Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu
|
|
|
- Seweryn Brzeziński
- 8 lat temu
- Przeglądów:
Transkrypt
1 Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią, nowoczesna oferta edukacyjna i wzmacniania zdolności do zatrudniania osób niepełnosprawnych Prezentacja dystrybuowana jest bezpłatnie Politechnika Łódzka, ul. Żeromskiego 116, Łódź, tel. (042) Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
2 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel dmakow@dmcs.pl Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 2
3 Sprawy formalne Informacje ogólne Zaliczenie Laboratorium Materiały do wykładu Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 3
4 Literatura Literatura obowiązkowa: Materiały wykładowe i laboratoryjne P. Betty, Nowoczesne pamięci półprzewodnikowe. Architektura i organizacja układów pamięci DRAM i SRAM, WNT, 1999 P. Metzger, Anatomia PC, Helion, 2006 J. Kalisz, Podstawy elektroniki cyfrowej, WKŁ, 2008 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 4
5 Zakres przedmiotu Wprowadzenie Układy peryferyjne Transmisja danych interfejsy elektryczne Pamięci w systemach mikroprocesorowych Programowalne układy dekoderów adresowych Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 5
6 Interfejsy w systemach wbudowanych 6
7 Definicje podstawowe (1) Pamięć komputerowa (ang. Computer Memory) Pamięć komputerowa to urządzenie elektroniczne lub mechaniczne służące do przechowywania danych i programów (systemu operacyjnego oraz aplikacji). Urządzenia zewnętrzne, peryferyjne (ang. Peripheral Device) Urządzenia elektroniczne dołączone do procesora przez magistrale systemową lub interfejs. Urządzenia zewnętrzne wykorzystywane są do realizowania specjalizowanej funkcjonalności systemu. Magistrala (ang. bus) Połączenie elektryczne umożliwiające przesyłanie danym pomiędzy procesorem, pamięcią i urządzeniami peryferyjnymi. Magistra systemowa zbudowane jest zwykłe z kilkudziesięciu połączeń elektrycznych (ang. Parallel Bus) lub szeregowego połączenia (ang. Serial Bus). Interface (ang. Interface) Urządzenie elektroniczne lub optyczne pozwalające na komunikację między dwoma innymi urządzeniami, których bezpośrednio nie da się ze sobą połączyć. 7
8 Współpraca procesora z urządzeniami peryferyjnymi (1) Interfejsy wykorzystywane w systemach mikroprocesorowych: Interfejs równoległy. Interfejsy szeregowe: Interfejs DBGU - zgodny ze standardem EIA RS232, Interfejs uniwersalny USART, Interfejs Serial Peripheral Interface (SPI), Interfejs Synchronous Serial Controller (SSC), Interfejs I2C, Interfajs Two-wire Interface (TWI), Interfejs Controlled Area Network (CAN), Interfejs Universal Serial Bus (USB), Interfejs Ethernet (10/100, 1 Gb, 10 Gb, 100 Gb), Magistrala PCI, Magistrala PCIe (PCI express), RapidIO, Serial RapidIO,... 8
9 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ARM: Interfejs równoległy PIO (zwykle 32 bity), Interfejsy szeregowe: Interfejs DBGU - zgodny ze standardem EIA RS232, Interfejs uniwersalny USART, Interfejs Serial Peripheral Interface (SPI), Interfejs Synchronous Serial Controller (SSC), Interfejs I2C, Interfajs Two-wire Interface (TWI), Interfejs Controlled Area Network (CAN), Interfejs Universal Serial Bus (USB), Interfejs Ethernet 10/100. 9
10 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 10
11 Interfejs szeregowy EIA RS232 11
12 Transceiver UART Rejestr przesuwny TxD D0-D7 Nadajnik Clk D0-D7 Odbiornik RxD Clk 12
")
13 Ramka danych transmitera UART (1) Mark Space 13
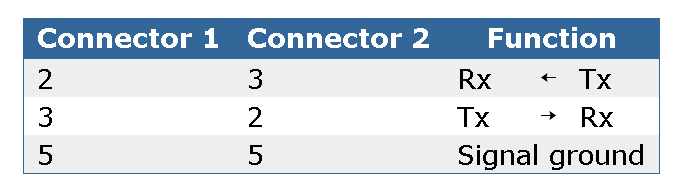

14 Kabel null-modem EIA
15 Poziomy napięć określone przez standard EIA 232 Wyjście procesora Standard EIA RS

