Podstawy programowanie systemów wizyjnych InSight firmy Cognex. Środowisku InSight Explorer / Spreadshee
|
|
|
- Bożena Kowalewska
- 6 lat temu
- Przeglądów:
Transkrypt
1 Podstawy programowanie systemów wizyjnych InSight firmy Cognex Środowisku InSight Explorer / Spreadshee


2 Opis zadania: Wykrycie umownych różnic pomiędzy wzorcową płytką testową i płytkami zawierającymi umowne defekty. OK NOK
3 Opis zadania: 1) Kompensacja zmiany położenia obiektu (lokalizacja obiektu lokalizacja wzorca) 2) Histogram - Kontrola obecności i wielkości otworów 3) Blobs - Zliczanie obiektów 4) Find Line, Find Circle - Pomiar głębokości wycięcia 5) FindSegment - Pomiar szerokości szczeliny 6) FindCircleMinMax - Kontrola średnicy i owalności 7) Narzędzia pomiarowe - Pomiar kąt 8) Czytanie kodu Datamatrix 9) OCR 10) Interfejs operatora 11) Komunikacja na przykładzie ProfiNet
 Korzystając z narzędzia Pat Max zlokalizuj")



4 1) Kompensacja zmiany położenia obiektu (lokalizacja obiektu lokalizacja wzorca) Korzystając z narzędzia Pat Max zlokalizuj obiekt (wstępna lokalizacja) Jeżeli to konieczne to do precyzyjniejszego wyznaczenia położenie kątowego lokalizujemy dwa przeciwległe otwory. Środki otworów posłużą jako początek i koniec odcinka, którego położenie kątowe wyznaczamy. Do lokalizacji otworów możemy wykorzystać jedną z kilku opcji. Np. Wzorzec, Blobs bądź znajdź okrąg. W naszym zadaniu zastosujemy FindPatterns (znajdź wzorzec).


5 2) Histogram - Kontrola obecności i wielkości otworów Histogram obrazu cyfrowego jest funkcją przyporządkowującą każdemu stopniowi skali jasności (0-255) ilość zliczonych pikseli obrazu o takiej jasności. Narzędziem wykorzystywanym do badania histogramu w zdefiniowanym regionie jest ExtractHistogram Najważniejsze parametry wyjściowe: HistContrast: Oblicza kontrast w zdefiniowanym regionie. HistCount: Oblicza ilość pikseli w zdefiniowanym regionie których jasność mieści się określonym przedziale HistHead: Określa najmniejszej wartości skali szarości powyżej której ilość zliczonych pikseli jest nie zerowa HistMax: Określa wartości skali szarości, dla której ilość zliczonych pikseli jest największa HistMean: Wylicza średnia wartość skali szarości HistMin: Określa wartości skali szarości, dla której ilość zliczonych pikseli jest najmniejsza HistTail: Określa największą wartości skali szarości poniżej której ilość zliczonych pikseli jest nie zerowa HistThresh: Oblicza optymalny próg binarny.



6 2) Histogram - Kontrola obecności i wielkości otworów Zdefiniowanym analizowanym regionem będzie okrąg. Podłącz w ExtractHistogram / External Region komórkę, w której umieściłeś EditCircle dla każdego z ośmiu otworów. Określamy zakres skali szarości dla otworu. Zakres Ilości zliczonych pikseli funkcją HistCount gdy otwór jest OK Ilość zliczonych pikseli, których jasność mieści się w zdefiniowanym zakresie
.")
7 3) Blobs - Zliczanie obiektów Funkcja ExtractBlobs umożliwia wyodrębnienie obszarów w formie Plam w zdefiniowanym regionie "analiza łączności". Podczas analizy łączności piksele w zdefiniowanym regionie dzielone są na dwie kategorie Plama lub Tło bazując na określonym progu w skali szarości (0-255). Wszystkie piksele poniżej progu traktowane są jako czarne a powyżej jako białe. Dalej piksele o podobnych wartościach są grupowane na podstawie ich koloru (poziomu jasności) i czy stykają się z sąsiadującymi pikselami. Po analizie obrazu nastąpi podzielenie na grupy stykających się pikseli będące blobsami i na piksele będące tłem. Dla określonego blobsa możemy określić szereg jego cech takich jak współrzędne (Row i Col) obszar, obwód bądź wydłużenie. Przykłady blobsów



8 3) Blobs - Zliczanie obiektów Do lokalizacji obiektów wykorzystamy narzędzie ExtractBlobs (Number to Sort proszę podać conajmniej 10) Dalej z zakładki Vision Data Acces wybieramy funkcję GetNFound odwołując się do komórki, w której znajduje się narzędzie ExtractBlobs.

9 Jeżeli musimy wyznaczyć również wysokość i szerokość każdego z elementów to należy spowodować aby kontrolowany obszar był właściwie zorientowany. Do tego celu można posłużyć się filtrem ScaleImage. Korzystając z dodatkowych funkcji z zakładki VisionDataAccess (GetHigh i GetWide) mierzymy wysokość i szerokość Blobsów.)

 Mean(Col0,Col1) Wyznaczamy")


10 4) Find Line, Find Circle - Pomiar głębokości wycięcia Środek odcinka możemy wyznaczyć korzystając z następujących funkcji: Mean(Row0,Row1) Mean(Col0,Col1) Wyznaczamy środek najmniejszego okręgu a następnie krawędź w miejscu położenia wycięcia. Dalej mierzymy odległość od środka okręgu do wyznaczonego odcinka. Najpopularniejsze funkcje geometryczne / pomiarowe


11 5) FindSegment - Pomiar szerokości szczeliny Jednym z najprostszych rozwiązań do pomiaru odległości pomiędzy krawędziami tak jak w naszym przykładzie jest zastosowanie narzędzia FindSegment:



12 6) FindCircleMinMax - Kontrola średnicy i owalności Do pomiaru samego promienia okręgu możemy użyć narzędzia FindCircle, jednak aby wyznaczyć punkt znajdujący się najdalej i najbliżej środka okręgu posłużymy się funkcją FindCircleMinMax. Innym parametrem, który możemy wykorzystać do określenia jak bardzo okrąg jest odkształcony jest odchylenie standardowe (Sdev). 0 to idealny okrąg.

.")


13 7) Narzędzia pomiarowe - Pomiar kąt Przy większych kątach niż 10 st wyznaczamy dwa punkty (np. za pomocą narzędzia FindLine). Szerokość ROI dla każdego z punktów powinna wynosić 1 pkseli wówczas narzędzie zwróci nam jeden punkt. W naszym przypadku musimy wyznaczyć dwa odcinki czyli cztery punkty.

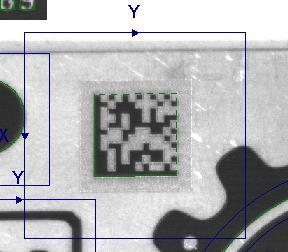

14 8) Czytanie kodu Datamatrix 9) OCR



15 10) Interfejs użytkownika Custom View Przełączenie w tryb wizualizacji. Custom View Setting konfiguracja trybu wizualizacji (wybór obszaru arkusza służącego za interfejs operatora)


