrametrię naziemną. FOTOGRAMETRIA LOTNICZA (aerofotogrametria) pozyskuje obrazy za pomocą kamer lotniczych. Naloty planuje się szeregami, które tworzą bloki zdjęć (fotogramów). W pojedynczym szeregu, pary, a także trójki zdjęć zawierają odfotografowane obszary wspólne (wzajemego pokrycia), co umożliwia utworzenie stereogramów i modeli przestrzennych. Na tej podstawie tworzy się różnego rodzaju produkty, takie jak: mapy, ortofotomapy, numeryczne modele terenu (NMT), fotogramy o określonej dokładnie orientacji przestrzennej. Oprócz samolotów używa się bezzałogowych statków powietrznych (dronów) lub helikopterów. FOTOGRAMETRIA NAZIEMNA (terrofotogrametria) pozyskuje obrazy kamerami naziemnymi tworząc odwzorowania (modele przestrzenne) obiektów specjalnych, np. elewacji budowli zabytkowych, kominów (okresowy monitoring pionowości osi). 115
116 Ilustracje pojęć fotogrametrii lotniczej R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning fotogram (odwzorowanie 2D - rzut środkowy) oś kamery y x układ współrzędnych tłowych stereogram odległość obrazu f (ogniskowa kamery) środek rzutów Z X obiekt 3D - teren Y fotogram analogowy: y zasięg obszarowy fotogramu x obszar wspólny (dla budowy modelu 3D) znaczki tłowe reprezentujące układ współrzędnych tłowych 116
117 Podstawowa zależność analityczna fotogrametrii R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning środek rzutów Z z X Y f y obraz fotogramu w symetrii środkowej O s x (X s, Y s, Z s ) p układ terenowy Układ współrzędnych tłowych P (X P, Y P, Z P ) Jest to zależność pomiędzy współrzędnymi tłowymi, a współrzędnymi terenowymi punktu (równanie parametryczne promienia rzutującego) X P X s x p Y P = Y s + k C(,, ) y p (6.1) Z P Z s f x p, y p, f współrzędne punktu (p) w układzie lokalnym kamery, (x,y,z) zwanym układem współrzędnych tłowych X P, Y P, Z P współrzędne odpowiadającego punktu terenowego w układzie współrzędnych terenowych (X, Y, Z ) X s, Y s, Z s współrzędne terenowe środka rzutów w momencie ekspozycji, k faktor skali lokalnej fotogramu jako stosunek odległości s-p do s-p. W pojedynczym równaniu jest to wielkość nieoznaczona (nieokreślone położenie punktu P na promieniu rzutującym). C(,, ) ortonormalna macierz obrotów, sprowadzająca układ współrzędnych tłowych do postaci o osiach równoległych do układu terenowego;,, - kąty jakie tworzą wzjemnie odpowiadające osie układu tłowego i terenowego. Dwa promienie homologiczne (dotyczące tego samego fizycznie punktu) z różnych fotogramów definiują położenie punktu jako przecięcie prostych. 117
118 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning Blok fotogramów lotniczych szereg 1 szereg 2 trasa lotu samolotu szereg 3 szereg 4 obszary pokrycia poprzecznego szeregów szereg 5 fotopunkty punkty geodezyjne o danych współrzędnych w układzie terenowym punkt wiążący (łączny) - wspólny dla dwóch lub kilku fotogramów Ilustracja pokrycia podłużnego (podwójnego i potrójnego) trójki fotogramów Podstawą do opracowań numerycznych obiektu jest określenie elementów orientacji zewnętrznej wszystkich fotogramów. To dokonuje się na drodze utworzenia i wyrównania sieci fotogrametrycznej (aerotriangulacji) złożonej z tzw. fotopunktów oraz punktów łącznych identyfikowanych w obszarach wspólnych fotogramów. Fotopunkty są to punkty geodezyjne o określonych współrzędnych XYZ. 118

119 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning Blok fotogramów lotniczych ilustracja przestrzenna fotopunkty punkty wiążące fotogramów Źródło zdjecia: commons.wikipedia.org/wiki/ file: Roztropice_zdjecie_lotnicze_26,08,2010.jpg 119
120 Elementy aerotriangulacji R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning Aerotriangulacja, podobnie jak trójwymiarowa sieć geodezyjna, jest siecią przestrzenną utworzoną przez punkty naziemne i środki rzutów w momentach ekspozycji oraz łączące je promienie homologiczne Punkty naziemne to: - Fotopunkty, posiadające współrzędne w układzie terenowym (w celu odfotografowania na zdjęciu dokonuje się specjalnego oznakowania takich punktów, np. przez pomalowanie białą farbą). - Punkty wiążące fotogramów, są to punkty zidentyfikowane jednoznacznie na co najmniej na 2 fotogramach (mogą to być jednoznacznie określone punkty szczegółów terenowych), których współrzędne terenowe chcemy wyznaczyć poprzez rozwiązanie zadania aerotriangulacji. Stosownie do wymienionych rodzajów punktów tworzy się równania warunkowe na bazie ogólnego równania (6.1). W przypadku fotopunktów, dla lewych stron równań (6.1) przyjmujemy znane wartości liczbowe współrzędnych terenowych, natomiast dla punktów wiążących, przyrównujemy lewe strony równań tego typu dla obrazów tego samego punktu na różnych fotogramach. Aerotriangulacja ma na celu wyznaczenie 6 elementów orientacji zewnętrznej każdego fotogramu, czyli parametrów określających położenie układu tłowego w przestrzeni. Są to 3 współrzędne środka rzutów + 3 kąty orientujące osie układu tłowego względem układu terenowego. W ten sposób można odtworzyć analitycznie cały ukłąd przestrzenny fotogramów (w momentach ich ekspozycji) i zbudować model przestrzenny interesującego nas obiektu. Zadania powyższe realizują dziś programy komputerowe. Dawniej stosowano do tego celu metody i techniki analogowe, w tym przyrządy zwane autografami, umożliwiające automatyzację prac. Elementarne zadanie budowy modelu z pojedynczego stereogramu ilustruje kolejny slajd. 120
121 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning Elementarne zadanie fotogrametrii analityczne określenie punktów modelu 3D ze stereogramu P, P - obrazy punktu P na fotogramach, przy czym (x,y ), (x,y ) współrzędne w układach tłowych (X 1,Y 1,Z 1 ), (X 2,Y 2,Z 2 ) układy współrzędnych zewnętrznych fotogramów: - O, O - początki układów w środkach rzutów - osie Z 1, Z 2 pokrywają się z położeniami osi kamery - osie Y 1, Y 2 równoległe do odpowiadających osi układów współrzędnych tłowych Położenie drugiego fotogramu względem pierwszego określa 6 parametrów orientacji wzajemnej: - wektor przesunięcia środka rzutów ( X, Y, Z) - kąty,,, pomiędzy kierunkami odpowiadających osi, układu drugiego względem pierwszego. Aby zbudować model przestrzenny potrzeba znać te parametry. 121
122 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning METODY I TECHNIKI OPRACOWAŃ FOTOGRAMETRYCZNYCH Metoda analogowa. Zdjęcia analogowe na filmie zwojowym lub na oddzielnych kliszach, podlegają optycznomechanicznym (analogowym) przetworzeniom. Specjalnymi przyrządami są autografy analogowe, które pozwalają na odtworzenie wiązki promieni każdego fotogramu oraz tworzenia analogowych modeli przestrzennych, obserwowanych dwuocznie przez operatora przyrządu. Operator ma możliwość dokonywania pomiarów na takim modelu, a w rezultacie tworzenia produktów opracowań fotogrametrycznych: map, modeli terenu, modeli 3D obiektów. Metoda analityczna. Istotą metod analitycznych jest tworzenie przestrzennych zbiorów punktów modeli w oparciu o pomierzone współrzędne tłowe na fotogramach i wykorzystanie związków analitycznych pomiędzy odpowiadającymi promieniami homologicznymi definiującymi punkty modeli przestrzennych. Metody analityczne pozwalają przede wszystkim na fotogrametryczne zagęszczanie osnów geodezyjnych za pomocą tzw. aerotriangulacji, której wyniki wspomagają opracowania analogowe bloków złożonych z wielu stereomodeli. Metoda cyfrowa. Metoda ta wykorzystuje zdjęcia zapisane w postaci cyfrowej (wykonane kamerami cyfrowymi lub zeskanowane zdjęcia analogowe). Do tworzenia modeli i map cyfrowych stosuje się oprogramowanie komputerowe. Szczególnym produktem jest tzw. ortofotomapa cyfrowa utworzona z fotogramów przekształconych w obrazy ortogonalne za pośrednictwem numerycznego modelu terenu (NMT). 122

![[ zobrazowania jedno lub dwuobrazowe, czyli płaskie lub trójwymiarowe ] Kamera](/docs-images/67/57390734/images/123-1.jpg "Photheo 19/1318 Zeiss Jena Przykład opracowania elewacji Źródło: www.geoforum.")
123 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning Elementy fotogrametrii naziemnej [ zobrazowania jedno lub dwuobrazowe, czyli płaskie lub trójwymiarowe ] Kamera Photheo 19/1318 Zeiss Jena Przykład opracowania elewacji Źródło: Źródło: 123
124 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning Przekształcenia rzutowe płaszczyzny w zastosowaniach fotogrametrycznych (przekształcenia obrazów płaskich) Przekształcenia współrzędnych (x,y) (X,Y): A x + B y + C X = D x + E y + 1 fotogram Y = F x + G y + H D x + E y + 1 obiekt płaski (teren) rzut ortogonalny Przekształcenie jest funkcją 8 parametrów (A, B, C, D, E, F, G, H), czyli jest określone jednoznacznie przez 4 punkty o zadanych współrzędnych w dwóch układach płaskich. Układy oznaczonych umownie: (x,y) i (X,Y). Własności przekształceń rzutowych: proste odwzorowują się na proste, zachowany zostaje tzw. dwustosunek czwórki punktów na prostej: plan - mapa a b A c d B C D AC AD ac ad : = : BC BD bc bd 124
125 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning Przekształcenie rzutowe fotogramu obiektu płaskiego, np. elewacji budynku (idea geometryczna, którą można opisać analitycznie i implementować numerycznie) Fotogram (zdjęcie metryczne) Plan w umownej skali L P L P element zadanej 4-punktowej siatki bazowej; punkty mają wyznaczone współrzędne ruchoma linijka z zaznaczonymi przecięciami 3 promieni siatki bazowej i promienia do punktu obiektu linijka ułożona tak, by były zachowane Identyczne jak na fotogramie odległości wzajemne przecięć z trzema promieniami siatki bazowej. Kierunek do punktu obiektu wyznaczy odpowiednie przecięcie zaznaczone w oryginale. 125
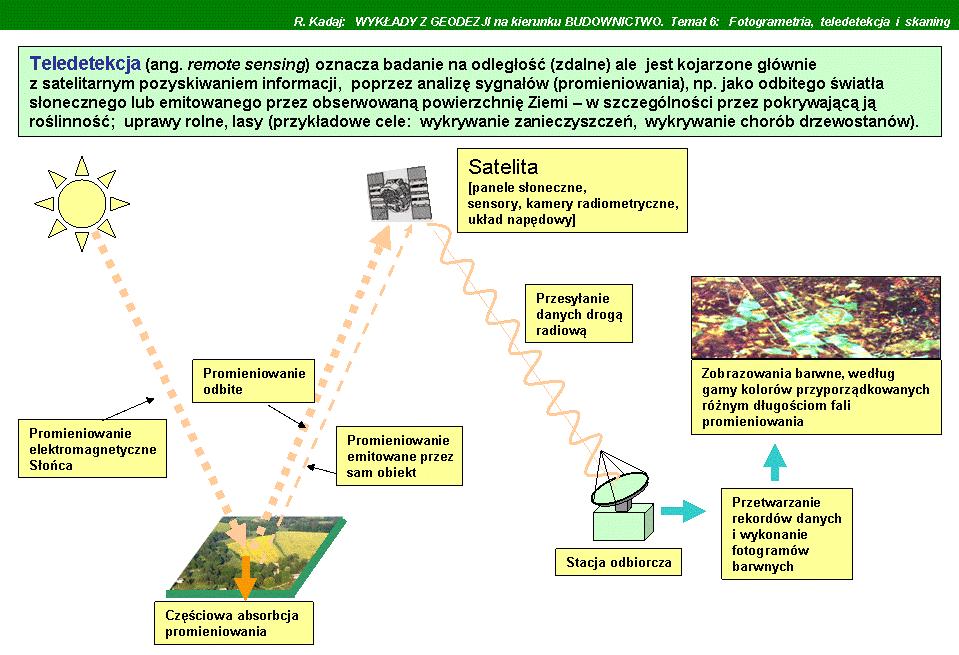
126 126


127 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 6: Fotogrametria, teledetekcja i skaning SKANERY LASEROWE 3D. Przykłady produktów firm: TOPCON i LEICA-GEOSYSTEMS Źródło: Źródło: Naziemny skaning laserowy najnowsza technika pomiaru. Wiązka laserowa odbita od obiektu i skorelowana z sygnałem wychodzącym w trybie fazowym lub impulsowym, daje informacje o położeniu punktu (X,Y,Z) oraz jego cechy jako piksela. Skanowanie odbywa się w dwóch płaszczyznach. W wyniku otrzymujemy chmurę punktów, która może być wizualizowana lub przetwarzana numerycznie do postaci mapy 3D, przekroju, rzutu itp. Wysoka rozdzielczość skanowania (piksel rzędu mm lub kilku cm) sprawia, że nawet duża pamięć dyskowa przepełnia się milionami rekordów danych. Istotnym problemem jest tworzenie optymalnego oprogramowania umożliwiającego selekcję i przetwarzanie tak dużej liczby danych. 127
128 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) TEMAT 7: TECHNIKI SATELITARNE (GNSS) System GPS (Global Positioning System) i inne: GLONASS, GALILEO, BEI-DOU Segment kosmiczny systemu GPS Segment kontrolny systemu GPS Parametry orbity keplerowskiej satelity Współrzędne chwilowe satelity w układzie geocentrycznym Struktury sygnałów GPS Refrakcja jonosferyczna i troposferyczna Zasada pomiaru pseudo-odległości do satelity Wyznaczenie pozycji bezwzględnej na podstawie pseudo-odległości Geometryczna interpretacja obserwacji fazowych Wyznaczenie wektora GPS z równań różnicowych obserwacji fazowych Przykładowy obraz residuów w rozwiązaniu metodą potrójnych różnic faz Przykładowy obraz obserwacji satelitów w sesjach 3h i 12h Klasy odbiorników GNSS Zastosowania odbiorników nawigacyjnych GNSS Przykłady odbiorników geodezyjnych Stacje referencyjne satelitarnego systemu ASG-EUPOS Strona internetowa systemu ASG-EUPOS (stan w roku 2008) Serwisy systemu ASG-EUPOS z oceną dokładności pozycjonowania Zasada wyznaczenia pozycji w serwisie POZGEO Pomiary w czasie rzeczywistym RTK (Real Time Kinematic) Przykłady zastosowań metod statycznych do zakładania osnów geodezyjnych Zasada niwelacji satelitarnej Numeryczny model quasi-geoidy i jego zastosowanie. 128
129 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) SYSTEM GPS (Global Positioning System) I INNE: GLONASS, GALILEO, BEI-DOU Poprzednio: system TRANSIT (6 satelitów emitujących fale radiowe o częstotliwościach MHz, dla użytkowników cywilnych od 1967r, wyprodukowano ok odbiorników, czas sesji obserwacyjnej ok. 18 min błąd ok m, przy długotrwałych obserwacjach osiągano błędy pozycjonowania < 1m). SEGMENTY SYSTEMU GPS (testy projektu od 1973 r, pierwsze satelity od 1978): SEGMENT KOSMICZNY (24 satelity) SEGMENT KONTROLNY (NAZIEMNE STACJE ŚLEDZĄCE) SEGMENT UŻYTKOWNIKA (ODBIORNIKI GPS) 129
130 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) SEGMENT KOSMICZNY SYSTEMU GPS : 24 Satelity na wysokości ok km na 6 orbitach prawie kołowych, nachylonych pod kątem ok. 55 o do płaszczyzny równika; po 4 satelity na jednej orbicie; okres obiegu 12h; emisja fal radiowych o dwóch częstotliwościach, na bazie atomowych wzorców czasu (10.23 MHz bląd s ), modulowanych pseudolosowymi sygnałami kodowymi C/A, P, z nałożoną depeszą satelitarną. płaszczyzna równika Komentarze: Pierwsze 11 satelitów (BLOK I) na orbicie od 1978 (sredni czas życia 4.5 roku), dostępne do celów cywilnych. Druga seria 28 satelitów (BLOK II: II +IIA) od 1994 r; kod precyzyjny dostępny dla celów wojskowych. Niektóre wyposażone w odbłyśniki laserowe umożliwiające precyzyjne śledzenie orbit przez naziemne pomiary odległości urządzeniami laserowymi. W latach następnych kolejne serie (BLOK III) średni czas życia satelity 7.5 roku. Stale jest w użyciu 24 satelity.
 SEGMENT KONTROLNY SYSTEMU GPS - 5 stacji naziemnych monitorujących ruch satelitów i przekazujących informacje do stacji głównej Stacja główna (Master Control")
131 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) SEGMENT KONTROLNY SYSTEMU GPS - 5 stacji naziemnych monitorujących ruch satelitów i przekazujących informacje do stacji głównej Stacja główna (Master Control Station) zarządza całością systemu, uaktualnia dane nawigacyjne satelitów Stacja kontrolna umieszczania satelitów GPS na orbicie CAP CANAVERAL na Florydzie równik Hawaje Colorado Springs Wyspa Wniebowstąpienia Diego Garcia plik Mercator-proj.jpg w de.wikipedia Kwajalein 131
132 PRARAMETRY ORBITY KEPLEROWSKIEJ a, b duża i mała półoś orbity, e mimośród orbity, i kąt nachylenia płaszczyzny orbity do płaszczyzny równika, rektascenzja węzła wstępującego argument perigeum u argument szerokości anomalia prawdziwa, = u - E anomalia ekscentryczna r(t) promień wodzący satelity apogeum orbita satelity a geocentrum geometria w płaszczyźnie orbity satelity b E r(t) R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) satelita perigeum Interpretacja geometryczna parametrów kierunek do punktu równonocy wiosennej (Barana) X równik niebieski rektascenzja węzła wstępującego węzeł zstępujący ziemia Z r(t) u węzeł wstępujący długość geograficzna węzła wstępującego orbita satelity i satelita anomalia prawdziwa argument szerokości perigeum argument perigeum Y kąt nachylenia płaszczyzny orbity satelity do płaszczyzny równika 132
133 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Współrzędne chwilowe satelity w układzie geocentrycznym Uzyskujemy je po rozwiązaniu równania orbity i transformacji wyników do układu ziemskiego ITRF. Zadanie realizuje się dla ustalonych momentów czasu, ze stałym interwałem h, np. h = 1 sec t i = t o + i * h dla i = 0, 1, 2,., n (i wskaźnik epoki) Obliczenia wykonywane automatycznie w procesorze odbiornika (nawigacja w czasie rzeczywistym) lub przez oprogramowanie zewnętrzne użytkownika. t i t i+1 t i+2 [ X(t i ), Y(t i ), Z(t i ) ] [ B(t i ), L(t i ), H(t i ) ] 133
134 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) STRUKTURY SYGNAŁÓW GPS Modulacja częstotliwości podstawowej ogólna idea:... częstotliwość nośna na bazie zegara atomowego Sygnał kodowy z pseudolosowym szumem. Sygnał fazowy zmodulowany nałożona depesza satelitarna (50 bitów / s) t (wzorzec czasu MHz) Częstotliwość kodu sygnał fazowy (bazowy): s(t) = A sin( t + ) A amplituda kąt na jednostkę czasu przesunięcie fazy Sygnały kodowe i fazowe o dwóch częstotliwościach: KODY / SYGNAŁY FAZOWE Kod C/A (Clear Aquisition) Kod P (Precise, Protected) Sygnał fazowy L1 Sygnał fazowy L2 (Precise) f MHz MHz MHz MHz =c / f C = 293.1m P = 29.31m 1 = cm 2 = cm Finalne sygnały fazowe L1: S L1 (t) = A p P(t) D(t) sin( t + ) + A c C(t) D(t) cos( t + ) (kod P + C/A) L2: S L2 (t) = B p P(t) D(t) sin( t + ) (tylko kod P) gdzie: A p (lub B p ), A c - amplitudy sygnałów kodowych P i C/A, zaś P(t),C(t) odpowiadające modulacje kodowe, D(t) modulacja amplituty dodatkową informacją (depeszą satelitarną) 134
135 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) REFRACJA JONOSFERYCZNA I TROPOSFERYCZNA krzywa refrakcji (opóźniony przebieg fali elektromagnetycznej) refrakcja całkowita [m] = IO + TR odległość geometryczna satelita odbiornik D = D+ Geofizycznie: Jonosfera do 600 km (Termosfera + Egzosfera) Mezosfera do 80 km Stratosfera do 50 km Troposfera do 10 km Jonosfera Troposfera JONOSFERA: obszar zjonizowanych gazów cechuje się obecność swobodnych elektronów, uwolnionych z atomów pod wpływem nadfioletowych promieni słonecznych. Wielkość refrakcji jonosferycznej (opóźnienie) jest odwrotnie proporcjonalna do częstotliwości sygnału fazowego. Stosując pewną kombinację sygnałów dwóch częstotliwości L1, L2 (podobnie w systemach GPS i GLONASS) eliminujemy całkowicie wpływ refrakcji jonosferycznej. Kombinacja ta nazywa się L3 lub IONOFREE. Stosuje się też modele empiryczne tej refrakcji, globalne i lokalne. TROPOSFERA: obszar gazowy zmieniający gęstość optyczną ośrodka, przez który przechodzi fala elektromagnetyczna. Wielkość refrakcji nie zależy już od częstotliwości sygnału. Wyznacza się ją z różnych modeli empirycznych, zależnie m.in. od ciśnienia, wilgotności, temperatury, wysokości n.p.m., kąta odchylenia od zenitu. Modele refrakcji: Hopfield(1969), Saastamoinen, GMF i inne. 135
136 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) ZASADA POMIARU PSEUDO-ODLEGŁOŚCI DO SATELITY r(t) P(t) Odległość satelita odbiornik: r(t) = t c + c - e = P(t) + s - e P(t) pseudo-odległość (obserwacja kodowa), t pomierzony interwał czasu, niesynchroniczność zegarów satelity i odbiornika s korekta pseudo-odległości e błędy systematyczne i losowe s replika kodu satelity w odbiorniku sygnał kodowy z pseudo-losowym szumem > t t t t + t opóźnienie sygnału satelitarnego w odbiorniku oś czasu oscylatora odbiornika 136
137 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Wyznaczenie pozycji bezwzględnej na podstawie pseudo-odległości i P (i) (t) (X,Y,Z) s s Dane: współrzędne satelity o wskaźniku i [X (i) (t), Y (i) (t), Z (i) (t)] oraz pseudoodległości P (i) (t) w epoce (w momencie) t := t o, t 1,, t n t i = t o + k h ; k = 0,1,2,, n np. h = 1 sec. Objaśnienia: P (i) (t) = t (i) c (pseudoodległość) t (i) = t t (i) = mierzony interwał czasu t (i) = moment wysłania sygnału; i = wskaźnik satelity; s = c (niewiadoma korekta) - błąd synchronizacji zegarów satelity i odbiornika (zegar atomowy na satelicie i kwarcowy w odbiorniku) Rozwiązanie: Nieliniowy układ równań o 4 niewiadomych X, Y, Z, s: [(X (i) (t) X) 2 +(Y (i) (t) Y) 2 +(Z (i) (t) Z) 2 ] 1/2 s = P (i) (t) e dla wszystkich dostępnych satelitów (o wskaźnikach i) i epok obserwacyjnych k = 0,1,2,, n e błędy systematyczne i losowe. 137
138 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) GEOMETRYCZNA INTERPRETACJA OBSERWACJI FAZOWYCH centrum fazowe anteny nadawczej sygnału t i+1 t i t i t i N t i+2 N i t i N niewiadoma całkowita liczba cykli fazowych (nieoznaczoność) mierzona liczba cykli fazowych centrum fazowe anteny i N centrum geometryczne punkt wyznaczany (X,Y,Z) wysokość anteny Ponieważ satelita jest w ruchu, więc odbierana faza i sygnału w momencie t i odpowiada wysłanej przez satelitę w momencie t i, gdzie c = d(t i ), c prędkość fali elektromagnetycznej Równanie obserwacji fazowej: D(t i ) = i + N + IO + TR + Ts + TO + A + długość fali sygnału IO, TR refrakcja jono - i troposferyczna TS, TO błędy zegarów satelity i odbiornika, A sumaryczna redukcja antenowa, szum losowy, D(t i ) odległość satelita odbiornik w momencie t i, jako funkcja niewiadomych współrzędnych (X,Y,Z) punktu naziemnego: D(t i ) = [ (X i X) 2 + (Y i Y) 2 + (Z i Z) 2 ] 1/2 (X i, Y i, Z i ) współrzędne satelity w momencie (t i ) - błąd losowy 138
139 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Wyznaczenie wektora GPS z równań różnicowych obserwacji fazowych Różnicowanie faz: ΔΦ1 ij (k) = Φ1 j (k) Φ1 i (k), ΔΦ2 ij (k) = Φ2 j (k) Φ2 i (k) (pojedyncze różnice faz) ΔΔΦ ij (k) = ΔΦ2 ij (k) ΔΦ1 ij (k) (podwójna różnica faz ) ΔΔΔΦ ij (k, l) = ΔΔΦ ij (l) ΔΔΦ ij (k) (potrójna różnica faz ) Układ równań podwójnych różnic faz: ΔΔΦ ij (k) + = f ijk ( X, Y, Z) + N ij + e ijk dla par satelitów (i, j) i momentów (epok) t k gdzie: suma poprawek refrakcyjnych i redukcji antenowych, N ij niewiadoma całkowita funkcja nieoznaczoności (różnica podwójna dla pary satelitów i pary odbiorników) f ij k ( X, Y, Z) nieliniowa funkcja niewiadomych składowych wektora łączącego stacje naziemne e ijk - błąd losowy. Rozwiązanie układu realizuje się metodą najmniejszych kwadratów Komentarze: 1) podwójne różnicowanie faz eliminuje błędy zegarów odbiorników i satelitów. 2) Potrójne różnicowanie faz eliminuje niewiadome nieoznaczoności N ale daje mniej dokładne wyniki 3) dokładność składowych wektora: m zależnie od czasu sesji i długości wektora 139


140 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Przykładowy obraz residuów równań w rozwiązaniu metodą potrójnych różnic faz 140


141 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Przykładowy obraz obserwacji satelitów w sesjach 3h i 12h PRN Interwał = 40s, Ilość epok:
142 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) KLASY ODBIORNIKÓW GNSS Nawigacyjne -pseudoodległościowe z kodem C/A -pseudoodległościowe z kodem C/A i P ~ 30m ~ 3m Precyzyjnego pozycjonowania względnego w oparciu o obserwacje fazowe lub pseudoodległości ~ m -fazowe z kodem C/A (jednoczęstotliwościowe L1) -fazowe z kodem C/A i P (dwuczęstotliwościowe L1, L2) [ w przetwarzaniu sygnałów GPS istnieje analityczna kombinacja obserwacji fazowych L1/L2 prowadząca do eliminacji refrakcji jonosferycznej ]. Kod C/A (Coarse, Clear Aqisition) pseudoprzypadkowy szum 1,023MHz Pod P (Precise) pseudoprzypadkowy szum, 10,23 MHz 142
143 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Zastosowania odbiorników nawigacyjnych GNSS: nawigacja samochodowa w tym logistyka transportu drogowego komunikacja miejska lotnictwo transport morski i wodny ratownictwo lądowe i morskie turystyka w tym żeglarstwo logistyka pocztowa GIS (Geograficzny System Informacji) 143



144 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Odbiornik geodezyjny Trimble R8 Trimble R8 Źródło: TRIMBLE 144
 antena do odbioru sygnałów GPS/GLONASS/GALILEO antena do komunikacji z bazą Podzespoły")

145 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) antena do odbioru sygnałów GPS/GLONASS/GALILEO antena do komunikacji z bazą Podzespoły odbiornika GR-3 (TOPCON) Technologia GPS-GLONASS-GALILEO lekka obudowa gniazdo karty SIM do modemu GSM moduł do bezprzewodowej łączności kontroler diody kontrolne dwie wymienne Baterie moduł zasilający (akumulatory litowojonowe lub baterie adapter do mocowania na tyczce konstrukcja wsporcza anteny Źródło: prospekty firmowe TOPCON 145


146 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe ZINTEGROWANA STACJA POMIAROWA F-MY WILD/LEICA: TEODOLIT+DALMIERZ+ODBIORNIK GNSS antena GNSS antena odbiornika GNSS na statywie, centrowana nad punktem pomiarowym 146

