Sztuczne Sieci Neuronowe
|
|
|
- Katarzyna Mróz
- 8 lat temu
- Przeglądów:
Transkrypt
1 Sztuczne Sieci Neuronowe Wykład 4 1. Zdolności uogólniania sieci, weryfikacja procesu uczenia (przypomnienie) 2. Siec wielowarstwowa perceptronowa 3. Algorytmy uczenia sieci metodami propagacji wstecznej bledu. wykład przygotowany na podstawie. S. Osowski, Sieci Neuronowe w ujęciu algorytmicznym, Rozdz. 3, PWNT, Warszawa 1996 S. Osowski, Sieci neuronowe do przetwarzania informacji, Oficyna Wydawnicza PW, Warszawa R. Tadeusiewicz, Sieci Neuronowe, Rozdz. 4. Akademicka Oficyna Wydawnicza RM, Warszawa 1993.
2 Zdolności uogólniania sieci neuronowej Podstawową cechą sieci neuronowej jest jej zdolność do uogólniania, a więc generowania właściwego rozwiązania dla danych, które nie pojawiły się w zestawie danych uczących. Sieć zostaje poddana uczeniu na zbiorze L z bieżącym sprawdzeniem stopnia uczenia na zbiorze V. Zdolność odtworzenia zbioru L przez sieć jest miarą zdolności zapamiętania danych uczących Zdolność do generowania właściwych rozwiązań dla danych należących do zbioru T, na których sieć nigdy nie była trenowana, jest miarą zdolności uogólniania. (Zakłada się że dane tworzące zarówno zbiór L jak i zbiór T są typowymi reprezentantami zbioru danych) 2 T R L V R zbiór danych wejściowych T - zbiór testujący (testing) L - zbiór uczący (learning) V - zbiór danych sprawdzających (validation)
3 Zdolności uogólniania sieci neuronowej Przy stałej liczbie próbek p i wzrastającej wartości miary VCdim błąd uczenia v L (W) maleje monotonicznie, a przedział ufności ε 1 rośnie. W efekcie maksymalny błąd uogólniania osiąga minimum. Zakres VCdim < h opt odpowiada nadmiarowości danych bieżących względem aktualnej wartości VCdim. Zakres VCdim > h opt odpowiada zbyt malej liczbie danych uczących przy aktualnej wartości VCdim. RYSUNEK 3
. RYSUNEK Od pewnego momentu błąd weryfikacji pozostaje stały, natomiast błąd uczenia nadal maleje.")
4 Cykla uczące i błąd veryfikacji W ogólnym przypadku wraz z upływem czasu uczenia błąd uczenia v L (W) (learning) maleje i błąd testowania v V (W) (verification) również maleje (przy ustalonej wartości liczby próbek uczących p oraz miary VCdim). RYSUNEK Od pewnego momentu błąd weryfikacji pozostaje stały, natomiast błąd uczenia nadal maleje. W ostatnich fazach procesu uczenia nieregularności w danych odbiegające od cech charakterystycznych danego procesu zaczynają odgrywać role i powodują wzrost błędu testowania. 4
5 PERCEPTRON raz jeszcze Siecią neuronową, która odegrała historycznie bardzo istotną rolę był PRECEPTRON koncepcja w której wprowadzono nieliniowy element przetwarzający informację. Wprowadzenie nieliniowości było uzasadnione, biologiczne układy faktycznie są nieliniowe. y 1 y 2 y 3 1 Siec perceptronowa jednowarstwowa x 1 x 2 x 3 5
6 PERCEPTRON raz jeszcze Nieliniowy element przyjmowany w sieciach neuronowych może być opisany równaniem. gdzie ϕ(e) jest wybraną funkcją nieliniową a sygnał e odpowiada łącznemu pobudzeniu neuronu. x 1 x 2 ω 1 ω 2 e y Σ ϕ x n ω n Próg Θ 6
7 PERCEPTRON raz jeszcze φ(e) e Ta postać ma szereg wad ale jest łatwa do wyprowadzenia pewnych intuicji. Ponieważ sygnał wyjściowy przyjmuje wartość ( y=1 lub y=0 ), może być rozważany w kategoriach określonej decyzji. Możliwa jest też interpretacja oparta na logice matematycznej, prawda lub fałsz. Percepton może być interpretowany jako układ realizujący pewną funkcję logiczną, a więc automat skończony. 7




8 Własności nieliniowych sieci Przyjmując interpretację progowej funkcji φ(e) jako funkcji rozdzielającej przestrzeń wejściowych sygnałów X na obszar wyróżniony, w którym y=1, oraz na resztę należy stwierdzić, że przy przyjęciu najczęściej rozważanej reguły scalania wejściowych sygnałów w postaci podział ten formułuje granica mająca postać hiperpłaszczyzny. Istotnie, jeśli ϕ(e) = 1 gdy e 0; oraz ϕ(e) = 0 gdy e < 0; to obszar w którym neuron podejmuje decyzje y=1 ogranicza powierzchnia e=0, czyli twór o równaniu Dla n=2 jest to równanie lini prostej, dla n=3 równanie płaszczyzny, a dla n > 3 twór nazywany prawidłowo rozmaitością liniową stopnia n-1, a popularnie traktowany jako płaszczyzna w n-wymiarowej przestrzeni czyli w skrócie hiperpłaszczyzna.. 8
9 Własności nieliniowych sieci Możemy interpretować działanie neuronu budującego perceptron jako dyskryminatora liniowego. Może on zrealizować te wszystkie odwzorowania, w których wystarczy oddzielenie podobszaru przestrzeni X mającego formę otwartej podprzestrzeni ograniczonej hiperpłaszczyzną. Proces uczenia, polegający zawsze na zmianie wartości współczynników ω i, pozwala ustalić graniczną hiperpłaszczyznę w dowolnym położeniu, nie pozwala jednak na zmianę charakteru realizowanego odwzorowania, niezależnie od tego jak długo by się go uczyło. 9
10 Separowalność liniowa Co sie stanie jeżeli nie istnieje taka płaszczyzna? Wtedy zadanie nie może być rozwiązane sieć nie może osiągnąć funkcji celu niezależnie od sposobu jej uczenia. Warunkiem rozwiązania za pomocą perceptronu prostego z jednostkowymi progami jest wymaganie aby dany problem był liniowo separowalny. Funkcja logiczna: AND x 1 x 2 Y (0,1) (0,0) (1,1) (1,0) ω 10
11 Separowalność liniowa Przykład dla którego brak jest liniowej separowalności: funkcja XOR Nie istnieje rozwiązanie dla takiego układu równań reprezentujacy pojedynczy neuron. Funkcja logiczna: XOR x 1 x 2 Y (0,1) (0,0) (1,1) (1,0) ω 11
12 Własności nieliniowych sieci Nierozwiązywalne zadanie: problem XOR Percepton nie może się nauczyć realizacji odwzorowania gdzie operator OR). oznacza alternatywę wyłączającą (exclusive Kilkuwarstwowa sieć: Jednak, czego nie potrafi zrobić jeden neuron, może zrobić kilkuwarstwowa sieć, ponieważ dla nieliniowych neuronów dodanie nowych warstw istotnie poszerza zakres odwzorowań, które sieć potrafi zrealizować. 12
13 Separowalność dla sieci dwuwarstwowej Funkcja XOR: rozwiązuje problem nieliniowej separowalności przez złożenie dwóch separowalności liniowych Suma logiczna w0 w2 Funkcja logiczna: XOR x 1 x 2 Y U 1 =0 U 1 < 0 (0,1) (0,0) Separacja liniowa U 1 2 = 0 U 2 >0 U 1 > 0 (1,1) (1,0) w10 w11 ω U 2 < 0 x1 w1 w12 w20 w21 w22 x2 Neuron w warstwie ukrytej realizuje separowalność liniową, neuron w warstwie wyjściowej wykonuje odpowiednią kombinację 13 liniową, np. sumę logiczną
14 Własności sieci perceptronowych Rozważmy przykładową sieć dwuwarstwową: Pierwsza warstwa, złożona z k neuronów otrzymujących sygnały wejściowe X, dzieli przestrzeń X tych sygnałów za pomocą k oddzielnych hiperpłaszczyzn. y 1 y 2 1 Powstaje w ten sposób układ 2k liniowo rozdzielnych obszarów, które sygnalizowane są przez odpowiednie zestawy 0 i 1 jako wartości sygnałów neuronów pierwszej warstwy. x 1 x 2 x
15 Własności nieliniowych sieci Sieć dwuwarstwowa nie pozwala jeszcze rozpoznać dowolnego podobszaru przestrzeni X, ponieważ łatwo sprawdzić, że obszary sygnalizowane przez neurony drugiej warstwy musza być wypukłe oraz jednospójne (simpleksy). Jest to dość istotne ograniczenie. Aby się od niego uwolnić należy wprowadzić trzecią warstwę neuronów. Dopiero w rezultacie dołączenia trzeciej warstwy możliwe jest utworzenie dowolnych obszarów. 15

16 Schemat Liebmanna Za pomocą nieliniowej sieci neuronowej o przynajmniej trzech warstwach można zrealizować dowolne odwzorowanie, wiążące w całkowicie dowolny sposób wejściowe sygnały X z wyjściowymi sygnałami sieci. 16


17 Formy nieliniowości neuronu Funkcja wiążąca łączne pobudzenie neuronu e z jego sygnałem wyjściowym y Sigmoidalna funkcja wywodzącą się z funkcji logistycznej. 17
18 Formy nieliniowości neuronu Funkcja tangens hiperboliczny: y = tanh ( βe ) który można rozpisać jako Funkcja sinus: chętnie stosowana, można doformułować do przedziału zamkniętego [-1,1]: y = exp ( βe ) - exp ( -βe ) exp ( βe ) + exp ( -βe ) -1 gdy e < -π/2 y = sin( βe ) gdy -π/2 < e < π/2 1 gdy e > π/2 Przy zastosowaniu tej funkcji y (0,1) Zaletą tej funkcji jest prosta formuła określająca pochodną tej funkcji w zależności od jej wartości d ϕ / de = ( 1 + y ) ( 1 y ) Ta postać funkcji jest szczególnie przydatna przy budowie sieci dokonującej transformaty Fouriera wejściowego sygnału. 18
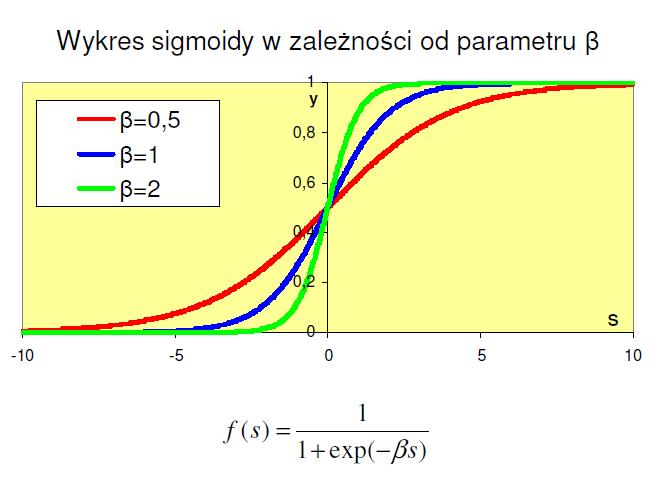
19 Funkcja sigmoidalna 19

20 Funkcja tangs hiperboliczny 20
21 Formy nieliniowości neuronu Niekiedy nieliniowość ma postać nie różniczkowalną, przydatną w praktycznych zastosowaniach, ale kłopotliwą do teoretycznej analizy. Z bardziej znanych postaci można wymienić: Funkcje signum: 1 gdy e > 0 y = 0 gdy e = 0-1 gdy e < 0 Zmodyfikowana funkcje signum: 1 gdy e > 0 y = -1 gdy e 0 Funkcja skoku jednostkowego: 1 gdy e > 0 y = 0 gdy e 0 Funkcja perceptonowa: e gdy e > 0 y = 0 gdy e 0 Funkcje signum: 1 gdy e > 0 y = 0 gdy e = 0-1 gdy e < 0 Funkcja BAM (Bidirectorial Associative Memory) 1 gdy e > 0 y (j+1) = y (j) gdy e = 0-1 gdy e < 0 21 Funkcja BSB (Brain State in a Box) 1 gdy e > 1 y = e gdy 1 > e > -1-1 gdy e < -1 Funkcja SPR (Spatio-Temporal Pattern Recognition) y (j+1) = y (j) + A [ -a y (j) + b e + ] gdzie funkcja ataku A[u] = u gdy u > 0 γu gdy u 0 zapis e + oznacza e + = e gdy e > 0 0 gdy e Powyższe funkcje są inżynierskie : opis który pozwala na wygodną analizę matematyczną, łatwą realizację techniczną (perceptron) lub wygodne modelowanie w formie programu symulacyjnego (signum).

