Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel
|
|
|
- Laura Marek
- 8 lat temu
- Przeglądów:
Transkrypt
1 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel dmakow@dmcs.pl 1
2 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Rodzina procesorów ARM Asembler Urządzenia peryferyjne Programy wbudowane na przykładzie procesorów ARM Metodyki projektowania systemów wbudowanych Interfejsy w systemach wbudowanych Systemy czasu rzeczywistego 2
3 Od Acorn Computers Ltd. ARM do ARM Ltd. Acorn Firma utworzona w 1990 roku, Powstała z firmy produkującej komputery Acorn Computers, Firma ARM nie produkuje procesorów, Projektuje i sprzedaje licencje projektów tzw. rdzeni (Intellectual Property Cores) procesorów ARM oraz urządzeń peryferyjnych, Produkuje narzędzia, płyty prototypowe, narzędzia do debugowania, standardy. 3
4 Wybrane firmy produkujące procesory zgodne z architekturą ARM Agi lent, AKM, Alcatel, Altera, Atmel, Broadcom, Chip Express, Cirrus Logic, Digital Semiconductor, esilicon, Fujitsu, GEC Plessey, Global UniChip, HP, Hyundai, IBM, Intel, ITRI, LG Semicon, LSI Logic, Lu cent, Matsushita, Micrel, Micronas, Mitsubishi, Freescale, NEC, OKI, Philips, Qu alcomm, Rockwell, Rohm, Samsung, Samsung, Sanyo, Seagate, Seiko Epson, Sharp, Sony, STMicroelectronics, Symbios Logic, Texas Instru ments, Xilinx, Yamaha, Zeevo, ZTEIC,... 4
5 Zastosowanie procesorów ARM 5
6 Historia mikroprocesorów ARM 1985 Sophie Wilson and Steve Furber projektują pierwszy procesor RISC w firmie Acorn Computers Limited, Cambridge, ARM = Acorn (Advanced) RISC Machine 1985 prototypowe procesory ARM 1 (wersja architektury v1) 1986 procesory ARM 2 opuszczają fabrykę (32-bit, 26-bit adres, 16 rejestrów 16 bitowych, tranzystorów, wersja architektury v2/v2a, 8 MHz) 1990 Apple Computer i VLSI Technology rozpoczynają współpracę nad kolejną wersja rdzenia procesora ARM (ARMv3) 1990 wyłania się nowa firma Advanced RISC Machines Ltd. odpowiedzialna za dalszy rozwój procesorów ARM 1991 pojawia się pierwszy procesor będący wynikiem współpracy z firmą Apple procesor z jądrem ARM 6 (stosowany w jako procesor ARM 610 w Apple Newton PDA, wersja architektury v3, 33 MHz) 1995 firma ARM wprowadza na rynek bardzo udany model procesora z rdzeniem ARM7TDMI (architektura ARMv4T) oraz StrongARM (Intel, 233 MHz) 2001 firma ARM wprowadza kolejny model procesora z rdzeniem ARM9TDMI (architektura ARMv5TEJ, 220 MHz) 2003 procesory serii ARM 11 (architektura rdzenia ARMv6, 1 GHz, technologia 65 nm) 2004 procesor z rdzeniem Cortex M3 (ARMv7-M, 100 MHz) 2008 kolejny model procesora ARM Cordex A8/A9 (architektura ARMv7, 2 GHz), Cortex-R/M 6
7 Dostępne wersje architektury rdzenia ARM Liczba oraz rodzaj instrukcji, które realizują jednostki wykonawcze dostępnych rdzeni procesorów ARM zależą od wersji rdzenia (V1 - V7). Dostępne procesory AMR budowane są w oparciu o następujące wersje architektury: Układy z rdzeniami ARM7, wykorzystywane w aplikacjach o niskim poborze energii, wykorzystują podstawowy zestaw instrukcji udostępniany przez wersję 4T, Układy z rdzeniami ARM9 (ARM926EJ-S, ARM1026EJ-S) zbudowane są w oparciu o architekturę w wersji 5 (instrukcje DSP, rozbudowane instrukcje arytmetyczne MLA, itd...), Układy z rdzeniem ARM11 wykorzystują architekturę instrukcji w wersji 6 (instrukcje operujące na bajtach, instrukcje ułatwiające operacje graficzne), Układy z rodziny Cortex A8/A9, M3, R4 zbudowane są w oparciu o listę instrukcji w wersji 7 (nowy zestaw instrukcji 16 bitowych Thumb 2, rozbudowany system oszczędzania energii oraz bezpieczeństwa). 7
8 Rodzina procesorów ARM oraz ich zastosowanie 8
9 Architektury i dostępne rdzenie procesorów ARM 9

10 Porównanie wydajności procesorów 10
11 ARM silna dominacja na rynku Firma ARM sprzedaje obecnie ponad 10 milionów rdzeni procesorów każdego dnia (szacuje się, że wyprodukowano ponad 15 miliardów procesorów z rdzeniami ARM). Procesory ARM z rdzeniem w wersji ARMv7 (Cortex): Procesory do zastosowań komputerowych (Application Processors): Cortex-A silne procesory przeznaczony do obsługi systemów operacyjnych (cyfrowe dekodery, np. HDTV, DVD, komputery Netbook, telefony komórkowe, PDA, smartofony, cyfrowe ramki do zdjęć, itd...), Procesory do zastosowań wbudowanych (Embedded Processors): Cortex-R procesory przeznaczone do zastosowań w systemach czasu rzeczywistego (Real-time Applications, niski pobór mocy, szybka reakcja na zdarzenia zewnętrzne, np. motoryzacja: ABS, urządzenia peryferyjne komputera PC, sterowanie HDD, Ethernet, sterowniki drukarek), Cortex-M procesory będące odpowiednikami mikrokontrolerów (niski pobór mocy, niska cena, np. sterowanie procesami przemysłowymi, inteligentne czujniki, motoryzacja sterownie procesami innymi niż RT, M3 - tylko Thumb2). 11
12 ARM Cortex A9 w konfiguracji MPCore Technologia MPCore pozwala na budowę SoC cztery rdzenie procesorów A9 12
13 Procesory z rdzeniem ARM Procesory ARM są szeroko stosowane w systemach wbudowanych i systemach o niskim poborze mocy, ze względu na energooszczędną architekturę Procesor ARM jest jednym z najczęściej stosowanych procesorów na świecie. Jest używany w dyskach twardych, telefonach komórkowych, routerach, kalkulatorach a nawet w zabawkach dziecięcych Obecnie zajmuje ponad 75% rynku 32-bitowych CPU dla systemów wbudowanych Najbardziej udanym projektem ARM był procesor ARM7TDMI szeroko stosowany w systemach wbudowanych Moc obliczeniowa procesorów ARM umożliwia instalację na tym procesorze systemu operacyjnego, z zaimplementowanymi mechanizmami wielowątkowości, z możliwością wykorzystania zawartego w systemie stosu TCP/IP, systemu plików (np. FAT32). Systemy operacje: dystrybucje Embedded Linux (Embedded Debian, Embedded Ubuntu), Windows CE, Symbian, NUTOS (Ethernet),... 13
14 Zastosowanie procesorów ARM 14
15 Porównanie wybranych procesorów ARM Architecture Version ARM6 ARMv3 ARM7 ARMv3 ARM7TDMI ARMv5TEJ StrongARM ARMv4 Family ARM8 ARMv4 ARM9TDMI ARM9E ARM10E XScale ARM11 ARMv4T ARMv5TEJ ARMv5TE ARMv5TE ARMv6 Cortex ARMv7-A Core Feature ARM610 ARM7500FE ARM7EJ-S SA-110 Cache, no coprocessor Integrated SoC. "FE" Added FPA and EDO memory controller. Jazelle DBX, Enhanced DSP instructions, 5-stage pipeline 5-stage pipeline, MMU 5-stage pipeline, static branch prediction, double-bandwidth ARM810[7] memory ARM920T 5-stage pipeline ARM926EJ-S Jazelle DBX, Enhanced DSP instructions ARM1020E VFP, 6-stage pipeline, Enhanced DSP instructions PXA27x MMX and SSE instruction set, four MACs, ARM1136J(F)-S SIMD, Jazelle DBX, VFP, 8-stage pipeline Application profile, VFP, NEON, Jazelle RCT, Thumb-2, 13-stage Cortex-A8 superscalar pipeline Cache (I/D)/MMU Typical MHz 4K unified 4 KB unified 8 KB 16 KB/16 KB, MMU MHz MHz MHz MHz 8 KB unified, MMU 1.0 DMIPS/MHz 16 KB/16 KB, MMU variable, TCMs, MMU 32 KB/32 KB, MMU 32 Kb/32 Kb, MMU variable, MMU variable (L1+L2), MMU+TrustZone MHz MHz MHz MHz MHz >1000 MIPS@ 600 M-1 GHz 15
16 Rdzeń procesora ARM 16
17 Architektura ARM (1) Rdzeń procesora ARM procesor zgodny z architekturą ARM zaprojektowany w języku opisu sprzętu (najczęściej VHDL lub Verilog) dostarczony jako makrokomórka (ang. macrocell) lub IP (ang. Intellectual Property). Cechy rdzeni procesorów ARM: Przeznaczony do dalszej rozbudowy procesory, SoC 32-bitowy procesor zgodny z architekturą RISC Wbudowana jednostka zarządzania pamięcią MMU Zoptymalizowany pod względem niskiego poboru mocy Różne tryby pracy: 32-bitowe instrukcje ARM 16-bitowe instrukcje Thumb Instrukcje języka Java - Jazelle DBX Praca w trybie Big lub Little Endian Szybka obsługa przerwań (FIR Fast Interrupt Response), aplikacje czasu rzeczywistego Pamięć wirtualna Lista wydajnych instrukcji (zoptymalizowane na podstawie architektury RISC oraz CISC) Sprzętowe wsparcie dla języków wyższego poziomu 17
18 Architektura ARM (2) Rdzeń procesora ARM wykorzystuje architekturę RISC: Zredukowana liczba instrukcji, Brak bezpośredniego odwołania do pamięci tylko instrukcje operujące Load/Store na pamięci, Duża liczba dostępnych rejestrów ogólnego przeznaczenia, Architektura superskalarna. Różnice w odniesieniu do klasycznych procesorów RISC: Instrukcje wzbogacone o dodatkowe funkcje: Instrukcje Thumb/Thumb2, Instrukcje DSP, Warunkowe wykonywanie instrukcji, 32 bitowy przesuwnik bitowy, Instrukcje umożliwiające operacje na wielu rejestrach, Tryby adresowania z auto-dekrementacją i auto-inkrementacją. 18
19 Architektura ARM (3) Nomenklatura: ARM {x} {y} {z} {T} {D} {M} {I} {E} {J} {F} {S} x rodzina rdzenia y zarządzanie pamięcią/ochrona pamięci (opcjonalnie) z pamięć cache (opcjonalnie) T Thumb, rdzeń może wykonywać 16-bitowe rozkazy D Debug, rdzeń wyposażony w moduł JTAG umożliwiający debugowanie M Multiplier, wyposażony w sprzętowy układ mnożący (32x32 = 64 bit) I ICE, moduł pozwalający na debugowanie w układzie (ang. In-Circuit Emulator, breakpoints) E Enhanced DSP instructions, instrukcje przydatne podczas przetwarzania sygnałów J Jazelle, F Floating-point, moduł wspomagający obliczenia zmiennoprzecinkowe S Synhesizible version, wersja sytezowalna dostępne kody źródłowe dla narzędzi EDA Przykłady: ARM7TDMI ARM9TDMI-EJ-S 19
20 Architektura ARM (4) Wersja 1, v1 podstawowe operacje arytmetyczno/logiczne, programowe przerwania, 8 i 32 bitowe operacje na danych, 26-bitowy adres Wersja 2, v2 jednostka mnożąca oraz mnóż i sumuj (MAC), dostępny koprocesor, operacje służące do synchronizacji wątków, 26-bitowy adres Wersja 3, v3 nowe rejestry CPSR, SPSR, MRS, MSR, dostępne dodatkowe tryby pracy Abort i Undef, 32-bitowy adres 20
