Robot ortotyczny jako system mechatroniczny
|
|
|
- Bernard Piekarski
- 6 lat temu
- Przeglądów:
Transkrypt



1 Danuta Jasińska-Choromańska, Jakub Wierciak Ksawery Szykiedans i inni Robot ortotyczny jako system mechatroniczny ECO-MOBILITY innovative systems, constructions and advanced material technologies
2 Osoby z ograniczeniami ruchu (Ditunno 1994) Niedowłady lub porażenia mięśni mogą powstawać z różnych przyczyn, które w ogólnym zarysie dotyczą bądź to uszkodzenia dróg nerwowych przewodzących sygnały ruchowe, bądź patologii mięśni, kości, ścięgien, więzadeł, które stanowią efektor całego układu.

")
3 3 Wózki inwalidzkie (OrtoService 2011) Elektryczny Ręczny
4 Współczesne podejście do problemu - roboty ortotyczne (Pons 2008) Wearable robots Egzoszkielety Roboty ortotyczne Roboty protetyczne
5 Przedmiot projektu (ECO-V 2009) Sprawna górna część ciała Urządzenie Mocowane do tułowia Bezwładne mięśnie kończyn dolnych Zdrowy układ kostny kończyn dolnych Programowo napędzane kończyny dolne Użytkownik Obciążenia przenoszone przez układ kostny

")
6 Przykładowe rozwiązania (Argo Medical Technologies Ltd., Berkeley 2011) ReWalk elegs
7 Koncepcja użytkowa systemu
8 Opis podsystemów (Wierciak 2010)
9 Koncepcja użytkowo - eksploatacyjna urządzenia (ECO-V 2009) System instalowany ręcznie Utrzymywanie równowagi przez użytkownika Odciążanie kończyny w fazie wymachu przez użytkownika Programowa realizacja funkcji chodu Źródło energii pomocniczej przenoszone przez użytkownika

10 Koncepcja użytkowa urządzenia (ECO-V 2009)
11 Struktura funkcjonalna
12 Ogólny model funkcji systemów mechatronicznych (Gawrysiak 1997)
13 Model funkcji systemów mechatronicznych - funkcja główna (Gawrysiak 1997)
14 Założenia użytkowe funkcja główna (ECO-V 2009) Chód po płaskiej powierzchni Pokonywanie schodów Siadanie Wstawanie Pokonywanie niewielkich przeszkód
15 Funkcja główna chód po płaskiej poziomej powierzchni (Whittle 1996)
16 Struktura mechaniczna układu ruchu człowieka (Szykiedans 2010) Miednica 3 stopnie swobody Staw biodrowy 3 stopnie swobody Staw kolanowy 3 stopnie swobody Staw skokowy Stopa 3 stopnie swobody 2 stopnie swobody
17 Chód po płaskiej poziomej powierzchni - kinematyka miednicy (Syczewska 2010) Płaszczyzna strzałkowa Płaszczyzna czołowa Płaszczyzna poprzeczna
18 Chód po poziomej powierzchni - kinematyka stawu biodrowego (Syczewska 2010) Płaszczyzna strzałkowa Płaszczyzna czołowa Płaszczyzna poprzeczna
19 Analiza funkcji głównej (Wierciak 2007) Układy wykonawcze Układy pomiarowe
20 Wykaz układów wykonawczych urządzenia propozycja (ECO-V 2010) 1. Układ realizacji ruchu stawu biodrowego w płaszczyźnie strzałkowej 2. Układ realizacji ruchu stawu kolanowego w płaszczyźnie strzałkowej 3. Układ realizacji ruchu stawu skokowego w płaszczyźnie strzałkowej
21 Wymagany profil ruchu siłownika stawu kolanowego (ECO-V 2010)
22 Środowisko pracy systemu (ECO-V 2009) Użytkownik Środowisko naturalne Środowisko techniczne Otoczenie prawne Użytkownik Środowisko naturalne Środowisko techniczne Otoczenie prawne
23 Urządzenia: do wprowadzania danych i informujące propozycje 1 (WZWP 2010)