22 Sztuczny neuron sigmoidalny 22



23 Uczenie nieliniowego neuronu Rozważmy problem uczenia nieliniowych sieci neuronowych. Dla uproszczenia analizujemy wyłącznie regułę DELTA w jej podstawowej postaci. Formułę uczenia opieramy na regule minimalizacji funkcjonału błędu średniokwadratowego: N j=1 gdzie N j=1 23



24 Uczenie nieliniowego neuronu Rozkładając funkcjonał błędu na elementy składowe związane z poszczególnymi krokami procesu uczenia gdzie Możemy zgodnie z gradientową strategią procesu uczenia zapisać algorytm zmian czynników wag 24
25 Uczenie nieliniowego neuronu Analogiczny wzór wyprowadzono wcześniej dla sieci ADALINE, jednak treść tego wzoru jest w tym wypadku bogatsza ze względu na nieliniową funkcję φ(e). łatwo możemy obliczyć: 25
26 Uczenie nieliniowego neuronu Problem może być natomiast z wyrażeniem gdzie φ(e) nie zawsze jest różniczkowalne. Ostateczny wzór, na podstawie którego prowadzi się proces uczenia ma postać 26
27 Uczenie nieliniowego neuronu Dość chętnie (bezkrytycznie) stosuje się w rozważaniach funkcje logistyczną która ma łatwą postać pochodnej, Ostateczny wzór dla funkcji logistycznej może być zapisany w prostszej postaci Powyższy algorytm uczenia jest możliwy do bezpośredniego zastosowania jedynie w przypadku sieci jednowarstwowej. 27
28 Uczenie sieci nieliniowej Dla sieci wielowarstwowych, które mają istotnie szersze możliwości przetwarzania informacji niż sieci jednowarstwowe, omawiany poprzednio wzór nie daje się zastosować. Dla warstw wewnętrznych nie ma możliwości bezpośredniego określenia oczekiwanych (wymaganych) wartości sygnałów wejściowych z (j), a tym samych określenia wartości błędu δ (j). Rozważając ciąg mamy do dyspozycji n-wymiarowe wektory wejściowe X oraz k-wymiarowe wektory wyjściowe Z z neuronów terminalnych. 28
29 Uczenie sieci nieliniowej Jeżeli odnotujemy błąd, czyli różnice ( X (j) - Z (j) ), to nie będziemy w stanie ustalić w jaki sposób za pojawienie się błędu odpowiadają neurony warstwy wyjściowej a jaki sposób powstał w elementach wcześniejszych (wewnętrznych) warstw. Noszą one nazwę warstw ukrytych, hidden layers. Przez wiele lat nie było dobrego pomysłu w jaki sposób uczyć warstwy ukryte. 29
30 Uczenie sieci nieliniowej W latach 80-tych zaproponowano algorytm tzw. wstecznej propagacji błędów (backpropagation), polegający na tym że mając wyznaczony błąd δ (m) (j) (j-ty krok uczenia m-tego neuronu) możemy rzutować ten błąd wstecz do wszystkich tych neuronów, których sygnały stanowiły wejścia do m-tego neuronu. y 1 y 2 y 3 δ 1 δ 2 δ 3 30
31 Uczenie sieci nieliniowej Przy założeniu ciągłości funkcji kryterialnej, najskuteczniejszymi metodami uczenia pozostają gradientowe metody optymalizacyjne, w których uaktualnianie wektora wag odbywa się zgodnie ze wzorem gdzie W(k+1) = W(k) + W W = η p(w) η = wspolczynnik uczenia p(w) = kierunek w przestrzeni wielowymiarowej W Uczenie przy zastosowaniu metod gradientowych wymaga wyznaczenia kierunku p(w), czyli wyznaczenia wektora gradientu względem wszystkich wag sieci. - oznacza gradient W = - η (W) 31
32 Uczenie sieci nieliniowej Na samym początku wyznacza się poprawki dla neuronów stanowiących wyjściową warstwę sieci. Dla poszczególnych sygnałów y m (j) istnieją w ciągu uczącym wzorcowe (oczekiwane) wartości z m (j), z którymi można je porównywać, wyznaczając bezpośrednio błąd δ m (j). δ m (j) = ( y m (j) - z m (j) ) ω i (m)(j) = η δ m (j) dφ(e)/de m (j) y i (j) dla funkcji logistycznej wzór ten ulega znacznemu uproszczeniu: ω i (m)(j) = - η (z m (j) y m (j) ) ( 1 - y m (j) ) y i (j) y m (j) 32
33 Uczenie sieci nieliniowej Dla warstwy ukrytej, przez analogię możemy zapisać ω i (m)(j) = η δ m (j) dφ(e)/de m (j) y i (j) ale teraz nie mamy możliwości bezpośrednego wyznaczenia δ m (j). Załóżmy, że rozważany neuron należy do warstwy ukrytej, ale sygnały od niego docierają tylko do warstwy wyjściowej (dla której potrafimy określić δ k (j) ). Wówczas (backpropagation) δ m (j) = Σ ω m (k)(j) δ k (j) ω m (k)(j) waga w neuronie o numerze k, przy jego wejściu m Rzutowane wstecznie błędy przemnażane są przez te same współczynniki, przez które mnożone były sygnały, tyle tylko, że kierunek przesyłania informacji zostaje w tym przypadku odwrócony; zamiast od wejścia do wyjścia przesyła się je od wyjścia kolejno w kierunku wejścia. 33
34 Uczenie sieci nieliniowej Powyższą technikę propagacji wstecznej błędów należy powtarzać dla kolejno coraz głębszej warstwy sieci. Każdy neuron z warstwy ukrytej albo przesyła sygnały do wartości wyjściowych, albo znajduje się w jednej z głębszych warstw, wówczas jego błąd można oszacować z chwilą określenia błędów dla wszystkich neuronów w sieci które są odbiorcą jego sygnałów. Uaktualnianie wag może odbywać się po każdorazowej prezentacji próbki uczącej lub jednorazowo (w sposób skumulowany) po prezentacji wszystkich próbek tworzących cykl uczący. 34
35 Uczenie sieci nieliniowej 1 1 ω 10 (1) ω 10 (2) ω 20 (1) v 1 ω 20 (2) y 1 x 1 ω 1N (1) v 2 ω 1K (2) y 2 x 2 ω 22 (2) y M x N ω KN (1) v K ω MK (2) W sieci feedforward zawsze daje się określić taką kolejność wstecznej propagacji błędów, która pozwala obliczyć błędy dla wszystkich elementów sieci. Uczenie tą metoda jest stosunkowo skuteczne ale powolne. 35
36 Propagacja wsteczna Algorytm podstawowy jest wolnozbieżny w sieci wielowarstwowej, liczne wariacje proponują jak go przyspieszyć. Inne cele modyfikacji dotyczą unikania minimów lokalnych i poprawy zdolności generalizacji. Istnieje wiele parametrów które można rozpatrywać w zakresie usprawnienia ogólnej metody propagacji wstecznej, włącznie z architekturą (liczbą warstw, liczbą jednostek w warstwie), wielkością i naturą zbioru treningowego i regułą modyfikacji wag. Dyskusja dotyczyć będzie przede wszystkim zmian reguł modyfikacji, utrzymując architekturę bez zmian.