16 11) Komunikacja Obsługa we / wy dyskretnych Bufor wejściowy i wyjściowy Komedy powodujące odebranie i wysłanie buforów
Programowanie systemów wizyjnych Cognex. Podstawowe pojęcia oraz środowisko Spreadsheet
 Programowanie systemów wizyjnych Cognex Podstawowe pojęcia oraz środowisko Spreadsheet Plan szkolenia: 1. Wstęp 2. Optyka i oświetlenie 3. Wprowadzenie do programowania systemów wizyjnych 4. Programowanie
Programowanie systemów wizyjnych Cognex Podstawowe pojęcia oraz środowisko Spreadsheet Plan szkolenia: 1. Wstęp 2. Optyka i oświetlenie 3. Wprowadzenie do programowania systemów wizyjnych 4. Programowanie
BIBLIOTEKA PROGRAMU R - BIOPS. Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat
 BIBLIOTEKA PROGRAMU R - BIOPS Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat Biblioteka biops zawiera funkcje do analizy i przetwarzania obrazów. Operacje geometryczne (obrót, przesunięcie,
BIBLIOTEKA PROGRAMU R - BIOPS Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat Biblioteka biops zawiera funkcje do analizy i przetwarzania obrazów. Operacje geometryczne (obrót, przesunięcie,
Laboratorium. Cyfrowe przetwarzanie sygnałów. Ćwiczenie 9. Przetwarzanie sygnałów wizyjnych. Politechnika Świętokrzyska.
 Politechnika Świętokrzyska Laboratorium Cyfrowe przetwarzanie sygnałów Ćwiczenie 9 Przetwarzanie sygnałów wizyjnych. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z funkcjami pozwalającymi na
Politechnika Świętokrzyska Laboratorium Cyfrowe przetwarzanie sygnałów Ćwiczenie 9 Przetwarzanie sygnałów wizyjnych. Cel ćwiczenia Celem ćwiczenia jest zapoznanie studentów z funkcjami pozwalającymi na
System wizyjny OMRON Xpectia FZx
 Ogólna charakterystyka systemu w wersji FZ3 w zależności od modelu można dołączyć od 1 do 4 kamer z interfejsem CameraLink kamery o rozdzielczościach od 300k do 5M pikseli możliwość integracji oświetlacza
Ogólna charakterystyka systemu w wersji FZ3 w zależności od modelu można dołączyć od 1 do 4 kamer z interfejsem CameraLink kamery o rozdzielczościach od 300k do 5M pikseli możliwość integracji oświetlacza
Reprezentacja i analiza obszarów
 Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek ciężkości ułożenie przestrzenne momenty wyższych rzędów promienie max-min centryczność
Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek ciężkości ułożenie przestrzenne momenty wyższych rzędów promienie max-min centryczność
Histogram obrazu, modyfikacje histogramu
 March 15, 2013 Histogram Jeden z graficznych sposobów przedstawiania rozkładu cechy. Składa się z szeregu prostokatów umieszczonych na osi współrzędnych. Prostokaty te sa z jednej strony wyznaczone przez
March 15, 2013 Histogram Jeden z graficznych sposobów przedstawiania rozkładu cechy. Składa się z szeregu prostokatów umieszczonych na osi współrzędnych. Prostokaty te sa z jednej strony wyznaczone przez
Elementy analizy obrazu. W04
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Elementy analizy obrazu. W04 Obszar zainteresowania ROI Obszar zainteresowania Region of Interest (ROI) ROI jest traktowane jako podobraz
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Elementy analizy obrazu. W04 Obszar zainteresowania ROI Obszar zainteresowania Region of Interest (ROI) ROI jest traktowane jako podobraz
Analiza obrazów. Segmentacja i indeksacja obiektów
 Analiza obrazów. Segmentacja i indeksacja obiektów Wykorzystane materiały: R. Tadeusiewicz, P. Korohoda, Komputerowa analiza i przetwarzanie obrazów, Wyd. FPT, Kraków, 1997 Analiza obrazu Analiza obrazu
Analiza obrazów. Segmentacja i indeksacja obiektów Wykorzystane materiały: R. Tadeusiewicz, P. Korohoda, Komputerowa analiza i przetwarzanie obrazów, Wyd. FPT, Kraków, 1997 Analiza obrazu Analiza obrazu
4.2. ELIPSA. 1. W linii statusowej włączamy siatkę i skok, które ułatwią rysowanie:
 4.2. ELIPSA 1. W linii statusowej włączamy siatkę i skok, które ułatwią rysowanie: 2. Rysujemy Elipsę (_Ellipse) zaczynając w dowolnym punkcie, koniec osi definiujemy np. za pomocą współrzędnych względnych
4.2. ELIPSA 1. W linii statusowej włączamy siatkę i skok, które ułatwią rysowanie: 2. Rysujemy Elipsę (_Ellipse) zaczynając w dowolnym punkcie, koniec osi definiujemy np. za pomocą współrzędnych względnych
System mapy numerycznej GEO-MAP
 mgr inż. Waldemar Izdebski GEO-SYSTEM Sp. z o.o. ul. Szaserów 120B m 14 04-349 Warszawa, tel. 610-36-54 System mapy numerycznej GEO-MAP System GEO-MAP jest wygodnym i prostym w obsłudze narzędziem możliwym
mgr inż. Waldemar Izdebski GEO-SYSTEM Sp. z o.o. ul. Szaserów 120B m 14 04-349 Warszawa, tel. 610-36-54 System mapy numerycznej GEO-MAP System GEO-MAP jest wygodnym i prostym w obsłudze narzędziem możliwym
Szacowanie wartości monet na obrazach.
 Marcin Nieściur projekt AiPO Szacowanie wartości monet na obrazach. 1. Wstęp. Celem projektu było stworzenie pluginu do programu ImageJ pozwalającego na szacowanie wartości monet znajdujących się na obrazach
Marcin Nieściur projekt AiPO Szacowanie wartości monet na obrazach. 1. Wstęp. Celem projektu było stworzenie pluginu do programu ImageJ pozwalającego na szacowanie wartości monet znajdujących się na obrazach
Operacje przetwarzania obrazów monochromatycznych
 Operacje przetwarzania obrazów monochromatycznych Obraz pobrany z kamery lub aparatu często wymaga dalszej obróbki. Jej celem jest poprawienie jego jakości lub uzyskaniem na jego podstawie określonych
Operacje przetwarzania obrazów monochromatycznych Obraz pobrany z kamery lub aparatu często wymaga dalszej obróbki. Jej celem jest poprawienie jego jakości lub uzyskaniem na jego podstawie określonych
CZUJNIK WIZYJNY ZFV. E a s y v i s i o n Te a c h & G o. » P rz y j a z ny czujnik ko l o rowy
 CZUJNIK WIZYJNY ZFV E a s y v i s i o n Te a c h & G o» N a s k a l ę k a ż d e g o s y s t e m u, u n i w e r s a l n y w s t o s o w a n i u» P rz y j a z ny czujnik ko l o rowy» I n t u i c y j n y
CZUJNIK WIZYJNY ZFV E a s y v i s i o n Te a c h & G o» N a s k a l ę k a ż d e g o s y s t e m u, u n i w e r s a l n y w s t o s o w a n i u» P rz y j a z ny czujnik ko l o rowy» I n t u i c y j n y
Algorytmy decyzyjne będące alternatywą dla sieci neuronowych
 Algorytmy decyzyjne będące alternatywą dla sieci neuronowych Piotr Dalka Przykładowe algorytmy decyzyjne Sztuczne sieci neuronowe Algorytm k najbliższych sąsiadów Kaskada klasyfikatorów AdaBoost Naiwny
Algorytmy decyzyjne będące alternatywą dla sieci neuronowych Piotr Dalka Przykładowe algorytmy decyzyjne Sztuczne sieci neuronowe Algorytm k najbliższych sąsiadów Kaskada klasyfikatorów AdaBoost Naiwny
