Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel dmakow@dmcs.pl
|
|
|
- Aleksandra Popławska
- 9 lat temu
- Przeglądów:
Transkrypt
1 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel dmakow@dmcs.pl 1

2 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium Rodzina procesorów ARM Urządzenia peryferyjne Interfejsy w systemach wbudowanych Pamięci i dekodery adresowe Programy wbudowane na przykładzie procesorów ARM Metodyki projektowania systemów wbudowanych Systemy czasu rzeczywistego 2

3 Interfejsy w systemach wbudowanych 3
4 Pamięć komputerowa to urządzenie elektroniczne lub mechaniczne służące do przechowywania danych i programów (systemu operacyjnego oraz aplikacji). Urządzenia zewnętrzne, peryferyjne (ang. Peripheral Device) Urządzenia elektroniczne dołączone do procesora przez magistrale systemową lub interfejs. Urządzenia zewnętrzne wykorzystywane są do realizowania specjalizowanej funkcjonalności systemu. Magistrala (ang. bus) Połączenie elektryczne umożliwiające przesyłanie danym pomiędzy procesorem, pamięcią i urządzeniami peryferyjnymi. Magistra systemowa zbudowane jest zwykłe z kilkudziesięciu połączeń elektrycznych (ang. Parallel Bus) lub szeregowego połączenia (ang. Serial Bus). Interface (ang. Interface) Urządzenie elektroniczne lub optyczne pozwalające na komunikację między dwoma innymi urządzeniami, których bezpośrednio nie da się ze sobą połączyć. 4
 Połączenie elektryczne umożliwiające przesyłanie danym pomiędzy procesorem, pamięcią i urządzeniami peryferyjnymi.")
5 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ARM: Interfejs równoległy PIO (zwykle 32 bity), Interfejsy szeregowe: Interfejs DBGU - zgodny ze standardem EIA RS232, Interfejs uniwersalny USART, Interfejs Serial Peripheral Interface (SPI), Interfejs Synchronous Serial Controller (SSC) Interfejs I2C, Interfajs Two-wire Interface (TWI), Interfejs Controlled Area Network (CAN), Interfejs Universal Serial Bus (USB), Interfejs Ethernet 10/100. 5
, Interfejs Controlled Area Network (CAN), Interfejs Universal Serial Bus (USB), Interfejs")
6 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 6

7 Interfejs szeregowy EIA RS232 7

8 Transceiver UART Rejestr przesuwny D0-D7 Nadajnik TxD Clk D0-D7 Odbiornik RxD Clk 8

9 Ramka danych transmitera UART (1) Mark Space 9
")
10 Ramka danych transmitera UART (2) Przesylana dana: b = 0x4B 10

11 Transmisja synchroniczna vs asynchroniczna? Systemy wbudowane 11

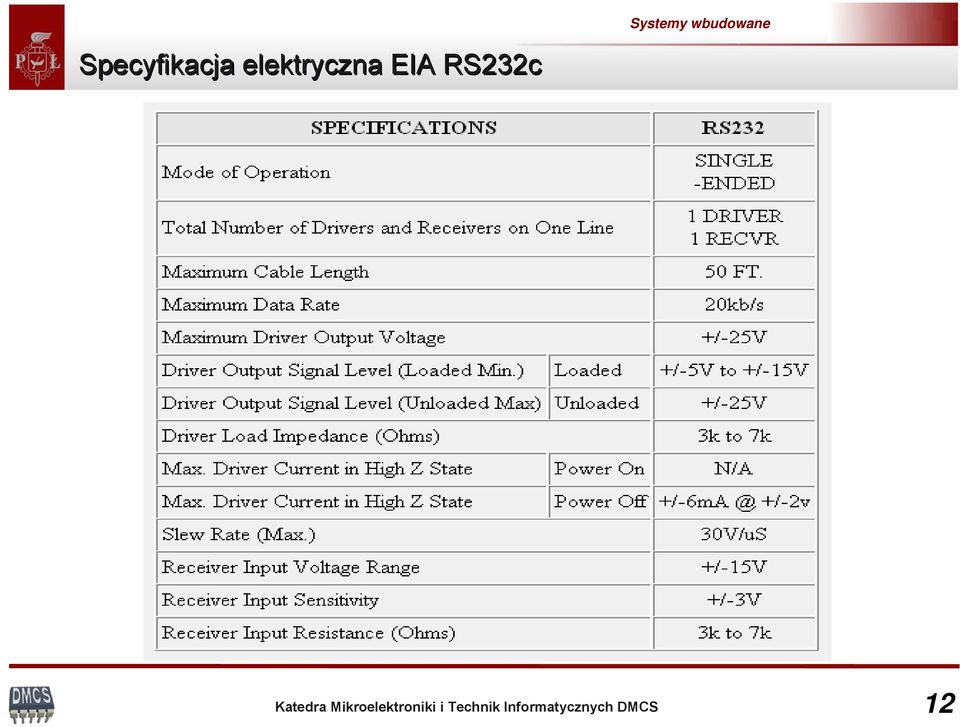
12 Specyfikacja elektryczna EIA RS232c 12
13 Kabel null-modem EIA

14 Dodatkowe linie sterujące Hardware Flow Control DTE (ang. Data Terminal Equipment) - urządzenie do przetwarzania danych (końcowe, np. komputer) DCE (ang. Data Circuit-terminating Equipment) urządzenie do trans. danych (np. Modem) DSR - Data Set Ready - gotowość modemu DTR - Data Terminal Ready - gotowość terminala RTS - Request to Send Data - żądanie wysyłania CTS - Clear to Send - gotowość wysyłania 14
 DSR - Data Set Ready - gotowość modemu DTR - Data Terminal Ready - gotowość terminala RTS -")
15 Pełny kabel null-modem 15

16 Poziomy napięć określone przez standard EIA 232 Wyjście procesora Standard EIA RS

17 Konwerter poziomów napięć MAX 232 (5 V) MAX 3232 (3,3 V) 17
 MAX 3232")
18 Programy do komunikacji z wykorzystaniem standardu EIA RS232 Program Hyper terminal Program minicom Program ssh Program Terminal ( 18

19 AT91SAM9263 moduł diagnostyczny DBGU (rozdział 30) 19

20 Port szeregowy jako interfejs diagnostyczny Cechy portu diagnostycznego DBGU (DeBuG Unit): Asynchroniczna transmisja danych zgodna ze standardem RS232 (8 bitów danych, jeden bit parzystości z możliwością wyłączenia), Możliwość zgłaszania przerwań systemowych współdzielonych (PIT, RTT, WDT,DMA, PMC, RSTC, MC), Azaliza poprawności odebranych ramek, Sygnalizacja przepełnionego bufora TxD lub RxD, Trzy tryby diagnostyczne: zdalny loopback, lokalny loopback oraz echo, Maksymalna szybkość transmisji rzędu 1 Mbit/s, Możliwość komunikacji z rdzeniem procesora COMMRx/COMMTx. 20

21 Schemat blokowy portu DBGU procesora ARM 9 Systemy wbudowane Wyprowadzenia procesora Transceiver szeregowy Sygnał przerwnia SYS 21
22 Szybkość transmisji Generator sygnału zegarowego odpowiedzialnego za szybkość transmisji (ang. Baud Rate). Szybkość transmisji danych wyrażona jest wzorem: Baud Rate = MCK / (16 x CD), gdzie CD (Clock Divisor) jest polem rejestru DBGU_BRGR 22
23 Błędy podczas transmisji danych Systemy wbudowane Przepełnienie bufora odbiorczego BGU_RHR (ang. Buffer Overflow) Błąd parzystości (ang. Parity Error) Błąd ramki (ang. Frame Error) 23
24 Konfiguracja portu DBGU static void Open_DBGU (void){ } 1. Wyłącz przerwania od portu DBGU, rejestr AT91C_BASE_DBGU->DBGU_IDR 2. Resetuj i wyłącz odbiornik AT91C_BASE_DBGU->DBGU_CR 3. Resetuj i wyłącz nadajnik AT91C_BASE_DBGU->DBGU_CR 4. Konfiguracja portów wejścia-wyjścia jako porty RxD i TxD DBGU, rejestry AT91C_BASE_PIOC->PIO_ASR oraz AT91C_BASE_PIOC->PIO_PDR 5. Konfiguracja szybkości transmisji portu szeregowego AT91C_BASE_DBGU->DBGU_BRGR 6. Konfiguracja trybu pracy, tryb normalny bez przystości (8N1), rejestr AT91C_BASE_DBGU->DBGU_MR, flagi AT91C_US_CHMODE_NORMAL, AT91C_US_PAR_NONE; 7. Skonfiguruj przerwania jeżeli są wykorzystywane: Open_DBGU_INT() 8. Włącz odbiornik, rejestr AT91C_BASE_DBGU->DBGU_CR 9. Włącz nadajnik, rejestr AT91C_BASE_DBGU->DBGU_CR 24
25 Odczyt i zapis danych do portu DBGU void dbgu_print_ascii (const char *Buffer) { } while ( data_are_in_buffer ) { while ( TXRDY... ){}; /* wait intil Tx buffer busy check TXRDY flag */ DBGU_THR =... /* write a single char to Transmitter Holding Register */ } void dbgu_read_ascii (const char *Buffer, unsigned int Size){ do { While (...RXRDY... ){}; /* wait until data available */ Buffer[...] = DBGU_RHR; /* read data from Receiver Holding Register */ } while ( read_enough_data... ) } 25
26 AT91SAM9263 USART (rozdział 34) 26
27 Port szeregowy USART Cechy portu USART (Universal Synch. Asynch. Receiver-Transmitter): Asynchroniczna lub transmisja danych, Programowalna długość ramki, kontrola parzystości, liczba bitów stopu, Możliwość zgłaszania przerwań systemowych współdzielonych (PIT, RTT, WDT,DMA, PMC, RSTC, MC), Analiza poprawności odebranych ramek, Sygnalizacja przepełnionego bufora TxD lub RxD, Możliwość odbierania ramek o zmiennej długości wykorzystanie dodatkowego licznika do odmierzania czasu, Trzy tryby diagnostyczne: zdalny loopback, lokalny loopback oraz echo, Maksymalna szybkość transmisji rzędu 1 Mbit/s, Wsparcie sprzętowej kontroli przepływu danych, Możliwość transmisji w systemie Multidrop, transmisja danej i adresu, Możliwość transmisji danych z wykorzystaniem kanału DMA (Direct Memory Access), Wsparcie dla standardu transmisji różnicowej RS485 oraz systemów pracujących w zakresie podczerwieni (wbudowany modulator-demodulator IrDA). 27