24 Urządzenia: do wprowadzania danych i informujące propozycje 2 ( Estetyka konstrukcji 2009)

25 Urządzenie mechatroniczne (Gawrysiak 1997)
26 Założenia użytkowe - bezpieczeństwo użytkownika (Gawrysiak 1997)
27 Miejsce systemu bezpieczeństwa w projektowanym urządzeniu (ECO-V 2010)
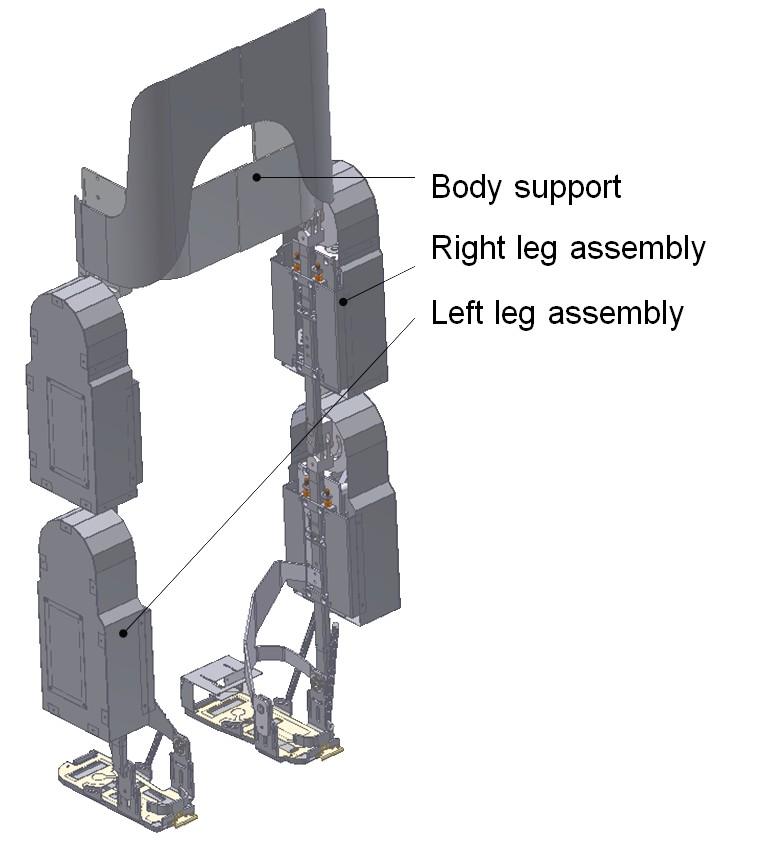
28 Podsystemowa struktura robota



29 Robot zainstalowany na manekinie (ECO 2013)


30 Struktura mechaniczna (Szykiedans 2010) 1 DOF Hip joint 1 DOF 1 DOF Knee joint 1 DOF 1 DOF Ankle joint 1 DOF support for spine of the user; 2,4,6 links; 3 hip joints; 5 knee joints; 7- ankle joints; 8 foot joints. 7 8

 Przeguby Pas")

31 31 Konstrukcja podsystemu mechanicznego (ECO 2011) Przeguby Pas biodrowy z podparciem pleców Struktura nośna Moduły napędowe Stopy
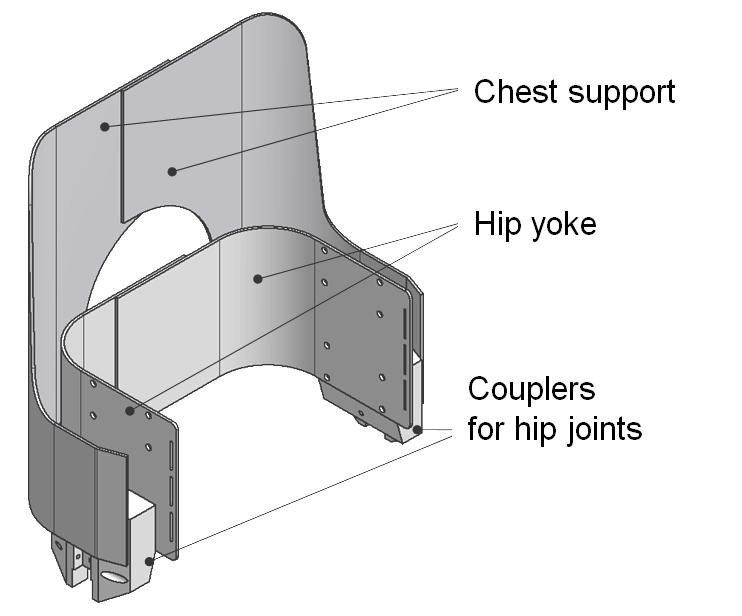
32 Pas piersiowo-biodrowy (ECO 2013)

 Model")
33 Układ wykonawczy ruchu (Credo 2012) Model 3D Prototyp

34 Moduł stopy (Semeniuk 2012)
35 35 Budowa robota podsystem elektroniczny
36 36 Założenia do systemu sterowania (Bojarski 2011) Modular structure Susceptibility for further development and modifications Opportunity for application of various control algorithms
37 37 Struktura systemu sterowania (Bojarski 2011)

38 38 Sterownik nadrzędny (Bojarski 2011) Control of the whole system Readiness to communicate with PC Synchronization of operation of modules Detection of failures Registration of states of the device Measurement of user position


39 39 Sterownik stopy Multipoint measurement of ground reaction force Measurement of ankle joint angular displacement Measurement of distance between foot and an obstacle (ECO 2013)