37 Metody gradientowe Ponieważ funkcja kryterialna Q = Q(W), zatem poszukiwanie minimum może być dokonywane metodą gradientową. Skupiając uwagę na i-tej składowej wektora W, możemy więc zapisać: 37
38 Funkcje kryterialna Kwadratowa funkcja kryterialna, Nie jest jedyną możliwością. Możemy zastąpić czynnik (y-z) 2 dowolną inną funkcją różniczkowalną, która ma minimum jeżeli jej argumenty są sobie równe, oraz możemy wprowadzić odpowiednią regułę modyfikacji. Bezpośrednie różniczkowanie wskazuje, że tylko wyrażenie bezpośrednio definiujące δ (m) w warstwie wyjściowej zmienia się, a wszystkie pozostałe równania propagacji wstecznej pozostają bez zmian. Do funkcji kryterialnej można też dodać parametry zmieniające jej stromość lub pofałdowanie w procesie uczenia. Spadek gradientu może być bardzo powolny, jeżeli η jest małe, i może mieć duże oscylacje jeżeli η jest duże. 38
39 Składnik momentu w funkcji kryterialnej Najprostsze podejście to dodanie momentu, pomysł polega na nadaniu każdej wadze pewnej bezwładności, czyli momentu, w wyniku czego ma ona skłonność do zmian kierunku średniej zamiast popadania w oscylacje przy każdym małym impulsie. ω pq (j+1) = -η Q/ ω + α ω pq (j) Jeżeli Q/ ω jest prawie stałe to wówczas (j+1) ω pq = - /(1- ) Q/ Przy wartości współczynnika α = 0.9 oznacza to 10-krotny wzrost efektywności wartości wspoółczynnika uczenia, a więc przyspieszenie. 39
40 Algorytm największego spadku Nie jest łatwo wybrać odpowiednie wartości parametrów η i α dla określonego problemu. Ponadto najlepsze wartości w początkowej fazie uczenia mogą nie być dość dobre później. Spadek gradientu może być bardzo powolny, jeżeli η jest małe, i może mieć duże oscylacje jeżeli η jest duże. Ważne jest aby czynnik momentu nie stał się dominujący w procesie uczenia, gdyż prowadziłoby to do niestabilności algorytmu. Zwykle kontroluje się zmiany wartości funkcji celu w procesie uczenia, dopuszczając do jej wzrostu jedynie w ograniczonym zakresie, np. 5%. Jeżeli kolejna iteracja nie spełnia tego warunku to krok jest pomijany. W tym momencie składnik gradientowy odzyskuje dominację ponad składnikiem momentu i proces przebiego zgodnie z kierunkiem minimalizacji wyznaczonym przez wektor gradientu. 40
41 Algorytm zmiennej metryki W metodzie tej wykorzystuje się kwadratowe przybliżenie funkcji kryterialnej Q(W) w sasiedztwie znanego rozwiązania W k. Możemy więc rozwinąć: Q(W+p) = Q(W) + [g(w) T ]p + 1/2p T H(W)p Gdzie g(w) = Q = [ Q/ ω 1, Q/ ω n,..., Q/ ω n ] T jest wektorem gradientu, a symetryczna macierz kwadratowa H(W) jest macierza drugich pochodnych ( 2 Q/( w 1 w 2 ) ). Minimum funkcji wymaga aby dq(w k +p)/dp = 0. Dokonując odpowiedniego różniczkowania otrzymuje się g(w k )+H(W k )p k =0 A więc ostatecznie p k = -[H(W k )] -1 g(w k ) 41
42 Algorytm zmiennej metryki W praktyce wyznaczenie hesjanu H(W) w każdym kroku nie jest stosowane, stosuje się przybliżenie hesjanu G(W) oparte na znajomości wartości gradientu g(w), tak aby G(W k ) (W k W k-1 ) = g(w k ) g (W k-1 ) Oznaczmy: s k = W k W k-1, r k = g(w k ) g(w k-1 ), Macierz odwrotna przyblizonego hesjanu: V k = [G(W k )] -1, V k-1 = [G(W k-1 )] -1 To wówczas proces uaktualniania wartości macierzy V k opisuje się zależnością rekurencyjną V k = V k-1 + (1+ r k T V k-1 r k )/(s k T r k ) s k r k T V k-1 + V k-1 r k s kt /(s k T r k ) 42
43 Algorytm zmiennej metryki Metoda zmiennej metryki charakteryzuje się zbieżnością superliniową. Jest więc znacznie lepsza od liniowo zbieżnej metody największego spadku. Fakt, że hesjan w każdym kroku spełnia warunek dodatniej określoności daje pewność, że spełnienie warunku g(w k ) = 0 odpowiada rozwiazaniu problemu optymalizacji. Metoda ta jest uważana za jedną z najlepszych metod optymalizacji funkcji wielu zmiennych. Jej wadą jest stosunkowo duża złożoność obliczeniowa (konieczność wyznaczenia n 2 elementów hesjanu), a także duże wymagania co do pamięci przy przechowywaniu macierzy hesjanu. Z tego względu stosuje się ją do niezbyt dużych sieci. 43
44 Metoda gradientów sprzężonych W metodzie tej podczas wyznaczania kierunku minimalizacyjnego rezygnuje się z bezpośredniej informacji o hesjanie. Kierunek poszukiwań p k jest konstruowany w taki sposób, aby był ortogonalny oraz sprzężony ze wszystkimi poprzednimi kierunkami p 0, p 1,..., p k-1, tzn. p T G p j = 0 i j Wektor p k ktory spełnia powyższe zalożenia ma postać: p k = - g k + β kj p j Przy czym g k = g(w k ) oznacza aktualną wartość wektora gradientu, a sumowanie dotyczy poprzednich kierunków minimalizacyjnych. Korzystając z warunku ortogonalności oraz uwzględniając sprzeżenie między wektorami, możemy zapisać: p k = -g k + β k-1 p k-1 44
45 Metoda gradientów sprzężonych Współczynnik sprzężenia odgrywa bardzo ważną rolę, kumulując w sobie informację o poprzednich kierunkach poszukiwań. Istnieje wiele odmiennych reguł wyznaczania tego współczynnika. Najbardziej znane z nich to: β k-1 = g k T (g k g k-1 ) / (g T k-1 g k-1 ) β k-1 = g k T (g k g k-1 ) / (-p k-1 g k-1 ) Ze względu na kumulację błędów zaokrąglenia podczas kolejnych cykli obliczeniowych metoda gradientów sprzężonych w praktyce zatraca właściwość ortogonalności między wektorami kierunków minimalizacyjnych. Po n-iteracjach przeprowadza się ponowny start. Metoda wykazuje zbieżność zbliżoną do liniowej, jest mniej skuteczna niż metoda zmiennej metryki, ale zdecydowanie szybsza niż metoda największego spadku. Stosuje się ją jako skuteczny algorytm przy dużej liczbie zmiennych. 45
46 Metody doboru współczynnika uczenia Po określeniu właściwego kierunku p k i wyborze na nim nowego rozwiązania W k+1, należy tak dobrać wartość η k, aby nowy punkt rozwiązania W k+1 = W k + η k p k leżał możliwie blisko minimum funkcji Q(W) na kierunku p k. Właściwy wybór współczynnika η k ma ogromny wpływ na zbieżność algorytmu optymalizacji do minimum funkcji celu. przyjęcie zbyt małej wartości η powoduje niewykorzystanie możliwości zminimalizowania wartości funkcji celu w danym kroku i konieczność jego powtórzenia w następnym. zbyt duży krok powoduje przeskoczenie minimum funkcji i podobny efekt jak poprzednio. Empricznym przepisem stosowanym w sieciach neuronowych jest dobór η < min (1/n i ) gdzie n i oznacza liczbe wejść i-tego neuronu. 46
47 Zestaw pytań do testu Co to znaczy wsteczna propagacja błędów? Podaj znane ci nazwy metod do uczenia wg. techniki propagacji wstecznej Czy metody wstecznej propagacji błędów stosujemy do uczenia sieci liniowych? 47
48 PERCEPTRON raz jeszcze Dygresja: Zależnie od postaci przyjętej funkcji ϕ(e) sygnał y można rozpatrywać jako binarny y { 0, 1 } bipolarny y { -1, 1 } Pozornie różnica jest nieistotna, trywialne przeskalowanie. Może mieć jednak poważne konsekwencje ponieważ punkty należące do zbioru { 0,1} są wierzchołkami jednostkowego hiperszescianu w R n, natomiast punkty należące do zbioru {-1,1} leżą na powierzchni jednostkowej sfery R n. W n-wymiarowej przestrzeni sześcian i sfera różnią się w sposób zasadniczy. Porównajmy objętości: objetość szescianu: V s = a n objetość kuli: V k = π n/2 / (n/2)! r n gdy n jest parzyste V k = 2 n π (n-1)/2 ((n-1)/2)! / n! r n gdy n jest nieparzyste 48
49 PERCEPTRON raz jeszcze Tak więc dla jednostkowego boku a, objętość sześcianu jest stała V s = 1, podczas gdy objętość kuli o jednostkowym promieniu r, V k 0 dla n. Wszystkie punkty sfery są oczywiście jednakowo odległe od jej środka (odległością jest promień sfery), natomiast dla sześcianu, narożniki są odległe od środka o sqrt(n/2) (odległość rośnie). Sześcian coraz bardziej przypomina jeża. W większych wymiarach... należy dość ostrożnie podchodzić do intuicji geometrycznych. Czasami warto jest przejść do układu w ktorym neuron przyjmuje wartość {-1, +1}. Wtedy sieć staje się podobna do układu magnetycznego, w którym momenty magnetyczne atomów mogą mieć dwa przeciwne kierunki. W opisie takich sieci można stosować metody z teorii układów magnetycznych. 49
Sztuczne Sieci Neuronowe
 Sztuczne Sieci Neuronowe Wykład 3 1. Zdolności uogólniania sieci, weryfikacja procesu uczenia 2. Perceptron raz jeszcze. 3. Nieliniowe sieci wielowarstwowe. wykład przygotowany na podstawie. S. Osowski,
Sztuczne Sieci Neuronowe Wykład 3 1. Zdolności uogólniania sieci, weryfikacja procesu uczenia 2. Perceptron raz jeszcze. 3. Nieliniowe sieci wielowarstwowe. wykład przygotowany na podstawie. S. Osowski,
Sieci Neuronowe - Rok III - kierunek IS w IFAiIS UJ 2008/2009. Sieci Neuronowe. Wykład 3
 Sieci Neuronowe - Rok III - kierunek IS w IFAiIS UJ 2008/2009 Sieci Neuronowe Wykład 3 1. Zdolności uogólniania sieci, weryfikacja procesu uczenia 2. Perceptron raz jeszcze. 3. Nieliniowe sieci wielowarstwowe.