28 Schemat blokowy transceivera USART 28
29 Buforowanie danych 29
30 Struktura stosu (1) Stos (ang. stack lub LIFO Last-In, First-Out) - liniowa struktura danych, w której dane odkładane są na wierzch stosu i z wierzchołka stosu są zdejmowane. Ideę stosu danych można zilustrować jako stos położonych jedna na drugiej książek nowy egzemplarz kładzie się na wierzch stosu i z wierzchu stosu zdejmuje się kolejne egzemplarze. Elementy stosu poniżej wierzchołka stosu można wyłącznie obejrzeć, aby je ściągnąć, trzeba najpierw po kolei ściągnąć to, co jest nad nimi FIFO (ang. First In, First Out) - przeciwieństwem stosu LIFO jest kolejka, bufor typu FIFO (pierwszy na wejściu, pierwszy na wyjściu), w którym dane obsługiwane są w takiej kolejności, w jakiej zostały dostarczone (jak w kolejce do kasy) 30
31 Kolejka FIFO (1) Dane do kolejki FIFO mogą być wpisywane przez kilka niezależnych aplikacji, wątków lub urządzeń. W takiej sytuacji dostęp do kolejki kontrolowany jest przez Semafor (zmienna globalna). Dane zgomadzone w kolejce wysyłane są w kolejności w jakiej zostały wpisane. 31
32 Kolejka FIFO (2) Dane w kolejce FIFO Adres w pamięci: 0xffD50 0xffD50 + size -1 Tail Head Zapis danej do kolejki FIFO: Zwiększ wskaźnik Head o jeden, zapisz daną. Odczyt danej z kolejki FIFO: Odczytaj daną, zwiększ wskaźnik Tail o 1. W przypadku, gdy Tail lub Head wskazuje na ostatni dostępny elemet kolejki zamiast inkrementacji wskaźnik jest zerowany. Pozwala to na płynne przesuwanie wskaźników bufor kołowy (ang. circular buffer). 32
33 Kolejka FIFO (3) Kolejka pusta T = H T H Dane w kolejce, ilość danych = H T T H Brak miejsca w kolejce (T = 0) & (H = Size) lub T H = 1 T H H T 33
34 Kolejka FIFO implementacja w C (1) #define BUFFERSIZE 0xFF /* FIFO buffer size and mask */ typedef struct FIFO { }; char buffer [BUFFERSIZE+1]; int head; int tail; void FIFO_Init (struct FIFO *Fifo); void FIFO_Empty (struct FIFO *Fifo); int FIFO_Put (struct FIFO *Fifo, char Data); int FIFO_Put (struct FIFO *Fifo, char *Data); void FIFO_Init (struct FIFO *Fifo){ Fifo->head=0; Fifo->tail=0; } /* optional: initialize data in buffer with 0 */ 34
35 Kolejka FIFO implementacja w C (2) void FIFO_Empty (struct FIFO *Fifo){ } Fifo->head = Fifo->tail; int FIFO_Put (struct FIFO *Fifo, char Data){ } if ((Fifo->tail-Fifo->head)==1 (Fifo->tail-Fifo->head)==BUFFERSIZE)){ /* now FIFO is empty*/ return -1; }; /* FIFO overflow */ Fifo->buffer[Fifo->head] = Data; Fifo->head = Fifo->head++ & BUFFERSIZE; return 1; /* Put 1 byte successfully */ int FIFO_Get (struct FIFO *Fifo, char *Data){ } If ((Fifo->head!=Fifo->tail)){ *Data = Fifo->buffer[Fifo->tail]; Fifo->tail = Fifo->tail++ & BUFFERSIZE; return 1; /* Get 1 byte successfully */ } else return -1; /* No data in FIFO */ 35
36 Serial Peripheral Interface 36
37 Serial Peripheral Interface Cechy interfejsu SPI: Szeregowa transmisja synchroniczna, Transfer full duplex, master-slave lub master-multi-slave, Duża szybkość transmisji (>12 Mbit/s), Zastosowanie: układy peryferyjne (ADC, DAC, RTC, EEPROM, termometry, itp), sterowanie pomocnicze (matryca CCD z szybkim interfejsem równoległym), karty pamięci z interfejsem szeregowym SD/SDHC/MMC. 37
38 Serial Peripheral Interface Systemy wbudowane Master Output Slave Input Master Input Slave Output Master CS Slave 38
39 Protokół interfejsu SPI Systemy wbudowane Konfiguracja sygnału zegarowego: Polaryzacja zegara: Polaryzacja ujemna CPOL = 0 (stan niski, 8 impulsów zegara), Polaryzacja dodatnia CPOL = 1 (stan wysoki, 8 ujemnych impulsów zegara). Faza zegara: Zerowa faza zegara (próbkowanie na pierwszym zboczu zegara), Opóźniona faza zegara (próbkowanie na drugim zboczu zegara). 39
40 Termometr z interfasem SPI TMP 121: Obudowa SOT 23-6, fclk mak. = 15 MHz Interfejs: SPI-Compatible Interface Rozdzielczość: 12-Bit + Sign, 0,0625 C Dokładność: ±1.5 C od 25 C do +85 C Pobór prądu w stanie uśpienia: 50µA (mak.) Zasilanie: 2,7V to 5,5V 3 mm 40
41 Ramka SPI termometru TMP121 41
42 Moduł SPI procesora ARM AT91SAM9263 (1) Systemy wbudowane Cechy modułu SPI: Obsługa transferów w trybie Master lub Slave, Bufor nadawczy, odbiorczy oraz bufor transceivera, Transfery danych od 8 do 16 bitów, Cztery programowalne wyjścia aktywujące urządzenia dołączone do SPI (obsługa do 15 urządzeń), Programowalne opóźnienia pomiędzy transferami, Programowalna polaryzacja i faza zegara. 42
43 Moduł SPI procesora ARM AT91SAM9263 (2) Systemy wbudowane 43
44 Moduł SPI procesora ARM (3) 44
45 Magistrala I2C 45
46 Magistrala I2C Standard opracowany przez firmę Philips na początku lat 80, Dwuprzewodowy interfejs synchroniczny (SDA linia danych, SCL linia zegara), Transmisja dwukierunkowa, typu master-slave (multi-master), ramki 8-bitowe, Szybkość transmisji: 100 kbps (standard mode), 400 kbps (fast mode), 3,4 Mbps (high-speed mode), Urządzenia posiadają niepowtarzalne adresy (7-bitów lub 10-bitów), Synchronizacja przy pomocy sygnału zegarowego umożliwia pracę urządzeń komunikujących się z różnymi szybkościami, Liczba urządzeń dołączonych do magistrali ograniczona jest pojemnością mag. (400 pf), Mechanizmy arbitrażu umożliwiające uniknięcie kolizji i utraty danych. 46
47 Zastosowanie interfejsu I2C W sprzedaży dostępnych jest wiele bardzo tanich układów scalonych sterowanych poprzez I²C: PCF8563/ zegar, kalendarz, alarm, timer, dodatkowo może służyć jako RAM PCF pseudo-dwukierunkowy 8-bitowy ekspander PCF8576, PCF sterowniki wyświetlaczy LCD PCF pamięć EEPROM 256 bajtów (1, 2, 4 kb,... MB) PCF bitowy, 4-kanałowy przetwornik analogowo-cyfrowy i cyfrowo- analogowy 47
48 Magistrala I2C Urządzenie nadrzędne (Master) inicjuje transmisję, generuje sygnał zegarowy Urządzenie podrzędne (Slave) analizuje wysłany przez urządzenie adres i transmituje lub odbiera dane. 48
49 Rozpoczęcie oraz zakończenie transmisji Rozpoczęcie transmisji generacja sygnału START (opadające zbocze na szynie SDA, zmiana stanu z 1 na 0 logiczne, podczas ważnego sygnału SCL = 1 ). Sygnał generuje Master. Zakończenie transmisji generacja sygnału STOP (narastające zbocze na szynie SDA, zmiana stanu z 0 na 1 logiczną,podczas ważnego sygnału SCL = 1 ). Sygnał generuje Master. 49