21 Architektura ARM (5) Wersja 4, v4 pierwsza oficjalnie zatwierdzona architektura w prowadzono 16-bitowe operacje na danych tryb pracy THUMB dodatkowy uprzywilejowany tryb pracy procesora (privileged mode) możliwość inkrementacji PC o podwójne słowo (64 bit) Wersja 5, v5 ulepszona współpraca procesora pomiędzy trybami ARM/THUMB, możliwość zmiany trybu procesora w czasie wykonywania programu dodana instrukcja CLZ (Count Leading Zeros) możliwość użycia programowych pułapek wsparcie dla pracy wieloprocesorowej Wersja 6, v6 ulepszona jednostka zarządzania pamięcią MMU (Management Memory Unit) sprzętowe wsparcie dla przetwarzania dźwięku i obrazu (FFT, MPEG4, SIMD, etc...) ulepszona obsługa wyjątków (nowa flaga w rejestrze PSR) 21
22 Rozkazy procesora ARM Z punktu widzenia wykonywanych instrukcji procesor ARM może pracować w jednym z następujących trybów: ARM definiuje 32-bitowe instrukcje (kod programu musi być wyrównany do granicy 4 bajtów), Thumb, Thumb-2 definiuje zestaw 16-bitowych instrukcji zoptymalizowanych pod kątem (kod programu musi być wyrównany do granicy 2 bajtów, wszystkie rejestry pracują w trybie 32 bitowym), Jazelle v1 tryb pozwalający na bezpośrednie wykonywanie instrukcji zgodnych ze specyfikacją języka Java (bez użycia maszyny wirtualnej JVM, 1000 Caffeine 200MHz) 22

23 Wsparcie dla języka Java Oznaczenie rdzenia procesora z literą 'J' Dynamiczne podmiana rejestrów oraz stosu Sprzętowa realizacja dekodera instrukcji nie maszyna wirtualna 23
24 Model programowy rejestry procesora Procesor ARM posiada łącznie 37 rejestrów (wszystkie są 32 bitowe): PC (r15) licznik programu (Program Counter) CPSR rejestr statusowy, obecny status (Current Program Status Register) SPSR rejestr statusowy, dostępne w różnych trybach uprzywilejowania (Saved Program Status Register) LR (r14) rejestr powrotu (Link Register), wykorzystywany podczas tworzenia ramki stosu (instrukcje skoku do funkcji) SP (r13) zwykle używany jako wskaźnik stosu (Stack Pointer) r0 - r12 rejestry ogólnego przeznaczenia Uwaga : Nie wszystkie rejestry są dostępne w różnych trybach uprzywilejowania procesora 24
25 Licznik programu W przypadku wykonywania instrukcji AMR: Wszystkie instrukcje są 32 bitowe, Wszystkie instrukcje muszą być wyrównane do granicy 4 bajtów PC wykorzystuje tylko 30 bitów (31..2). W przypadku wykonywania instrukcji Thumb: Wszystkie instrukcje są 16 bitowe, Wszystkie instrukcje muszą być wyrównane do granicy 2 bajtów, PC wykorzystuje tylko 31 bitów (31..1). W przypadku pracy w trybie Jazelle: Wszystkie instrukcje są 8 bitowe, Procesor odczytuje zawsze 4 kolejne instrukcje, PC wykorzystuje tylko 30 bitów (31..2). 25
26 Rejestr statusowy CPSR/SPSR procesora AMR N Z C V Q 23 J U n d e f i n e d f Wskaźniki stanu s V przepełnienie podczas operacji ALU (overflow) C przeniesienie/pożyczka podczas operacji ALU 7 6 x Przerwania I=1 4 0 I F T mode c Przerwania IRQ wyłączone F=1 Przerwania FIQ wyłączone Wskaźniki dostępne dla arch. xt Z zerowy wynik podczas operacji ALU T=0 Tryb pracy ARM N ujemny wynik operacji ALU lub mniejszy niż T=1 Tryb pracy Thumb Wskaźniki dostępne jedynie dla architektury 5TE/J 5 Tryb pracy procesora Definiują jeden z 7 trybów J Procesor w trybie Jazelle Q Sticky Overflow wskaźnik nasycenia podczas operacji ALU (QADD, QDADD, QSUB or QDSUB, lub rezultat operacji SMLAxy or SMLAWx przekracza 32-bity) 26
27 Model programowy dostępne tryby pracy procesora Tryb pracy procesora (operating mode) - określa jakie zasoby procesora są dostępne, np. dostępne rejestry, obszary pamięci, urządzenia peryferyjne. Procesory ARM mogą pracować w jednym z siedmiu trybów pracy: User tryb użytkownika (nieuprzywilejowany) przeznaczony do wykonywania programów użytkownika, FIQ tryb obsługujący przerwania i wyjątki o wysokich priorytetach (szybki) IRQ obsługa przerwań z niskim priorytetem (low/normal priority) Supervisor tryb pracy superużytkownika, dostęp do wszystkich zasobów procesora (dostępny po resecie lub przerwanie programowe) Abort obsługa wyjątków związanych z pamięcią (memory access violations) Undef obsługa nieznanych/błędnych rozkazów System tryb pracy superużytkownika, dostęp do rejestrów takich jak w trybie User jednak możliwy dostęp do różnych obszarów pamięci 27
28 Model programowy rejestry dostępne w trybie User oraz System Current Visible Registers User Mode r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) Banked out Registers FIQ IRQ SVC Undef Abort r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) spsr spsr spsr spsr spsr cpsr 28
29 Model programowy rejestry dostępne w trybie FIQ Current Visible Registers FIQ Mode r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) cpsr spsr Banked out Registers User IRQ SVC Undef Abort r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) spsr spsr spsr spsr 29
30 Model programowy rejestry dostępne w trybie IRQ Current Visible Registers IRQ Mode r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) cpsr spsr Banked out Registers User FIQ SVC Undef Abort r13 (sp) r8 r9 r10 r11 r12 r13 (sp) r13 (sp) r13 (sp) r13 (sp) r14 (lr) r14 (lr) r14 (lr) r14 (lr) r14 (lr) spsr spsr spsr spsr 30
31 Model programowy rejestry dostępne w trybie Supervisor Current Visible Registers SVC Mode r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) cpsr spsr Banked out Registers User FIQ IRQ Undef Abort r13 (sp) r8 r9 r10 r11 r12 r13 (sp) r13 (sp) r13 (sp) r13 (sp) r14 (lr) r14 (lr) r14 (lr) r14 (lr) r14 (lr) spsr spsr spsr spsr 31
32 Model programowy rejestry dostępne w trybie Abort Current Visible Registers Abort Mode r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) cpsr spsr Banked out Registers User FIQ IRQ SVC Undef r13 (sp) r14 (lr) r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) spsr spsr spsr spsr 32
33 Model programowy rejestry dostępne w trybie Undef Current Visible Registers Undef Mode r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) cpsr spsr Banked out Registers User FIQ IRQ SVC Abort r13 (sp) r8 r9 r10 r11 r12 r13 (sp) r13 (sp) r13 (sp) r13 (sp) r14 (lr) r14 (lr) r14 (lr) r14 (lr) r14 (lr) spsr spsr spsr spsr 33
34 Model programowy podsumowanie dostępnych rejestrów User r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) FIQ User mode r0-r7, r15, and cpsr IRQ User mode r0-r12, r15, and cpsr SVC Undef Abort User mode r0-r12, r15, and cpsr User mode r0-r12, r15, and cpsr User mode r0-r12, r15, and cpsr r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) spsr spsr spsr spsr spsr T humb state L ow registers T humb state H igh registers cpsr Note: System mode uses the User mode register set 34

35 Rejestry procesora a GDB (gdb) info r r0 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 r11 r12 sp lr pc fps cpsr 0x2 0x20000ba4 0x57b 0x270f 0x x3122dc 0x1000 0x800bc004 0x3122c4 0x407c81a4 0x441029ab 0x313f2c 0x313f30 0x313f18 0x20000a7c 0x x0 0x x2 0x20000ba4 0x57b 0x270f 0x x3122dc 0x1000 0x800bc004 0x3122c4 0x407c81a4 0x441029ab 0x313f2c 0x313f30 0x313f18 0x20000a7c 0x <delay+60> 0x0 0x
36 Obsługa sytuacji wyjątkowych Wyjątek (ang. exception) mechanizm kontroli przepływu danych występujący w mikroprocesorach oraz we współczesnych językach programowania służący do obsługi zdarzeń wyjątkowych, a w szczególności sytuacji błędnych. Wyjątki dzielimy na: niepowodzenia (ang. fault) błędy nienaprawialne (ang. abort) pułapki (ang. trap) przerwania (ang. interrupts) 36
37 Obsługa wyjątków Wystąpienie wyjątku w przypadku procesorów ARM powoduje: Wykonanie kopii CPSR do rejestru SPSR_<mode> Ustawienie odpowiednich bitów rejestru CPSR Zmiana trybu pracy do trybu ARM Przełączenie w tryb obsługi wyjątków Wyłączenie przerwań Zapisanie rejestru PC do rejestru LR_<mode> Ustawienie rejestru PC na adres odpowiedniego wektora obsługującego dany wyjątek W przypadku powrotu z wyjątku uchwyt obsługujący dany wyjątek powinien: FIQ IRQ 0x1C 0x18 0x10 (Reserved) Data Abort 0x0C Prefetch Abort 0x08 Software Interrupt 0x04 Undefined Instruction 0x00 Reset 0x14 Vector Table Odtworzyć rejestr PC z LR_<mode> Pozostałe operacje wykonywane są automatycznie (np. przywrócenie CPSR z SPSR_<mode>) Powyższe operacje można wykonać wyłącznie w trybie ARM Vector table can be at 0xFFFF0000 on ARM720T and on ARM9/10 family devices 37
38 Rdzenia procesora ARM7xxx Cechy rdzenia ARM7TDM: Architektura rdzenia ARMv4, Trójstopniowy potok wykonawczy, Procesor stałoprzecinkowy, Wykorzystywane w telefonach komórkowych, odtwarzaczach mp3, itd... 38

39 Struktura rdzenia ARM7TDM 39
40 Rdzenia procesora ARM9xxx Cechy rdzenia ARM9TDM: Architektura rdzenia ARMv5, Pięciostopniowy potok wykonawczy, Wbudowana jednostka zarządzania pamięcią MMU (wsparcie dla systemów operacyjnych WinCE, Linux, Symbian), Rozdzielona pamięć cache dla instrukcji i programu, Procesor stałoprzecinkowy, Zestaw instrukcji ARM, Thumb, Wykorzystywane w zaawansowanych telefonach komórkowych, urządzeniach telekomunikacyjnych, itd... 40
41 Potok wykonawczy instrukcji, ARM7 vs ARM9 ARM7TDMI Instruction Fetch Thumb ARM decompress FETCH ARM decode Reg Select DECODE Reg Read Shift ALU Reg Write EXECUTE ARM9TDMI Instruction Fetch ARM or Thumb Inst Decode Reg Reg Decode Read FETCH DECODE Shift + ALU EXECUTE Memory Access Reg Write MEMORY WRITE 41
42 Rdzenia procesora ARM11xx Cechy rdzenia ARM11TDM: Architektura rdzenia ARMv6, Siedmiostopniowy potok wykonawczy, Lepsza wydajność oraz obniżony pobór mocy, Rozdzielona pamięć cache dla instrukcji i programu, Dodatkowe instrukcje DSP oraz SIMD, Wykorzystywane w PDS, smartphonach, przenośnych grach komputerowych, itd... 42
43 Potok wykonawczy instrukcji, ARM10 vs ARM11 ARM10 Branch Prediction Instruction Fetch FETCH ARM or Thumb Instruction Decode ISSUE Reg Read DECODE Shift + ALU Memory Access Multiply Multiply Add EXECUTE MEMORY Reg Write WRITE ARM11 Fetch 1 Fetch 2 Decode Issue Shift ALU Saturate MAC 1 MAC 2 MAC 3 Address Data Cache 1 Data Cache 2 Write back 43

44 Potok wykonawczy procesora Cortex-A8 44
45 Porty wejścia-wyjścia procesora ARM AT91SAM
, Sterownik bezpośredniego dostępu do pamięci DMA (27 kanałów DMA), Wsparcie dla systemu debugowania EmbeddedICE, Dostępne instrukcje DSP (Digital Signal Processing) oraz wsparcie dla j.")