Sieci Neuronowe - Rok III - kierunek IS w IFAiIS UJ 2008/2009 Sieci Neuronowe Wykład 3 1. Zdolności uogólniania sieci, weryfikacja procesu uczenia 2. Perceptron raz jeszcze. 3. Nieliniowe sieci wielowarstwowe.
Sieci Neuronowe - Rok III - kierunek IS w IFAiIS UJ 2008/2009. Sieci Neuronowe. Wykład 4 Wariacje na temat propagacji wstecznej Sieci CP
 Sieci Neuronowe - Rok III - kierunek IS w IFAiIS UJ 2008/2009 Sieci Neuronowe Wykład 4 Wariacje na temat propagacji wstecznej Sieci CP wykład przygotowany na podstawie. S. Osowski, Sieci neuronowe w ujęciu
Sieci Neuronowe - Rok III - kierunek IS w IFAiIS UJ 2008/2009 Sieci Neuronowe Wykład 4 Wariacje na temat propagacji wstecznej Sieci CP wykład przygotowany na podstawie. S. Osowski, Sieci neuronowe w ujęciu
Sztuczna Inteligencja Tematy projektów Sieci Neuronowe
 PB, 2009 2010 Sztuczna Inteligencja Tematy projektów Sieci Neuronowe Projekt 1 Stwórz projekt implementujący jednokierunkową sztuczną neuronową złożoną z neuronów typu sigmoidalnego z algorytmem uczenia
PB, 2009 2010 Sztuczna Inteligencja Tematy projektów Sieci Neuronowe Projekt 1 Stwórz projekt implementujący jednokierunkową sztuczną neuronową złożoną z neuronów typu sigmoidalnego z algorytmem uczenia
IMPLEMENTACJA SIECI NEURONOWYCH MLP Z WALIDACJĄ KRZYŻOWĄ
 IMPLEMENTACJA SIECI NEURONOWYCH MLP Z WALIDACJĄ KRZYŻOWĄ Celem ćwiczenia jest zapoznanie się ze sposobem działania sieci neuronowych typu MLP (multi-layer perceptron) uczonych nadzorowaną (z nauczycielem,
IMPLEMENTACJA SIECI NEURONOWYCH MLP Z WALIDACJĄ KRZYŻOWĄ Celem ćwiczenia jest zapoznanie się ze sposobem działania sieci neuronowych typu MLP (multi-layer perceptron) uczonych nadzorowaną (z nauczycielem,
wiedzy Sieci neuronowe
 Metody detekcji uszkodzeń oparte na wiedzy Sieci neuronowe Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 7 Wprowadzenie Okres kształtowania się teorii sztucznych sieci
Metody detekcji uszkodzeń oparte na wiedzy Sieci neuronowe Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 7 Wprowadzenie Okres kształtowania się teorii sztucznych sieci
Uczenie sieci typu MLP
 Uczenie sieci typu MLP Przypomnienie budowa sieci typu MLP Przypomnienie budowy neuronu Neuron ze skokową funkcją aktywacji jest zły!!! Powszechnie stosuje -> modele z sigmoidalną funkcją aktywacji - współczynnik
Uczenie sieci typu MLP Przypomnienie budowa sieci typu MLP Przypomnienie budowy neuronu Neuron ze skokową funkcją aktywacji jest zły!!! Powszechnie stosuje -> modele z sigmoidalną funkcją aktywacji - współczynnik
Widzenie komputerowe
 Widzenie komputerowe Uczenie maszynowe na przykładzie sieci neuronowych (3) źródła informacji: S. Osowski, Sieci neuronowe w ujęciu algorytmicznym, WNT 1996 Zdolność uogólniania sieci neuronowej R oznaczenie
Widzenie komputerowe Uczenie maszynowe na przykładzie sieci neuronowych (3) źródła informacji: S. Osowski, Sieci neuronowe w ujęciu algorytmicznym, WNT 1996 Zdolność uogólniania sieci neuronowej R oznaczenie
Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta
 Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta www.michalbereta.pl Sieci radialne zawsze posiadają jedną warstwę ukrytą, która składa się z neuronów radialnych. Warstwa wyjściowa składa
Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta www.michalbereta.pl Sieci radialne zawsze posiadają jedną warstwę ukrytą, która składa się z neuronów radialnych. Warstwa wyjściowa składa
Podstawy Sztucznej Inteligencji (PSZT)
") Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
Sztuczne sieci neuronowe
 www.math.uni.lodz.pl/ radmat Cel wykładu Celem wykładu jest prezentacja różnych rodzajów sztucznych sieci neuronowych. Biologiczny model neuronu Mózg człowieka składa się z około 10 11 komórek nerwowych,
www.math.uni.lodz.pl/ radmat Cel wykładu Celem wykładu jest prezentacja różnych rodzajów sztucznych sieci neuronowych. Biologiczny model neuronu Mózg człowieka składa się z około 10 11 komórek nerwowych,
1. Logika, funkcje logiczne, preceptron.
 Sieci neuronowe 1. Logika, funkcje logiczne, preceptron. 1. (Logika) Udowodnij prawa de Morgana, prawo pochłaniania p (p q), prawo wyłączonego środka p p oraz prawo sprzeczności (p p). 2. Wyraź funkcję
Sieci neuronowe 1. Logika, funkcje logiczne, preceptron. 1. (Logika) Udowodnij prawa de Morgana, prawo pochłaniania p (p q), prawo wyłączonego środka p p oraz prawo sprzeczności (p p). 2. Wyraź funkcję
KADD Minimalizacja funkcji
 Minimalizacja funkcji n-wymiarowych Forma kwadratowa w n wymiarach Procedury minimalizacji Minimalizacja wzdłuż prostej w n-wymiarowej przestrzeni Metody minimalizacji wzdłuż osi współrzędnych wzdłuż kierunków
Minimalizacja funkcji n-wymiarowych Forma kwadratowa w n wymiarach Procedury minimalizacji Minimalizacja wzdłuż prostej w n-wymiarowej przestrzeni Metody minimalizacji wzdłuż osi współrzędnych wzdłuż kierunków
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Wstęp do teorii sztucznej inteligencji Wykład III. Modele sieci neuronowych.
 Wstęp do teorii sztucznej inteligencji Wykład III Modele sieci neuronowych. 1 Perceptron model najprostzszy przypomnienie Schemat neuronu opracowany przez McCullocha i Pittsa w 1943 roku. Przykład funkcji
Wstęp do teorii sztucznej inteligencji Wykład III Modele sieci neuronowych. 1 Perceptron model najprostzszy przypomnienie Schemat neuronu opracowany przez McCullocha i Pittsa w 1943 roku. Przykład funkcji
8. Neuron z ciągłą funkcją aktywacji.
 8. Neuron z ciągłą funkcją aktywacji. W tym ćwiczeniu zapoznamy się z modelem sztucznego neuronu oraz przykładem jego wykorzystania do rozwiązywanie prostego zadania klasyfikacji. Neuron biologiczny i
8. Neuron z ciągłą funkcją aktywacji. W tym ćwiczeniu zapoznamy się z modelem sztucznego neuronu oraz przykładem jego wykorzystania do rozwiązywanie prostego zadania klasyfikacji. Neuron biologiczny i
Elementy inteligencji obliczeniowej
 Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Zagadnienia optymalizacji i aproksymacji. Sieci neuronowe.
 Zagadnienia optymalizacji i aproksymacji. Sieci neuronowe. zajecia.jakubw.pl/nai Literatura: S. Osowski, Sieci neuronowe w ujęciu algorytmicznym. WNT, Warszawa 997. PODSTAWOWE ZAGADNIENIA TECHNICZNE AI
Zagadnienia optymalizacji i aproksymacji. Sieci neuronowe. zajecia.jakubw.pl/nai Literatura: S. Osowski, Sieci neuronowe w ujęciu algorytmicznym. WNT, Warszawa 997. PODSTAWOWE ZAGADNIENIA TECHNICZNE AI
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
Inteligentne systemy decyzyjne: Uczenie maszynowe sztuczne sieci neuronowe
 Inteligentne systemy decyzyjne: Uczenie maszynowe sztuczne sieci neuronowe Trening jednokierunkowych sieci neuronowych wykład 2. dr inż. PawełŻwan Katedra Systemów Multimedialnych Politechnika Gdańska
Inteligentne systemy decyzyjne: Uczenie maszynowe sztuczne sieci neuronowe Trening jednokierunkowych sieci neuronowych wykład 2. dr inż. PawełŻwan Katedra Systemów Multimedialnych Politechnika Gdańska
WYKŁAD 9 METODY ZMIENNEJ METRYKI
 WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
Wstęp do sztucznych sieci neuronowych
 Wstęp do sztucznych sieci neuronowych Michał Garbowski Zachodniopomorski Uniwersytet Technologiczny w Szczecinie Wydział Informatyki 15 grudnia 2011 Plan wykładu I 1 Wprowadzenie Inspiracja biologiczna
Wstęp do sztucznych sieci neuronowych Michał Garbowski Zachodniopomorski Uniwersytet Technologiczny w Szczecinie Wydział Informatyki 15 grudnia 2011 Plan wykładu I 1 Wprowadzenie Inspiracja biologiczna
KADD Minimalizacja funkcji
 Minimalizacja funkcji Poszukiwanie minimum funkcji Foma kwadratowa Metody przybliżania minimum minimalizacja Minimalizacja w n wymiarach Metody poszukiwania minimum Otaczanie minimum Podział obszaru zawierającego
Minimalizacja funkcji Poszukiwanie minimum funkcji Foma kwadratowa Metody przybliżania minimum minimalizacja Minimalizacja w n wymiarach Metody poszukiwania minimum Otaczanie minimum Podział obszaru zawierającego
2.4. Algorytmy uczenia sieci neuronowych
 2.4. Algorytmy uczenia sieci neuronowych Prosta struktura sieci jednokierunkowych sprawia, że są najchętniej stosowane. Ponadto metody uczenia ich należą również do popularnych i łatwych w realizacji.