50 Protokół I2C A) Transmisje rozpoczyna Master generując sygnał START. B) Następnie transmituje 8 bitów danych (7 bitów adresowych, bit R/W). C) Po transmisji 8 bitów Slave przejmuje magistralę i wymusza odpowiedni poziom na linii SDA (9 takt zegara). Odpowiada w ten sposób bitem potwierdzenia ACK (brak potwierdzenia, ACK = 1 ). E) Po przesłaniu adresu następuje faza odczytu lub zapisu danej do obsługiwanego urządzenia (8 bitów danych). F) Po przesłaniu danych urządzenie nadrzędne kończy transmisję generując brak potwierdzenia (ACK = 1 ) oraz bit stopu. 50
51 Zapis lub odczyt Zapis n-bajtów danych 7-bit Odczyt n-bajtów danych 7-bit 51
52 Two-Wire Interface standard zgodny z I2C? Systemy wbudowane Moduł TWI procesorów ARM jest odpowiednikiem standardu opracowanego przez firmę Philips (firma Philips posiada patent na interfejs I2C). Cechy interfejsu SWI procesora AMR firmy ATMEL: Zgodny ze standardem I2C, Praca w trybie Master, Multimaster lub Slave, Umożliwia dołączenie urządzeń zasilanych napięciem 3,3 V, Transmisja danych z częstotliwością zegara do 400 khz, Transfery poszczególnych bajtów wyzwalane przerwaniami, Automatycznie przejście do trybu Slave w przypadku kolizji na magistrali (Arbitration-lost interrupt), Przerwanie zgłaszane, gdy zostanie wykryty adres urządzenia w trybie Slave, Automatyczne wykrywanie stanu zajętością magistrali, Obsługa adresów 7 i 10-cio bitowych. 52
53 Schemat blokowy modułu TWI 53
54 54
55 Zegar czasu rzeczywistego 55
56 Transmisja z wykorzystaniem interfejsu I2C 56
57 Interfejsy szeregowe - podsumowanie 100 m 10 m 1 m EIA RS cm I2C SPI 1 cm 1 kbps 10 kbps 100 kbps 1 Mbps 10 Mbps 100 Mbps 57
58 Magistrala USB (Universal Serial Bus) 58
59 Magistrala USB 59
60 Automatyczna detekcja dołączenia/odłączenia urządzenia oraz automatyczna konfiguracja, Pojedyncze, ustandaryzowane złącze, Możliwość dołączenia do 127 urządzeń do magistrali, Automatyczna detekcja i korekcja błędów, Szybkość transmisji danych: LOW 1.5 Mb/s, specyfikacja USB >1.1, FULL 12 Mb/s, specyfikacja USB >1.1, HIGH 480 Mb/s, specyfikacja USB 2.0, Specyfikacja USB 3.0 => 5 Gb/s. 60
61 Struktura warstwowa magistrali USB Magistrala USB zbudowana jest na bazie architektury typu gwiazda. Model systemu USB składa się z trzech warstw: warstwa fizyczna, warstwa logiczna, warstwa funkcjonalna. 61
62 Przepływ danych w systemie USB Wirtualne kanały (ang. Pipe) Kanał sterujący (EP0) oraz Kanały danych EP1 EP30 (ang. End Points) 62
63 Warstwa fizyczna Transmisja różnicowa, typu half-duplex. Dwa dodatkowe przewody zasilające 5 V/500 ma Złącza typu mini USB Złącza USB typu A i B 63
64 Zależności czasowe ramek USB 64
65 Rodzaje transferów 65
66 Transfer przerwaniowy i masowy 66
67 Transfer izochroniczny 67
68 Transfer sterujący 68
69 Proces konfiguracji Enumeracja (ang. Enumeration) konfiguracja urządzeń przeprowadzana po dołączeniu lub odłączeniu nowego urządzenia od magistrali. Proces konfiguracji przeprowadzany jest przez urządzenie nadrzędne (Master). Master przypisuje indywidualne adresy do urządzeń oraz ustanawia podstawowe parametry transmisji: Adres urządzenia w przestrzeni USB, Rodzaj transferu, Kierunek transmisji danych (read, write, read-write), Rozmiar przesyłanych pakietów, Szybkość transmisji, Adresy buforów używanych przez sterowniki urządzenia, Prąd pobierany przez urządzenie. 69
70 Koncentratory USB 70
71 Konwerter USB - I2C 71
72 Konwerter EIA 232-USB 72
73 USB i procesory ColdFire a USB Low\Full speed: MCF 527X (72-75) MCF 5221X (72-75) MCF 5222X (72-75) MCF 527X (72-73) 68HCS08JW MHz 80 MHz 80 MHz 240 MHz 8 MHz High Speed: MCF 547X (72-75) MCF 548X (82-85) MCF 537X (77-79) MCF MHz MHz 240 Mhz 140 MHz 73
74 Motorola 68HC908JW32 Cechy modułu USB procesora HC908: Interfejs zgodny ze standardem USB 2.0 full speed, 12 Mbps data rate, Wbudowany stabilizator napięcia 3.3 V, Endpoint 0 wyposażony w 8-bytowy bufor nadawczy i odbiorczy 64 bajtowy bufor endpoint współdzielony przez bufory końcowe
75 Procesor Cypress CY7C68013A Cechy procesora CY7C68013: Interfejs zgodny ze standardem USB 2.0 USB-IF high speed, Rozbudowane jądro procesora rodziny 8051, Zintegrowana pamięć programu 16 kb (RAM) Pamięć ładowana z USB, Pamięć ładowana z zewnętrznej pamięci EEPROM. Cztery programowalne bufory końcowe (BULK/INTERRUPT/ISOCHRONOUS) Dodatkowy 64 bajtowy endpoint (BULK/INTERRUPT), 8- lub 16-bitowy interfejs zewnętrzny, Kanał DMA, GPIF (General Programmable Interface) 75
76 Procesor Cypress CY7C68013A 76
77 77
78 USB 3.0 Interfejs szeregowy, full-duplex Szybkość transmisji danych: 5 Gb/s (10 razy szybciej niż USB 2.0) Standard kompatybilny z USB 2.0 (sterowniki i złącza), jednak znacznie różniący się od USB 2.0 Transmisja danych full-duplex, zasilanie Inteligentne zarządzanie poborem energii, mniejsze zużycie energii Warstwa łącza danych i fizyczna podobna do interfejsu PCI express
79 Warstwa fizyczna USB
80 Sterowniki urządzeń peryferyjnych 80
81 Sterowniki urządzeń (1) Sterownik urządzenia (ang. driver) - program lub fragment programu odpowiadający za dane urządzenie i pośredniczący pomiędzy nim, a resztą systemu komputerowego. Sterownik zwykle traktowany jest jako zestaw funkcji przeznaczonych do obsługi urządzenia peryferyjnego. Sterownik odwzorowuje pewne cechy urządzenia. Nazewnictwo funkcji oraz parametry przyjmowane i zwracane przez funkcje są zwykle narzucone przez system operacyjny. Sterowniki urządzeń dostępne w systemach operacyjnych udostępniają programiście interfejs API (Application Programing Interface), bezpośredni dostęp do urządzenia jest zabroniony. W przypadku systemów wbudowanych aplikacje mogą się bezpośrednio odwoływać do urządzeń, czasami trudno jest odróżnić aplikację od sterownika. 81
82 Sterowniki urządzeń (2) Sterownik urządzenia peryferyjnego (urządzenia peryferyjne wewnętrzne i zewnętrzne) udostępnia podstawowe funkcje pozwalające na łatwe korzystanie z danego urządzenia. Sterownik urządzenia pozwala programiście ukryć dane urządzenie dostarczając tylko zestaw funkcji umożliwiających sterowanie oraz wymianę danych z danym urządzeniem. Pisząc sterownik urządzenia musimy pamiętać o procedurach obsługujących przerwania. Aplikacja Aplikacja Driver RTC1 Przerwanie Driver RTC2 Przerwanie Zegar czasu Rzeczywistego BQ3285 Zegar czasu Rzeczywistego BQ4285 Zmiana hardware'u nie wymaga modyfikacji aplikacji 82
