Analiza mechanizmu powstawania śladów na jezdni w wyniku zderzenia prostopadłego samochodów w ruchu
|
|
|
- Wojciech Czech
- 5 lat temu
- Przeglądów:
Transkrypt
1 GIDLEWSKI Mirosław 1 JEMIOŁ Leszek 2 Analiza mechanizmu powstawania śladów na jezdni w wyniku zderzenia prostopadłego samochodów w ruchu WSTĘP W Przemysłowym Instytucie Motoryzacji w Warszawie prowadzone są badania zderzeń samochodów w ruchu. Jednym z celów takich badań jest rozpoznanie i opisanie mechanizmów powstawania śladów na drodze na skutek zderzenia. Zakłada się, że wyniki prowadzonych badań pomogą w identyfikacji, interpretacji i zabezpieczaniu śladów pozostawionych na drodze w rzeczywistych wypadkach drogowych. Prawidłowo rozpoznane i opisane ślady wypadku drogowego zdecydowanie ułtwiają jego rekonstrukcję, co z kolei umożliwia jednoznaczne ustalenie przyczyn i sprawców wypadku. Zderzenie czołowo-boczne pojazdów powoduje gwałtowne zmiany parametrów ich ruchu. W wyniku zderzenia zmieniają się kierunki ruchu i prędkości poruszania się samochodów. Pojazdy zwykle tracą stateczność kierunkową i zaczynają poruszać się ruchem postępowo obrotowym w pełnym poślizgu. Tak znaczne i gwałtowne zmiany stanu ruchu samochodów muszą powodować powstawanie śladów na drodze. Mechanizm powstawania tych śladów nie jest jednak oczywisty, zależy bowiem od wielu czynników. Daltego też badania pozwalające pokazać przyczny powstawania śladów na drodze należy uznać za zasadne. Analiza mechanizmu powstawania śladów na drodze zostanie przeprowadzona na podstawie wyników uzyskanych w czasie jednej, ze zrealizowanych w PIMOT, fizycznych symulacji zderzenia czołowo-bocznego dwóch samochodów w ruchu. 1 WARUNKI PRZEPROWADZENIA PRÓBY ZDERZENIOWEJ Wybrany do analizy test zderzeniowy polegał na uderzeniu przodem samochodu Honda Accord poruszającego się z prędkością 53 km/h w tylne lewe koło samochodu tej samej marki i modelu, poruszającego się z prędkością dwukrotnie mniejszą. W chwili pierwszego kontaktu zderzających się samochodów wzdłużna oś symetrii pojazdu A była prostopadła do wzdłużnej osi symetrii pojazdu B (rysunek 1). Przed zderzeniem, w czasie zderzenia i po zderzeniu pojazdy nie były hamowane. Hamowanie samochodu mogło być uruchamiane z zewnątrz tylko w przypadku opuszczenia przez pojazd obszaru przeznaczonego na badania. Koła kierownicy w obydwu samochodach były swobodne. Tab. 1. Wybrane dane techniczne samochodów wykorzystanych w teście zderzeniowym Opis Samochód A Samochód B Masa m, [kg] Odległość środka masy od osi przedniej l 1 [m] 1,18 1,13 Rozstaw osi L [m] 2,677 2,670 Odległość punktu pierwszego kontaktu samochodów (punkt Z rysunek 1) od osi przedniej samochodu y i [m] 0,88-2,71 Odległość punktu pierwszego kontaktu samochodów od środka masy samochodu y i2 [m] 2,06-1,58 1 Uniwersytet Technologiczno-Humanistyczny im. Kazimierza Pułaskiego w Radomiu, Wydział Mechaniczny, Instytut Eksploatacji Pojazdów i Maszyn; Radom; ul. Chrobrego 45. Tel: , miroslaw.gidlewski@uthrad.pl, Przemysłowy Instytut Motoryzacji w Warszawie; Warszawa, ul. Jagiellońska 55 2 Uniwersytet Technologiczno-Humanistyczny im. Kazimierza Pułaskiego w Radomiu, Wydział Mechaniczny, Instytut Eksploatacji Pojazdów i Maszyn; Radom; ul. Chrobrego 45. Tel: , leszek.jemiol@uthrad.pl 3878

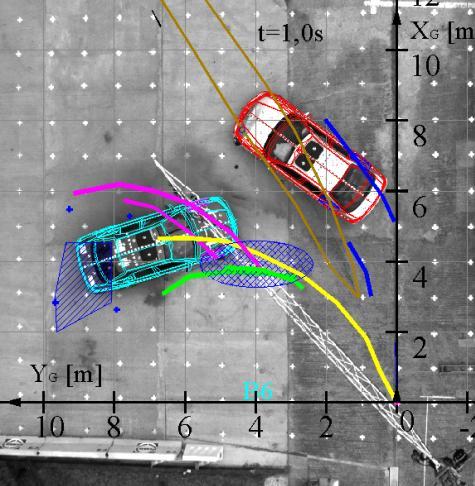
2 Rys. 1. Usytuowanie wzajemne samochodów w chwili zderzenie Test zderzeniowy został przeprowadzony na placu badawczym PIMOT na szorstkiej, suchej nawierzchni betonowej. W tabeli 1 przedstawiono niektóre dane techniczne samochodów biorących udział w teście zderzeniowym oraz opisano położenie punktu pierwszego kontaktu pojazdów. W samochodach badawczych, w punktach odpowiadających ich środkom masy, zamontowane były trzyosiowe czujniki przyspieszeń oraz czujniki mierzące prędkości kątowe nadwozi samochodów względem trzech osi. Czujniki były montowane w taki sposób, aby kierunki i zwroty osi czujników były zgodne z kierunkami i zwrotami osi lokalnych układów współrzędnych związanych z samochodami wykorzystywanymi w badaniach. Na kole kierownicy każdego z pojazdów zamontowane zostały czujniki kąta obrotu. Każdy z samochodów był wyposażony w sterowany z zewnątrz siłownik pneumatyczny połączony z pedałem hamulca, umożliwiający rozpoczęcie hamowania pojazdu w dowolnej fazie testu. Próba zderzeniowa była filmowana przez kilkanaście kamer, w tym pięć kamer specjalnych rejestrujących 1000 klatek na sekundę. Dwie z szybkich kamer rejestrowały przebieg zderzenia z góry, jedna kamera z wysokości 8m, druga z wysokości 22m. 2 ŚLADY POZOSTAWIONE NA JEZDNI W WYNIKU ZDERZENIA SAMOCHODÓW Po przeprowadzeniu próby zderzeniowej dokładnie obejrzano i opisano miejsce zderzenia. W trakcie oględzin miejsca zdarzenia ujawnienie na nawierzchni jezdni następujące ślady (rysunek 2): położenie samochodów A i B po zderzeniu, ślady hamowania samochodu A w końcowej fazie ruchu, ślady rozlanej cieczy z układu chłodzenia silnika samochodu A, krzywoliniowe ślady zarzucania samochodu A, krzywoliniowe ślady zarzucania samochodu B, obszar występowania kawałków błota oderwanego od podwozi samochodów. Ujawnione ślady oraz ich rozmieszczenie przedstawiono na rysunku 2, na tle układu współrzędnych O G X G Y G Z G związanego z ziemią. Początek układu współrzędnych O G pokrywa z punktem pierwszego kontaktu zderzających się samochodów (punkt Z rysunek 1). Osie układu współrzędnych pokazują kierunki i zwroty prędkości samochodu A (oś X G ) i samochodu B (oś Y G ) w chwili pierwszego kontaktu. Samochód A zatrzymał się w znacznej odległości od miejsca zderzenia po przejechaniu ok. 29m. Ponadto zatrzymanie samochodu zostało wymuszone intensywnym hamowaniem, gdyż istniało zagrożenie wyjechania pojazdu poza obszar prowadzenia badań. Tor ruchu samochodu A po zderzeniu pokazują w przybliżeniu ślady rozlanej na jezdni cieczy pochodzącej z uszkodzonego, w wyniku zderzenia, układu chłodzenia tego pojazdu. Kształt śladów rozlanej cieczy jest na początku 3879
3 krzywoliniowy a potem prostoliniowy, aż do zatrzymania się samochodu. Na końcu śladów rozlanej cieczy widoczne są ślady intensywnego hamowania samochodu A. Ślady mają różną długość. Ślad lewy, krótszy kończy się przy kole tylnym lewym, a ślad prawy dłuższy kończy się przy kole przednim prawym samochodu A w położeniu powypadkowym. W pobliżu początku śladów rozlanej cieczy (z ich prawej strony rysunek 2) ujawniono dwa ślady tarcia opon o nawierzchnię jezdni. Ślady te były zapewne znaczone przez tylne koła samochodu A. Warto zwrócić uwagę, że samochód A pozostawił pierwsze ślady na jezdni (rozlana ciecz z układu chłodzenia) po przejechaniu ok. 3m od miejsca pierwszego kontaktu i to tylko dlatego, że została uszkodzona chłodnica znajdująca się z przodu samochodu. Ślady tarcia kół zostały pozostawione przez koła tylne, a więc po przejechaniu dłuższej drogi przez samochód A. Rys. 2. Ślady pozostawione na drodze na skutek zderzenia i ich rozmieszczenie 3880
4 Samochód B zatrzymał się znacznie bliżej miejsca zderzenia niż samochód A i zaczął znaczyć ślady na jezdni praktycznie już w miejscu pierwszego kontaktu z drugim pojazdem. Był to ślad tarcia (ślad oznaczony kolorem żółtym na rysunku 2) pozostawiony przez koło tylne lewe samochodu, czyli koło, w które nastąpiło uderzenie. Interesujące, że koło to, mimo że pozostawiło na jezdni ślad znacznej długości, nie znaczyło śladu tarcia aż do zatrzymania się samochodu. Ujawniono również ślady tarcia na jezdni pozostawione przez pozostałe koła samochodu B. Ślady te pojawiły się jednak w większej odległości od miejsca zderzenia niż ślad tarcia koła tylnego lewego. W odległości ok. 5 6m od miejsca zderzenia znajdował się obszar kawałków błota oderwanego od podwozi samochodów. Obszar ten miał kształt elipsy o długości 2m i szerokości 1m. Obszar rozrzuconego błota znajduje się również w miejscu położenia samochodu B po wypadku. 3 ZMIANY WARTOŚCI PARAMETRÓW RUCHU SAMOCHODÓW A I B W CZASIE I PO ZDRZENIU Zmiany wartości parametrów ruchu samochodów A i B w czasie zderzenia i po zderzeniu wyznaczono metodą całkowania danych zarejestrowanych przez czujniki przyspieszeń i prędkości kątowej umieszczone w punktach odpowiadających środkom mas badanych samochodów [2, 3 i 4]. Wyniki obliczeń skonfrontowano z wynikami analizy klatka po klatce filmów zarejestrowanych przez kamery umieszczone nad miejscem zderzenia samochodów. Porównanie pokazało prawie idealną zgodność położeń sylwetek samochodów na jezdni (wynikajacych z obliczeń) z położeniami pojazdów na jezdni zarejestrowanymi przez kamery w kolejnych fazach zderzenia [1, 3, 4 i 5]. Fakt ten pozwolił uznać wyniki pomiarów przyspieszeń środków mas samochodów i prędkości odchylania pojazdów za prawidłowe, a zastosowane procedury wyznaczania zmian wartości parametrów ruchu samochodów w czasie zderzenia i po zderzeniu za poprawne i wiarygodne, a więc możliwe do wykorzystania w analizie mechanizmow powtawania śladów na jezdni w wyniku zderzenia pojazdów. Przeprowadzone obliczenia pozwoliły wyznaczyć (dla samochodów A i B), wywołane zderzeniem pojazdów, przebiegi zmian następujących wielkości: prędkości wzdłużnej, poprzecznej i wypadkowej, prędkości kątowej względem osi pionowej, trajektorii ruchu środka masy, kąta przechyłu poprzecznego nadwozia, kąta obrotu pojazdu względem osi pionowej, kąta znoszenia środka masy, kąta obrotu koła kierownicy, opóźnienia środka masy zrzutowanego na kierunek jego prędkości wypadkowej. Przebiegi zmian w/w wielkości przedstawiono na rysunku 3 i 4. Zostaną one wykorzystane do opisu zachowań pojazdów w czasie i po zderzeniu. 3881