16 Programy do komunikacji z wykorzystaniem standardu EIA RS232 Program Hyper terminal Program minicom Program ssh Program Terminal ( 16

17 Program Minicom Skróty klawiszy: Okno konfiguracji Ctrl + A O konfiguracja Ctrl + A X wyjście z programu parametrów transmisji Ctrl + A C wyczyszczenie ekranu Okno konfiguracji ೧೭
18 AT91SAM9263 moduł diagnostyczny DBGU (rozdział 30) 18
19 Port szeregowy jako interfejs diagnostyczny Cechy portu diagnostycznego DBGU (DeBuG Unit): Asynchroniczna transmisja danych zgodna ze standardem RS232 (8 bitów danych, jeden bit parzystości z możliwością wyłączenia), Możliwość zgłaszania przerwań systemowych współdzielonych (PIT, RTT, WDT,DMA, PMC, RSTC, MC), Azaliza poprawności odebranych ramek, Sygnalizacja przepełnionego bufora TxD lub RxD, Trzy tryby diagnostyczne: zdalny loopback, lokalny loopback oraz echo, Maksymalna szybkość transmisji rzędu 1 Mbit/s, Możliwość komunikacji z rdzeniem procesora COMMRx/COMMTx. 19
20 Schemat blokowy portu DBGU procesora ARM 9 Wyprowadzenia procesora Transceiwer szeregowy Sygnał przerwnia SYS 20
21 Szybkość transmisji Generator sygnału zegarowego odpowiedzialnego za szybkość transmisji (ang. Baud Rate). Szybkość transmisji danych wyrażona jest wzorem: Baud Rate = MCK / (16 x CD), gdzie CD (Clock Divisor) jest polem rejestru DBGU_BRGR 21
22 Błędy podczas transmisji danych Przepełnienie bufora odbiorczego BGU_RHR (ang. Buffer Overflow) Błąd parzystości (ang. Parity Error) Błąd ramki (ang. Frame Error) 22
23 Konfiguracja portu DBGU static void Open_DBGU (void){ 1. Wyłącz przerwania od portu DBGU, rejestr AT91C_BASE_DBGU->DBGU_IDR 2. Resetuj i wyłącz odbiornik AT91C_BASE_DBGU->DBGU_CR 3. Resetuj i wyłącz nadajnik AT91C_BASE_DBGU->DBGU_CR 4. Konfiguracja portów wejścia-wyjścia jako porty RxD i TxD DBGU, rejestry AT91C_BASE_PIOC->PIO_ASR oraz AT91C_BASE_PIOC->PIO_PDR 5. Konfiguracja szybkości transmisji portu szeregowego AT91C_BASE_DBGU->DBGU_BRGR 6. Konfiguracja trybu pracy, tryb normalny bez przystości (8N1), rejestr AT91C_BASE_DBGU->DBGU_MR, flagi AT91C_US_CHMODE_NORMAL, AT91C_US_PAR_NONE; 7. Skonfiguruj przerwania jeżeli są wykorzystywane: Open_DBGU_INT() 8. Włącz odbiornik, rejestr AT91C_BASE_DBGU->DBGU_CR 9. Włącz nadajnik, rejestr AT91C_BASE_DBGU->DBGU_CR } 23
24 Odczyt i zapis danych do portu DBGU void dbgu_print_ascii (const char *Buffer) { while ( data_are_in_buffer ) { while ( TXRDY... ){}; /* wait intil Tx buffer busy check TXRDY flag */ DBGU_THR =... /* write a single char to Transmitter Holding Register */ } } void dbgu_read_ascii (const char *Buffer, unsigned int Size){ do { While (...RXRDY... ){}; /* wait until data available */ Buffer[...] = DBGU_RHR; /* read data from Receiver Holding Register */ } while ( read_enough_data... ) } 24
25 Rejestr statusowy 25
26 AT91SAM9263 USART (rozdział 34) 26
27 Port szeregowy USART Cechy portu USART (Universal Synch. Asynch. Receiver-Transmitter): Asynchroniczna lub transmisja danych, Programowalna długość ramki, kontrola parzystości, liczba bitów stopu, Możliwość zgłaszania przerwań systemowych współdzielonych (PIT, RTT, WDT,DMA, PMC, RSTC, MC), Analiza poprawności odebranych ramek, Sygnalizacja przepełnionego bufora TxD lub RxD, Możliwość odbierania ramek o zmiennej długości wykorzystanie dodatkowego licznika do odmierzania czasu, Trzy tryby diagnostyczne: zdalny loopback, lokalny loopback oraz echo, Maksymalna szybkość transmisji rzędu 1 Mbit/s, Wsparcie sprzętowej kontroli przepływu danych, Możliwość transmisji w systemie Multidrop, transmisja danej i adresu, Możliwość transmisji danych z wykorzystaniem kanału DMA (Direct Memory Access), Wsparcie dla standardu transmisji różnicowej RS485 oraz systemów pracujących w zakresie podczerwieni (wbudowany modulator-demodulator IrDA). 27