83 Sterowniki inicjalizacja urządzeń Sterownik urządzenia peryferyjnego - zwykle implementowane są następujące funkcje: Device_Open () - funkcja wykorzystywana do inicjalizacji urządzenia. Funkcja może przyjmować parametry jeżeli sterownik obsługuje więcej niż jedno urządzenie, np. dwa porty USART, których rejestry są dostępne pod innymi adresami bazowymi. Funkcja może zwrócić wynik operacji związanej z inicjalizacją urządzenia lub deskryptor (wskaźnik) dający dostęp do danego urządzenia (do rejestrów urządzenia lub struktury umożliwiającej komunikację z nim). Sterownik urządzenia może zostać otworzony przez kilka różnych aplikacji. W takim przypadku należy zaimplementować, tzw. licznik odwołań do urządzenia. Licznik odwołań zwiększany jest przy każdym wywołaniu funkcji Open. Inicjalizacja urządzenia przeprowadzana jest tylko jeden raz. Device_Close () - funkcja wywoływana, gdy aplikacja przestaje korzystać z danego urządzenia. Zadaniem funkcji jest bezpieczne wyłączenie urządzenia, np. w przypadku portów IO konfiguracja jako porty wejściowe, USART wyłączenie nadajnika/odbiornika, zamaskowanie przerwań. Jeżeli funkcja Open została wykonana kilka razy, z urządzenia korzysta kilka aplikacji, należy jedynie zdekrementować licznik odwołań. Urządzenie wyłączane jest w przypadku, gdy licznik odwołań zmniejszy się do 0. Podobnie do funkcji Open, funkcja może przyjmować parametry oraz zwracać rezultat operacji. Funkcje Open i Close powinny również konfigurować przerwania skojarzone z danym urządzeniem peryferyjnym. 83
84 Sterowniki komunikacja z urządzeniami ReadData Device_Read () - funkcja wykorzystywana do odczytywania danych z urządzenia, np. portu szeregowego. Funkcja do odczytu danych może być funkcją blokująca lub nie. Funkcja blokująca czeka, aż dane będą dostępne (możliwe jest wcześniejsze opuszczenie funkcji jeżeli upłynie określony okres czasu, a danych nadal nie ma - timeout). Timeout jest zwykle obliczany przez jeden z timerów procesora. W takim przypadku procesor czekając na nadejście danych może wykonywać inne obliczenia. Funkcja Read może również korzystać z przerwań lub kanału DMA (Direct Memory Access). W takim przypadku dane wpisywane są do bufora. Gdy zgromadzi się odpowiednio duża ilość danych ustawiana jest flaga informująca o ich nadejściu lub zgłaszane jest przerwanie systemowe. Device_Write () - funkcja wykorzystywana do zapisywania danych do urządzenia, np. do portu szeregowego. Funkcja do odczytu danych może być funkcją blokująca lub nie. Funkcja blokująca czeka, aż dane zostaną wysłane. Transmisja danych przez port szeregowy również zajmuje dużo czasu (przesłanie 1 znaku z szybkością 9600 bit/s zajmuje około 1 ms). W takim przypadku dane zgromadzone w buforze mogą być przesyłane przy wykorzystaniu przerwania funkcja nieblokująca. Funkcja ustawia flagę informująca o zakończeniu transmisji. Wykorzystanie kanału DMA znacznie przyśpiesza wykonanie operacji. Funkcje mogą zwracać rezultat wykonane operacji, np. przesłanie danych przez port USART wymaga potwierdzenia poprawności ich odbioru. W takim przypadku po wysłaniu danych uruchamiany jest odbiornik, który czeka na przesłanie potwierdzenia zgodnego w użytym protokołem transmisji danych. 84
85 Sterowniki funkcje pomocnicze DeviceStatus DeviceStatus () - funkcja wykorzystywana do odczytywania statusu urządzenia, np. sprawdzanie flagi Timer'a, USART'a, itp... może zostać wywołana przez inną funkcję sterownika lub aplikację. Wywołanie może nastąpić w funkcji blokującej (polling - ciągłe sprawdzanie stanu urządzenia funkcja czeka na ustawienie lub wyzerowanie flagi) lub nieblokującej (sprawdzanie stanu wywoływane w funkcji przerwania). Device_INT_Handler() - funkcja obsługująca przerwania od urządzeń peryferyjnych, np. handler do timer'a PIT. Device_WriteString () - funkcja wykorzystywana do zapisywania ciągu znaków do urządzenia. Funkcja korzysta z funkcji Device_Write() zapisującej pojedynczy znak. Funkcja dziedziczy własności blokujące po funkcji niższego poziomu. 85
86 Przykładow struktury sterowników systemu mikroprocesorowego Inicjalizacja urządzeń: OpenPIT();... Główna pętla programu lub system wielowątkowy while (1) { USART_Read(); process data LCD_Write(); process data Button_Menu(); process data }; Interrupt_Handlers { } Sterowniki 1 poziomu Sterowniki 2 poziomu PIO Timer PIT USART Ethernet RTC Sterowniki 3 poziomu LED Button 0..5 GPIO LCD Delay_ms Urządzenia komunikacyjne Kalendarz Interrupt 86
87 Sterowniki systemu mikroprocesorowego Sterowniki urządzeń 1 poziomu: Sterownik portu równoległego PIO, Sterowniki 2-go poziomu (korzystają ze sterowników 1-go poziomu): Sterownik diod LED, Sterownik klawiatury, Sterownik wyświetlacza LCD, Sterownik portów GPIO, Sterownik Timera PIT, Sterownik interfejsu USART, Sterownik interfejsu Ethernet, Sterownik zegara RTC. Sterowniki 3-go poziomu (korzystają ze sterowników 2-go poziomu): Sterownik kalendarza. 87
88 Przykładowe funkcje sterownika portu równoległego PIO_Struct* PIO_Open (unsigned int *RegistersPointer, unsigned int PortMask); void PIO_Close (unsigned int *RegistersPointer, unsigned int PortMask); unsigned int PIO_Read (PIO_Struct* PoiterToPIO); void PIO_Write (PIO_Struct* PoiterToPIO, unsigned int Data); unsigned int PIO_status (PIO_Struct* PoiterToPIO); Funkcje zwracające status operacji: unsigned int PIO_Read (PIO_Struct* PoiterToPIO, unsigned int *ReadData); unsigned int PIO_Write (PIO_Struct* PoiterToPIO, unsigred int *DataToSend); unsigned int PIO_Status (PIO_Struct* PoiterToPIO, unsigned int *DeviceStatus); Funkcje pomocnicze: void PIO_EnablePullUp (unsigned int *RegistersPointer, unsigned int PortMask); void PIO_DisablePullUp (unsigned int *RegistersPointer, unsigned int PortMask); unsigned int PIO_StatusPullUp (unsigned int *RegistersPointer, unsigned int PortMask); 88
89 Schemat blokowy portu I/O sterowanie wyjściem Output Enable Reg. Pull-Up Enable Reg. Periph. A status Reg. 100 k PIO Enable Reg. Multi-driver Enable Reg. (OpenDrain) Set Output Data Reg. 89
90 Schemat blokowy portu I/O odczyt stanu wejścia Pin Data Status Reg. Interrupt Status Reg. Input Filter Diss. Reg. Interrupt Enable Reg. Interrupt Mask Reg. 90
91 Jak napisać sterownik? 1. Przygotowanie struktury odzwierciedlającej rejestry danego urządzenia oraz masek pomocnych podczas operacji na rejestrach, 2. Opracowanie zmiennych pozwalających na sprawdzenie stanu danego urządzenia (np. czy urządzenie było już zainicjalizowane, czy ze sterownika korzysta jakieś urządzenie? Czy jedno?, jakie opóźnienie odmierza timer,...), 3. Opracowanie funkcji sterownika (Open, Close, Read, Write) oraz API służącego do komunikacji ze sterownikiem, 4. Opracowanie procedur obsługujących przerwania (wcześniejsze funkcje powinny na tym etapie działać późniejsza lokalizacja problemów z włączonymi przerwaniami może być bardzo trudna lub nawet niemożliwa) 91