Grafika Komputerowa Wykład 2. Przetwarzanie obrazów. mgr inż. Michał Chwesiuk 1/38
 Wykład 2 Przetwarzanie obrazów mgr inż. 1/38 Przetwarzanie obrazów rastrowych Jedna z dziedzin cyfrowego obrazów rastrowych. Celem przetworzenia obrazów rastrowych jest użycie edytujących piksele w celu
Wykład 2 Przetwarzanie obrazów mgr inż. 1/38 Przetwarzanie obrazów rastrowych Jedna z dziedzin cyfrowego obrazów rastrowych. Celem przetworzenia obrazów rastrowych jest użycie edytujących piksele w celu
4.2. ELIPSA. 1. W linii statusowej włączamy siatkę i skok, które ułatwią rysowanie:
 4.2. ELIPSA 1. W linii statusowej włączamy siatkę i skok, które ułatwią rysowanie: 2. Rysujemy Elipsę (_Ellipse) zaczynając w dowolnym punkcie, koniec osi definiujemy np. za pomocą współrzędnych względnych
4.2. ELIPSA 1. W linii statusowej włączamy siatkę i skok, które ułatwią rysowanie: 2. Rysujemy Elipsę (_Ellipse) zaczynając w dowolnym punkcie, koniec osi definiujemy np. za pomocą współrzędnych względnych
POMIARY WIELKOŚCI GEOMETRYCZNYCH Z UŻYCIEM KAMERY CCD
 POMIARY WIELKOŚCI GEOMETRYCZNYCH Z UŻYCIEM KAMERY CCD 1. WPROWADZENIE 1.1. Zastosowanie metod optycznych Metody optyczne pomiarów długości (przemieszczeń liniowych) i kątów (przemieszczeń kątowych) są
POMIARY WIELKOŚCI GEOMETRYCZNYCH Z UŻYCIEM KAMERY CCD 1. WPROWADZENIE 1.1. Zastosowanie metod optycznych Metody optyczne pomiarów długości (przemieszczeń liniowych) i kątów (przemieszczeń kątowych) są
Rozciąganie histogramu
 Rozciąganie histogramu Histogram jest wykresem przedstawiającym częstość występowania pikseli o danej jaskrawości, jasności, barwie. Raster 1 1 3 1 0 2 2 2 3 3 3 1 1 4 0 0 0 3 1 3 4 1 3 3 3 1 3 2 3 5 1
Rozciąganie histogramu Histogram jest wykresem przedstawiającym częstość występowania pikseli o danej jaskrawości, jasności, barwie. Raster 1 1 3 1 0 2 2 2 3 3 3 1 1 4 0 0 0 3 1 3 4 1 3 3 3 1 3 2 3 5 1
i ruchów użytkownika komputera za i pozycjonujący oczy cyberagenta internetowego na oczach i akcjach użytkownika Promotor: dr Adrian Horzyk
 System śledzenia oczu, twarzy i ruchów użytkownika komputera za pośrednictwem kamery internetowej i pozycjonujący oczy cyberagenta internetowego na oczach i akcjach użytkownika Mirosław ł Słysz Promotor:
System śledzenia oczu, twarzy i ruchów użytkownika komputera za pośrednictwem kamery internetowej i pozycjonujący oczy cyberagenta internetowego na oczach i akcjach użytkownika Mirosław ł Słysz Promotor:
Detekcja twarzy w obrazie
 Detekcja twarzy w obrazie Metoda na kanałach RGB 1. Należy utworzyć nowy obrazek o wymiarach analizowanego obrazka. 2. Dla każdego piksela oryginalnego obrazka pobiera się informację o wartości kanałów
Detekcja twarzy w obrazie Metoda na kanałach RGB 1. Należy utworzyć nowy obrazek o wymiarach analizowanego obrazka. 2. Dla każdego piksela oryginalnego obrazka pobiera się informację o wartości kanałów
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 9 AiR III
 1 Na podstawie materiałów autorstwa dra inż. Marka Wnuka. Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania
1 Na podstawie materiałów autorstwa dra inż. Marka Wnuka. Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania
RaiLab Clearance 2010 v
 RaiLab Clearance 2010 v.2.5.37 Podręcznik Kontakt: railab@op.pl v.1.0. 1 Wstęp RaiLab Clearance 2010 to program służący do analizowania położenia skrajni kolejowej w przekroju poprzecznym. Można w nim
RaiLab Clearance 2010 v.2.5.37 Podręcznik Kontakt: railab@op.pl v.1.0. 1 Wstęp RaiLab Clearance 2010 to program służący do analizowania położenia skrajni kolejowej w przekroju poprzecznym. Można w nim
Parametryzacja obrazu na potrzeby algorytmów decyzyjnych
 Parametryzacja obrazu na potrzeby algorytmów decyzyjnych Piotr Dalka Wprowadzenie Z reguły nie stosuje się podawania na wejście algorytmów decyzyjnych bezpośrednio wartości pikseli obrazu Obraz jest przekształcany
Parametryzacja obrazu na potrzeby algorytmów decyzyjnych Piotr Dalka Wprowadzenie Z reguły nie stosuje się podawania na wejście algorytmów decyzyjnych bezpośrednio wartości pikseli obrazu Obraz jest przekształcany
Wykład 4: Statystyki opisowe (część 1)
") Wykład 4: Statystyki opisowe (część 1) Wprowadzenie W przypadku danych mających charakter liczbowy do ich charakterystyki można wykorzystać tak zwane STATYSTYKI OPISOWE. Za pomocą statystyk opisowych można
Wykład 4: Statystyki opisowe (część 1) Wprowadzenie W przypadku danych mających charakter liczbowy do ich charakterystyki można wykorzystać tak zwane STATYSTYKI OPISOWE. Za pomocą statystyk opisowych można
WYKŁAD 12. Analiza obrazu Wyznaczanie parametrów ruchu obiektów
 WYKŁAD 1 Analiza obrazu Wyznaczanie parametrów ruchu obiektów Cel analizy obrazu: przedstawienie każdego z poszczególnych obiektów danego obrazu w postaci wektora cech dla przeprowadzenia procesu rozpoznania
WYKŁAD 1 Analiza obrazu Wyznaczanie parametrów ruchu obiektów Cel analizy obrazu: przedstawienie każdego z poszczególnych obiektów danego obrazu w postaci wektora cech dla przeprowadzenia procesu rozpoznania
Ćwiczenie nr 8 - Modyfikacje części, tworzenie brył złożonych
 Ćwiczenie nr 8 - Modyfikacje części, tworzenie brył złożonych Wprowadzenie Utworzone elementy bryłowe należy traktować jako wstępnie wykonane elementy, które dopiero po dalszej obróbce będą gotowymi częściami
Ćwiczenie nr 8 - Modyfikacje części, tworzenie brył złożonych Wprowadzenie Utworzone elementy bryłowe należy traktować jako wstępnie wykonane elementy, które dopiero po dalszej obróbce będą gotowymi częściami
Czujniki i urządzenia pomiarowe. Czujniki zbliżeniowe (krańcowe), detekcja obecności. Czujniki zbliżeniowe, detekcja obecności
, detekcja obecności. Czujniki zbliżeniowe, detekcja obecności") Czujniki i urządzenia pomiarowe Czujniki zbliżeniowe (krańcowe), detekcja obecności Wyłączniki krańcowe mechaniczne Dane techniczne Napięcia znamionowe 8-250VAC/VDC Prądy ciągłe do 10A Żywotność mechaniczna
Czujniki i urządzenia pomiarowe Czujniki zbliżeniowe (krańcowe), detekcja obecności Wyłączniki krańcowe mechaniczne Dane techniczne Napięcia znamionowe 8-250VAC/VDC Prądy ciągłe do 10A Żywotność mechaniczna
9. OBRAZY i FILTRY BINARNE 9.1 Erozja, dylatacja, zamykanie, otwieranie
 9. OBRAZY i FILTRY BINARNE 9.1 Erozja, dylatacja, zamykanie, otwieranie Obrazy binarne to takie, które mają tylko dwa poziomy szarości: 0 i 1 lub 0 i 255. ImageJ wykorzystuje to drugie rozwiązanie - obrazy