5 Samochód A Samochód B a) Wartości składowej prędkości wzdłużnej U i poprzecznej V oraz prędkość wypadkowa środka masy b) Prędkości kątowe względem osi pionowej c) Tory ruchu samochodów w układzie O G X G Y G Z G d) Kąt przechyłu poprzecznego nadwozia względem osi wzdłużnej samochodu Rys. 3 Wielkości opisujące ruch samochodów w czasie i po zderzeniu 3882
6 Samochód A Samochód B a) Kąt obrotu nadwozia względem osi pionowej b) Kąt znoszenia środka masy c) Kąt obrotu koła kierownicy d) Przyspieszenie środka masy zrzutowane na kierunek prędkości wypadkowej Rys. 4 Wielkości opisujące ruch samochodów w czasie i po zderzeniu c. d. 3883
7 4 ZACHOWANIE SIĘ SAMOCHODÓW W CZASIE I PO ZDERZENIU Samochody pozostawały w bezpośrednim kontakcie w czasie zderzenia przez ok. 0,14s. W tym czasie w samochodzie A: wypadkowa prędkość postępowa samochodu zmniejszyła się z 14,7m/s do 10 m/s (rysunek 3a) a kierunek wektora prędkości, odchylił się od kierunku przed zderzeniem w lewo o kąt ok. 6 o (rysunek 3c), samochód utracił stateczność kierunkową i zaczął obracać się względem osi pionowej w lewo z prędkością ok. ok. 100 o /s (rysunek 3b), nadwozie samochodu przechyliło się o nieznaczny kąt (ok. 2 o ) w lewo (rysunek 3d), koło kierownicy obróciło się o kąt ok. 30 o w lewo (rysunek 4c). Po rozdzieleniu się pojazdów samochód A poruszał się nadal ruchem niestatecznym krzywoliniowym w lewo przez ok. 0,9s. W tym czasie: prędkość wypadkowa środka masy samochodu zmniejszała się ze średnim opóźnieniem ok. 1,7m/s 2 (rysunek 3a i 4d) a kierunek wektora prędkości wypadkowej odchylał się coraz bardziej w lewo od kierunku przed zderzeniem (rysunek 3c), a jednocześnie coraz bardziej odchylał się w prawo od osi wzdłużnej pojazdu, tzn. wolno wzrastała wartość kąta znoszenia środka masy (rysunek 4b), gwałtownie zmniejszała się prędkość kątowa pojazdu względem osi pionowej (rysunek 3b), nadwozie samochodu wykonywało nieznaczne drgania poprzeczne względem osi wzdłużnej pojazdu (rysunek 3d), koło kierownicy obracało się bardzo szybko w prawo (rysunek 4c). Po upływie ok. 1s od chwili pierwszego kontaktu samochód A zaczął odzyskiwać kierowalność. W tym momencie wartość prędkości postępowej środka masy wynosiła ok. 8,3m/s, a prędkość kątowa pojazdu względem osi pionowej zmalała do zera (rysunek 3a i 3b). Ponieważ koła kierowane samochodu były skręcone o znaczny kąt w prawo (rysunek 4c) samochód zaczął poruszać się po łuku w prawo (rysunek 3c, 4a). Po upływie kolejnych 0,6s w wyniku działania momentu stabilizacyjnego koło kierownicy ustawiło się do jazdy na wprost i samochód rozpoczął ruch prostoliniowy tocząc się swobodnie (rysunek 3 i 4). W końcowej fazie ruchu samochód był intensywnie hamowany (rysunek 3a i 4d) w celu uniemożliwienia mu wyjechania poza obszar badań. W czasie pozostawania w bezpośrednim kontakcie z samochodem A w samochodzie B: wypadkowa prędkość postępowa samochodu nieznacznie zmniejszyła się z 7,4m/s do 7,0 m/s (rysunek 3a) a kierunek wektora prędkości, odchylił się w prawo o kąt ok. 36 o od kierunku przed zderzeniem (rysunek 3c), samochód utracił stateczność kierunkową i zaczął obracać się względem osi pionowej w lewo z dużą prędkością kątową ok. 270 o /s (rysunek 3b), nadwozie samochodu przechyliło się o bardzo duży kąt (ok. 9 o ) względem wzdłużnej osi symetrii w lewo (rysunek 3d), koło kierownicy zaczęło się obracać w prawo i na końcu zderzenia obróciło się o kąt ok. 50 o (rysunek 4c). Po rozdzieleniu się pojazdów samochód B poruszał się nadal ruchem niestatecznym krzywoliniowym i nie odzyskał kierowalności aż do zatrzymania się. Samochód zatrzymał się po upływie ok. 1,9s od chwili pierwszego kontaktu. W tym czasie: prędkość wypadkowa środka masy samochodu zmniejszała się lub zwiększała ze zmiennym przyspieszeniem lub opóźnieniem (rysunek 3a i 4d); dopiero w końcowej fazie ruchu po upływie ok. 1s od pierwszego kontaktu prędkość wypadkowa zaczęła regularnie zmniejszać się ze średnim opóźnieniem wynoszącym ok. 5m/s 2 ; kierunek wektora prędkości wypadkowej początkowo prawie nie zmieniał się, dopiero w końcowej fazie ruchu uległ znacznemu odchyleniu w lewo (rysunek 3c); zmieniała się natomiast zacznie wartość kąta znoszenia środka masy (rysunek 4b), 3884
8 prędkość kątowa pojazdu względem osi pionowej zmniejszała się szybko lecz nieregularnie, a w okresie 0,9 1,3s od chwili pierwszego kontaktu utrzymywała nawet w przybliżeniu stałą wartość (rysunek 3b), nadwozie samochodu wykonywało drgania poprzeczne względem osi wzdłużnej pojazdu o bardzo dużej amplitudzie (rysunek 3d); amplituda drgań nadwozia wyraźnie zmniejszyła się dopiero po upływie 1s od chwili pierwszego kontaktu. koło kierownicy obracało się bardzo szybko w prawo, osiągając maksymalny kąt obrotu ok. 550 o po upływie ok. 0,6s od chwili pierwszego kontaktu; potem kąt obrotu koła kierownicy zaczął bardzo szybko i regularnie zmniejszać się aby w końcowej fazie ruchu pojazdu osiągnąć wartość zbliżoną do zera (rysunek 4c). 5 MECHANIZM POWSTAWANIA ŚLADÓW NA JEZDNI W CZASIE I PO ZDERZENIU Mechanizm powstawania śladów na drodze zostanie wyjaśniony na podstawie wyników obliczeń (rysunki 3 i 4) oraz na podstawie analizy filmu zarejestrowanego przez kamerę umieszczoną na wysokości 22m. Na rysunku 5 przedstawiono położenia samochodów A i B na jezdni w charakterystycznych chwilach zderzenia. Na położenia samochodów na jezdni w kolejnych chwilach czasowych (wynikające z analizy klatka po klatce filmu zarejestrowanego przez kamerę) nałożono sylwetki samochodu, których położenie na jezdni wynika z przeprowadzonych obliczeń. Prawie identyczna zgodność położeń samochodów na jezdni ustalonych dwoma różnymi metodami potwierdza dużą dokładność wyników pomiarów i obliczeń. Z obliczeń wynika, że samochód A poruszał się ruchem niestatecznym przez około 1 1,2s (rysunek 3b i 4b) od chwili pierwszego kontaktu. W tym czasie pokonał drogę około 11m (rysunek 3c). Tylko na obszarze, po którym samochód A poruszał się ruchem niestatecznym można było oczekiwać powstania śladów tarcia opon samochodu na nawierzchni jezdni. Ślady zarzucania kół samochodu A pojawiły się dopiero w ostatniej fazie utraty stateczności kierunkowej przez ten pojazd, tzn. po upływie około 0,7s od chwili pierwszego kontaktu z samochodem B. Ślad tarcia na jezdni zaczęło znaczyć najpierw koło tylne lewe (rysunek 5c) a następnie po upływie 0,1s koło tylne prawe (rysunek 5d). Koło tylne prawe znaczyło ślad tarcia na drodze około 3,5m, aż do miejsca i czasu odzyskania kierowalności przez samochód A (rysunek 5g). Na rysunku 5g pokazano położenie samochodu A na jezdni w chwili odzyskania kierowalności. Koła samochodu A nie znaczyły wcześniej śladów tarcia na drodze, gdyż kąt znoszenia samochodu A (rysunek 4b), a więc także kąt znoszenia kół osi przedniej i tylnej był stosunkowo mały. Warto zwrócić uwagę, że płyn z uszkodzonej chłodnicy samochodu A pojawił się już po czasie ok. 0,3s od chwili zderzenia po, przejechaniu przez pojazd A drogi długości ok. 3m. Ponadto koła samochodu A pozostawiły na jezdni ślady intensywnego hamowania pojazdu tuż przed jego zatrzymaniem się (rysunek 2, 3a i 4d). Ślady pozostawione na jezdni przez samochód A nie dają podstaw do usytuowania tego pojazdu na jezdni w chwili pierwszego kontaktu z samochodem B. Obliczenia pokazują, że samochodu B poruszał się ruchem niestatecznym, postępowo-obrotowym w pełnym poślizgu od miejsca zderzenia aż do miejsca zatrzymania się. Ruch samochodu trwał ok. 1,9s a pojazd w tym czasie pokonał drogę około 8m. Na całym obszarze pokonanym ruchem niestatecznym można było oczekiwać śladów tarcia opon samochodu B na nawierzchni jezdni. Z rysunku 5a wynika, że pierwszy ślad tarcia na jezdni rozpoczął się już w chwili i w miejscu zderzenia. Ślad ten był znaczony przez tylne lewe koło samochodu na drodze około 9m (ślad koloru żółtego) w czasie ok. 0,7s. Koło tylne prawe, mimo że było znoszone pod bardzo dużym kątem podobnie jak koło lewe, to nie znaczyło śladu tarcia przez ok. 0,2s od chwili zderzenia. Było to spowodowane oderwaniem tego koła od nawierzchni (rysunek 3d). Koło tylne prawe zaczęło znaczyć ślad zarzucania gdy samochód przechylił się na prawą stronę (rysunek 5b ślad koloru zielonego). Koła tylne samochodu przestały znaczyć ślady tarcia po upływie około 0,7s od chwili pierwszego kontaktu (rysunek 5c). Stało się to w momencie, gdy kąt znoszenia kół osi tylnej był bliski zeru. Praktycznie w chwili, w której ślad tarcia na jezdni przestają znaczyć koła tylne rozpoczyna znaczenie 3885
 e) f)")



9 a) b) c) d) e) f) g) h) Rys. 5. Mechanizm powstawania śladów na jezdni 3886