![pl - materiały informacyjne Odbiornik GPS+GLONASS [ 6 + 2 ] wyznacza położenie maszyny i przesyła informację do panelu sterującego.](/docs-images/67/57390734/images/147-1.jpg "Tutaj następuje porównanie danymi pomiarowych (pozycji lemiesza) z wysokością powierzchni wyrównywanej określonej w projekcie cyfrowym inwestycji.")
147 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 5: Naziemne techniki pomiarowe STEROWANIE PRACĄ MASZYN BUDOWLANYCH przykład systemu TOPCON Spycharka 3D GPS,3Dmc 2 Lemiesz źródło: - materiały informacyjne Odbiornik GPS+GLONASS [ ] wyznacza położenie maszyny i przesyła informację do panelu sterującego. Tutaj następuje porównanie danymi pomiarowych (pozycji lemiesza) z wysokością powierzchni wyrównywanej określonej w projekcie cyfrowym inwestycji. W wyniku porównania następuje przesłanie impulsów do układu sterującego hydrauliką, sprawiająć, że lemiesz będzie automatycznie podnoszony lub opuszczany tak, by dla wykonania odpowiednich czynności był ustawiony na wysokości zgodnej z projektem. 147
 STACJE REFERENCYJNE SATELITARNEGO SYSTEMU ASG-EUPOS (Aktywna Sieć Geodezyjna dla obszaru Polski, założona w 2008 r.")
148 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) STACJE REFERENCYJNE SATELITARNEGO SYSTEMU ASG-EUPOS (Aktywna Sieć Geodezyjna dla obszaru Polski, założona w 2008 r.) Stacje główne systemu w Warszawie i Katowicach serwisy pozycjonowania nawigacyjnego i precyzyjnego 148


 Antena: Leica L1/L2 Choke Ring, using DM-T")
149 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Przykładowe wyposażenie stacji. Stacja WROC (źródło: Antena: Leica L1/L2 Choke Ring, using DM-T style (LEIAT504GG LEIS) Odbiornik: Leica GRX1200 GG Pro Czujnik meteorologiczny Paroscientific MET4A 149
150 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Przykład pionowego usytuowania punktów charakterystycznych anteny dla stacji WROC (źródło: ASH / + \ < L2 (centrum fazowe L2) + < L1 (centrum fazowe L1) < TCR Top of Chokering < TGP Top of Ground Plane < BCR Bottom of Chokering x < > Monument => Concrete Pillar Building => < BPA=ARP Bottom of Preamplifier (centrum geometryczne punkt geod.) 150