9. OBRAZY i FILTRY BINARNE 9.1 Erozja, dylatacja, zamykanie, otwieranie Obrazy binarne to takie, które mają tylko dwa poziomy szarości: 0 i 1 lub 0 i 255. ImageJ wykorzystuje to drugie rozwiązanie - obrazy
Agnieszka Nowak Brzezińska
 Agnieszka Nowak Brzezińska jeden z algorytmów regresji nieparametrycznej używanych w statystyce do prognozowania wartości pewnej zmiennej losowej. Może również byd używany do klasyfikacji. - Założenia
Agnieszka Nowak Brzezińska jeden z algorytmów regresji nieparametrycznej używanych w statystyce do prognozowania wartości pewnej zmiennej losowej. Może również byd używany do klasyfikacji. - Założenia
WYKŁAD 3. Przykłady zmian w obrazie po zastosowaniu Uniwersalnego Operatora Punktowego
 WYKŁAD 3 Przykłady zmian w obrazie po zastosowaniu Uniwersalnego Operatora Punktowego 1 Przykłady zmian w obrazie po zastosowaniu Uniwersalnego Operatora Punktowego (c.d.) 2 Zestawienie zbiorcze - Regulacje
WYKŁAD 3 Przykłady zmian w obrazie po zastosowaniu Uniwersalnego Operatora Punktowego 1 Przykłady zmian w obrazie po zastosowaniu Uniwersalnego Operatora Punktowego (c.d.) 2 Zestawienie zbiorcze - Regulacje
Założenia funkcjonalności WWT on-line (pre wywiadu technicznego) dla Kanalizacji Kablowej i Słupów OPL:
 dla Kanalizacji Kablowej i Słupów OPL:") Instrukcja dla operatorów Obsługa Wstępnej Weryfikacji Technicznej w POKO Aktualizacja: 22.10.2018r. Założenia funkcjonalności WWT on-line (pre wywiadu technicznego) dla Kanalizacji Kablowej i Słupów OPL:
Instrukcja dla operatorów Obsługa Wstępnej Weryfikacji Technicznej w POKO Aktualizacja: 22.10.2018r. Założenia funkcjonalności WWT on-line (pre wywiadu technicznego) dla Kanalizacji Kablowej i Słupów OPL:
Rys 3-1. Rysunek wałka
 Obiekt 3: Wałek Rys 3-1. Rysunek wałka W tym dokumencie zostanie zaprezentowany schemat działania w celu przygotowania trójwymiarowego rysunku wałka. Poniżej prezentowane są sugestie dotyczące narysowania
Obiekt 3: Wałek Rys 3-1. Rysunek wałka W tym dokumencie zostanie zaprezentowany schemat działania w celu przygotowania trójwymiarowego rysunku wałka. Poniżej prezentowane są sugestie dotyczące narysowania
P R Z E T W A R Z A N I E S Y G N A Ł Ó W B I O M E T R Y C Z N Y C H
 W O J S K O W A A K A D E M I A T E C H N I C Z N A W Y D Z I A Ł E L E K T R O N I K I Drukować dwustronnie P R Z E T W A R Z A N I E S Y G N A Ł Ó W B I O M E T R Y C Z N Y C H Grupa... Data wykonania
W O J S K O W A A K A D E M I A T E C H N I C Z N A W Y D Z I A Ł E L E K T R O N I K I Drukować dwustronnie P R Z E T W A R Z A N I E S Y G N A Ł Ó W B I O M E T R Y C Z N Y C H Grupa... Data wykonania
Rozdział 21 Moduły analogowo - temperaturowe
 Rozdział 21 Moduły analogowo - temperaturowe W odpowiedzi na wymagania użytkowników seria Fs-PLC została wyposażona w analogowy moduł wejściowy z funkcją pomiaru temperatury. Łączy on w sobie funkcje modułu
Rozdział 21 Moduły analogowo - temperaturowe W odpowiedzi na wymagania użytkowników seria Fs-PLC została wyposażona w analogowy moduł wejściowy z funkcją pomiaru temperatury. Łączy on w sobie funkcje modułu
POZYSKIWANIE INFORMACJI Z AUTOCADa: ODLEG _DIST, POLE _AREA, ID (współrzędne), LISTA _LIST, STAN _STATUS, _TIME
, LISTA _LIST, STAN _STATUS, _TIME") POZYSKIWANIE INFORMACJI Z AUTOCADa: ODLEG _DIST, POLE _AREA, ID (współrzędne), LISTA _LIST, STAN _STATUS, _TIME Odległość ODLEG _DIST Użytkownik może szybko wyświetlić poniższe informacje dla dwóch punktów
POZYSKIWANIE INFORMACJI Z AUTOCADa: ODLEG _DIST, POLE _AREA, ID (współrzędne), LISTA _LIST, STAN _STATUS, _TIME Odległość ODLEG _DIST Użytkownik może szybko wyświetlić poniższe informacje dla dwóch punktów
Przekształcenia punktowe
 Przekształcenia punktowe Przekształcenia punktowe realizowane sa w taki sposób, że wymagane operacje wykonuje sie na poszczególnych pojedynczych punktach źródłowego obrazu, otrzymujac w efekcie pojedyncze
Przekształcenia punktowe Przekształcenia punktowe realizowane sa w taki sposób, że wymagane operacje wykonuje sie na poszczególnych pojedynczych punktach źródłowego obrazu, otrzymujac w efekcie pojedyncze
INSTRUKCJA DO ZAJĘĆ LABORATORYJNYCH
 WYDZIAŁ INŻYNIERII ZARZĄDZANIA Katedra Zarządzania Produkcją INSTRUKCJA DO ZAJĘĆ LABORATORYJNYCH Laboratorium z przedmiotu: Temat: Procesy i techniki produkcyjne Obróbka frezarska z wykorzystaniem interpolacji
WYDZIAŁ INŻYNIERII ZARZĄDZANIA Katedra Zarządzania Produkcją INSTRUKCJA DO ZAJĘĆ LABORATORYJNYCH Laboratorium z przedmiotu: Temat: Procesy i techniki produkcyjne Obróbka frezarska z wykorzystaniem interpolacji
KGGiBM GRAFIKA INŻYNIERSKA Rok III, sem. VI, sem IV SN WILiŚ Rok akademicki 2011/2012
 Rysowanie precyzyjne 7 W ćwiczeniu tym pokazane zostaną wybrane techniki bardzo dokładnego rysowania obiektów w programie AutoCAD 2012, między innymi wykorzystanie punktów charakterystycznych. Narysować
Rysowanie precyzyjne 7 W ćwiczeniu tym pokazane zostaną wybrane techniki bardzo dokładnego rysowania obiektów w programie AutoCAD 2012, między innymi wykorzystanie punktów charakterystycznych. Narysować
Księgarnia PWN: Andrzej Jaskulski - AutoCAD 2010/LT Podstawy projektowania parametrycznego i nieparametrycznego
 Księgarnia PWN: Andrzej Jaskulski - AutoCAD 2010/LT2010+. Podstawy projektowania parametrycznego i nieparametrycznego Spis treści 1. Koncepcja i zawartość podręcznika...11 1.1. Zawartość programowa...11
Księgarnia PWN: Andrzej Jaskulski - AutoCAD 2010/LT2010+. Podstawy projektowania parametrycznego i nieparametrycznego Spis treści 1. Koncepcja i zawartość podręcznika...11 1.1. Zawartość programowa...11
Prof. Eugeniusz RATAJCZYK. Makrogemetria Pomiary odchyłek kształtu i połoŝenia
 Prof. Eugeniusz RATAJCZYK Makrogemetria Pomiary odchyłek kształtu i połoŝenia Rodzaje odchyłek - symbole Odchyłki kształtu okrągłości prostoliniowości walcowości płaskości przekroju wzdłuŝnego Odchyłki
Prof. Eugeniusz RATAJCZYK Makrogemetria Pomiary odchyłek kształtu i połoŝenia Rodzaje odchyłek - symbole Odchyłki kształtu okrągłości prostoliniowości walcowości płaskości przekroju wzdłuŝnego Odchyłki
Reprezentacja i analiza obszarów
 Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek cięŝkości ułoŝenie przestrzenne momenty wyŝszych rzędów promienie max-min centryczność
Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek cięŝkości ułoŝenie przestrzenne momenty wyŝszych rzędów promienie max-min centryczność
Przetwarzanie obrazów wykład 4
 Przetwarzanie obrazów wykład 4 Adam Wojciechowski Wykład opracowany na podstawie Komputerowa analiza i przetwarzanie obrazów R. Tadeusiewicz, P. Korohoda Filtry nieliniowe Filtry nieliniowe (kombinowane)