10 znaczenie śladu zarzucania na jezdni koło przednie lewe (rysunek 5c lewy ślad koloru fioletowego) a po upływie 0,3s koło przednie prawe (rysunek 5e prawy ślad koloru fioletowego). Ślady znaczone przez koła przednie kończą się w miejscu pierwotnego zatrzymania się samochodu (rysunek 5h). Samochód B po chwilowym zatrzymaniu przetoczył się potem (z nieznanych przyczyn) prostoliniowo do tyłu o ok. 0,4m przyjmując pozycję powypadkową (rysunek 2). Ślady pozostawione przez samochód B pozwalają jednoznacznie usytuować ten pojazd na jezdni w miejscu pierwszego kontaktu oraz w miejscu zatrzymania się po zderzeniu. Samochód ten bowiem poruszając się ruchem niestatecznym pozostawił na jezdni liczne ślady tarcia, które były skutkiem bardzo dużych kątów znoszenia środka masy (rysunek 4b) oraz bardzo duzych kątów znoszenia kół osi przedniej i tylnej. Uwzględnienie miejsc i kształtów uszkodzeń samochodu A i B pozwala również ustalić położenie samochód A na jezdni w chwili zaistnienia zderzenia. Na jezdni odnotowano również ślady rozrzuconego błota. Kawałki błoto oderwały się od podwozia samochodu B na skutek gwałtownych drgań poprzecznych tego pojazdu. Warto zwrócić uwagę, że pole pokryte rozrzuconym błotem znajdowało się w odległości 5 6m od miejsca pierwszego kontaktu pojazdów i nie może być wykorzystane do ustalania miejsca zderzenia samochodów. WNIOSKI Przeprowadzona fizyczna symulacja zderzenia czołowo-bocznego samochodów pozwoliła pokazać rodzaje śladów powstających w wyniku zderzenia pojazdów oraz usytuowanie tych śladów na drodze. Przeprowadzone obliczenia oraz film zarejestrowany przez szybką kamerę umieszczoną wysoko nad miejscem zderzenia pozwoliły wyjaśnić mechanizm powstawania śladów zderzenia samochodów na drodze. Samochód A uderzający przodem w tylne koło samochodu B utracił w wyniku zderzenia stateczność kierunkową, ale już po upływie ok. 1s odzyskał kierowalność. Z powodu niewielkich kątów znoszenia środka masy pojazdu oraz kątów znoszenia jego kół przednich i tylnych, ślady tarcia opon na jezdni były krótkie i pojawiły się dopiero w końcowej fazie niestatecznego ruchu pojazdu. Nie mogą być więc wykorzystywane do ustalania położenia pojazdu na jezdni w chwili pierwszego kontaktu z drugim pojazdem. Miejsce oznaczają koniec śladu zarzucania tylnego koła prawego samochodu, może być co najwyżej wykorzystane do ustalania przybliżonego położenia samochodu na jezdni w chwili odzyskania kierowalności. Tor ruchu po zderzeniu przodu samochodu A został pokazany w miarę dokładnie przez płyn wyciekający z uszkodzonej w czasie zderzenia chłodnicy samochodu. Płyn ten na jezdni pojawił się już w odległości ok. 3m od miejsca zderzenia i znaczył tor ruchu samochodu A aż do jego zatrzymania się. Samochód B uderzony w tylne koło przez przód samochodu A utracił w wyniku zderzenia stateczność kierunkową i nie odzyskał kierowalności aż do zatrzymania się. Z powodu dużych kątów znoszenia środka masy samochodu w czasie ruchu niestatecznego koła jezdne samochodu zaznaczyły na jezdni liczne ślady tarcia. Praktycznie już w miejscu zderzenia zaczęło znaczyć ślad tarcia koło tylne lewe, a kilka metrów dalej również koło tylne prawe. W chwili, w której koła tylne kończyły znaczenie śladów zarzucania na jezdni rozpoczynały znaczyć ślady tarcia koła przednie (najpierw koło przednie lewe, potem koł przednie prawe). Ślady te kończyły się w miejscu zatrzymania się kół przednich samochodu po zderzeniu. Ślady znaczone przez koła samochodu B pozwalają jednoznacznie usytuować samochód B na jezdni w miejscu pierwszego kontaktu oraz w miejscu zatrzymania się po zderzeniu. W przypadku, gdy samochody po zderzeniu nie odzyskują kierowalności aż do zatrzymania się to trajektorie ich ruchu są w przybliżeniu prostoliniowe i łatwe do przewidzenia na podstawie analizy śladów pozostawionych przez opony na drodze. Stwierdzenie to jest ważne nawet w przypadku, gdy koła jezdne samochodu po zderzeniu nie są intensywne hamowane. Inaczej jest w przypadku, gdy samochody po zderzeniu odzyskują kierowalność a ich koła są hamowane z małą intensywnością lub toczą się swobodnie. W takim przypadku trajektorie ruchu samochodu po odzyskaniu kierowalności istotnie zależą od wartość wektora prędkości środka masy samochodu oraz od jego zwrotu (do przodu lub do tyłu) w chwili odzyskania kierowalności, a także 3887
11 od wartości kąta skrętu kół kierowanych (w czasie ruchu niestatecznego koła kierowane skręcają się często o znaczny kąt). Streszczenie W artykule przedstawiono analizę mechanizmu powstawania śladów na drodze w wyniku zderzenia czołowo-bocznego dwóch samochodów osobowych w ruchu. Analizę przeprowadzono na podstawie wyników badań przeprowadzonych w Przemysłowym Instytucie Motoryzacji polegających na fizycznej symulacji zderzenia prostopadłego pojazdów. W zderzeniu wykorzystano samochody tej samej marki i modelu. Samochód A poruszał się z prędkością 53 km/h i uderzył w tylne lewe koło samochodu B poruszającego się z prędkością dwukrotnie mniejszą. W wyniku zderzenia istotnej zmianie uległy kierunki i prędkości ruchu samochodów. Samochody utraciły stateczność kierunkową i zaczęły się poruszać ruchem złożonym w pełnym poślizgu. W konsekwencji, niektóre koła samochodów zaczęły znaczyć ślady tarcia na nawierzchni jezdni. Opisano te ślady oraz ich rozmieszczenie. Scharakteryzowano również inne ślady powstałe na drodze wskutek zderzenia. Przeprowadzona analiza może być przydatna dla osób zajmujących się opisem miejsc wypadków lub rekonstrukcją wypadków drogowych. Analysis of formation mechanism of marks on a roadway occurring as a result of perpendicular crash of cars in motion Abstract The paper presents an analysis of formation mechanism of marks on a roadway occurring as a result of front and side crash of two passenger cars in motion. The analysis has been carried out on the ground of results of a research work conducted in the Automotive Industry Institute consisting in physical simulation of perpendicular crash of cars. Cars of the same make and model were used in the crash. An A car was moving with the speed of 53 km/h and impacted against the left rear wheel of a B car moving with two times lower speed. As a result of the crash, directions and speeds of movement of the cars were essentially changed. The cars lost their directional stability and started moving with a complex motion in a full skid. Consequently, some wheels of the cars started making friction marks on the roadway. These marks and their location are described. Other marks that occurred on the roadway as a result of the crash are characterized as well. The analysis may be useful for persons who prepare descriptions of accident places or reconstructions of traffic accidents. BIBLIOGRAFIA 1. Gidlewski M.: Badania zderzeń bocznych samochodów osobowych w ruchu - ślady powstające na skutek zderzenia, istotne dla jego rekonstrukcji. Zeszyty Naukowe Instytutu Pojazdów Politechniki Warszawskiej 4/ Gidlewski M., Jemioł L., Prochowski L., Zielonka K.: Badanie procesów zachodzących podczas zderzenia samochodów. Paragraf na drodze. Numer specjalny Gidlewski M., Jemioł L.: Badanie zderzeń bocznych samochodów. Prędkości samochodów po zderzeniu. AUTOMOTIVE SAFETY IX INTERNATIONAL SCIENCE-TECHNIKAL CONFERENCE. Słowacja Gidlewski M., Jemioł L.: Zmiany parametrów ruchu samochodów w czasie zderzenia bocznego. Praca zbiorowa pod redakcją W. Mitiańca. Badania Pojazdów. Kraków Gidlewski M.: Analiza przebiegu i skutków czołowo-bocznego zderzenia samochodów. Referat zamawiany. Development of Automotive Engineering and Safety AES PROGRESS. Warszawa Prochowski L, Unarski J, Wach W, Wicher J: Podstawy rekonstrukcji wypadków drogowych, WKŁ, Warszawa 2008r.. Opisane w artykule badania i ich wyniki zostały wykonane w ramach projektu badawczego własnego nr N N
WPŁYW USYTUOWANIA POJAZDÓW W CHWILI ZDERZENIA CZOŁOWO-BOCZNEGO NA ICH RUCH POZDERZENIOWY
 Filip DĄBROWSKI, Mirosław GIDLEWSKI WPŁYW USYTUOWANIA POJAZDÓW W CHWILI ZDERZENIA CZOŁOWO-BOCZNEGO NA ICH RUCH POZDERZENIOWY W artykule przedstawiono wyniki badań eksperymentalnych uzyskanych w czasie
Filip DĄBROWSKI, Mirosław GIDLEWSKI WPŁYW USYTUOWANIA POJAZDÓW W CHWILI ZDERZENIA CZOŁOWO-BOCZNEGO NA ICH RUCH POZDERZENIOWY W artykule przedstawiono wyniki badań eksperymentalnych uzyskanych w czasie
BADANIA SYMULACYJNE PROCESU HAMOWANIA SAMOCHODU OSOBOWEGO W PROGRAMIE PC-CRASH
 BADANIA SYMULACYJNE PROCESU HAMOWANIA SAMOCHODU OSOBOWEGO W PROGRAMIE PC-CRASH Dr inż. Artur JAWORSKI, Dr inż. Hubert KUSZEWSKI, Dr inż. Adam USTRZYCKI W artykule przedstawiono wyniki analizy symulacyjnej
BADANIA SYMULACYJNE PROCESU HAMOWANIA SAMOCHODU OSOBOWEGO W PROGRAMIE PC-CRASH Dr inż. Artur JAWORSKI, Dr inż. Hubert KUSZEWSKI, Dr inż. Adam USTRZYCKI W artykule przedstawiono wyniki analizy symulacyjnej
Metodyka rekonstrukcji wypadków drogowych (laboratorium ćw. nr 1)
") Metodyka rekonstrukcji wypadków drogowych (laboratorium ćw. nr 1) Zad.1 Kierowca, samochodu osobowego o masie całkowitej m=1400 kg, na skutek zauważonej przeszkody rozpoczął intensywne hamowanie pojazdu
Metodyka rekonstrukcji wypadków drogowych (laboratorium ćw. nr 1) Zad.1 Kierowca, samochodu osobowego o masie całkowitej m=1400 kg, na skutek zauważonej przeszkody rozpoczął intensywne hamowanie pojazdu
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, Spis treści
 Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
Mechanika ruchu / Leon Prochowski. wyd. 3 uaktual. Warszawa, 2016 Spis treści Wykaz ważniejszych oznaczeń 11 Od autora 13 Wstęp 15 Rozdział 1. Wprowadzenie 17 1.1. Pojęcia ogólne. Klasyfikacja pojazdów
samochodu. Do wyznaczenia drogi zatrzymania i czasu zatrzymania wykorzystać idealizowany wykres hamowania samochodu.