92 Sterownik obsługujący kilka timer'ów Systemy wbudowane struct { TimerState Timer_State; /* current timer state */ TimerType Timer_Type; /* current timer mode */ unsigned int Timer_Length; /* length of delay - number of hardware timer ticks */ unsigned int Timer_Count; /* number of ticks to expiere for each software timer */ Timer * Timer_next; /* pointer to the next software timer */ } FirstTimer, *FirstTimer_; Uporządkowana lista timer'ów FirstTimer_ Timer sprzętowy generuje przerwanie co 1 ms. Timery programowe mogą generować przerwania będące wielokrotnością 1 ms. Timer_State TimerState = Active Timer_Type TimerState = OneShot Active Timer_Counter Timer_Length = 10 Timer_Count Timer_Ticks = 1 Timer_Next = 0xfff540 Timer_State TimerState = Active Timer_Type TimerState = Periodic Active Timer_Length = 20 Timer_Count = 17 Timer_Next = 0xfff540 TimerState Timer_State = = Active Idle Timer_Type TimerState = OneShot Active Timer_Length = 220 Timer_Count = 0 Timer_Next = NULL Soft Timer nr 1 Soft Timer nr 2 Soft Timer nr 3 92
93 Przykładowy sterownik timer'a enum TimerState {Idle, Active, Done}; enum TimerType {OneShot, Periodic}; typedef struct { TimerState Timer_State; /* current timer state */ TimerType Timer_Type; /* current timer mode */ unsigned int Timer_Length; /* length of delay - number of hardware timer ticks */ unsigned int Timer_Count; /* number of ticks to expiere for each software timer */ Timer * Timer_next; /* pointer to the next software timer */ } Timer, *Timer_; int Timer_Open(Timer_ * TPoin) /* configure hardware and soft timer */ int Timer_Close(Timer_ * TPoin) /* release hardware or soft timer */ int Timer_Start(unsigned int miliseconds, TimerType Type, Timer_ * TPoin) /* start timer */ int Timer_Wait_For (Timer_ * TPoin) /* wait until timer fired */ void Timer_Cancel (Timer_ * TPoin) /* turn off software timer */ static void Timer_INT (void); /* hardware timer interrupt, e.g. 1 ms */ 93
94 Funkcje sterownika Timer'a programowego (1) Systemy wbudowane int Timer_Start (unsigned int miliseconds, TimerType Type, Timer_ * TPoin){ if (Tpoin->Timer_State!= Idle) return -1; Tpoin->Timer_State = Active; Tpoin->Timer_Type = Type; Tpoin->Timer_Length = miliseconds / MSPERTICK; /* delay in ms */ AddTimerToList (Tpoin); /* add pointer to the previous timer structure */ return 0; } void Timer_Cancel (Timer_ * TPoin){ if (Tpoin->Timer_State == Active) RemoveTimerFromList (Tpoin); Tpoin->Timer_State = Idle; } 94
95 Funkcje sterownika Timer'a programowego (2) int Timer_Wait_For (Timer_ * TPoin){ if (Tpoin->Timer_State!= Active) return -1; while (Tpoin->Timer_State!= Done); if (Tpoin->Timer_Type = Periodic){ Tpoin->Timer_State = Active; AddTimerToList (Tpoin); } else { Tpoin->Timer_State = Idle; } return 0; } Systemy wbudowane 95
96 Obsługa przerwania od timera sprzętowego static void Timer_INT (void){ /* hardware timer interrupt, e.g. 1 ms */ 0. Obsługa timera sprzętowego (reinicjalizacja t = 1 ms, potwierdzenie przerwania, itd...) 1. Sprawdź listę timerów, 2. Zdekrementuj pola Timer_Count, 3. Jeżeli Timer_Count równe 0 i TimerType = OneShot usuń timer z listy, 4. Jeżeli Timer_Count równe 0 i TimerType = Periodic uruchom timer ponownie, Timer_Count = Timer_Length. 5. Modyfikacja flagi od danego timer'a (Timer_Fired) lub wygenerownie przerwania programowego od danego timera. } 96
97 Sterowniki, a język C++ enum TimerState { Idle, Active, Done }; enum TimerType { OneShot, Periodic }; class Timer { public: Timer (); ~Timer (); int Start (unsigned int miliseconds, TimerType = OneShot); int Wait_For (); void Cancel (); TimerState TimerType unsigned int State; Type; Length; }; unsigned int Count; Timer * pnext; private: static void INT (); 97
98 Plik startowy (startup file) 98
99 Struktura pliki startowego Program startowy uruchamiany jest zaraz po sygnale resetu w celu konfiguracji podstawowych zasobów procesora. Plik startowy jest zwykle napisany w jęzuku asemblera ze względu na odwołania do specyficznych zasobów procesora (dostępnych z poziomu asemblera) i uruchamiany przed programem napisanym w języku wyższego poziomu: Alokacja pamięci na stosy dla poszczególnych trybów pracy procesora, inicjalizacja wskaźników dla stosów, Konfiguracja pamięci (SRAM, przemapowanie pamięci FLASH, wyczyszczenie pamięci), Iniclalizacja tablicy wektorów wyjątków, Skopiowanie kodu systemu operacyjnego lub aplikacji do pamięci RAM, Inicjalizacja zmiennych globalnych w pamięci RAM (skopiowanie danych, wyzerownie, przypisanie wartości), Konfiguracja wymaganych urządzeń peryferyjnych, Inicjalizacja systemu przerwań, Zmiana trybu pracy procesora (jeżeli wymagane), Wywołanie funkcji main(). 99
100 Struktura pliki startowego Wektor RESET (pod adresem 0) 0x section.text reset_handler: ldr pc, =_low_level_init /* Inicjalizacja... */ _low_level_init: Tablica wyjątków Pamięć FLASH startup file _stack_init: _init_data: _init_bss: _branch_main: 0x x xFFFF.F000 Pamięć RAM Pamięć SDRAM Urządzenia peryferyjne 100
101 Struktura pliki startowego Program w funkcji main powinien pracować w nieskonczonej pętli, nie może zostać wykonany rozkaz return albo exit _branch_main: ldr r0, =main mov lr, pc bx r0... void main (void) { While (1) { program główny } } return 0; 101
102 Struktura pliki startowego Konfiguracja urządzeń krytycznych, niezbędnych do pracy procesora: Konfiguracja modułu dostarczającego sygnał zegarowy (PLL). Po resecie procesor pracuje z tzw. wolnych zegarem (wewnętrzny generator RC), Konfiguracja modułu sterującego pamięcią FLASH, RAM (liczba cykli opóźnienia pamięci WaitStates), Przemapowanie pamięci FLASH-SRAM, Konfiguracja licznika Watch-Dog (po resecie Watch-Dog jest włączony), Konfiguracja modułu AIC (przypisanie domyślnych handlerów do przerwań), Inicjalizacja wskaźników stosów dla poszczególnych trybów pracy (Mode, IRQ, FIQ,...), Odblokowanie wejścia NRST sygnału reset 102
103 Podmiana pamięci po uruchomieniu Mapa pamięci podczas uruchamiania 0x Pamięć FLASH Mapa pamięci po przemapowaniu 0x Pamięć RAM 0x Pamięć SRAM 0x Pamięć SRAM 0x Pamięć FLASH 0x Pamięć FLASH 0xFFFF.F000 Urządzenia peryferyjne 0xFFFF.F000 Urządzenia peryferyjne Podmiana pamięci FLASH następuje po wykonaniu programu startup (rejestr REMAP, najmłodszy bit) 103
104 Konfiguracja i wybór sygnału zegarowego - rozdział 28 (1) Po restarcie procesor pracuje z tzw. wolnym zegarem (SLOWCLK) o częstotliwości f = Hz. Zegar ten jest zawsze dostępny, generowany jest przez wbudowany generator RC. Po restarcie generator kwarcowy oraz blok pętli synchronizacji fazowej PLL (Phase Locked Loop) są wyłączone. Urządzenia peryferyjne i pamięci Rdzeń ARM 104