2.4. Algorytmy uczenia sieci neuronowych Prosta struktura sieci jednokierunkowych sprawia, że są najchętniej stosowane. Ponadto metody uczenia ich należą również do popularnych i łatwych w realizacji.
Metody Sztucznej Inteligencji II
 17 marca 2013 Neuron biologiczny Neuron Jest podstawowym budulcem układu nerwowego. Jest komórką, która jest w stanie odbierać i przekazywać sygnały elektryczne. Neuron działanie Jeżeli wartość sygnału
17 marca 2013 Neuron biologiczny Neuron Jest podstawowym budulcem układu nerwowego. Jest komórką, która jest w stanie odbierać i przekazywać sygnały elektryczne. Neuron działanie Jeżeli wartość sygnału
1. Historia 2. Podstawy neurobiologii 3. Definicje i inne kłamstwa 4. Sztuczny neuron i zasady działania SSN. Agenda
 Sieci neuropodobne 1. Historia 2. Podstawy neurobiologii 3. Definicje i inne kłamstwa 4. Sztuczny neuron i zasady działania SSN Agenda Trochę neurobiologii System nerwowy w organizmach żywych tworzą trzy
Sieci neuropodobne 1. Historia 2. Podstawy neurobiologii 3. Definicje i inne kłamstwa 4. Sztuczny neuron i zasady działania SSN Agenda Trochę neurobiologii System nerwowy w organizmach żywych tworzą trzy
Literatura. Sztuczne sieci neuronowe. Przepływ informacji w systemie nerwowym. Budowa i działanie mózgu
 Literatura Wykład : Wprowadzenie do sztucznych sieci neuronowych Małgorzata Krętowska Wydział Informatyki Politechnika Białostocka Tadeusiewicz R: Sieci neuronowe, Akademicka Oficyna Wydawnicza RM, Warszawa
Literatura Wykład : Wprowadzenie do sztucznych sieci neuronowych Małgorzata Krętowska Wydział Informatyki Politechnika Białostocka Tadeusiewicz R: Sieci neuronowe, Akademicka Oficyna Wydawnicza RM, Warszawa
Zastosowania sieci neuronowych
 Zastosowania sieci neuronowych aproksymacja LABORKA Piotr Ciskowski zadanie 1. aproksymacja funkcji odległość punktów źródło: Żurada i in. Sztuczne sieci neuronowe, przykład 4.4, str. 137 Naucz sieć taką
Zastosowania sieci neuronowych aproksymacja LABORKA Piotr Ciskowski zadanie 1. aproksymacja funkcji odległość punktów źródło: Żurada i in. Sztuczne sieci neuronowe, przykład 4.4, str. 137 Naucz sieć taką
Temat: Sieci neuronowe oraz technologia CUDA
 Elbląg, 27.03.2010 Temat: Sieci neuronowe oraz technologia CUDA Przygotował: Mateusz Górny VIII semestr ASiSK Wstęp Sieci neuronowe są to specyficzne struktury danych odzwierciedlające sieć neuronów w
Elbląg, 27.03.2010 Temat: Sieci neuronowe oraz technologia CUDA Przygotował: Mateusz Górny VIII semestr ASiSK Wstęp Sieci neuronowe są to specyficzne struktury danych odzwierciedlające sieć neuronów w
Wstęp do sieci neuronowych, wykład 03 Warstwy RBF, jednostka Adaline.
 Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka Adaline. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 211-1-18 1 Pomysł Przykłady Zastosowanie 2
Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka Adaline. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 211-1-18 1 Pomysł Przykłady Zastosowanie 2
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Wstęp do teorii sztucznej inteligencji Wykład II. Uczenie sztucznych neuronów.
 Wstęp do teorii sztucznej inteligencji Wykład II Uczenie sztucznych neuronów. 1 - powtórzyć o klasyfikacji: Sieci liniowe I nieliniowe Sieci rekurencyjne Uczenie z nauczycielem lub bez Jednowarstwowe I
Wstęp do teorii sztucznej inteligencji Wykład II Uczenie sztucznych neuronów. 1 - powtórzyć o klasyfikacji: Sieci liniowe I nieliniowe Sieci rekurencyjne Uczenie z nauczycielem lub bez Jednowarstwowe I
ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ
 ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie minimalizacji bez ograniczeń f(ˆx) = min x R nf(x) f : R n R funkcja ograniczona z dołu Algorytm rozwiazywania Rekurencyjny
ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie minimalizacji bez ograniczeń f(ˆx) = min x R nf(x) f : R n R funkcja ograniczona z dołu Algorytm rozwiazywania Rekurencyjny
METODY INŻYNIERII WIEDZY
 METODY INŻYNIERII WIEDZY SZTUCZNE SIECI NEURONOWE MLP Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Katedra Automatyki i Inżynierii
METODY INŻYNIERII WIEDZY SZTUCZNE SIECI NEURONOWE MLP Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Katedra Automatyki i Inżynierii
Zastosowania sieci neuronowych
 Zastosowania sieci neuronowych klasyfikacja LABORKA Piotr Ciskowski zadanie 1. klasyfikacja zwierząt sieć jednowarstwowa żródło: Tadeusiewicz. Odkrywanie własności sieci neuronowych, str. 159 Przykład
Zastosowania sieci neuronowych klasyfikacja LABORKA Piotr Ciskowski zadanie 1. klasyfikacja zwierząt sieć jednowarstwowa żródło: Tadeusiewicz. Odkrywanie własności sieci neuronowych, str. 159 Przykład
ROZWIĄZYWANIE RÓWNAŃ NIELINIOWYCH
 Transport, studia I stopnia Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym
Transport, studia I stopnia Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym
5. Rozwiązywanie układów równań liniowych
 5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
Aproksymacja funkcji a regresja symboliczna
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Lekcja 5: Sieć Kohonena i sieć ART
 Lekcja 5: Sieć Kohonena i sieć ART S. Hoa Nguyen 1 Materiał Sieci Kohonena (Sieć samo-organizująca) Rysunek 1: Sieć Kohonena Charakterystyka sieci: Jednowarstwowa jednokierunkowa sieć. Na ogół neurony
Lekcja 5: Sieć Kohonena i sieć ART S. Hoa Nguyen 1 Materiał Sieci Kohonena (Sieć samo-organizująca) Rysunek 1: Sieć Kohonena Charakterystyka sieci: Jednowarstwowa jednokierunkowa sieć. Na ogół neurony
Metody numeryczne I Równania nieliniowe
 Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
BIOCYBERNETYKA SIECI NEURONOWE. Akademia Górniczo-Hutnicza. Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej.
 Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej BIOCYBERNETYKA Adrian Horzyk SIECI NEURONOWE www.agh.edu.pl Mózg inspiruje nas od wieków Co takiego
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej BIOCYBERNETYKA Adrian Horzyk SIECI NEURONOWE www.agh.edu.pl Mózg inspiruje nas od wieków Co takiego
METODY INTELIGENCJI OBLICZENIOWEJ wykład 5
 METODY INTELIGENCJI OBLICZENIOWEJ wykład 5 1 2 SZTUCZNE SIECI NEURONOWE cd 3 UCZENIE PERCEPTRONU: Pojedynczy neuron (lub 1 warstwa neuronów) typu percep- tronowego jest w stanie rozdzielić przestrzeń obsza-
METODY INTELIGENCJI OBLICZENIOWEJ wykład 5 1 2 SZTUCZNE SIECI NEURONOWE cd 3 UCZENIE PERCEPTRONU: Pojedynczy neuron (lub 1 warstwa neuronów) typu percep- tronowego jest w stanie rozdzielić przestrzeń obsza-
Dystrybucje, wiadomości wstępne (I)
") Temat 8 Dystrybucje, wiadomości wstępne (I) Wielkości fizyczne opisujemy najczęściej przyporządkowując im funkcje (np. zależne od czasu). Inną drogą opisu tych wielkości jest przyporządkowanie im funkcjonałów
Temat 8 Dystrybucje, wiadomości wstępne (I) Wielkości fizyczne opisujemy najczęściej przyporządkowując im funkcje (np. zależne od czasu). Inną drogą opisu tych wielkości jest przyporządkowanie im funkcjonałów
wiedzy Sieci neuronowe (c.d.)
") Metody detekci uszkodzeń oparte na wiedzy Sieci neuronowe (c.d.) Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 8 Metody detekci uszkodzeń oparte na wiedzy Wprowadzenie
Metody detekci uszkodzeń oparte na wiedzy Sieci neuronowe (c.d.) Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 8 Metody detekci uszkodzeń oparte na wiedzy Wprowadzenie
synaptycznych wszystko to waży 1.5 kg i zajmuje objętość około 1.5 litra. A zużywa mniej energii niż lampka nocna.