 Metodyka rekonstrukcji wypadków drogowych laboratorium (ćw. nr 1) Zad.1 Samochód osobowy o masie całkowitej 1600 kg wjeżdża na wzniesienie na biegu IV ruchem przyspieszonym z przyspieszeniem 0.8 m/s 2.
Metodyka rekonstrukcji wypadków drogowych laboratorium (ćw. nr 1) Zad.1 Samochód osobowy o masie całkowitej 1600 kg wjeżdża na wzniesienie na biegu IV ruchem przyspieszonym z przyspieszeniem 0.8 m/s 2.
ZESZYTY NAUKOWE INSTYTUTU POJAZDÓW 4(90)/2012
/2012") ZESZYTY NAUKOWE INSTYTUTU POJAZDÓW 4(90)/2012 Mirosław Gidlewski 1 BADANIA ZDERZEŃ BOCZNYCH SAMOCHODÓW OSOBOWYCH W RUCHU- ŚLADY POWSTAJĄCE NA SKUTEK ZDERZENIA, ISTOTNE DLA JEGO REKONSTRUKCJI 1. Wstęp W
ZESZYTY NAUKOWE INSTYTUTU POJAZDÓW 4(90)/2012 Mirosław Gidlewski 1 BADANIA ZDERZEŃ BOCZNYCH SAMOCHODÓW OSOBOWYCH W RUCHU- ŚLADY POWSTAJĄCE NA SKUTEK ZDERZENIA, ISTOTNE DLA JEGO REKONSTRUKCJI 1. Wstęp W
Układ kierowniczy. Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek:
 1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO
 13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO 13.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP
13. WYZNACZANIE CHARAKTERYSTYK ORAZ PRZEŁOŻENIA UKŁADU KIEROWNICZEGO 13.0. Uwagi dotyczące bezpieczeństwa podczas wykonywania ćwiczenia 1. Studenci są zobowiązani do przestrzegania ogólnych przepisów BHP
WYZNACZANIE NIEPEWNOŚCI OBLICZEŃ W PRZYPADKU MODELI NIELINIOWO ZALEŻNYCH OD PARAMETRÓW
 WYZNACZANIE NIEPEWNOŚCI OBLICZEŃ W PRZYPADKU MODELI NIELINIOWO ZALEŻNYCH OD PARAMETRÓW TOMASZ PUSTY 1, JERZY WICHER 2 Automotive Industry Institute (PIMOT) Streszczenie W artykule podjęto problem określenia
WYZNACZANIE NIEPEWNOŚCI OBLICZEŃ W PRZYPADKU MODELI NIELINIOWO ZALEŻNYCH OD PARAMETRÓW TOMASZ PUSTY 1, JERZY WICHER 2 Automotive Industry Institute (PIMOT) Streszczenie W artykule podjęto problem określenia
Kąty Ustawienia Kół. WERTHER International POLSKA Sp. z o.o. dr inż. Marek Jankowski 2007-01-19
 WERTHER International POLSKA Sp. z o.o. dr inż. Marek Jankowski 2007-01-19 Kąty Ustawienia Kół Technologie stosowane w pomiarach zmieniają się, powstają coraz to nowe urządzenia ułatwiające zarówno regulowanie
WERTHER International POLSKA Sp. z o.o. dr inż. Marek Jankowski 2007-01-19 Kąty Ustawienia Kół Technologie stosowane w pomiarach zmieniają się, powstają coraz to nowe urządzenia ułatwiające zarówno regulowanie
PORÓWNANIE WYNIKÓW BADAŃ DROGOWYCH Z ICH SYMULACJĄ PROGRAMEM V-SIM NA PRZYKŁADZIE EKSTREMALNEGO HAMOWANIA SAMOCHODU WYPOSAŻONEGO W UKŁAD ABS
 Robert Janczur PORÓWNANIE WYNIKÓW BADAŃ DROGOWYCH Z ICH SYMULACJĄ PROGRAMEM V-SIM NA PRZYKŁADZIE EKSTREMALNEGO HAMOWANIA SAMOCHODU WYPOSAŻONEGO W UKŁAD ABS Streszczenie W artykule przedstawiono wyniki
Robert Janczur PORÓWNANIE WYNIKÓW BADAŃ DROGOWYCH Z ICH SYMULACJĄ PROGRAMEM V-SIM NA PRZYKŁADZIE EKSTREMALNEGO HAMOWANIA SAMOCHODU WYPOSAŻONEGO W UKŁAD ABS Streszczenie W artykule przedstawiono wyniki
Weryfikacja metod obliczeniowych stosowanych do wyznaczania energii potrzebnej do deformacji pojazdów podczas zderzeń bocznych
 GIDLEWSKI Mirosław 1 JEMIOŁ Leszek 2 POSUNIAK Paweł 3 Weryfikacja metod obliczeniowych stosowanych do wyznaczania energii potrzebnej do deformacji pojazdów podczas zderzeń bocznych WSTĘP Zderzenia boczne
GIDLEWSKI Mirosław 1 JEMIOŁ Leszek 2 POSUNIAK Paweł 3 Weryfikacja metod obliczeniowych stosowanych do wyznaczania energii potrzebnej do deformacji pojazdów podczas zderzeń bocznych WSTĘP Zderzenia boczne
Wykorzystanie zapisów video w rekonstrukcji zdarzeń drogowych
 Wykorzystanie zapisów video w rekonstrukcji zdarzeń drogowych Małgorzata Szyca, Maciej Szyca Streszczenie W artykule przedstawiono możliwości wykorzystania zapisów z kamer video w rekonstrukcji wypadków
Wykorzystanie zapisów video w rekonstrukcji zdarzeń drogowych Małgorzata Szyca, Maciej Szyca Streszczenie W artykule przedstawiono możliwości wykorzystania zapisów z kamer video w rekonstrukcji wypadków
Badania zderzeniowe infrastruktury drogowej Porównywalność wyników badań
 Badania zderzeniowe infrastruktury drogowej Porównywalność wyników badań Prowadzący: Paweł Posuniak Warszawa, 24-26.04.2018 r. Spis treści 1. Badania bezpieczeństwa infrastruktury drogowej 2. Wymagania
Badania zderzeniowe infrastruktury drogowej Porównywalność wyników badań Prowadzący: Paweł Posuniak Warszawa, 24-26.04.2018 r. Spis treści 1. Badania bezpieczeństwa infrastruktury drogowej 2. Wymagania
SYSTEMY SYSTEM KONTR OLI TRAKCJI OLI ukła uk dy dy be zpiec zeńs zpiec zeńs a tw czyn czyn
 SYSTEMY KONTROLI TRAKCJI układy bezpieczeństwa czynnego Gdańsk 2009 Układy hamulcowe w samochodach osobowych 1. Roboczy (zasadniczy) układ hamulcowy cztery koła, dwuobwodowy (pięć typów: II, X, HI, LL,
SYSTEMY KONTROLI TRAKCJI układy bezpieczeństwa czynnego Gdańsk 2009 Układy hamulcowe w samochodach osobowych 1. Roboczy (zasadniczy) układ hamulcowy cztery koła, dwuobwodowy (pięć typów: II, X, HI, LL,
Wykorzystanie przyczepności podczas hamowania pojazdu
 dr inŝ. Krzysztof Parczewski dr inŝ. Henryk Wnęk Katedra Silników Spalinowych i Pojazdów Akademia Techniczno-Humanistyczna Ul. Willowa 2, 43-300 Bielsko-Biała, Polska e-mail: kparczewski@ath.bielsko.pl,
dr inŝ. Krzysztof Parczewski dr inŝ. Henryk Wnęk Katedra Silników Spalinowych i Pojazdów Akademia Techniczno-Humanistyczna Ul. Willowa 2, 43-300 Bielsko-Biała, Polska e-mail: kparczewski@ath.bielsko.pl,
Teoria ruchu pojazdów samochodowych
 Opis przedmiotu: Teoria ruchu pojazdów samochodowych Kod przedmiotu Nazwa przedmiotu TR.SIP404 Teoria ruchu pojazdów samochodowych Wersja przedmiotu 2013/14 A. Usytuowanie przedmiotu w systemie studiów
Opis przedmiotu: Teoria ruchu pojazdów samochodowych Kod przedmiotu Nazwa przedmiotu TR.SIP404 Teoria ruchu pojazdów samochodowych Wersja przedmiotu 2013/14 A. Usytuowanie przedmiotu w systemie studiów
Politechnika Śląska. Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki. Praca dyplomowa inżynierska. Wydział Mechaniczny Technologiczny
 Politechnika Śląska Wydział Mechaniczny Technologiczny Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki Praca dyplomowa inżynierska Temat pracy Symulacja komputerowa działania hamulca tarczowego
Politechnika Śląska Wydział Mechaniczny Technologiczny Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki Praca dyplomowa inżynierska Temat pracy Symulacja komputerowa działania hamulca tarczowego
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc.
 Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc. ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przypuśćmy, że wszyscy ludzie na świecie zgromadzili się w jednym miejscu na Ziemi i na daną komendę jednocześnie
Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc. ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przypuśćmy, że wszyscy ludzie na świecie zgromadzili się w jednym miejscu na Ziemi i na daną komendę jednocześnie
Test powtórzeniowy nr 1
 Test powtórzeniowy nr 1 Grupa B... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
Test powtórzeniowy nr 1 Grupa B... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
Powtórzenie wiadomości z klasy I. Temat: Ruchy prostoliniowe. Obliczenia
 Powtórzenie wiadomości z klasy I Temat: Ruchy prostoliniowe. Obliczenia Ruch jest względny 1.Ruch i spoczynek są pojęciami względnymi. Można jednocześnie być w ruchu względem jednego ciała i w spoczynku
Powtórzenie wiadomości z klasy I Temat: Ruchy prostoliniowe. Obliczenia Ruch jest względny 1.Ruch i spoczynek są pojęciami względnymi. Można jednocześnie być w ruchu względem jednego ciała i w spoczynku
Siły i ruchy. Definicje. Nadwozie podatne skrętnie PGRT
 Definicje Definicje Prawidłowe przymocowanie zabudowy jest bardzo ważne, gdyż nieprawidłowe przymocowanie może spowodować uszkodzenie zabudowy, elementów mocujących i ramy podwozia. Nadwozie podatne skrętnie
Definicje Definicje Prawidłowe przymocowanie zabudowy jest bardzo ważne, gdyż nieprawidłowe przymocowanie może spowodować uszkodzenie zabudowy, elementów mocujących i ramy podwozia. Nadwozie podatne skrętnie
OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA
 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2008 Seria: TRANSPORT z. 64 Nr kol. 1803 Rafał SROKA OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA Streszczenie. W
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2008 Seria: TRANSPORT z. 64 Nr kol. 1803 Rafał SROKA OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA Streszczenie. W
SPIS TREŚCI WPROWADZENIE... 9
 SPIS TREŚCI WPROWADZENIE... 9 ZASADY BHP I REGULAMIN LABORATORIUM POJAZDÓW... 10 Bezpieczne warunki pracy zapewni przestrzeganie podstawowych zasad bhp i przepisów porządkowych........... 10 Regulamin
SPIS TREŚCI WPROWADZENIE... 9 ZASADY BHP I REGULAMIN LABORATORIUM POJAZDÓW... 10 Bezpieczne warunki pracy zapewni przestrzeganie podstawowych zasad bhp i przepisów porządkowych........... 10 Regulamin
MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW
 MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW ADAM GOŁASZEWSKI 1, TOMASZ SZYDŁOWSKI 2 Politechnika Łódzka Streszczenie Badania dynamiki ruchu pojazdów wpływają w istotny sposób na rozwój ogólnie rozumianej
MOBILNE STANOWISKO DO BADAŃ DYNAMIKI POJAZDÓW ADAM GOŁASZEWSKI 1, TOMASZ SZYDŁOWSKI 2 Politechnika Łódzka Streszczenie Badania dynamiki ruchu pojazdów wpływają w istotny sposób na rozwój ogólnie rozumianej
Wpływ zanieczyszczenia torowiska na drogę hamowania tramwaju
 DYCHTO Rafał 1 PIETRUSZEWSKI Robert 2 Wpływ zanieczyszczenia torowiska na drogę hamowania tramwaju WSTĘP W Katedrze Pojazdów i Podstaw Budowy Maszyn Politechniki Łódzkiej prowadzone są badania, których
DYCHTO Rafał 1 PIETRUSZEWSKI Robert 2 Wpływ zanieczyszczenia torowiska na drogę hamowania tramwaju WSTĘP W Katedrze Pojazdów i Podstaw Budowy Maszyn Politechniki Łódzkiej prowadzone są badania, których
MODELOWANIE WPŁYWU NIEZALEŻNEGO STEROWANIA KÓŁ LEWYCH I PRAWYCH NA ZACHOWANIE DYNAMICZNE POJAZDU
 Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2016 (111) 73 Karol Tatar, Piotr Chudzik Politechnika Łódzka, Łódź MODELOWANIE WPŁYWU NIEZALEŻNEGO STEROWANIA KÓŁ LEWYCH I PRAWYCH NA ZACHOWANIE DYNAMICZNE
Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2016 (111) 73 Karol Tatar, Piotr Chudzik Politechnika Łódzka, Łódź MODELOWANIE WPŁYWU NIEZALEŻNEGO STEROWANIA KÓŁ LEWYCH I PRAWYCH NA ZACHOWANIE DYNAMICZNE
Logistyka - nauka. Analiza zdarzenia drogowego w aspekcie zachowania zasad bezpieczeństwa w ruchu drogowym
 dr inż. Piotr Aleksandrowicz, dr inż. Bogdan Landowski Uniwersytet Technologiczno-Przyrodniczy w Bydgoszczy Analiza zdarzenia drogowego w aspekcie zachowania zasad bezpieczeństwa w ruchu drogowym Wstęp
dr inż. Piotr Aleksandrowicz, dr inż. Bogdan Landowski Uniwersytet Technologiczno-Przyrodniczy w Bydgoszczy Analiza zdarzenia drogowego w aspekcie zachowania zasad bezpieczeństwa w ruchu drogowym Wstęp
LABORATORIUM MECHANIKI PŁYNÓW. Ćwiczenie N 2 RÓWNOWAGA WZGLĘDNA W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ
 LABORATORIUM MECHANIKI PŁYNÓW Ćwiczenie N RÓWNOWAGA WZGLĘDNA W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ . Cel ćwiczenia Pomiar współrzędnych powierzchni swobodnej w naczyniu cylindrycznym wirującym wokół
LABORATORIUM MECHANIKI PŁYNÓW Ćwiczenie N RÓWNOWAGA WZGLĘDNA W NACZYNIU WIRUJĄCYM WOKÓŁ OSI PIONOWEJ . Cel ćwiczenia Pomiar współrzędnych powierzchni swobodnej w naczyniu cylindrycznym wirującym wokół
Ruch prostoliniowy. zmienny. dr inż. Romuald Kędzierski
 Ruch prostoliniowy zmienny dr inż. Romuald Kędzierski Przypomnienie Szybkość średnia Wielkość skalarna definiowana, jako iloraz przebytej drogi i czasu, w którym ta droga została przebyta. Uwaga: Szybkość
Ruch prostoliniowy zmienny dr inż. Romuald Kędzierski Przypomnienie Szybkość średnia Wielkość skalarna definiowana, jako iloraz przebytej drogi i czasu, w którym ta droga została przebyta. Uwaga: Szybkość
Cysterny. Informacje ogólne na temat samochodów cystern. Konstrukcja. Nadwozia typu cysterna uważane są za bardzo sztywne skrętnie.
 Informacje ogólne na temat samochodów cystern Informacje ogólne na temat samochodów cystern Nadwozia typu cysterna uważane są za bardzo sztywne skrętnie. Konstrukcja Rozstaw osi powinien być możliwie jak
Informacje ogólne na temat samochodów cystern Informacje ogólne na temat samochodów cystern Nadwozia typu cysterna uważane są za bardzo sztywne skrętnie. Konstrukcja Rozstaw osi powinien być możliwie jak
Bryła sztywna Zadanie domowe
 Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA
 Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia.
 Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Ćwiczenie: "Kinematyka"
 Ćwiczenie: "Kinematyka" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: 1. Ruch punktu
Ćwiczenie: "Kinematyka" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: 1. Ruch punktu
WYZNACZENIE WSPÓŁCZYNNIKA OPORU TOCZENIA I WSPÓŁCZYNNIKA OPORU POWIETRZA
 Cel ćwiczenia WYZNACZENIE WSPÓŁCZYNNIKA OPORU TOCZENIA I WSPÓŁCZYNNIKA OPORU POWIETRZA Celem cwiczenia jest wyznaczenie współczynników oporu powietrza c x i oporu toczenia f samochodu metodą wybiegu. Wprowadzenie
Cel ćwiczenia WYZNACZENIE WSPÓŁCZYNNIKA OPORU TOCZENIA I WSPÓŁCZYNNIKA OPORU POWIETRZA Celem cwiczenia jest wyznaczenie współczynników oporu powietrza c x i oporu toczenia f samochodu metodą wybiegu. Wprowadzenie
STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ
 Postępy Nauki i Techniki nr 12, 2012 Jakub Lisiecki *, Paweł Rosa *, Szymon Lisiecki * STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ Streszczenie.
Postępy Nauki i Techniki nr 12, 2012 Jakub Lisiecki *, Paweł Rosa *, Szymon Lisiecki * STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ Streszczenie.
Przechyły poprzeczne pojazdów wyniki badań i symulacji komputerowych Vehicles roll rotation results of research and computer simulation
 Robert Janczur Politechnika Krakowska, Instytut Pojazdów Samochodowych i Silników Spalinowych Piotr Świder Instytut Ekspertyz Sądowych, Kraków Przechyły poprzeczne pojazdów wyniki badań i symulacji komputerowych
Robert Janczur Politechnika Krakowska, Instytut Pojazdów Samochodowych i Silników Spalinowych Piotr Świder Instytut Ekspertyz Sądowych, Kraków Przechyły poprzeczne pojazdów wyniki badań i symulacji komputerowych
USZKODZENIE POJAZDU POPRZEZ NAJECHANIE NA STAŁĄ PRZESZKODĘ REKONSTRUKCJA WYPADKU SAMOCHODOWEGO
 Łukasz SIENKIEWICZ, Jarosław CHODÓR USZKODZENIE POJAZDU POPRZEZ NAJECHANIE NA STAŁĄ PRZESZKODĘ REKONSTRUKCJA WYPADKU SAMOCHODOWEGO Streszczenie W pracy przeprowadzono symulację przebiegu zdarzenia, wg
Łukasz SIENKIEWICZ, Jarosław CHODÓR USZKODZENIE POJAZDU POPRZEZ NAJECHANIE NA STAŁĄ PRZESZKODĘ REKONSTRUKCJA WYPADKU SAMOCHODOWEGO Streszczenie W pracy przeprowadzono symulację przebiegu zdarzenia, wg
Wektory, układ współrzędnych
 Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej
 Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Cysterny. Informacje ogólne na temat samochodów cystern. Konstrukcja PGRT. Nadwozia typu cysterna uważane są za bardzo sztywne skrętnie.