40 40 Sterownik napędu (ECO 2012)
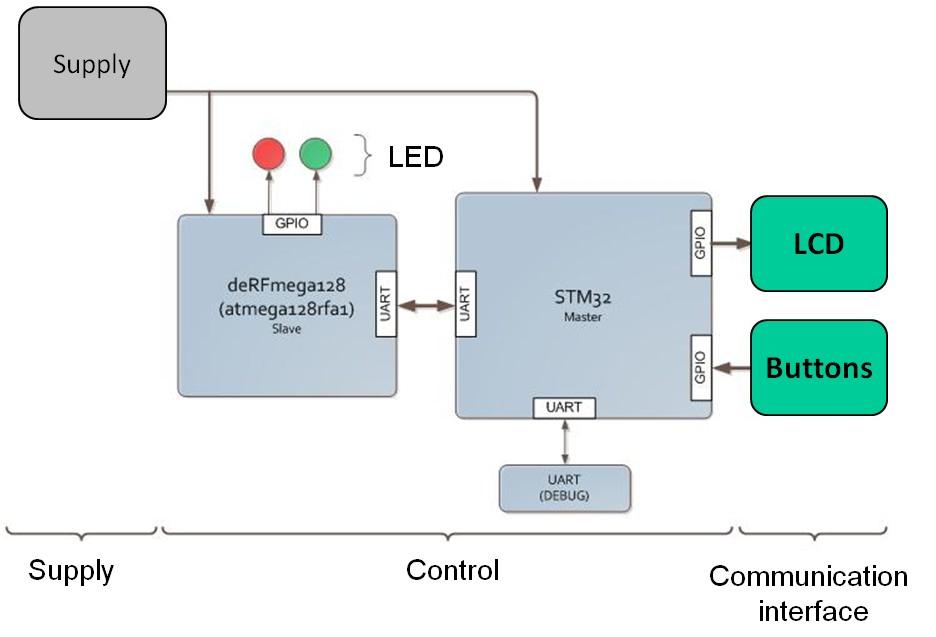
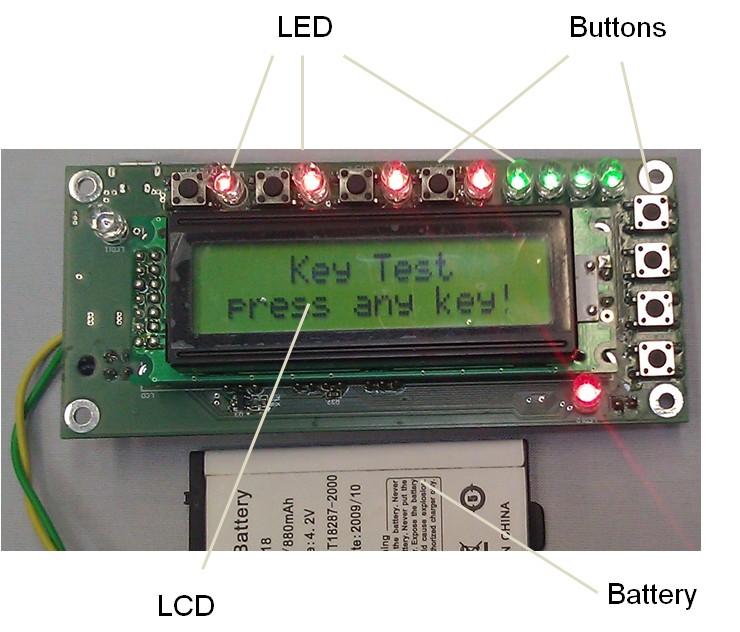
41 Interfejs użytkownika (ECO 2012)

42 42 Akumulatory (Bojarski 2011/ECO 2013) Supply of a system Li-Ion battery Integration with charging system
43 43 Rozmieszczenie układów elektronicznych (Bojarski 2011)
44 44 Modelowanie i symulacja robota
45 Assumptions (Bagiński 2010) Experimental profiles of human joints movements as reference signals for actuators Movements performed in sagittal plane only Three DOF in each leg DC motors employed for drive systems Parts of human body treated as rigid bodies Frictional torques in human joints neglected Contact of feet with the ground modelled as reaction forces arising in proximity of the ground level
46 Fazy chodu człowieka (Whittle 1996)
47 Struktura modelu symulacyjnego (Bagiński 2011)
")
48 Model symulacyjny animacja odpowiedzi (Bagiński 2011)

49 Wyznaczanie momentów w przegubach (Bagiński 2011) wartość Peak value szczytowa M max M= maks 260,1 =260,1 Nm Nm momenty Torques w stawie in hip biodrowym joint momenty Torques w stawie in knee kolanowym joint wartość Peak value szczytowa M max = M261,5 maks =261,5 Nm Nm

50 1,5 1,7 1,9 Parametryzacja modelu (Bagiński 2011)
51 Przykładowe wyniki symulacji 1 (Bagiński 2011)
52 Przykładowe wyniki symulacji 2 (Bagiński 2011)
53 53 Uruchomienie systemu