151 Strona internetowa systemu ASG-EUPOS: R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) 151
152 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Serwisy pozycjonowania systemu ASG-EUPOS Nazwa Dokładność wyznaczenia pozycji [m] Serwisy czasu rzeczywistego (kinematyczne) NAWGIS 1.0 KODGIS 0.25 NAWGEO (RTK) 0.03 [w poziomie] 0.06 [w wysokości] Serwisy postprocessingu (statyczne) POZGEO POZGEO-D m dla odbiorników dwuczęstotliwościowych lub 0.10 dla odbiorników jednoczęstotliwościowych Dokładność zależna od danych użytkownika 152
153 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) ZASADA WYZNACZENIA POZYCJI W SERWISIE POZGEO KWBB centralny serwer w Katowicach lub Warszawie LELO dane obserwacje w formacie RINEX komunikacja internetowa Współrzędne pozycji rover w pliku tekstowym TARG użytkownik elipsa błędu średniego WODZ km rover ŻYWI KRAW Współrzędne pozycji wyznacza się w tzw. automatycznym postprocessingu z wektorów GPS do sześciu najbliższych stacji systemu, w układach: BLH (współrzędne elipsoidalne) 1992 (układ jednostrefowy) 2000 (w jednej z 4 stref) 1965 (w jednej z 5 stref) H 86 (układ wysokości) 153
154 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) POMIARY W CZASIE RZECZYWISTYM - RTK (Real Time Kinematic) Wyznaczenie pozycji z błędem średnim m Odbiór sygnałów fazowych L1, L2 i danych nawigacyjnych Odbiór sygnałów fazowych L1, L2 i danych nawigacyjnych Stacja Referencyjna lub centrum ASG-EUPOS Przybliżona pozycja odbiornika (dla poprawek powierzchniowych lub sieciowych) Przekazywanie poprawek korekcyjnych (RTK) drogą radiową Odbiornik ( Rover ) z modemem GSM/ GPRS *). Kontroler z oprogramowaniem RTK *) GSM Global System for Mobile Communication (Group Special Mobile). GPRS technologia przesyłania pakietów danych General Packet Radio Service 154
155 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) SIEĆ REALIZACYJNA DLA INWESTYCJI KOMUNIKACYJNEJ POMIERZONA TECHNIKĄ GPS z wykorzystaniem serwisu POZGEO-D w systemie ASG-EUPOS Stacja REF. Stacja REF. Obszar inwestycji Moduły objęte pomiarem w jednej sesji przy użyciu 6 odbiorników z parą punktów wspólnych Punkty geodezyjne sieci realizacyjnej Stacja REF. Stacja REF. 155
 Przykład zintegrowanej sieci realizacyjnej dla budowy II linii metra warszawskiego układ stacji referencyjnych, wykorzystanych do pomiaru")
156 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Przykład zintegrowanej sieci realizacyjnej dla budowy II linii metra warszawskiego układ stacji referencyjnych, wykorzystanych do pomiaru podstawowej sieci realizacyjnej dla budowy II linii metra warszawskiego struktura sieci zagęszczającej (klasycznej) I rzędu 156
157 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) Sieć realizacyjna A1 na odcinku: STRYKÓW TUSZYN nawiązana do 5 stacji ASG-EUPOS KUTN Obszar inwestycji LODZ RWMZ SIDZ PITR 157
 ZASADA NIWELACJI SATELITARNEJ Wektor [ΔX, ΔY, ΔZ] ( po uwzględnieniu wysokości anten w A, w B ) przekształcony w wektor linii geodezyjnej [A, s, Δh], gdzie A")
158 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) ZASADA NIWELACJI SATELITARNEJ Wektor [ΔX, ΔY, ΔZ] ( po uwzględnieniu wysokości anten w A, w B ) przekształcony w wektor linii geodezyjnej [A, s, Δh], gdzie A azymut geodezyjny linii, s długość linii, h różnica wysokości elipsoidalnych wysokość normalna A w A wysokość elipsoidalna h A H A A H B w B B powierzchnia topograficzna anomalia wysokości B h B quasigeoida elipsoida H AB = H B H A = (h B B ) (h A A ) = (h B h A ) ( B A ) = h AB AB więc H AB = h AB AB, gdzie h AB różnica wysokości elipsoidalnych z pomiarów satelitarnych AB z numerycznego modelu quasigeoidy (zob. następny rys.) 158
 NUMERYCZNY MODEL POLSKIEJ QUASIGEOIDY (GEOIDY) PL-geoid-2011 Mapa izolinii odstępów quasigeoidy od elipsoidy GRS80 (WGS84) w [m] Różne modele quasigeoidy (geoidy)")
159 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 7: Techniki satelitarne (GNSS) NUMERYCZNY MODEL POLSKIEJ QUASIGEOIDY (GEOIDY) PL-geoid-2011 Mapa izolinii odstępów quasigeoidy od elipsoidy GRS80 (WGS84) w [m] Różne modele quasigeoidy (geoidy) są dostępne w formie siatki punktów o rozdzielczości 0.01 o x 0.01 o { (B ij,l ij, ij ): i = 0,1, 2,, n; j =0, 1, 2,, m } Modele te stosuje się w zadaniach tzw. niwelacji satelitarnej. Interpolacja w oczku siatki i+1,j i+1,j+1 o B i,j i,j+1 L 159
160 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe TEMAT 8: ELEMENTARNE ZADANIA RACHUNKOWE Miary kątowe, jednostki miar, przeliczanie miar Płaski, prostokątny, prawoskrętny układ współrzędnych w geodezji Obliczanie długości i kąta kierunkowego wektora Obliczanie miary kąta ze współrzędnych punktów Obliczenie współrzędnych punktu z pomiaru biegunowego Równanie prostej określonej przez dwa punkty Przecięcie prostych Współrzędne punktu na domiarze prostokątnym Zbiór punktów wyznaczonych metodą domiarów prostokątnych Wcięcie liniowe Wcięcie kątowe w przód Kątowe wcięcie wstecz (zagadnienie Pothenota) Zadgadnienie Hansena Zadania związane z łukami kołowymi Zadanie niwelacji trygonometrycznej Zadanie przestrzennego wcięcia w przód Proste, nadokreślone układy obserwacyjne Obliczanie ciągów poligonowych 160
161 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Miary kątowe - jednostki miar, przeliczanie miar r ł Miara łukowa (radialna): [rad] =( ł / r ) [rad] Jednostka: 1[rad] = 1 : 2 kąta pełnego ( ł = r ) 2 [rad] = miara kąta pełnego Miara stopniowa Jednostki: stopnie [ o ], minuty [ ], sekundy [ ] 1 o = 1/360 kąta pełnego 1 o = 60, 1 = 60 Miara gradowa Jednostki: grady [ g ], centygrady[ c ], decymiligrady [ cc ] 1 g = 1/400 kąta pełnego 1 g = 100 c, 1 c =100 cc Zależności: o : 360 o = [rad] : 2 [rad] = g : 400 g stopnie radiany: o = [rad] o ; o = 180/ = [rad] ; = / = [rad] ; = / grady radiany: g = rad g ; g = 200/ c = [rad] c ; c = / cc = [rad] cc ; cc = / cc stopnie grady: g = o (400 / 360) = o (10 / 9) = o cc = [ / ( )] ( 3) cc 161
162 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Przeliczanie miar kątowych a) [ STOPNIE GRADY] 185 o = (185+25/60+38/3600) o = (2) o (2) o * 400 g /360 o = ( * ) g = g lub równoważnie: 185 o = (185* *60+38) = * (400*100*100) cc /(360*60*60) = cc = g b) [ GRADY STOPNIE] g * 360 o /400 g = (2) o = 185 o m s = 185 o m = część całkowita [ * 60 ] = część całkowita [ ] = 25 s = *60 = c) [ STOPNIE RADIANY], [GRADY RADIANY ] 185 o = (2) o ; (2) o / o = [rad] ( o = 180 o / = o ) g / g = [rad] ( g = 200 g / = g ) d) [ RADIANY STOPNIE ], [ RADIANY GRADY ] [rad] * o = o = 185 o [rad] * g = g 162
163 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Płaski, prostokątny, prawoskrętny układ współrzędnych w geodezji = kąt kierunkowy (azymut topograficzny) A g = azymut geodezyjny = + = zbieżność południków (konwergencja) x A g y x obraz południka elipsoidy styczna do obrazu południka y y x Układ matematyczny (lewoskrętny) 163
164 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Obliczenie długości i kąta kierunkowego wektora B d β φ A IV x I β φ d A B y DANE: x A, y A, x B, y B Szukane: φ, d Φ kąt kierunkowy (azymut topograficzny) wektora (A,B) d = AB długość wektora (A,B) Algorytm: 1 o Przyrosty współrzędnych: Δx = X B X A, Δy = y B y A 2 o Długość wektora: d = (Δx 2 + Δy 2 ) 1/2 III II 3 o Czwartak : β = arc sin ( Δy /d) = arc cos ( Δx /d) B d β A φ A φ β d B 4 o Kąt kierunkowy (w gradach): β g Δx > 0 i Δy 0 (I) 200 g β g Δx 0 i Δy > 0 (II) φ = 200 g + β g Δx < 0 i Δy 0 (III) 400 g β g Δx 0 i Δy < 0 (IV) UWAGA: w algorytmach automatycznych unika się stosowania funkcji tg, ctg, ze względu na możliwą nieokreśloność 164
165 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Obliczanie długości i kątów kierunkowych (azymutów topograficznych) wektorów w układzie geodezyjnym (prawoskrętnym) x y ID X Y Wektor X Y d ćwiartka [m] [m] i j [m] [m] [m] [ g ] [ g ] I II III IV d = X 2 + Y 2 ; = arcsin( Y /d) = arccos( X /d) 165
166 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Obliczenie miary kąta ze współrzędnych punktów x L DANE: współrzędne (x,y) punktów L, C, P ( lewy, centralny, prawy ) Szukana: miara kąta Oznaczenie z identyfikatorami LCP Algorytm ( symbol := oznacza instrukcję podstawiania; miary kątowe w gradach): 1 o : obliczamy kąty kierunkowe CL, CP 2 o : := CP CL 3 o : jeśli <0 wtedy := g CL C L P CP CL y C CP P 166
167 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Obliczanie miary kąta ze współrzędnych x L CP CL Dane: ID x y C L P Szukana miara kąta P C y Obliczamy kąty kierunkowe (podobnie jak w ćwiczeniu 8.02): CL = g CP = g = CP CL +400 g = g Przykładowa kontrola obliczenia kąta (z twierdzenia cosinusów): LP = [ CL 2 + CP 2 2 CL CP cos( ) ] 1/2 CL = CP = LP = Prawa strona wzoru = [ o regułach zaokrągleń operacji arytmetycznych traktuje odrębny wykład ] 167
168 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Obliczenie współrzędnych punktu z pomiaru biegunowego x B DANE: współrzędne (x,y) punktów A,B oraz elementy pomiaru biegunowego (, d ) Szukane: współrzędne punktu P AB d A Algorytm (kolejno obliczane wielkości): 1 o : Kąt kierunkowy AB oraz AP = AB + Jeśli AP 400 g wtedy AP := AP 400 g 2 o : Przyrosty współrzędnych x AP = d cos( AP ) y AP = d sin( AP ) 3 o : Współrzędne: x P = x A + x AP y P = y A + y AP P AP y 168
169 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Obliczanie współrzędnych prostokątnych z pomiaru biegunowego szkic sytuacyjny x B x Dane : (*) Współrzędne punktów A, B: ID x[m] y [m] A B d Wyniki pomiarów biegunowych: i [g] i d i [m] A Szukane: współrzędne punktów 1, 2, 3 d 3 d 2 2 Obliczamy kąt kierunkowy (azymut topo) AB : x AB = y AB = d AB = AB = arccos ( x AB / d AB ) = g AB = 400 g AB = (IV ćwiartka) 3 3 (*) dane i wynikowe wielkości kątowe w gradach (**) odejmujemy kąt pełny jeśli AB + i 400 g 2 y Obliczamy kąty kierunkowe i, przyrosty współrzędnych, współrzędne: i i x Ai y Ai x i y i i = AB + i [ g ] ; (**) x Ai = d i cos ( i ), y Ai = d i sin( i) ; x i = x A + x Ai, y i = y A + y Ai ; 169
170 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Równanie prostej określonej przez dwa punkty x DANE: x A, y A, x B, y B p A AB d AB B Δx AB = x B x A ; Δy AB = y B y A Równanie parametryczne: x = x A + t * cos( AB ) y = y A + t * sin( AB ) gdzie: cos( AB ) = Δx AB /d AB sin( AB ) = Δy AB /d AB t 2 = [(x x A ) 2 +(y y A ) 2 ] Równanie ogólne: y a x + b y = c gdzie: a = Δy AB ; b = Δx AB ; c = x A Δy AB y A Δx AB UWAGA: w algorytmach automatycznych unika się stosowania równania kierunkowego prostej y = a x + b, ponieważ nie opisuje ono wszystkich przypadków - dla prostej równoległej do osi y współczynnik kierunkowy a nie będzie określony. 170
171 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Przykładowe równania parametryczne i ogólne prostych wyznaczonych przez pary punktów Utwórz równanie parametryczne i ogólne prostej m wyznaczonej przez 2 punkty nr x y A B Określamy składowe wektora (A, B) i równoległego wektora jednostkowego (u, v): A B m X AB = X B X A = 92.48; Y AB = Y B Y A = 52.35; d AB = ( X AB 2 + Y AB2 ) 1/2 = u = cos ( AB ) = X AB / d AB = ; v = sin ( AB ) = Y AB / d AB = Równanie parametryczne prostej ma postać: X = X A + t u; X = t Y = Y A + t v; Y = t natomiast równanie ogólne, po wyrugowaniu zmiennego parametru t: ( X ) = (Y ) ( ) (można sobie dalej rozwinąć) Równanie parametryczne prostej z ograniczeniem 0 t d AB stanowi równanie odcinka A-B. 171
172 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Przecięcie prostych C x n B C DANE: x A,y A, x B,y B, x C,y C, x D,y D D B m P (?) P (?) A y A m ROZWIĄZANIE: n DEFINICJA ZADANIA: P = m n a 1 x + b 1 y = c 1 a 2 y + b 2 y = c 2 (m) (n) D W = a 1 b 2 a 2 b 1 ; W x = c 1 b 2 c 2 b 1 ; W y = a 1 c 2 a 2 c 1 ; W=0 : proste równoległe W 0 : x = W x / W, y = W y / W 172
173 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Położenie wzajemne dwóch odcinków prostych - przykład m A B P D Równania odcinków <A, B>, <C, D> odpowiednich prostych m, n (rysunek) są następujące: Odcinek <A, B > m X = X A + t m C m = t m ( ) Y = Y A + t m S m = t m < t m < d AB = m Odcinek < C, D > n X = X C + t n C n = t n Y = Y C + t n S n = t n < t n < d CD = m x C Wykazać, że definiowane odcinki nie mają punktu wspólnego, jakkolwiek proste przecinają się (w punkcie P). n P = m n < A, B > m, < C, D > n < A, B > < C, D > = y Istotnie, punkt przecięcia prostych wynika z rozwiązania układu równań (po przyrównaniu współrzędnych punktu z równań dwóch prostych): t m t n = t m t n = Proste m, n przecinają się w punkcie, dla którego parametry równań wynoszą: t m = ; t n = Widzimy, że t m = < 0,d AB > więc P <A, B> tzn. odcinki <A,B> i <C, D> nie mają punktu wspólnego. Po wstawieniu parametrów do równań prostych wyznaczymy współrzędne punktu P: x P = y p = z równania prostej m z równania prostej n (o błędach zaokrągleń będzie mowa w innym wykładzie) 173
174 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Współrzędne punktu na domiarze prostokątnym x DANE: x A,y A, x B, y B, p, q Szukane: (x S,y S ), (x Q,y Q ) m A AB p S q Q B Równanie parametryczne prostej AB: x = x A + t cos( AB ); y = y A + t sin( AB ) cos( AB ) = Δx AB /d AB ; sin( AB ) = Δy AB /d AB Współrzędne punktu S (dla t = p): x S = x A + p cos( AB ); y S =y A + p sin( AB ) Równanie parametryczne prostej SQ: x = x S + t cos( AB + /2)= x S t sin( AB ); y = y S + t sin( AB + /2)= y S + t cos( AB ) Współrzędne punktu Q (dla t = q): x Q = x S q sin( AB ); y Q = y S + q cos( AB ) y x Q = x A + p cos( AB ) q sin( AB ) y Q = y A + p sin( AB ) + q cos( AB ) 174
175 x R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Zbiór punktów wyznaczonych metodą domiarów prostokątnych B p Obliczenie współrzędnych (x,y) przez transformację konforemną współrzędnych lokalnych (p,q) 2(p 2,q 2 ) AB A y q 1 (p 1,q 1 ) i (p i,q i ) Odcięte p i i rzędne q i traktujemy jako współrzędne punktów w prostokątnym układzie lokalnym o osiach p, q i początku w punkcie A. Rzędne na lewo względem AB są ujemne, na prawo dodatnie. Zakładamy, że punkty A,B mają współrzędne w układzie mapy, A (x A, y A ), B(x B,y B ) oraz odpowiednio w układzie terenowym: A(0, 0), B(p B, 0). Przekształcenie (*) x i = x A + k [p i cos( AB ) q i sin( AB )] y i = y A + k [p i sin( AB ) + q i cos( AB )] nazywa się transformacją konforemną układu (p,q) na układ (x,y); symbolicznie: (p,q) (x,y), gdzie: k lokalny współczynnik zmiany skali układu mapy względem układu terenowego, k = ( x AB2 + y 2 AB ) 1/2 /p B Przy założeniu k =1 wzory (*) określają transformację izometryczną 175
176 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Obliczenie pomiarów metodą ortogonalną (domiarów prostokątnych) x Dane i wyniki obliczeń lokalny układ domiarów prostokątnych Układ współrzędnych mapy ID p q x y A B współczynnik skali k k = x AB2 + y AB 2 / p B = / = y współczynniki kierunkowe cos( AB ) = x AB / d AB = sin ( AB ) = y AB / d AB = Transformacja płaska konforemna: x i = (p i q i ) y i = (p i q i ) 176
177 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Wcięcie liniowe a) x A a p q P(?) b B p DANE: A(x A,y A ), B(x B, y B ), a, b Szukane: P(x P,y P ); Uwaga: Ponieważ rozwiązaniem może być zarówno punkt P jak też punkt P więc dla definicji jednoznacznej potrzeba dodatkowej informacji. Przyjmujemy pomocniczy (lokalny, prawoskrętny) układ współrzędnych o początku w punkcie A i osi p zgodnie równoległej do wektora (AB). Rozwiązanie jednoznaczne określamy podając znak algebraiczny wpółrzędnej q punktu wyznaczanego (ujemny dla P i dodatni dla P ) b) x q q P(?) -p a Drugie rozwiązanie y P b B A p Rozwiązanie Obliczamy lokalne współrzędne p, q punktu P z układu równań: q 2 + p 2 = a 2 q 2 + ( AB p) 2 = b 2 Odejmując stronami otrzymamy po redukcjach: p = (a 2 b 2 + AB 2 ) / (2 AB ) Wtedy q = (a 2 p 2 ) 1/2 (dla punktu P ) lub q = (a 2 p 2 ) 1/2 (dla punktu P) Ostatecznie liczymy współrzędne punktu wyznaczanego jak z domiarów prostokątnych: x P = x A + p cos( AB ) q sin( AB ) y P = y A + p sin( AB ) + q cos( AB ) P q y 177
178 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Przykładowe zadanie wcięcia liniowego x P Dane są współrzędne punktów A, B oraz boki a, b trójkąta APB (zakładamy, że trójka punktów jest uporządkowana zgodnie ze wskazówkami zegara). Określić współrzędne punktu P. a b p x [m] y [m] A B B a = m b = m A c Rozwiązanie: c = AB = p = (a 2 b 2 + c 2 ) / (2 c) = q = (a 2 p 2 ) 1/2 = q y Składowe wektora kierunkowego prostej AB cos( AB ) = ; sin( AB ) = Szukane współrzędne punktu: x P = x A + p cos( AB ) q sin( AB ) = y P = y A + p sin( AB ) + q cos( AB ) = Dla kontroli obliczamy ze współrzędnych długość boku a = AP otrzymując jak w danych:
179 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Kątowe wcięcie w przód x a) P t 1 t 2 DANE: Kąty:, Punkty: (a): A(x A, y A ), B(x B, y B ), (b): A(x A, y A ), B(x B, y B ), C(x C, y C ), K(x K,y K ) Szukany punkt P(x P, y P ) A y AB P B BA ROZWIĄZANIE: Równania parametryczne prostych wcinających x = x A + t 1 cos( AP ); y = y A + t 1 sin( AP ); (1) x = x B + t 2 cos( BP ); y = y B + t 2 sin( BP ); (2) (zad. a): AP = AB ; BP = BA + = AB +180 o + ; (zad. b): AP = AK ; BP = BC Układ równań x b) A B t 1 cos( AP ) t 2 cos( BP ) = x B x A = x AB t 1 sin( AP ) t 2 sin( BP ) = y B y A = y AB W = sin( AP ) cos( BP ) sin( BP ) cos( AP ) = sin( AP BP ) W 1 = x AB sin( BP ) y AB cos( BP ) W 2 = x AB sin( AP ) y AB cos( AP ) t 1 = W 1 / W; t 2 = W 2 / W Podstawiając do (1) i (2) wyznaczamy współrzędne x P,y P (podwójnie, z kontrolą wewnętrzną rozwiązania) y K C Kontrola: (BPA) (oblicz ze współrzędnych punktów i kątów kierunkowych AP, BP ) 179
180 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Przykładowe zadanie wcięcia kątowego w przód y B P Dane: ID x y A = 75 g 46 c 50 cc B = 148 g 38 c 90 cc C D Szukane: współrzędne x, y punktu P. m D A C n x Rozwiązanie: Kąty kierunkowe prostych m, n : AP = AB + ; CP = CD + ; AB = g ; CD = g (zob. ćwiczenie 8.02) AP = g ; CP = ; Równania parametryczne prostych: m: x = x A + t 1 cos( AP ) = t y = y A + t 1 sin( AP ) = t n: x = x C + t 2 cos( CP ) = t y = y C + t 2 sin( CP ) = t 2 ( ) Przecięcie prostych (zob. ćwiczenie 8.06): t t = t t = t 1 = t 2 = x P = y P = Kontrola miary kąta wierzchołkowego: = CPA = g (ze współrzędnych zob. ćwicz. 8.03) = AP CP = (z kątów kierunkowych) 180
181 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Kątowe wcięcie wstecz (zagadnienie Pothenota) x A B C P P y Dane: A(x A, y A ), B(x B, y B ), C(x C, y C ),, Szukany punkt P(x P, y P ) Uwaga: aby rozwiązanie zadania było jednoznaczne, punkty A, B, C, P nie mogą leżeć na jednym okręgu (zob. dalej) 181
182 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Kątowe wcięcie wstecz c.d. ogólne rozwiązanie zadania jako przecięcie się dwóch okręgów (warunek: 0 i 0 ) x A a B r 1 O 1 r 1 r 2 O 2 r 2 b C P y Układ równań dwóch okręgów: (x x 1 ) 2 + (y - y 1 ) 2 = r 1 2 [ r 1 = (½) a / sin( ) ] (x x 2 ) 2 + (y - y 2 ) 2 = r 2 2 [ r 2 = (½) b / sin( ) ] O 1 (x 1,y 1 ), O 2 (x 2,y 2 ) - środki okręgów (zob. następny rysunek jak liczymy ich współrzędne). W rozwiązaniu otrzymujemy punkty P i B (drugi pomijamy jako dany). Istnieje wiele szczegółowych sposobów rozwiązania wcięcia wstecz. 182
183 x R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Kątowe wcięcie wstecz c.d. obliczenie współrzędne środków okręgów B-A = A-B o A a 90 o B B-O1 = B-A (90 o ) r 1 r 1 O 1 90 o O 2 r 2 C y P C-B = B-C o C-O2 = C-B (90 o ) Współrzędne środków okręgów O 1 : x 1 = x B + x B-O1 = x B + r 1 cos( B-O1 ) = x B + r 1 sin( B-A + ) y 1 = y B + y B-O1 = y B + r 1 sin( B-O1 ) = y B r 1 cos( B-A + ) O 2 : x 2 = x C + x C-O2 = x C + r 2 cos( C-O2 ) = x C + r 2 sin( C-B + ) y 2 = y C + y C-O2 = y C + r 2 sin( C-O2 ) = y C r 2 cos( C-B + ) 183
184 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Kątowe wcięcie wstecz c.d. rozwiązanie finalne przez wcięcie liniowe x B (x B,y B ) O 1 (x 1,y 1 ) r 1 r 1 r 2 p q P (?) y r 2 O 2 (x 2, y 2 ) DANE: współrzędne środków okręgów O 1 (x 1,y 1 ), O 2 (x 2, y 2 ) i promienie r 1,r 2 Współrzędne punktu P wyznaczamy z wcięcia liniowego, jak w innym zadaniu: Obliczamy p i q z zależności p 2 +q 2 = r 1 2 (a p) 2 + q 2 = r 2 2 gdzie a = O 1 O 2 (obliczamy ze współrzędnych) Stąd po odjęciu stronami otrzymamy: a a p = r 1 2 r 2 2 => p = (r 1 2 r 2 2 +a 2 )/(2 a) [! a 0 ] q = (r 1 2 p 2 ) 1/2, następnie obliczamy współrzędne punktu jak z domiarów prostokątnych. 184
185 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Kątowe wcięcie wstecz c.d. przypadki szczególne i warunki rozwiązania jednoznacznego Wcięcia słabo określone Wcięcie określone niejednoznacznie jeśli wszystkie 4 punkty leżą na jednym okręgu (okrąg jest miejscem geometrycznym rozwiązań) Wcięcie dobrze określone Kryterium praktyczne poprawności technicznej: > 30 (miara odchylenia od równoległości stycznych) 185
186 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Bezpośrednie wzory na współrzędne punktu wciętego wstecz (wzory wynikają z połączenia zadania wyznaczenia środków okręgów i wcięcia liniowego) 2 Dane: (x 1, y 1 ), (x 2, y 2 ), (x 3, y 3 ),, 1 O 1 + P + O 2 3 Finalne wzory na rozwiązanie zadania kątowego wcięcia wstecz mają postać (istnieją też inne, równoważne w skutkach, formuły algorytmiczne tego zadania): gdzie: x P = x 2 + w p y P = y 2 + w q p = U 1 sin( ) + U 2 sin( ); q = V 1 sin( ) V 2 sin( ); w = ( U 1 V 2 U 2 V 1 ) / ( p 2 + q 2 ) U 1 = (x 2 x 1 ) cos( ) + (y 2 y 1 ) sin( ); V 1 = (x 2 x 1 ) sin( ) + (y 2 y 1 ) cos( ); U 2 = V 2 = (x 3 x 2 ) cos( ) + (y 3 y 2 ) sin( ); (x 3 x 2 ) sin( ) (y 3 y 2 ) cos( ); O poprawności technicznej wcięcia decyduje kąt ostry pod jakim przecinają się okręgi. Jeśli oznaczymy 1 = O 1 P O 2 miarę kąta pomiędzy normalnymi do okręgów w punkcie P, to = min ( 1, 180 o 1 ). Na ogół wymagamy, by 30 o. 186
187 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Przykładowe zadanie wcięcia kątowego wstecz 2 P Dane: ID x [m] y [m] = g = g Obliczamy wielkości pomocnicze: 1 3 U 1 = (x 2 x 1 ) cos( ) + (y 2 y 1 ) sin( ) = V 1 = (x 2 x 1 ) sin( ) + (y 2 y 1 ) cos( ) = U 2 = (x 3 x 2 ) cos( ) + (y 3 y 2 ) sin( ) = V 2 = (x 3 x 2 ) sin( ) (y 3 y 2 ) cos( ) = p = U 1 sin( ) + U 2 sin( ) = q = V 1 sin( ) V 2 sin( ) = w = ( U 1 V 2 V 1 U 2 ) / (p 2 + q 2 ) = Promienie okręgów: r 1 = r 2 = Współrzędne środków okręgów: ID x y O O g (ok.!) Współrzędne punktu wyznaczanego: x P = x 2 + w p = = y P = y 2 + w q = = Kontrola: zgodność kątów, z miarami obliczonymi ze współrzędnych odpowiednich punktów 1, 2, 3, P 187
188 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Zagadnienie Hansena Dane: punkty A(x A,y A ), B(x B,y B ); kąty,,, Szukane: współrzędne punktów P, Q Rozwiązanie (wykluczamy współliniowość trójek punktów). Biorąc pod uwagę zależności w trójkątach (z twierdzeń sinusów i kosinusów): PQ / sin( + + ) = AP / sin( ); PQ / sin( + + ) = BP / sin( + ); AB 2 = AP 2 + BP 2 2 AP BP cos( ) i rugując długości AP, BP dostaniemy zależność: PQ = AB [ 1/ (,,, ) ] 1/2, gdzie funkcja (,,, ) = [ sin( ) / sin( + + ) ] 2 + [ sin( + ) / sin( + + ) ] 2 2 [ sin( ) / sin( + + ) ] [ sin( + ) / sin( + + ) ] cos( ) (alternatywnym sposobem może być końcowe wykorzystanie trójkąta A-B-Q albo trójkątów powstałych w wyniku z przecięcia się prostych AQ i BP). Teraz już łatwo obliczamy pozostałe elementy liniowe i kątowe trójkątów, a następnie potrzebne kąty kierunkowe AP, BQ (korzystając z kąta kierunkowego AB ) oraz odpowiadające przyrosty współrzędnych wektorów (A, P) i (B, Q), a na koniec współrzędne punktów P i Q. Kontrolą rachunków może być obliczenie długości PQ ze współrzędnych punktów P i Q i sprawdzenie jej zgodności z miarą wyznaczoną niezależnie z podanego wyżej wzoru. 188
189 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Zadanie Hansena Dane: współrzędne: ID x [m] y [m] A B kąty: = g = g = g = g Rozwiązanie: obliczamy długość i kąt kierunkowy wektora (A, B) z danych współrzędnych punktów (por. ćwiczenie 8.02) : AB = m AB = g obliczamy kolejno długości (por. wcześniej opis zadania): PQ = AB [ 1/ (,,, ) ] 1/2 = = m (,,, ) = [ sin( ) / sin( + + ) ] 2 + [ sin( + ) / sin( + + ) ] 2 2 [ sin( ) / sin( + + ) ] [ sin( + ) / sin( + + ) ] cos( ) = = AP = PQ sin( ) / sin( + + ) = AQ = PQ sin( + ) / sin( + + ) = BQ = PQ sin( ) / sin( + + ) = BP = PQ sin( + ) / sin( + + ) = kąty przy punktach A, B i kąty kierunkowe AP, BQ : B-A-P = g (z trójkąta A-B-P) Q-B-A = g (z trójkąta A-B-Q) AP = AB + B-A-P = g BQ = AB +200 g Q-B-A = g przyrosty współrzędnych i współrzędne wynikowe x AP = AP cos( AP ) = x P = x A + x AP = y AP = AP sin ( AP ) = y P =y A + y AP = x BQ = BQ cos( BQ ) = x Q = x B + x BQ = y BQ = BQ sin ( BQ ) = y Q =y B + y BQ = Kontrola : Długość ze współrzędnych wynikowych: PQ =
190 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Łuki kołowe i proste styczne obliczenie współrzędnych (x,y) punktów styczności zadanie 1 x A P T R /2 O W w S f /4 c/2 E /4 F K DANE: współrzędne punktów A(x A, y A ), B(x B, y B ), W(x W, y W ), i promień okręgu R Szukane: Współrzędne punktów P, K Algorytm (miary kątowe w gradach): 1 o Obliczamy kąt i =200 g 2 o Długość odcinka stycznej T = PW = KW = R tg( /2) 3 o Współrzędne punktów P, K jako punktów na prostych, odpowiednio: WA i WB y B Inne związki geometryczne: c = PK = 2 R sin( /2) (cięciwa) ; PE = EK = FK = c/2; f = SE = SF = R R cos( /2) = R [1 cos( /2)] = 2 R sin 2 ( /4) (strzałka łuku); w = WO R = R/cos( /2) R = R [1/cos( /2) 1] 190
191 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Łuki kołowe i proste styczne zadanie 2 x W DANE: współrzędne punktów A(x A, y A ), B(x B, y B ), W 1 (x W1, y W1 ), W 2 (x W2, y W2 ), i promień okręgu R A P W 2 W 1 S f c/2 E /4 R /2 Inne związki geometryczne: c = PK = 2 R sin( /2) (cięciwa) ; PE = EK = = c/2; f = SE = R R cos( /2) = R [1 cos( /2)] = =2 R sin 2 ( /4) (strzałka łuku); O y K B Szukane: Współrzędne punktów P, K, S Algorytm (miary kątowe w gradach): 1 o Obliczamy kąt z różnicy kątów kierunkowych prostych W 1 A i W 2 B oraz =200 g 2 o Długość W 1 W 2 oraz miary kątów, ze współrzędnych punktów danych 3 o Odcinki W W 1 i W W 2 z rozwiązania trójkąta W-W 1 -W 2. 4 o Długości odcinków stycznych PW 1 = R tg( /2) W W 1 KW 2 = R tg( /2) W W 2 5 o Współrzędne punktów P, K jako punktów na prostych, odpowiednio: W 1 A i W 2 B. Współrzędne punktu S jak w zadaniu 1 lub jako punktu na domiarze prostokątnym (c/2, -f) względem bazy PK 191
192 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe x Łuk koszowy Zadanie 1 A p r 1 B s 1 O 1 KONTROLA = 180 o ; = kąt między prostymi KC i PA czyli różnica kątów kierunkowych: = PA KC Kąty kierunkowe liczymy ze współrzędnych odpowiednich punktów P y O C S r2 W q s 2 K DANE: współrzędne punktów A(x A, y A ), B(x B, y B ) długości odcinków p, q promienie okręgów r 1, r 2 długości łuków okręgów s 1, s 2 Szukane: Współrzędne punktów P, K, S, C Algorytm (obliczamy kolejne wielkości): 1 o Współrzędne P jak punktu na prostej AB o odciętej p 2 o Współrzędne O 1 jak punktu na domiarze prostokątnym (p, r 1 ) 3 o Miary kątów 1 = s 1 /r 1 [rad]; 2 = s 2 /r 2 [rad] 4 o Współrzędne punktów O 2 i S metodą biegunową biorąc orientację kątową 1 względem bazy Q 1 P i odpowiednie odległości: O 1 O 2 = r 1 r 2, O 1 S =r 1 ; 5 o Współrzędne punktu K metodą biegunową, biorąc orientację kątową względem 2 bazy O 2 S i odległość O 2 K =r 2. 6 o Współrzędne punktu C jako punktu na domiarze prostokątnym (r 2,q) 192
193 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe x Łuk koszowy Zadanie 2 A p P W 1 r 1 B s 1 O 1 KONTROLA Sprawdzamy wartość kąta z zależności = PA KC Kąty kierunkowe liczymy ze współrzędnych odpowiednich punktów O y T 1 C S r2 W q s 2 T 2 K D W 2 DANE: współrzędne punktów A, B, C, D promienie okręgów r 1, r 2 stosunek długości łuków k = s 1 / s 2 Szukane: Współrzędne punktów P, K, S, O 1, O 2 Algorytm (tu miary kątowe w stopniach): 1 o Obliczamy kąty kierunkowe BA, DC ze współrzędnych punktów danych oraz kąt = BA DC 2 o Kąty 1, 2 z zależności = 180 o ; 1 = k 2 skąd 2 = (180 ) / (1+k); 1 = k 2 3 o Współrzędne punktu W jako punktu przecięcia się prostych BA i DC 4 o Długości odcinków stycznych T 1 = r 1 tg( 1 /2); T 2 = r 2 tg( 2 /2); 5 o Długości odcinków W W 1 = (T 1 +T 2 ) sin( 2 ) / sin( ) W W 2 = (T 1 +T 2 ) sin( 1 ) / sin( ) 6 o Współrzędne punktów P i W 1 na prostej WA oraz punktów K i W 2 na prostej WC 7 o Współrzędne punktu S na prostej W 1 W 2, natomiast współrzędne O 1, O 2 podobnie jak w zadaniu
194 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Kątowe wcięcie przestrzenne w przód : P z B Dane: x A,y A,H A, x B,y B,H B i A, i B, z A, z B, α, Szukane: x P, y P, H P i A A z A b α P a B i B B Algorytm: 1 o Rozwiązujemy zadanie płaskiego, kątowego wcięcia w przód uzyskując współrzędne x P, y P 2 o Wysokość punktu P (H P ) określamy metodą niwelacji trygonometrycznej, dla kontroli dwukrotnie, tj. z punktów A i B. Dla jednoznacznego rozwiązania zadania wystarczy pomiar jednego kąta zenitalnego. Możliwość niezależnej kontroli jest elementem niezawodności konstrukcji pomiarowej 194
195 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Pośrednie wyznaczenie wysokości instrumentu punkt główny instrumentu (przecięcie trzech osi) łata pozioma celowa i O B H B H A B A Dane: H A, H B, O B (odczyt na łacie) Znana jest wysokość znaku oraz wysokość pobliskiego punktu, na którym ustawiamy łatę i dokonujemy na niej odczytu przy poziomej osi celowej ewentualnie w dwóch położeniach lunety, eliminując ewentualny błąd miejsca zera kręgu pionowego. Wysokość instrumentu wyznaczamy ze wzoru: i = H B + O B H A 195
196 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Kątowe wcięcie przestrzenne w przód : H S 1 S i 1 i 2 x y S 2 S 2 4 Dane: współrzędne płaskie (x, y) i wysokości H punktów S 1, S 2 stanowisk oraz wysokości instrumentu i 1, i 2 na stanowiskach: ID x [m] y [m] H [m] i [m] S S pomiary kątowe do punktów obiektu: Stanowisko S 1 Stanowisko S 2 Cel Hz V Cel Hz V S S Szukane: współrzędne i wysokości punktów obiektu Rozwiązanie: Dla każdego z punktów obiektu rozwiązujemy płaskie zadanie kątowego wcięcia w przód (por. zadanie 8.09), a następnie z każdego stanowiska zadanie niwelacji trygonometrycznej (por. zadanie 5.2). Elementy bazy wcięcia ze współrzędnych: długość d s1,s2 = m, kąt kierunkowy s1,s2 = g Kąty kierunkowe wektorów wcinających: S1, k = S1, S2 k ; k = Hz(S 1 S 2 ) Hz(S1 k); S2, k = S2,S1 + k ; k = Hz(S 2 k) Hz(S 2 S 1 ); k=1,2,3,4. Współrzędne x i, y i punktów obiektu obliczamy z wcięcia w przód, następnie długości poziome d S1, k i d S2, k ze współrzędnych. Niwelacja trygonometryczna z założeniem długości poziomych i z uproszczeniem - bez poprawek na krzywiznę Ziemi i refrakcję: H k = H S1 + i 1 + d s1, k ctg(v s1, k ) H k = H S2 + i 2 + d s2, k ctg(v s2, k ); Ostateczne wartości wysokości uśrednione. Wynikowe wartości współrzędnych I x y H
197 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Przykłady prostych konstrukcji sieci geodezyjnych z elementami nadwymiarowymi / kontrolnymi trójkąt błędów wcięcie kątowe w przód z elementem kontrolnym ciąg poligonowy otwarty efekt błędów pomiarowych punkt o zadanych współrzędnych x,y punkt wyznaczany pomierzona długość pomierzony kąt ciąg poligonowy zamknięty odchyłka liniowa Występujące elementy kontrolne (pomiary dodatkowe) sprawiają, że układ równań określający zależności pomiędzy wszystkimi pomiarami a niewiadomymi współrzędnymi punktów jest na ogół układem matematycznie sprzecznym. Aby doprowadzić do rozwiązania jednoznacznego dokonujemy tzw. wyrównania obserwacji. Podamy sposób przybliżonego wykonania zadania na przykładzie ciągu poligonowego. 197
198 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ciąg poligonowy otwarty - wyrównanie kątów x 01 umowne uporządkowanie punktów A (0) B (1) 3 y 5 Obliczenie sumy teoretycznej kątów 12 = 01 (200 g 1 ) 23 = 12 (200 g 2 ) 34 = 23 (200 g 3 ).. n,n+1 = n-1,n (200 g n ) n,n+1 = 01 + i n 200 g C C (6) (n) Obliczenie sum kątów, odchyłki kątowej w ciągu i wyrównanie kątów: 67 S (suma teoretyczna) S = i (suma kątów pomierzonych) f = S S (odchyłka kątowa w ciągu) f f max (odchyłka dopuszczalna) i = i f / n (kąty wyrównane) D (7) (n+1) Według oznaczeń na rysunku będzie: S = i = CD AB + n 200 g i - oznaczenie dokładnych (bezbłędnych) miar kątów (i = 1,2,, n) i = S (kontrola) 198
199 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ciąg poligonowy otwarty (cd) - obliczenie i wyrównanie przyrostów współrzędnych; obliczenie współrzędnych x 01 umowne uporządkowanie punktów A (0) B (1) B d 12 2 d 23 4 d34 d45 3 y d 56 C (6) (n) 67 D (7) (n+1) Przyrosty współrzędnych x i,i+1 = d i,i+1 cos( i,i+1 ) y i,i+1 = d i,i+1 sin( i,i+1 ) Kąty kierunkowe: 01 = AB ; n,n+1 = CD liczone ze współrzędnych punktów nawiązania, a pozostałe na podstawie kątów wyrównanych. Sumy przyrostów współrzędnych: S X = x i,i+1 ; S Y = y i,i+1 (obliczone) S X = X C X B ; S Y = Y C Y B (teoretyczne) Odchyłki: f x = S X S X ; f y = S Y S Y f L = (f 2 x + f y2 ) 1/2 (wypadkowa, liniowa) f L f Lmax (dopuszczalna wg konwencji) Wyrównanie (korygowanie) przyrostów współrzędnych: x i,i+1 = x i,i+1 f x C i,i+1 ; y i,i+1 = y i,i+1 f y C i,i+1 ; C i,i+1 = d i,i+1 / d i,i+1 (współczynniki rozdziału wielkości poprawek proporcjonalnie do długości) 199 Obliczenie współrzędnych: X i+1 = X i + x i,i+1 ; Y i+1 = Y i + x i,i+1
200 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 8: Elementarne zadania rachunkowe Ćwiczenie rachunkowe Obliczenie ciągu poligonowego zamkniętego (z przykładową orientacją kątową) x K x = y = = g x = y = A-21 = A-K + 400g = g A y 23 Objaśnienia: ~ suma danych empirycznych! suma teoretyczna (miar bezbłędnych) f odchyłka kątowa f x, f y odchyłki współrzędnych poprawka dla pojedynczego kąta = f / n x, y poprawki do przyrostów współrzędnych f L odchyłka liniowa ciągu = f x2 +f 2 y Sposób określenia odchyłek maksymalnych f max, f L max będzie podany w innym temacie. Kolorem niebieskim zapisano dane wejściowe, na czerwono wartości poprawek ID kąt [ g ] kąt_kier. [ g ] d [m] x [m] y [m] x [m] y [m] ID A A A A ~ ~ ! ! f f f max f x, f y f L = (f 2 x + f y2 ) 1/2 = f L max -6 cc < f / n x, y -1mm +(2-3)mm < proporcjonalnie do długości 200
201 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji TEMAT 9: PODSTAWY TEORII BŁĘDÓW I WYRÓWNANIA OBSERWACJI Proces pomiarowo obliczeniowy, propagacja błędów i ich wpływ na wynik Klasyfikacja błędów pomiarów (obserwacji) w aspekcie przyczynowo skutkowym Zmienne losowe - wprowadzenie Parametry podstawowe zmiennej losowej wartość oczekiwana, wariancja, odchylenie standardowe Model probabilistyczny pomiaru (obserwacji) i błędu pomiaru Modele błędów pomiarów o różnych dokładnościach Funkcje zmiennych losowych i ich wartości oczekiwane Zmienne losowe dwu- i wielowymiarowe, dyskretne i ciągłe Wektory i macierze losowe, macierz wariancyjno-kowariancyjna Uogólnione prawo propagacji wariancji Prawo propagacji wariancji dla funkcji skalarnej n zmiennych niezależnych Wprowadzenie do pojęcia estymatora i estymaty Własności estymatorów Dowody nieobciążoności prostych estymatorów Prawo przenoszenia się błędów średniokwadratowych dla obserwacji niezależnych i przykłady zastosowań Średnia ważona (ogólna) i jej zastosowania Metoda najmniejszych kwadratów na przykładach zastosowań Szacowanie błędów maksymalnych i ich propagacji Reguły Kryłowa-Bradisa oceny błędu zaokrągleń w operacjach arytmetycznych 201
202 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Proces pomiarowo obliczeniowy, propagacja błędów i ich wpływ na wynik X* P~ X~ O~ Y~ Zbiór cech mierzalnych pewnego obiektu Proces pomiarowy Zbiór wyników pomiarów (obserwacji) Obliczenia (przetwarzanie danych) Zbiór cech użytkowych obiektu Objaśnienia: Obiektem pomiaru może być np. osnowa geodezyjna. Elementami pomiaru mogą być np. kąty, długości odcinków, wektory GNSS, różnice wysokości. Cechami użytkowymi mogą być np. współrzędne x, y i wysokości H punktów osnowy. Symbol ~ oznacza, że procesy pomiarowo - obliczeniowe nie są idealne i dają w wyniku wielkości obarczone błędami. Cechy wynikowe charakteryzują się błędem skumulowanym pod wpływem różnych czynników zakłócających występujących zarówno w procesie pomiarowym, jak też obliczeniowym, e = e + e +. Błędy prawdziwe nie są na ogół wielkościami dokładnie poznawalnymi ale staramy się je szacować za pomocą różnych parametrów dokładności, definiowanych na modelach probabilistycznych błędów i wyznaczanych empirycznie, w oparciu o odchyłki pomiarów w układach nadokreślonych (układy, w których liczba pomiarów przewyższa liczbę wyznaczanych parametrów). 202
203 eliminowane z wyników pomiarów R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Klasyfikacja błędów pomiarów (obserwacji) w aspekcie przyczynowo skutkowym Błędy grube (omyłki). Powodują istotne deformacje wyników procesu pomiarowo - obliczeniowego. Niekiedy mogą być dostrzegane (i wykrywane) wprost w czasie trwania pomiaru i bezpośrednio eliminowane. Podstawą do wykrycia i wyeliminowania błędu grubego jest stosowanie w układach pomiarowych elementów kontrolnych, które decydują o niezawodności i poprawności technicznej układu. Błędy systematyczne. Dokładne poznanie warunków pomiaru (technicznych, fizycznych,geometrycznych) pozwala na wyeliminowanie takiego błędu lub uwzględnienie w miarach obserwacji w formie poprawki: l = l, gdzie: l - miara poprawiona, l obserwacja, - błąd systematyczny jako poprawka wyznaczana w funkcji pewnych czynników mierzalnych (temperatury, czasu), = f(a,b, ). Przykładem może być pomiar długości taśmą mierniczą, której faktyczna długość zależy od temperatury. Poprawka termiczna jest sumowana z tzw. poprawką komparacyjną, wynikającą z porównania przymiaru z wzorcem metra (komparacji) w pewnej temperaturze t o. Eliminujemy więc błędy systematyczne wprowadzając różnego rodzaju redukcje (fizyczne, geometryczne). W przypadku pominięcia takich redukcji możemy się spodziewać wadliwych wyników procesu pomiarowo obliczeniowego. Błędy przypadkowe (losowe, nieuniknione). Wartości i znaku nie możemy określić. W analizie tych błędów stosujemy modele prawdopodobieństwa (rozkłady prawdopodobieństwa zmiennych losowych jakimi są błędy pomiarów). Podstawowe modele zakładają, że P( <0)=P( >0) ale też monotoniczność w tym sensie, że błędy bezwzględnie małe są bardziej prawdopodobne niż błędy bezwzględnie duże (model Gaussa Laplace a). 203
204 Zmienne losowe - wprowadzenie R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Zmienne losowe (jednowymiarowe) w ogólności to zmienne o wartościach liczbowych reprezentujących wyniki jakiegoś doświadczenia (eksperymentu), przy czym zbiorowi możliwych wyników i jego podzbiorom jest przyporządkowana jednoznacznie miara prawdopodobieństwa. Zmienne losowe dzielą się na dyskretne (skokowe) lub ciągłe. Zmienne losowe dyskretne obejmują skończony lub przeliczalny zbiór wartości, x ={x 1, x 2,. }, którym przypisane jest prawdopodobieństwo p i = p(x i ) (i =1,2, ): p 1 +p 2 + = 1 (rys. a). Przykładem zmiennej dyskretnej, nieco oderwanym od tematu pomiaru, może być wynik rzutu kostką do gry. Możliwym wynikom doświadczenia nadajemy zwykle wartości liczbowe x i = i (i=1,2,, 6) z jednakowymi prawdopodobieństwami p i = 1/6. Zmienne losowe ciągłe (rys. b) mogą przyjmować wartości z pewnego przedziału lub całej osi liczbowej, przy czym prawdopodobieństwo jest mierzone za pomocą tzw. funkcji gęstości rozkładu prawdopodobieństwa. a) b) p i =1 f(x) - funkcja gęstości rozkładu prawdopodobieństwa f(x) dx = f(x) dx =1 - + p 1 p 2 p n x 1 x 2 x n x f(x)=0 x a b p(a x b) = f(x) dx a b f(x)=0 204
205 Parametry podstawowe zmiennej losowej wartość oczekiwana Wartość oczekiwana (średnia spodziewana, nadzieja matematyczna) zmiennej losowej x oznaczana jest symbolem E(x) (ang.: average). Dla zmiennych dyskretnych wyraża się: E(x) = x 1 p 1 + x 2 p 2 + = x i p i (mówimy inaczej, że jest to średnia ważona, a wagi prawdopodobieństwami). Wartością oczekiwaną dla rzutu kostką sześcienną (x i =i; p(x i )=1/6; i =1,2,, 6) jest liczba 3½, bo E(x) = 1 1/ / / / / /6 = ( ) (1/6) = 3½ (rys. a). Dla zmiennych losowych ciągłych wartość oczekiwaną definiujemy analogicznie (zastępując sumowanie całką oznaczoną): E(x) = x f(x)dx R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji (w szczególności mogą być granice niewłaściwe) Przykładowo, dla zmiennej losowej o funkcji gęstości f(x) = const. = 1/(b a) w przedziale <a,b> i 0 poza tym przedziałem (rozkład jednostajny prawdopodobieństwa) (rys. b). Wartość oczekiwana wynosi: E(x) = x f(x) dx = x f(x) dx = (b a) 1 [x 2 /2] + a b b a = (a+b)/2 a) p 1 = p 2 = = p 6 =1/6 b) 1/6 p(x <a,b>)=1 f(x) = 1/(b a) x E(x) = 3½ a b x E(x) =(a+b)/2 205
206 Parametry podstawowe zmiennej losowej miary rozproszenia Wariancja zmiennej losowej x oznaczana jest symbolem V(x) (ang.: variance) wyraża się: lub V(x) = [x i E(x)] 2 p i (dla zmiennych losowych dyskretnych) (rys. a) V(x) = [x E(x)] 2 f(x)dx (dla zmiennych losowych ciągłych) (rys. b) + R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Twierdzenie: wariancja jest wartością oczekiwaną zmiennej y= [x E(x)] 2 : V(x)= E{[x E(x)] 2 }. Odchylenie standardowe (ang.: standard deviation): D(x) = [ V(x) ] 1/2 Dla przykładu - rzut kostką sześcienną: V(x) =(1/6) [(1 3½) 2 + (2 3½) 2 +(3 3½) 2 +(4 3½) 2 +(5 3½) 2 +(6 3½) 2 ] 2.417; D(x) 1.56 Dla drugiego przykładu (funkcja gęstości stała w przedziale < a, b> ): V(x) = (b a) 1 [x (a+b)/2] 2 dx = (b a) 1 z 2 dz = (b a) 2 / 12; D(x) ½ (b a) a b (a-b)/2 (b-a)/2 Oznaczenia pomocnicze: x* = E(x), =D(x) ( 2 = V(x) lub D 2 (x) = V(x) ) a) p(x <x*, x*+ ) 4 1/6 =2/3 x* b) 1/6 f(x)=1/(b a) x a b x x* x*+ x* x* x*+ p(x <x*, x*+ >)
207 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Model probabilistyczny pomiaru (obserwacji) i błędu pomiaru ( = l l *, l pomiar (obserwacja), l* - miara dokładna) - funkcja gęstości rozkładu normalnego Gaussa - Laplace a f( ) 0 + l* l funkcja gęstości: 1 f( ) = exp( 2 ) 2 c 2 c 2 spełnia warunek + f( ) d =1 Inne własności: f( ) = f( ) (parzystość) max f( ) = f(0) = (2 c 2 ) 1/2 wartość oczekiwana: wariancja: odchylenie standardowe: błąd + E( ) = f( ) d = 0 + V( ) = 2 f( ) d = c 2 = V( ) = c obserwacja + E(l ) = l f(l l*) dl = l* + V(l )= (l l*) 2 f(l l*) dl = c 2 =V(l) (l) = V(l ) = c = prawdopodobieństwa charakterystycznych przedziałów błędu: p( < ) 0.68; p( < 2 ) 0.95; p( < 3 ) 0.99 Przybliżenie empiryczne odchylenia standardowego nazywa się błędem średniokwadratowym, 207 błędem średnim, dyspersją lub niepewnością (w fizyce) oznaczamy je literą
208 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Modele błędów pomiarów o różnych dokładnościach Standaryzowana funkcja gęstości dla t = / : dp = f( ) d = (t) dt gdzie: (t) = f( t) ; dt = d / (t) Jeśli 1 > 2 to pomiar drugi jest dokładniejszy. Standaryzacja: zamiana zmiennej na t = / Podstawiając = t; d = dt otrzymamy: f( ) d = f( t) dt = (t) dt = 1 Za pomocą tablicowanej całki (t) = (t) dt 0 t liczymy prawdopodobieństwa przedziałów błędu p ( k ) = p ( t k) = 2 (k) t 1 t ( t ) = exp( 2 ) E(t ) = t (t) dt = 0 + V(t ) = t 2 (t) dt = 1 = V(t ) = 1 p( t 1) 0.68 p( t 2) 0.95 p( t 3)
209 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Funkcje zmiennej losowej i ich wartości oczekiwane Niech y = g(x) będzie funkcją ciągłą zmiennej losowej x. Załóżmy na wstępie, że x jest zmienną ciągłą o gęstości prawdopodobieństwa f(x). Oznaczmy ogólnie h(y) gęstość prawdopodobieństwa zmiennej przekształconej y. Gęstość ta jest określona pod warunkiem równości różniczkowych przyrostów prawdopodobieństw f(x) dx = h(y) dy Uwzględniając powyższe w definicji wartości oczekiwanej otrzymamy zależność E(y) = y h(y) dy = E(g(x)) = g(x) f(x) dx Pozwala ona określać wartości oczekiwane zmiennej wynikowej y = g(x) bez konieczności wyznaczenia jej gęstości prawdopodobieństwa h(y). Analogiczny wzory dotyczyć będą zmiennych losowych dyskretnych x = {x 1, x 2,.}, a mianowicie: y = {y 1 = g(x 1 ), y 2 = g(x 2 ),. } zmienna wynikowa, p(x i ) = p(y i ) oraz E(y) = y i p(y i ) = g(x i ) p(x i ) + Przykłady wartości oczekiwanych funkcji zmiennej losowej E(a x+b) = a E(x)+b ; E(x 2 ) = x 2 f(x)dx ; E([x E(x)] 2 )= (x E(x)) 2 f(x)dx
210 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Zmienne losowe dwuwymiarowe, dyskretne, skończone z = (x, y) symboliczny układ par wartości (x i, y j ) w tablicy prostokątnej o n wierszach i m kolumnach x x i q j = p 1j +p 2j + +p nj = P(y =y j ) P(x=x i, y=y j ) = p ij prawdopodobieństwo, że zajdzie równocześnie: x=x i i y=y i p i = p i1 +p i2 + +p im = P(x=x i ) Niezależność zmiennych losowych jeśli p ij = p i q j (jak dla iloczynu zdarzeń niezależnych) y j y Zbiór wartości zmiennych x = (x 1,, x n ), y=(y 1,,y m ); z = {(x i,y j ): i =1,,n; j = 1,,m} Rozkład prawdopodobieństwa: P(x =x i, y=y j ) = p ij : p ij =1 Wartości oczekiwane: x* = E(x) = x i p i ; y* = E(y) = y j q j ; Wariancje: x 2 = V(x) = (x i x*) 2 p i ; y 2 = V(y) = (y j y*) 2 q j ; Kowariancja: xy = Cov(x,y) = (x i x*) (y j y*) p ij = yx = Cov(y,x) (miara skorelowania zmiennych). Mówimy, że zmienne są nieskorelowane jeśli xy = 0 ( yx = xy =0). Jeśli zmienne x i y są niezależne to są nieskorelowane (twierdzenie odwrotne nie jest prawdziwe) xy = Cov(x,y)= (x i x*) p i (y j y*) q j = E(x x*) E(y y*) = 0 0 = 0 ; 210
211 (1. rzut) (1. rzut) R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Proste przykłady zmiennych losowych dwuwymiarowych, dyskretnych Dwukrotny rzut monetą Z = (x, y) Z = {(x i, y j ): i, j = 1,2 }= {(0,0),(1,0),(0,1),(1,1)} Ilustracja (możliwe wyniki): x x 2 =1 q 1 = ½ q 2 = ½ p 21 =¼ p 22 =¼ p 2 = ½ Dwukrotny rzut kostką sześcienną Z = (x, y) Z = {(x i, y j ): i, j = 1,,6 } (36 par ) Ilustracja (możliwe wyniki): x q3=1/6 p 53 = 1/36 p5=1/6 x 1 =0 p 11 =¼ p 12 =¼ p 1 = ½ y 1 =0 y 2 =1 y (2. rzut) zmienne skalarne x, y niezależne: p ij = p i q j = (½ ) (½)= ¼ (p i = ½ ; q j = ½ ) E(x)=x*= 0 ½ + 1 ½ = ½ ; E(y)= y* = ½ V(x) = x2 = E[(x x*) 2 ]=( ½) 2 (½)+(½) 2 (½) x2 = y2 = ¼ => x = y = ½ Kowariancja: xy = yx = E{(x x*) (y y*)}= = [ (x i ½) (¼)] [ (y i ½) (¼)]= 0 0 = y (2. rzut) zmienne skalarne x,y niezależne p ij = p i q j = (1/6) (1/6) = 1/36 E(x) = x* = 3½ ; E(y) = y* = 3½ x = y xy = 0
212 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Dwuwymiarowe zmienne losowe ciągłe f(x,y) f(x, y) dwuwymiarowa funkcja gęstości, dp = f(x,y) dx dy (elementarny przyrost prawdopodobieństwa) + f(x,y) dx dy = 1 + (warunek rozkładu prawdopodobieństwa) y x Dla zmiennych niezależnych będzie f(x,y) = f 1 (x) f 2 (y) dp = f(x,y) dx dy = [ f 1 (x) dx ] [f 2 (y) dy ] + gęstości brzegowe: f 1 (x) = f(x,y) dy ; f 2 (y) = f(x,y) dx ; + wartości oczekiwane: x* = E(x) = x f 1 (x) dx ; y* = E(y) = y f 2 (y) dy + wariancje: x2 =V(x)= E[(x x*) 2 ]= (x x*) 2 f 1 (x) dx ; y2 = V(y)= E[(y y*) 2 ]= (y y*) 2 f 2 (y) dy; kowariancja xy = Cov(x, y) = E [(x x*) (y y*)] = (x x*) (y y*) f(x,y) dx dy Dla zmiennych losowych niezależnych: xy = Cov(x, y) = E [(x x*)] E [(y y*)] = 0 0 =
 x 3 Zbiór wartości: n wymiarowa siatka hiper-prostopadłościenna zbudowana na")
213 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Dyskretne zmienne losowe n - wymiarowe, y = (x 1, x 2,, x n ) x 3 Zbiór wartości: n wymiarowa siatka hiper-prostopadłościenna zbudowana na zbiorach wartości X i ={x ik : k=1,2,, m i }, ( i =1,2,, n), gdzie m 1, m 2, m n rozmiary krawędzi siatki (liczebności zbiorów skalarnych). W tym znaczeniu zbiorem wartości Y zmiennej y jest produkt kartezjański Y = X 1 X 2 X n (zbiór wszystkich n wyrazowych ciągów o elementach należących do kolejnych zmiennych skalarnych). x 2 x 1 n=3 m 1 =m 2 = m 3 = 4 Rozkład prawdopodobieństwa: P (x 1,x 2,..., x n ): (x 1,x 2,,x n ) Y ; P(x 1,,x n ) = P(Y) = 1 Dla zmiennych niezależnych P(Y) = P(X 1 ) P(X n ); P(X i ) = P(x ik ) (suma po k =1,2,, m i ) Wartości oczekiwane: x i * = E(x i ) = x ik P(x ik ) (suma po k = 1,2,, m i ) Wariancje: i2 =V(x i )= E[(x i x i *) 2 ] = (x ik x i *) 2 P(x ik ) (suma po k = 1, 2,, m i ) Kowariancje: ij = Cov(x i, x j ) = E[(x i x i *) (x j x j *)] = (x ik x i *) (x jl x j *) P(x ik, x jl ) ( sumy po k = 1, 2,, m i, l = 1,2,, m j ) Dla zmiennych niezależnych P(x ik, x jl ) = P(x ik ) P(x jl ) oraz ij = 0 (i, j =1,2,, n) Przykład: n - krotny rzut kostką sześcienną (m 1 =m 2 = =m n = 6). y = (x 1, x 2,, x n ) Y ; układ zmiennych niezależnych; 6 n - liczba elementów zbioru Y ; prawdopodobieństwo zdarzenia elementarnego P(x 1,x 2,,x n ) = P(x 1 ) P(x 2 ) P(x n )= (1/6) n ; x i {1,2,, 6}; P = P(x 1 ) P(x 2 ) P(x n ) = 6 n (1/6) n = 1 213
214 Ciągłe zmienne losowe n - wymiarowe, y = (x 1, x 2,, x n ) Gęstość prawdopodobieństwa f (x 1,x 2, x n ) : f (x 1,x 2, x n ) dx 1 dx 2 dx n = 1 Dla zmiennych niezależnych f (x 1,x 2, x n ) = f 1 (x 1 ) f 2 (x 2 ) f n (x n ); Różniczkowy przyrost prawdopodobieństwa n-wymiarowej zmiennej losowej wyraża się wtedy jako iloczyn różniczkowych prawdopodobieństw zmiennych skalarnych (zgodnie z formułą iloczynu prawdopodobieństw zdarzeń niezależnych): dp = f (x 1,x 2, x n ) dx 1 dx 2 dx n = f 1 (x 1 ) dx 1 f 2 (x 2 ) dx 2 f n (x n ) dx n = dp 1 dp 2 dp n ; Wartości oczekiwane: R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Skalarne: x i * = E(x i ) = x i f i (x i ) dx i (dla i = 1, 2,, n) Wartość oczekiwana n-wymiarowej zmiennej losowej jest uporządkowanym zbiorem (ciągiem) wartości oczekiwanych zmiennych skalarnych: y* = (x 1 *, x 2 *,, x n *) Wariancje: i2 =V(x i )= E[(x i x i *) 2 ] = (x i x i *) 2 f i (x i ) dx i (dla i = 1, 2,, n) Kowariancje: ij = Cov(x i, x j ) = E[(x i x i *) (x j x j *)] = (x i x i *) (x j x j *) f ij (x i,x j ) dx i dx j Dla zmiennych niezależnych f ij (x i, x j ) = f i (x i ) f j (x j ) oraz ij = 0 (i, j =1,2,, n) Uporządkowany zbiór wariancji i kowariancji zmiennej losowej n-wymiarowej tworzy macierz wariancyjno-kowariancyjną tej zmiennej (c.d.n). 214
215 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Wektory i macierze losowe, macierz wariancyjno - kowariancyjna (m. kowariancyjna). Zmienną losową n wymiarową nazywamy też wektorem losowym. Tę nazwę stosujemy w notacji macierzowej. Mogą to być wektory wierszowe lub kolumnowe, na przykład X = x 1 x 2 : x n zapisywane też ogólnie z podaniem rozmiaru: [x i ] (n 1) (jako macierz jednokolumnowa). Pojęcie wektora losowego uogólnia się także do tablic prostokątnych, czyli macierzy losowych, A = [a ij ] (m n). Wartość oczekiwaną wektora losowego określamy jako wektor wartości oczekiwanych składowych tego wektora: E(X) = [E(x i )] (n 1) = X* = [ x i* ] (oznaczamy: X* = E(X), x i * = E(x i ) ) Wariancje i 2 dla składowych zmiennej losowej (i = 1,2,,n) oraz kowariancje ij dla wszystkich par składowych tego wektora zbieramy do formuły macierzy wariancyjno kowariancyjnej (krócej: macierzy kowariancyjnej) wektora losowego: n Cov(X) = : : : n1 n2 2n n 2 = E[(X X*) (X X*) T ] = [ E (x i x i *) (x j x j *) ] (n n) ij = ji (macierz kowariancyjna jest symetryczna) 215
216 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Uogólnione prawo propagacji wariancji. Rozważmy przekształcenie liniowe wektorów losowych Y = A X, gdzie A = [ a ij ] (m n) - macierz współczynników; X = [x j ] (n 1), Y = [y i ] (m 1) wektory losowe. Dana jest wartość oczekiwana i macierz kowariancyjna wektora X : E(X) = X*, Cov(X). Analogiczne parametry zmiennej wynikowej Y mają postać: E(Y) = A E(X) oznaczamy: E(Y) = Y* = [y i *] (m 1) = A X* y i * = E(a i1 x 1 + a i2 x a in x n ) = a i1 E(x 1 ) + a i2 E(x 2 ) + + a in E(x n ) = = a i1 x 1 * + a i2 x 2 * + + a in x n * = a ik x k * dla i=1,2,, m (w twierdzeniu powyższym wykorzystano określone wcześniej zależności dotyczące prostych funkcji zmiennej skalarnej oraz własność, że wartość oczekiwana sumy zmiennych losowych równa się sumie wartości oczekiwanych tych zmiennych: Jeśli z = x 1 +x 2 + +x n to E(z) =E(x 1 )+E(x 2 )+ +E(x n ) ). Macierz kowariancyjna wektora wynikowego Y ma postać: Cov(Y) = A Cov(X) A T Korzystamy z własności skalarnych zmiennych losowych (jak powyżej), które prowadzą do : E[(Y Y*) (Y Y*) T ] = E[A (X X*) (X X*) T A T ] = A E[(X X*) (X X*) T ] A T Zależność powyższa nosi nazwę uogólnionego prawa propagacji wariancji 216
217 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Prawo propagacji wariancji dla niezależnych zmiennych skalarnych Jeśli wektor losowy X ma składowe niezależne, a skutkiem tego kowariancje zerowe (składowe nieskorelowane), to jego macierz kowariancyjna jest oczywiście diagonalna: Cov(X) = n 2 = diag [ 2 i : i = 1, 2,, n] Oznaczmy wynikową macierz kowariancyjną przekształcenia liniowego Y = A X C = Cov(Y) = [c ij ] (n n) wówczas elementy tej macierzy wyrażą się wzorami c ij = a ik 2 k 2 dla i = j (wariancje) a ik a jk k 2 dla i j (kowariancje) (sumowania po k = 1, 2,, n). Oznacza to, że składowe wektora wynikowego Y będą na ogół skorelowane, za wyjątkiem szczególnej struktury macierzy A, dla której kowarancje, czyli elementy c ij dla i j przyjmą wartości zerowe. 217
218 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Przykład wyznaczenia wariancji i kowariancji dla funkcji obserwacji (pseudoobserwacji): Niech l 1, l 2, l 3 będą obserwacjami niezależnymi pewnej wielkosci w* w serii jednorodnej: - dane odchylenie standardowe pojedynczej obserwacji. Średnia arytmetyczna w = (l 1 +l 2 +l 3 ) / 3 będzie mieć odchylenie standardowe: w = / 3 (wg. prawa propagacji wariancji) Utwórzmy dwie nowe zmienne losowe jako funkcje obserwacji (pseudoobserwacje): x = (l 1 +l 2 )/2; y = (l 2 +l 3 )/2 i wyznaczmy elementy macierzy kowariancyjnej wektora Z = [ x, y ] T : Pomiędzy błędami prawdziwymi zachodzą zależności liniowe: e x = (e 1 +e 2 )/2 ; e y = (e 2 +e 3 )/2 (e 1, e 3, e 3 błędy kolejnych obserwacji) Z definicji wariancji i kowariancji, uwzględniając własności wartości oczekiwanej: 2 x = E(e x2 ) = (1/4) E(e e e 1 e 2 ) = = (1/4) E(e 12 )+ E(e 22 ) + 2 E(e 1 e 2 ) = (1/4) ( ) = 2 / 2 ; 2 y = E(e y2 ) = 2 /2 (wariancje) xy = E(e x e y ) = E[ ¼ (e 1 e 2 + e 1 e 3 + e e 2 e 3 )] = = ¼ ( ) = 2 /4 (kowariancja) Macierz kowariancyjna wektora Z : x 2 xy 1 ½ Cov(Z) = = (½) 2 yx y 2 ½ 1 218
219 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Prawo propagacji wariancji dla funkcji skalarnej n zmiennych niezależnych Załóżmy, że oprócz niezależności składowych wektora X w przekształceniu liniowym Y = A X wektor Y jest jednoelementowy, a więc przekształcenie przyjmie postać: y = a 1 x 1 + a 2 x a n x n (gdyby przekształceniem była nieliniowa funkcja n zmiennych to tworzymy liniową formę różniczkową, w której współczynnikami są pochodne cząstkowe). Macierz kowariancji zmiennej wynikowej y sprowadza się do pojedynczej wariancji y 2 zmiennej y, a prawo propagacji wariancji do formuły: y 2 = a a a n 2 n 2 = a i 2 i 2 i=1 n lub n y = a i 2 i 2 i=1 Gdyby składowe wektora X nie były niezależne to ostateczny wzór musiałby uwzględniać niezerowe kowariancje: y 2 = a i 2 i a i a j ij i=1 n Przykład 1: Niech y = (1/n) x i średnią arytmetyczną zmiennych niezależnych o jednakowych wariancjach, 1 2 = 2 2 = = n 2 = o 2. Zgodnie z powyższym wzorem będzie: n i<j y 2 = (1/n) 2 o (1/n) 2 o 2 = n (1/n) 2 o 2 = o 2 / n y = o / n (średnia arytmetyczna jest n 1/2 razy dokładniejsza niż pojedynczy pomiar) 219
220 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Wprowadzenie do pojęcia estymatora i estymaty Seria pomiarów jednakowo dokładnych. Wykonujemy serię pomiarów (obserwacji) l 1, l 2,, l n pewnej wielkości (np. kąta, długości) zakładając, że każdy elementarny pomiar jako zmienna losowa charakteryzuje się tym samym modelem probabilistycznym (pomiary wykonane tym samym przyrządem, w identycznych warunkach fizycznych), ale podstawowe parametry tego modelu, czyli wartość oczekiwana x*= E( l i ) oraz wariancja 2 = E[( l i x*) 2 ] nie są a priori znane. Zazwyczaj jako wielkość przybliżającą nieznaną wartość oczekiwaną x* przyjmujemy średnią arytmetyczną: x = ( l i ) / n x* (średnia arytmetyczna) Stanowi ona najprostszy przykład estymatora. W ogólności estymatorem jakiegoś niewiadomego parametru jest pewna funkcja obserwacji: f ( l 1, l 2,, l n ), która ma tę własność, że w miarę wzrostu liczby n obserwacji, zbliżenie wartości funkcji do niewiadomego parametru jest prawdopodobnie lepsze (? - zob. dalej). Wartość liczbowa funkcji f nazywa się estymatą. Typowym estymatorem wariancji 2 jest natomiast wariancja empiryczna 2 liczona z wzoru: 2 = [ (l i x ) 2 ] / (n 1) = ( e i2 ) / (n 1) 2 Wzór ten znaczyłby średni kwadrat odchylenia pomiaru od średniej, e i = l i x, gdyby w mianowniku nie było (n 1) lecz n. O tym, dlaczego dzielenie przez (n 1) jest lepsze decydują pewne własności estymatorów, które dalej objaśniamy. Pierwiastek kwadratowy z wariancji empirycznej, czyli nazywa się błędem średniokwadratowym, a także (w geodezji) błędem średnim. 220
221 Własności estymatorów R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Niech oznacza pewien niewiadomy parametr opisowy zmiennej losowej, zaś n = f(l 1, l 2,, l n ) estymator tego parametru w funkcji obserwacji l 1, l 2,, l n jako pewnych zmiennych losowych. Ponieważ estymator jest funkcją zmiennych losowych, więc sam jest też zmienną losową o jakimś rozkładzie prawdopodobieństwa. Wyróżnia się następujące klasy estymatorów: Estymatory zgodne (stochastycznie zbieżne) Estymatory nieobciążone Estymatory najefektywniejsze Estymatory asymptotycznie najefektywniejsze Estymatorem zgodnym nazywamy taki estymator n, dla którego lim P( n < ) =1 n gdzie jest dowolnie małą liczbą dodatnią. Inaczej mówiąc, w miarę wzrostu liczby obserwacji prawdopodobieństwo (P), że estymator jest bliski parametrowi estymowanemu, zmierza do 1. Zgodność albo inaczej, stochastyczna zbieżność, jest podstawową cechą wymaganą od estymatorów. Dowodzenie tej własności, nawet dla najprostszych estymatorów, wymaga użycia tzw. twierdzeń granicznych rachunku prawdopodobieństwa, które tutaj je pomijamy. Estymator nazywamy nieobciążonym jeśli (jako zmienna losowa), ma wartość oczekiwaną E( n ) równą estymowanemu parametrowi, czyli jeśli E( n ) =. Estymator najefektywniejszy to w klasie estymatorów nieobciążonych taki, który ma najmniejszą wariancję. Estymator asymptotycznie najefektywniejszy ma analogiczną własność w granicy przy n. Dalej podamy proste przykłady estymatora nieobciążonego i najefektywniejszego. 221
222 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Dowody nieobciążoności prostych estymatorów Nieobciążoność średniej arytmetycznej Załóżmy że l 1, l 2,, l n są zmiennymi losowymi o jednakowych wartościach oczekiwanych E(l i ) = x*. Średnia arytmetyczna x = ( l i ) / n jest nieobciążonym estymatorem parametru x*, ponieważ zgodnie z założeniem będzie: E(x) = E[( l i )/n] = (1/n) E(l i ) = (1/n) n x* = x* (!) i i Nieobciążoność wariancji empirycznej Załóżmy że l 1, l 2,, l n są niezależnymi zmiennymi losowymi o jednakowych wartościach oczekiwanych E(l i ) = x* i wariancjach V(l i ) = E[(l i x*) 2 ]= E( i2 ) = 2, gdzie i = l i x* oznacza błąd obserwacji. Wykażemy, że tzw. wariancja empiryczna 2 = [ (l i x) 2 ] / (n 1), którą już wcześniej zapisaliśmy, jest nieobciążonym estymatorem wariancji ~ 2 (gdyby w mianowniku było n nie byłoby tej własności). Szukamy wartości oczekiwanej estymatora wariancji: E( 2 ) = E[ (l i x) 2 /(n 1) ] = [1/(n 1)] E[ (l i x) 2 ] = [1/(n 1)] E[ (l i x*+x* x) 2 ] i i Przekształćmy najpierw sumę S = (l i x*+x* x) 2 ] podstawiając x x* = [ (l k x*)]/n = ( k ) / n i S = { i 2 2 i ( k )/n + [( k )/n] 2 } = i 2 ( i ) 2 /n = [(n 1)/n] ( i 2 2 i j ) i k k Ponieważ obserwacje są niezależne więc E( i j ) = 0 dla i j stąd E(S) = [(n 1)/n] n 2. Ostatecznie mamy: E( 2 ) = [1/(n 1)] (n 1) 2 = 2 (!) i i k i i<j k 222
223 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Własności i kryteria dobroci estymatorów: największa efektywność Estymator n parametru, określony na zbiorze niezależnych zmiennych losowych x 1, x 2,, x n o wartościach oczekiwanych E(x i ) = nazywamy estymatorem liniowym, jeśli wyraża się on funkcją liniową n = a 1 x 1 + a 2 x a n x n. Aby estymator liniowy był estymatorem nieociążonym potrzeba, by był spełniony warunek a 1 + +a n =1. Z liniowej zależności wynika bowiem, że E( n ) = (a 1 + +a n ) więc dla spełniania warunku nieobciążoności E( n ) =, współczynnik przy musi być jednością. Rozpatrując kolejną własność ograniczymy się tylko do tej klasy estymatorów. Powiemy, że estymator liniowy i nieobciążony jest najefektywniejszy, jeśli w zbiorze wszystkich estymatorów liniowych i nieobciążonych ma on najmniejszą wariancję, czyli jeśli V( n ) = E [( n ) 2 ] = min E{[a 1 x 1 + a 2 x a n x n ] 2 ] (a 1,,a n ): a 1 + +a n =1 Niech niezależne zmienne losowe x 1, x 2,, x n mają równe wartości oczekiwane E(x i ) = x* i niekoniecznie równe wariancje V(x i ) = E[(x i x*) 2 ] = i2. Określmy wariancję ogólnego estymatora liniowego x = a i x i : V(x) = E[( a i x i x*) 2 ] z założeniem a i =1. Stosując definicje otrzymamy V(x) = E{ [ a i (x i x*)] 2 } = a i 2 i 2 (składniki z kowariancjami zerują się wobec założenia o niezależności obserwacji). Znajdujemy teraz minimum tej funkcji względem parametrów a i pod warunkiem, że suma ich jest 1. Warunek ten łatwo uwzględnimy podstawiając np. a 1 = 1 a 2 a n. Wtedy minimalizowane wyrażenie przyjmie postać: 1 2 (1 a 2 a n ) 2 + a a n2 n 2. Pochodna cząstkowa względem a i (dla i >1) przyrównana do zera daje równanie: (1 a 2 a n ) 1 2 = a i i 2. Zachodzi więc proporcja a i i 2 = a j j 2 oraz rozwiązanie a i = w i / w i gdzie: w i = ( 1/ i2 ) const. (waga obserwacji). Estymatorem najefektywniejszym jest więc tzw. średnia ważona, gdzie wagi są odwrotnie 223 proporcjonalne do wariancji. Dla równych wag będzie to średnia arytmetyczna.
224 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Ćwiczenie rachunkowe 9.1. Średnia arytmetyczna i jej dokładność Wykonano serię 10 pomiarów jednakowo dokładnych tego samego kąta (jednakowa dokładność oznacza, że w świetle naszej wiedzy o pomiarach nie ma podstaw do jakiegokolwiek różnicowania jakościowego pomiarów). Należy obliczyć wartość średnią miary kąta, jej błąd średniokwadratowy, a także błąd średniokwadratowy pojedynczego pomiaru. Dane i wyniki obliczeń: i x i [ g ] x i x o [ cc ] v i =x s x i v i X 0 = x s = = (średnia) 0 = 10.1 [ cc ] s = 3.2 [ cc ] WZORY: Średnia: x s = ( x i )/n = x o + ( x i )/n n = liczba obserwacji x o = założona wartość przybliżona pomocnicza wielkość przesunięcia początku skali. Obserwacje przesunięte (skrócone): x i = x i x o ; i = 1, 2,, n Poprawki (definiowane ze znakiem przeciwnym nazywamy też odchyłkami lub błędami pozornymi): v i = x s x i ; i = 1, 2,,n Kontrola obliczeń: v i =0 Błąd średniokwadratowy pojedynczego pomiaru: 0 = ( v i 2 ) / (n 1) Błąd średniokwadratowy średniej arytmetycznej (na podstawie prawa propagacji wariancji): s = 0 / n 224
225 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Ćwiczenie rachunkowe 9.2. Średnia ogólna (ważona) i jej dokładność Załóżmy teraz, że dane z ćwiczenia 9.1 stanowią serię pomiarów niejednakowo dokładnych, a każdemu z nich przyporządkowano a priori wartość błędu średniokwadratowego. Należy obliczyć średnią ogólną (ważoną), jej błąd średniokwadratowy, a także błąd średniokwadratowy tzw. obserwacji typowej (o wadze jednostkowej). Dane i wyniki obliczeń: i x i [ g ] i p i x i p i x i v i p i v i p i v i X 0 = x s = *(5.6674/0.1207)= = = (średnia ogólna) 0 = (wartość niemianowana) s = 1.8[ cc ] WZORY: Średnia ogólna: x s = ( p i x i )/ ( p i ) = x o + ( p i x i )/ ( p i ) waga obserwacji: p i = const. 1/ i 2 założone błędy średnie: i (i =1,2,, n) x o = założona wartość przybliżona pomocnicza wielkość przesunięcia początku skali. Obserwacje przesunięte (skrócone): x i = x i x o ; i=1,2,,n Poprawki: v i = x s x i ; i=1,2,,n Kontrola obliczeń: p i v i =0 Błąd średniokwadratowy obserwacji o wadze 1: 0 = ( p i v i 2 ) / (n 1) Błąd średniokwadratowy średniej ogólnej (na podstawie prawa propagacji wariancji): s = 0 / p i 225
226 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Prawo przenoszenia się błędów średniokwadratowych dla obserwacji niezależnych Dane: y = f (x 1, x 2,, x n ); f C 1 { ( x i, i ): i=1,2,,n } (zbiór obserwacji i odpowiadających błędów średnich) Stosujemy prawo propagacji wariancji, podstawiając w miejsce teoretycznych wariancji kwadraty błędów średnich. y = f f f n 2 n 2 = f i 2 i 2 f 1, f 2,, f n pochodne cząstkowe funkcji względem kolejnych zmiennych Przykład 1: błąd średniokwadratowy (średni) pola trójkąta przy założonych błędach średniokwadratowych pomiarów długości boków a, b i kąta α Dane: a a b b α α a α S b S = ½ a b sin(α) = f (a, b, α) (funkcja pola) Pochodne cząstkowe: f a = ½ b sin(α) ; f b = ½ a sin(α); f α = ½ a b cos(α); α = cc α / cc cc = P = f 2 a 2 a + f b2 2 b + f α2 2 α 226
227 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Ćwiczenie rachunkowe 9.3. Zastosowanie prawa przenoszenia się błędów średnich 12 a Hz 1 b c 13 Na stanowisku S pomierzono metodą biegunową dwa punkty sytuacyjne, oznaczone 12,13 (zob. szkic i dane). Pytanie: z jaką dokładnością (mierzoną błędem średniokwadratowym) będzie określona trygonometrycznie miara czołowa c = 12, 13? Z twierdzenia cosinusów mamy: c = f(a, b, ) = a 2 +b 2 2 a b cos( ) S Hz 2 Stąd odpowiednie pochodne cząstkowe funkcji f [2 a 2 bcos( )] f a = = [a b cos ( )] /c 2 a 2 +b 2 2 a b cos( ) Dane: Hz 1, Hz 2 odczyty na kręgu poziomym: = Hz 2 Hz 1 Hz 1 = g 20 cc Hz 2 = g 20 cc a = m a = m (umowny symbol poprzedza wartość błędu średniokwadratowego). Zakładamy dla uproszczenia, że elementarne obserwacje są niezależne (kowariancje między nimi są zerowe). f b = [b a cos( )] /c; f = a b sin( )/c ; wstawiamy do wzoru na błąd średniokwadratowy miary c: c = (f a a ) 2 + ( f b b ) 2 + (f ) 2 Wartości liczbowe: = g ; c = m; f a = ; f b = ; f = ; a =0.010; b =0.010; = 20 2 / = [rad]; c = [( ) 10-4 ] 1/2 = m 227
228 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrónania obserwacji Przykład 2: błąd średniokwadratowy średniej arytmetycznej Dane: y = f(l 1, l 2,, l n ) = ( l i ) / n ; 1 = 2 = = n = o (jednakowy błąd średni każdej obserwacji) f 1 =f 2 = =f n = 1/n (pochodne cząstkowe f / l i ) y = (1/n) (1/n) 2 2 = (1/n) 2 2 n = o / n Przykład 3: błąd średniokwadratowy odchyłki zamknięcia kątowego w ciągu zamkniętym S = α i (suma kątów pomierzonych) α S* = (n 2) 200 g (teoretyczna suma kątów) 3 1 = 2 = = n = (jednakowy błąd średni pomiaru) f = S S* (odchyłka zamknięcia kątowego) α 2 f fmax (!) (warunek poprawności, ale jakie fmax?) Szacujemy błąd średni sumy kątów pomierzonych i odchyłki f αn 2 S = 2 f = n 2 ; S = f = n ; Przyjmujemy fmax jako wielokrotność (k krotność, k =2,3) α 1 błędu średniego: fmax = k f ; (dla k=3, nierówność f fmax powinna być spełniona z prawdopodobieństwem ok , w przeciwnym razie błędy pomiarów, z tym samym prawdopodobieństwem, nie odpowiadają założonej dokładności charakteryzowanej jednakowym błędem średnim ) 228 np.: dla =80 cc, n = 25 : f = = 400 cc = 4 c ; fmax = 12 c
229 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrónania obserwacji Przykład 4: błąd średniokwadratowy odchyłki ciągu niwelacyjnego otwartego A h A1 pomierzona różnica wysokości 1 h 12 h repery wyznaczane reper o danej wysokości H A h 34 4 h 4B B S = h ij (suma pomierzonych różnic wysokości) S* = H B H A (teoretyczna różnica wysokości pomiędzy punktami A, B jako wielkość bezbłędna) f = S S* (odchyłka pomiarów) f fmax (wartość dopuszczalna - ale jaka?) Określimy błąd średni f odchyłki f : o - błąd średni odczytu na łacie. Na elementarnym przęśle pomiar dwukrotny: h = O w O p z błędem średnim h = o 2 h = O w O p z błędem średnim h = o 2 średnia h = (h +h )/2 z błędem średnim h = [(½) 2 ( o 2 ) 2 +(½) 2 ( o 2 ) 2 ] 1/2 = o Niech n = n A1 +n 12 +n 23 +n 34 +n 4B oznacza sumaryczną liczbę stanowisk niwelatora na cały ciągu, od A do B Błąd średni odchyłki f: f = n fmax = k * f (k = 3 dla P( f fmax)
230 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji ŚREDNIA WAŻONA (OGÓLNA): Dane wyniki pomiarów { x i, i=1,2,, n } o dokładnościach charakteryzowanych a priori błędami średniokwadratowymi i, i = 1,2,, n x 1 w 1 + x 2 w x n w n z = = w 1 + w w n x i w i w i w i = (1/ i ) 2 const. = waga i - tej obserwacji; const. > 0 np. const =1 Przykład: pomiar długości odcinka różnymi technikami (dokładności pomiaru określone a priori przez błędy średniokwadratowe ). Obliczona średnia ważona prawie nie różni się od pomiaru najdokładniejszego (o największej wadze) miara waga w w =w/25 d d d3 Średnia ważona: d = = d2 230
231 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrónania obserwacji Błąd średniokwadratowy średniej ważonej: Zapiszemy średnią ważoną jako funkcję liniową: z = x 1 q 1 + x 2 q x n q n = x i q i gdzie q i = w i / ( w k ) (wagi unormowane: q i = 1 ) ; w i = (1/ i ) 2 const. (waga pierwotna) Na podstawie prawa przenoszenia się błędów średniokwadratowych otrzymamy: z 2 = i 2 q i 2 = (1/w i ) q i 2 const. = = ( w i ) 1 q i const. = ( w i ) 1 q i const. = ( w i ) 1 const. z 2 = ( w i ) 1 = 1 1/ / / n 2 Dla danych z ostatniego przykładu będzie: d = ~ =
232 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrónania obserwacji Przykład wyrównania sieci niwelacyjnej z jednym punktem węzłowym (użycie średniej ważonej) A h BP B Dane są wysokości H A,H B,H C reperów nawiązania i pomierzone różnice wysokości w trzech ciągach o różnej ilości stanowisk niwelatora. Szukana jest wysokość reperu P. h AP P - Rp_rob H P = H P1 * w 1 + H P2 * w 2 + H P3 * w 3 w 1 + w 2 + w 3 h CP H P1 = H A +h AP w 1 = 1/n 1 H P2 = H B +h BP w 2 = 1/n 2 H P3 = H C +h CP w 3 = 1/n 3 n 1, n 2, n 3 - liczby stanowisk w ciągach C 1 = 0 * n 1 ; 2, 3 analogicznie 0 - założona dokładność na 1 stanowisko HP = 1 / ( 1/ / / 3 2 ) 232
233 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrónania obserwacji Wyrównanie sieci niwelacyjnej metodą najmniejszych kwadratów A 1 h A3 h A1 h h A2 h 23 h 34 h 1C h 2C h 24 C h 4C 4 h 3B h 2B h 45 h 15 reper wyznaczany reper o danej wysokości n = 5 (liczba niewiadomych wysokości reperów) m = 15 (liczba obserwacji ciągów niwelacyjnych) h ij = pomierzona różnica wysokości pomiędzy punktem i a punktem j H i = wysokość punktu i 5 B Układ równań błędów pozornych: H i H j h ij = v ij z wagą w ij dla (i,j) według planu. Wyznaczamy niewiadome z warunku najmniejszych kwadratów: w ij V ij 2 = min Po uwzględnieniu równań błędów dostajemy funkcję n zmiennych Ω( H 1, H 2,, H n ) = min Z warunków koniecznych na ekstremum otrzymujemy n tzw. równań normalnych, Ω (H 1,,H n ) / H i = 0 i=1,2,, n prowadzących do rozwiązania zadania. 233
234 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Wyrównanie sieci poziomej metodą najmniejszych kwadratów Siec pozioma - przykład A B Zasady obliczeń: Układ równań obserwacyjnych typu: f(x) - α = v z wagą w X wektor niewiadomych współrzędnych punktów wyznaczanych α miara obserwacji v - poprawka obserwacji (dodana do miary obserwacji daje miarę wyrównaną α + v będącą pewną funkcją f(x) wektora niewiadomych X ). C 1 n = 5 2=10 (liczba niewiadomych współrzędnych) m = 24 (liczba obserwacji kątowych) 2 punkt wyznaczany D punkt o znanych współrzędnych Z warunku najmniejszych kwadratów w v 2 = minimum otrzymujemy n nieliniowych równań normalnych na niewiadome współrzędne punktów wyznaczanych. Rozwiązanie numeryczne metodami iteracyjnymi (kolejnych przybliżeń) przy założeniu linearyzacji funkcji f. 234
235 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrównania obserwacji Czy średnia arytmetyczna jest zgodna z metodą najmniejszych kwadratów? Dla zbioru n jednakowo dokładnych pomiarów pewnej wielkości x* możemy napisać następujący układ równań błędów pozornych (poprawek): x l 1 = v 1 x l 2 = v 2. x l n = v n Stosujemy postulat najmniejszych kwadratów przyjmując wagi jednostkowe: v i 2 = (x l i ) 2 = Ω(x) = min. Z warunku koniecznego na ekstremum funkcji jednej zmiennej (x) (przyrównując pochodną do zera) otrzymujemy rozwiązanie w postaci średniej arytmetycznej. Ω (x) = 2 (x l i ) = 0 => n x = l i => x = ( l i ) / n Podobnie można wykazać zgodność metody najmniejszych kwadratów ze średnią ważoną. 235
236 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 9: Podstawy teorii błędów i wyrónania obserwacji Przykład zastosowania metody najmniejszych kwadratów w zadaniach specjalnych geodezji y i Wyniki pomiarów: { (x i, y i ): i=1,2,,n} Niewiadome: x o,y o, r r Dla każdego punktu pomierzonego tworzymy równanie obserwacyjne: [ (x i -x o ) 2 + (y i -y o ) 2 ] 1/2 r = v i (x o,y o ) x i i=1,2,,n Postulat: v i 2 = min prowadzi do rozwiązania. Objaśnienie: na podstawie pomierzonych współrzędnych punktów w terenie mamy odtworzyć najbardziej prawdopodobne parametry okręgu, który reprezentuje na przykład oś remontowanej trasy drogowej. 236
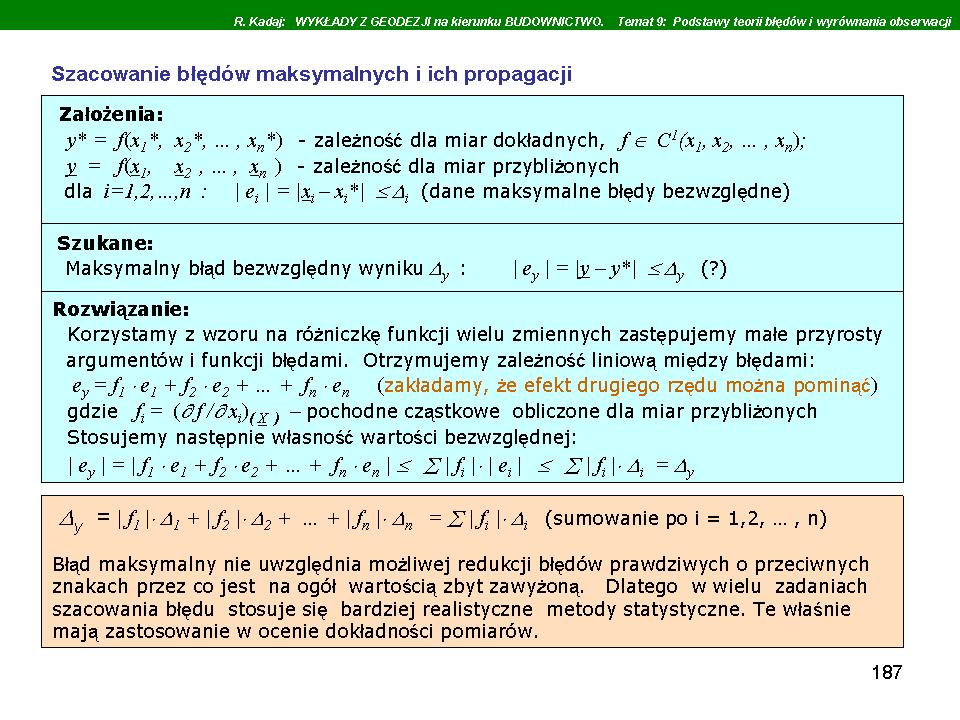
237 237
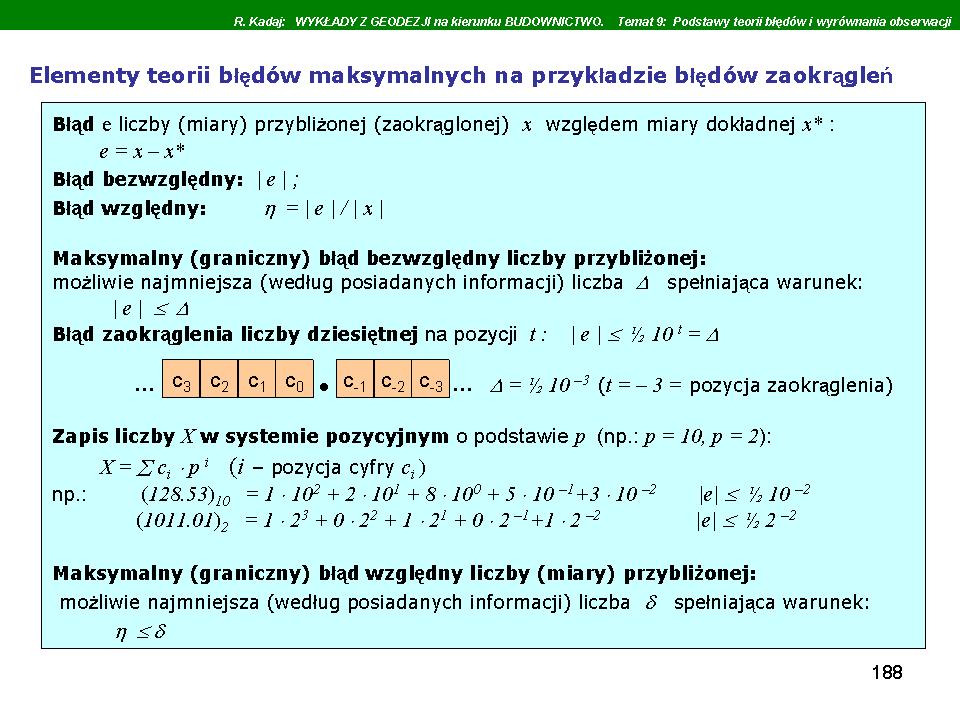
238 238
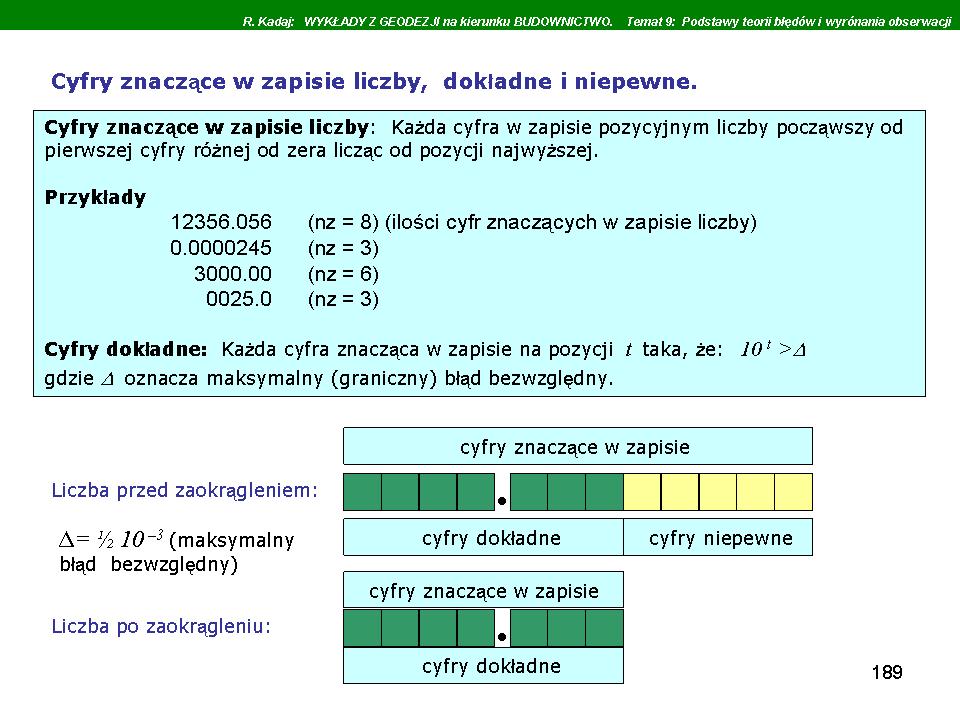
239 239
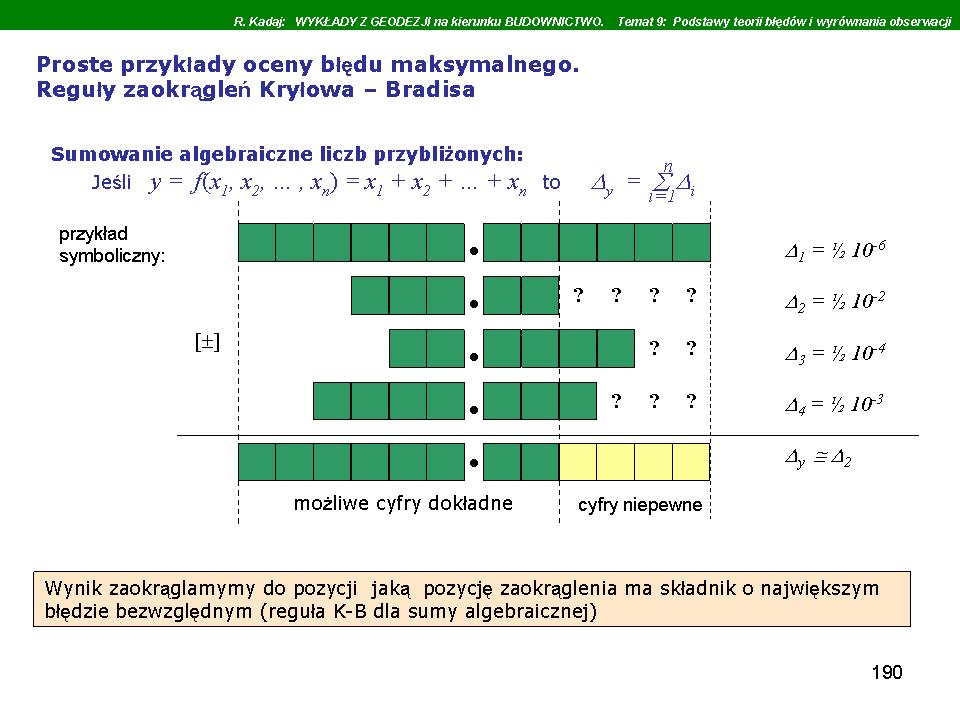
240 240
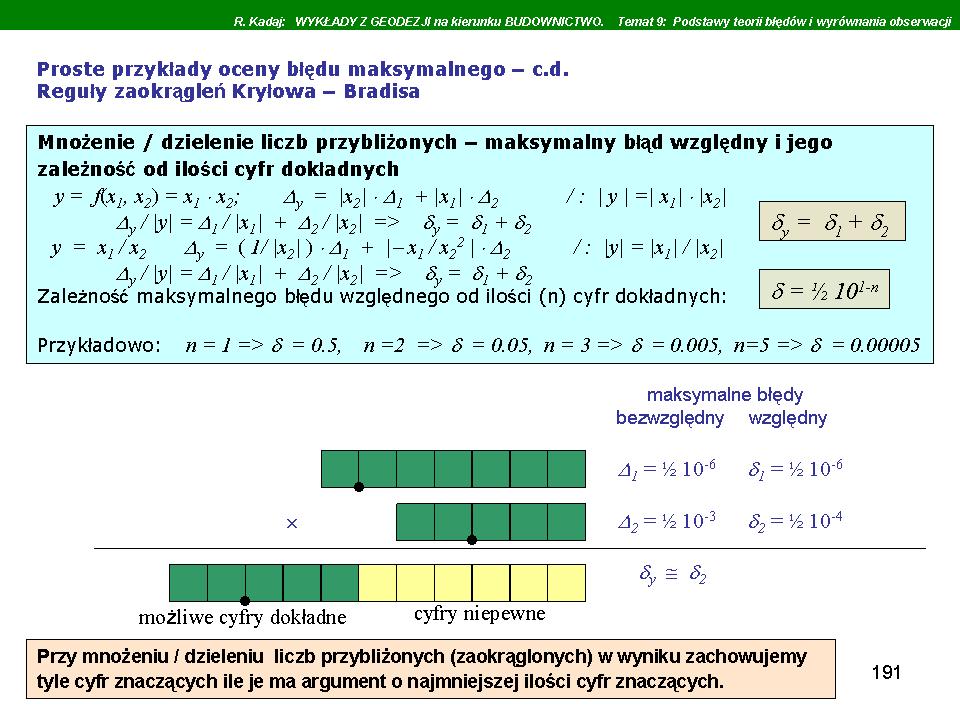
241 241
242 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych TEMAT 10: METODY POMIARÓW SYTUACYJNYCH LUB SYTUACYJNO-WYSOKOŚCIOWYCH Osnowa a pomiary sytuacyjne Rodzaje metod i technik pomiarów sytuacyjnych lub sytuacyjno-wysokościowych Zasada metody ortogonalnej (domiarów prostokątnych) przyrządy pomocnicze Przykłady dokumentów polowych Przeliczanie pomiarów ortogonalnych do układu odniesienia Metoda biegunowa, płaska i trójwymiarowa (tachimetria) Przedstawianie obiektów pomiaru i ich szczegółów na mapach znaki umowne 242
243 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych Ilustracja różnych metod pomiarów sytuacyjnych B A 5 a Metoda biegunowa WIELORZĘDOWY UKŁAD LINII POMIAROWYCH C d j k e E Metoda ortogonalna 1 f b 2 h 3 i 4 c g D Punkty osnów geodezyjnch różnych rzędów Metoda przedłużeń i przecięć 243
244 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych RODZAJE METOD POMIARÓW SYTUACYJNYCH LUB SYTUACYJNO-WYSOKOŚCIOWYCH: 1. METODA ORTOGONALNA (domiarów prostokątnych) 2. METODA BIEGUNOWA (płaska lub trójwymiarowa - tachimetria) 3. METODY WCIĘĆ (kątowe, kątowo-liniowe, liniowe) 4. METODA PRZEDŁUŻEŃ i PRZECIĘĆ 5. METODA SATELITARNA (RTK) 6. METODY FOTOGRAMETRYCZNE 7. KOMBINACJE METOD 244