 Informacje ogólne na temat samochodów cystern Informacje ogólne na temat samochodów cystern Nadwozia typu cysterna uważane są za bardzo sztywne skrętnie. Konstrukcja Rozstaw osi powinien być możliwie jak
Informacje ogólne na temat samochodów cystern Informacje ogólne na temat samochodów cystern Nadwozia typu cysterna uważane są za bardzo sztywne skrętnie. Konstrukcja Rozstaw osi powinien być możliwie jak
Test powtórzeniowy nr 1
 Test powtórzeniowy nr 1 Grupa C... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
Test powtórzeniowy nr 1 Grupa C... imię i nazwisko ucznia...... data klasa W zadaniach 1. 19. wstaw krzyżyk w kwadracik obok wybranej odpowiedzi. Informacja do zadań 1. 5. Wykres przedstawia zależność
Transport I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny) stacjonarne (stacjonarne / niestacjonarne)
 ogólnoakademicki (ogólno akademicki / praktyczny) stacjonarne (stacjonarne / niestacjonarne)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Spis treści. Wykaz ważniejszych oznaczeń 11. Przedmowa 14
 Spis treści Wykaz ważniejszych oznaczeń 11 Przedmowa 14 Rozdział 1. Ogólna charakterystyka wypadków drogowych 17 1.1. Pojęcia i określenia 17 1.2. Klasyfikacja zderzeń 18 1.3. Statystyka wypadków drogowych
Spis treści Wykaz ważniejszych oznaczeń 11 Przedmowa 14 Rozdział 1. Ogólna charakterystyka wypadków drogowych 17 1.1. Pojęcia i określenia 17 1.2. Klasyfikacja zderzeń 18 1.3. Statystyka wypadków drogowych
ZŁOśONA REKONSTRUKCJA WYPADKU Z UDZIAŁEM KILKU POJAZDÓW AN INTRICATE RECONSTRUCTION OF ROAD ACCIDENT AT PARTICIPATION OF SEVERAL VEHICLES
 Piotr FUNDOWICZ 1 Rafał PODSIADŁO 2 Wypadek, symulacja, PC Crash ZŁOśONA REKONSTRUKCJA WYPADKU Z UDZIAŁEM KILKU POJAZDÓW W referacie przedstawiono rekonstrukcję wypadku drogowego, w którym brało udział
Piotr FUNDOWICZ 1 Rafał PODSIADŁO 2 Wypadek, symulacja, PC Crash ZŁOśONA REKONSTRUKCJA WYPADKU Z UDZIAŁEM KILKU POJAZDÓW W referacie przedstawiono rekonstrukcję wypadku drogowego, w którym brało udział
Weryfikacja eksperymentalna modelu Kudlicha-Slibara do wyznaczania prędkości samochodów po zderzeniu prostopadłym
 GDLEWSK Mirosław JEMOŁ Leszek Weryfikacja eksperymentalna modelu Kudlicha-Slibara do wyznaczania prędkości samochodów po zderzeniu prostopadłym WSTĘP Zderzenia samochodów zmieniają w sposób zasadniczy
GDLEWSK Mirosław JEMOŁ Leszek Weryfikacja eksperymentalna modelu Kudlicha-Slibara do wyznaczania prędkości samochodów po zderzeniu prostopadłym WSTĘP Zderzenia samochodów zmieniają w sposób zasadniczy
Ćwiczenie nr 6 Temat: BADANIE ŚWIATEŁ DO JAZDY DZIENNEJ
 60-965 Poznań Grupa: Elektrotechnika, sem 3., Podstawy Techniki Świetlnej Laboratorium wersja z dn. 03.11.2015 Ćwiczenie nr 6 Temat: BADANIE ŚWIATEŁ DO JAZDY DZIENNEJ Opracowanie wykonano na podstawie
60-965 Poznań Grupa: Elektrotechnika, sem 3., Podstawy Techniki Świetlnej Laboratorium wersja z dn. 03.11.2015 Ćwiczenie nr 6 Temat: BADANIE ŚWIATEŁ DO JAZDY DZIENNEJ Opracowanie wykonano na podstawie
Warszawa, dnia 7 września 2012 r. Poz. 997 ROZPORZĄDZENIE MINISTRA TRANSPORTU, BUDOWNICTWA I GOSPODARKI MORSKIEJ 1) z dnia 3 sierpnia 2012 r.
 z dnia 3 sierpnia 2012 r.") DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ Warszawa, dnia 7 września 12 r. Poz. 997 ROZPORZĄDZENIE MINISTRA TRANSPORTU, BUDOWNICTWA I GOSPODARKI MORSKIEJ 1) z dnia 3 sierpnia 12 r. zmieniające rozporządzenie
DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ Warszawa, dnia 7 września 12 r. Poz. 997 ROZPORZĄDZENIE MINISTRA TRANSPORTU, BUDOWNICTWA I GOSPODARKI MORSKIEJ 1) z dnia 3 sierpnia 12 r. zmieniające rozporządzenie
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
KARTY POMIAROWE DO BADAŃ DROGOWYCH
 Katedra Pojazdów i Sprzętu Mechanicznego Laboratorium KARTY POMIAROWE DO BADAŃ DROGOWYCH Zawartość 5 kart pomiarowych Kielce 00 Opracował : dr inż. Rafał Jurecki str. Strona / Silnik Charakterystyka obiektu
Katedra Pojazdów i Sprzętu Mechanicznego Laboratorium KARTY POMIAROWE DO BADAŃ DROGOWYCH Zawartość 5 kart pomiarowych Kielce 00 Opracował : dr inż. Rafał Jurecki str. Strona / Silnik Charakterystyka obiektu
Ruch jednostajnie zmienny prostoliniowy
 Ruch jednostajnie zmienny prostoliniowy Przyspieszenie w ruchu jednostajnie zmiennym prostoliniowym Jest to taki ruch, w którym wektor przyspieszenia jest stały, co do wartości (niezerowej), kierunku i
Ruch jednostajnie zmienny prostoliniowy Przyspieszenie w ruchu jednostajnie zmiennym prostoliniowym Jest to taki ruch, w którym wektor przyspieszenia jest stały, co do wartości (niezerowej), kierunku i
'MAPOSTAW' Praca zespołowa: Sylwester Adamczyk Krzysztof Radzikowski. Promotor: prof. dr hab. inż. Bogdan Branowski
 Mały pojazd miejski o napędzie spalinowym dla osób w starszym wieku i samotnych 'MAPOSTAW' Praca zespołowa: Sylwester Adamczyk Krzysztof Radzikowski Promotor: prof. dr hab. inż. Bogdan Branowski Cel pracy
Mały pojazd miejski o napędzie spalinowym dla osób w starszym wieku i samotnych 'MAPOSTAW' Praca zespołowa: Sylwester Adamczyk Krzysztof Radzikowski Promotor: prof. dr hab. inż. Bogdan Branowski Cel pracy
BADANIA WPŁYWU PRACY PRZY KOMPUTERZE NA ZDOLNOŚĆ PROWADZENIA POJAZDÓW CIĘŻAROWYCH
 BADANIA WPŁYWU PRACY PRZY KOMPUTERZE NA ZDOLNOŚĆ PROWADZENIA POJAZDÓW CIĘŻAROWYCH Krzysztof BALAWENDER, Mirosław JAKUBOWSKI, Artur KRZEMIŃSKI, Paweł WOJEWODA W artykule zostały przedstawione badania wpływu
BADANIA WPŁYWU PRACY PRZY KOMPUTERZE NA ZDOLNOŚĆ PROWADZENIA POJAZDÓW CIĘŻAROWYCH Krzysztof BALAWENDER, Mirosław JAKUBOWSKI, Artur KRZEMIŃSKI, Paweł WOJEWODA W artykule zostały przedstawione badania wpływu
Ruch. Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował.
 Kinematyka Ruch Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował. Ruch rozumiany jest jako zmiana położenia jednych ciał względem innych, które nazywamy
Kinematyka Ruch Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przyczyny, które ruch ciał spowodował. Ruch rozumiany jest jako zmiana położenia jednych ciał względem innych, które nazywamy
SPRAWDZIAN NR Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową.
 SPRAWDZIAN NR 1 IMIĘ I NAZWISKO: KLASA: GRUPA A 1. Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową. Zaznacz poprawne dokończenie zdania. Siłę powodującą ruch Merkurego wokół Słońca
SPRAWDZIAN NR 1 IMIĘ I NAZWISKO: KLASA: GRUPA A 1. Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową. Zaznacz poprawne dokończenie zdania. Siłę powodującą ruch Merkurego wokół Słońca
NIEPEWNOŚĆ W OKREŚLENIU PRĘDKOŚCI EES ZDERZENIA SAMOCHODÓW WYZNACZANEJ METODĄ EKSPERYMENTALNO-ANALITYCZNĄ
 NIEPEWNOŚĆ W OKREŚLENIU PRĘDKOŚCI EES ZDERZENIA SAMOCHODÓW WYZNACZANEJ METODĄ EKSPERYMENTALNO-ANALITYCZNĄ Karol SZTWIERTNIA 1, Marek GUZEK, Janusz JANUŁA 3 Streszczenie Przedmiotem artykułu jest niepewność
NIEPEWNOŚĆ W OKREŚLENIU PRĘDKOŚCI EES ZDERZENIA SAMOCHODÓW WYZNACZANEJ METODĄ EKSPERYMENTALNO-ANALITYCZNĄ Karol SZTWIERTNIA 1, Marek GUZEK, Janusz JANUŁA 3 Streszczenie Przedmiotem artykułu jest niepewność
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
PF11- Dynamika bryły sztywnej.
 Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Dwa w jednym teście. Badane parametry
 Dwa w jednym teście Rys. Jacek Kubiś, Wimad Schemat zawieszenia z zaznaczeniem wprowadzonych pojęć Urządzenia do kontroli zawieszeń metodą Boge badają ich działanie w przebiegach czasowych. Wyniki zależą
Dwa w jednym teście Rys. Jacek Kubiś, Wimad Schemat zawieszenia z zaznaczeniem wprowadzonych pojęć Urządzenia do kontroli zawieszeń metodą Boge badają ich działanie w przebiegach czasowych. Wyniki zależą
Zestaw zadań na I etap konkursu fizycznego. Zad. 1 Kamień spadał swobodnie z wysokości h=20m. Średnia prędkość kamienia wynosiła :
 Zestaw zadań na I etap konkursu fizycznego Zad. 1 Kamień spadał swobodnie z wysokości h=20m. Średnia prędkość kamienia wynosiła : A) 5m/s B) 10m/s C) 20m/s D) 40m/s. Zad.2 Samochód o masie 1 tony poruszał
Zestaw zadań na I etap konkursu fizycznego Zad. 1 Kamień spadał swobodnie z wysokości h=20m. Średnia prędkość kamienia wynosiła : A) 5m/s B) 10m/s C) 20m/s D) 40m/s. Zad.2 Samochód o masie 1 tony poruszał
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
SYMULACYJNA OCENA PORÓWNAWCZA ZWROTNOŚCI SAMOCHODU OSOBOWEGO W RUCHU DO PRZODU I DO TYŁU
 SYMULACYJNA OCENA PORÓWNAWCZA ZWROTNOŚCI SAMOCHODU OSOBOWEGO W RUCHU DO PRZODU I DO TYŁU JANUSZ KULMA 1, ZBIGNIEW LOZIA 2 Politechnika Warszawska Streszczenie Celem pracy jest porównanie zwrotności (zdolności
SYMULACYJNA OCENA PORÓWNAWCZA ZWROTNOŚCI SAMOCHODU OSOBOWEGO W RUCHU DO PRZODU I DO TYŁU JANUSZ KULMA 1, ZBIGNIEW LOZIA 2 Politechnika Warszawska Streszczenie Celem pracy jest porównanie zwrotności (zdolności
MANEWR PODWÓJNEJ ZMIANY PASA RUCHU PRÓBA OCENY PROGRAMÓW DO REKONSTRUKCJI WYPADKÓW DROGOWYCH
 z. 7-M/24 (ROK 11) ISSN 11-461 Piotr ŚWIDER, Witold GRZEGOŻEK MANEWR PODWÓJNEJ ZMIANY PASA RUCHU PRÓBA OCENY PROGRAMÓW DO REKONSTRUKCJI WYPADKÓW DROGOWYCH 1. WPROWADZENIE W praktyce opiniowania wypadków
z. 7-M/24 (ROK 11) ISSN 11-461 Piotr ŚWIDER, Witold GRZEGOŻEK MANEWR PODWÓJNEJ ZMIANY PASA RUCHU PRÓBA OCENY PROGRAMÓW DO REKONSTRUKCJI WYPADKÓW DROGOWYCH 1. WPROWADZENIE W praktyce opiniowania wypadków
Badania doświadczalne wielkości pola powierzchni kontaktu opony z nawierzchnią w funkcji ciśnienia i obciążenia
 WALUŚ Konrad J. 1 POLASIK Jakub 2 OLSZEWSKI Zbigniew 3 Badania doświadczalne wielkości pola powierzchni kontaktu opony z nawierzchnią w funkcji ciśnienia i obciążenia WSTĘP Parametry pojazdów samochodowych
WALUŚ Konrad J. 1 POLASIK Jakub 2 OLSZEWSKI Zbigniew 3 Badania doświadczalne wielkości pola powierzchni kontaktu opony z nawierzchnią w funkcji ciśnienia i obciążenia WSTĘP Parametry pojazdów samochodowych
Wyznaczenie prędkości pojazdu na podstawie długości śladów hamowania pozostawionych na drodze
 Podstawy analizy wypadów drogowych Instrucja do ćwiczenia 1 Wyznaczenie prędości pojazdu na podstawie długości śladów hamowania pozostawionych na drodze Spis treści 1. CEL ĆWICZENIA... 3. WPROWADZENIE...