54 Pierwsze próby (ECO 2012)


55 Stanowisko do badania robota (Kołodziej 2013)

56 Realizacja funkcji chodu (ECO 2015)
57 Integracja podsystemów (Wierciak 2010) Układy wykonawcze Układy pomiarowe
Model procesu projektowania urządzeń mechatronicznych cz. 2
 Jakub Wierciak Model procesu projektowania cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Analiza funkcji systemu (Wierciak
Jakub Wierciak Model procesu projektowania cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Analiza funkcji systemu (Wierciak
Model procesu projektowania urządzeń mechatronicznych cz. 2
 Jakub Wierciak Model procesu projektowania cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Analiza funkcji systemu (Wierciak
Jakub Wierciak Model procesu projektowania cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Analiza funkcji systemu (Wierciak
Wprowadzenie Skręcanie w miejscu (obrót w miejscu) Chodzenie bokiem Kucanie i schylanie się
 Chodzenie bokiem Kucanie i schylanie się") Dwutomowa monografia Ekomobilność stanowi podsumowanie projektu ECO- Mobilność, realizowanego w Politechnice Warszawskiej. Autorzy monografii reprezentują różne specjalności naukowe. Projekt ECO-Mobilność
Dwutomowa monografia Ekomobilność stanowi podsumowanie projektu ECO- Mobilność, realizowanego w Politechnice Warszawskiej. Autorzy monografii reprezentują różne specjalności naukowe. Projekt ECO-Mobilność
Struktury systemów mechatronicznych 2
 Jakub Wierciak Struktury systemów 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Powody integrowania mikroprocesorów z maszynami
Jakub Wierciak Struktury systemów 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Powody integrowania mikroprocesorów z maszynami
INŻYNIERIA REHABILITACYJNA Materiały dydaktyczne 3
 INŻYNIERIA REHABILITACYJNA Materiały dydaktyczne 3 ZAOPATRZENIE ORTOTYCZNE Ortozą nazywamy każde urządzenie kompensujące dysfunkcję układu senso-motorycznego (Wooldrige 1972) Ortoza jest urządzeniem techniczny,
INŻYNIERIA REHABILITACYJNA Materiały dydaktyczne 3 ZAOPATRZENIE ORTOTYCZNE Ortozą nazywamy każde urządzenie kompensujące dysfunkcję układu senso-motorycznego (Wooldrige 1972) Ortoza jest urządzeniem techniczny,
Uwagi wstępne, organizacja zajęć
 Jakub Wierciak Uwagi wstępne, Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Systemy mechatroniczne - wykładowcy (2013) dr inż.
Jakub Wierciak Uwagi wstępne, Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Systemy mechatroniczne - wykładowcy (2013) dr inż.
Uwagi wstępne, organizacja zajęć
 Jakub Wierciak Uwagi wstępne, Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozwój systemów technicznych (Gawrysiak 1997) Mechatronika
Jakub Wierciak Uwagi wstępne, Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozwój systemów technicznych (Gawrysiak 1997) Mechatronika
Zaawansowane, innowacyjne rozwiązania dla transportu miejskiego
 H2020 Transport 2016 call Zaawansowane, innowacyjne rozwiązania dla transportu miejskiego Brokerage event 5 November 2015 KPK 23 października 2015 Prezentują: W. Choromański - Politechnika Warszawska J.
H2020 Transport 2016 call Zaawansowane, innowacyjne rozwiązania dla transportu miejskiego Brokerage event 5 November 2015 KPK 23 października 2015 Prezentują: W. Choromański - Politechnika Warszawska J.
Chód fizjologiczny mgr Ewa Żak Physiotherapy&Medicine
 Chód fizjologiczny mgr Ewa Żak Physiotherapy&Medicine www.pandm.org e.zak@pandm.org Definicja chodu "Rytmiczne gubienie i odzyskiwanie równowagi w zmieniających się na przemian fazach podporu i przenoszenia"
Chód fizjologiczny mgr Ewa Żak Physiotherapy&Medicine www.pandm.org e.zak@pandm.org Definicja chodu "Rytmiczne gubienie i odzyskiwanie równowagi w zmieniających się na przemian fazach podporu i przenoszenia"
www.winiarski.awf.wroc.pl 1
 WPŁYW POZYCJI KOLARZA NA OBRAZ MIOGRAFICZNY GŁÓWNYCH GRUP MIĘŚNIOWYCH KOŃCZYNY DOLNEJ WYKORZYSTYWANYCH PODCZAS JAZDY Maciej Kusiak Sławomir Winiarski Cel badania Cel: Stworzenie profili aktywności mięśniowej
WPŁYW POZYCJI KOLARZA NA OBRAZ MIOGRAFICZNY GŁÓWNYCH GRUP MIĘŚNIOWYCH KOŃCZYNY DOLNEJ WYKORZYSTYWANYCH PODCZAS JAZDY Maciej Kusiak Sławomir Winiarski Cel badania Cel: Stworzenie profili aktywności mięśniowej