245 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych POMIAR METODĄ ORTOGONALNĄ zasada pomiarów Przykłady: węgielnice pryzmatyczne Geo-fennel q. p Mierzone wielkości: p odcięta q rzędna 245
246 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych WĘGIELNICA PRYZMATYCZNA PIĘCIOKĄTNA PODWÓJNA - OPTYKA pryzmat pojedynczy bieg promienia świetlnego w pryzmacie 45 o dwa pryzmaty 90 o + =45 o 246
247 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych Zasady wykonania szkicu polowego w metodzie ortogonalnej (kolorem niebieskim podano objaśnienia) przedłużenie linii pomiarowej koniec linii pomiarowej (kontrolna miara długości podkreślona podwójnie) 16 czołówka jako miara kontrolna kontrolne przedłużenie ściany budynku z odczytem odciętej przecięcia z linią pomiarową miary odciętych zapisywane prostopadle do linii pomiarowej strzałka północy 15 na wspólnej rzędnej więcej niż 1 miara, miara końcowa raz podkreślona początek linii pomiarowej (zero jako początek odmierzania odciętych) 247
248 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych PRZELICZENIE POMIARÓW ORTOGONALNYCH DO UKŁADU ODNIESIENIA x B linia pomiarowa A, B punkty osnowy pomiarowej q i X i = k [ p i cos( ) q i sin( )] + x A y i i X i = k [ q i cos( ) + p i sin( )] + y A y A A x A p i x i y kąt obrotu obliczony ze współrzędnych punktów A, B k współczynnik zmiany skali pomiędzy układem pomiarowym a układem odniesienia, wynikający ze zniekształcenia odwzorowawczego i redukcji wysokościowej 248
249 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych METODA BIEGUNOWA (płaska lub trójwymiarowa) Na podstawie danych pomiarowych i współrzędnych punktów nawiązania (osnowy) oblicza się finalnie współrzędne x y H punktów mierzonych w układzie odniesienia mapy trygonometryczny pomiar różnicy wysokości: 249