Podstawy analizy wypadów drogowych Instrucja do ćwiczenia 1 Wyznaczenie prędości pojazdu na podstawie długości śladów hamowania pozostawionych na drodze Spis treści 1. CEL ĆWICZENIA... 3. WPROWADZENIE...
ZESZYTY NAUKOWE INSTYTUTU POJAZDÓW 4(100)/2014
/2014") ZESZYTY NAUKOWE INSTYTUTU POJAZDÓW 4(1)/214 Jerzy Grzesiak 1, Piotr Stryjek 2 Paweł Włodarczyk 3 WPŁYW ZMIANY ROZKŁADU CIŚNIENIA POMIĘDZY KOŁAMI PRZEDNIEJ I TYLNEJ OSI NA KIEROWALNOŚĆ POJAZDU, NA PRZYKŁADZIE
ZESZYTY NAUKOWE INSTYTUTU POJAZDÓW 4(1)/214 Jerzy Grzesiak 1, Piotr Stryjek 2 Paweł Włodarczyk 3 WPŁYW ZMIANY ROZKŁADU CIŚNIENIA POMIĘDZY KOŁAMI PRZEDNIEJ I TYLNEJ OSI NA KIEROWALNOŚĆ POJAZDU, NA PRZYKŁADZIE
MECHANIKA 2 KINEMATYKA. Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
PRZYRZĄD DO BADANIA RUCHU JEDNOSTAJNEGO l JEDNOSTANIE ZMIENNEGO V 5-143
 Przyrząd do badania ruchu jednostajnego i jednostajnie zmiennego V 5-43 PRZYRZĄD DO BADANIA RUCHU JEDNOSTAJNEGO l JEDNOSTANIE ZMIENNEGO V 5-43 Oprac. FzA, IF US, 2007 Rys. Przyrząd stanowi równia pochyła,
Przyrząd do badania ruchu jednostajnego i jednostajnie zmiennego V 5-43 PRZYRZĄD DO BADANIA RUCHU JEDNOSTAJNEGO l JEDNOSTANIE ZMIENNEGO V 5-43 Oprac. FzA, IF US, 2007 Rys. Przyrząd stanowi równia pochyła,
Państwowa Komisja Badania Wypadków Lotniczych Samolot Piper PA FT; SP-NBC; r., Weremień k/leska ALBUM ILUSTRACJI
 ALBUM ILUSTRACJI z wypadku samolotu Piper PA-32-301FT; SP-NBC 22 lipca 2007 r., Weremień k/leska ALBUM ILUSTRACJI Strona 1 z 12 1 Samolot Piper PA-32-301FT (późniejszy SP-NBC) sfotografowany w dniu 13
ALBUM ILUSTRACJI z wypadku samolotu Piper PA-32-301FT; SP-NBC 22 lipca 2007 r., Weremień k/leska ALBUM ILUSTRACJI Strona 1 z 12 1 Samolot Piper PA-32-301FT (późniejszy SP-NBC) sfotografowany w dniu 13
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
1999 NR 43 POZ. 430 Z PÓŹN. ZM.)
") ROZPORZĄDZENIE MINISTRA TRANSPORTU I GOSPODARKI MORSKIEJ Z DNIA 2 MARCA 1999 R. W SPRAWIE WARUNKÓW TECHNICZNYCH, JAKIM POWINNY ODPOWIADAĆ DROGI PUBLICZNE I ICH USYTUOWANIE (DZ. U. 1999 NR 43 POZ. 430 Z
ROZPORZĄDZENIE MINISTRA TRANSPORTU I GOSPODARKI MORSKIEJ Z DNIA 2 MARCA 1999 R. W SPRAWIE WARUNKÓW TECHNICZNYCH, JAKIM POWINNY ODPOWIADAĆ DROGI PUBLICZNE I ICH USYTUOWANIE (DZ. U. 1999 NR 43 POZ. 430 Z
Infrastruktura drogowa chroniąca pieszych
 Infrastruktura drogowa chroniąca pieszych Prowadzący: Paweł Posuniak Warszawa, 23.03.2018r. Spis treści 1. Wstęp 2. Definicje 3. Statystyki 4. Piesi jako niechronieni użytkownicy dróg 5. Infrastruktura
Infrastruktura drogowa chroniąca pieszych Prowadzący: Paweł Posuniak Warszawa, 23.03.2018r. Spis treści 1. Wstęp 2. Definicje 3. Statystyki 4. Piesi jako niechronieni użytkownicy dróg 5. Infrastruktura
Modelowanie wpływu niezależnego sterowania kół lewych i prawych na zachowanie dynamiczne pojazdu
 Modelowanie wpływu niezależnego sterowania kół lewych i prawych na zachowanie dynamiczne pojazdu Karol Tatar, Piotr Chudzik 1. Wstęp Jedną z nowych możliwości, jakie daje zastąpienie silnika spalinowego
Modelowanie wpływu niezależnego sterowania kół lewych i prawych na zachowanie dynamiczne pojazdu Karol Tatar, Piotr Chudzik 1. Wstęp Jedną z nowych możliwości, jakie daje zastąpienie silnika spalinowego
Rodzaje zadań w nauczaniu fizyki
 Jan Tomczak Rodzaje zadań w nauczaniu fizyki Typologia zadań pisemnych wg. prof. B. Niemierki obejmuje 2 rodzaje, 6 form oraz 15 typów zadań. Rodzaj: Forma: Typ: Otwarte Rozszerzonej odpowiedzi - czynności
Jan Tomczak Rodzaje zadań w nauczaniu fizyki Typologia zadań pisemnych wg. prof. B. Niemierki obejmuje 2 rodzaje, 6 form oraz 15 typów zadań. Rodzaj: Forma: Typ: Otwarte Rozszerzonej odpowiedzi - czynności
Zasady dynamiki Newtona
 Zasady dynamiki Newtona 1. Znajdź masę ciała (poruszającego się po prostej), które pod działaniem siły o wartości F = 30 N w czasie t= 5s zmienia swą szybkość z v 1 = 15 m/s na v 2 = 30 m/s. 2. Znajdź
Zasady dynamiki Newtona 1. Znajdź masę ciała (poruszającego się po prostej), które pod działaniem siły o wartości F = 30 N w czasie t= 5s zmienia swą szybkość z v 1 = 15 m/s na v 2 = 30 m/s. 2. Znajdź
Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej
 Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej Dynamika ruchu postępowego 1. Balon opada ze stałą prędkością. Jaką masę balastu należy wyrzucić, aby balon
Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej Dynamika ruchu postępowego 1. Balon opada ze stałą prędkością. Jaką masę balastu należy wyrzucić, aby balon
Strzegomska 42b, Wrocław Ocena stanu technicznego i określenie wartości rynkowej pojazdu
 OCENA TECHNICZNA nr: z dnia: Rzeczoznawca : mgr inż. Piotr Haller Zleceniodawca: Idea Leasing S.A. Adres: Strzegomska 42b, 53-611 Wrocław Zadanie: Ocena stanu technicznego i określenie wartości rynkowej
OCENA TECHNICZNA nr: z dnia: Rzeczoznawca : mgr inż. Piotr Haller Zleceniodawca: Idea Leasing S.A. Adres: Strzegomska 42b, 53-611 Wrocław Zadanie: Ocena stanu technicznego i określenie wartości rynkowej
KRYTERIA OCENY PARAMETRÓW KÓŁ POJAZDÓW POWYPADKOWYCH
 KRYTERIA OCENY PARAMETRÓW KÓŁ POJAZDÓW POWYPADKOWYCH CZYM GROZI NIEWŁAŚCIWE USTAWIENIE GEOMETRII KÓŁ? KRYTERIA OCENY PARAMETRÓW KÓŁ POJAZDÓW POWYPADKOWYCH Geometria kół ma bezpośredni wpływ na bezpieczeństwo,
KRYTERIA OCENY PARAMETRÓW KÓŁ POJAZDÓW POWYPADKOWYCH CZYM GROZI NIEWŁAŚCIWE USTAWIENIE GEOMETRII KÓŁ? KRYTERIA OCENY PARAMETRÓW KÓŁ POJAZDÓW POWYPADKOWYCH Geometria kół ma bezpośredni wpływ na bezpieczeństwo,
ZAKRES AKREDYTACJI LABORATORIUM BADAWCZEGO Nr AB 150
 ZAKRES AKREDYTACJI LABORATORIUM BADAWCZEGO Nr AB 150 wydany przez POLSKIE CENTRUM AKREDYTACJI 01-382 Warszawa, ul. Szczotkarska 42 Wydanie nr 9 Data wydania: 29 sierpnia 2013 r. Nazwa i adres AB 150 WOJSKOWY
ZAKRES AKREDYTACJI LABORATORIUM BADAWCZEGO Nr AB 150 wydany przez POLSKIE CENTRUM AKREDYTACJI 01-382 Warszawa, ul. Szczotkarska 42 Wydanie nr 9 Data wydania: 29 sierpnia 2013 r. Nazwa i adres AB 150 WOJSKOWY
SPRAWDZIAN Nr 1 (wersja A)
") SPRAWDZIAN Nr 1 (wersja A) 1. Parasol leżący na fotelu jadącego samochodu względem tego samochodu Ojest w ruchu spoczywa względem szosy, po której jedzie samochód x (m)n Qjest w ruchu spoczywa 4^> 2. Chłopiec
SPRAWDZIAN Nr 1 (wersja A) 1. Parasol leżący na fotelu jadącego samochodu względem tego samochodu Ojest w ruchu spoczywa względem szosy, po której jedzie samochód x (m)n Qjest w ruchu spoczywa 4^> 2. Chłopiec
Dynamika samochodu Vehicle dynamics
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
PProblematyka. wypadków drogowych. Wojciech Kotowski. z ciągnikiem rolniczym
 PProblematyka wypadków drogowych Wojciech Kotowski Zderzenie samochodu osobowego z ciągnikiem rolniczym Wypadek drogowy miał miejsce w porze letniej około godz. 15.00 na jezdni drogi z miejscowości N.