Przetwarzanie obrazów wykład 4 Adam Wojciechowski Wykład opracowany na podstawie Komputerowa analiza i przetwarzanie obrazów R. Tadeusiewicz, P. Korohoda Filtry nieliniowe Filtry nieliniowe (kombinowane)
Analiza danych z nowej aparatury detekcyjnej "Pi of the Sky"
 Uniwersytet Warszawski Wydział Fizyki Bartłomiej Włodarczyk Nr albumu: 306849 Analiza danych z nowej aparatury detekcyjnej "Pi of the Sky" Praca przygotowana w ramach Pracowni Fizycznej II-go stopnia pod
Uniwersytet Warszawski Wydział Fizyki Bartłomiej Włodarczyk Nr albumu: 306849 Analiza danych z nowej aparatury detekcyjnej "Pi of the Sky" Praca przygotowana w ramach Pracowni Fizycznej II-go stopnia pod
Przetwarzanie obrazów wykład 2
 Przetwarzanie obrazów wykład 2 Adam Wojciechowski Wykład opracowany na podstawie Komputerowa analiza i przetwarzanie obrazów R. Tadeusiewicz, P. Korohoda Etapy obróbki pozyskanego obrazu Obróbka wstępna
Przetwarzanie obrazów wykład 2 Adam Wojciechowski Wykład opracowany na podstawie Komputerowa analiza i przetwarzanie obrazów R. Tadeusiewicz, P. Korohoda Etapy obróbki pozyskanego obrazu Obróbka wstępna
Rozpoznawanie obrazów na przykładzie rozpoznawania twarzy
 Rozpoznawanie obrazów na przykładzie rozpoznawania twarzy Wykorzystane materiały: Zadanie W dalszej części prezentacji będzie omawiane zagadnienie rozpoznawania twarzy Problem ten można jednak uogólnić
Rozpoznawanie obrazów na przykładzie rozpoznawania twarzy Wykorzystane materiały: Zadanie W dalszej części prezentacji będzie omawiane zagadnienie rozpoznawania twarzy Problem ten można jednak uogólnić
Plan wykładu. Akcelerator 3D Potok graficzny
 Plan wykładu Akcelerator 3D Potok graficzny Akcelerator 3D W 1996 r. opracowana została specjalna karta rozszerzeń o nazwie marketingowej Voodoo, którą z racji wspomagania procesu generowania grafiki 3D
Plan wykładu Akcelerator 3D Potok graficzny Akcelerator 3D W 1996 r. opracowana została specjalna karta rozszerzeń o nazwie marketingowej Voodoo, którą z racji wspomagania procesu generowania grafiki 3D
Proste metody przetwarzania obrazu
 Operacje na pikselach obrazu (operacje punktowe, bezkontekstowe) Operacje arytmetyczne Dodanie (odjęcie) do obrazu stałej 1 Mnożenie (dzielenie) obrazu przez stałą Operacje dodawania i mnożenia są operacjami
Operacje na pikselach obrazu (operacje punktowe, bezkontekstowe) Operacje arytmetyczne Dodanie (odjęcie) do obrazu stałej 1 Mnożenie (dzielenie) obrazu przez stałą Operacje dodawania i mnożenia są operacjami
Cyfrowe przetwarzanie obrazów. Dr inż. Michał Kruk
 Cyfrowe przetwarzanie obrazów Dr inż. Michał Kruk Przekształcenia morfologiczne Morfologia matematyczna została stworzona w latach sześddziesiątych w Wyższej Szkole Górniczej w Paryżu (Ecole de Mines de
Cyfrowe przetwarzanie obrazów Dr inż. Michał Kruk Przekształcenia morfologiczne Morfologia matematyczna została stworzona w latach sześddziesiątych w Wyższej Szkole Górniczej w Paryżu (Ecole de Mines de
Implementacja filtru Canny ego
 ANALIZA I PRZETWARZANIE OBRAZÓW Implementacja filtru Canny ego Autor: Katarzyna Piotrowicz Kraków,2015-06-11 Spis treści 1. Wstęp... 1 2. Implementacja... 2 3. Przykłady... 3 Porównanie wykrytych krawędzi
ANALIZA I PRZETWARZANIE OBRAZÓW Implementacja filtru Canny ego Autor: Katarzyna Piotrowicz Kraków,2015-06-11 Spis treści 1. Wstęp... 1 2. Implementacja... 2 3. Przykłady... 3 Porównanie wykrytych krawędzi
A. fałszywa dla każdej liczby x.b. prawdziwa dla C. prawdziwa dla D. prawdziwa dla
 Zadanie 1 Liczba jest równa A. B. C. 10 D. Odpowiedź B. Zadanie 2 Liczba jest równa A. 3 B. 2 C. D. Odpowiedź D. Zadanie 3. Liczba jest równa Odpowiedź D. Zadanie 4. Liczba osobników pewnego zagrożonego
Zadanie 1 Liczba jest równa A. B. C. 10 D. Odpowiedź B. Zadanie 2 Liczba jest równa A. 3 B. 2 C. D. Odpowiedź D. Zadanie 3. Liczba jest równa Odpowiedź D. Zadanie 4. Liczba osobników pewnego zagrożonego
Analiza Statystyczna
 Lekcja 5. Strona 1 z 12 Analiza Statystyczna Do analizy statystycznej wykorzystać można wbudowany w MS Excel pakiet Analysis Toolpak. Jest on instalowany w programie Excel jako pakiet dodatkowy. Oznacza
Lekcja 5. Strona 1 z 12 Analiza Statystyczna Do analizy statystycznej wykorzystać można wbudowany w MS Excel pakiet Analysis Toolpak. Jest on instalowany w programie Excel jako pakiet dodatkowy. Oznacza
Spis treści. Programowanie w ImageJ. Zadanie 1. Zadanie 2
 Spis treści 1 Programowanie w ImageJ 1.1 Zadanie 1 1.2 Zadanie 2 1.3 Zadanie 3 1.4 Zadanie 4 1.5 Zadanie 5 Programowanie w ImageJ Zadanie 1 Mamy obraz rtg płuc w formacie jpg, w 8-bitowej skali szarości.
Spis treści 1 Programowanie w ImageJ 1.1 Zadanie 1 1.2 Zadanie 2 1.3 Zadanie 3 1.4 Zadanie 4 1.5 Zadanie 5 Programowanie w ImageJ Zadanie 1 Mamy obraz rtg płuc w formacie jpg, w 8-bitowej skali szarości.
Ćwiczenia z grafiki komputerowej 5 FILTRY. Miłosz Michalski. Institute of Physics Nicolaus Copernicus University. Październik 2015
 Ćwiczenia z grafiki komputerowej 5 FILTRY Miłosz Michalski Institute of Physics Nicolaus Copernicus University Październik 2015 1 / 12 Wykorzystanie warstw Opis zadania Obrazy do ćwiczeń Zadanie ilustruje
Ćwiczenia z grafiki komputerowej 5 FILTRY Miłosz Michalski Institute of Physics Nicolaus Copernicus University Październik 2015 1 / 12 Wykorzystanie warstw Opis zadania Obrazy do ćwiczeń Zadanie ilustruje
Klasyfikatory: k-nn oraz naiwny Bayesa. Agnieszka Nowak Brzezińska Wykład IV
 Klasyfikatory: k-nn oraz naiwny Bayesa Agnieszka Nowak Brzezińska Wykład IV Naiwny klasyfikator Bayesa Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną
Klasyfikatory: k-nn oraz naiwny Bayesa Agnieszka Nowak Brzezińska Wykład IV Naiwny klasyfikator Bayesa Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną
Instrukcja obsługi stomatologicznego fantomu testowego
 Instrukcja obsługi stomatologicznego fantomu testowego Dent/digitest 3 Opracował: mgr inż. Jan Kalita 1 Spis treści. 1. Opis techniczny 3 1.1. Przeznaczenie fantomu. 3 1.2. Budowa fantomu. 4 2. Procedura
Instrukcja obsługi stomatologicznego fantomu testowego Dent/digitest 3 Opracował: mgr inż. Jan Kalita 1 Spis treści. 1. Opis techniczny 3 1.1. Przeznaczenie fantomu. 3 1.2. Budowa fantomu. 4 2. Procedura
Rysowanie precyzyjne. Polecenie:
 7 Rysowanie precyzyjne W ćwiczeniu tym pokazane zostaną różne techniki bardzo dokładnego rysowania obiektów w programie AutoCAD 2010, między innymi wykorzystanie punktów charakterystycznych. Z uwagi na