250 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 10: Metody pomiarów sytuacyjnych lub sytuacyjno-wysokościowych PRZYKŁAD OPRACOWANIA MAPY W PROGRAMIE EWMAPA (firmy GEOBID) 250
251 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary i opracowanie rzeźby terenu, numeryczne modele terenu. TEMAT 11: POMIARY I OPRACOWANIE RZEŹBY TERENU, NUMERYCZNE MODELE TERENU Sposoby przedstawiania rzeźby terenu na mapach Niektóre elementarne formy terenowe w obrazie warstwicowym Metody pomiarów rzeźby terenu (niwelacja terenowa) Zasada interpolacji warstwic Metoda punktów rozproszonych Metoda siatki kwadratów Numeryczne modele terenu Obliczanie objętości robót ziemnych 251

252 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu RZEŹBA TERENU PRZEDSTAWIONA NA MAPIE ZA POMOCĄ WARSTWIC Fragment mapy topograficznej w skali 1: Fragment mapy zasadniczej w skali 1: 1000 Źródło: Wytyczne Techniczne G
253 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu NIEKTÓRE ELEMENTARNE FORMY TERENOWE W OBRAZIE WARSTWICOWYM siodło dolina oznaczenie kierunku spadku góra taras
254 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu NIEKTÓRE ELEMENTARNE FORMY TERENOWE W OBRAZIE WARSTWICOWYM c.d. linie szkieletowe linia ściekowa skarpa linia grzbietowa 254
 pomiarów")
255 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu Przykład rozmieszczenia punktów (pikiet) pomiarów wysokościowych Źródło: GUGIK, Wytyczne Techniczne G
256 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary i opracowanie rzeźby terenu, numeryczne modele terenu. METODY POMIARÓW RZEŹBY TERENU (NIWELACJA TERENOWA) 1. METODA PUNKTÓW ROZPROSZONYCH (biegunowa) 2. METODA SIATKI KWADRATÓW (siatkowa) 3. METODA PRZEKROJÓW PODŁUŻNYCH I POPRZECZNYCH 4. METODY FOTOGRAMETRYCZNE 5. METODA SATELITARNA RTK 256
257 NIWELACJA TERENU - METODY BIEGUNIOWE I METODA SIATKOWA Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu Metoda punktów rozproszonych (niwelatorem z kołem poziomym i dalmierzem optycznym) lub tachimetria (tachimetrem). Metoda siatkowa z wykorzystaniem niwelacji geometrycznej. Punkty pomiarowe są węzłami siatki wytyczonej w terenie w nawiązaniu do osnowy punkty reprezentujące powierzchnię topograficzną stanowiska pomiarowe w punktach osnowy geodezyjnej stanowiska niwelatora nawiązane tylko wysokościowo do osnowy. obszar stanowiska 257
258 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu INTERPOLACJA WARSWIC NA PODSTAWIE SIATKI TRÓJKĄTÓW UTWORZONYCH Z PIKIET POMIAROWYCH
259 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu ZASADA INTERPOLACJI WARTSWIC d d d d 0.7d

260 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu SZABLON DO INTERPOLACJI punkty interpolowane rysunek mapy kalka z liniami równoległymi, układana tak, by punkty interpolowane zachowały odpowiednie proporcje odległości 260

261 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary rzeźby terenu PRZYKŁAD NIWELACJI SIATKOWEJ DLA WYRÓWNANIA PŁYTY BOISKA SPORTOWEGO 261
262 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary i opracowanie rzeźby terenu, numeryczne modele terenu. Numeryczny model terenu (NMT) i jego zastosowania (DTM - Digital Terrain Model) Formy zapisu powierzchni topograficznej w technice komputerowej: Pierwotny zbiór punktów rozproszonych powierzchni topograficznej { (x i, y i, H i ): i = 1, 2,, n } pochodzący z pomiarów, zapisany w bazie mapy Formy przetworzone przez programy komputerowe: a) Siatka trójkątów aproksymująca powierzchnię topograficzną według oryginalnych punktów pomiarowych b) Siatka kwadratów wyinterpolowana na podstawie punktów rozproszonych c) Zbiór punktów warstwic, łączonych automatycznie za pomocą sklejanych krzywych wielomianowych 3-go stopnia a) b) c) 262
263 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary i opracowanie rzeźby terenu, numeryczne modele terenu. Interpolacja siatki kwadratów i r i węzeł interpolowany - promień koła obszaru interpolacji H = ( w i * H i ) / ( w i ) w i = (1/r i ) q np.: q = 2 263
264 Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 11: Pomiary i opracowanie rzeźby terenu, numeryczne modele terenu. Obliczanie objętości mas (zastosowanie NMT) Metody oparte na NMT: 1. Metody oparte na siatce trójkątów 2. Metody oparte na interpolowanej siatce kwadratów 3. Inne metody (warstwicowe, średniej wysokości, aproksymacji powierzchni topograficznej) Ogólne zasady obliczeń: Istota metod polega na sumowaniu objętości elementarnych graniastosłupów o podstawach trójkątów lub kwadratów: V = P i * H si gdzie: P i - pole podstawy bryły elementarnej, H si średnia wysokość krawędzi Wysokości krawędzi mogą być liczone względem umownej płaszczyzny (powierzchni odniesienia) lub względem pierwotnej powierzchni topograficznej (np. przed wykonaniem sztucznego nasypu lub zwałowiska materiałów) H i1 H i2 H i3 V = V i P i V i = P i * H si ; H si = (H i1 + H i2 + H i3 ) / 3 i wskaźnik bryły elementarnej 264
265 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów TEMAT 12: METODY WYZNACZANIA (POMIARÓW) PÓL POWIERZCHNI OBSZARÓW Sposoby wyznaczania pól powierzchni obszarów Metody analityczne Metody graficzne i rastrowe Metoda mechaniczna (z użyciem planimetru) Zniekształcenia pól powierzchni na mapach 265
266 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów Sposoby wyznaczania pól powierzchni obszarów 1. Analityczne, w oparciu o dane współrzędne wierzchołków wieloboku, którego pole wyznaczamy 2. Graficzne, w oparciu o pomierzone na mapie miary elementów geometrycznych definiujące obszar, w szczególności rastrowe, na podstawie liczby pikseli definiujących obszar 3. Mechaniczne, z użyciem planimetrów przyrządów do pomiaru pól powierzchni obszarów na mapach 266
267 x 2 y 1 y 2 2 1(n+1) y x 1 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów x 2 x 3 P Metody analityczne: pole powierzchni wieloboku określonego współrzędnymi x, y wierzchołków 4 Przypisujemy kolejnym wierzchołkom wielokąta liczby naturalne od 1 do n. Wierzchołek 1 oznaczamy dodatkowo n+1, podobnie wierzchołek n liczbą 0. Rzutując wierzchołki wielokąta na oś x otrzymamy trapezy, którego podstawami są współrzędne y, a wysokościami różnice współrzędnych x dla kolejnych par wierzchołków wielokąta. Z odpowiednio dobranych sum i różnić pól trapezów otrzymuje się pole wielokąta. n y n x n n(0) 1 2 n 3 4 y Przykładowo, dla n=5 będzie: P = 0.5 * [ (y 1 +y 2 ) (x 2 x 1 ) (y 2 +y 3 ) (x 3 x 2 ) + (y 3 +y 4 ) (x 3 x 4 ) + (y 4 +y 5 ) (x 4 x 5 ) (y 5 +y 1 ) (x 1 x 5 )] Wzory alternatywne: P = y i (x i+1 x i-1 ) /2 P = x i (y i+1 y i-1 ) /2 Sumowanie po i=1,2,, n Po przekształceniach otrzymamy zgodność z pierwszym wzorem podanym obok. Rzutując analogicznie wierzchołki wielokąta na oś y tworzymy trapezy, których odpowiednia kombinacja sum i różnic pól prowadzi do drugiego z podanych wzorów. 267
268 x O 2 d d (n+1) P = d i d i+1 sin ( i+1 i ) / 2 Sumowanie po i=1, 2,, n d 3 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów 3 n P y 4 Metody analityczne: pole powierzchni wieloboku określonego współrzędnymi biegunowymi (, d) wierzchołków, d odległość punktu od bieguna (początku układu), kąt kierunkowy. Przyporządkowujemy kolejnym wierzchołkom wielokąta liczby naturalne od 1 do n. Wierzchołek 1 oznaczamy dodatkowo n+1. Jeśli w pojedynczym trójkącie dane są długości a, b dwóch boków i miara kąta między nimi zawartego, to pole trójkąta równa się ( ½ ) a b sin( ). Rozważamy trójkąty (O, i, i+1), utworzone przez kolejne pary wierzchołków wielokąta i początek układu. Pole wielokąta tworzy się z odpowiedniej kombinacji sum i różnic pól trójkątów. W pojedynczym trójkącie, stosownie do podanego wyżej wzoru, odpowiednikiem boków a, b są długości d i, d i+1 natomiast odpowiednikiem kąta jest moduł różnicy kątów kierunkowych i+1 i, przy czym jeśli znak różnicy jest + pole trójkąta dodaje się a gdy znak różnicy jest - pole to odejmuje się, zgodnie ze znakiem wartości sin( i+1 i ). 268
269 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów Metody graficzne: na podstawie figur elementarnych b a P = a b b h c P =a h/2 Wzór Herona: P =[ (s-a) (s-b) (s-c)] 1/2 s = (a+b+c)/2 h Trapez P =(a+b) h/2 b a a P 1 + P P 3 P 4 + P = P 1 +P 2 +P 3 +P 4 + [+] - [-] 269
270 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów Ćwiczenie Obliczenie pola powierzchni wieloboku Metoda Gaussa ID (i) x y y i+1 y i-1 x i+1 x i-1 0(4) (1) Wzory alternatywne: P = 0.5 y i (x i+1 x i-1 ) = ha 47a 36m 2 P = 0.5 x i (y i+1 y i-1 ) = Metoda podziału na trójkąty Obliczamy długości boków ze współrzędnych i stosujemy wzór Herona Jednostki miary pola powierzchni 1m 2 1 a (ar) = 100 m 2 1 ha (hektar) = 100 a 1-2(a) = s a = (b) = s b = P 1 = (c) = s c = s = (a+b+c)/2 = (a) = s a = (b) = s b = P 2 = (c) = s c = s = (a+b+c)/2 = P = P 1 + P 2 =
271 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów Metody graficzne: Przykład wyznaczenia pól metodą graficzną w bilansowaniu objętości robót ziemnych Pola przekrojów: (-) przekrój w wykopie (-) -h- w i Przekrój projektowanej drogi (+) przekrój w nasypie (+) (-) Przekrój terenu (powierzchni topograficznej) P = (h/2) ( w 1 + w n + 2 w i ) = h w i ; = (h/2) (w 1 + w n ) 2 < i < n-1 1 < i < n (przy wyrównaniu profilu projektowanego do powierzchni terenu będzie w 1 = w n = 0 i = 0) Objętości mas: V = V i = (P i + P i+1 ) d i,i+1 / 2 (sumy po i = 1,2,, r -1) d i,i+1 P i+1 P 1 P i P r 271
272 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów Metoda rastrowa jako szczególna metoda graficzna P = n P o P o = a 2 = pole elementarne odpowiadające jednemu pikselowi. Kształt figury zgeneralizowany do pełnych pikseli Uwaga: pole powierzchni obszaru na płaszczyźnie odwzorowania podlega odredukowaniu na elipsoidę odniesienia, czyli skorygowaniu z tytułu zniekształcenia odwzorowawczego pola. 272
273 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów Metoda mechaniczna: zasada planimetru biegunowego (Amslera) wodzik umowny punkt początkowy i końcowy obwodzenia konturu Ramię wodzikowe wózek z kółkiem całkującym. przegub r P r 1 Kółko całkujące z licznikiem obrotów n = n k n p = krotność 1/1000 obrotu n p = odczyt początkowy licznika n k = odczyt końcowy licznika (po obwiedzeniu konturu) Odczyt wskaźnikowy na skali lub na wyświetlaczu cyfrowym R ramię biegunowe (o stałej długości) biegun P = c 1 * n lub P = c 1 * n + c 2 (gdy biegun wewnątrz obszaru) c 1, c 2 stałe zależne od r; n liczba pełnych obrotów kółka całkującego. Stałą c 1 można wyznaczyć obwodząc kontur obszaru o znanym polu, Stała c 2 jest określona wzorem c 2 = ( R 2 + r r r 1 ) (pole koła obojętnego, czyli takiego jakie zatacza wodzik, gdy kółko całkujące nie obraca się) 273