 Sieci neuronowe model konekcjonistyczny Plan wykładu Mózg ludzki a komputer Modele konekcjonistycze Perceptron Sieć neuronowa Uczenie sieci Sieci Hopfielda Mózg ludzki a komputer Twój mózg to 00 000 000
Sieci neuronowe model konekcjonistyczny Plan wykładu Mózg ludzki a komputer Modele konekcjonistycze Perceptron Sieć neuronowa Uczenie sieci Sieci Hopfielda Mózg ludzki a komputer Twój mózg to 00 000 000
Optymalizacja systemów
 Optymalizacja systemów Laboratorium - problem detekcji twarzy autorzy: A. Gonczarek, J.M. Tomczak, S. Zaręba, P. Klukowski Cel zadania Celem zadania jest zapoznanie się z gradientowymi algorytmami optymalizacji
Optymalizacja systemów Laboratorium - problem detekcji twarzy autorzy: A. Gonczarek, J.M. Tomczak, S. Zaręba, P. Klukowski Cel zadania Celem zadania jest zapoznanie się z gradientowymi algorytmami optymalizacji
Podstawy sztucznej inteligencji
 wykład 5 Sztuczne sieci neuronowe (SSN) 8 grudnia 2011 Plan wykładu 1 Biologiczne wzorce sztucznej sieci neuronowej 2 3 4 Neuron biologiczny Neuron Jest podstawowym budulcem układu nerwowego. Jest komórką,
wykład 5 Sztuczne sieci neuronowe (SSN) 8 grudnia 2011 Plan wykładu 1 Biologiczne wzorce sztucznej sieci neuronowej 2 3 4 Neuron biologiczny Neuron Jest podstawowym budulcem układu nerwowego. Jest komórką,
WYKORZYSTANIE SIECI NEURONOWEJ DO BADANIA WPŁYWU WYDOBYCIA NA SEJSMICZNOŚĆ W KOPALNIACH WĘGLA KAMIENNEGO. Stanisław Kowalik (Poland, Gliwice)
") WYKORZYSTANIE SIECI NEURONOWEJ DO BADANIA WPŁYWU WYDOBYCIA NA SEJSMICZNOŚĆ W KOPALNIACH WĘGLA KAMIENNEGO Stanisław Kowalik (Poland, Gliwice) 1. Wprowadzenie Wstrząsy podziemne i tąpania występujące w kopalniach
WYKORZYSTANIE SIECI NEURONOWEJ DO BADANIA WPŁYWU WYDOBYCIA NA SEJSMICZNOŚĆ W KOPALNIACH WĘGLA KAMIENNEGO Stanisław Kowalik (Poland, Gliwice) 1. Wprowadzenie Wstrząsy podziemne i tąpania występujące w kopalniach
Temat: Sztuczne Sieci Neuronowe. Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE
 Temat: Sztuczne Sieci Neuronowe Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie Sztuczne sieci neuronowe
Temat: Sztuczne Sieci Neuronowe Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie Sztuczne sieci neuronowe
Sztuczne sieci neuronowe
 Wydział Zarządzania AGH Katedra Informatyki Stosowanej Sztuczne sieci neuronowe Sztuczne sieci neuronowe Wprowadzenie Trochę historii Podstawy działania Funkcja aktywacji Typy sieci 2 Wprowadzenie Zainteresowanie
Wydział Zarządzania AGH Katedra Informatyki Stosowanej Sztuczne sieci neuronowe Sztuczne sieci neuronowe Wprowadzenie Trochę historii Podstawy działania Funkcja aktywacji Typy sieci 2 Wprowadzenie Zainteresowanie
Sieci neuronowe do przetwarzania informacji / Stanisław Osowski. wyd. 3. Warszawa, Spis treści
 Sieci neuronowe do przetwarzania informacji / Stanisław Osowski. wyd. 3. Warszawa, 2013 Spis treści Przedmowa 7 1. Wstęp 9 1.1. Podstawy biologiczne działania neuronu 9 1.2. Pierwsze modele sieci neuronowej
Sieci neuronowe do przetwarzania informacji / Stanisław Osowski. wyd. 3. Warszawa, 2013 Spis treści Przedmowa 7 1. Wstęp 9 1.1. Podstawy biologiczne działania neuronu 9 1.2. Pierwsze modele sieci neuronowej
Uczenie sieci neuronowych i bayesowskich
 Wstęp do metod sztucznej inteligencji www.mat.uni.torun.pl/~piersaj 2009-01-22 Co to jest neuron? Komputer, a mózg komputer mózg Jednostki obliczeniowe 1-4 CPU 10 11 neuronów Pojemność 10 9 b RAM, 10 10
Wstęp do metod sztucznej inteligencji www.mat.uni.torun.pl/~piersaj 2009-01-22 Co to jest neuron? Komputer, a mózg komputer mózg Jednostki obliczeniowe 1-4 CPU 10 11 neuronów Pojemność 10 9 b RAM, 10 10
Sztuczna inteligencja
 Sztuczna inteligencja Wykład 7. Architektury sztucznych sieci neuronowych. Metody uczenia sieci. źródła informacji: S. Osowski, Sieci neuronowe w ujęciu algorytmicznym, WNT 1996 Podstawowe architektury
Sztuczna inteligencja Wykład 7. Architektury sztucznych sieci neuronowych. Metody uczenia sieci. źródła informacji: S. Osowski, Sieci neuronowe w ujęciu algorytmicznym, WNT 1996 Podstawowe architektury
Przykładowe funkcje przejścia używane przy budowie sztucznych neuronów
 Przykładowe funkcje przejścia używane przy budowie sztucznych neuronów Funkcja Wzór funkcji Wzór pochodnej Sigmoida f(s)=1/(1+e -(β*s) ) f (s)=β*(1- f(s))* f(s) Funkcje przejścia neuronu powinno się rozpatrywać
Przykładowe funkcje przejścia używane przy budowie sztucznych neuronów Funkcja Wzór funkcji Wzór pochodnej Sigmoida f(s)=1/(1+e -(β*s) ) f (s)=β*(1- f(s))* f(s) Funkcje przejścia neuronu powinno się rozpatrywać
w analizie wyników badań eksperymentalnych, w problemach modelowania zjawisk fizycznych, w analizie obserwacji statystycznych.
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Inteligentne systemy przeciw atakom sieciowym
 Inteligentne systemy przeciw atakom sieciowym wykład Sztuczne sieci neuronowe (SSN) Joanna Kołodziejczyk 2016 Joanna Kołodziejczyk Inteligentne systemy przeciw atakom sieciowym 2016 1 / 36 Biologiczne
Inteligentne systemy przeciw atakom sieciowym wykład Sztuczne sieci neuronowe (SSN) Joanna Kołodziejczyk 2016 Joanna Kołodziejczyk Inteligentne systemy przeciw atakom sieciowym 2016 1 / 36 Biologiczne
Optymalizacja ciągła
 Optymalizacja ciągła 4. Metody kierunków poprawy (metoda spadku wzdłuż gradientu) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 21.03.2019 1 / 41 Plan wykładu Minimalizacja
Optymalizacja ciągła 4. Metody kierunków poprawy (metoda spadku wzdłuż gradientu) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 21.03.2019 1 / 41 Plan wykładu Minimalizacja
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
Wstęp do sieci neuronowych, wykład 6 Wsteczna propagacja błędu - cz. 3
 Wstęp do sieci neuronowych, wykład 6 Wsteczna propagacja błędu - cz. 3 Andrzej Rutkowski, Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2018-11-05 Projekt
Wstęp do sieci neuronowych, wykład 6 Wsteczna propagacja błędu - cz. 3 Andrzej Rutkowski, Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2018-11-05 Projekt
Definicja perceptronu wielowarstwowego
 1 Sieci neuronowe - wprowadzenie 2 Definicja perceptronu wielowarstwowego 3 Interpretacja znaczenia parametrów sieci 4 Wpływ wag perceptronu na jakość aproksymacji 4.1 Twierdzenie o uniwersalnych właściwościach
1 Sieci neuronowe - wprowadzenie 2 Definicja perceptronu wielowarstwowego 3 Interpretacja znaczenia parametrów sieci 4 Wpływ wag perceptronu na jakość aproksymacji 4.1 Twierdzenie o uniwersalnych właściwościach
Sztuczne Sieci Neuronowe
 Sztuczne Sieci Neuronowe Wykład 7 Sieci neuronowe o radialnych funkcjach bazowych wykład przygotowany na podstawie. S. Osowski, Sieci Neuronowe w ujęciu algorytmicznym, Rozdz. 5, PWNT, Warszawa 1996. 26/11/08
Sztuczne Sieci Neuronowe Wykład 7 Sieci neuronowe o radialnych funkcjach bazowych wykład przygotowany na podstawie. S. Osowski, Sieci Neuronowe w ujęciu algorytmicznym, Rozdz. 5, PWNT, Warszawa 1996. 26/11/08
Sztuczne sieci neuronowe (SNN)
") Sztuczne sieci neuronowe (SNN) Pozyskanie informacji (danych) Wstępne przetwarzanie danych przygotowanie ich do dalszej analizy Selekcja informacji Ostateczny model decyzyjny SSN - podstawy Sieci neuronowe
Sztuczne sieci neuronowe (SNN) Pozyskanie informacji (danych) Wstępne przetwarzanie danych przygotowanie ich do dalszej analizy Selekcja informacji Ostateczny model decyzyjny SSN - podstawy Sieci neuronowe
Prognozowanie kierunku ruchu indeksów giełdowych na podstawie danych historycznych.