7 Rysowanie precyzyjne W ćwiczeniu tym pokazane zostaną różne techniki bardzo dokładnego rysowania obiektów w programie AutoCAD 2010, między innymi wykorzystanie punktów charakterystycznych. Z uwagi na
Diagnostyka obrazowa
 Diagnostyka obrazowa Ćwiczenie drugie Podstawowe przekształcenia obrazu 1 Cel ćwiczenia Ćwiczenie ma na celu zapoznanie uczestników kursu Diagnostyka obrazowa z podstawowymi przekształceniami obrazu wykonywanymi
Diagnostyka obrazowa Ćwiczenie drugie Podstawowe przekształcenia obrazu 1 Cel ćwiczenia Ćwiczenie ma na celu zapoznanie uczestników kursu Diagnostyka obrazowa z podstawowymi przekształceniami obrazu wykonywanymi
WYMAGANIA NA OCENĘ 12. Równania kwadratowe Uczeń demonstruje opanowanie umiejętności ogólnych rozwiązując zadania, w których:
 str. 1 / 1. Równania kwadratowe sprawdza, czy liczba jest pierwiastkiem równania, po uporządkowaniu równania określa jego rodzaj (zupełne, niezupełne), rozwiązuje proste uporządkowane równania zupełne
str. 1 / 1. Równania kwadratowe sprawdza, czy liczba jest pierwiastkiem równania, po uporządkowaniu równania określa jego rodzaj (zupełne, niezupełne), rozwiązuje proste uporządkowane równania zupełne
Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia. Mgr inż.
 Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia Mgr inż. Dorota Smorawa Plan prezentacji 1. Wprowadzenie do zagadnienia 2. Opis urządzeń badawczych
Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia Mgr inż. Dorota Smorawa Plan prezentacji 1. Wprowadzenie do zagadnienia 2. Opis urządzeń badawczych
AUTOMATYCZNE ROZPOZNAWANIE PUNKTÓW KONTROLNYCH GŁOWY SŁUŻĄCYCH DO 3D MODELOWANIA JEJ ANATOMII I DYNAMIKI
 AUTOMATYCZNE ROZPOZNAWANIE PUNKTÓW KONTROLNYCH GŁOWY SŁUŻĄCYCH DO 3D MODELOWANIA JEJ ANATOMII I DYNAMIKI Tomasz Huczek Promotor: dr Adrian Horzyk Cel pracy Zasadniczym celem pracy było stworzenie systemu
AUTOMATYCZNE ROZPOZNAWANIE PUNKTÓW KONTROLNYCH GŁOWY SŁUŻĄCYCH DO 3D MODELOWANIA JEJ ANATOMII I DYNAMIKI Tomasz Huczek Promotor: dr Adrian Horzyk Cel pracy Zasadniczym celem pracy było stworzenie systemu
PIXLR EDITOR - Autor: mgr inż. Adam Gierlach
 PIXLR EDITOR - www.pixlr.com Autor: mgr inż. Adam Gierlach 2 OTWIERANIE PLIKU Wybierz OTWÓRZ OBRAZEK Z KOMPUTERA - Pliki / 01_tlo.png 3 ZMIANA WIELKOŚCI OBRAZU 1. w programie wybierz Obrazek / Wielkość
PIXLR EDITOR - www.pixlr.com Autor: mgr inż. Adam Gierlach 2 OTWIERANIE PLIKU Wybierz OTWÓRZ OBRAZEK Z KOMPUTERA - Pliki / 01_tlo.png 3 ZMIANA WIELKOŚCI OBRAZU 1. w programie wybierz Obrazek / Wielkość
A. Arkusz standardowy GM-A1, B1, C1 oraz arkusze przystosowane: GM-A4, GM-A5, GM-A6 1.
 GM Charakterystyka arkuszy egzaminacyjnych A. Arkusz standardowy GM-A1, B1, C1 oraz arkusze przystosowane: GM-A4, GM-A5, GM-A6 1. Zestaw egzaminacyjny z zakresu przedmiotów matematyczno-przyrodniczych
GM Charakterystyka arkuszy egzaminacyjnych A. Arkusz standardowy GM-A1, B1, C1 oraz arkusze przystosowane: GM-A4, GM-A5, GM-A6 1. Zestaw egzaminacyjny z zakresu przedmiotów matematyczno-przyrodniczych
SPIS TREŚCI WSTĘP... 8 1. LICZBY RZECZYWISTE 2. WYRAŻENIA ALGEBRAICZNE 3. RÓWNANIA I NIERÓWNOŚCI
 SPIS TREŚCI WSTĘP.................................................................. 8 1. LICZBY RZECZYWISTE Teoria............................................................ 11 Rozgrzewka 1.....................................................
SPIS TREŚCI WSTĘP.................................................................. 8 1. LICZBY RZECZYWISTE Teoria............................................................ 11 Rozgrzewka 1.....................................................
Ćwiczenie 1 Automatyczna animacja ruchu
 Automatyczna animacja ruchu Celem ćwiczenia jest poznanie procesu tworzenia automatycznej animacji ruchu, która jest podstawą większości projektów we Flashu. Ze względu na swoją wszechstronność omawiana
Automatyczna animacja ruchu Celem ćwiczenia jest poznanie procesu tworzenia automatycznej animacji ruchu, która jest podstawą większości projektów we Flashu. Ze względu na swoją wszechstronność omawiana
Rozkład wyników ogólnopolskich
 Rozkład wyników ogólnopolskich 1 9 8 7 procent uczniów 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 1 11 12 13 14 15 16 17 18 19 2 - wyniki niskie - wyniki średnie - wyniki wysokie liczba punktów Parametry rozkładu wyników
Rozkład wyników ogólnopolskich 1 9 8 7 procent uczniów 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 1 11 12 13 14 15 16 17 18 19 2 - wyniki niskie - wyniki średnie - wyniki wysokie liczba punktów Parametry rozkładu wyników
Agnieszka Nowak Brzezińska Wykład III
 Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 7 AiR III
 1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
Zadania optymalizacyjne
 Zadania optymalizacyjne Zadania optymalizacyjne, to zadania, w których należy obliczyć, jakie warunki muszą być spełnione, aby pewna wielkość osiągała największą lub najmniejszą wartość Żeby żądane warunki
Zadania optymalizacyjne Zadania optymalizacyjne, to zadania, w których należy obliczyć, jakie warunki muszą być spełnione, aby pewna wielkość osiągała największą lub najmniejszą wartość Żeby żądane warunki
PL B1. Układ do lokalizacji elektroakustycznych przetworników pomiarowych w przestrzeni pomieszczenia, zwłaszcza mikrofonów
 PL 224727 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224727 (13) B1 (21) Numer zgłoszenia: 391882 (51) Int.Cl. G01S 5/18 (2006.01) G01S 3/80 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 224727 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224727 (13) B1 (21) Numer zgłoszenia: 391882 (51) Int.Cl. G01S 5/18 (2006.01) G01S 3/80 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Python: JPEG. Zadanie. 1. Wczytanie obrazka
 Python: JPEG Witajcie! Jest to kolejny z serii tutoriali uczący Pythona, a w przyszłości być może nawet Cythona i Numby Jeśli chcesz nauczyć się nowych, zaawansowanych konstrukcji to spróbuj rozwiązać
Python: JPEG Witajcie! Jest to kolejny z serii tutoriali uczący Pythona, a w przyszłości być może nawet Cythona i Numby Jeśli chcesz nauczyć się nowych, zaawansowanych konstrukcji to spróbuj rozwiązać
ANALIZA I INDEKSOWANIE MULTIMEDIÓW (AIM)
") ANALIZA I INDEKSOWANIE MULTIMEDIÓW (AIM) LABORATORIUM 5 - LOKALIZACJA OBIEKTÓW METODĄ HISTOGRAMU KOLORU 1. WYBÓR LOKALIZOWANEGO OBIEKTU Pierwszy etap laboratorium polega na wybraniu lokalizowanego obiektu.
ANALIZA I INDEKSOWANIE MULTIMEDIÓW (AIM) LABORATORIUM 5 - LOKALIZACJA OBIEKTÓW METODĄ HISTOGRAMU KOLORU 1. WYBÓR LOKALIZOWANEGO OBIEKTU Pierwszy etap laboratorium polega na wybraniu lokalizowanego obiektu.