105 Generator z pętlą PLL (1) Pętla synchronizacji fazy, pętla sprzężenia fazowego, PLL (ang. Phase Locked Loop) - układ elektroniczny działający na zasadzie sprzężenia zwrotnego, służący do automatycznej regulacji częstotliwości. Stosowana w syntezerach częstotliwości heterodyny w odbiornikach radiowych, telewizyjnych oraz w generatorach częstotliwości wzorcowych i powielaczach częstotliwości. Generator PLL zbudowany jest z: generatora sygnału referencyjnego (rezonatora kwarcowego), detektora fazy, filtru dolnoprzepustowego, generatora przestrajanego napięciem - VCO, pętli sprzężenia zwrotnego, w której występuje dzielnik częstotliwości. 105
106 Generator z pętlą PLL (2) Sygnał wysokiej częstotliwości generowany przez VCO jest sygnałem na wyjściu całego urządzenia (Fo). Jednocześnie podawany jest do pętli sprzężenia zwrotnego, w której zwykle następuje dzielenie jego częstotliwości tak, aby była równa częstotliwości sygnału referencyjnego (Fi). Dzięki temu różnica faz obu sygnałów - uzyskana w detektorze fazy - po przejściu przez filtr steruje generatorem VCO (generator sterowany napięciem, napięci rośnie => częstotliwość rośnie), korygując jego częstotliwość. 106
107 Konfiguracja i wybór sygnału zegarowego (2) Systemy wbudowane Procedura włączenia generatora z pętlą PLL: 1. Włączenie generatora kwarcowego. Po włączeniu należy odczekać, aż częstotliwość się ustabilizuje (bit PMC_MOSCS). 2. Konfiguracja pętli PLLA, f = *110/9 = ~200 MHz. Po włączeniu należy odczekać, aż PLLA się zablokuje (bit PMC_LOCKA), a częstotliwość ustabilizuje (bit PMC_MCKRDY). 3. Konfiguracja wyprowadzenia taktującego procesor na PLLA (w przykładzie dodatkowy podzielnik równy 2), bit AT91C_PMC_CSS_PLLA_CLK. Odczekanie, aż czestotliwość się ustabilizuje. Konfiguracja PLLA: AT91C_BASE_PMC-> PMC_PLLAR = AT91C_CKGR_SRCA /* programming PLL */ AT91C_CKGR_OUTA_2 /* parametry elektryczne */ (0x3F << 8) /* counter = 63 */ (AT91C_CKGR_MULA & (0x6D << 16)) /* mnożnik 109 */ (AT91C_CKGR_DIVA & 9); /* dzielnik 9 */ Fref = Hz fout = fref * (MULA+1) / DIVA = 16 MHz * 110 / 9 => 200 MHz f MCK = fout / 2 => ~100 MHz 107
108 Analiza pliku lowlevel.c 108
109 COFF vs ELF COFF (Common Object File Format) standard plików wykonywalnych, relokowalnych i bibliotek dynamicznych opracowany na potrzeby systemów operacyjnych bazujących na systemie Unix. COFF miał zastąpić standard plików a.out. Wykorzystywany na różnych systemach, również Windows. Obecnie standard COFF wypierany jest przez pliki ELF. ELF (Executable and Linkable Format) standard plików wykonywalnych, relokowalnych, bibliotek dynamicznych i zrzutów pamięci wykorzystywany na różnych komputerach i systemach operacyjnych, np.: rodzina x86, PowerPC, OpenVMS, BeOS, konsole PlayStation Portable, PlayStation 2, PlayStation 3, Wii, Nintendo DS, GP2X, AmigaOS 4 oraz Symbian OS v9. Przydatne narzędzia: readelf elfdump objdump Źródłó: wikipedia 109
110 Skrypt linkera /* elf32-littlearm.lds for ARM At91SAM9263 */ OUTPUT_FORMAT ("elf32-littlearm", "elf32-littlearm", "elf32-littlearm") OUTPUT_ARCH (arm) ENTRY (reset_handler) /*#include "project.h"*/ SECTIONS {. = 0x1.0000; /* base address */.text : { (.text) } /* code section */. = 0x ; /* base address */.data : { (.data) } /* initialized data */.bss : { *(.bss) } /* uninitialized data */ } LED_test: $(OBJS) $(LD) $(LDFLAGS) -Ttext 0x Tdata 0x n -o $(OUTFILE_SDRAM).elf $ (OBJS) 110
111 Skrypt linkera dla procesora ARM AT91SAM9263 Systemy wbudowane SECTIONS {.text : { _stext =.; *(.text) /* program code */ *(.rodata) /* read-only data (constants) */ *(.rodata*). = ALIGN(4); _etext =. ; } /* all initialized.data that go into FLASH */.data : AT ( ADDR (.text) + SIZEOF (.text) ) { _sdata =.; *(.vectors) /* vectors table */ (.data) /* initialized data */ _edata =.; } /* all uninitialized.bss that go into FLASH */.bss (NOLOAD) : {. = ALIGN(4); _sbss =.; *(.bss) /* uninitialized data */ _ebss =.; } } end =.; CROSS_COMPILE=arm-elf- LD=$(CROSS_COMPILE)gcc LDFLAGS+=-nostartfiles -Wl,--cref LDFLAGS+=-lc -lgcc LDFLAGS+=-T elf32-littlearm.lds OBJS = cstartup.o OBJS+= lowlevel.o main.o LED_test: $(OBJS) $(LD) $(LDFLAGS) -Ttext 0x Tdata 0x n -o $(OUTFILE_LED_test).elf $(OBJS) 111
112 Proces kompilacji programu *.o *.elf, *.bin 1 faza kompilacja plików źródłowych pliki binarne, relokowalne 2 faza linkowanie plików relokowalnych plik binarny, relokowalny 3 faza generowanie pliku wykonywalnego (przypisanie adresów) 112
113 Przykładowe pytania (1) Interfejs I2C jest interfejsem: Równoległym, Szeregowym, Umożliwiającym transmisję danych na duże odległości rzędu dziesiątek metrów, Umożliwiającym transmisję danych z szybkością kilku Mbps, Umożliwiającym transmisję Master - Slave, Umożliwiającym transmisję Multi Master - Slave, Umożliwiającym transmisję Master Multi Slave, W którym ramka danych zawiera bit startu oraz bit stopu, W którym ramka danych zawiera bit parzystości, Umożliwia transmisję od 5 do 9 bitów w jednej, Umożliwia adresewanie urządzeń przy użyciu 8-bitowego adresu, Umożliwia adresewanie urządzeń przy użyciu 10-bitowego adresu Wymaga konwersji napięć odpowiadających przesyłanym symbolom MARK i SPACE określonych w standardzie, Pozwala na transmisje danych typu Full-duplex, Half-duplex, itd
114 Przykładowe pytania (2) Na rys. 1 podano schemat blokowy timera. Okres czasu odmierzanego przez timer wyraża się wzorem:.... Proszę policzyć: Okres maksymalnego opóźnia generowanego przez timer, Jaką wartość należy wpisac do rejestru DIV, aby timer odliczył czas równych 1 ms? Jaka jest wartość błędu popełnionego podczas odmierzania odcinka czasu równego 8 ms? Na rys. 2 przedstawiono schemat blokowy generatora częstotliwości wzorcowej zbudowanego z wykorzystaniem pętli synchronizacji fazy (PLL). Proszę policzyć jaką częstotliwość wygeneruje pętla dla wartości wpisanych do rejestrów równych odpowiednio DIV = 0x0A i MUV = 0x56. Jaką wartość należy wpisać do rejestów, aby uzyskać częstotliwość f = 1 MHz, dla częstotliwości zegara wzorcowego równej f = Hz. Procesor wykonuje następujący program: while (1) {};. Proszę omówić operacje jakie wykona procesor w po wygenerowaniu przerwania od układu Timera. Procedura obsługi timera: void Timer_INT (void) { } TimerPointer->INT_FLAG = 0; 114
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu
 Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Procesory ARM w systemach wbudowanych Programowanie procesorów ARM
 Programowanie procesorów ARM Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Programowanie procesorów ARM Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw
 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Współpraca procesora ColdFire z urządzeniami peryferyjnymi
 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 2 Interfejs szeregowy EIA RS232 3 Transceiver UART Rejestr przesuwny
Współpraca procesora z urządzeniami peryferyjnymi 1 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 2 Interfejs szeregowy EIA RS232 3 Transceiver UART Rejestr przesuwny
Urządzenia peryferyjne procesora ColdFire
 Urządzenia peryferyjne procesora ColdFire 1 Moduł generatora sygnału zegarowego (Clock Module) 2 Generator z pętlą PLL (1) Pętla synchronizacji fazy, pętla sprzężenia fazowego, PLL (ang. Phase Locked Loop)
Urządzenia peryferyjne procesora ColdFire 1 Moduł generatora sygnału zegarowego (Clock Module) 2 Generator z pętlą PLL (1) Pętla synchronizacji fazy, pętla sprzężenia fazowego, PLL (ang. Phase Locked Loop)
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu
 Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Architektura Systemów Komputerowych. Transmisja szeregowa danych Standardy magistral szeregowych
 Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH. Interfejsy klasy RS
 INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH Interfejsy klasy RS Grzegorz Lentka/Marek Niedostatkiewicz Katedra Optoelektroniki i Systemów Elektronicznych ETI PG 2010 RS232 (1) RS232-1962, RS232C - 1969, Electronic
INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH Interfejsy klasy RS Grzegorz Lentka/Marek Niedostatkiewicz Katedra Optoelektroniki i Systemów Elektronicznych ETI PG 2010 RS232 (1) RS232-1962, RS232C - 1969, Electronic
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Programowanie mikrokontrolerów. 15 stycznia 2008
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu
 Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
4 Transmisja szeregowa, obsługa wyświetlacza LCD.
 1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD.
 13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
CompactPCI. PCI Industrial Computers Manufacturers Group (PICMG)
") PCI Industrial Computers Manufacturers Group (PICMG) nowy standard; nowa jakość komputerów realizujących krytyczne zadania w systemach pracujących w trudnych warunkach; Baza specyfikacji: format kaset
PCI Industrial Computers Manufacturers Group (PICMG) nowy standard; nowa jakość komputerów realizujących krytyczne zadania w systemach pracujących w trudnych warunkach; Baza specyfikacji: format kaset
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Systemy wbudowane - wykład 8. Dla zabicia czasu Notes. I 2 C aka IIC aka TWI. Notes. Notes. Notes. Przemek Błaśkiewicz.
 Systemy wbudowane - wykład 8 Przemek Błaśkiewicz 17 maja 2017 1 / 82 Dla zabicia czasu Bluetooth Terminal HC-05, urządzenie...:8f:66, kod 1234 2 / 82 I 2 C aka IIC aka TWI Inter-Integrated Circuit 3 /
Systemy wbudowane - wykład 8 Przemek Błaśkiewicz 17 maja 2017 1 / 82 Dla zabicia czasu Bluetooth Terminal HC-05, urządzenie...:8f:66, kod 1234 2 / 82 I 2 C aka IIC aka TWI Inter-Integrated Circuit 3 /
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Urządzenia peryferyjne RS-232. Wykład 2
 Urządzenia peryferyjne RS-232 Wykład 2 Transmisja szeregowa Poprzez kanały telekomunikacyjne Zaleta: niskie koszty Wymaga konwersji szeregowo/równoległej np. rejestr przesuwny Dwie metody: asynchroniczna
Urządzenia peryferyjne RS-232 Wykład 2 Transmisja szeregowa Poprzez kanały telekomunikacyjne Zaleta: niskie koszty Wymaga konwersji szeregowo/równoległej np. rejestr przesuwny Dwie metody: asynchroniczna
MAGISTRALE MIKROKONTROLERÓW (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska") (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
(BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
System interfejsu RS 232C opracowali P. Targowski i M. Rębarz
 System interfejsu RS 232C opracowali P. Targowski i M. Rębarz Standard RS 232C (Recommended Standard) został ustanowiony w 1969 r. przez Electronic Industries Association. Definiuje on sposób nawiązania
System interfejsu RS 232C opracowali P. Targowski i M. Rębarz Standard RS 232C (Recommended Standard) został ustanowiony w 1969 r. przez Electronic Industries Association. Definiuje on sposób nawiązania
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
Komunikacja z urzadzeniami zewnętrznymi
 Komunikacja z urzadzeniami zewnętrznymi Porty Łacza równoległe Łacza szeregowe Wymiana informacji - procesor, pamięć oraz urzadzenia wejścia-wyjścia Większość mikrokontrolerów (Intel, AVR, PIC) używa jednego
Komunikacja z urzadzeniami zewnętrznymi Porty Łacza równoległe Łacza szeregowe Wymiana informacji - procesor, pamięć oraz urzadzenia wejścia-wyjścia Większość mikrokontrolerów (Intel, AVR, PIC) używa jednego
Instrukcja MM-717 Tarnów 2010
 Instrukcja MM-717 Tarnów 2010 Przeznaczenie modułu komunikacyjnego MM-717. Moduł komunikacyjny MM-717 służy do realizacji transmisji z wykorzystaniem GPRS pomiędzy systemami nadrzędnymi (systemami SCADA)
Instrukcja MM-717 Tarnów 2010 Przeznaczenie modułu komunikacyjnego MM-717. Moduł komunikacyjny MM-717 służy do realizacji transmisji z wykorzystaniem GPRS pomiędzy systemami nadrzędnymi (systemami SCADA)
Mikroprocesor Operacje wejścia / wyjścia
 Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Systemy wbudowane - wykład 7
 Systemy wbudowane - wykład 7 Przemek Błaśkiewicz 11 kwietnia 2019 1 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit 2 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit używa dwóch linii przesyłowych
Systemy wbudowane - wykład 7 Przemek Błaśkiewicz 11 kwietnia 2019 1 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit 2 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit używa dwóch linii przesyłowych
MIKROKONTROLERY - MAGISTRALE SZEREGOWE
 Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
TECHNIKA MIKROPROCESOROWA II
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział IEiT Katedra Elektroniki TECHNIKA MIKROPROCESOROWA II LAB 6 Moduł UART - współpraca z komputerem poprzez BlueTooth Mariusz Sokołowski
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział IEiT Katedra Elektroniki TECHNIKA MIKROPROCESOROWA II LAB 6 Moduł UART - współpraca z komputerem poprzez BlueTooth Mariusz Sokołowski
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Wykład 4. Interfejsy USB, FireWire
 Wykład 4 Interfejsy USB, FireWire Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB
Wykład 4 Interfejsy USB, FireWire Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB
PRZERWANIA. 1. Obsługa zdarzeń, odpytywanie i przerwania Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego.