ZASTOSOWANIE MODELOWANIA MATEMATYCZNEGO I POMIARÓW EMG DO OCENY CHODU DZIECI Z ZABURZENIAMI NEUROLOGICZNYMI
 MODELOWANIE INŻYNIERSKIE nr 47, ISSN 896-77X ZASTOSOWANIE MODELOWANIA MATEMATYCZNEGO I POMIARÓW EMG DO OCENY CHODU DZIECI Z ZABURZENIAMI NEUROLOGICZNYMI Eugeniusz Świtoński a, Robert Michnik b, Agnieszka
MODELOWANIE INŻYNIERSKIE nr 47, ISSN 896-77X ZASTOSOWANIE MODELOWANIA MATEMATYCZNEGO I POMIARÓW EMG DO OCENY CHODU DZIECI Z ZABURZENIAMI NEUROLOGICZNYMI Eugeniusz Świtoński a, Robert Michnik b, Agnieszka
Model procesu projektowania urządzeń mechatronicznych cz. 1
 Jakub Wierciak Model procesu projektowania cz. 1 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Sterowany proces techniczny Metodyka
Jakub Wierciak Model procesu projektowania cz. 1 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Sterowany proces techniczny Metodyka
LIFTER SZCZEGÓLNIE ZALECANY W NASTĘPUJĄCYCH PRZYPADKACH: WYPOSAŻENIE STANDARDOWE: pionizator
 Lifter LIFTER Pionizator statyczny LIFTER jest nowoczesnym urządzeniem rehabilitacyjnym. Pozwala pacjentowi na samodzielne spionizowanie się w urządzeniu. Możliwe jest to dzięki bardzo mocnemu siłownikowi
Lifter LIFTER Pionizator statyczny LIFTER jest nowoczesnym urządzeniem rehabilitacyjnym. Pozwala pacjentowi na samodzielne spionizowanie się w urządzeniu. Możliwe jest to dzięki bardzo mocnemu siłownikowi
Spis treści Zespół autorski Część I Wprowadzenie 1. Podstawowe problemy transportu miejskiego.transport zrównoważony
 Spis treści Zespół autorski 11 Część I Wprowadzenie 15 1. Podstawowe problemy transportu miejskiego.transport zrównoważony 17 1.1. Uwagi wstępne 17 1.2. Analiza przydatności zastosowań rozwiązań technicznych
Spis treści Zespół autorski 11 Część I Wprowadzenie 15 1. Podstawowe problemy transportu miejskiego.transport zrównoważony 17 1.1. Uwagi wstępne 17 1.2. Analiza przydatności zastosowań rozwiązań technicznych
INSTRUKCJA DO ĆWICZENIA NR 19
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 19 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA TECHNICZNA ALIZA PŁASKIEGO DOWOLNEGO UKŁADU SIŁ NA PODSTAWIE OBCIĄŻENIA
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 19 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA TECHNICZNA ALIZA PŁASKIEGO DOWOLNEGO UKŁADU SIŁ NA PODSTAWIE OBCIĄŻENIA
BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA
 Praca zbiorowa pod redakcją Dagmary Tejszerskiej, Eugeniusza Świtońskiego, Marka Gzika BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA BIOMECHANIKA narządu ruchu człowieka Praca zbiorowa pod redakcją: Dagmary Tejszerskiej
Praca zbiorowa pod redakcją Dagmary Tejszerskiej, Eugeniusza Świtońskiego, Marka Gzika BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA BIOMECHANIKA narządu ruchu człowieka Praca zbiorowa pod redakcją: Dagmary Tejszerskiej
LIFTER SZCZEGÓLNIE ZALECANY W NASTĘPUJĄCYCH PRZYPADKACH: WYPOSAŻENIE STANDARDOWE: pionizator
 Lifter Pionizator statyczny LIFTER jest nowoczesnym urządzeniem rehabilitacyjnym. Pozwala pacjentowi na samodzielne spionizowanie się w urządzeniu. Możliwe jest to dzięki bardzo mocnemu siłownikowi elektrycznemu
Lifter Pionizator statyczny LIFTER jest nowoczesnym urządzeniem rehabilitacyjnym. Pozwala pacjentowi na samodzielne spionizowanie się w urządzeniu. Możliwe jest to dzięki bardzo mocnemu siłownikowi elektrycznemu
MODELOWANIE I SYMULACJA ROBOTA KROCZĄCEGO Z ZASTOSOWANIEM PRZYBORNIKA SIMMECHANICS PAKIETU MATLAB/SIMULINK
 Artykuł Autorski, XI Forum Inżynierskie ProCAx cz II, Kraków 16-18 Października 212 r Dr inż Maciej TROJNACKI Przemysłowy Instytut Automatyki i Pomiarów PIAP Al Jerozolimskie 22, 2-486 Warszawa Telefon:
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz II, Kraków 16-18 Października 212 r Dr inż Maciej TROJNACKI Przemysłowy Instytut Automatyki i Pomiarów PIAP Al Jerozolimskie 22, 2-486 Warszawa Telefon:
Załącznik nr 2a do formularza wniosku w ramach pilotażowego programu Aktywny samorząd Moduł I Obszar B Zadanie nr 1, Obszar C Zadanie nr 1...