274 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów Wyznaczenie stałych planimetru 1 = R 2 r = R 2 + r r r 1 Empiryczne wyznaczenie stałej C 2 (biegun położony wewnątrz obszaru): C 2 = P C 1 n P = znane pole powierzchni obszaru n = ilość obrotów kółka całkującego 274
275 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 12: Wyznaczanie pól powierzchni obszarów Zniekształcenie pola obszaru na mapie, odredukowanie pola na elipsoidę odniesienia Pola powierzchni figur wyznaczone w układzie odwzorowawczym mapy powinny być odredukowane do odpowiadających pól obszarów na elipsoidzie odniesienia. Zniekształcenie pola elementarnego: d na mapie d na elipsoidzie (ilustracja dla > 0 ale może być odwrotnie) Pole elementarne p = d 2, p = (d ) 2 = d 2 2 d + 2 p 2 d = p 2 d 2 / d = p 2 p =p dp / d = - elementarne zniekształcenie długości dp = 2 p Pole całego obszaru P = n p (pole na płaszczyźnie odwzorowawczej), n ilość pól elementarnych P = P P = P dp = = P 2 p = P 2 p n ( ) / n = P 2 P śr (pole na elipsoidzie); śr = ( ) / n (średnia wartość w obszarze) P = 2 P śr Przykład P = 1 ha 25a 36m 2 = m 2 śr = 7.7 cm / km = P = 2 P śr = ( ) = = 1.9 m 2 2 m 2 P = P P = ( 2 ) = m 2 275
276 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne TEMAT 13: POMIARY REALIZACYJNE Podstawowe procesy produkcyjne w geodezji Zakres prac projektowych, budowlanych i geodezyjnych w procesie realizacyjnym inwestycji Geodezyjne osnowy realizacyjne Klasyfikacja niezależnych osnów realizacyjnych Objaśnienie funkcji wielorzędowych osnów realizacyjnych Ławica budowlana Elementy regularnych osnów realizacyjnych Metoda swobodnego stanowiska Metody tyczenia sytuacyjnego i wysokościowego Przykład osnowy realizacyjnej dla trasy komunikacyjnej Tyczenie elementów osiowych tras w łukach kołowych Przykładowe elementy projektu osi trasy na przekroju podłużnym i poprzecznym 276
277 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne PODSTAWOWE PROCESY PRODUKCYJNE W GEODEZJI PROCES INWENTARYZACYJNY TEREN, OBIEKTY Założenie osnowy, pomiary syt-wys., obliczenia (przetwarzanie danych), opracowanie kartometryczne i graficzne MAPA PROJEKT NA MAPIE PROCES REALIZACYJNY Założenie osnowy realizacyjnej, geodezyjne opracowanie planu generalnego projektu inwestycji, obliczenia miar realizacyjnych, opracowanie szkiców, tyczenie elementów osiowych, pomiary kontrolne, inwentaryzacja powykonawcza OBIEKTY ZREALIZOWANE 277
278 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne ZAKRES PRAC PROJEKTOWYCH I INŻYNIERYJNO - BUDOWLANYCH ZAKRES PRAC GEODEZYJNYCH A. Opracowanie projektu wstępnego (ogólnego) 1. Pomiar sytuacyjno wysokościowy wydzielonego obszaru (pasa terenu), opracowanie mapy sytuacyjno-wysokościowej dla celów projektu szczegółowego (skala 1: 500 lub 1:1000) (w szczególnosci opracowanie przekroju podłużnego i przekrojów poprzecznych względem projektowanej osi trasy) B. Opracowanie projektu szczegółowego 2. Założenie trójwymiarowej osnowy realizacyjnej o parametrach jakościowych zależnych od klasy realizowanego obiektu 3. Geodezyjne opracowanie planu generalnego projektu inwestycji - weryfikacja analitycznej zgodności wewnętrznej miar definiujących wzajemne położenie osiowych elementów geometrycznych; określenie (obliczenie) miar kontrolnych 4. Obliczenie współrzędnych i wysokości punktów osiowych projektowanej inwestycji w układzie osnowy realizacyjnej; przygotowanie baz danych numerycznych i elementów graficznych (szkiców realizacyjnych) 5. Wytyczenie wskaźników dla profilowania robót ziemnych C. Roboty ziemne, zabezpieczenia wykopów, wykonanie ławic budowlanych 6. Wytyczanie wskaźników osiowych obiektów projektowanej inwestycji z kontrolą przed i w czasie wykonywania prac budowlano-montażowych D. Prace budowlano montażowe wg wyznaczonych wskaźników osiowych 7. Pomiary inwentaryzacyjno- kontrolne 278
 Wykaz współrzędnych punktów w")
279 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne Przykładowy fragment mapy projektowej (obiekty projektowane reprezentowane przez punkty o określonych współrzędnych w układzie mapy) Wykaz współrzędnych punktów w układzie mapy E E E KD KD KD KS KS KS RC RC RC S S T T Źródło: J. Gajdek: Opracowanie numeryczne obiektów budowlanych na bazie map Rastrowych. II Konf. N-T. Solina
280 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne GEODEZYJNE OSNOWY REALIZACYJNE 1. Jako dostępne lub uzupełnione (zagęszczone) osnowy państwowe, sytuacyjno wysokościowe [ stosowane m.in. dla celów realizacji projektów podziałów gruntowych, prac scaleniowych; projektów melioracji gruntów; projektów inwestycji sieciowych, wodociągowych, kanalizacyjnych, elektroenergetycznych, telekomunikacyjnych; projektów niewielkich odosobnionych obiektów, jak np. budynków mieszkalnych lub gospodarczych ] 2. Jako niezależne osnowy geodezyjne, sytuacyjno wysokościowe, o podwyższonej dokładności, wyznaczane w lokalnych układach współrzędnych, zdefiniowanych specjalnie dla danej inwestycji. [ Nawiązanie niezależnych osnów realizacyjnych do państwowego układu współrzędnych dokonuje się przez liniową transformację konforemną w oparciu o punkty dostosowania (punkty posiadające współrzędne w obu układach) ] 280
281 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne KLASYFIKACJA NIEZALEŻNYCH OSNOWÓW REALIZACYJNYCH PODZIAŁ OSNÓW REALIZACYJNYCH NA RZĘDY: 1. Podstawowe 2. Szczegółowe 3. Montażowe W przeciwieństwie do osnów państwowych, wielorzędowe osnowy realizacyjne nie są obliczane według zasady od ogółu do szczegółu t.j. przy założeniu niezmienności (stałości) punktów osnowy wyższego rzędu. Osnowa szczegółowa lub montażowa jest obliczana niezależnie, a jej wpasowanie do układu osnowy rzędu wyższego następuje na drodze liniowego przekształcenia konforemnego (transformacją Helmerta), podobnie jak wpasowanie osnowy podstawowej (realizacyjnej) do układu osnowy państwowej. PODZIAŁ OSNÓW REALIZACYJNYCH ZE WZGLĘDU NA GEOMETRIĘ SIECI: 1. O kształtach swobodnie dostosowanych do sytuacji terenowej [ triangulacyjne, poligonowe, poligono-triangulacyjne, oporowe, wektorowe GNSS ] 2. Regularne (siatki prostokątów) 281
282 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne OBJAŚNIENIE FUNKCJI WIELORZĘDOWYCH OSNÓW REALIZACYJNYCH Ławica budowlana Osnowa podstawowa Osnowa szczegółowa (regularna) Osnowa montażowa (regularna) 282
283 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne Ławica budowlana oznaczony przebieg osi obiektu 1 2 deska pozioma pal drewniany Głowica znaku osnowy regularnej ustalony finalnie punkt siatki regularnej x wektor korekty trasowania (dx,dy) y punkt początkowy (przybliżony) Etapy pomiarowe: - stabilizacja znaków - pomiar, wyrównanie, obliczenie - wprowadzenie poprawek trasowania dla figur regularnych 283
284 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne Metoda swobodnego stanowiska (połączenie wcięcia wstecz z metodą biegunową) Budowla istniejąca Punkt oporowy jako element osnowy realizacyjnej jednorzędowej obiekt realizowany Wyznaczenie pozycji instrumentu (TOTAL-STATION) metodą wcięcia wstecz z elementami kontrolnymi Obszar inwestycyjny 284
285 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne METODY TYCZENIA SYTUACYJNEGO I WYSOKOŚCIOWEGO Metoda ortogonalna Metoda przedłużeń i przecięć Metody wcięć geodezyjnych Metody biegunowe (płaska, przestrzenna) Metoda swobodnego stanowiska (połączenie wcięcia wstecz z metodą biegunową) GPS/RTK (satelitarne wyznaczanie pozycji w czasie rzeczywistym) Niwelacja geometryczna lub trygonometryczna 285
286 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne PRZYKŁAD OSNOWY REALIZACYJNEJ DLA PROJEKTOWANEJ TRASY KOMUNIKACYJNEJ OŚ TRASY SKŁADA SIĘ TU Z ODCINKÓW PROSTYCH I ŁUKÓW KOŁOWYCH W 1 x X P 1 K 1 Osnowa szczegółowa dla proj. mostu R 1 R 1 B A y Punkt osnowy realizacyjnej (podstawowej) Y 286
287 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne PRZYKŁAD OSI TRASY ZŁOŻONEJ Z ODCINKÓW PROSTYCH, ŁUKÓW KOŁOWYCH I TZW. KRZYWYCH PRZEJŚCIOWYCH Łuki kołowe B A Odcinki prostych krzywe przejściowe Komentarz: ponieważ bezpośrednie przejście z odcinka prostej w łuk kołowy powoduje skokową zmianę krzywizny z wartości 0 (na prostej) do 1/R na łuku więc dla złagodzenia skutku tej zmiany na siłę odśrodkową pojazdu (jest proporcjonalna do krzywizny łuku), pomiędzy odcinkiem prostej a łukiem kołowym projektuje się tzw. krzywe przejściowe o krzywiźnie zmieniającej się jednostajnie od 0 do 1/R. Dla tras drogowych jako krzywe przejściowe stosuje się klotoidy (zob. dalej) 287
288 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne UKŁAD GEOMETRYCZNY: PROSTA KRZYWA PRZEJŚCIOWA ŁUK KOŁOWY x P 1 W 1 l (l) R K 1 Klotoida jako krzywa przejściowa Równanie ogólne: l ( l ) = const. = a 2 P O l długość łuku klotoidy, l 0, L ( l ) promień krzywizny, (l) (, R R promień łuku kołowego a parametr klotoidy k (l) = 1/ (l ) krzywizna, k(l) 0, 1/R odcinek łuku klotoidy łuk kołowy y odcinek prostej 288
289 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne ELEMENTY GEOMETRYCZNE ŁUKU KOŁOWEGO x A P T R /2 O W w S f /4 c/2 E /4 F K DANE: współrzędne punktów A(x A, y A ), B(x B, y B ), W(x W, y W ), i promień okręgu R Szukane: Współrzędne punktów P, K Algorytm (miary kątowe w gradach): 1 o Obliczamy kąt i =200 g 2 o Długość odcinka stycznej T = PW = KW = R tg( /2) 3 o Współrzędne punktów P, K jako punktów na prostych, odpowiednio: WA i WB y B Inne związki geometryczne: c = PK = 2 R sin( /2) (cięciwa) ; PE = EK = FK = c/2; f = SE = SF = R R cos( /2) = R [1 cos( /2)] = 2 R sin 2 ( /4) (strzałka łuku); w = WO R = R/cos( /2) R = R [1/cos( /2) 1], długość łuku: ł = R [rad] 289
290 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne PRZYPADEK, GDY WIERZCHOŁEK ŁUKU JEST NIEDOSTĘPNY x W DANE: współrzędne punktów A(x A, y A ), B(x B, y B ), W 1 (x W1, y W1 ), W 2 (x W2, y W2 ), i promień okręgu R A P W 2 W 1 S f c/2 E /4 R /2 Inne związki geometryczne: c = PK = 2 R sin( /2) (cięciwa) ; PE = EK = = c/2; f = SE = R R cos( /2) = R [1 cos( /2)] = =2 R sin 2 ( /4) (strzałka łuku); O y K B Szukane: Współrzędne punktów P, K, S Algorytm (miary kątowe w gradach): 1 o Obliczamy kąt z różnicy kątów kierunkowych prostych W 1 A i W 2 B oraz =200 g 2 o Długość W 1 W 2 oraz miary kątów, ze współrzędnych punktów danych 3 o Odcinki W W 1 i W W 2 z rozwiązania trójkąta W-W 1 -W 2. 4 o Długości odcinków stycznych PW 1 = R tg( /2) W W 1 KW 2 = R tg( /2) W W 2 5 o Współrzędne punktów P, K jako punktów na prostych, odpowiednio: W 1 A i W 2 B. Współrzędne punktu S jak w zadaniu 1 lub jako punktu na domiarze prostokątnym (c/2, -f) względem bazy PK 290
291 R. Kadaj: WYKŁADY Z GEODEZJI na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne x ŁUK KOSZOWY A p r 1 B s 1 O 1 KONTROLA = 180 o ; = kąt między prostymi KC i PA czyli różnica kątów kierunkowych: = PA KC Kąty kierunkowe liczymy ze współrzędnych odpowiednich punktów P y O C S r2 W q s 2 K DANE: współrzędne punktów A(x A, y A ), B(x B, y B ) długości odcinków p, q promienie okręgów r 1, r 2 długości łuków okręgów s 1, s 2 Szukane: Współrzędne punktów P, K, S, C Algorytm (obliczamy kolejne wielkości): 1 o Współrzędne P jak punktu na prostej AB o odciętej p 2 o Współrzędne O 1 jak punktu na domiarze prostokątnym (p, r 1 ) 3 o Miary kątów 1 = s 1 /r 1 [rad]; 2 = s 2 /r 2 [rad] 4 o Współrzędne punktów O 2 i S metodą biegunową biorąc orientację kątową 1 względem bazy Q 1 P i odpowiednie odległości: O 1 O 2 = r 1 r 2, O 1 S =r 1 ; 5 o Współrzędne punktu K metodą biegunową, biorąc orientację kątową względem 2 bazy O 2 S i odległość O 2 K =r 2. 6 o Współrzędne punktu C jako punktu na domiarze prostokątnym (r 2,q) 291
292 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne TYCZENIE PUNKTÓW POŚREDNICH ŁUKU KOŁOWEGO WZGLĘDEM STYCZNEJ METODA ORTOGONALNA DLA RÓWNYCH ODCINKÓW STYCZNEJ X Dla danych: R, d (R promień łuku, d długość elementarnego odcinka stycznej) obliczamy współrzędne lokalne (względem stycznej) punktów pośrednich: x i = i d y i = R (R 2 x i 2 ) 1/2 x i 2 / (2R) i wskaźnik punktu (i = 0,1,2, ) Y 292
293 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne TYCZENIE PUNKTÓW POŚREDNICH ŁUKU KOŁOWEGO WZGLĘDEM STYCZNEJ METODA ORTOGONALNA DLA RÓWNYCH ODCINKÓW ŁUKU X x s i Dla danych: R, s (R- promień łuku, s długość elementarnego odcinka łuku) obliczamy współrzędne lokalne (względem stycznej) punktów pośrednich: x i = R sin (i ) y i = R [1 cos (i )] 1 2 i wskaźnik punktu pośredniego łuku ( i = 0,1,2, ), [rad] = s / R = kąt środkowy dla odcinka łuku s R y Y 293
294 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne OKREŚLENIE POŁOŻENIA PUNKTU HEKTOMETROWEGO NA ŁUKU we współrzędnych lokalnych x,y i w układzie osnowy realizacyjnej x X 5/1 d P x s R y α 5/2 R y s = 100 d; α = s / R x = R sin(α); y = R [1 cos(α)] Transformacja konforemna z układu lokalnego (x,y) stycznej do układu osnowy realizacyjnej: X=f 1 (x,y); Y=f 2 (x,y) 5-ty kilometr i 1-szy hektometr (5100 m) od początku trasy Układ osnowy realizacyjnej lub układ państwowy Y 294
295 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne PRZEKRÓJ PODŁUŻNY TRASY DROGOWEJ SKALA 1: 100/1000 Projektowana niweleta Przekrój terenu na osi trasy pp 210 m użytki Nieużytki Rola H niwelety H terenu profil pionowy profil poziomy 18.6 % R = 9000 m odcinek prostej L = 645 m odległości hektometry 0/0 0/1 0/2 0/3 295
296 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 13: Pomiary realizacyjne PRZEKRÓJ POPRZECZNY OSI TRASY przekrój terenu przekrój terenu i powierzchni projekt. Odległość przekroju od najbliższego hektometru 2/5 2/ / profil projektowany + nasypy + + N + + wykopy W P.p teren Rzędne H Bilansowanie robót ziemnych: Długości [m] Pole powierzchni P i = N i W i N nasypy, W wykopy Objętość robót V = 0.5 (P i + P i+1 ) d i,i+1 d i,i+1 odległości pomiędzy sąsiednimi przekrojami 296
297 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 14: Pomiary przemieszczeń i odkształceń obiektów TEMAT 14: GEODEZYJNE POMIARY PRZEMIESZCZEŃ I ODKSZTAŁCEŃ OBIEKTÓW Geodezyjne pomiary przemieszczeń pojęcia podstawowe Matematyczne modele geodezyjnych pomiarów przemieszczeń i odkształceń Pomiary kontrolne budowli specjalnych 297
298 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 14: Pomiary przemieszczeń i odkształceń obiektów Geodezyjne pomiary przemieszczeń obiektów pojęcia podstawowe punkt kontrolny (ruchomy) obiekt badań obiekt odniesienia punkt odniesienia (stały) sieć obserwacyjna (kontrolna) 298
299 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 14: Pomiary przemieszczeń i odkształceń obiektów Matematyczne modele geodezyjnych pomiarów przemieszczeń i deformacji obiektów: Modele stacjonarne [ Jednokrotny pomiar mający określić odchylenia geometrii obiektu od projektu. Odchylenia te mogą być wynikiem trwałych przemieszczeń i odkształceń (jak np. wychylenie osi komina od pionu) lub błędów wykonania. W tym ostatnim przypadku pomiar jest po prostu elementem geodezyjnej inwentaryzacji powykonawczej obiektu ] Modele quasi stacjonarne (lub quasi-kinematyczne) [ Okresowy (epokowy) pomiar stanu geometrycznego (przemieszczeń i odkształceń) obiektu względem umownego stanu pierwotnego. Analizy przemieszczeń i odkształceń obiektu w czasie dokonuje się na podstawie różnic stanów epokowych]. Modele kinematyczne [ Model kinematyczny opisuje deformacje obiektu w funkcji czasu. Parametry modelu kinematycznego obiektu aproksymuje się na podstawie zbiorów obserwacji rozłożonych w czasie] Modele dynamiczne [ Model dynamiczny opisuje deformacje obiektu w funkcji działających sił (naprężeń, obciążeń). Parametry modelu aproksymuje się na podstawie zbiorów obserwacji rozłożonych w przestrzeni obiektu o zmiennych obciążeniach ] 299
300 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 14: Pomiary przemieszczeń i odkształceń obiektów Pomiary kontrolne budowli specjalnych (przykład dla modelu stacjonarnego) Przykład budowli wysmukłej o kształcie jednopowłokowej hiperboloidy obrotowej Zakres i cele badań: Badanie pionowości i prostoliniowości osi budowli wysmukłych (kominów, chłodni hiperboloidalnych, budowli wieżowych) Wyznaczenie odchyleń kształtu obiektów od stanów nominalnych (projektowych) odchylenia od prostoliniowości z szacowaną granicą błędu pomiaru na poziomie ufności 95% Stan nominalny (oś pionowa) Stan rzeczywisty - odchylenie osi od pionu o kąt. sieć obserwacyjna punkt odniesienia (x,y,h) pomiar metodą otaczających stycznych wektor wychylenia w poziomie 300
301 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 14: Pomiary przemieszczeń i odkształceń obiektów Pomiar strzałki zwisu liny w środku przęsła Strzałka zwisu ma związek z poziomą siłą naciągu liny. Problem dotyczy szczególnych obiektów inżynierskich, jak np.: przewody wysokich napięć, liny nośne kolei linowych, liny odciągowe masztów. Zwisająca swobodnie lina ma kształt krzywej łańcuchowej (zbliżonej do paraboli). Krzywa leży w płaszczyźnie pionowej określonej przez punkty zaczepienia liny (A, B). Pomierzone punkty dodatkowe 1, 2, 3, wraz z punktami zaczepienia A, B, pozwalają aproksymować równanie krzywej. Na podstawie równania krzywej i równania cięciwy AB określa się długość strzałki zwisu (f) B A 1 2 f 3 z Lokalny układ współrzędnych A x d/2 B teodolit y Rysunek objaśnia sposób wyznaczenia punktów 1,2,3, jako punktów przebicia się prostych celowych z płaszczyzną pionową C 301
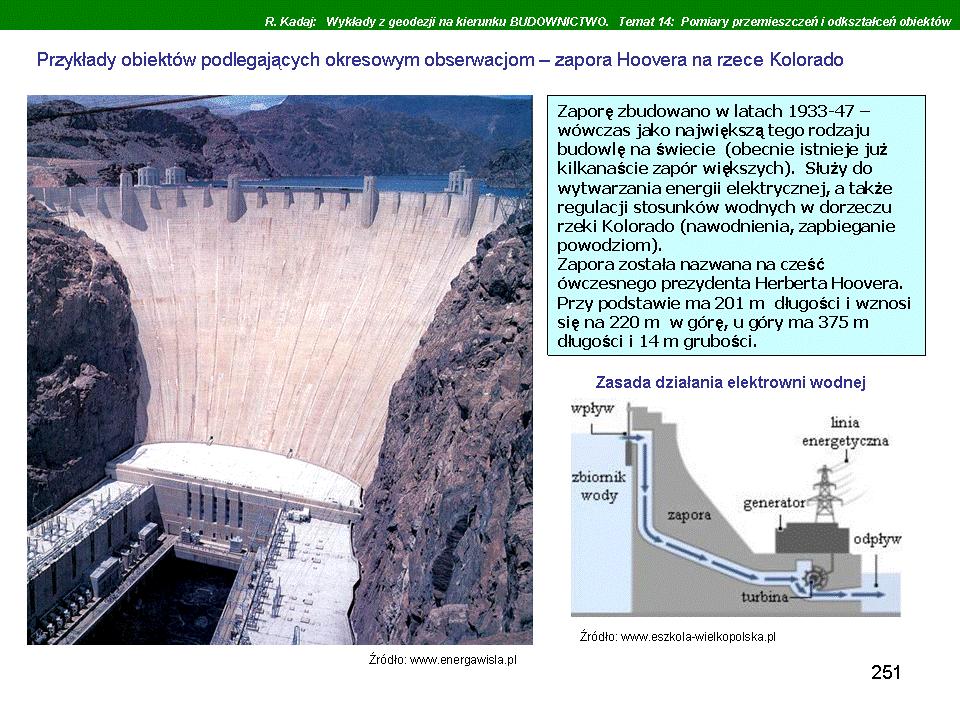
302 302

303 Źródło: maps.google.pl 303
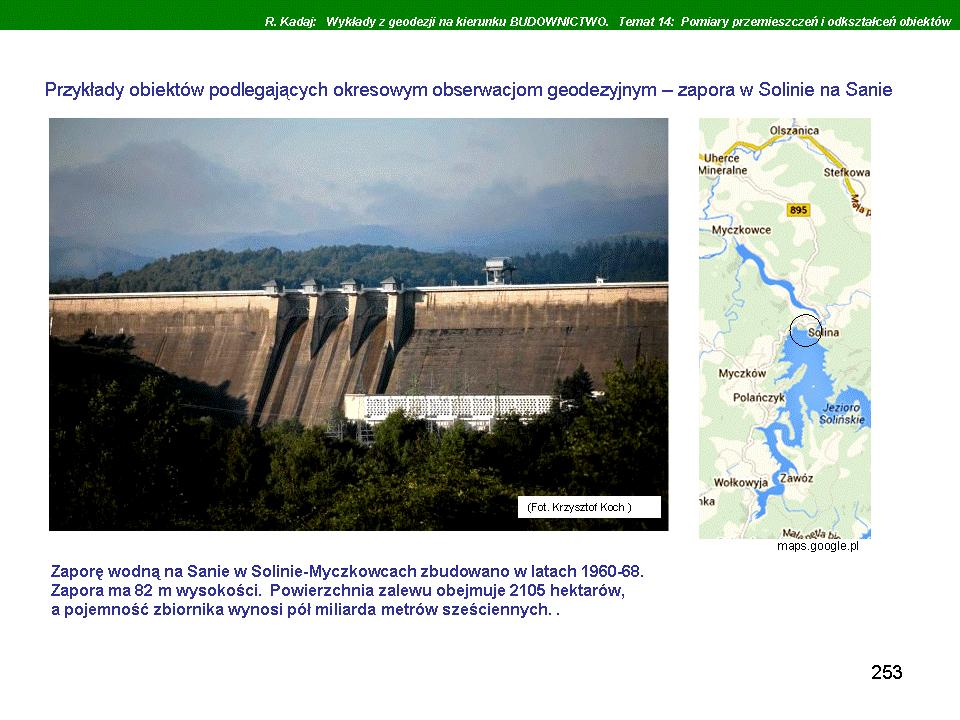
304 304

305 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 14: Pomiary przemieszczeń i odkształceń obiektów Przykład geodezyjnej sieci kontrolnej do badania przemieszczeń poziomych zapory wodnej (okresowe pomiary kątowe, których różnice wyznaczają wektory przemieszczeń punktów obiektu) korona zapory odpływ zbiornik Oznaczenia: - punkty obiektu (punkty kontrolowane, obserwowane) - stanowiska obserwacyjne (pomiarów kątowych) - punkty odniesienia (punkty kontrolne) Punkty odniesienia wyznacza się pierwotnie w układzie lokalnym, w sieci pomiarów kątowo - liniowych, z użyciem precyzyjnych dalmierzy elektromagnetycznych 305