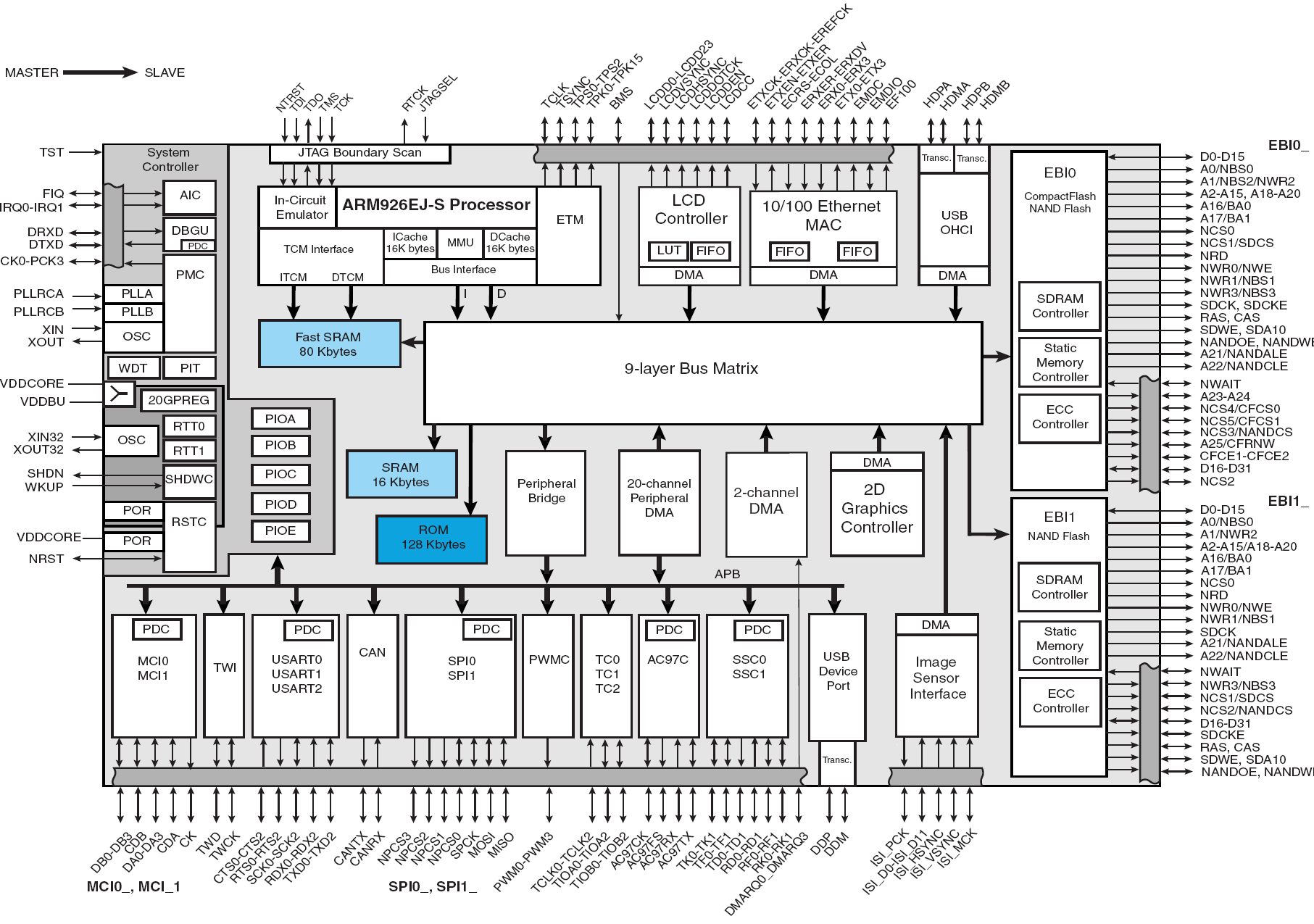
46 Mikrokontroler AT91SAM9263 (1) Cechy mikrokontrolera AT91SAM9263: architektura typu System-On-Chip, Jądro ARM926EJ-S (220 MIPS dla 200 MHz), Jednostka zarządzająca pamięcią MMU (Memory Management Unit), Sterownik bezpośredniego dostępu do pamięci DMA (27 kanałów DMA), Wsparcie dla systemu debugowania EmbeddedICE, Dostępne instrukcje DSP (Digital Signal Processing) oraz wsparcie dla j. Java, Bogate urządzenia peryferyjne: Sterownik wyświetlacza LCD TFT/STN (2D graphics co-processor, 2048x2048), Sterownik camery cyfrowej, Układ dostarczany w obudowie BGA 324 (wyprowadzenia), 46
47 47
48 Mikrokontroler AT91SAM dokumentacja 48
49 Mikrokontroler AT91SAM9263 porty I/O Źródło: ATMEL, doc6249.pdf, strona
50 Schemat blokowy 32-bitowego portu I/O Advanced Peripheral Bus 50
51 Zegar, a pobór energii 51
52 Rejestry sterujące portem I/O 52

53 Mapa pamięci rejestrów 53
54 Opis rejestów w dokumentacji 54
55 Schemat blokowy portu I/O PIO_ODR = 1 Port I/O PIO_ODSR (Output Data Status Reg.) PIO_CODR (clear) D Q PIO_SODR (set) D Q PIO_OER PIO_OSR Clk Clk PIO_OER Output Enable Register Clk PIO_ODR Output Disable Register PIO_OSR Output Status Register PIO_PDSR (Pin Data Status Register) 55
56 Schemat blokowy portu I/O sterowanie wyjściem Output Enable Reg. Pull-Up Enable Reg. 100 k Periph. A status Reg. PIO Enable Reg. Multi-driver Enable Reg. (OpenDrain) Set Output Data Reg. 56
57 Schemat blokowy portu I/O odczyt stanu wejścia Pin Data Status Reg. Interrupt Status Reg. Input Filter Diss. Reg. Interrupt Enable Reg. Interrupt Mask Reg. 57
, Zbocze sygnału (zmiana wartości logicznej sugnału")
58 Sygnał cyfrowy Sygnał cyfrowy charakteryzują następujące parametry: f częstotliwość (okres), A amplituda. Układ cyfrowy może reagować na: Poziom sygnału (powyżej lub poniżej określonej wartości), Zbocze sygnału (zmiana wartości logicznej sugnału z '0' na '1' lub z '1' na '0'). 58
59 Przebiegi czasowe podczas sterowania portem I/O 1 cykl zegarowy opóźnienia, gdy wyjście sterowane jest rejestrami SODR/CODR. 2 cykle opóźnienia podczas zapisu całego portu (32 bit, ustwione bity rejestru PIO_OWSR) 59

60 Odczyt stanu przełącznika Interrupt Polling loop IRQ Sygnał asynchroniczny 60
61 Zarządzanie sygnałem zegarowym urządzeń peryferyjnych PMC Peripheral Clock Enable Register Register Name:PMC_PCER Address: 0xFFFFFC10 write_register(pmc_pcer,0x ); // Peripheral clocks 4 and 8 are enabled. write_register(pmc_pcdr,0x ); // Peripheral clock 4 is disabled. 61
62 Rejestry odwzorowane w strukturze - powtórzenie typedef volatile unsigned int AT91_REG; // Hardware register definition typedef struct _AT91S_PIO { AT91_REG PIO_PER; // PIO Enable Register, 32-bit register AT91_REG PIO_PDR; // PIO Disable Register AT91_REG PIO_PSR; // PIO Status Register AT91_REG Reserved0[1]; // AT91_REG PIO_OER; // Output Enable Register AT91_REG PIO_ODR; // Output Disable Registerr AT91_REG PIO_OSR; // Output Status Register AT91_REG Reserved1[1]; // AT91_REG PIO_IFER; // Input Filter Enable Register AT91_REG PIO_IFDR; // Input Filter Disable Register AT91_REG PIO_IFSR; // Input Filter Status Register AT91_REG Reserved2[1]; // AT91_REG PIO_SODR; // Set Output Data Register AT91_REG PIO_CODR; // Clear Output Data Register AT91_REG PIO_ODSR; // Output Data Status Register } AT91S_PIO, *AT91PS_PIO; 62
63 Operacje na rejestrach 63
64 Kody liczbowe W systemach mikroprocesorowych wykorzystuje się następujące systemy liczbowe: Kod dziesiętny, np. 10d Kod binarny, np. 11b (3d) Kod ósemkowy, np. 0111U2 (49d) Kod szesnastkowy, np. 0x55h (85d) Konwersja pomiędzy systemami liczbowymi: b 0xE7h =14 * = 231d 0xAAh b 2^7 + 2^5 + 2^3 +2^1 = = 170d 0x13h? 78d? ? 64
65 Praca domowa Proszę zapisać następujące liczby w brakujących kodach liczbowych (dec, hex, bin, oct): b? 0x1234h? 546d? 078o? 123d 0xABCDEFh? b? 0xABCDEF12h? 32768d? 65
66 Liczby ujemne Wyróżnia się dwa systemy reprezentacji liczb ujemnych: Zapis w kodzie znak-moduł, Zapis w kodzie U2. Jak zapisać liczbę w kodzie U2? Negacja liczby, zwiększenie o 1: Przykłady: -1d 1111U2 1d 0001b neg. 1110b 1111U2-55 xxxu2-127 xxxu2-128 xxxu2 66
67 Operacje na pamięci w języku C volatile unsigned int * DataInMemory = 0x1000; DataInMemory = 0; DataInMemory = 0x ; DataInMemory = 0xFFFF.FFFF; How to clear single bit? How to set single bit? 67
68 Operacje na rejestrach w języku C volatile unsigned char* PORTA=0x A; *PORTA = 0x1; *PORTA = 7; *PORTA = 010; *PORTA = *PORTA 0x2; *PORTA = 0x1 0x2 0x8 ; *PORTA &= ~(0x2 0x4); *PORTA ^= (0x1 0x2); *PORTA ^= 0x3; If (*PORTA & (0x1 0x4)) == 0 {...} while (*PORTA!= 0x6) {...} do {...} while (*PORTA & 0x4) 68
69 Operacje na rejestrach w języku C (2) #define PB0 0x1 #define PB1 0x2 #define PB2 1<<2 #define PB3 1<<3 volatile unsigned char* PORTA=0x A; *PORTA = PB1 PB2; *PORTA &= ~(PB1 PB2); *PORTA ^= (PB1 PB2); If (*PORTA & (PB1 PB2)) == 0 enum {PB0=1<<0, PB1=1<<2, PB2=1<<3, PB3=1<<3}; 69
70 Operacje na rejestrach w języku C (3) volatile unsigned char* PORTA=0x A; /* macro for bit-mask */ #define BIT(x) (1 << (x)) *PORTA = BIT(0); *PORTA &=~BIT(1); *PORTA ^= BIT(2); /* macro for setting and clearing bits */ #define SETBIT(P, B) (P) = BIT(B) #define CLRBIT(P, B) (P) &= ~BIT(B) SETBIT(*PORTA, 7); CLRBIT(*PORTA, 2); 70
71 Register Concatenation int main(void) { unsigned char reg1=0x15, reg2=0x55; unsigned char = reg3, reg4; unsigned int tmp; /* concatenation operation */ tmp = reg1; tmp = tmp<<8 reg2; /* deconcatenation operation */ reg3 = tmp>>8; /* be careful with signed numbers */ reg4 = tmp & 0xFF; } 71
72 Rejestry odwzorowane w strukturze Deklaracja nowego typu danych tworzy szablon układu rejestrów procesora w pamięci. Rejestrom zostają przypisane nazwy symboliczne. Utworzono nowy typ danych AT91S_PIO oraz wskaźnik *AT91PS_PIO na ten typ. Brak informacji o dostępie do rejestów (R/W) oraz wartości rejestrów po resecie. W celu uzupełnienia brakujących informacji można umieścić dodatkowe komentarze. typedef struct _AT91S_PIO { /* Register name R/W Reset val. Offset AT91_REG PIO_PER; // PIO Enable Register W - 0x00 AT91_REG PIO_PDR; // PIO Disable Register W - 0x04 AT91_REG PIO_PSR; // PIO Status Register R - 0x08 AT91_REG Reserved0[1]; // AT91_REG PIO_OER; // Output Enable Register W - 0x10 AT91_REG PIO_ODR; // Output Disable Register W - 0x14 AT91_REG PIO_OSR; // Output Status Register W - 0x18 } /* blok rejestrów portów I/O PIOA...PIOE */ #define AT91C_BASE_PIOA (AT91PS_PIO) 0xFFFFF200 // (PIOA) Base Address /* maska zerowego bitu portu PA */ #define AT91C_PIO_PA0 (1 << 0) // Pin Controlled by PA0 72
73 Odwołanie do rejestrów Zapis do rejestru AT91PS_PIO->PIO_OER = 0x5; Odczyt danej z rejestru volatile unsigned int ReadData; ReadData = AT91PS_PIO->PIO_OSR; Operacje bitowe AT91C_BASE_PIOA->PIO_PER = (AT91C_PIO_PA0 AT91C_PIO_PA19); AT91C_BASE_PIOA->PIO_PER = ~(AT91C_PIO_PA0 AT91C_PIO_PA19); AT91C_BASE_PIOA->PIO_ODSR ^= (AT91C_PIO_PA0 AT91C_PIO_PA19); 73
74 Przykład rejestu sterującego timer czasu rzeczywistego // RTTC_RTMR : (RTTC Offset: 0x0) Real-time Mode Register #define AT91C_RTTC_RTPRES (0xFFFF << 0) // (RTTC) Real-time Timer Prescaler Value #define AT91C_RTTC_ALMIEN (0x1 << 16) // (RTTC) Alarm Interrupt Enable #define AT91C_RTTC_RTTINCIEN (0x1 << 17) // (RTTC) Real Time Timer Increment Interrupt Enable #define AT91C_RTTC_RTTRST (0x1 << 18) // (RTTC) Real Time Timer Restart 74
75 Definicja rejestrów pliki nagłówkowe #ifndef _PROJECT_H /* */ /* LEDs Definition */ /* */ #define _PROJECT_H /* * Include your AT91 Library files and specific * compiler definitions */ #include "AT91SAM9263-EK.h" #include "AT91SAM9263.h" #endif // _PROJECT_H #define AT91B_LED1 AT91C_PIO_PB8 /* DS1 */ #define AT91B_LED2 AT91C_PIO_PC29 /* DS2 */ #define AT91B_NB_LEB 2 #define AT91D_BASE_PIO_LED1 (AT91C_BASE_PIOB) #define AT91D_BASE_PIO_LED2 (AT91C_BASE_PIOC) #define AT91D_ID_PIO_LED1 (AT91C_ID_PIOB) #define AT91D_ID_PIO_LED2 (AT91C_ID_PIOC) /* */ /* Push Button Definition */ /* */ #define AT91B_BP1 AT91C_PIO_PC5 // Left click #define AT91B_BP2 AT91C_PIO_PC4 // Right click #define AT91D_BASE_PIO_BP AT91C_BASE_PIOC #define AT91D_ID_PIO_BP AT91C_ID_PIOCDE 75
76 Płyta uruchomieniowa MSC diody LED, klawiatura #define AT91B_LED1 AT91C_PIO_PB8 /* DS1 */ #define AT91B_LED2 AT91C_PIO_PC29 /* DS2 */ #define AT91B_BP1 AT91C_PIO_PC5 // Left click #define AT91B_BP2 AT91C_PIO_PC4 // Right clic 76