 Załącznik nr 2a do formularza wniosku w ramach pilotażowego programu Aktywny samorząd Moduł I Obszar B Zadanie nr 1, Obszar C Zadanie nr 1 1. Imię i nazwisko Pacjenta... 2. PESEL 3. Zakres dysfunkcji narządu
Załącznik nr 2a do formularza wniosku w ramach pilotażowego programu Aktywny samorząd Moduł I Obszar B Zadanie nr 1, Obszar C Zadanie nr 1 1. Imię i nazwisko Pacjenta... 2. PESEL 3. Zakres dysfunkcji narządu
Modelowanie i symulacja urządzeń mechatronicznych (MUM)
") Modelowanie i symulacja urządzeń mechatronicznych (MUM) Studia stacjonarne II stopnia przedmiot wariantowy Wykład: J. Wierciak, dr inż. (p. 612) M. Bodnicki, dr inż. (p. 619) R. Grepl (Ass. Professor TU
Modelowanie i symulacja urządzeń mechatronicznych (MUM) Studia stacjonarne II stopnia przedmiot wariantowy Wykład: J. Wierciak, dr inż. (p. 612) M. Bodnicki, dr inż. (p. 619) R. Grepl (Ass. Professor TU
Biomechanika człowieka i kinematyka stawu kolanowego
 Biomechanika człowieka i kinematyka stawu kolanowego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 1. Terminologia 2. Wstęp do
Biomechanika człowieka i kinematyka stawu kolanowego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego 1. Terminologia 2. Wstęp do
LIFTER. pionizator statyczny
 pionizator statyczny pionizator statyczny Pionizator statyczny TM jest nowoczesnym urządzeniem rehabilitacyjnym. Pozwala pacjentowi na samodzielne spionizowanie się w urządzeniu. Możliwe jest to dzięki
pionizator statyczny pionizator statyczny Pionizator statyczny TM jest nowoczesnym urządzeniem rehabilitacyjnym. Pozwala pacjentowi na samodzielne spionizowanie się w urządzeniu. Możliwe jest to dzięki
TABELA NORM USZCZERBKU NA ZDROWIU EDU PLUS
 Załącznik nr do Ogólnych Warunków Ubezpieczenia Edu Plus zatwierdzonych uchwałą 0/04/03/204 Zarządu InterRisk TU S.A. Vienna Insurance Group z dnia 04.03.204 r. I. USZKODZENIA GŁOWY. ZŁAMANIE KOŚCI POKRYWY
Załącznik nr do Ogólnych Warunków Ubezpieczenia Edu Plus zatwierdzonych uchwałą 0/04/03/204 Zarządu InterRisk TU S.A. Vienna Insurance Group z dnia 04.03.204 r. I. USZKODZENIA GŁOWY. ZŁAMANIE KOŚCI POKRYWY
Fizjoterapia dzieci i niemowląt
 Fizjoterapia dzieci i niemowląt FORU/H www.e-forum.pl www.e-forum.pl FIZJOTERAPIA DZIECI DNIEMOWLĄT FORU/M Wiedza ^usługach rynku strona 1 Spis treści Spis treści NEUROLOGIA 1 Prawidłowy rozwój dziecka
Fizjoterapia dzieci i niemowląt FORU/H www.e-forum.pl www.e-forum.pl FIZJOTERAPIA DZIECI DNIEMOWLĄT FORU/M Wiedza ^usługach rynku strona 1 Spis treści Spis treści NEUROLOGIA 1 Prawidłowy rozwój dziecka
REHASUV ZALECANY DLA OSÓB, U KTÓRYCH ROZPOZNANO: WYPOSAŻENIE STANDARDOWE: pionizator
 REHASUV pionizator pionizator Lekki, bardzo mobilny i wykonany z bardzo wytrzymałych materiałów pionizator dynamiczny. Standardowo wyposażony w składane siodełko, z którego można skorzystać w każdej chwili.
REHASUV pionizator pionizator Lekki, bardzo mobilny i wykonany z bardzo wytrzymałych materiałów pionizator dynamiczny. Standardowo wyposażony w składane siodełko, z którego można skorzystać w każdej chwili.
Biomechaniczne aspekty zaopatrzenia ortopedycznego. Prof. dr hab. inż. Roman Paśniczek
 Biomechaniczne aspekty zaopatrzenia ortopedycznego Prof. dr hab. inż. Roman Paśniczek Główne cele jakie powinny spełniać bierne urządzenia ortotyczne Zapobieganie deformacjom Stabilizacja stawówpodparcie
Biomechaniczne aspekty zaopatrzenia ortopedycznego Prof. dr hab. inż. Roman Paśniczek Główne cele jakie powinny spełniać bierne urządzenia ortotyczne Zapobieganie deformacjom Stabilizacja stawówpodparcie
MODEL MATEMATYCZNY DO ANALIZY CHODU DZIECKA NIEPEŁNOSPRAWNEGO*'
 Aktualne Problemy Biomechaniki, nr 1/2007 15 Agnieszka GŁOWACKA, Koło Naukowe Biomechaniki przy Katedrze Mechaniki Stosowanej, Politechnika Śląska, Gliwice MODEL MATEMATYCZNY DO ANALIZY CHODU DZIECKA NIEPEŁNOSPRAWNEGO*'
Aktualne Problemy Biomechaniki, nr 1/2007 15 Agnieszka GŁOWACKA, Koło Naukowe Biomechaniki przy Katedrze Mechaniki Stosowanej, Politechnika Śląska, Gliwice MODEL MATEMATYCZNY DO ANALIZY CHODU DZIECKA NIEPEŁNOSPRAWNEGO*'
KLASYFIKACJA PROTEZ KOŃCZYN DOLNYCH Z PUNKTU WIDZENIA ICH WĘZŁÓW TARCIA