28 Schemat blokowy transceivera USART 28
29 Struktury danych 29
30 Stack and FIFO (1) Stos (ang. stack lub LIFO Last-In, First-Out) liniowa struktura danych, w której dane odkładane są na wierzch stosu i z wierzchołka stosu są zdejmowane. Ideę stosu danych można zilustrować jako stos położonych jedna na drugiej książek nowy egzemplarz kładzie się na wierzch stosu i z wierzchu stosu zdejmuje się kolejne egzemplarze. Elementy stosu poniżej wierzchołka stosu można wyłącznie obejrzeć, aby je ściągnąć, trzeba najpierw po kolei ściągnąć to, co jest nad nimi FIFO (ang. First In, First Out) - przeciwieństwem stosu LIFO jest kolejka, bufor typu FIFO (pierwszy na wejściu, pierwszy na wyjściu), w którym dane obsługiwane są w takiej kolejności, w jakiej zostały dostarczone (jak w kolejce do kasy) 30
31 Kolejka FIFO (1) Dane do kolejki FIFO mogą być wpisywane przez kilka niezależnych aplikacji, wątków lub urządzeń. W takiej sytuacji dostęp do kolejki kontrolowany jest przez Semafor (zmienna globalna). Dane zgomadzone w kolejce wysyłane są w kolejności w jakiej zostały wpisane. 31
32 Kolejka FIFO (2) Dane w kolejce FIFO Adres w pamięci: 0xffD50 0xffD50 + size -1 Tail Head Zapis danej do kolejki FIFO: Zwiększ wskaźnik Head o jeden, zapisz daną. Odczyt danej z kolejki FIFO: Odczytaj daną, zwiększ wskaźnik Tail o 1. W przypadku, gdy Tail lub Head wskazuje na ostatni dostępny elemet kolejki zamiast inkrementacji wskaźnik jest zerowany. Pozwala to na płynne przesuwanie wskaźników bufor kołowy (ang. circular buffer). 32
33 Kolejka FIFO (3) Kolejka pusta T = H T H T T Dane w kolejce, ilość danych = H T H Brak miejsca w kolejce (T = 0) & (H = Size) lub T H = 1 H H T 33
34 Kolejka FIFO implementacja w C (1) #define BUFFERSIZE 0xFF /* FIFO buffer size and mask */ typedef struct FIFO { char buffer [BUFFERSIZE+1]; unsigned int head; unsigned int tail; }; void FIFO_Init (struct FIFO *Fifo); void FIFO_Empty (struct FIFO *Fifo); int FIFO_Put (struct FIFO *Fifo, char Data); int FIFO_Get (struct FIFO *Fifo, char *Data) void FIFO_Init (struct FIFO *Fifo){ Fifo->head=0; Fifo->tail=0; /* optional: initialize data in buffer with 0 */ } 34
35 Kolejka FIFO implementacja w C (2) void FIFO_Empty (struct FIFO *Fifo){ Fifo->head = Fifo->tail; /* now FIFO is empty*/ } int FIFO_Put (struct FIFO *Fifo, char Data){ if ((Fifo->tail-Fifo->head)==1 (Fifo->tail-Fifo->head)==BUFFERSIZE)){ return -1; }; /* FIFO overflow */ Fifo->buffer[Fifo->head] = Data; Fifo->head = (Fifo->head + 1) & BUFFERSIZE; return 1; /* Put 1 byte successfully */ } int FIFO_Get (struct FIFO *Fifo, char *Data){ If ((TxFifo.head!=TxFifo.tail)){ *Data = Fifo->buffer[Fifo->tail]; Fifo->tail = (Fifo->tail + 1) &BUFFERSIZE; return 1; /* Get 1 byte successfully */ } else return -1; /* No data in FIFO */ } 35
36 Kolejka FIFO pułapka void FIFO_Empty (struct FIFO *Fifo){ Fifo->head = Fifo->tail; /* now FIFO is empty*/ } int FIFO_Put (struct FIFO *Fifo, char Data){ if ((Fifo->tail-Fifo->head)==1 (Fifo->tail-Fifo->head)==BUFFERSIZE)){ return -1; }; /* FIFO overflow */ Fifo->buffer[Fifo->head++] = Data; Fifo->head = Fifo->head & BUFFERSIZE; /* be carefull with interrupts */ return 1; /* Put 1 byte successfully */ } int FIFO_Get (struct FIFO *Fifo, char *Data){ If ((TxFifo.head!=TxFifo.tail)){ *Data = Fifo->buffer[Fifo->tail++]; Fifo->tail &= BUFFERSIZE; /* be carefull with interrupts */ return 1; /* Get 1 byte successfully */ } else return -1; /* No data in FIFO */ } 36
37 Schematy elektryczne Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 37
, Zboczem sygnału (zmiana poziomu sygnału z '0' na '1' lub z '1' na '0').")