77 Konfiguracja portów I/O procesora #define AT91C_PIO_PB8 (1 << 8) #define AT91C_BASE_PIOB (AT91PS_PIO) // Pin Controlled by PB8 0xFFFFF400 // (PIOB) Base Address Konfiguracja Portu w tryb wejścia: /* Enable the periph clock for the PIO controller, This is mandatory when PIO are configured as input */ AT91C_BASE_PMC->PMC_PCER = (1 << AT91C_ID_PIOCDE ); // peripheral clock enable register (port C, D, E) /* Set the PIO line in input */ AT91C_BASE_PIOD->PIO_ODR = 0x F; // 1 Set direction of the pin to input /* Set the PIO controller in PIO mode instead of peripheral mode */ AT91C_BASE_PIOD->PIO_PER = AT91C_PIO_PB8; // 1 Enable PIO to control the pin Konfiguracja Portu w tryb wyjścia: /* Configure the pin in output */ AT91C_BASE_PIOB->PIO_OER = AT91C_PIO_PB8 ; /* Set the PIO controller in PIO mode instead of peripheral mode */ AT91C_BASE_PIOD->PIO_PER = 0xFFFF.FFFF; // 1 Enable PIO to control the pin AT91C_BASE_PIOE->PIO_PER = AT91C_PIO_PB31; /* Disable pull-up */ AT91C_BASE_PIOA->PIO_PPUDR = 0xFFFF.0000; // 1 Disable the PIO pull-up resistor 77
78 Układy do odmierzania czasu timery procesora 78
79 Timery Timer urządzenie peryferyjne procesora przeznaczone do odmierzania określonych przedziałów czasu (zliczania elementarnych cykli zegarowych). Po odmierzeniu wymaganego okresu czasu timer zwykle generuje przerwanie. Timery wykorzystywane są do odmierzania czasu systemowego, przełączania wątków, generacji opóźnień. Przykładów układów służących do odmierzania czasu: Timer PIT (ang. Periodic Interval Timer, Programmable Interrupt Timer), Timer Czasu Rzeczywistego RTT (ang. Real-Time Timer), Timer PWM (ang. Pulse Width Modulation), Timer uniwersalny TC (ang. Timer Counter), Timer Watch-dog WDT. 79
80 Moduł timera PIT (Periodic Interval Timer) 80
81 Schemat blokowy timera PIT Licznik bieżący Licznik pomocniczy 81
82 Automatyczne przeładowanie timera 0xFFFFF 0x00000 PITS=1 Okres generowanych przerwań: (PIV_VALUE+1)/(16 * Clk) Clk = 100 MHz, PIV = 0x1000 => tpit = 2,5 us 82
83 Przebiegi obrazujące pracę timera PIT 83
84 Rejestry timera PIT typedef struct S_PIT { /* AT91_REG PIT_MR; Register name R/W Reset val. Offset // PIT Mode Register R/W 0x000F.FFFF 0x00 AT91_REG PIT_SR; // PIT Status Register R 0x x04 AT91_REG PIT_PIVR; // PIT Per. Int. Val. Reg. R 0x x08 AT91_REG PIT_PIIR; // PIT Per. Int. Image Reg. R 0x x0C } S_PIT, *PS_PIT; /* blok rejestrów portów I/O PIOA...PIOE */ #define PIT ((PS_PIT) 0xFFFFFD30) // (PIT) Base Address 84
85 Rejestry timera PIT PIT_MR PITIEN PITEN PIV 0 19 PIT_SR PITS 1 0 PIT_PIVR/PIT_PIIR PICNT 31 CPIV
86 Kontroler przerwań AIC (Advanced Interrupt Controller) 86
87 Obsługa sytuacji wyjątkowych 87
88 Wyjątki Wyjątek (ang. exception) mechanizm kontroli przepływu danych występujący w mikroprocesorach oraz we współczesnych językach programowania służący do obsługi zdarzeń wyjątkowych, a w szczególności sytuacji błędnych. Szczególnym przypadkiem wyjątku jest przerwanie. Wyjątki dzielimy na: przerwania (ang. interrupts), niepowodzenia (ang. fault), błędy nienaprawialne (ang. abort), pułapki (ang. trap). Procesory ARM obsługują dwa rodzaje przerwań: FIQ (Fast interrupt) przerwania z szybką obsługą, IRQ (Interrupt) przerwania normalne. 88
89 Przerwania Przerwanie (ang. interrupt) lub żądanie przerwania (IRQ Interrupt ReQuest) sygnał powodujący zmianę przepływu sterowania, niezależnie od aktualnie wykonywanego programu. Pojawienie się przerwania powoduje wstrzymanie aktualnie wykonywanego programu i wykonanie przez procesor kodu procedury obsługi przerwania, uchwytu przerwania (ang. interrupt handler). W procesorach ARM wystąpienie przerwania powoduje ustawienie flagi w rejestrze statusowym sygnalizującej żądanie obsługi przerwania. Jeżeli system przerwań jest aktywny (rdzeń procesora) oraz dane przerwanie nie jest zamaskowane (sterownik przerwań) następuje przyjęcie przerwania przez procesor - skok do programu obsługującego przerwanie. Przykłady przerwań: odebranie lub zakończenie transmisji danej przez port szeregowy, zmiana stanu wyprowadzenia portu procesora. Stan urządzenia można sprawdzać programowo, jednak wymaga to ciągłego sprawdzania stanu rejestru statusowego. Taka operacja nazywana jest odpytywaniem (ang. poolling). Powoduje to znaczne obciążenie procesora, np. transmisja jednego znaku zajmuje ok. 100 us (procesor może w tym czasie wykonać kilka tysiące operacji). 89
90 Rejestr statusowy SPSR procesora ARM N Z C V Q 23 J U n d e f i n e d f Wskaźniki stanu s I F T x Przerwania mode c V przepełnie podczas operacji ALU (overflow) I=1 C przeniesienie/pożyczka podczas operacji ALU F=1 Przerwania FIQ wyłączone Z ujemny wynik podczas operacji ALU N ujemny wynik operacji ALU lub mniejszy niż Wskaźniki dostępne jedynie dla architektury 5TE/J J Procesor w trybie Jazelle Przerwania IRQ wyłączone Wskaźniki dostępne dla arch. xt T=0 Tryb pracy ARM T=1 Tryb pracy Thumb Tryb pracy procesora Definiują jeden z 7 trybów operacyjnych rdzenia procesora Q Sticky Overflow wskaźnik nasycenia podczas operacji ALU (QADD, QDADD, QSUB or QDSUB, lub rezultat operacji SMLAxy or SMLAWx przekracza 32-bity) 90
91 Obsługa sytuacji wyjątkowych Wykonanie niedozwolonej operacji przez procesor w danym stanie uprzywilejowania powoduje wygenerowanie wyjątku. Obsługa wyjątku obejmuje wszystkie operacje od momentu wykrycia błędu do pobrania pierwszej instrukcji obsługującej sytuację wyjątkową. 1. a) Wykonanie kopii CPSR SPSR oraz PC (r15) Link Register (r14), b) Przejście do trybu ARM (z trybu Thumb lub Jazelle), c) Przejście do trybu obsługi przerwań (FIQ/IRQ) lub wyjątków, d) Ustawienie maski IRQ na poziomie zgłaszanego przerwania (lub wyłączenie przerwań). e) Przełączenie banku rejestrów, f) Uaktywnienie rejestru SPSR Określenie wektora obsługiwanego wyjątku (przerwania). Obliczenie adresu pierwszej instrukcji procedury obsługującej dany wyjątek (przerwanie). 91
92 Powrót z obsługi sytuacji wyjątkowych 1. a) Odtworzenie rejestru CPSR (r15), b) PC (Link Register r14), c) Powrót do wykonywanego rozkazu. 0x1C Tablica wektorów przerwań umieszczona po resecie pod adresem 0x0. Tablice można przesunąć pod adres 0xFFFF.0000 (ARM 7/9/10). 0x18 FIQ IRQ 0x10 (Reserved) Data Abort 0x0C Prefetch Abort 0x08 Software Interrupt 0x04 Undefined Instruction 0x00 Reset 0x14 Fragment pamięci 92
93 Struktura stosu (1) Stos (ang. stack lub LIFO Last-In, First-Out) liniowa struktura danych, w której dane odkładane są na wierzch stosu i z wierzchołka stosu są zdejmowane. Ideę stosu danych można zilustrować jako stos położonych jedna na drugiej książek nowy egzemplarz kładzie się na wierzch stosu i z wierzchu stosu zdejmuje się kolejne egzemplarze. Elementy stosu poniżej wierzchołka stosu można wyłącznie obejrzeć, aby je ściągnąć, trzeba najpierw po kolei ściągnąć to, co jest nad nimi FIFO (ang. First In, First Out) - przeciwieństwem stosu LIFO jest kolejka, bufor typu FIFO (pierwszy na wejściu, pierwszy na wyjściu), w którym dane obsługiwane są w takiej kolejności, w jakiej zostały dostarczone (jak w kolejce do kasy) 93
94 Struktura stosu odłożenie danej na stos rejestr R13 - wskaźnik stosu 0x pole wolne SP = R13 Zawartość rejestrów R1,R2,R3,R7-R9 pole wolne Ostatnio odłożona dana 0x SP = R13 n-1 STMDB SP!, {lista rejestrów} zmniejszenie SP o 24, odłożenie zawartości rejestrów na STMDB SP!, {R1,R2,R3,R7-R9} stos, 94
95 Struktura stosu zdjęcie danej ze stosu rejestr R13 - wskaźnik stosu 0x pole wolne SP = R13 Zawartość rejestrów R1,R2,R3,R7-R9 pole wolne Ostatnio odłożona dana 0x LDMIA LDMIA SP = R13 n-1 SP!, {lista rejestrów} zwiększenie SP o 24, odłożenie zawartości rejestrów na SP!, {R1,R2,R3,R7-R9} stos, 95
96 Schemat blokowy sterownika przerwań procesora ARM Obsługa przerwań wektorowych, Obsługa do 32 przerwań zewnętrznych i wewnętrznych, Możliwość maskowania dowolnego przerwania, Obsługa przerwań nirq i szybkich nfir (ang. Fast Interrupt Request), 8 poziomów priorytetów (0- najniższy, 7- najwyższy), Obsługa przerwań wyzwalanych poziomem lub zboczem. 96
97 Schemat blokowy sterownika przerwań procesora ARM Sterownik przerwań wykorzystuje zegar systemowy. Zegar doprowadzany jest przez cały czas pracy procesora (nie ma możliwości odcięcia zegara). Przerwania mogą zostać wykorzystane do wyprowadzenia procesora ze stanu uśpienia (Idle mode). Przerwanie o numerze 0 (FIQ) jest zawsze przerwaniem typu FIQ. Przerwanie o numerze 1 (SYS) sumą logiczną przerwań od urządzeń peryferyjnych procesora. W procedurze obsługi przerwania należy określić urządzenie/a zgłaszające przerwanie/a. Przerwania o numerach 2-31 (PID2-PID31) mogą zostać dołączone do urządzeń peryferyjnych (użytkownika) lub portów I/O. Sterownik obsługuje przerwania wyzwalane poziomem lub zboczem sygnału. 97