 PROBLEMY NIEKONWENCJONALNYCH UKŁADÓW ŁOŻYSKOWYCH Lódź,15-16 maja 1996 r. Jan Burcan, Krzysztof Goliński Politechnika Łódzka KLASYFIKACJA PROTEZ KOŃCZYN DOLNYCH Z PUNKTU WIDZENIA ICH WĘZŁÓW TARCIA SŁOWA
PROBLEMY NIEKONWENCJONALNYCH UKŁADÓW ŁOŻYSKOWYCH Lódź,15-16 maja 1996 r. Jan Burcan, Krzysztof Goliński Politechnika Łódzka KLASYFIKACJA PROTEZ KOŃCZYN DOLNYCH Z PUNKTU WIDZENIA ICH WĘZŁÓW TARCIA SŁOWA
Inżynieria rehabilitacji - opis przedmiotu
 Inżynieria rehabilitacji - opis przedmiotu Informacje ogólne Nazwa przedmiotu Inżynieria rehabilitacji Kod przedmiotu 06.9-WM-IB-P-57_15gen Wydział Kierunek Wydział Mechaniczny Inżynieria biomedyczna Profil
Inżynieria rehabilitacji - opis przedmiotu Informacje ogólne Nazwa przedmiotu Inżynieria rehabilitacji Kod przedmiotu 06.9-WM-IB-P-57_15gen Wydział Kierunek Wydział Mechaniczny Inżynieria biomedyczna Profil
ZASTOSOWANIE KOMPUTEROWEGO SYSTEMU POMIAROWEGO PRZY OCENIE CHODU DZIECI
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 37, s. 155-16, Gliwice 29 ZASTOSOWANIE KOMPUTEROWEGO SYSTEMU POMIAROWEGO PRZY OCENIE CHODU DZIECI PAWEŁ JURECZKO*, TOMASZ ŁOSIEŃ**, AGNIESZKA GŁOWACKA-KWIECIEŃ*,
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 37, s. 155-16, Gliwice 29 ZASTOSOWANIE KOMPUTEROWEGO SYSTEMU POMIAROWEGO PRZY OCENIE CHODU DZIECI PAWEŁ JURECZKO*, TOMASZ ŁOSIEŃ**, AGNIESZKA GŁOWACKA-KWIECIEŃ*,
Analiza chodu pacjentów po rekonstrukcji ACL
 Analiza chodu pacjentów po rekonstrukcji ACL - problemy badawcze i wstępne wyniki badań Sławomir Winiarski Katedra Biomechaniki Zespół Biofizyki 1 Więzadło Krzyżowe Przednie (ACL) 1. Fakty Pierwsza wzmianka
Analiza chodu pacjentów po rekonstrukcji ACL - problemy badawcze i wstępne wyniki badań Sławomir Winiarski Katedra Biomechaniki Zespół Biofizyki 1 Więzadło Krzyżowe Przednie (ACL) 1. Fakty Pierwsza wzmianka
ANALIZA BIOMECHANICZNA CHODU DZIECI Z ZASTOSOWANIEM SYSTEMU BTS SMART
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 37, s. 147-154, Gliwice 29 ANALIZA BIOMECHANICZNA CHODU DZIECI Z ZASTOSOWANIEM SYSTEMU BTS SMART KATARZYNA JOCHYMCZYK *, AGNIESZKA GŁOWACKA-KWIECIEŃ *, PAWEŁ JURECZKO
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 37, s. 147-154, Gliwice 29 ANALIZA BIOMECHANICZNA CHODU DZIECI Z ZASTOSOWANIEM SYSTEMU BTS SMART KATARZYNA JOCHYMCZYK *, AGNIESZKA GŁOWACKA-KWIECIEŃ *, PAWEŁ JURECZKO
LIFTER WSKAZANIA DO STOSOWANIA WYPOSAŻENIE STANDARDOWE. pionizator
 Lifter LIFTER Pionizator statyczny LIFTER jest nowoczesnym urządzeniem rehabilitacyjnym. Pozwala pacjentowi na samodzielne spionizowanie się w urządzeniu. Możliwe jest to dzięki bardzo mocnemu siłownikowi
Lifter LIFTER Pionizator statyczny LIFTER jest nowoczesnym urządzeniem rehabilitacyjnym. Pozwala pacjentowi na samodzielne spionizowanie się w urządzeniu. Możliwe jest to dzięki bardzo mocnemu siłownikowi
Analiza numeryczna ruchu ciała ludzkiego poddanego obciążeniu wybuchem Numerical analysis of the human body under explosion
 Analiza numeryczna ruchu ciała ludzkiego poddanego obciążeniu wybuchem Numerical analysis of the human body under explosion Piotr W. SIELICKI, Tomasz GAJEWSKI Instytut Konstrukcji Budowlanych Politechnika
Analiza numeryczna ruchu ciała ludzkiego poddanego obciążeniu wybuchem Numerical analysis of the human body under explosion Piotr W. SIELICKI, Tomasz GAJEWSKI Instytut Konstrukcji Budowlanych Politechnika
Spis treści. Wstęp... 7
 Wstęp.............................................................. 7 I. Plan budowy ciała ludzkiego... 9 Okolice ciała ludzkiego........................................................................
Wstęp.............................................................. 7 I. Plan budowy ciała ludzkiego... 9 Okolice ciała ludzkiego........................................................................
PARAPION ACTIVE. pionizator statyczny
 PARAPION ACTIVE pionizator statyczny pionizator statyczny Pionizator statyczny TM umożliwia pełną pionizację pacjenta i daje możliwość samodzielnego przemieszczania się. Otwiera to nowe horyzonty i przełamuje
PARAPION ACTIVE pionizator statyczny pionizator statyczny Pionizator statyczny TM umożliwia pełną pionizację pacjenta i daje możliwość samodzielnego przemieszczania się. Otwiera to nowe horyzonty i przełamuje