306 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 14: Pomiary przemieszczeń i odkształceń obiektów Przykładowe ilustracje do geodezyjnych pomiarów przemieszczeń powierzchni terenu pod wpływem eksploatacji górniczej (Źródło: Pielok J.: Badania deformacji powierzchni terenu i górotworu wywołanych eksploatacją górniczą. Wyd. AGH, Kraków, 2002) Obraz niecki osiadań w odwzorowaniu 3D [m] Linie jednakowych osiadań na tle pól eksploatacji [m] 306
307 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 15: Pomiary wodne TEMAT 15: POMIARY WODNE Mapy hydrograficzne i sozologiczne znaki umowne Wyznaczenie linii zalewowej w terenie Pomiar spadku zwierciadła wody 307
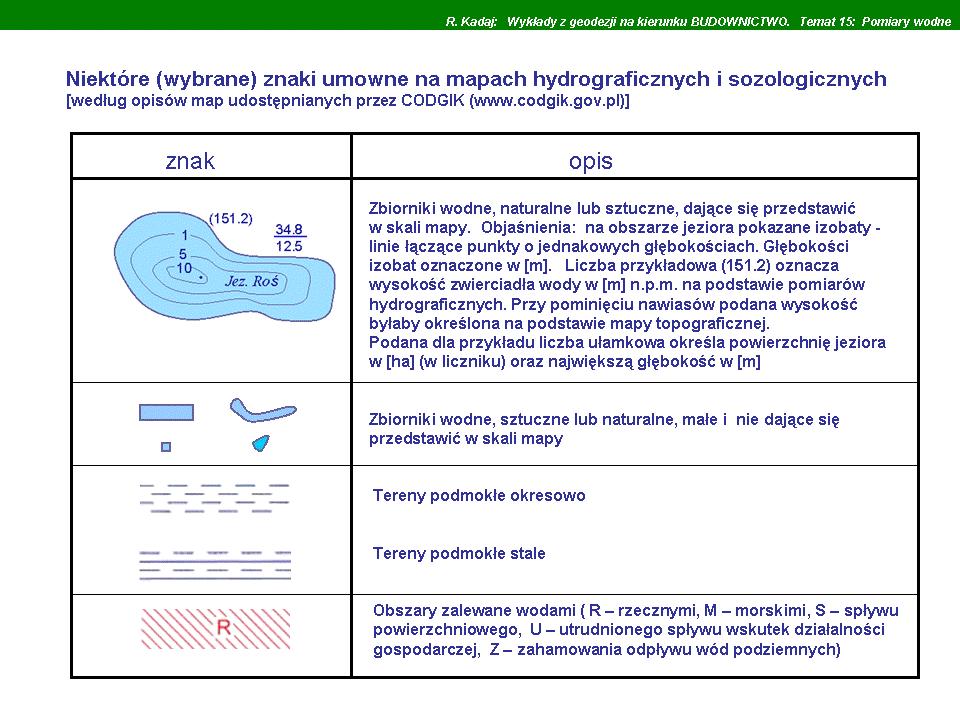
308 308
309 309
310 310
311 311
312 312
313 313
314 314
315 315
316 316
317 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 15: Pomiary wodne Wyznaczenie w terenie linii zalewowej linia (warstwica) zalewowa o wysokości Hz O P O Z H Z P (H P ) H P O Z = H P +O P H Z [ przy tym odczycie stopka łaty leży na wysokości H z ] reper lub inny punkt o znanej wysokości 317
, na tej samej linii brzegowej, do poziomu zwierciadła wody.")
318 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 15: Pomiary wodne Pomiar spadku zwierciadła wody Paliki wbijane synchronicznie (na sygnał), na tej samej linii brzegowej, do poziomu zwierciadła wody. Pomiar wzajemnych odległości d i,i+1 i różnic wysokości h i,i+1. Spadek na odcinku s i,i+1 = h k,k+1 / d k,k+1 Średni spadek: s = ( s i,i+1 ) / n (n liczba odcinków), s% = s 100% 318
319 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 16: Programy obliczeń geodezyjnych TEMAT 16: PROGRAMY OBLICZEŃ GEODEZYJNYCH Ogólne informacje o podstawowych programach obliczeń geodezyjnych oferowanych w Polsce Programy: C-GEO, Win Kalk, GeoNet Funkcje programów [ obliczenia osnów geodezyjnych poziomych, wysokościowych i trójwymiarowych, w tym sieci GPS i kombinowanych; opracowanie pomiarów sytuacyjno - wysokościowych, transformacje współrzędnych, wykonywanie szkiców; obliczenia specjalne dotyczące pomiarów przemieszczeń i odkształceń obiektów, pomiarów realizacyjnych i inne] 319