 PRZERWANIA 1. Obsługa zdarzeń, odpytywanie i Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego. Istnieją dwie metody pozyskania informacji o zdarzeniach: 1. Cykliczne
PRZERWANIA 1. Obsługa zdarzeń, odpytywanie i Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego. Istnieją dwie metody pozyskania informacji o zdarzeniach: 1. Cykliczne
System mikroprocesorowy i peryferia. Dariusz Chaberski
 System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Start Bity Bit Stop 1 Bit 0 1 2 3 4 5 6 7 Par. 1 2. Rys. 1
 Temat: Obsługa portu komunikacji szeregowej RS232 w systemie STRC51. Ćwiczenie 2. (sd) 1.Wprowadzenie do komunikacji szeregowej RS232 Systemy bazujące na procesorach C51 mogą komunikować się za pomocą
Temat: Obsługa portu komunikacji szeregowej RS232 w systemie STRC51. Ćwiczenie 2. (sd) 1.Wprowadzenie do komunikacji szeregowej RS232 Systemy bazujące na procesorach C51 mogą komunikować się za pomocą
Architektura systemu komputerowego. Działanie systemu komputerowego. Przerwania. Obsługa przerwań (Interrupt Handling)
") Struktury systemów komputerowych Architektura systemu komputerowego Działanie systemu komputerowego Struktura we/wy Struktura pamięci Hierarchia pamięci Ochrona sprzętowa Architektura 2.1 2.2 Działanie
Struktury systemów komputerowych Architektura systemu komputerowego Działanie systemu komputerowego Struktura we/wy Struktura pamięci Hierarchia pamięci Ochrona sprzętowa Architektura 2.1 2.2 Działanie
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
NX70 PLC www.atcontrol.pl
 NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Problematyka sieci miejscowej LIN
 Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Kod produktu: MP-BTM222-5V
 Moduł interfejsu Bluetooth na bazie BTM-222, sterowany komendami AT, poziom napięć TTL 5V Urządzenie zbudowano w oparciu o moduł transmisyjny Bluetooth typu BTM-222 firmy Rayson, umożliwiający zasięg bezprzewodowy
Moduł interfejsu Bluetooth na bazie BTM-222, sterowany komendami AT, poziom napięć TTL 5V Urządzenie zbudowano w oparciu o moduł transmisyjny Bluetooth typu BTM-222 firmy Rayson, umożliwiający zasięg bezprzewodowy
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515
 Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Sprawozdanie z projektu MARM. Część druga Specyfikacja końcowa. Prowadzący: dr. Mariusz Suchenek. Autor: Dawid Kołcz. Data: r.
 Sprawozdanie z projektu MARM Część druga Specyfikacja końcowa Prowadzący: dr. Mariusz Suchenek Autor: Dawid Kołcz Data: 01.02.16r. 1. Temat pracy: Układ diagnozujący układ tworzony jako praca magisterska.
Sprawozdanie z projektu MARM Część druga Specyfikacja końcowa Prowadzący: dr. Mariusz Suchenek Autor: Dawid Kołcz Data: 01.02.16r. 1. Temat pracy: Układ diagnozujący układ tworzony jako praca magisterska.
LEKCJA TEMAT: Zasada działania komputera.
 LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
Działanie systemu operacyjnego
 Działanie systemu operacyjnego Budowa systemu komputerowego Jednostka centralna Sterownik dysku Sterownik drukarki Sterownik sieci Szyna systemowa (magistrala danych) Sterownik pamięci operacyjnej Pamięć
Działanie systemu operacyjnego Budowa systemu komputerowego Jednostka centralna Sterownik dysku Sterownik drukarki Sterownik sieci Szyna systemowa (magistrala danych) Sterownik pamięci operacyjnej Pamięć
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
XMEGA. Warsztaty CHIP Rok akademicki 2014/2015
 XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
ZL30ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F103
 ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy bufor dwukierunkowy HC244 dwa 4-bitowe bufory jednokierunkowe
 Bufory (BUFFER) Bufory stosuje się po to by: - zwiększyć obciążalność magistrali - chronić układ wysokiej skali integracji - sterować przepływem danych HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy
Bufory (BUFFER) Bufory stosuje się po to by: - zwiększyć obciążalność magistrali - chronić układ wysokiej skali integracji - sterować przepływem danych HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy
2. PORTY WEJŚCIA/WYJŚCIA (I/O)
") 2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
Charakterystyka mikrokontrolerów
 Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Sygnały DRQ i DACK jednego kanału zostały użyte do połączenia kaskadowego obydwu sterowników.
 Płyty główne Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Układ DMA Układ DMA zawiera dwa sterowniki przerwań 8237A połączone kaskadowo. Każdy sterownik 8237A
Płyty główne Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Układ DMA Układ DMA zawiera dwa sterowniki przerwań 8237A połączone kaskadowo. Każdy sterownik 8237A
1. Tworzenie nowego projektu.
 Załącznik do Instrukcji 1. Tworzenie nowego projektu. Wybieramy opcję z menu głównego New->QNX C Project. Wprowadzamy nazwę przechodzimy do następnego kroku NEXT. Wybieramy platformę docelową oraz warianty
Załącznik do Instrukcji 1. Tworzenie nowego projektu. Wybieramy opcję z menu głównego New->QNX C Project. Wprowadzamy nazwę przechodzimy do następnego kroku NEXT. Wybieramy platformę docelową oraz warianty
o Instalacja środowiska programistycznego (18) o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)
 o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)") O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
Architektura systemów komputerowych. dr Artur Bartoszewski
 Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Programowanie mikrokontrolerów 2.0
 4.1 Programowanie mikrokontrolerów 2.0 Taktowanie Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 listopada 2016 4.2 Drzewo taktowania w STM32F411 Źródło: RM0383 Reference
4.1 Programowanie mikrokontrolerów 2.0 Taktowanie Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 listopada 2016 4.2 Drzewo taktowania w STM32F411 Źródło: RM0383 Reference
Działanie systemu operacyjnego
 Budowa systemu komputerowego Działanie systemu operacyjnego Jednostka centralna dysku Szyna systemowa (magistrala danych) drukarki pamięci operacyjnej I NIC sieci Pamięć operacyjna Przerwania Przerwania
Budowa systemu komputerowego Działanie systemu operacyjnego Jednostka centralna dysku Szyna systemowa (magistrala danych) drukarki pamięci operacyjnej I NIC sieci Pamięć operacyjna Przerwania Przerwania
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
1.2 Schemat blokowy oraz opis sygnałów wejściowych i wyjściowych
 Dodatek A Wyświetlacz LCD. Przeznaczenie i ogólna charakterystyka Wyświetlacz ciekłokrystaliczny HY-62F4 zastosowany w ćwiczeniu jest wyświetlaczem matrycowym zawierającym moduł kontrolera i układ wykonawczy
Dodatek A Wyświetlacz LCD. Przeznaczenie i ogólna charakterystyka Wyświetlacz ciekłokrystaliczny HY-62F4 zastosowany w ćwiczeniu jest wyświetlaczem matrycowym zawierającym moduł kontrolera i układ wykonawczy
Tworzenie sterowników dla FreeBSD. Michał Hajduk mih@semihalf.com
 Tworzenie sterowników dla FreeBSD Michał Hajduk mih@semihalf.com AGH, Kraków 23.04.2009 Szkic prezentacji Wstęp, defnicje Architektura urządzeń RTC, I2C, DMA Wprowadzenie do tworzenia sterowników Newbus,
Tworzenie sterowników dla FreeBSD Michał Hajduk mih@semihalf.com AGH, Kraków 23.04.2009 Szkic prezentacji Wstęp, defnicje Architektura urządzeń RTC, I2C, DMA Wprowadzenie do tworzenia sterowników Newbus,
Pośredniczy we współpracy pomiędzy procesorem a urządzeniem we/wy. W szczególności do jego zadań należy:
 Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
STM32 Butterfly. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Wykład Mikroprocesory i kontrolery
 Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ. Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM
 LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip.
 1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Urządzenia wejścia-wyjścia
 Urządzenia wejścia-wyjścia Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Klasyfikacja urządzeń wejścia-wyjścia Struktura mechanizmu wejścia-wyjścia (sprzętu i oprogramowania) Interakcja
Urządzenia wejścia-wyjścia Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Klasyfikacja urządzeń wejścia-wyjścia Struktura mechanizmu wejścia-wyjścia (sprzętu i oprogramowania) Interakcja
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
WYKŁAD 5. Zestaw DSP60EX. Zestaw DSP60EX
 Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Architektura systemu komputerowego
 Zakres przedmiotu 1. Wstęp do systemów mikroprocesorowych. 2. Współpraca procesora z pamięcią. Pamięci półprzewodnikowe. 3. Architektura systemów mikroprocesorowych. 4. Współpraca procesora z urządzeniami
Zakres przedmiotu 1. Wstęp do systemów mikroprocesorowych. 2. Współpraca procesora z pamięcią. Pamięci półprzewodnikowe. 3. Architektura systemów mikroprocesorowych. 4. Współpraca procesora z urządzeniami