Cel ćwiczenia: Celem ćwiczenia jest nabranie wprawy w rysowaniu kół i okręgów o zadanych rozmiarach.
 Cel ćwiczenia: Celem ćwiczenia jest nabranie wprawy w rysowaniu kół i okręgów o zadanych rozmiarach. Dodatkowo w zadaniu tym, ćwiczone są umiejętności w nadawaniu kolorów wypełnienia i obrysu oraz w używaniu
Cel ćwiczenia: Celem ćwiczenia jest nabranie wprawy w rysowaniu kół i okręgów o zadanych rozmiarach. Dodatkowo w zadaniu tym, ćwiczone są umiejętności w nadawaniu kolorów wypełnienia i obrysu oraz w używaniu
IRONCAD. TriBall IRONCAD Narzędzie pozycjonujące
 IRONCAD IRONCAD 2016 TriBall o Narzędzie pozycjonujące Spis treści 1. Narzędzie TriBall... 2 2. Aktywacja narzędzia TriBall... 2 3. Specyfika narzędzia TriBall... 4 3.1 Kula centralna... 4 3.2 Kule wewnętrzne...
IRONCAD IRONCAD 2016 TriBall o Narzędzie pozycjonujące Spis treści 1. Narzędzie TriBall... 2 2. Aktywacja narzędzia TriBall... 2 3. Specyfika narzędzia TriBall... 4 3.1 Kula centralna... 4 3.2 Kule wewnętrzne...
Operacje morfologiczne w przetwarzaniu obrazu
 Przekształcenia morfologiczne obrazu wywodzą się z morfologii matematycznej działu matematyki opartego na teorii zbiorów Wykorzystuje się do filtracji morfologicznej, wyszukiwania informacji i analizy
Przekształcenia morfologiczne obrazu wywodzą się z morfologii matematycznej działu matematyki opartego na teorii zbiorów Wykorzystuje się do filtracji morfologicznej, wyszukiwania informacji i analizy
POBR Projekt. 1 Cel projektu. 2 Realizacja. 3 Zastosowany algorytm. Celem projektu było rozpoznanie logo firmy Sun Microsystems.
 POBR Projekt Michał Przyłuski 198361 10 czerwca 2008 1 Cel projektu Celem projektu było rozpoznanie logo firmy Sun Microsystems. Z analitycznego punktu widzenia, logo to składa się z 8 podobnych obiektów,
POBR Projekt Michał Przyłuski 198361 10 czerwca 2008 1 Cel projektu Celem projektu było rozpoznanie logo firmy Sun Microsystems. Z analitycznego punktu widzenia, logo to składa się z 8 podobnych obiektów,
Ćwiczenie 12 Różdżka, szybkie zaznaczanie i zakres koloru
 Ćwiczenie 12 Różdżka, szybkie zaznaczanie i zakres koloru Różdżka 1. zaznacza wszystkie piksele o podobnym kolorze w zakresie Tolerancji ustalanej na pasku Opcji, 2. ma zastosowanie dla obszarów o dość
Ćwiczenie 12 Różdżka, szybkie zaznaczanie i zakres koloru Różdżka 1. zaznacza wszystkie piksele o podobnym kolorze w zakresie Tolerancji ustalanej na pasku Opcji, 2. ma zastosowanie dla obszarów o dość
Dodatek 4. Zadanie 1: Liczenie plam słonecznych w różnych dniach. Po uruchomieniu programu SalsaJ otworzy się nam okno widoczne na rysunku 4.1.
 Dodatek 4 W niniejszym załączniku przedstawiona została alternatywna metoda realizowania zadań numer 1, 4 i 6 w ćwiczeniu Słońce dla każdego za pomocą programu SalsaJ, który można ściągnąć ze strony internetowej
Dodatek 4 W niniejszym załączniku przedstawiona została alternatywna metoda realizowania zadań numer 1, 4 i 6 w ćwiczeniu Słońce dla każdego za pomocą programu SalsaJ, który można ściągnąć ze strony internetowej
Topologia działek w MK 2013
 Topologia działek w MK 2013 Podział działki nr 371 w środowisku Microstation 1. Uruchomić program Microstation. 2. Wybrać przestrzeń roboczą MK2013-Rozp.MAiCprzez Użytkownik. 3. Założyć nowy plik roboczy.
Topologia działek w MK 2013 Podział działki nr 371 w środowisku Microstation 1. Uruchomić program Microstation. 2. Wybrać przestrzeń roboczą MK2013-Rozp.MAiCprzez Użytkownik. 3. Założyć nowy plik roboczy.
Podstawy budowy wirtualnych przyrządów pomiarowych
 Podstawy budowy wirtualnych przyrządów pomiarowych Problemy teoretyczne: Pomiar parametrów napięciowych sygnałów za pomocą karty kontrolno pomiarowej oraz programu LabVIEW (prawo Shanona Kotielnikowa).
Podstawy budowy wirtualnych przyrządów pomiarowych Problemy teoretyczne: Pomiar parametrów napięciowych sygnałów za pomocą karty kontrolno pomiarowej oraz programu LabVIEW (prawo Shanona Kotielnikowa).
Projekt docelowej organizacji ruchu na terenie inwestycyjnym w Będzinie dzielnica Warpie. Opracował: inż. Krzysztof Strzeżyk inż.
 Projekt docelowej organizacji ruchu na terenie inwestycyjnym w Będzinie dzielnica Warpie Opracował: inż. Krzysztof Strzeżyk inż. Maciej Babiak Oświęcim Październik 2009 Spis treści: Dane ogólne Temat i
Projekt docelowej organizacji ruchu na terenie inwestycyjnym w Będzinie dzielnica Warpie Opracował: inż. Krzysztof Strzeżyk inż. Maciej Babiak Oświęcim Październik 2009 Spis treści: Dane ogólne Temat i
Praktyczne przykłady wykorzystania GeoGebry podczas lekcji na II etapie edukacyjnym.
 Praktyczne przykłady wykorzystania GeoGebry podczas lekcji na II etapie edukacyjnym. Po uruchomieniu Geogebry (wersja 5.0) Pasek narzędzi Cofnij/przywróć Problem 1: Sprawdź co się stanie, jeśli połączysz
Praktyczne przykłady wykorzystania GeoGebry podczas lekcji na II etapie edukacyjnym. Po uruchomieniu Geogebry (wersja 5.0) Pasek narzędzi Cofnij/przywróć Problem 1: Sprawdź co się stanie, jeśli połączysz
Politechnika Wrocławska, Katedra Inżynierii Biomedycznej Systemy Pomiarowo-Diagnostyczne, laboratorium
 Politechnika Wrocławska, Katedra Inżynierii Biomedycznej Systemy Pomiarowo-Diagnostyczne, laboratorium Ćwiczenie 5 Detektor upadku pacjenta wykorzystujący akcelerometr z interfejsem I 2 C 1. Cel ćwiczenia
Politechnika Wrocławska, Katedra Inżynierii Biomedycznej Systemy Pomiarowo-Diagnostyczne, laboratorium Ćwiczenie 5 Detektor upadku pacjenta wykorzystujący akcelerometr z interfejsem I 2 C 1. Cel ćwiczenia
PRÓBNY ARKUSZ MATURALNY Z MATEMATYKI
 Zadania zamknięte (0- pkt) Zadanie Jeżeli a = log 6 to a jest równe: 4 A. B. C. - Zadanie Warunek x ; 8 jest rozwiązaniem nierówności: A. x + 5 > B. x 5 C. x 5 x + 5 Zadanie Wskaż warunek, który opisuje
Zadania zamknięte (0- pkt) Zadanie Jeżeli a = log 6 to a jest równe: 4 A. B. C. - Zadanie Warunek x ; 8 jest rozwiązaniem nierówności: A. x + 5 > B. x 5 C. x 5 x + 5 Zadanie Wskaż warunek, który opisuje
Rozkład menu narzędzi
 Tylko administrator systemu ma dostęp do wszystkich opcji Narzędzi. Ustawienia urządzenia Ogólne Oszczędzanie energii Inteligentny Uruchamiany pracą Planowany Data i godzina Strefa czasowa (różnica dla
Tylko administrator systemu ma dostęp do wszystkich opcji Narzędzi. Ustawienia urządzenia Ogólne Oszczędzanie energii Inteligentny Uruchamiany pracą Planowany Data i godzina Strefa czasowa (różnica dla
SquezeeX. Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni
 SquezeeX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni SQUEZEEX jest urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni oringów oraz ogólnie rzecz biorąc
SquezeeX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni SQUEZEEX jest urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni oringów oraz ogólnie rzecz biorąc
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Zastosowanie standardu VISA do obsługi interfejsu RS-232C Data wykonania: 03.04.08 Data oddania: 17.04.08 Celem ćwiczenia
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Zastosowanie standardu VISA do obsługi interfejsu RS-232C Data wykonania: 03.04.08 Data oddania: 17.04.08 Celem ćwiczenia
ZASADY ODTWORZENIA PUNKTU REFERENCYJNEGO
 ZASADY ODTWORZENIA PUNKTU REFERENCYJNEGO dla zadania pn.: Usuwanie skutków powodzi w ciągach dróg wojewódzkich DW 966 na terenie Gminy Łapanów z podziałem na zadania: Zadanie 1: Odbudowa DW 966 w m. Łapanów
ZASADY ODTWORZENIA PUNKTU REFERENCYJNEGO dla zadania pn.: Usuwanie skutków powodzi w ciągach dróg wojewódzkich DW 966 na terenie Gminy Łapanów z podziałem na zadania: Zadanie 1: Odbudowa DW 966 w m. Łapanów
Laser FLS 90. Instrukcja obsługi
 Laser FLS 90 pl Instrukcja obsługi L SE R R DI TIO N DO NO T ST R E IN TO BE M L SE R CL S S 2 5 1 2 4 3 3 6 7 B1 B2 1 C1 C2 C3 S1 =S2 = 90 C4 S1 90 S2 D1 D2 D3 D4 D5 D6 E1 S=10m 32 10 E2 C L 1 B E3 L
Laser FLS 90 pl Instrukcja obsługi L SE R R DI TIO N DO NO T ST R E IN TO BE M L SE R CL S S 2 5 1 2 4 3 3 6 7 B1 B2 1 C1 C2 C3 S1 =S2 = 90 C4 S1 90 S2 D1 D2 D3 D4 D5 D6 E1 S=10m 32 10 E2 C L 1 B E3 L
GRAFIKA INŻYNIERSKA INSTRUKCJA PODSTAWOWE KOMENDY AUTOCADA - TRÓJKĄTY
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Zakład Informacji Przestrzennej Inżynieria Środowiska GRAFIKA INŻYNIERSKA INSTRUKCJA PODSTAWOWE KOMENDY AUTOCADA - TRÓJKĄTY Prowadzący
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Zakład Informacji Przestrzennej Inżynieria Środowiska GRAFIKA INŻYNIERSKA INSTRUKCJA PODSTAWOWE KOMENDY AUTOCADA - TRÓJKĄTY Prowadzący
LABORATORIUM ELEKTROTECHNIKI POMIAR PRZESUNIĘCIA FAZOWEGO
 POLITECHNIKA ŚLĄSKA WYDZIAŁ TRANSPORTU KATEDRA LOGISTYKI I TRANSPORTU PRZEMYSŁOWEGO NR 1 POMIAR PRZESUNIĘCIA FAZOWEGO Katowice, październik 5r. CEL ĆWICZENIA Poznanie zjawiska przesunięcia fazowego. ZESTAW
POLITECHNIKA ŚLĄSKA WYDZIAŁ TRANSPORTU KATEDRA LOGISTYKI I TRANSPORTU PRZEMYSŁOWEGO NR 1 POMIAR PRZESUNIĘCIA FAZOWEGO Katowice, październik 5r. CEL ĆWICZENIA Poznanie zjawiska przesunięcia fazowego. ZESTAW
Przykładowe plany zajęć lekcyjnych Design the Future Poland
 Przykładowe plany zajęć lekcyjnych Design the Future Poland 1 Spis treści Plik projektu... 3 Brelok Krok po kroku... 5 Tron dla komórki krok po kroku... 15 Plik projektu... 15 Tron na komórkę... 17 Figury
Przykładowe plany zajęć lekcyjnych Design the Future Poland 1 Spis treści Plik projektu... 3 Brelok Krok po kroku... 5 Tron dla komórki krok po kroku... 15 Plik projektu... 15 Tron na komórkę... 17 Figury
DARMOWA PRZEGLĄDARKA MODELI IFC
 www.bimvision.eu DARMOWA PRZEGLĄDARKA MODELI IFC BIM VISION. OPIS FUNKCJONALNOŚCI PROGRAMU. CZĘŚĆ III. Spis treści ZAKŁADKA WYMIAROWANIE... 1 CASE STUDY... 7 ZAKŁADKA WYMIAROWANIE Pomiary są dokonywane
www.bimvision.eu DARMOWA PRZEGLĄDARKA MODELI IFC BIM VISION. OPIS FUNKCJONALNOŚCI PROGRAMU. CZĘŚĆ III. Spis treści ZAKŁADKA WYMIAROWANIE... 1 CASE STUDY... 7 ZAKŁADKA WYMIAROWANIE Pomiary są dokonywane
Wyposażenie projektorów pomiarowych
 Specyfikacja uzupełniająca Odstępy linii siatek 10X : 0,1 mm 20X : 0,05 mm 50X : 0,02 mm 100X : 0,01 mm Wyposażenie projektorów pomiarowych Grupa 1 Dla projektorów pomiarowych Te standardowe siatki pomiarowe
Specyfikacja uzupełniająca Odstępy linii siatek 10X : 0,1 mm 20X : 0,05 mm 50X : 0,02 mm 100X : 0,01 mm Wyposażenie projektorów pomiarowych Grupa 1 Dla projektorów pomiarowych Te standardowe siatki pomiarowe
Diagnostyka obrazowa
 Diagnostyka obrazowa 1. Cel ćwiczenia Ćwiczenie czwarte Przekształcenia morfologiczne obrazu Ćwiczenie ma na celu zapoznanie uczestników kursu Diagnostyka obrazowa z definicjami operacji morfologicznych
Diagnostyka obrazowa 1. Cel ćwiczenia Ćwiczenie czwarte Przekształcenia morfologiczne obrazu Ćwiczenie ma na celu zapoznanie uczestników kursu Diagnostyka obrazowa z definicjami operacji morfologicznych
Politechnika Warszawska Wydział Mechatroniki Instytut Automatyki i Robotyki
 Politechnika Warszawska Wydział Mechatroniki Instytut Automatyki i Robotyki Ćwiczenie laboratoryjne 2 Temat: Modelowanie powierzchni swobodnych 3D przy użyciu programu Autodesk Inventor Spis treści 1.
Politechnika Warszawska Wydział Mechatroniki Instytut Automatyki i Robotyki Ćwiczenie laboratoryjne 2 Temat: Modelowanie powierzchni swobodnych 3D przy użyciu programu Autodesk Inventor Spis treści 1.
EGZAMIN WSTĘPNY Z MATEMATYKI
 Egzamin wstępny do I Społecznego Liceum Ogólnokształcącego BEDNARSKA Kod zdającego EGZAMIN WSTĘPNY Z MATEMATYKI 1. Przed sobą masz egzamin wstępny z matematyki, który składa się z dwóch części. Osoby,
Egzamin wstępny do I Społecznego Liceum Ogólnokształcącego BEDNARSKA Kod zdającego EGZAMIN WSTĘPNY Z MATEMATYKI 1. Przed sobą masz egzamin wstępny z matematyki, który składa się z dwóch części. Osoby,
Adobe Photoshop Dodatek do lab4 J.Wiślicki, A.Romanowski;
 Spis treści 1. Proste efekty... 2 1.1. Cień...2 1.2. Planeta...5 1.3. Mandarynkowa kostka...8 Grafika rastrowa strona 1 z 9 1. Proste efekty Poniższe ćwiczenia dotyczą prostych (aczkolwiek ciekawych) efektów
Spis treści 1. Proste efekty... 2 1.1. Cień...2 1.2. Planeta...5 1.3. Mandarynkowa kostka...8 Grafika rastrowa strona 1 z 9 1. Proste efekty Poniższe ćwiczenia dotyczą prostych (aczkolwiek ciekawych) efektów
SUKCES W NAUCE MATEMATYKA. klasa IV
 SUKCES W NAUCE SPRAWDZIANY MATEMATYKA klasa IV FIGURY GEOMETRYCZNE: WIELOKĄTY, KOŁA I SKALA Zadanie 1. Która z narysowanych figur jest wielokątem? A. B. C. D. Zadanie 2. Wielokąt o 5 wierzchołkach ma:
SUKCES W NAUCE SPRAWDZIANY MATEMATYKA klasa IV FIGURY GEOMETRYCZNE: WIELOKĄTY, KOŁA I SKALA Zadanie 1. Która z narysowanych figur jest wielokątem? A. B. C. D. Zadanie 2. Wielokąt o 5 wierzchołkach ma:
Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG
 Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG Ergonomiczne, solidne i dokładne mierniki pozwalają na wykonywanie pomiarów grubości materiałów a różne możliwości różnych modeli pozwalają
Ultrasonograficzne mierniki grubości materiału. Seria MTG & PTG Ergonomiczne, solidne i dokładne mierniki pozwalają na wykonywanie pomiarów grubości materiałów a różne możliwości różnych modeli pozwalają