320 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 16: Programy obliczeń geodezyjnych Okno główne programu GeoNet 320
321 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 17: Systemy Informacji Przestrzennej (SIP) TEMAT 17: SYSTEMY INFORMACJI PRZESTRZENNEJ (SIP) Zadania SIP Rodzaje SIP w aspekcie zasięgu (skali) i szczegółowości (GIS - ang. Geographical Information System i SIT System Informacji o Terenie) Przykłady krajowych rozwiązań informatycznych w zakresie SIP 321
322 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 17: Systemy Informacji Przestrzennej (SIP) ZADANIA Systemów Informacji Przestrzennej (SIP): pozyskiwanie, gromadzenie, przetwarzanie i udostępnienie informacji przestrzennych. Zadania te realizują programy i systemy komputerowe posiadające m.in. następujące funkcje: tworzenie i aktualizacja zbiorów informacji przestrzennych (baz danych), w tym informacji odwzorowujących się w elementy graficzne mapy analizy i przetwarzania danych przestrzennych oraz ich udostępnianie w postaci definiowanej przez użytkownika W zakresie pozyskiwania zbiorów informacji przestrzennych programy SIP mogą mieć narzędzia przetwarzania oryginalnych (terenowych) zbiorów obserwacyjnych. Ponadto, oprogramowanie SIP może mieć dodatkowe funkcje obsługujące plany zagospodarowania przestrzennego. 322
323 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 17: Systemy Informacji Przestrzennej (SIP) RODZAJE SIP W ASPEKCIE ZASIĘGU (SKALI) I SZCZEGÓŁOWOŚCI GIS (Geografical Information System) zarządzający zbiorami informacji o znaczeniu ogólnogeograficznym i bazujący na mapach w skalach małych, 1:10000, 1:25000, 1:50000, 1: SIT (System Informacji o Terenie, ang. Land Information System) zarządzający zbiorami informacji szczegółowych, o znaczeniu gospodarczym, bazujący na mapach gospodarczych w skalach: 1: 500, 1:1000, 1:2000. PRZYKŁADY KRAJOWYCH ROZWIĄZAŃ INFORMATYCZNYCH W ZAKRESIE SIP: GEO-INFO produkt firmy SYSTHERM INFO (Poznań) korzysta z programu AutoCad firmy Autodesk oraz środowisk bazodanowych Oracle, jak też MS SQL Server. GEO-MAP system autonomiczny, o własnym środowisku graficzno numerycznym (w j. DELPHI). Produkt firmy GEO-SYSTEM (Warszawa) 323
324 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 17: Systemy Informacji Przestrzennej (SIP) Ilustracja procesu prezentacji graficznej w systemie GEO-MAP Przykładowe znaki umowne: punktowe specjalne liniowe powierzchniowe Źródło: W. Izdebski: Koncepcja i wdrożenia technologii GEO-MAP. Oficyna Wyd. PW, Geodezja, 52,
 Przykład ilustracji planu zagospodarowania na tle ewidencji gruntów w systemie GEO-MAP Źródło: W.")
325 R. Kadaj: Wykłady z geodezji na kierunku BUDOWNICTWO. Temat 17: Systemy Informacji Przestrzennej (SIP) Przykład ilustracji planu zagospodarowania na tle ewidencji gruntów w systemie GEO-MAP Źródło: W. Izdebski: Koncepcja i wdrożenia technologii GEO-MAP. Oficyna Wyd. PW, Geodezja, 52,
Zajęcia 1. Sprawy organizacyjne Podstawowe wiadomości z geodezji Wstęp do rachunku współrzędnych
 KATEDRA GEODEZJI im. Kaspra WEIGLA Wydział Budownictwa i Inżynierii Środowiska Zajęcia 1 Sprawy organizacyjne Podstawowe wiadomości z geodezji Wstęp do rachunku współrzędnych Autor: Dawid Zientek Skrypty
KATEDRA GEODEZJI im. Kaspra WEIGLA Wydział Budownictwa i Inżynierii Środowiska Zajęcia 1 Sprawy organizacyjne Podstawowe wiadomości z geodezji Wstęp do rachunku współrzędnych Autor: Dawid Zientek Skrypty
UKŁADY GEODEZYJNE I KARTOGRAFICZNE
 UKŁADY GEODEZYJNE I KARTOGRAFICZNE Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Model ZIEMI UKŁAD GEODEZYJNY I KARTOGRAFICZNY x y (f o,l o ) (x o,y o ) ZIEMIA
UKŁADY GEODEZYJNE I KARTOGRAFICZNE Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Model ZIEMI UKŁAD GEODEZYJNY I KARTOGRAFICZNY x y (f o,l o ) (x o,y o ) ZIEMIA
Zakres wiadomości i umiejętności z przedmiotu GEODEZJA OGÓLNA dla klasy 1ge Rok szkolny 2014/2015r.
 Zakres wiadomości i umiejętności z przedmiotu GEODEZJA OGÓLNA dla klasy 1ge - Definicja geodezji, jej podział i zadania. - Miary stopniowe. - Miary długości. - Miary powierzchni pola. - Miary gradowe.
Zakres wiadomości i umiejętności z przedmiotu GEODEZJA OGÓLNA dla klasy 1ge - Definicja geodezji, jej podział i zadania. - Miary stopniowe. - Miary długości. - Miary powierzchni pola. - Miary gradowe.
II Konferencja Użytkowników ASG-EUPOS
 Katedra Geodezji im. K. Weigla II Konferencja Użytkowników ASG-EUPOS Katowice, 20-21 listopad 2012 Problematyka wykorzystania serwisów postprocessingu ASG-EUPOS do zakładania precyzyjnych sieci hybrydowych
Katedra Geodezji im. K. Weigla II Konferencja Użytkowników ASG-EUPOS Katowice, 20-21 listopad 2012 Problematyka wykorzystania serwisów postprocessingu ASG-EUPOS do zakładania precyzyjnych sieci hybrydowych
Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów współrzędnych
 Załącznik nr 1 Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów Tabela 1. Parametry techniczne geodezyjnego układu odniesienia PL-ETRF2000 Parametry techniczne geodezyjnego
Załącznik nr 1 Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów Tabela 1. Parametry techniczne geodezyjnego układu odniesienia PL-ETRF2000 Parametry techniczne geodezyjnego
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
odwzorowanie równokątne elipsoidy Krasowskiego
 odwzorowanie równokątne elipsoidy Krasowskiego wprowadzony w 1952 roku jako matematyczną powierzchnię odniesienia zastosowano elipsoidę lokalną Krasowskiego z punktem przyłożenia do geoidy w Pułkowie odwzorowanie
odwzorowanie równokątne elipsoidy Krasowskiego wprowadzony w 1952 roku jako matematyczną powierzchnię odniesienia zastosowano elipsoidę lokalną Krasowskiego z punktem przyłożenia do geoidy w Pułkowie odwzorowanie
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Układy współrzędnych. Gospodarka Przestrzenna. Józef Woźniak. Na podstawie wykładu Prof. R. Kadaja i Prof. E. Osady Na studium GIS
 Układy współrzędnych Gospodarka Przestrzenna Józef Woźniak gis@pwr.wroc.pl Zakład Geodezji i Geoinformatyki Na podstawie wykładu Prof. R. Kadaja i Prof. E. Osady Na studium GIS Wrocław, 2012 Podział map
Układy współrzędnych Gospodarka Przestrzenna Józef Woźniak gis@pwr.wroc.pl Zakład Geodezji i Geoinformatyki Na podstawie wykładu Prof. R. Kadaja i Prof. E. Osady Na studium GIS Wrocław, 2012 Podział map
Wykład 2. Matematyczne podstawy map. Mapa zasadnicza tradycyjna i cyfrowa. Wykład 2 1
 Wykład 2 Matematyczne podstawy map. Mapa zasadnicza tradycyjna i cyfrowa Wykład 2 1 Mapa - graficzna forma przekazu informacji o Ziemi. Wykład 2 2 Mapa Głównym zadaniem geodezji jest stworzenie obrazu
Wykład 2 Matematyczne podstawy map. Mapa zasadnicza tradycyjna i cyfrowa Wykład 2 1 Mapa - graficzna forma przekazu informacji o Ziemi. Wykład 2 2 Mapa Głównym zadaniem geodezji jest stworzenie obrazu
MIESIĄC NR TEMAT LEKCJI UWAGI 1 Lekcja organizacyjna, BHP na lekcji. 4 Powtórzenie i utrwalenie wiadomości z klasy I sem. I
 Rozkład materiału nauczania w roku szkolnym 2016/2017, kl. II TG Geodezja Ogólna, ( II kl.-6h) mgr inż. Joanna Guzik, TECHNIK GEODETA 311104 Książka Andrzej Jagielski Geodezja I, Geodezja II MIESIĄC NR
Rozkład materiału nauczania w roku szkolnym 2016/2017, kl. II TG Geodezja Ogólna, ( II kl.-6h) mgr inż. Joanna Guzik, TECHNIK GEODETA 311104 Książka Andrzej Jagielski Geodezja I, Geodezja II MIESIĄC NR
Układ współrzędnych dwu trój Wykład 2 "Układ współrzędnych, system i układ odniesienia"
 Układ współrzędnych Układ współrzędnych ustanawia uporządkowaną zależność (relację) między fizycznymi punktami w przestrzeni a liczbami rzeczywistymi, czyli współrzędnymi, Układy współrzędnych stosowane
Układ współrzędnych Układ współrzędnych ustanawia uporządkowaną zależność (relację) między fizycznymi punktami w przestrzeni a liczbami rzeczywistymi, czyli współrzędnymi, Układy współrzędnych stosowane
Wykład 3. Poziome sieci geodezyjne - od triangulacji do poligonizacji. Wykład 3
 Poziome sieci geodezyjne - od triangulacji do poligonizacji. 1 Współrzędne prostokątne i biegunowe na płaszczyźnie Geodeci wiążą osie x,y z geograficznymi kierunkami; oś x kierują na północ (N), a oś y
Poziome sieci geodezyjne - od triangulacji do poligonizacji. 1 Współrzędne prostokątne i biegunowe na płaszczyźnie Geodeci wiążą osie x,y z geograficznymi kierunkami; oś x kierują na północ (N), a oś y
Układy odniesienia i systemy współrzędnych stosowane w serwisach ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Układy odniesienia i systemy współrzędnych stosowane w serwisach ASG-EUPOS Wiesław Graszka naczelnik
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Układy odniesienia i systemy współrzędnych stosowane w serwisach ASG-EUPOS Wiesław Graszka naczelnik
Wykład 5. Pomiary sytuacyjne. Wykład 5 1
 Wykład 5 Pomiary sytuacyjne Wykład 5 1 Proste pomiary polowe Tyczenie linii prostych Tyczenie kątów prostych Pomiar szczegółów topograficznych: - metoda ortogonalna, - metoda biegunowa, - związek liniowy.
Wykład 5 Pomiary sytuacyjne Wykład 5 1 Proste pomiary polowe Tyczenie linii prostych Tyczenie kątów prostych Pomiar szczegółów topograficznych: - metoda ortogonalna, - metoda biegunowa, - związek liniowy.
Przegląd państwowych układów współrzędnych płaskich stosowanych do tworzenia map w Polsce po 1945 roku. Autor: Arkadiusz Piechota
 Przegląd państwowych układów współrzędnych płaskich stosowanych do tworzenia map w Polsce po 1945 roku Autor: Arkadiusz Piechota Przegląd państwowych układów współrzędnych płaskich stosowanych do tworzenia
Przegląd państwowych układów współrzędnych płaskich stosowanych do tworzenia map w Polsce po 1945 roku Autor: Arkadiusz Piechota Przegląd państwowych układów współrzędnych płaskich stosowanych do tworzenia
Wykład 1. Wprowadzenie do przedmiotu. Powierzchnia odniesienia w pomiarach inżynierskich.
 Wykład 1 Wprowadzenie do przedmiotu. Powierzchnia odniesienia w pomiarach inżynierskich. Dr inż. Sabina Łyszkowicz Wita Studentów I Roku Inżynierii Środowiska na Pierwszym Wykładzie z Geodezji wykład 1
Wykład 1 Wprowadzenie do przedmiotu. Powierzchnia odniesienia w pomiarach inżynierskich. Dr inż. Sabina Łyszkowicz Wita Studentów I Roku Inżynierii Środowiska na Pierwszym Wykładzie z Geodezji wykład 1
Księgarnia PWN: Wiesław Kosiński - Geodezja. Spis treści
 Księgarnia PWN: Wiesław Kosiński - Geodezja Wstęp........................................................ 1 1. WIADOMOŚCI PODSTAWOWE.................................... 3 1.1. Rys historyczny rozwoju geodezji
Księgarnia PWN: Wiesław Kosiński - Geodezja Wstęp........................................................ 1 1. WIADOMOŚCI PODSTAWOWE.................................... 3 1.1. Rys historyczny rozwoju geodezji
Sprzęt do pomiaru różnic wysokości
 PodstawyGeodezji Sprzęt do pomiaru różnic wysokości mgr inż. Geodeta Tomasz Miszczak e-mail: tomasz@miszczak.waw.pl Niwelatory Niwelator jest to instrument geodezyjny umożliwiający wykonywanie pomiarów
PodstawyGeodezji Sprzęt do pomiaru różnic wysokości mgr inż. Geodeta Tomasz Miszczak e-mail: tomasz@miszczak.waw.pl Niwelatory Niwelator jest to instrument geodezyjny umożliwiający wykonywanie pomiarów
Spis treści. Przedmowa Pojęcie powierzchni odniesienia jako powierzchni oryginału w odwzorowaniu kartograficznym
 Spis treści Przedmowa................................................................... 11 1. Pojęcie powierzchni odniesienia jako powierzchni oryginału w odwzorowaniu kartograficznym......................................................................
Spis treści Przedmowa................................................................... 11 1. Pojęcie powierzchni odniesienia jako powierzchni oryginału w odwzorowaniu kartograficznym......................................................................
Projekt nowelizacji RRM w sprawie systemu odniesień przestrzennych z dnia r.
 Projekt nowelizacji RRM w sprawie systemu odniesień przestrzennych z dnia 10.01.2008r. ROZPORZĄDZENIE RADY MINISTRÓW z dnia 2008 r. w sprawie państwowego systemu odniesień przestrzennych Na podstawie art.
Projekt nowelizacji RRM w sprawie systemu odniesień przestrzennych z dnia 10.01.2008r. ROZPORZĄDZENIE RADY MINISTRÓW z dnia 2008 r. w sprawie państwowego systemu odniesień przestrzennych Na podstawie art.
GEODEZJA WYKŁAD Pomiary kątów
 GEODEZJA WYKŁAD Pomiary kątów Katedra Geodezji im. K. Weigla ul. Poznańska 2/34 Do rozwiązywania zadań z geodezji konieczna jest znajomość kątów w figurach i bryłach obiektów. W geodezji przyjęto mierzyć:
GEODEZJA WYKŁAD Pomiary kątów Katedra Geodezji im. K. Weigla ul. Poznańska 2/34 Do rozwiązywania zadań z geodezji konieczna jest znajomość kątów w figurach i bryłach obiektów. W geodezji przyjęto mierzyć:
Układy współrzędnych
 Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Geodezja / Wiesław Kosiński. - wyd. 6, dodr.1. Warszawa, Spis treści. Wstęp 1
 Geodezja / Wiesław Kosiński. - wyd. 6, dodr.1. Warszawa, 2011 Spis treści Wstęp 1 1. WIADOMOŚCI PODSTAWOWE 3 1.1. Rys historyczny rozwoju geodezji na świecie i w Polsce 3 1.2. Podziały geodezji 6 1.3.
Geodezja / Wiesław Kosiński. - wyd. 6, dodr.1. Warszawa, 2011 Spis treści Wstęp 1 1. WIADOMOŚCI PODSTAWOWE 3 1.1. Rys historyczny rozwoju geodezji na świecie i w Polsce 3 1.2. Podziały geodezji 6 1.3.
Kartografia - wykład
 prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKOWYCH, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Mapy topograficzne i geologiczne Część 1 MAPA Graficzny, określony matematycznie
prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKOWYCH, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Mapy topograficzne i geologiczne Część 1 MAPA Graficzny, określony matematycznie
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Układy współrzędnych GiK/GP
 Układy współrzędnych GiK/GP Józef Woźniak gis@pwr.wroc.pl Zakład Geodezji i Geoinformatyki Na podstawie wykładu Prof. R. Kadaja i Prof. E. Osady Podział map Mapy geograficzne I. Mapy ogólnogeograficzne:
Układy współrzędnych GiK/GP Józef Woźniak gis@pwr.wroc.pl Zakład Geodezji i Geoinformatyki Na podstawie wykładu Prof. R. Kadaja i Prof. E. Osady Podział map Mapy geograficzne I. Mapy ogólnogeograficzne:
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W celu ujednolicenia wyników pomiarów geodezyjnych, a co za tym idzie umożliwienia tworzenia
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W celu ujednolicenia wyników pomiarów geodezyjnych, a co za tym idzie umożliwienia tworzenia
ZAKRES EGZAMINU DYPLOMOWEGO ST.1 GiK 2016/17
 ZAKRES EGZAMINU DYPLOMOWEGO ST.1 GiK 2016/17 1. Omów sieć geodezyjną do wyznaczania deformacji i przemieszczeń obiektów inżynierskich. 2. Scharakteryzuj petrologię skał magmowych. 3. Opisz procedurę podział
ZAKRES EGZAMINU DYPLOMOWEGO ST.1 GiK 2016/17 1. Omów sieć geodezyjną do wyznaczania deformacji i przemieszczeń obiektów inżynierskich. 2. Scharakteryzuj petrologię skał magmowych. 3. Opisz procedurę podział
Standard techniczny określający zasady i dokładności pomiarów geodezyjnych dla zakładania wielofunkcyjnych znaków regulacji osi toru Ig-7
 Załącznik do zarządzenia Nr 27/2012 Zarządu PKP Polskie Linie Kolejowe S.A. z dnia 19 listopada 2012 r. Standard techniczny określający zasady i dokładności pomiarów geodezyjnych dla zakładania wielofunkcyjnych
Załącznik do zarządzenia Nr 27/2012 Zarządu PKP Polskie Linie Kolejowe S.A. z dnia 19 listopada 2012 r. Standard techniczny określający zasady i dokładności pomiarów geodezyjnych dla zakładania wielofunkcyjnych
1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18
 : Przedmowa...... 11 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ Z historii geodezji... 13 1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18 1.2.
: Przedmowa...... 11 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ Z historii geodezji... 13 1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18 1.2.
GEODEZJA WYKŁAD Niwelacja Katedra Geodezji im. K. Weigla ul. Poznańska 2/34
 GEODEZJA WYKŁAD Niwelacja Katedra Geodezji im. K. Weigla ul. Poznańska 2/34 Niwelacja [franc.] to pomiary polegające na wyznaczaniu wysokości punktów względem przyjętego poziomu odniesienia. Zależnie od
GEODEZJA WYKŁAD Niwelacja Katedra Geodezji im. K. Weigla ul. Poznańska 2/34 Niwelacja [franc.] to pomiary polegające na wyznaczaniu wysokości punktów względem przyjętego poziomu odniesienia. Zależnie od
SPOSÓB PRZELICZANIA WSPÓŁRZĘDNYCH Z UKŁADU 1965 NA UKŁAD
 SPOSÓB PRZELICZANIA WSPÓŁRZĘDNYCH Z UKŁADU 1965 NA UKŁAD 000 7 Tomasz Bajak SPOSÓB PRZELICZANIA WSPÓŁRZĘDNYCH Z UKŁADU 1965 NA UKŁAD 000 Podstawowe definicje układu 1965 Układ odniesienia 194 był układem
SPOSÓB PRZELICZANIA WSPÓŁRZĘDNYCH Z UKŁADU 1965 NA UKŁAD 000 7 Tomasz Bajak SPOSÓB PRZELICZANIA WSPÓŁRZĘDNYCH Z UKŁADU 1965 NA UKŁAD 000 Podstawowe definicje układu 1965 Układ odniesienia 194 był układem
GEODEZJA 2 Wykład + Ćwiczenia dr inż. Krzysztof Deska Katedra Geodezji
 GEODEZJA 2 Wykład + Ćwiczenia dr inż. Krzysztof Deska Katedra Geodezji konsultacje semestr zimowy rok akademicki 2018/2019 p. 307-1I/sala 9I studia stacjonarne: środa 10:00-13:00 studia niestacjonarne:
GEODEZJA 2 Wykład + Ćwiczenia dr inż. Krzysztof Deska Katedra Geodezji konsultacje semestr zimowy rok akademicki 2018/2019 p. 307-1I/sala 9I studia stacjonarne: środa 10:00-13:00 studia niestacjonarne:
TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD 10
 TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD 10 Fotogrametria to technika pomiarowa oparta na obrazach fotograficznych. Wykorzystywana jest ona do opracowywani map oraz do różnego rodzaju zadań pomiarowych.
TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD 10 Fotogrametria to technika pomiarowa oparta na obrazach fotograficznych. Wykorzystywana jest ona do opracowywani map oraz do różnego rodzaju zadań pomiarowych.
III. GRUPY PRZEDMIOTÓW I MINIMALNE OBCIĄŻENIA GODZINOWE:
 Załącznik Nr 6 Standardy nauczania dla kierunku studiów: geodezja i kartografia STUDIA MAGISTERSKIE I. WYMAGANIA OGÓLNE Studia magisterskie na kierunku geodezja i kartografia trwają nie mniej niż 5 lat
Załącznik Nr 6 Standardy nauczania dla kierunku studiów: geodezja i kartografia STUDIA MAGISTERSKIE I. WYMAGANIA OGÓLNE Studia magisterskie na kierunku geodezja i kartografia trwają nie mniej niż 5 lat
w zależności od powierzchni, jaka została użyta do odwzorowania siatki kartograficznej, wyróżniać będziemy 3 typy odwzorowań:
 Elementy mapy mapa jest płaskim obrazem powierzchni Ziemi lub jej części przedstawionym na płaszczyźnie w odpowiednim zmniejszeniu; siatka kartograficzna będzie się zawsze różniła od siatki geograficznej;
Elementy mapy mapa jest płaskim obrazem powierzchni Ziemi lub jej części przedstawionym na płaszczyźnie w odpowiednim zmniejszeniu; siatka kartograficzna będzie się zawsze różniła od siatki geograficznej;
NIWELATORY TECHNICZNE
 NIWELATORY TECHNICZNE NIWELATORY TECHNICZNE Niwelatory służą też do wyznaczania kierunku poziomego lub pomiaru małych kątów odchylenia osi celowej cc od poziomu. Podział niwelatorów: ze względu na zasadę
NIWELATORY TECHNICZNE NIWELATORY TECHNICZNE Niwelatory służą też do wyznaczania kierunku poziomego lub pomiaru małych kątów odchylenia osi celowej cc od poziomu. Podział niwelatorów: ze względu na zasadę
Geodezja czyli sztuka mierzenia Ziemi
 1 PODSTAWOWE WIADOMOŚCI Z GEODEZJI... 10 1.1 FIGURA ZIEMI... 10 1.2 FIZYCZNA POWIERZCHNIA ZIEMI, ELIPSOIDA, GEOIDA... 13 1.3 GEOIDA A ŚREDNI POZIOM MORZA... 14 1.4 ELIPSOIDA... 16 1.5 KRÓTKA HISTORIA GEODEZJI...
1 PODSTAWOWE WIADOMOŚCI Z GEODEZJI... 10 1.1 FIGURA ZIEMI... 10 1.2 FIZYCZNA POWIERZCHNIA ZIEMI, ELIPSOIDA, GEOIDA... 13 1.3 GEOIDA A ŚREDNI POZIOM MORZA... 14 1.4 ELIPSOIDA... 16 1.5 KRÓTKA HISTORIA GEODEZJI...
Wykład 9. Tachimetria, czyli pomiary sytuacyjnowysokościowe. Tachimetria, czyli pomiary
 Wykład 9 sytuacyjnowysokościowe 1 Niwelacja powierzchniowa metodą punktów rozproszonych Przed przystąpieniem do pomiaru należy dany obszar pokryć siecią poligonową. Punkty poligonowe utrwalamy palikami
Wykład 9 sytuacyjnowysokościowe 1 Niwelacja powierzchniowa metodą punktów rozproszonych Przed przystąpieniem do pomiaru należy dany obszar pokryć siecią poligonową. Punkty poligonowe utrwalamy palikami
Niwelacja. 2 reperów
 2 reperów Niwelacja 2.1. Repery pomiarowe Reper Reper jest zasadniczym elementem znaku wysokościowego (rys. 2.1.1) lub samodzielnym znakiem wysokościowym wykonanym najczęściej z metalu i mającym jednoznacznie
2 reperów Niwelacja 2.1. Repery pomiarowe Reper Reper jest zasadniczym elementem znaku wysokościowego (rys. 2.1.1) lub samodzielnym znakiem wysokościowym wykonanym najczęściej z metalu i mającym jednoznacznie
Wyrównanie podstawowej osnowy geodezyjnej na obszarze Polski
 Centralny Ośrodek Dokumentacji Geodezyjnej i Kartograficznej Dział Osnów Podstawowych Wyrównanie podstawowej osnowy geodezyjnej na obszarze Polski Ewa Kałun kierownik działu osnów podstawowych CODGiK Warszawa,
Centralny Ośrodek Dokumentacji Geodezyjnej i Kartograficznej Dział Osnów Podstawowych Wyrównanie podstawowej osnowy geodezyjnej na obszarze Polski Ewa Kałun kierownik działu osnów podstawowych CODGiK Warszawa,
PIONY, PIONOWNIKI, CENTROWNIKI PRZYRZĄDY SŁUŻĄCE DO CENTROWANIA INSTRUMENTÓW I SYGNAŁÓW
 PIONY, PIONOWNIKI, CENTROWNIKI PRZYRZĄDY SŁUŻĄCE DO CENTROWANIA INSTRUMENTÓW I SYGNAŁÓW ZADANIE PIONÓW: ustawienie instrumentu i sygnału centrycznie nad punktem. ZADANIE PIONOWNIKOW: badanie pionowości,
PIONY, PIONOWNIKI, CENTROWNIKI PRZYRZĄDY SŁUŻĄCE DO CENTROWANIA INSTRUMENTÓW I SYGNAŁÓW ZADANIE PIONÓW: ustawienie instrumentu i sygnału centrycznie nad punktem. ZADANIE PIONOWNIKOW: badanie pionowości,
Punkty geodezyjne Wykład 9 "Poziome sieci geodezyjne - od triangulacji do poligonizacji" 4
 Punkty geodezyjne Jeśli znaczne obszary Ziemi są mierzone, to pierwszą czynnością jest umieszczenie w terenie (stabilizacja) punktów geodezyjnych Punkty te są stabilizowane w terenie lub wybierane na budowlach
Punkty geodezyjne Jeśli znaczne obszary Ziemi są mierzone, to pierwszą czynnością jest umieszczenie w terenie (stabilizacja) punktów geodezyjnych Punkty te są stabilizowane w terenie lub wybierane na budowlach
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 201 CZĘŚĆ PISEMNA
 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów Oznaczenie kwalifikacji: B.34 Wersja arkusza: X Układ graficzny CKE 2013 Arkusz zawiera informacje
Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów Oznaczenie kwalifikacji: B.34 Wersja arkusza: X Układ graficzny CKE 2013 Arkusz zawiera informacje
TECHNOLOGIA REALIZACJI PAŃSTWOWEGO UKŁADU WSPÓŁRZĘDNYCH 2000 NA OBSZARZE POWIATU
 XX JUBILEUSZOWA JESIENNA SZKOŁA GEODEZJI im. Jacka Rejmana WSPÓŁCZESNE METODY POZYSKIWANIA I MODELOWANIA GEODANYCH Polanica Zdrój, 16-18 września 2007 r. TECHNOLOGIA REALIZACJI PAŃSTWOWEGO UKŁADU WSPÓŁRZĘDNYCH
XX JUBILEUSZOWA JESIENNA SZKOŁA GEODEZJI im. Jacka Rejmana WSPÓŁCZESNE METODY POZYSKIWANIA I MODELOWANIA GEODANYCH Polanica Zdrój, 16-18 września 2007 r. TECHNOLOGIA REALIZACJI PAŃSTWOWEGO UKŁADU WSPÓŁRZĘDNYCH
SPIS TREŚCI GEODEZJA I:
 SPIS TREŚCI GEODEZJA I: Przedmowa... 8 Rozdział 1: Wiadomości wstępne... 9 1.1. Definicja, zadania i podział geodezji...9 1.2. Powierzchnie odniesienia... 11 1.3. Geodezyjny system odniesień przestrzennych...
SPIS TREŚCI GEODEZJA I: Przedmowa... 8 Rozdział 1: Wiadomości wstępne... 9 1.1. Definicja, zadania i podział geodezji...9 1.2. Powierzchnie odniesienia... 11 1.3. Geodezyjny system odniesień przestrzennych...
WARUNKI TECHNICZNE I. OBOWIĄZUJĄCE PRZEPISY PRAWNE I TECHNICZNE. 1. Przepisy prawne:
 WARUNKI TECHNICZNE Założenia i pomiaru szczegółowej poziomej osnowy geodezyjnej III klasy na obszarze powiatu myśliborskiego z wyłączeniem terenów miejskich. I. OBOWIĄZUJĄCE PRZEPISY PRAWNE I TECHNICZNE
WARUNKI TECHNICZNE Założenia i pomiaru szczegółowej poziomej osnowy geodezyjnej III klasy na obszarze powiatu myśliborskiego z wyłączeniem terenów miejskich. I. OBOWIĄZUJĄCE PRZEPISY PRAWNE I TECHNICZNE
Pomiary kątów WYKŁAD 4
 Pomiary kątów WYKŁAD 4 POMIAR KĄTÓW W geodezji mierzy się: kąty poziome (horyzontalne) α =(0,360 o ) kąty pionowe (wertykalne) β =(0,90 o ;0,-90 o ) kąty zenitalne z = (0,180 o ) (w których kierunkiem
Pomiary kątów WYKŁAD 4 POMIAR KĄTÓW W geodezji mierzy się: kąty poziome (horyzontalne) α =(0,360 o ) kąty pionowe (wertykalne) β =(0,90 o ;0,-90 o ) kąty zenitalne z = (0,180 o ) (w których kierunkiem
Lp. Promotor Temat Dyplomant 1. Dr inż. A. Dumalski. Badanie dokładności użytkowej niwelatora cyfrowego 3. Dr inż. A. Dumalski
 2009/2010 propozycje tematów prac dyplomowych na studiach stacjonarnych magisterskich II stopnia realizowanych w Instytucie Geodezji Specjalność geodezja gospodarcza Olsztyn Limit 18 Lp. Promotor Temat
2009/2010 propozycje tematów prac dyplomowych na studiach stacjonarnych magisterskich II stopnia realizowanych w Instytucie Geodezji Specjalność geodezja gospodarcza Olsztyn Limit 18 Lp. Promotor Temat
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Ocena wykorzystania algorytmów interpolacyjnych do redukcji ilości danych pozyskiwanych w sposób
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Ocena wykorzystania algorytmów interpolacyjnych do redukcji ilości danych pozyskiwanych w sposób
Wykorzystanie ASG-EUPOS do integracji osnowy wysokościowej. Piotr Banasik Akademia Górniczo-Hutnicza w Krakowie
 Wykorzystanie ASG-EUPOS do integracji osnowy wysokościowej Piotr Banasik Akademia Górniczo-Hutnicza w Krakowie 1 Plan prezentacji: Szczególne znaczenie ASG-EUPOS w zakresie integracji wysokościowej Integracja
Wykorzystanie ASG-EUPOS do integracji osnowy wysokościowej Piotr Banasik Akademia Górniczo-Hutnicza w Krakowie 1 Plan prezentacji: Szczególne znaczenie ASG-EUPOS w zakresie integracji wysokościowej Integracja
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA
 Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu materiały przygotowane m.in. w oparciu o rozdział Odwzorowania
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu materiały przygotowane m.in. w oparciu o rozdział Odwzorowania
PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA IM. KS. BRONISŁAWA MARKIEWICZA W JAROSŁAWIU. Syllabus
 PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA IM. KS. BRONISŁAWA MARKIEWICZA W JAROSŁAWIU Syllabus. Podstawowe informacje o przedmiocie Imię i nazwisko prowadzącego Tytuł, stopień naukowy Mariusz Frukacz dr inż. Instytut
PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA IM. KS. BRONISŁAWA MARKIEWICZA W JAROSŁAWIU Syllabus. Podstawowe informacje o przedmiocie Imię i nazwisko prowadzącego Tytuł, stopień naukowy Mariusz Frukacz dr inż. Instytut
kataster, numeryczne modele terenu, tachimetria elektroniczna czy GPS, wykorzystywane coraz częściej do pozyskiwania, analizowania i przetwarzania
 Wstęp Rozwój gospodarczy wymaga racjonalnego zarządzania i gospodarowania terenami oraz zasobami (np. wodnymi czy glebowymi). Do realizacji tych celów niezbędna jest odpowiednia informacja przestrzenna.
Wstęp Rozwój gospodarczy wymaga racjonalnego zarządzania i gospodarowania terenami oraz zasobami (np. wodnymi czy glebowymi). Do realizacji tych celów niezbędna jest odpowiednia informacja przestrzenna.
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011
 TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH KRÓTKA
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA I GEOINFORMATYKA PROMOTOR TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH KRÓTKA
SPECYFIKACJE TECHNICZNE D ODTWORZENIE TRASY I PUNKTÓW WYSOKOŚCIOWYCH CPV-45111
 SPECYFIKACJE TECHNICZNE D-01.01.01 ODTWORZENIE TRASY I PUNKTÓW WYSOKOŚCIOWYCH CPV-45111 1. WSTĘP. Nazwa zamówienia : Przebudowa drogi gminnej ul.brzozowej w Mzykach. Inwestor : Gmina i miasto Koziegłowy
SPECYFIKACJE TECHNICZNE D-01.01.01 ODTWORZENIE TRASY I PUNKTÓW WYSOKOŚCIOWYCH CPV-45111 1. WSTĘP. Nazwa zamówienia : Przebudowa drogi gminnej ul.brzozowej w Mzykach. Inwestor : Gmina i miasto Koziegłowy
Obliczenia w geodezyjnym układzie współrzędnych
 Politechnika Warszawska Wydział Instalacji udowlanych, Hydrotechniki i Inżynierii Środowiska Obliczenia w geodezyjnym układzie współrzędnych Wykład nr 4 Jerzy Kulesza j.kulesza@il.pw.edu.pl Instytut Dróg
Politechnika Warszawska Wydział Instalacji udowlanych, Hydrotechniki i Inżynierii Środowiska Obliczenia w geodezyjnym układzie współrzędnych Wykład nr 4 Jerzy Kulesza j.kulesza@il.pw.edu.pl Instytut Dróg
Geodezja fizyczna i grawimetria geodezyjna. Teoria i praktyka
 Zapraszamy do sklepu www.sklep.geoezja.pl I-NET.PL Sp.J. o. GeoSklep Olsztyn, ul. Cementowa 3/301 tel. +48 609 571 271, 89 670 11 00, 58 7 421 571 faks 89 670 11 11, 58 7421 871 e-mail sklep@geodezja.pl
Zapraszamy do sklepu www.sklep.geoezja.pl I-NET.PL Sp.J. o. GeoSklep Olsztyn, ul. Cementowa 3/301 tel. +48 609 571 271, 89 670 11 00, 58 7 421 571 faks 89 670 11 11, 58 7421 871 e-mail sklep@geodezja.pl
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych, wysokościowych i realizacyjnych oraz opracowywanie wyników tych pomiarów
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych, wysokościowych i realizacyjnych oraz opracowywanie wyników tych pomiarów
LIBELE EGZAMINATOR LIBEL I KOMPENSATORÓW KOLIMATOR GEODEZYJNY
 LIBELE EGZAMINATOR LIBEL I KOMPENSATORÓW KOLIMATOR GEODEZYJNY LIBELA przyrząd umożliwiający orientowanie ustawianie prostych i płaszczyzn w zadanym kierunku (najczęściej kierunku poziomym lub pionowym)
LIBELE EGZAMINATOR LIBEL I KOMPENSATORÓW KOLIMATOR GEODEZYJNY LIBELA przyrząd umożliwiający orientowanie ustawianie prostych i płaszczyzn w zadanym kierunku (najczęściej kierunku poziomym lub pionowym)
ODWZOROWANIA KARTOGRAFICZNE
 ODWZOROWANIA KARTOGRAFICZNE Określenie położenia Podstawą systemów geoinformacyjnych są mapy cyfrowe, będące pochodną tradycyjnych map analogowych. Układem opisującym położenie danych na powierzchni Ziemi
ODWZOROWANIA KARTOGRAFICZNE Określenie położenia Podstawą systemów geoinformacyjnych są mapy cyfrowe, będące pochodną tradycyjnych map analogowych. Układem opisującym położenie danych na powierzchni Ziemi
4. Odwzorowania kartograficzne
 4. Odwzorowania kartograficzne PRZYPOMNIJMY! SIATKA GEOGRAFICZNA układ południków i równoleżników wyznaczony na kuli ziemskiej lub na globusie. Nie występują tu zniekształcenia. SIATKA KARTOGRAFICZNA układ
4. Odwzorowania kartograficzne PRZYPOMNIJMY! SIATKA GEOGRAFICZNA układ południków i równoleżników wyznaczony na kuli ziemskiej lub na globusie. Nie występują tu zniekształcenia. SIATKA KARTOGRAFICZNA układ
TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD IX
 TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD IX to technika pomiarowa oparta na obrazach fotograficznych. Taki obraz uzyskiwany jest dzięki wykorzystaniu kamery lub aparatu. Obraz powstaje na specjalnym
TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD IX to technika pomiarowa oparta na obrazach fotograficznych. Taki obraz uzyskiwany jest dzięki wykorzystaniu kamery lub aparatu. Obraz powstaje na specjalnym
GPSz2 WYKŁAD 15 SZCZEGÓŁOWA WYSOKOŚCIOWA OSNOWA GEODEZYJNA
 GPSz2 WYKŁAD 15 SZCZEGÓŁOWA WYSOKOŚCIOWA OSNOWA GEODEZYJNA 1 STANDARD TECHNICZNY ZAŁACZNIK NR 1 DO ROZPORZĄDZENIA 2 3 4 5 TO TZW. POŚREDNIE WYMAGANIA DOKŁADNOŚCIOWE 6 Przy niwelacji w druku dziennika pomiaru
GPSz2 WYKŁAD 15 SZCZEGÓŁOWA WYSOKOŚCIOWA OSNOWA GEODEZYJNA 1 STANDARD TECHNICZNY ZAŁACZNIK NR 1 DO ROZPORZĄDZENIA 2 3 4 5 TO TZW. POŚREDNIE WYMAGANIA DOKŁADNOŚCIOWE 6 Przy niwelacji w druku dziennika pomiaru
Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE Opracowanie: Ryszard Pażus
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ PRZEPISY PRAWNE I STANDARDY TECHNICZNE CZĘŚĆ 2 : STANDARDY TECHNICZNE Opracowanie: Ryszard Pażus
Zagadnienia na egzamin inżynierski z zakresu geodezji i kartografii (Katerdra Geodezji) kierunek Geodezja i Kartografia
 kierunek Geodezja i Kartografia") Zagadnienia na egzamin inżynierski z zakresu geodezji i kartografii (Katerdra Geodezji) 1. Powierzchnie odniesienia i układy współrzędnych stosowane w geodezji 2. Klasyfikacja osnów geodezyjnych (według
Zagadnienia na egzamin inżynierski z zakresu geodezji i kartografii (Katerdra Geodezji) 1. Powierzchnie odniesienia i układy współrzędnych stosowane w geodezji 2. Klasyfikacja osnów geodezyjnych (według
Geodezja, Teoria i Praktyka, Tom 1, Edward Osada kod produktu: 3700 kategoria: Kategorie > WYDAWNICTWA > KSIĄŻKI > GEODEZJA
 Zapraszamy do sklepu www.sklep.geoezja.pl I-NET.PL Sp.J. o. GeoSklep Olsztyn, ul. Cementowa 3/301 tel. +48 609 571 271, 89 670 11 00, 58 7 421 571 faks 89 670 11 11, 58 7421 871 e-mail sklep@geodezja.pl
Zapraszamy do sklepu www.sklep.geoezja.pl I-NET.PL Sp.J. o. GeoSklep Olsztyn, ul. Cementowa 3/301 tel. +48 609 571 271, 89 670 11 00, 58 7 421 571 faks 89 670 11 11, 58 7421 871 e-mail sklep@geodezja.pl
Wykład 2 Układ współrzędnych, system i układ odniesienia
 Wykład 2 Układ współrzędnych, system i układ odniesienia Prof. dr hab. Adam Łyszkowicz Katedra Geodezji Szczegółowej UWM w Olsztynie adaml@uwm.edu.pl Heweliusza 12, pokój 04 Spis treści Układ współrzędnych
Wykład 2 Układ współrzędnych, system i układ odniesienia Prof. dr hab. Adam Łyszkowicz Katedra Geodezji Szczegółowej UWM w Olsztynie adaml@uwm.edu.pl Heweliusza 12, pokój 04 Spis treści Układ współrzędnych
3a. Mapa jako obraz Ziemi
 3a. Mapa jako obraz Ziemi MAPA: obraz powierzchni Ziemi (ciała niebieskiego) lub jej części przedstawiony na płaszczyźnie, w ściśle określonym zmniejszeniu (skali), w odwzorowaniu kartograficznym (matematycznym
3a. Mapa jako obraz Ziemi MAPA: obraz powierzchni Ziemi (ciała niebieskiego) lub jej części przedstawiony na płaszczyźnie, w ściśle określonym zmniejszeniu (skali), w odwzorowaniu kartograficznym (matematycznym
HARMONOGRAM PRAKTYKI Z GEODEZJI I 12 dni
 HARMONOGRAM PRAKTYKI Z GEODEZJI I 12 dni Pomiary sytuacyjne 1. 2. 3. 4. 5. 6. 7. 1. 2. 3. 4. 5. Sprawy organizacyjne Wywiad terenowy i założenie punktów osnowy pomiarowej, wykonanie opisów topograficznych
HARMONOGRAM PRAKTYKI Z GEODEZJI I 12 dni Pomiary sytuacyjne 1. 2. 3. 4. 5. 6. 7. 1. 2. 3. 4. 5. Sprawy organizacyjne Wywiad terenowy i założenie punktów osnowy pomiarowej, wykonanie opisów topograficznych
Laboratorium geodezji
 Laboratorium geodezji Treści kursu: tyczenie odcinków prostych i prostopadłych, pomiar szczegółów sytuacyjnych metodą ortogonalną, Teodolit budowa, sprawdzanie warunków geometrycznych, pomiar kątów poziomych
Laboratorium geodezji Treści kursu: tyczenie odcinków prostych i prostopadłych, pomiar szczegółów sytuacyjnych metodą ortogonalną, Teodolit budowa, sprawdzanie warunków geometrycznych, pomiar kątów poziomych
ASG EUPOS w państwowym systemie odniesień przestrzennych
 ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
Właściciel: PKP Polskie Linie Kolejowe S.A.
 Załącznik do uchwały Nr 718/2016 Zarządu PKP Polskie Linie Kolejowe S.A. z dnia 26 lipca 2016 r. Standard techniczny określający wzór znaku regulacji osi toru oraz sposób zakładania kolejowej osnowy geodezyjnej
Załącznik do uchwały Nr 718/2016 Zarządu PKP Polskie Linie Kolejowe S.A. z dnia 26 lipca 2016 r. Standard techniczny określający wzór znaku regulacji osi toru oraz sposób zakładania kolejowej osnowy geodezyjnej
Geodezja i Kartografia
 Wydział Architektury I rok GP i Kartografia Józef Woźniak Zakład Geodezji i Geoinformatyki Politechniki Wrocławskiej jozef.wozniak@pwr.wroc.pl gis@pwr.wroc.pl Podstawowe informacje Literatura podstawowa:
Wydział Architektury I rok GP i Kartografia Józef Woźniak Zakład Geodezji i Geoinformatyki Politechniki Wrocławskiej jozef.wozniak@pwr.wroc.pl gis@pwr.wroc.pl Podstawowe informacje Literatura podstawowa:
Geodezja fizyczna. Potencjał normalny. Potencjał zakłócajacy. Dr inż. Liliana Bujkiewicz. 8 listopada 2018
 Geodezja fizyczna Potencjał normalny. Potencjał zakłócajacy. Dr inż. Liliana Bujkiewicz 8 listopada 2018 Dr inż. Liliana Bujkiewicz Geodezja fizyczna 8 listopada 2018 1 / 24 Literatura 1 Geodezja współczesna
Geodezja fizyczna Potencjał normalny. Potencjał zakłócajacy. Dr inż. Liliana Bujkiewicz 8 listopada 2018 Dr inż. Liliana Bujkiewicz Geodezja fizyczna 8 listopada 2018 1 / 24 Literatura 1 Geodezja współczesna
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PISEMNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2017 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2017 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów
GEODEZJA WYKŁAD Rachunek współrzędnych
 GEODEZJA WYKŁAD Rachunek współrzędnych Katedra Geodezji im. K. Weigla ul. Poznańska /34 Metody obliczeń geodezyjnych stosowane do obliczenia współrzędnych: - punktów osnów geodezyjnych, - punktów charakterystycznych
GEODEZJA WYKŁAD Rachunek współrzędnych Katedra Geodezji im. K. Weigla ul. Poznańska /34 Metody obliczeń geodezyjnych stosowane do obliczenia współrzędnych: - punktów osnów geodezyjnych, - punktów charakterystycznych
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PISEMNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów
* w przypadku braku numeru PESEL seria i numer paszportu lub innego dokumentu potwierdzającego tożsamość
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PISEMNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Obsługa geodezyjna inwestycji budowlanych Oznaczenie kwalifikacji: B.35 Wersja arkusza:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Obsługa geodezyjna inwestycji budowlanych Oznaczenie kwalifikacji: B.35 Wersja arkusza:
NIWELACJA Pomiary wysokościowe wyznaczenia wysokości punktów poziomów porównawczych. pomiary niwelacyjne.
 NIWELACJA WYKŁAD 5 NIWELACJA Pomiary wysokościowe wykonuje się w celu wyznaczenia wysokości punktów w terenie w stosunku do przyjętych poziomów porównawczych. Najczęściej w tym celu wykonywane są pomiary
NIWELACJA WYKŁAD 5 NIWELACJA Pomiary wysokościowe wykonuje się w celu wyznaczenia wysokości punktów w terenie w stosunku do przyjętych poziomów porównawczych. Najczęściej w tym celu wykonywane są pomiary
Systemy odniesienia pozycji w odbiornikach nawigacyjnych. dr inż. Paweł Zalewski
 Systemy odniesienia pozycji w odbiornikach nawigacyjnych dr inż. Paweł Zalewski Wprowadzenie Terestryczne systemy odniesienia (terrestrial reference systems) lub systemy współrzędnych (coordinate systems)
Systemy odniesienia pozycji w odbiornikach nawigacyjnych dr inż. Paweł Zalewski Wprowadzenie Terestryczne systemy odniesienia (terrestrial reference systems) lub systemy współrzędnych (coordinate systems)
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS
 Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
Piotr Banasik Układy odniesienia i układy współrzędnych stosowane w Polsce : cz. 2. Acta Scientifica Academiae Ostroviensis nr 35-36, 45-51
 Piotr Banasik Układy odniesienia i układy współrzędnych stosowane w Polsce : cz. 2 Acta Scientifica Academiae Ostroviensis nr 35-36, 45-51 2011 Acta Scientifica Academiae Ostroyiensis 45 Piotr Banasik
Piotr Banasik Układy odniesienia i układy współrzędnych stosowane w Polsce : cz. 2 Acta Scientifica Academiae Ostroviensis nr 35-36, 45-51 2011 Acta Scientifica Academiae Ostroyiensis 45 Piotr Banasik
PODZIAŁY NIERUCHOMOŚCI wg standardów
 PODZIAŁY NIERUCHOMOŚCI wg standardów SPIS TREŚCI 30. Wznowienie znaków lub wyznaczenie punktów granicznych... 1 30.4. Protokół, O Którym Mowa W Art. 39 Ust. 4 Ustawy... 1 64. Dokumentacja osnowy... 3 65.
PODZIAŁY NIERUCHOMOŚCI wg standardów SPIS TREŚCI 30. Wznowienie znaków lub wyznaczenie punktów granicznych... 1 30.4. Protokół, O Którym Mowa W Art. 39 Ust. 4 Ustawy... 1 64. Dokumentacja osnowy... 3 65.
SPIS TREŚCI WSTĘP... 8 1. LICZBY RZECZYWISTE 2. WYRAŻENIA ALGEBRAICZNE 3. RÓWNANIA I NIERÓWNOŚCI
 SPIS TREŚCI WSTĘP.................................................................. 8 1. LICZBY RZECZYWISTE Teoria............................................................ 11 Rozgrzewka 1.....................................................
SPIS TREŚCI WSTĘP.................................................................. 8 1. LICZBY RZECZYWISTE Teoria............................................................ 11 Rozgrzewka 1.....................................................
4 Spis treści. Przykład ćwiczenia Trygonometryczne wyznaczanie wysokości obiektów pionowych 165
 Wstęp Podręcznik Przewodnik do ćwiczeń z geodezji II jest przeznaczony głównie dla studentów drugiego roku kierunku geodezja i kartografia Akademii Rolniczej w Krakowie i zawiera materiał z przedmiotu
Wstęp Podręcznik Przewodnik do ćwiczeń z geodezji II jest przeznaczony głównie dla studentów drugiego roku kierunku geodezja i kartografia Akademii Rolniczej w Krakowie i zawiera materiał z przedmiotu
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2013 CZĘŚĆ PISEMNA
 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów Oznaczenie kwalifikacji: B.34 Wersja arkusza: X Układ graficzny CKE 2013 Arkusz zawiera informacje
Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów Oznaczenie kwalifikacji: B.34 Wersja arkusza: X Układ graficzny CKE 2013 Arkusz zawiera informacje
Zadanie egzaminacyjne
 Zadanie egzaminacyjne W celu aktualizacji mapy zasadniczej należy założyć w terenie osnowę pomiarową sytuacyjno-wysokościową jako ciąg dwustronnie nawiązany. Współrzędne punktów nawiązania zamieszczone
Zadanie egzaminacyjne W celu aktualizacji mapy zasadniczej należy założyć w terenie osnowę pomiarową sytuacyjno-wysokościową jako ciąg dwustronnie nawiązany. Współrzędne punktów nawiązania zamieszczone
Geodezja Inżynierska
 Wydział Geoinżynierii, Górnictwa i Geologii Kierunek Górnictwo i Geologia Inżynierska Józef Woźniak Zakład Geodezji i Geoinformatyki Politechniki Wrocławskiej jozef.wozniak@pwr.wroc.pl gis@pwr.wroc.pl
Wydział Geoinżynierii, Górnictwa i Geologii Kierunek Górnictwo i Geologia Inżynierska Józef Woźniak Zakład Geodezji i Geoinformatyki Politechniki Wrocławskiej jozef.wozniak@pwr.wroc.pl gis@pwr.wroc.pl
Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji B.35 Obsługa geodezyjna inwestycji budowlanych
 Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji B.35 Obsługa geodezyjna inwestycji budowlanych W ramach pomiaru kontrolnego pomierzono punkty pośrednie łuku
Przykładowe zadanie egzaminacyjne w części praktycznej egzaminu w modelu d dla kwalifikacji B.35 Obsługa geodezyjna inwestycji budowlanych W ramach pomiaru kontrolnego pomierzono punkty pośrednie łuku
ODWZOROWANIA KARTOGRAFICZNE
 ODWZOROWANIA KARTOGRAFICZNE Określenie położenia Podstawą systemów geoinformacyjnych są mapy cyfrowe, będące pochodną tradycyjnych map analogowych. Układem opisującym położenie danych na powierzchni Ziemi
ODWZOROWANIA KARTOGRAFICZNE Określenie położenia Podstawą systemów geoinformacyjnych są mapy cyfrowe, będące pochodną tradycyjnych map analogowych. Układem opisującym położenie danych na powierzchni Ziemi
GPSz2 WYKŁAD 9 10 STANDARDY TECHNICZNE DOTYCZĄCE OSNÓW POMIAROWYCH ORAZ POMIARÓW SYTUACYJNO-WYSOKOŚCIOWYCH I ICH INTERPRETACJA
 GPSz2 WYKŁAD 9 10 STANDARDY TECHNICZNE DOTYCZĄCE OSNÓW POMIAROWYCH ORAZ POMIARÓW SYTUACYJNO-WYSOKOŚCIOWYCH I ICH INTERPRETACJA 1 STANDARDY DOTYCZACE POMIARÓW SYT. WYS. (W TYM OSNÓW POMIAROWYCH: SYTUACYJNYCH
GPSz2 WYKŁAD 9 10 STANDARDY TECHNICZNE DOTYCZĄCE OSNÓW POMIAROWYCH ORAZ POMIARÓW SYTUACYJNO-WYSOKOŚCIOWYCH I ICH INTERPRETACJA 1 STANDARDY DOTYCZACE POMIARÓW SYT. WYS. (W TYM OSNÓW POMIAROWYCH: SYTUACYJNYCH
Geodezja i systemy GIS - opis przedmiotu
 Geodezja i systemy GIS - opis przedmiotu Informacje ogólne Nazwa przedmiotu Geodezja i systemy GIS Kod przedmiotu W5 Geod._pNadGenYN7SF Wydział Kierunek Wydział Budownictwa, Architektury i Inżynierii Środowiska
Geodezja i systemy GIS - opis przedmiotu Informacje ogólne Nazwa przedmiotu Geodezja i systemy GIS Kod przedmiotu W5 Geod._pNadGenYN7SF Wydział Kierunek Wydział Budownictwa, Architektury i Inżynierii Środowiska
NIWELATORY PRECYZYJNE
 NIWELATORY PRECYZYJNE Zastosowanie: niwelacja precyzyjna osnowa pionowa, badanie przemieszczeń i odkształceń, kontrola i ustawienie maszyn i urządzeń. Parametry niwelatorów precyzyjnych: powiększenie lunety
NIWELATORY PRECYZYJNE Zastosowanie: niwelacja precyzyjna osnowa pionowa, badanie przemieszczeń i odkształceń, kontrola i ustawienie maszyn i urządzeń. Parametry niwelatorów precyzyjnych: powiększenie lunety
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 CZĘŚĆ PISEMNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2016 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2016 Nazwa kwalifikacji: Wykonywanie pomiarów sytuacyjnych i wysokościowych oraz opracowywanie wyników pomiarów
Proste pomiary na pojedynczym zdjęciu lotniczym
 Uniwersytet Rolniczy w Krakowie Wydział Inżynierii Środowiska i Geodezji Katedra Fotogrametrii i Teledetekcji Temat: Proste pomiary na pojedynczym zdjęciu lotniczym Kartometryczność zdjęcia Zdjęcie lotnicze
Uniwersytet Rolniczy w Krakowie Wydział Inżynierii Środowiska i Geodezji Katedra Fotogrametrii i Teledetekcji Temat: Proste pomiary na pojedynczym zdjęciu lotniczym Kartometryczność zdjęcia Zdjęcie lotnicze