98 Przerwania współdzielone Blok urządzeń systemowy (AT91C_ID_SYS) dysponuje jednym, wspólnym przerwaniem SYS (ang. shared interrupt) o numerze ID=1, które obejmuje następujące urządzenia: timery PIT, RTT, WDT, interfejs diagnostyczny DBGU, Sterownik DMA PMC, Układ zerowania procesora RSTC, Sterownik pamięci MC. W procedurze obsługi przerwania SYS należy sprawdzić kolejno stan wszystkich urządzeń, czy występują przerwania odmaskowane. Jeżeli przerwanie jest aktywne należy sprawdzić flagę sygnalizującą przerwanie w rejestrze statusu danego urządzenia. Jeżeli flaga jest ustawiona należy wykonać program związany z obsługą przerwania od danego urządzenia. 98
99 Szczególowy schemat blokowy sterownika AIC 99
100 Przerwania wewnętrzne Maska przerwań AIC_IECR/IDCR (status AIC_IMR), Wyczyszczenie flagi przerwania podczas odczytu rejestru AIC_IVR (przerwania FIQ AIC_FVR), Status przerwań dostępny w rejestrze AIC_IPR 100
101 Przerwania zewnętrzne Możliwość wyboru zbocza opadającego/narastającego lub poziomu niskiego/wysokiego do generacji przerwań. 101
102 Definicja numerów urządzeń peryferyjnych // ***************************************************************************** // PERIPHERAL ID DEFINITIONS FOR AT91SAM9263 // ***************************************************************************** #define AT91C_ID_FIQ #define AT91C_ID_SYS ( 0) // Advanced Interrupt Controller (FIQ) ( 1) // System Controller #define AT91C_ID_PIOA ( 2) // Parallel IO Controller A #define AT91C_ID_PIOB ( 3) // Parallel IO Controller B #define AT91C_ID_PIOCDE ( 4) // Parallel IO Controller C, Parallel IO Controller D, Parallel IO Controller E #define AT91C_ID_US0 ( 7) // USART 0 #define AT91C_ID_US1 ( 8) // USART 1 #define AT91C_ID_US2 ( 9) // USART 2 #define AT91C_ID_MCI0 (10) // Multimedia Card Interface 0 #define AT91C_ID_MCI1 (11) // Multimedia Card Interface 1 #define AT91C_ID_CAN (12) // CAN Controller #define AT91C_ID_TWI (13) // Two-Wire Interface #define AT91C_ID_SPI0 (14) // Serial Peripheral Interface ID=0, ID=30-31 przerwania zewnętrzne, pozostałe to przerwania wewnętrzne. 102
103 Rejestry sterownika przerwań (1) 103
104 Rejestry sterownika przerwań typedef struct _AT91S_AIC { AT91_REG AIC_SMR[32]; // Source Mode Register AT91_REG AIC_SVR[32]; // Source Vector Register AT91_REG AIC_IVR; // IRQ Vector Register AT91_REG AIC_FVR; // FIQ Vector Register AT91_REG AIC_ISR; // Interrupt Status Register AT91_REG AIC_IPR; // Interrupt Pending Register AT91_REG AIC_IMR; // Interrupt Mask Register AT91_REG AIC_CISR; // Core Interrupt Status Register... } AT91S_AIC, *AT91PS_AIC; #define AT91C_BASE_AIC Base Address (AT91_CAST(AT91PS_AIC) 0xFFFFF000) // (AIC) 104
105 Rejestry sterownika przerwań (2) AIC_SMR[32]; // Source Mode Register konfiguracja poziomu oraz sposobu wyzwalania AIC_SVR[32]; // Source Vector Register handlery obsługujące przerwania AIC_IVR; // IRQ Vector Register adres handlera na obsługiwanego przerwania AIC_FVR; // FIQ Vector Register adres handlera na obsługiwanego przerwania AIC_ISR; // Interrupt Status Register numer obsługiwanego przerwania AIC_IPR; // Interrupt Pending Register rejestr z flagami oczękujących przerwań 0-31 AIC_IMR; // Interrupt Mask Register rejestr z maskami przerwań 0-31 AIC_CISR; // Core Interrupt Status Register stan przerwań rdzenia IRQ/FIQ AIC_IECR; // Interrupt Enable Command Register rejestr uaktywniający przerwania AIC_IDCR; // Interrupt Disable Command Register rejestr wyłączający przerwania AIC_ICCR; // Interrupt Clear Command Register rejestr ustawiający flagi przerwań AIC_ISCR; // Interrupt Set Command Register rejestr kasujący flagi przerwań AIC_EOICR; // End of Interrupt Command Register koniec obsługi przerwania AIC_SPU; // Spurious Vector Register handler do przerwania fałszywego 105
106 Procedura obsługująca przerwanie od timera PIT i klawiatury Ustawienie adresu funkcji (handlera) obsługującego przerwanie (adres 32-bitowy) AT91C_BASE_AIC->AIC_SVR[AT91C_ID_SYS] = (unsigned long) TIMER_handler; Procedura obsługi przerwania od timera void TIMER_handler (void) { Odczyt rejestru statutowego PITC_PISR jeżeli flaga od timera INT_ENABLE jest ustawiona (rejestr PITC_PIMR) to odczyt rejestru PITC_PIVR - skasowanie flagi przerwania jeżeli nie to inne urządzenie peryferyjne zgłosiło przerwanie odpowiednia reakcja } Procedura obsługi przerwania od klawiatury void BUTTON_handler (void) { Odczyt rejestru statutowego PIO_ISR - skasowanie flagi przerwania jeżeli flaga na odpowiednim bicie rejestru PIO_ISR jest ustawiona to oznacza to wciśnięcie przycisku } 106
107 Konfiguracja przerwań od klawiatury Przyciski dołączone są do portu C przerwania generowane przez układy wejściowe portu C/D/E (maska AT91C_ID_PIOCDE) Konfiguracja przerwań od portów C/D/E: 1. Konfiguracja portów procesora jako porty wejściowe (przycisk lewy i prawy) 2. Wyłączenie przerwań generowanych przez porty C/D/E (rejestr AIC_IDCR, AT91C_ID_PIOCDE) 3. Ustawienie wskaźnika do procedury obsługującej przerwanie dla portów C/D/E w tablicy wektorów SVR (AIC_SVR[AT91C_ID_PIOCDE]) 4. Konfiguracja poziomu i metody wyzwalania przerwania (rejestr AIC_SMR, wyzwalanie wysokim poziomem AT91C_AIC_SRCTYPE_EXT_HIGH_LEVEL oraz priorytet AT91C_AIC_PRIOR_HIGHEST) 5. Wyczyszczenie flagi przerwania portów C/D/E (rejestr AIC_ICCR) 6. Włącznie przerwań dla obu przycisków (rejestr PIO_IER) 7. Włączenie przerwania od portów C/D/E (AIC_IECR) 8. Włączenie portu IO 107
108 Konfiguracja przrwań od Timera PIT Timer PIT generuje przerwania o numerze 1 przerwania od urządzeń peryferyjnych (System Controller, maska AT91C_ID_SYS) Konfiguracja przerwań od Timera PIT 1. Konfiguracja okresu timera, np. 5 ms 2. Wyłączenie przerwania od Timera PIT na czas konfiguracji (AIC_IDCR, przerwanie nr 1 urządzenia peryferyjne procesora, stała AT91C_ID_SYS) 3. Ustawienie wskaźnika do procedury obsługującej przerwanie dla urządzeń peryferyjnych w tablicy wektorów AIC_SVR (AIC_SVR[AT91C_ID_SYS]) 4. Konfiguracja poziomu i metody wyzwalania przerwania (rejestr AIC_SMR, wyzwalanie AT91C_AIC_SRCTYPE_INT_LEVEL_SENSITIVE, dowolny poziom, np. AT91C_AIC_PRIOR_LOWEST) 5. Wyczyszczenie flagi przerwania urządzeń peryferyjnych (rejestr AIC_ICCR) 6. Włącznie przerwania urządzeń peryferyjnych AT91C_ID_SYS (rejestr AIC_IECR) 7. Włączenie przerwania od Timera (AT91C_PITC_PITIEN) 8. Włączenie Timera PIT (AT91C_PITC_PITEN) 9. Wyzerowanie tzw. licznika lokalnego Timera (zmienna Local_Counter) 108
109 Funkcje obsługujące przerwania w języku C (1) Deklaracja procedur obsługujących przerwania (kompilator GCC) wymaga użycia dyrektywy preprocesora attribute ((interrupt("irq"))); void INTButton_handler() attribute ((interrupt("irq"))); void INTPIT_handler() attribute ((interrupt("irq"))); void Soft_Interrupt_handler() attribute ((interrupt("swi"))); void Abort_Exception_handler() attribute ((interrupt("abort"))); void Undef_Exception_handler() attribute ((interrupt("undef"))); Funkcja obsługująca przerwanie nie różni się od klaszycznej funkcji w języku C void INTButton_handler() { // standard C function } Podczas pisania programów na laboratorium nie należy używać atrybutu attribute ((interrupt("irq"))) przerwania zagnieżdzone obsługiwane są przez funkcję umieszczoną w pliku startowym (startup.s). 109
110 Funkcje obsługujące przerwania w języku C (2).size Open_INTButtons,.-Open_INTButtons.size Open_INTButtons,.-Open_INTButtons.align 2.align 2.global INTButton_handler.global INTButton_handler INTButton_handler:.type INTButton_handler, Interrupt Service Routine. args = 0, pretend = 0, frame = args = 0, pretend = 0, frame = frame_needed = 1, uses_anonymous_args = frame_needed = 1, uses_anonymous_args = 0 str ip, [sp, #-4]! // store R12 mov ip, sp // move sp to ip stmfd sp!, {r1, r2, r3, fp, ip, lr, pc} mov ip, sp stmfd // store R12 sp!, {fp, ip, lr, pc} sub fp, ip, #4 // allocate dataframe sub fp, ip, #4 // allocate dataframe sub sp, sp, #8 // on stack for local sub sp, sp, #8 // on stack for local // data // data Właściwy program obsługujący przerwanie Właściwy program obsługujący przerwanie sub sub sp, fp, #24 // rem. frame from st ldmfd sp, {r1, r2, r3, fp, sp, lr} ldmfd sp!, {ip} subs pc, lr, #4 // recover R12 sp, fp, #12 ldmfd // rem. frame from stac sp, {fp, sp, pc} // recover registers // and return from // return from INT // function 110
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel
 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw
 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Rodzina procesorów