 Metody Sztucznej Inteligencji 2 Projekt Prognozowanie kierunku ruchu indeksów giełdowych na podstawie danych historycznych. Autorzy: Robert Wojciechowski Michał Denkiewicz Mateusz Gągol Wstęp Celem projektu
Metody Sztucznej Inteligencji 2 Projekt Prognozowanie kierunku ruchu indeksów giełdowych na podstawie danych historycznych. Autorzy: Robert Wojciechowski Michał Denkiewicz Mateusz Gągol Wstęp Celem projektu
Uczenie sieci radialnych (RBF)
") Uczenie sieci radialnych (RBF) Budowa sieci radialnej Lokalne odwzorowanie przestrzeni wokół neuronu MLP RBF Budowa sieci radialnych Zawsze jedna warstwa ukryta Budowa neuronu Neuron radialny powinien
Uczenie sieci radialnych (RBF) Budowa sieci radialnej Lokalne odwzorowanie przestrzeni wokół neuronu MLP RBF Budowa sieci radialnych Zawsze jedna warstwa ukryta Budowa neuronu Neuron radialny powinien
Wstęp do sieci neuronowych, wykład 03 Warstwy RBF, jednostka ADALINE.
 Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka ADALINE. Maja Czoków, Jarosław Piersa, Andrzej Rutkowski Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 218-1-15/22 Projekt pn.
Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka ADALINE. Maja Czoków, Jarosław Piersa, Andrzej Rutkowski Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 218-1-15/22 Projekt pn.
Programowanie celowe #1
 Programowanie celowe #1 Problem programowania celowego (PC) jest przykładem problemu programowania matematycznego nieliniowego, który można skutecznie zlinearyzować, tzn. zapisać (i rozwiązać) jako problem
Programowanie celowe #1 Problem programowania celowego (PC) jest przykładem problemu programowania matematycznego nieliniowego, który można skutecznie zlinearyzować, tzn. zapisać (i rozwiązać) jako problem
Oprogramowanie Systemów Obrazowania SIECI NEURONOWE
 SIECI NEURONOWE Przedmiotem laboratorium jest stworzenie algorytmu rozpoznawania zwierząt z zastosowaniem sieci neuronowych w oparciu o 5 kryteriów: ile zwierzę ma nóg, czy żyje w wodzie, czy umie latać,
SIECI NEURONOWE Przedmiotem laboratorium jest stworzenie algorytmu rozpoznawania zwierząt z zastosowaniem sieci neuronowych w oparciu o 5 kryteriów: ile zwierzę ma nóg, czy żyje w wodzie, czy umie latać,
Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I
 Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje:
Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje:
1 Metody rozwiązywania równań nieliniowych. Postawienie problemu
 1 Metody rozwiązywania równań nieliniowych. Postawienie problemu Dla danej funkcji ciągłej f znaleźć wartości x, dla których f(x) = 0. (1) 2 Przedział izolacji pierwiastka Będziemy zakładać, że równanie
1 Metody rozwiązywania równań nieliniowych. Postawienie problemu Dla danej funkcji ciągłej f znaleźć wartości x, dla których f(x) = 0. (1) 2 Przedział izolacji pierwiastka Będziemy zakładać, że równanie
Wprowadzenie Metoda bisekcji Metoda regula falsi Metoda siecznych Metoda stycznych RÓWNANIA NIELINIOWE
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
Jakość uczenia i generalizacja
 Jakość uczenia i generalizacja Dokładność uczenia Jest koncepcją miary w jakim stopniu nasza sieć nauczyła się rozwiązywać określone zadanie Dokładność mówi na ile nauczyliśmy się rozwiązywać zadania które
Jakość uczenia i generalizacja Dokładność uczenia Jest koncepcją miary w jakim stopniu nasza sieć nauczyła się rozwiązywać określone zadanie Dokładność mówi na ile nauczyliśmy się rozwiązywać zadania które
Metody Rozmyte i Algorytmy Ewolucyjne
 mgr inż. Wydział Matematyczno-Przyrodniczy Szkoła Nauk Ścisłych Uniwersytet Kardynała Stefana Wyszyńskiego Podstawy optymalizacji Plan prezentacji 1 Podstawy matematyczne 2 3 Eliminacja ograniczeń Metody
mgr inż. Wydział Matematyczno-Przyrodniczy Szkoła Nauk Ścisłych Uniwersytet Kardynała Stefana Wyszyńskiego Podstawy optymalizacji Plan prezentacji 1 Podstawy matematyczne 2 3 Eliminacja ograniczeń Metody
5. Analiza dyskryminacyjna: FLD, LDA, QDA
 Algorytmy rozpoznawania obrazów 5. Analiza dyskryminacyjna: FLD, LDA, QDA dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. Liniowe funkcje dyskryminacyjne Liniowe funkcje dyskryminacyjne mają ogólną
Algorytmy rozpoznawania obrazów 5. Analiza dyskryminacyjna: FLD, LDA, QDA dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. Liniowe funkcje dyskryminacyjne Liniowe funkcje dyskryminacyjne mają ogólną
TEORETYCZNE PODSTAWY INFORMATYKI
 1 TEORETYCZNE PODSTAWY INFORMATYKI 16/01/2017 WFAiS UJ, Informatyka Stosowana I rok studiów, I stopień Repetytorium złożoność obliczeniowa 2 Złożoność obliczeniowa Notacja wielkie 0 Notacja Ω i Θ Rozwiązywanie
1 TEORETYCZNE PODSTAWY INFORMATYKI 16/01/2017 WFAiS UJ, Informatyka Stosowana I rok studiów, I stopień Repetytorium złożoność obliczeniowa 2 Złożoność obliczeniowa Notacja wielkie 0 Notacja Ω i Θ Rozwiązywanie
Sieci neuronowe w Statistica
 http://usnet.us.edu.pl/uslugi-sieciowe/oprogramowanie-w-usk-usnet/oprogramowaniestatystyczne/ Sieci neuronowe w Statistica Agnieszka Nowak - Brzezińska Podstawowym elementem składowym sztucznej sieci neuronowej
http://usnet.us.edu.pl/uslugi-sieciowe/oprogramowanie-w-usk-usnet/oprogramowaniestatystyczne/ Sieci neuronowe w Statistica Agnieszka Nowak - Brzezińska Podstawowym elementem składowym sztucznej sieci neuronowej
Sieci neuronowe w Statistica. Agnieszka Nowak - Brzezioska
 Sieci neuronowe w Statistica Agnieszka Nowak - Brzezioska Podstawowym elementem składowym sztucznej sieci neuronowej jest element przetwarzający neuron. Schemat działania neuronu: x1 x2 w1 w2 Dendrites
Sieci neuronowe w Statistica Agnieszka Nowak - Brzezioska Podstawowym elementem składowym sztucznej sieci neuronowej jest element przetwarzający neuron. Schemat działania neuronu: x1 x2 w1 w2 Dendrites
W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora.
 1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
Rozdział 2: Metoda największej wiarygodności i nieliniowa metoda najmniejszych kwadratów
 Rozdział : Metoda największej wiarygodności i nieliniowa metoda najmniejszych kwadratów W tym rozdziale omówione zostaną dwie najpopularniejsze metody estymacji parametrów w ekonometrycznych modelach nieliniowych,
Rozdział : Metoda największej wiarygodności i nieliniowa metoda najmniejszych kwadratów W tym rozdziale omówione zostaną dwie najpopularniejsze metody estymacji parametrów w ekonometrycznych modelach nieliniowych,
1 Relacje i odwzorowania
 Relacje i odwzorowania Relacje Jacek Kłopotowski Zadania z analizy matematycznej I Wykazać, że jeśli relacja ρ X X jest przeciwzwrotna i przechodnia, to jest przeciwsymetryczna Zbadać czy relacja ρ X X
Relacje i odwzorowania Relacje Jacek Kłopotowski Zadania z analizy matematycznej I Wykazać, że jeśli relacja ρ X X jest przeciwzwrotna i przechodnia, to jest przeciwsymetryczna Zbadać czy relacja ρ X X
Sieci neuronowe jako sposób na optymalizacje podejmowanych decyzji. Tomasz Karczyoski Wydział W-08 IZ
 optymalizacje podejmowanych decyzji Tomasz Karczyoski Wydział W-08 IZ Czym są sieci neuronowe Struktura matematycznych oraz programowy lub sprzętowy model, realizujących obliczenia lub przetwarzanie sygnałów
optymalizacje podejmowanych decyzji Tomasz Karczyoski Wydział W-08 IZ Czym są sieci neuronowe Struktura matematycznych oraz programowy lub sprzętowy model, realizujących obliczenia lub przetwarzanie sygnałów
Systemy pomiarowo-diagnostyczne. Metody uczenia maszynowego wykład III 2016/2017
 Systemy pomiarowo-diagnostyczne Metody uczenia maszynowego wykład III bogumil.konopka@pwr.edu.pl 2016/2017 Wykład III - plan Regresja logistyczna Ocena skuteczności klasyfikacji Macierze pomyłek Krzywe
Systemy pomiarowo-diagnostyczne Metody uczenia maszynowego wykład III bogumil.konopka@pwr.edu.pl 2016/2017 Wykład III - plan Regresja logistyczna Ocena skuteczności klasyfikacji Macierze pomyłek Krzywe
Sztuczne sieci neuronowe Ćwiczenia. Piotr Fulmański, Marta Grzanek
 Sztuczne sieci neuronowe Ćwiczenia Piotr Fulmański, Marta Grzanek Piotr Fulmański 1 Wydział Matematyki i Informatyki, Marta Grzanek 2 Uniwersytet Łódzki Banacha 22, 90-232, Łódź Polska e-mail 1: fulmanp@math.uni.lodz.pl,
Sztuczne sieci neuronowe Ćwiczenia Piotr Fulmański, Marta Grzanek Piotr Fulmański 1 Wydział Matematyki i Informatyki, Marta Grzanek 2 Uniwersytet Łódzki Banacha 22, 90-232, Łódź Polska e-mail 1: fulmanp@math.uni.lodz.pl,
Sieć przesyłająca żetony CP (counter propagation)
") Sieci neuropodobne IX, specyficzne architektury 1 Sieć przesyłająca żetony CP (counter propagation) warstwa Kohonena: wektory wejściowe są unormowane jednostki mają unormowane wektory wag jednostki są
Sieci neuropodobne IX, specyficzne architektury 1 Sieć przesyłająca żetony CP (counter propagation) warstwa Kohonena: wektory wejściowe są unormowane jednostki mają unormowane wektory wag jednostki są
S O M SELF-ORGANIZING MAPS. Przemysław Szczepańczyk Łukasz Myszor
 S O M SELF-ORGANIZING MAPS Przemysław Szczepańczyk Łukasz Myszor Podstawy teoretyczne Map Samoorganizujących się stworzył prof. Teuvo Kohonen (1982 r.). SOM wywodzi się ze sztucznych sieci neuronowych.