PProblematyka wypadków drogowych Wojciech Kotowski Zderzenie samochodu osobowego z ciągnikiem rolniczym Wypadek drogowy miał miejsce w porze letniej około godz. 15.00 na jezdni drogi z miejscowości N.
Betonomieszarki. Konstrukcja. Zabudowa betonomieszarki jest skrętnie podatna.
 Ogólne informacje na temat betonomieszarek Ogólne informacje na temat betonomieszarek Zabudowa betonomieszarki jest skrętnie podatna. Konstrukcja Betonomieszarki nie mają funkcji wywrotki, ale ponieważ
Ogólne informacje na temat betonomieszarek Ogólne informacje na temat betonomieszarek Zabudowa betonomieszarki jest skrętnie podatna. Konstrukcja Betonomieszarki nie mają funkcji wywrotki, ale ponieważ
Materiał powtórzeniowy dla klas pierwszych
 Materiał powtórzeniowy dla klas pierwszych 1. Paweł trzyma w ręku teczkę siłą 20N zwróconą do góry. Ciężar teczki ma wartośd: a) 0N b) 10N c) 20N d) 40N 2. Wypadkowa sił działających na teczkę trzymaną
Materiał powtórzeniowy dla klas pierwszych 1. Paweł trzyma w ręku teczkę siłą 20N zwróconą do góry. Ciężar teczki ma wartośd: a) 0N b) 10N c) 20N d) 40N 2. Wypadkowa sił działających na teczkę trzymaną
Zastosowanie programu symulacji zdarzeń drogowych do weryfikacji okoliczności zdarzeń podanych przez ich uczestników
 GOLA Marek 1 RÓŻYCKI Andrzej 2 Zastosowanie programu symulacji zdarzeń drogowych do weryfikacji okoliczności zdarzeń podanych przez ich uczestników WSTĘP W szeroko pojętym zakresie zagadnień logistyki
GOLA Marek 1 RÓŻYCKI Andrzej 2 Zastosowanie programu symulacji zdarzeń drogowych do weryfikacji okoliczności zdarzeń podanych przez ich uczestników WSTĘP W szeroko pojętym zakresie zagadnień logistyki
BADANIA PROCESU HAMOWANIA MOTOROWERU NA NAWIERZCHNI Z KOSTKI BRUKOWEJ
 Adam GOŁASZEWSKI, Tomasz SZYDŁOWSKI BADANIA PROCESU HAMOWANIA MOTOROWERU NA NAWIERZCHNI Z KOSTKI BRUKOWEJ W pracy zamieszczono wyniki badań procesu hamowania motoroweru na nawierzchni z kostki betonowej.
Adam GOŁASZEWSKI, Tomasz SZYDŁOWSKI BADANIA PROCESU HAMOWANIA MOTOROWERU NA NAWIERZCHNI Z KOSTKI BRUKOWEJ W pracy zamieszczono wyniki badań procesu hamowania motoroweru na nawierzchni z kostki betonowej.
MODELOWANIE HAMULCA TARCZOWEGO SAMOCHODU OSOBOWEGO Z WYKORZYSTANIEM ZINTEGROWANYCH SYSTEMÓW KOMPUTEROWYCH CAD/CAE
 Marta KORDOWSKA, Zbigniew BUDNIAK, Wojciech MUSIAŁ MODELOWANIE HAMULCA TARCZOWEGO SAMOCHODU OSOBOWEGO Z WYKORZYSTANIEM ZINTEGROWANYCH SYSTEMÓW KOMPUTEROWYCH CAD/CAE Streszczenie W artykule omówiona została
Marta KORDOWSKA, Zbigniew BUDNIAK, Wojciech MUSIAŁ MODELOWANIE HAMULCA TARCZOWEGO SAMOCHODU OSOBOWEGO Z WYKORZYSTANIEM ZINTEGROWANYCH SYSTEMÓW KOMPUTEROWYCH CAD/CAE Streszczenie W artykule omówiona została
ANALiZA WPŁYWU PARAMETRÓW SAMOLOTU NA POZiOM HAŁASU MiERZONEGO WEDŁUG PRZEPiSÓW FAR 36 APPENDiX G
 PRACE instytutu LOTNiCTWA 221, s. 115 120, Warszawa 2011 ANALiZA WPŁYWU PARAMETRÓW SAMOLOTU NA POZiOM HAŁASU MiERZONEGO WEDŁUG PRZEPiSÓW FAR 36 APPENDiX G i ROZDZiAŁU 10 ZAŁOżEń16 KONWENCJi icao PIotr
PRACE instytutu LOTNiCTWA 221, s. 115 120, Warszawa 2011 ANALiZA WPŁYWU PARAMETRÓW SAMOLOTU NA POZiOM HAŁASU MiERZONEGO WEDŁUG PRZEPiSÓW FAR 36 APPENDiX G i ROZDZiAŁU 10 ZAŁOżEń16 KONWENCJi icao PIotr
20. BADANIE SZTYWNOŚCI SKRĘTNEJ NADWOZIA. 20.1. Cel ćwiczenia. 20.2. Wprowadzenie
 20. BADANIE SZTYWNOŚCI SKRĘTNEJ NADWOZIA 20.1. Cel ćwiczenia Celem ćwiczenia jest wykonanie pomiaru sztywności skrętnej nadwozia samochodu osobowego. 20.2. Wprowadzenie Sztywność skrętna jest jednym z
20. BADANIE SZTYWNOŚCI SKRĘTNEJ NADWOZIA 20.1. Cel ćwiczenia Celem ćwiczenia jest wykonanie pomiaru sztywności skrętnej nadwozia samochodu osobowego. 20.2. Wprowadzenie Sztywność skrętna jest jednym z
Rzeczoznawca : mgr inż. Marek BĄK RS
 OCENA TECHNICZNA nr: z dnia: 2015/10/14 Rzeczoznawca : mgr inż. Marek BĄK RS 001232 Zleceniodawca: Idea Leasing SA Adres: Strzegomska 42b 53-611 Wrocław Zadanie: Ocena stanu technicznego i określenie wartości
OCENA TECHNICZNA nr: z dnia: 2015/10/14 Rzeczoznawca : mgr inż. Marek BĄK RS 001232 Zleceniodawca: Idea Leasing SA Adres: Strzegomska 42b 53-611 Wrocław Zadanie: Ocena stanu technicznego i określenie wartości
ROZPORZĄDZENIE MINISTRA INFRASTRUKTURY 1) z dnia 21 lutego 2011 r.
 z dnia 21 lutego 2011 r.") Dziennik Ustaw Nr 47 3102 Poz. 242 242 ROZPORZĄDZENIE MINISTRA INFRASTRUKTURY 1) z dnia 21 lutego 2011 r. zmieniające rozporządzenie w sprawie warunków technicznych pojazdów oraz zakresu ich niezbędnego
Dziennik Ustaw Nr 47 3102 Poz. 242 242 ROZPORZĄDZENIE MINISTRA INFRASTRUKTURY 1) z dnia 21 lutego 2011 r. zmieniające rozporządzenie w sprawie warunków technicznych pojazdów oraz zakresu ich niezbędnego
O 2 O 1. Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
 msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
Rysunek 1: Okno timeline wykorzystywane do tworzenia animacji.
 Ćwiczenie 5 - Tworzenie animacji Podczas tworzenia prostej animacji wykorzystywać będziemy okno Timeline domyślnie ustawione na dole okna Blendera (Rys. 1). Proces tworzenia animacji polega na stworzeniu
Ćwiczenie 5 - Tworzenie animacji Podczas tworzenia prostej animacji wykorzystywać będziemy okno Timeline domyślnie ustawione na dole okna Blendera (Rys. 1). Proces tworzenia animacji polega na stworzeniu
Rowery, motorowery, czterokołowce. Definicje, warunki dopuszczenia do ruchu drogowego
 Rowery, motorowery, czterokołowce Definicje, warunki dopuszczenia do ruchu drogowego Rower Rower: pojazd o szerokości nie przekraczającej 0,9 m poruszany siłą mięśni osoby jadącej tym pojazdem; rower może
Rowery, motorowery, czterokołowce Definicje, warunki dopuszczenia do ruchu drogowego Rower Rower: pojazd o szerokości nie przekraczającej 0,9 m poruszany siłą mięśni osoby jadącej tym pojazdem; rower może
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Instrukcja do ćwiczenia
 Uniwersytet Technologiczno-Humanistyczny im. Kazimierza Pułaskiego w Radomiu Wydział Mechaniczny Instytut Eksploatacji Pojazdów i Maszyn Zakład Pojazdów i Silników Spalinowych Studia II stopnia Kierunek
Uniwersytet Technologiczno-Humanistyczny im. Kazimierza Pułaskiego w Radomiu Wydział Mechaniczny Instytut Eksploatacji Pojazdów i Maszyn Zakład Pojazdów i Silników Spalinowych Studia II stopnia Kierunek
BADANIA PROCESU HAMOWANIA SAMOCHODÓW NA ŚLISKIEJ NAWIERZCHNI
 BADANIA PROCESU HAMOWANIA SAMOCHODÓW NA ŚLISKIEJ NAWIERZCHNI Artur JAWORSKI, Hubert KUSZEWSKI W artykule przedstawiono wybrane wyniki badań procesu hamowania samochodów w warunkach śliskiej nawierzchni.
BADANIA PROCESU HAMOWANIA SAMOCHODÓW NA ŚLISKIEJ NAWIERZCHNI Artur JAWORSKI, Hubert KUSZEWSKI W artykule przedstawiono wybrane wyniki badań procesu hamowania samochodów w warunkach śliskiej nawierzchni.
Badanie ruchu złożenia
 Badanie ruchu złożenia W wersji Standard programu SolidWorks mamy do dyspozycji dwie aplikacje: Podstawowy ruch symulacja ruchu z użyciem grawitacji, sprężyn, napędów oraz kontaktu między komponentami.
Badanie ruchu złożenia W wersji Standard programu SolidWorks mamy do dyspozycji dwie aplikacje: Podstawowy ruch symulacja ruchu z użyciem grawitacji, sprężyn, napędów oraz kontaktu między komponentami.