38 Sygnały cyfrowe Sygnały cyfrowe określają dwa parametry: f częstotliwość (okres), A amplituda. Układy cyfrowe mogą być wyzwalane: Zmianą poziomu (większy lub mniejszy poziom od poziomu odniesienia), Zboczem sygnału (zmiana poziomu sygnału z '0' na '1' lub z '1' na '0'). Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 38

39 Schematy elektryczne (1) Symbole zasilania Symbole masy Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 39
40 Schematy elektryczne (2) Electrical connections Connection No connection Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 40
41 Schematy elektryczne jak tego nie robić? Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 41
42 Schematy elektryczne lepszy sposób Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 42
43 Odczyt stanu przełącznika Polling loop Interrupt IRQ Sygnał asynchroniczny Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 43
44 44 Dioda elektroluminescencyjna Dioda elektroluminescencyjna, dioda świecąca LED (ang. light-emitting diode) dioda półprzewodnikowa, emitujących promieniowanie w zakresie światła widzialnego, podczerwieni lub ultrafioletu. Vcc=3V3 A K Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
45 45 Wyświetlacz siedmiosegmentowy LED Wyświetlacz siedmiosegmentowy jest wyświetlaczem zbudowanym z siedmiu segmentów pozwalających na wyświetlanie znaków dziesiętnych 0-9 oraz pozostałych znaku szesnastkowego (A-F). Wyświetlacze siedmiosegmentowe LED posiadają również dodatkowy, ósmy segment w postaci kropki dziesiętnej (H, dp). Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
46 Wyświetlacz siedmiosegmentowy LED Wyświetlacze dzielimy na układy: Ze wspólną anodą, Ze wspólną katodą. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 46

47 47 Wyświetlacz siedmiosegmentowy dekoder Tablica realizujące dekoder kodu BCD (binarny kod dziesiętny) na kod wyświetlacza 7-segmentowego (wspólna katoda). Jak wygląda tablica realizująca dekoder BCD na kod szesnastkowy? Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego

48 Płytka z wyświetlaczem LED Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 48
49 Enkoder obrotowy Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 49
50 50 Enkoder obrotowy Enkoder obrotowy (ang. rotary lub shaft encoder) jest elektromechanicznym urządzeniem wykorzystywanym do konwersji położenia kątowego do sygnału analogowego lub cyfrowego. Enkodery obrotowe wykorzystywane są w różnych aplikacjach wymagających precyzyjnego określenia położenia kątowego lub kierunku obrotu,np. Systemy sterowania, robotyka, specjalizowane obiektywy fotograficzne, urządzenia wejściowe do urządzeń komputerowych (myszki, tackball-e) oraz urządzenia radarowe. Wyróżniamy dwa rodzaje enkoderów podające położenie: Bezwzględne, Względne (przyrostowe). Enkodery bezwzględne generują unikalny kod cyfrowy dla różnych kątów obrotu. Enkodery przyrostowe, znane jako kwadraturowe, posiadają zwykle dwa wyprowadzenia. Do określenia zmiany kąta położenia wykorzystuje się różnicę faz wygenerowanych sygnałów. Enkodery mogą być mechaniczne lub optyczne. Optyczne enkodery wykorzystują cyfrowe mozaiki oparte na kodzie Graya. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
51 51 Przykłady enkoderów Precyzyjny pomiar przesunięcia, kąta obrotu Potencjometry cyfrowe Myszka komputerowa i enkodery optyczne Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
52 52 Enkodery kwadraturowe (1) Enkodery mechaniczne wymagają filtracji drgań styków mechanicznych. Ze względu na niską cenę wykorzystywane są jako potencjometry cyfrowe w sprzęcie audio (potencjometr regulujący głośność, sterowanie menu). Ze względu na drgania styków enkodery mechaniczne mają stosunkowo niską szybkość obrotową. Drgania styków enkodera mechanicznego Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
53 53 Enkodery kwadraturowe (2) Różnica faz sygnałów generowanych przez enkodery cyfrowe (sygnały A i B) pozwala na określenie kierunku obrotu. Częstotliwość generowanego przebiegu prostokątnego pozwala na określenie prędkości kątowej. Analogowy układ filtrujący drgania styków Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
54 54 Enkodery kwadraturowe (3) Wyjścia enkodera generują sygnał kwadraturowy różnica faz obu sygnałów wynosi 90 stopni. Odfiltrowane sygnały wykorzystywane są do generowania impulsów inkrementujących lub dekrementujących licznik. W systemach mikroprocesorowych wykorzystuje się wyzwalanie dowolnym zboczem lub poziomem sygnału generowanego przez enkoder. W celu wyznaczenia kierunku obrotu należy zaimplementować maszynę stanową, jeżeli poprzednim stanem było 00, a obecny stan wynosi 01 to enkoder obracany jest zgodnie ze wskazówkami zegara. Drgania styków mogą spowodować niewłaściwe działanie automatu stanowego, np. przejście 00->11 uniemożliwia określenie kierunku obrotu, mamy dwie możliwości: 00->01->11 oraz 00->10->11. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego

55 Enkodery kwadraturowe laboratorium Schemat elektryczny układu enkodera podłączonego do procesora AMR wykorzystywanego na zajęciach. Enkoder wymaga dobrego algorytmu filtrującego drgania styków. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 55

56 Płyta nakładkowa termometr, buzzer Złącze do procesora ARM Termometr cyfrowy JP24P PWM2 PWM3 V3 PB13 PB15 PB17 PB19 PB21 PB23 PB25 PB27 PB29 PB PB6 PB12 PB14 PB16 PB18 PB20 PB22 PB24 PB26 PB28 PB30 Układ buzzera V3 V5 HEADER 15X2 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 56
57 Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią, nowoczesna oferta edukacyjna i wzmacniania zdolności do zatrudniania osób niepełnosprawnych Prezentacja dystrybuowana jest bezpłatnie Politechnika Łódzka, ul. Żeromskiego 116, Łódź, tel. (042) Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 57
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu
 Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Pamięci i urządzenia peryferyjne Wprowadzenie do przedmiotu
 Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Wprowadzenie do przedmiotu Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw
 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Zaawansowane programowanie w języku C++ Zarządzanie pamięcią w C++
 Zaawansowane programowanie w języku C++ Zarządzanie pamięcią w C++ Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka
Zaawansowane programowanie w języku C++ Zarządzanie pamięcią w C++ Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
Programowanie Układów Logicznych kod kursu: ETD6203. Szczegóły realizacji projektu indywidualnego W dr inż.
 Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Architektura Systemów Komputerowych. Transmisja szeregowa danych Standardy magistral szeregowych
 Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Programowanie mikrokontrolerów. 15 stycznia 2008
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Interfejs urządzeń peryferyjnych
 Interfejs urządzeń peryferyjnych Terminy - Referaty do 08.05.2010 - Egzamin 09.05.2010 lub 22.05.2010 Typy transmisji informacji Transmisja informacji w komputerach odbywa się przy wykorzystaniu magistrali
Interfejs urządzeń peryferyjnych Terminy - Referaty do 08.05.2010 - Egzamin 09.05.2010 lub 22.05.2010 Typy transmisji informacji Transmisja informacji w komputerach odbywa się przy wykorzystaniu magistrali
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
System mikroprocesorowy i peryferia. Dariusz Chaberski
 System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
Urządzenia peryferyjne procesora ColdFire
 Urządzenia peryferyjne procesora ColdFire 1 Moduł generatora sygnału zegarowego (Clock Module) 2 Generator z pętlą PLL (1) Pętla synchronizacji fazy, pętla sprzężenia fazowego, PLL (ang. Phase Locked Loop)
Urządzenia peryferyjne procesora ColdFire 1 Moduł generatora sygnału zegarowego (Clock Module) 2 Generator z pętlą PLL (1) Pętla synchronizacji fazy, pętla sprzężenia fazowego, PLL (ang. Phase Locked Loop)
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Instrukcja do laboratorium Systemy wbudowane ARM 9 TDMI
 Instrukcja do laboratorium Systemy wbudowane ARM 9 TDMI 1 1. Regulamin pracy laboratorium a) Kategorycznie zabrania się: Zdejmowania obudów komputerów. Podłączania i odłączania jakichkolwiek przewodów
Instrukcja do laboratorium Systemy wbudowane ARM 9 TDMI 1 1. Regulamin pracy laboratorium a) Kategorycznie zabrania się: Zdejmowania obudów komputerów. Podłączania i odłączania jakichkolwiek przewodów
4 Transmisja szeregowa, obsługa wyświetlacza LCD.
 1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
Architektura komputerów Reprezentacja liczb. Kodowanie rozkazów.
 Architektura komputerów Reprezentacja liczb. Kodowanie rozkazów. Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka
Architektura komputerów Reprezentacja liczb. Kodowanie rozkazów. Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Programowanie Układów Logicznych kod kursu: ETD6203. Komunikacja z układami cyfrowymi W dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Zaawansowane programowanie w języku C++ Funkcje uogólnione - wzorce
 Zaawansowane programowanie w języku C++ Funkcje uogólnione - wzorce Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka
Zaawansowane programowanie w języku C++ Funkcje uogólnione - wzorce Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Współpraca procesora ColdFire z urządzeniami peryferyjnymi
 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Urządzenia peryferyjne RS-232. Wykład 2
 Urządzenia peryferyjne RS-232 Wykład 2 Transmisja szeregowa Poprzez kanały telekomunikacyjne Zaleta: niskie koszty Wymaga konwersji szeregowo/równoległej np. rejestr przesuwny Dwie metody: asynchroniczna
Urządzenia peryferyjne RS-232 Wykład 2 Transmisja szeregowa Poprzez kanały telekomunikacyjne Zaleta: niskie koszty Wymaga konwersji szeregowo/równoległej np. rejestr przesuwny Dwie metody: asynchroniczna
TECHNIKA MIKROPROCESOROWA II
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział IEiT Katedra Elektroniki TECHNIKA MIKROPROCESOROWA II LAB 6 Moduł UART - współpraca z komputerem poprzez BlueTooth Mariusz Sokołowski
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział IEiT Katedra Elektroniki TECHNIKA MIKROPROCESOROWA II LAB 6 Moduł UART - współpraca z komputerem poprzez BlueTooth Mariusz Sokołowski
Pośredniczy we współpracy pomiędzy procesorem a urządzeniem we/wy. W szczególności do jego zadań należy:
 Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Układy reprogramowalne i SoC Język VHDL (część 4)
") Język VHDL (część 4) Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki
Język VHDL (część 4) Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Architektura systemów komputerowych. dr Artur Bartoszewski
 Architektura systemów komputerowych dr Artur Bartoszewski Układy otoczenia procesora (chipset) Rozwiązania sprzętowe CHIPSET Podstawą budowy płyty współczesnego komputera PC jest Chipset. Zawiera on większość
Architektura systemów komputerowych dr Artur Bartoszewski Układy otoczenia procesora (chipset) Rozwiązania sprzętowe CHIPSET Podstawą budowy płyty współczesnego komputera PC jest Chipset. Zawiera on większość
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
ZL4PIC. Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
Dokumentacja Techniczna. Czytnik RFID UW-M4GM
 Dokumentacja Techniczna Czytnik RFID UW-M4RM UW-M4GM -man-2 1 WPROWADZENIE... 3 2 DANE TECHNICZNE... 4 3 OPIS ELEMENTÓW OBUDOWY... 5 4 KOMENDY PROTOKÓŁU MODBUS RTU... 6 4.1 Adresy MODBUS...7 2 1 Wprowadzenie
Dokumentacja Techniczna Czytnik RFID UW-M4RM UW-M4GM -man-2 1 WPROWADZENIE... 3 2 DANE TECHNICZNE... 4 3 OPIS ELEMENTÓW OBUDOWY... 5 4 KOMENDY PROTOKÓŁU MODBUS RTU... 6 4.1 Adresy MODBUS...7 2 1 Wprowadzenie
Architektura komputerów Historia systemów liczących
 Historia systemów liczących Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Historia systemów liczących Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD.