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Rodzina procesorów
Procesory ARM w systemach wbudowanych
 Rodzina procesorów ARM Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki
Rodzina procesorów ARM Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki
Procesory ARM w systemach wbudowanych
 Rodzina procesorów ARM Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki
Rodzina procesorów ARM Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw
 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Rodzina procesorów
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Rodzina procesorów
Wykład 2. Mikrokontrolery z rdzeniami ARM
 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów ARM są szeroko
Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów ARM są szeroko
Wykład 2. Mikrokontrolery z rdzeniami ARM
 Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Procesory firmy ARM i MIPS
 Procesory firmy ARM i MIPS 1 Architektura procesorów ARM Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC.
Procesory firmy ARM i MIPS 1 Architektura procesorów ARM Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC.
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu
 Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Rynkowe nowości, część 1
 Rynkowe nowości, część 1 Procesor, którego nie było Historia ARM-ów sięga roku 1985, kiedy to firma Acorn Computer Group opracowała pierwszy na świecie komercyjny procesor RISC, który po dość istotnych
Rynkowe nowości, część 1 Procesor, którego nie było Historia ARM-ów sięga roku 1985, kiedy to firma Acorn Computer Group opracowała pierwszy na świecie komercyjny procesor RISC, który po dość istotnych
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Układ wykonawczy, instrukcje i adresowanie. Dariusz Chaberski
 Układ wykonawczy, instrukcje i adresowanie Dariusz Chaberski System mikroprocesorowy mikroprocesor C A D A D pamięć programu C BIOS dekoder adresów A C 1 C 2 C 3 A D pamięć danych C pamięć operacyjna karta
Układ wykonawczy, instrukcje i adresowanie Dariusz Chaberski System mikroprocesorowy mikroprocesor C A D A D pamięć programu C BIOS dekoder adresów A C 1 C 2 C 3 A D pamięć danych C pamięć operacyjna karta
Wykład 5. Architektura ARM
 Wykład 5 Architektura ARM Plan wykładu ARM co to jest? od historii od dzisiaj Wersje architektury ARMv1 ARMv7 Rodziny obecnie w użyciu ARM7 Cortex-A9 Listy instrukcji ARM, Thumb, Thumb-2, NEON, Jazelle
Wykład 5 Architektura ARM Plan wykładu ARM co to jest? od historii od dzisiaj Wersje architektury ARMv1 ARMv7 Rodziny obecnie w użyciu ARM7 Cortex-A9 Listy instrukcji ARM, Thumb, Thumb-2, NEON, Jazelle
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel
 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Sprawy formalne Informacje wstępne Egzamin Laboratorium Materiały do wykładu
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Sprawy formalne Informacje wstępne Egzamin Laboratorium Materiały do wykładu
Bibliografia: pl.wikipedia.org www.intel.com. Historia i rodzaje procesorów w firmy Intel
 Bibliografia: pl.wikipedia.org www.intel.com Historia i rodzaje procesorów w firmy Intel Specyfikacja Lista mikroprocesorów produkowanych przez firmę Intel 4-bitowe 4004 4040 8-bitowe x86 IA-64 8008 8080
Bibliografia: pl.wikipedia.org www.intel.com Historia i rodzaje procesorów w firmy Intel Specyfikacja Lista mikroprocesorów produkowanych przez firmę Intel 4-bitowe 4004 4040 8-bitowe x86 IA-64 8008 8080
Architektura mikroprocesorów z rdzeniem ColdFire
 Architektura mikroprocesorów z rdzeniem ColdFire 1 Rodzina procesorów z rdzeniem ColdFire Rdzeń ColdFire V1: uproszczona wersja rdzenia ColdFire V2. Tryby adresowania, rozkazy procesora oraz operacje MAC/EMAC/DIV
Architektura mikroprocesorów z rdzeniem ColdFire 1 Rodzina procesorów z rdzeniem ColdFire Rdzeń ColdFire V1: uproszczona wersja rdzenia ColdFire V2. Tryby adresowania, rozkazy procesora oraz operacje MAC/EMAC/DIV
Architektura Systemów Komputerowych. Rozwój architektury komputerów klasy PC
 Architektura Systemów Komputerowych Rozwój architektury komputerów klasy PC 1 1978: Intel 8086 29tys. tranzystorów, 16-bitowy, współpracował z koprocesorem 8087, posiadał 16-bitową szynę danych (lub ośmiobitową
Architektura Systemów Komputerowych Rozwój architektury komputerów klasy PC 1 1978: Intel 8086 29tys. tranzystorów, 16-bitowy, współpracował z koprocesorem 8087, posiadał 16-bitową szynę danych (lub ośmiobitową
System mikroprocesorowy i peryferia. Dariusz Chaberski
 System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Programowanie w asemblerze ARM wprowadzenie
 Programowanie w asemblerze ARM wprowadzenie 17 stycznia 2017 Historia Firma ARM Ltd. powstała w 1990 roku jako Advanced RISC Machines Ltd., joint venture firm Acorn Computers, Apple Computer i VLSI Technology.
Programowanie w asemblerze ARM wprowadzenie 17 stycznia 2017 Historia Firma ARM Ltd. powstała w 1990 roku jako Advanced RISC Machines Ltd., joint venture firm Acorn Computers, Apple Computer i VLSI Technology.
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Mikroprocesor Operacje wejścia / wyjścia
 Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
Przerwania, polling, timery - wykład 9
 SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
Architektura mikroprocesorów z rdzeniem ColdFire
 Architektura mikroprocesorów z rdzeniem ColdFire 1 Obsługa sytuacji wyjątkowych (Exception Processing) 2 Wyjątki Wyjątek (ang. exception) mechanizm kontroli przepływu danych występujący w mikroprocesorach
Architektura mikroprocesorów z rdzeniem ColdFire 1 Obsługa sytuacji wyjątkowych (Exception Processing) 2 Wyjątki Wyjątek (ang. exception) mechanizm kontroli przepływu danych występujący w mikroprocesorach
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu
 Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
UTK ARCHITEKTURA PROCESORÓW 80386/ Budowa procesora Struktura wewnętrzna logiczna procesora 80386
 Budowa procesora 80386 Struktura wewnętrzna logiczna procesora 80386 Pierwszy prawdziwy procesor 32-bitowy. Zawiera wewnętrzne 32-bitowe rejestry (omówione zostaną w modułach następnych), pozwalające przetwarzać
Budowa procesora 80386 Struktura wewnętrzna logiczna procesora 80386 Pierwszy prawdziwy procesor 32-bitowy. Zawiera wewnętrzne 32-bitowe rejestry (omówione zostaną w modułach następnych), pozwalające przetwarzać
Podstawy Techniki Mikroprocesorowej
 Podstawy Techniki Mikroprocesorowej Architektury mikroprocesorów Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Podstawy Techniki Mikroprocesorowej Architektury mikroprocesorów Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Wykład 7. Architektura mikroprocesorów powtórka
 Wykład 7 Architektura mikroprocesorów powtórka Architektura mikroprocesorów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit:
Wykład 7 Architektura mikroprocesorów powtórka Architektura mikroprocesorów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit:
Procesory rodziny x86. Dariusz Chaberski
 Procesory rodziny x86 Dariusz Chaberski 8086 produkowany od 1978 magistrala adresowa - 20 bitów (1 MB) magistrala danych - 16 bitów wielkość instrukcji - od 1 do 6 bajtów częstotliwośc pracy od 5 MHz (IBM
Procesory rodziny x86 Dariusz Chaberski 8086 produkowany od 1978 magistrala adresowa - 20 bitów (1 MB) magistrala danych - 16 bitów wielkość instrukcji - od 1 do 6 bajtów częstotliwośc pracy od 5 MHz (IBM
Architektura mikroprocesorów TEO 2009/2010
 Architektura mikroprocesorów TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit: 8051, ST7 Wykład
Architektura mikroprocesorów TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit: 8051, ST7 Wykład
Wykład 6. Mikrokontrolery z rdzeniem ARM
 Wykład 6 Mikrokontrolery z rdzeniem ARM Plan wykładu Cortex-A9 c.d. Mikrokontrolery firmy ST Mikrokontrolery firmy NXP Mikrokontrolery firmy AnalogDevices Mikrokontrolery firmy Freescale Mikrokontrolery
Wykład 6 Mikrokontrolery z rdzeniem ARM Plan wykładu Cortex-A9 c.d. Mikrokontrolery firmy ST Mikrokontrolery firmy NXP Mikrokontrolery firmy AnalogDevices Mikrokontrolery firmy Freescale Mikrokontrolery
Pośredniczy we współpracy pomiędzy procesorem a urządzeniem we/wy. W szczególności do jego zadań należy:
 Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Spis treúci. Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1. Przedmowa... 9. Wstęp... 11
 Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1 Spis treúci Przedmowa... 9 Wstęp... 11 1. Komputer PC od zewnątrz... 13 1.1. Elementy zestawu komputerowego... 13 1.2.
Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1 Spis treúci Przedmowa... 9 Wstęp... 11 1. Komputer PC od zewnątrz... 13 1.1. Elementy zestawu komputerowego... 13 1.2.
Procesory Blackfin. Część 1
 Procesory Blackfin. Część 1 Wykład 7 Projektowanie cyfrowych układów elektronicznych Mgr inż. Łukasz Kirchner lukasz.kirchner@cs.put.poznan.pl http://www.cs.put.poznan.pl/lkirchner Charakterystyka rodziny
Procesory Blackfin. Część 1 Wykład 7 Projektowanie cyfrowych układów elektronicznych Mgr inż. Łukasz Kirchner lukasz.kirchner@cs.put.poznan.pl http://www.cs.put.poznan.pl/lkirchner Charakterystyka rodziny
Technika mikroprocesorowa. Linia rozwojowa procesorów firmy Intel w latach
 mikrokontrolery mikroprocesory Technika mikroprocesorowa Linia rozwojowa procesorów firmy Intel w latach 1970-2000 W krótkim pionierskim okresie firma Intel produkowała tylko mikroprocesory. W okresie
mikrokontrolery mikroprocesory Technika mikroprocesorowa Linia rozwojowa procesorów firmy Intel w latach 1970-2000 W krótkim pionierskim okresie firma Intel produkowała tylko mikroprocesory. W okresie
PRZERWANIA. P1 - Procedura obslugi przerwania. Obsługa zdarzenia Z1 poprzez procedurę obsługi przerwania P1
 PRZERWANIA 1. Obsługa zdarzeń poprzez Obsługa polega na przerwaniu aktualnie wykonywanego procesu i wykonaniu procedury przypisanej danemu zdarzeniu gdy takie zdarzenie zajdzie. Procedura nazywa się procedurą
PRZERWANIA 1. Obsługa zdarzeń poprzez Obsługa polega na przerwaniu aktualnie wykonywanego procesu i wykonaniu procedury przypisanej danemu zdarzeniu gdy takie zdarzenie zajdzie. Procedura nazywa się procedurą
(Rysunek z książki T.Starecki. Mikokontrolery jednoukładowe rodziny 51. NOZOMI W-wa 1996)
") Przerwanie o wyższym priorytecie przerywa obsługę przerwania o niższym priorytecie, po czym następuje powrót do przerwanej obsługi przerwania o niższym priorytecie. (Rysunek z książki T.Starecki. Mikokontrolery
Przerwanie o wyższym priorytecie przerywa obsługę przerwania o niższym priorytecie, po czym następuje powrót do przerwanej obsługi przerwania o niższym priorytecie. (Rysunek z książki T.Starecki. Mikokontrolery
Budowa komputera. Magistrala. Procesor Pamięć Układy I/O
 Budowa komputera Magistrala Procesor Pamięć Układy I/O 1 Procesor to CPU (Central Processing Unit) centralny układ elektroniczny realizujący przetwarzanie informacji Zmiana stanu tranzystorów wewnątrz
Budowa komputera Magistrala Procesor Pamięć Układy I/O 1 Procesor to CPU (Central Processing Unit) centralny układ elektroniczny realizujący przetwarzanie informacji Zmiana stanu tranzystorów wewnątrz
Struktura i działanie jednostki centralnej
 Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
Architektura typu Single-Cycle
 Architektura typu Single-Cycle...czyli budujemy pierwszą maszynę parową Przepływ danych W układach sekwencyjnych przepływ danych synchronizowany jest sygnałem zegara Elementy procesora - założenia Pamięć
Architektura typu Single-Cycle...czyli budujemy pierwszą maszynę parową Przepływ danych W układach sekwencyjnych przepływ danych synchronizowany jest sygnałem zegara Elementy procesora - założenia Pamięć
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
PRZERWANIA. 1. Obsługa zdarzeń, odpytywanie i przerwania Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego.
 PRZERWANIA 1. Obsługa zdarzeń, odpytywanie i Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego. Istnieją dwie metody pozyskania informacji o zdarzeniach: 1. Cykliczne
PRZERWANIA 1. Obsługa zdarzeń, odpytywanie i Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego. Istnieją dwie metody pozyskania informacji o zdarzeniach: 1. Cykliczne
Układ sterowania, magistrale i organizacja pamięci. Dariusz Chaberski
 Układ sterowania, magistrale i organizacja pamięci Dariusz Chaberski Jednostka centralna szyna sygnałow sterowania sygnały sterujące układ sterowania sygnały stanu wewnętrzna szyna danych układ wykonawczy
Układ sterowania, magistrale i organizacja pamięci Dariusz Chaberski Jednostka centralna szyna sygnałow sterowania sygnały sterujące układ sterowania sygnały stanu wewnętrzna szyna danych układ wykonawczy
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2
 Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Architektura systemu komputerowego. Działanie systemu komputerowego. Przerwania. Obsługa przerwań (Interrupt Handling)
") Struktury systemów komputerowych Architektura systemu komputerowego Działanie systemu komputerowego Struktura we/wy Struktura pamięci Hierarchia pamięci Ochrona sprzętowa Architektura 2.1 2.2 Działanie
Struktury systemów komputerowych Architektura systemu komputerowego Działanie systemu komputerowego Struktura we/wy Struktura pamięci Hierarchia pamięci Ochrona sprzętowa Architektura 2.1 2.2 Działanie
Wprowadzenie. Dariusz Wawrzyniak. Miejsce, rola i zadania systemu operacyjnego w oprogramowaniu komputera
 Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Definicja systemu operacyjnego (1) Miejsce,
Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Definicja systemu operacyjnego (1) Miejsce,
Mikrokontrolery w mechatronice. Wykład 4
 Mikrokontrolery w mechatronice Wykład 4 Program wykładu nr 4: Wybrane architektury mikrokontrolerów - konstrukcje zaawansowane Programowanie mikrokontrolera w języku wysokiego poziomu - wprowadzenie kompatybilność
Mikrokontrolery w mechatronice Wykład 4 Program wykładu nr 4: Wybrane architektury mikrokontrolerów - konstrukcje zaawansowane Programowanie mikrokontrolera w języku wysokiego poziomu - wprowadzenie kompatybilność
Wprowadzenie. Dariusz Wawrzyniak. Miejsce, rola i zadania systemu operacyjnego w oprogramowaniu komputera
 Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Miejsce, rola i zadania systemu operacyjnego
Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Miejsce, rola i zadania systemu operacyjnego
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Systemy operacyjne. wykład dr Marcin Czarnota laboratorium mgr Radosław Maj
 Systemy operacyjne wykład dr Marcin Czarnota laboratorium mgr Radosław Maj Plan wykładów 1. Wprowadzenie, 2. Procesy, wątki i zasoby, 3. Planowanie przydziału procesora, 4. Zarządzanie pamięcią operacyjną,
Systemy operacyjne wykład dr Marcin Czarnota laboratorium mgr Radosław Maj Plan wykładów 1. Wprowadzenie, 2. Procesy, wątki i zasoby, 3. Planowanie przydziału procesora, 4. Zarządzanie pamięcią operacyjną,
USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip.
 1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
Budowa komputera. Magistrala. Procesor Pamięć Układy I/O
 Budowa komputera Magistrala Procesor Pamięć Układy I/O 1 Procesor to CPU (Central Processing Unit) centralny układ elektroniczny realizujący przetwarzanie informacji Zmiana stanu tranzystorów wewnątrz
Budowa komputera Magistrala Procesor Pamięć Układy I/O 1 Procesor to CPU (Central Processing Unit) centralny układ elektroniczny realizujący przetwarzanie informacji Zmiana stanu tranzystorów wewnątrz
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Systemy operacyjne. Wprowadzenie. Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak
 Wprowadzenie Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego
Wprowadzenie Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Architektura systemów komputerowych Laboratorium 14 Symulator SMS32 Implementacja algorytmów
 Marcin Stępniak Architektura systemów komputerowych Laboratorium 14 Symulator SMS32 Implementacja algorytmów 1. Informacje Poniższe laboratoria zawierają podsumowanie najważniejszych informacji na temat
Marcin Stępniak Architektura systemów komputerowych Laboratorium 14 Symulator SMS32 Implementacja algorytmów 1. Informacje Poniższe laboratoria zawierają podsumowanie najważniejszych informacji na temat
Przerwania w systemie mikroprocesorowym. Obsługa urządzeo wejścia/wyjścia
 Przerwania w systemie mikroprocesorowym 1 Obsługa urządzeo wejścia/wyjścia W każdym systemie mikroprocesorowym oprócz pamięci programu i pamięci danych znajduje się szereg układów lub urządzeo wejścia/wyjścia,
Przerwania w systemie mikroprocesorowym 1 Obsługa urządzeo wejścia/wyjścia W każdym systemie mikroprocesorowym oprócz pamięci programu i pamięci danych znajduje się szereg układów lub urządzeo wejścia/wyjścia,
LEKCJA TEMAT: Zasada działania komputera.
 LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
Działanie systemu operacyjnego
 Budowa systemu komputerowego Działanie systemu operacyjnego Jednostka centralna dysku Szyna systemowa (magistrala danych) drukarki pamięci operacyjnej I NIC sieci Pamięć operacyjna Przerwania Przerwania
Budowa systemu komputerowego Działanie systemu operacyjnego Jednostka centralna dysku Szyna systemowa (magistrala danych) drukarki pamięci operacyjnej I NIC sieci Pamięć operacyjna Przerwania Przerwania
XMEGA. Warsztaty CHIP Rok akademicki 2014/2015
 XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Systemy na Chipie. Robert Czerwiński
 Systemy na Chipie Robert Czerwiński Cel kursu Celem kursu jest zapoznanie słuchaczy ze współczesnymi metodami projektowania cyfrowych układów specjalizowanych, ze szczególnym uwzględnieniem układów logiki
Systemy na Chipie Robert Czerwiński Cel kursu Celem kursu jest zapoznanie słuchaczy ze współczesnymi metodami projektowania cyfrowych układów specjalizowanych, ze szczególnym uwzględnieniem układów logiki
Technika mikroprocesorowa I Wykład 2
 Technika mikroprocesorowa I Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci, -odczyt-zapis urządzenia we-wy,
Technika mikroprocesorowa I Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci, -odczyt-zapis urządzenia we-wy,
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2
 Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Architektura systemów komputerowych
 Studia stacjonarne inżynierskie, kierunek INFORMATYKA Architektura systemów komputerowych Architektura systemów komputerowych dr Artur Bartoszewski Procesor część I 1. ALU 2. Cykl rozkazowy 3. Schemat
Studia stacjonarne inżynierskie, kierunek INFORMATYKA Architektura systemów komputerowych Architektura systemów komputerowych dr Artur Bartoszewski Procesor część I 1. ALU 2. Cykl rozkazowy 3. Schemat
1. Wstęp Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE Rdzeń mikrokontrolerów ST7FLITE... 15
 3 1. Wstęp... 9 2. Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE... 11 3. Rdzeń mikrokontrolerów ST7FLITE... 15 3.1. Jednostka centralna...16 3.2. Organizacja i mapa pamięci...19 3.2.1. Pamięć RAM...20
3 1. Wstęp... 9 2. Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE... 11 3. Rdzeń mikrokontrolerów ST7FLITE... 15 3.1. Jednostka centralna...16 3.2. Organizacja i mapa pamięci...19 3.2.1. Pamięć RAM...20
>>> Techniki rozbudowy systemów wbudowanych >>> Systemy wbudowane. Name: Mariusz Naumowicz Date: 29 maja 2019 [~]$ _ [1/32]
![>>> Techniki rozbudowy systemów wbudowanych >>> Systemy wbudowane. Name: Mariusz Naumowicz Date: 29 maja 2019 [~]$ _ [1/32]](/thumbs/100/147379587.jpg ">>> Techniki rozbudowy systemów wbudowanych >>> Systemy wbudowane. Name: Mariusz Naumowicz Date: 29 maja 2019 [~]$ _ [1/32]") >>> Techniki rozbudowy systemów wbudowanych >>> Systemy wbudowane Name: Mariusz Naumowicz Date: 29 maja 2019 [~]$ _ [1/32] >>> Treści wykładu I 1. Systemy wbudowane 2. Podział procesorów 3. Tryby User
>>> Techniki rozbudowy systemów wbudowanych >>> Systemy wbudowane Name: Mariusz Naumowicz Date: 29 maja 2019 [~]$ _ [1/32] >>> Treści wykładu I 1. Systemy wbudowane 2. Podział procesorów 3. Tryby User
Działanie systemu operacyjnego
 Działanie systemu operacyjnego Budowa systemu komputerowego Jednostka centralna Sterownik dysku Sterownik drukarki Sterownik sieci Szyna systemowa (magistrala danych) Sterownik pamięci operacyjnej Pamięć
Działanie systemu operacyjnego Budowa systemu komputerowego Jednostka centralna Sterownik dysku Sterownik drukarki Sterownik sieci Szyna systemowa (magistrala danych) Sterownik pamięci operacyjnej Pamięć
RDZEŃ x86 x86 rodzina architektur (modeli programowych) procesorów firmy Intel, należących do kategorii CISC, stosowana w komputerach PC,
 procesorów firmy Intel, należących do kategorii CISC, stosowana w komputerach PC,") RDZEŃ x86 x86 rodzina architektur (modeli programowych) procesorów firmy Intel, należących do kategorii CISC, stosowana w komputerach PC, zapoczątkowana przez i wstecznie zgodna z 16-bitowym procesorem
RDZEŃ x86 x86 rodzina architektur (modeli programowych) procesorów firmy Intel, należących do kategorii CISC, stosowana w komputerach PC, zapoczątkowana przez i wstecznie zgodna z 16-bitowym procesorem
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
System czasu rzeczywistego
 System czasu rzeczywistego Definicje System czasu rzeczywistego (real-time system) jest to system komputerowy, w którym obliczenia prowadzone równolegle z przebiegiem zewnętrznego procesu mają na celu
System czasu rzeczywistego Definicje System czasu rzeczywistego (real-time system) jest to system komputerowy, w którym obliczenia prowadzone równolegle z przebiegiem zewnętrznego procesu mają na celu
UTK Można stwierdzić, że wszystkie działania i operacje zachodzące w systemie są sterowane bądź inicjowane przez mikroprocesor.
 Zadaniem centralnej jednostki przetwarzającej CPU (ang. Central Processing Unit), oprócz przetwarzania informacji jest sterowanie pracą pozostałych układów systemu. W skład CPU wchodzą mikroprocesor oraz
Zadaniem centralnej jednostki przetwarzającej CPU (ang. Central Processing Unit), oprócz przetwarzania informacji jest sterowanie pracą pozostałych układów systemu. W skład CPU wchodzą mikroprocesor oraz
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
LEKCJA TEMAT: Współczesne procesory.
 LEKCJA TEMAT: Współczesne procesory. 1. Wymagania dla ucznia: zna pojęcia: procesor, CPU, ALU, potrafi podać typowe rozkazy; potrafi omówić uproszczony i rozszerzony schemat mikroprocesora; potraf omówić
LEKCJA TEMAT: Współczesne procesory. 1. Wymagania dla ucznia: zna pojęcia: procesor, CPU, ALU, potrafi podać typowe rozkazy; potrafi omówić uproszczony i rozszerzony schemat mikroprocesora; potraf omówić
Architektura typu multi cycle
 PC ux ress Write data emdata [3-26] [25-2] [2-6] [5-] register [5-] Cond IorD em emwrite emtoreg IRWrite [25-] [5-] Outputs Control Op [5-] ux ux PCSource Op SrcB Src RegWrite RegDst register register
PC ux ress Write data emdata [3-26] [25-2] [2-6] [5-] register [5-] Cond IorD em emwrite emtoreg IRWrite [25-] [5-] Outputs Control Op [5-] ux ux PCSource Op SrcB Src RegWrite RegDst register register
organizacja procesora 8086
 Systemy komputerowe Procesor 8086 - tendencji w organizacji procesora organizacja procesora 8086 " # $ " % strali " & ' ' ' ( )" % *"towego + ", -" danych. Magistrala adresowa jest 20.bitowa, co pozwala
Systemy komputerowe Procesor 8086 - tendencji w organizacji procesora organizacja procesora 8086 " # $ " % strali " & ' ' ' ( )" % *"towego + ", -" danych. Magistrala adresowa jest 20.bitowa, co pozwala
Mikroprocesory rodziny INTEL 80x86
 Mikroprocesory rodziny INTEL 80x86 Podstawowe wła ciwo ci procesora PENTIUM Rodzina procesorów INTEL 80x86 obejmuje mikroprocesory Intel 8086, 8088, 80286, 80386, 80486 oraz mikroprocesory PENTIUM. Wprowadzając
Mikroprocesory rodziny INTEL 80x86 Podstawowe wła ciwo ci procesora PENTIUM Rodzina procesorów INTEL 80x86 obejmuje mikroprocesory Intel 8086, 8088, 80286, 80386, 80486 oraz mikroprocesory PENTIUM. Wprowadzając
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Architektura systemów komputerowych. dr Artur Bartoszewski
 Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Budowa Mikrokomputera
 Budowa Mikrokomputera Wykład z Podstaw Informatyki dla I roku BO Piotr Mika Podstawowe elementy komputera Procesor Pamięć Magistrala (2/16) Płyta główna (ang. mainboard, motherboard) płyta drukowana komputera,
Budowa Mikrokomputera Wykład z Podstaw Informatyki dla I roku BO Piotr Mika Podstawowe elementy komputera Procesor Pamięć Magistrala (2/16) Płyta główna (ang. mainboard, motherboard) płyta drukowana komputera,
Komputery klasy PC. Dariusz Chaberski
 Komputery klasy PC Dariusz Chaberski Start systemu adres 0xFFFF:0x0000 POST (ang. Power On Self Test) sprawdzenie zmiennej BIOSu 0x0040:0x0072-0x1234 - zimny start (RESET, włączenie zasilania), gorący
Komputery klasy PC Dariusz Chaberski Start systemu adres 0xFFFF:0x0000 POST (ang. Power On Self Test) sprawdzenie zmiennej BIOSu 0x0040:0x0072-0x1234 - zimny start (RESET, włączenie zasilania), gorący
Komputer IBM PC niezależnie od modelu składa się z: Jednostki centralnej czyli właściwego komputera Monitora Klawiatury
 1976 r. Apple PC Personal Computer 1981 r. pierwszy IBM PC Komputer jest wart tyle, ile wart jest człowiek, który go wykorzystuje... Hardware sprzęt Software oprogramowanie Komputer IBM PC niezależnie
1976 r. Apple PC Personal Computer 1981 r. pierwszy IBM PC Komputer jest wart tyle, ile wart jest człowiek, który go wykorzystuje... Hardware sprzęt Software oprogramowanie Komputer IBM PC niezależnie
Procesory osadzone ETD Wprowadzenie W
 Procesory osadzone ETD 7211 Wprowadzenie W1 8.10.2018 Informacje Prowadzący: mgr inż. Maciej Rudek Konsultacje: Strona kursu: Poniedziałek: 11 00-13 00 Środa: 11 00-13 00 http://www.w12.pwr.wroc.pl/mikro/
Procesory osadzone ETD 7211 Wprowadzenie W1 8.10.2018 Informacje Prowadzący: mgr inż. Maciej Rudek Konsultacje: Strona kursu: Poniedziałek: 11 00-13 00 Środa: 11 00-13 00 http://www.w12.pwr.wroc.pl/mikro/
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Układy czasowo-licznikowe w systemach 80x86
 Układy czasowo-licznikowe w systemach 80x86 Semestr zimowy 2014/2015, WIEiK-PK 1 Układy czasowo-licznikowe w systemach 80x86 W komputerach osobistych oprogramowanie w szczególności, jądro systemu musi
Układy czasowo-licznikowe w systemach 80x86 Semestr zimowy 2014/2015, WIEiK-PK 1 Układy czasowo-licznikowe w systemach 80x86 W komputerach osobistych oprogramowanie w szczególności, jądro systemu musi
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Cwiczenie nr 1 Pierwszy program w języku C na mikrokontroler AVR
 Cwiczenie nr 1 Pierwszy program w języku C na mikrokontroler AVR Zadanie polega na napisaniu pierwszego programu w języku C, jego poprawnej kompilacji i wgraniu na mikrokontroler. W tym celu należy zapoznać
Cwiczenie nr 1 Pierwszy program w języku C na mikrokontroler AVR Zadanie polega na napisaniu pierwszego programu w języku C, jego poprawnej kompilacji i wgraniu na mikrokontroler. W tym celu należy zapoznać
Technika mikroprocesorowa
 Technika mikroprocesorowa zajmuje się przetwarzaniem danych w oparciu o cyfrowe programowalne układy scalone. Systemy przetwarzające dane w oparciu o takie układy nazywane są systemami mikroprocesorowymi
Technika mikroprocesorowa zajmuje się przetwarzaniem danych w oparciu o cyfrowe programowalne układy scalone. Systemy przetwarzające dane w oparciu o takie układy nazywane są systemami mikroprocesorowymi