S O M SELF-ORGANIZING MAPS Przemysław Szczepańczyk Łukasz Myszor Podstawy teoretyczne Map Samoorganizujących się stworzył prof. Teuvo Kohonen (1982 r.). SOM wywodzi się ze sztucznych sieci neuronowych.
Wstęp do sieci neuronowych, wykład 02 Perceptrony c.d. Maszyna liniowa.
 Wstęp do sieci neuronowych, wykład 02 Perceptrony c.d. Maszyna liniowa. Maja Czoków, Jarosław Piersa, Andrzej Rutkowski Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2018-10-15 Projekt
Wstęp do sieci neuronowych, wykład 02 Perceptrony c.d. Maszyna liniowa. Maja Czoków, Jarosław Piersa, Andrzej Rutkowski Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2018-10-15 Projekt
Zrównoleglona optymalizacja stochastyczna na dużych zbiorach danych
 Zrównoleglona optymalizacja stochastyczna na dużych zbiorach danych mgr inż. C. Dendek prof. nzw. dr hab. J. Mańdziuk Politechnika Warszawska, Wydział Matematyki i Nauk Informacyjnych Outline 1 Uczenie
Zrównoleglona optymalizacja stochastyczna na dużych zbiorach danych mgr inż. C. Dendek prof. nzw. dr hab. J. Mańdziuk Politechnika Warszawska, Wydział Matematyki i Nauk Informacyjnych Outline 1 Uczenie
I EKSPLORACJA DANYCH
 I EKSPLORACJA DANYCH Zadania eksploracji danych: przewidywanie Przewidywanie jest podobne do klasyfikacji i szacowania, z wyjątkiem faktu, że w przewidywaniu wynik dotyczy przyszłości. Typowe zadania przewidywania
I EKSPLORACJA DANYCH Zadania eksploracji danych: przewidywanie Przewidywanie jest podobne do klasyfikacji i szacowania, z wyjątkiem faktu, że w przewidywaniu wynik dotyczy przyszłości. Typowe zadania przewidywania
Wstęp do sieci neuronowych, wykład 02 Perceptrony c.d. Maszyna liniowa.
 Wstęp do sieci neuronowych, wykład 02 Perceptrony c.d. Maszyna liniowa. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2011-10-11 1 Modelowanie funkcji logicznych
Wstęp do sieci neuronowych, wykład 02 Perceptrony c.d. Maszyna liniowa. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 2011-10-11 1 Modelowanie funkcji logicznych
Najprostsze modele sieci z rekurencją. sieci Hopfielda; sieci uczone regułą Hebba; sieć Hamminga;
 Sieci Hopfielda Najprostsze modele sieci z rekurencją sieci Hopfielda; sieci uczone regułą Hebba; sieć Hamminga; Modele bardziej złoŝone: RTRN (Real Time Recurrent Network), przetwarzająca sygnały w czasie
Sieci Hopfielda Najprostsze modele sieci z rekurencją sieci Hopfielda; sieci uczone regułą Hebba; sieć Hamminga; Modele bardziej złoŝone: RTRN (Real Time Recurrent Network), przetwarzająca sygnały w czasie
II. FUNKCJE WIELU ZMIENNYCH
 II. FUNKCJE WIELU ZMIENNYCH 1. Zbiory w przestrzeni R n Ustalmy dowolne n N. Definicja 1.1. Zbiór wszystkich uporzadkowanych układów (x 1,..., x n ) n liczb rzeczywistych, nazywamy przestrzenią n-wymiarową
II. FUNKCJE WIELU ZMIENNYCH 1. Zbiory w przestrzeni R n Ustalmy dowolne n N. Definicja 1.1. Zbiór wszystkich uporzadkowanych układów (x 1,..., x n ) n liczb rzeczywistych, nazywamy przestrzenią n-wymiarową
Rozdział 2. Liczby zespolone
 Rozdział Liczby zespolone Zbiór C = R z działaniami + oraz określonymi poniżej: x 1, y 1 ) + x, y ) := x 1 + x, y 1 + y ), 1) x 1, y 1 ) x, y ) := x 1 x y 1 y, x 1 y + x y 1 ) ) jest ciałem zob rozdział
Rozdział Liczby zespolone Zbiór C = R z działaniami + oraz określonymi poniżej: x 1, y 1 ) + x, y ) := x 1 + x, y 1 + y ), 1) x 1, y 1 ) x, y ) := x 1 x y 1 y, x 1 y + x y 1 ) ) jest ciałem zob rozdział
Rozpoznawanie obrazów
 Rozpoznawanie obrazów Ćwiczenia lista zadań nr 7 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Rozpoznawanie obrazów Ćwiczenia lista zadań nr 7 autorzy: A. Gonczarek, J.M. Tomczak Przykładowe problemy Klasyfikacja binarna Dla obrazu x zaproponowano dwie cechy φ(x) = (φ 1 (x) φ 2 (x)) T. Na obrazie
Wstęp do metod numerycznych 9a. Układy równań algebraicznych. P. F. Góra
 Wstęp do metod numerycznych 9a. Układy równań algebraicznych P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Układy równań algebraicznych Niech g:r N równanie R N będzie funkcja klasy co najmniej
Wstęp do metod numerycznych 9a. Układy równań algebraicznych P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Układy równań algebraicznych Niech g:r N równanie R N będzie funkcja klasy co najmniej
Pochodne cząstkowe i ich zastosowanie. Ekstrema lokalne funkcji
 Pochodne cząstkowe i ich zastosowanie. Ekstrema lokalne funkcji Adam Kiersztyn Lublin 2014 Adam Kiersztyn () Pochodne cząstkowe i ich zastosowanie. Ekstrema lokalne funkcji maj 2014 1 / 24 Zanim przejdziemy
Pochodne cząstkowe i ich zastosowanie. Ekstrema lokalne funkcji Adam Kiersztyn Lublin 2014 Adam Kiersztyn () Pochodne cząstkowe i ich zastosowanie. Ekstrema lokalne funkcji maj 2014 1 / 24 Zanim przejdziemy
10. Techniki minimalizacji a sieci neuronowe
 10. Techniki minimalizacji a sieci neuronowe 10-1 Błąd aproksymacji 10-2 Minimalizacja kosztu 10-3 Tryby minimalizacji 10-4 Metoda największego spadku 10-5 Gradient sprzężony 10-6 Metoda Newtona 10-7 Metody
10. Techniki minimalizacji a sieci neuronowe 10-1 Błąd aproksymacji 10-2 Minimalizacja kosztu 10-3 Tryby minimalizacji 10-4 Metoda największego spadku 10-5 Gradient sprzężony 10-6 Metoda Newtona 10-7 Metody
Metody eksploracji danych 2. Metody regresji. Piotr Szwed Katedra Informatyki Stosowanej AGH 2017
 Metody eksploracji danych 2. Metody regresji Piotr Szwed Katedra Informatyki Stosowanej AGH 2017 Zagadnienie regresji Dane: Zbiór uczący: D = {(x i, y i )} i=1,m Obserwacje: (x i, y i ), wektor cech x
Metody eksploracji danych 2. Metody regresji Piotr Szwed Katedra Informatyki Stosowanej AGH 2017 Zagadnienie regresji Dane: Zbiór uczący: D = {(x i, y i )} i=1,m Obserwacje: (x i, y i ), wektor cech x
13. Równania różniczkowe - portrety fazowe
 13. Równania różniczkowe - portrety fazowe Grzegorz Kosiorowski Uniwersytet Ekonomiczny w Krakowie rzegorz Kosiorowski (Uniwersytet Ekonomiczny 13. wrównania Krakowie) różniczkowe - portrety fazowe 1 /
13. Równania różniczkowe - portrety fazowe Grzegorz Kosiorowski Uniwersytet Ekonomiczny w Krakowie rzegorz Kosiorowski (Uniwersytet Ekonomiczny 13. wrównania Krakowie) różniczkowe - portrety fazowe 1 /
1 Równania nieliniowe
 1 Równania nieliniowe 1.1 Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym jest numeryczne poszukiwanie rozwiązań równań nieliniowych, np. algebraicznych (wielomiany),
1 Równania nieliniowe 1.1 Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym jest numeryczne poszukiwanie rozwiązań równań nieliniowych, np. algebraicznych (wielomiany),
Sieć Hopfielda. Sieci rekurencyjne. Ewa Adamus. ZUT Wydział Informatyki Instytut Sztucznej Inteligencji i Metod Matematycznych.
 Sieci rekurencyjne Ewa Adamus ZUT Wydział Informatyki Instytut Sztucznej Inteligencji i Metod Matematycznych 7 maja 2012 Jednowarstwowa sieć Hopfielda, z n neuronami Bipolarna funkcja przejścia W wariancie
Sieci rekurencyjne Ewa Adamus ZUT Wydział Informatyki Instytut Sztucznej Inteligencji i Metod Matematycznych 7 maja 2012 Jednowarstwowa sieć Hopfielda, z n neuronami Bipolarna funkcja przejścia W wariancie
KADD Metoda najmniejszych kwadratów funkcje nieliniowe
 Metoda najmn. kwadr. - funkcje nieliniowe Metoda najmniejszych kwadratów Funkcje nieliniowe Procedura z redukcją kroku iteracji Przykłady zastosowań Dopasowanie funkcji wykładniczej Dopasowanie funkcji
Metoda najmn. kwadr. - funkcje nieliniowe Metoda najmniejszych kwadratów Funkcje nieliniowe Procedura z redukcją kroku iteracji Przykłady zastosowań Dopasowanie funkcji wykładniczej Dopasowanie funkcji