 13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
Układy sekwencyjne. Podstawowe informacje o układach cyfrowych i przerzutnikach (rodzaje, sposoby wyzwalania).
.") Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN
 MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
Mikroprocesor Operacje wejścia / wyjścia
 Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
PROCESORY SYGNAŁOWE - LABORATORIUM. Ćwiczenie nr 03
 PROCESORY SYGNAŁOWE - LABORATORIUM Ćwiczenie nr 03 Obsługa portu szeregowego, układu kodeka audio i pierwsze przetwarzanie sygnałów (cyfrowa regulacja głośności) 1. Konfiguracja układu szeregowego portu
PROCESORY SYGNAŁOWE - LABORATORIUM Ćwiczenie nr 03 Obsługa portu szeregowego, układu kodeka audio i pierwsze przetwarzanie sygnałów (cyfrowa regulacja głośności) 1. Konfiguracja układu szeregowego portu
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
Plan wykładu. 1. Urządzenia peryferyjne 2. Rodzaje transmisji danych 3. Interfejs COM 4. Interfejs LPT 5. Plug and Play
 Plan wykładu 1. Urządzenia peryferyjne 2. Rodzaje transmisji danych 3. Interfejs COM 4. Interfejs LPT 5. Plug and Play Urządzenia peryferyjne Komputer klasy PC musi zapewniać możliwość podłączenia różnorakich
Plan wykładu 1. Urządzenia peryferyjne 2. Rodzaje transmisji danych 3. Interfejs COM 4. Interfejs LPT 5. Plug and Play Urządzenia peryferyjne Komputer klasy PC musi zapewniać możliwość podłączenia różnorakich
AVREVB1. Zestaw uruchomieniowy dla mikrokontrolerów AVR. Zestawy uruchomieniowe www.evboards.eu
 AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Architektura systemów komputerowych. dr Artur Bartoszewski
 Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 4
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układy DMA, przetwornik cyfrowo-analogowy, transmisja
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układy DMA, przetwornik cyfrowo-analogowy, transmisja
1. Tworzenie nowego projektu.
 Załącznik do Instrukcji 1. Tworzenie nowego projektu. Wybieramy opcję z menu głównego New->QNX C Project. Wprowadzamy nazwę przechodzimy do następnego kroku NEXT. Wybieramy platformę docelową oraz warianty
Załącznik do Instrukcji 1. Tworzenie nowego projektu. Wybieramy opcję z menu głównego New->QNX C Project. Wprowadzamy nazwę przechodzimy do następnego kroku NEXT. Wybieramy platformę docelową oraz warianty
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
ZL16AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168
 ZL16AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168 ZL16AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerówavr w obudowie 28-wyprowadzeniowej (ATmega8/48/88/168). Dzięki
ZL16AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168 ZL16AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerówavr w obudowie 28-wyprowadzeniowej (ATmega8/48/88/168). Dzięki
Przerwania w systemie mikroprocesorowym. Obsługa urządzeo wejścia/wyjścia
 Przerwania w systemie mikroprocesorowym 1 Obsługa urządzeo wejścia/wyjścia W każdym systemie mikroprocesorowym oprócz pamięci programu i pamięci danych znajduje się szereg układów lub urządzeo wejścia/wyjścia,
Przerwania w systemie mikroprocesorowym 1 Obsługa urządzeo wejścia/wyjścia W każdym systemie mikroprocesorowym oprócz pamięci programu i pamięci danych znajduje się szereg układów lub urządzeo wejścia/wyjścia,
Enkoder magnetyczny AS5040.
 Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Instrukcja do laboratorium Systemy wbudowane ARM 9 TDMI
 Instrukcja do laboratorium Systemy wbudowane ARM 9 TDMI 1 1. Regulamin pracy laboratorium a) Zaliczenie laboratorium Obecność na zajęciach jest obowiązkowa. Dopuszczalna jest jedna nieusprawiedliwiona
Instrukcja do laboratorium Systemy wbudowane ARM 9 TDMI 1 1. Regulamin pracy laboratorium a) Zaliczenie laboratorium Obecność na zajęciach jest obowiązkowa. Dopuszczalna jest jedna nieusprawiedliwiona
o Instalacja środowiska programistycznego (18) o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)
 o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)") O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
ZL28ARM. Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC
 ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
Zaawansowane programowanie w języku C++ Wyjątki
 Zaawansowane programowanie w języku C++ Wyjątki Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń
Zaawansowane programowanie w języku C++ Wyjątki Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Spis treści. Dzień 1. I Konfiguracja sterownika (wersja 1312) II Tryby pracy CPU (wersja 1312) III Bloki funkcyjne (wersja 1312)
 II Tryby pracy CPU (wersja 1312) III Bloki funkcyjne (wersja 1312)") Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1312) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Tworzenie nowego projektu I-5 Tworzenie stacji poprzez wybór CPU z katalogu I-6 Dodawanie modułów
Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1312) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Tworzenie nowego projektu I-5 Tworzenie stacji poprzez wybór CPU z katalogu I-6 Dodawanie modułów
Wykład IV. Układy we/wy. Studia Podyplomowe INFORMATYKA Architektura komputerów
 Studia Podyplomowe INFORMATYKA Architektura komputerów Wykład IV Układy we/wy 1 Część 1 2 Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Studia Podyplomowe INFORMATYKA Architektura komputerów Wykład IV Układy we/wy 1 Część 1 2 Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Start Bity Bit Stop 1 Bit 0 1 2 3 4 5 6 7 Par. 1 2. Rys. 1
 Temat: Obsługa portu komunikacji szeregowej RS232 w systemie STRC51. Ćwiczenie 2. (sd) 1.Wprowadzenie do komunikacji szeregowej RS232 Systemy bazujące na procesorach C51 mogą komunikować się za pomocą
Temat: Obsługa portu komunikacji szeregowej RS232 w systemie STRC51. Ćwiczenie 2. (sd) 1.Wprowadzenie do komunikacji szeregowej RS232 Systemy bazujące na procesorach C51 mogą komunikować się za pomocą
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
Architektura Systemów Komputerowych. Bezpośredni dostęp do pamięci Realizacja zależności czasowych
 Architektura Systemów Komputerowych Bezpośredni dostęp do pamięci Realizacja zależności czasowych 1 Bezpośredni dostęp do pamięci Bezpośredni dostęp do pamięci (ang: direct memory access - DMA) to transfer
Architektura Systemów Komputerowych Bezpośredni dostęp do pamięci Realizacja zależności czasowych 1 Bezpośredni dostęp do pamięci Bezpośredni dostęp do pamięci (ang: direct memory access - DMA) to transfer
IIPW_SML3_680 (Z80) przewodnik do ćwiczeń laboratoryjnych
 przewodnik do ćwiczeń laboratoryjnych") IIPW_SML3_680 (Z80) przewodnik do ćwiczeń laboratoryjnych wrzesieo 2010 UWAGA: Moduł jest zasilany napięciem do 3.3V i nie może współpracowad z wyjściami układów zasilanych z wyższych napięd. Do pracy
IIPW_SML3_680 (Z80) przewodnik do ćwiczeń laboratoryjnych wrzesieo 2010 UWAGA: Moduł jest zasilany napięciem do 3.3V i nie może współpracowad z wyjściami układów zasilanych z wyższych napięd. Do pracy
ZL30ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F103
 ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
1. Wstęp Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE Rdzeń mikrokontrolerów ST7FLITE... 15
 3 1. Wstęp... 9 2. Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE... 11 3. Rdzeń mikrokontrolerów ST7FLITE... 15 3.1. Jednostka centralna...16 3.2. Organizacja i mapa pamięci...19 3.2.1. Pamięć RAM...20
3 1. Wstęp... 9 2. Różnice pomiędzy mikrokontrolerami ST7 a ST7LITE... 11 3. Rdzeń mikrokontrolerów ST7FLITE... 15 3.1. Jednostka centralna...16 3.2. Organizacja i mapa pamięci...19 3.2.1. Pamięć RAM...20
HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy bufor dwukierunkowy HC244 dwa 4-bitowe bufory jednokierunkowe
 Bufory (BUFFER) Bufory stosuje się po to by: - zwiększyć obciążalność magistrali - chronić układ wysokiej skali integracji - sterować przepływem danych HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy
Bufory (BUFFER) Bufory stosuje się po to by: - zwiększyć obciążalność magistrali - chronić układ wysokiej skali integracji - sterować przepływem danych HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy
Studia podyplomowe realizowane w ramach zadania 5 Systemy mobilne i techniki multimedialne
 Studia podyplomowe realizowane w ramach zadania 5 Systemy mobilne i techniki multimedialne Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie
Studia podyplomowe realizowane w ramach zadania 5 Systemy mobilne i techniki multimedialne Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Politechnika Łódzka. Instytut Systemów Inżynierii Elektrycznej
 Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium komputerowych systemów pomiarowych Ćwiczenie 8 Wykorzystanie modułów FieldPoint w komputerowych systemach pomiarowych 1. Wprowadzenie
Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium komputerowych systemów pomiarowych Ćwiczenie 8 Wykorzystanie modułów FieldPoint w komputerowych systemach pomiarowych 1. Wprowadzenie
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
Instrukcja Obsługi. Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH
 Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych. Instrukcja do ćwiczenia laboratoryjnego
 Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 rev. 05.2018 1 1. Cel ćwiczenia Doskonalenie umiejętności obsługi
Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 rev. 05.2018 1 1. Cel ćwiczenia Doskonalenie umiejętności obsługi
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
2.1 Porównanie procesorów
 1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701. SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701.
 SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw
 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Płyta główna (ang. motherboard) najważniejsza płyta drukowana urządzenia elektronicznego, na której zamontowano najważniejsze elementy urządzenia, umo
 najważniejsza płyta drukowana urządzenia elektronicznego, na której zamontowano najważniejsze elementy urządzenia, umo") Zestaw komputera: 1)Płyta główna: 2)Monitor 3)Klawiatura i mysz 4)Głośniki 5) Urządzenia peryferyjne: *skaner *drukarka Płyta główna (ang. motherboard) najważniejsza płyta drukowana urządzenia elektronicznego,
Zestaw komputera: 1)Płyta główna: 2)Monitor 3)Klawiatura i mysz 4)Głośniki 5) Urządzenia peryferyjne: *skaner *drukarka Płyta główna (ang. motherboard) najważniejsza płyta drukowana urządzenia elektronicznego,
Procesory ARM w systemach wbudowanych Programowanie procesorów ARM
 Programowanie procesorów ARM Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Programowanie procesorów ARM Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Badanie układów średniej skali integracji - ćwiczenie Cel ćwiczenia. 2. Wykaz przyrządów i elementów: 3. Przedmiot badań
 adanie układów średniej skali integracji - ćwiczenie 6. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi układami SSI (Średniej Skali Integracji). Przed wykonaniem ćwiczenia należy zapoznać
adanie układów średniej skali integracji - ćwiczenie 6. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi układami SSI (Średniej Skali Integracji). Przed wykonaniem ćwiczenia należy zapoznać
Zaawansowane programowanie w języku C++ Przeciążanie operatorów
 Zaawansowane programowanie w języku C++ Przeciążanie operatorów Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka
Zaawansowane programowanie w języku C++ Przeciążanie operatorów Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka
Architektura komputera. Cezary Bolek. Uniwersytet Łódzki. Wydział Zarządzania. Katedra Informatyki. System komputerowy
 Wstęp do informatyki Architektura komputera Cezary Bolek cbolek@ki.uni.lodz.pl Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki System komputerowy systemowa (System Bus) Pamięć operacyjna ROM,
Wstęp do informatyki Architektura komputera Cezary Bolek cbolek@ki.uni.lodz.pl Uniwersytet Łódzki Wydział Zarządzania Katedra Informatyki System komputerowy systemowa (System Bus) Pamięć operacyjna ROM,
ĆWICZENIE 5. TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM
 ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
Programowalne Układy Cyfrowe Laboratorium
 Zdjęcie opracowanej na potrzeby prowadzenia laboratorium płytki przedstawiono na Rys.1. i oznaczono na nim najważniejsze elementy: 1) Zasilacz i programator. 2) Układ logiki programowalnej firmy XILINX
Zdjęcie opracowanej na potrzeby prowadzenia laboratorium płytki przedstawiono na Rys.1. i oznaczono na nim najważniejsze elementy: 1) Zasilacz i programator. 2) Układ logiki programowalnej firmy XILINX
Programowalne układy logiczne kod kursu: ETD Układy sekwencyjne W
 Programowalne układy logiczne kod kursu: ETD008270 Układy sekwencyjne W6 10.05.2019 mgr inż. Maciej Rudek Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu
Programowalne układy logiczne kod kursu: ETD008270 Układy sekwencyjne W6 10.05.2019 mgr inż. Maciej Rudek Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Układ transmisji szeregowej AVR
 Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Wydział Elektryczny. Katedra Telekomunikacji i Aparatury Elektronicznej. Konstrukcje i Technologie w Aparaturze Elektronicznej.
 Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Konstrukcje i Technologie w Aparaturze Elektronicznej Ćwiczenie nr 5 Temat: Przetwarzanie A/C. Implementacja
Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Konstrukcje i Technologie w Aparaturze Elektronicznej Ćwiczenie nr 5 Temat: Przetwarzanie A/C. Implementacja
Kod produktu: MP01611
 CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
SZYMAŃSKI ŁÓDŹ Ul. Wiskicka 22 Tel./fax. (042) Tel./fax. (042) Kom
 Tel./fax. (042) Kom") SZYMAŃSKI 93-623 ŁÓDŹ Ul. Wiskicka 22 Tel./fax. (042) 645 92 66 Tel./fax. (042) 250 50 52 Kom. 0 604 938 830 INSTRUKCJA WSAŹNIKA POŁOŻEŃ PRZEŁĄCZNIKA ZACZEPÓW TYPU WNZT 25a Opracował: Edward Szymański
SZYMAŃSKI 93-623 ŁÓDŹ Ul. Wiskicka 22 Tel./fax. (042) 645 92 66 Tel./fax. (042) 250 50 52 Kom. 0 604 938 830 INSTRUKCJA WSAŹNIKA POŁOŻEŃ PRZEŁĄCZNIKA ZACZEPÓW TYPU WNZT 25a Opracował: Edward Szymański