IDENTYFIKACJA I ANALIZA PARAMETRÓW GEOMETRYCZNYCH I MECHANICZNYCH KOŚCI MIEDNICZNEJ CZŁOWIEKA
 POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1651 Antoni JOHN SUB Gottingen 7 217 780 458 2005 A 3012 IDENTYFIKACJA I ANALIZA PARAMETRÓW GEOMETRYCZNYCH I MECHANICZNYCH KOŚCI MIEDNICZNEJ CZŁOWIEKA Gliwice 2004
POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1651 Antoni JOHN SUB Gottingen 7 217 780 458 2005 A 3012 IDENTYFIKACJA I ANALIZA PARAMETRÓW GEOMETRYCZNYCH I MECHANICZNYCH KOŚCI MIEDNICZNEJ CZŁOWIEKA Gliwice 2004
Wózek inwalidzki jako pomoc techniczna w lokomocji biernej. Romuald Będziński
 Wózek inwalidzki jako pomoc techniczna w lokomocji biernej Romuald Będziński Wrocław 2008 Plan prezentacji Niepełnosprawność w Polsce i na Świecie Definicje podstawowych pojęć Klasyfikacja wózków inwalidzkich
Wózek inwalidzki jako pomoc techniczna w lokomocji biernej Romuald Będziński Wrocław 2008 Plan prezentacji Niepełnosprawność w Polsce i na Świecie Definicje podstawowych pojęć Klasyfikacja wózków inwalidzkich
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Spis treści. Wstęp. I. Plan budowy ciała ludzkiego 9 Okolice ciata ludzkiego Układy narządów *P. Określenie orientacyjne w przestrzeni
 Wstęp 7 I. Plan budowy ciała ludzkiego 9 Okolice ciata ludzkiego Układy narządów *P Określenie orientacyjne w przestrzeni Płaszczyzny ciała Osie ciała II. Układ bierny i czynny ruchu (osteologia, syndesmołogia,
Wstęp 7 I. Plan budowy ciała ludzkiego 9 Okolice ciata ludzkiego Układy narządów *P Określenie orientacyjne w przestrzeni Płaszczyzny ciała Osie ciała II. Układ bierny i czynny ruchu (osteologia, syndesmołogia,
Informatyka studia stacjonarne pierwszego stopnia
 #382 #379 Internetowy system obsługi usterek w sieciach handlowych (The internet systems of detection of defects in trade networks) Celem pracy jest napisanie aplikacji w języku Java EE. Główne zadania
#382 #379 Internetowy system obsługi usterek w sieciach handlowych (The internet systems of detection of defects in trade networks) Celem pracy jest napisanie aplikacji w języku Java EE. Główne zadania
Spis Tabel i rycin. Spis tabel
 Spis Tabel i rycin Spis tabel 1. Podział stawów ze względu na ilość osi ruchów i ukształtowanie powierzchni stawowych. 20 2. Nazwy ruchów w stawach człowieka w pozycji anatomicznej..... 21 3. Zestawienie
Spis Tabel i rycin Spis tabel 1. Podział stawów ze względu na ilość osi ruchów i ukształtowanie powierzchni stawowych. 20 2. Nazwy ruchów w stawach człowieka w pozycji anatomicznej..... 21 3. Zestawienie
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna Kod przedmiotu/ modułu* Wydział (nazwa jednostki
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna Kod przedmiotu/ modułu* Wydział (nazwa jednostki
Anatomia, Kinezjologia. Anatomia topograficzna. mgr E. Kamińska 2 ECTS F-1-K-AT-06 studia
 Nazwa jednostki prowadzącej kierunek: Nazwa kierunku: Poziom kształcenia: Profil kształcenia: Moduły wprowadzające / wymagania wstępne: Nazwa modułu (przedmiot lub grupa przedmiotów): Osoby prowadzące:
Nazwa jednostki prowadzącej kierunek: Nazwa kierunku: Poziom kształcenia: Profil kształcenia: Moduły wprowadzające / wymagania wstępne: Nazwa modułu (przedmiot lub grupa przedmiotów): Osoby prowadzące:
MODEL CHODU ROBOTA DWUNOŻNEGO W ŚRODOWISKU MATLAB MODEL OF BIPED ROBOT GAIT IN MATLAB ENVIROMENT
 Hudziak Wojciech, inż. email: hudini01@vp.pl Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL CHODU ROBOTA DWUNOŻNEGO W ŚRODOWISKU MATLAB Streszczenie:
Hudziak Wojciech, inż. email: hudini01@vp.pl Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL CHODU ROBOTA DWUNOŻNEGO W ŚRODOWISKU MATLAB Streszczenie:
Automatyka i Robotyka studia stacjonarne drugiego stopnia
 #384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
#384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
PROGRAM KURSU. Terapia Manualna Holistyczna Tkanek Miękkich
 PROGRAM KURSU Terapia Manualna Holistyczna Tkanek Miękkich MODUŁ I Koncepcja Terapii Manualnej Holistycznej. Miednica, stawy biodrowe, segmenty ruchowe kręgosłupa lędźwiowego i przejścia piersiowo-lędźwiowego.
PROGRAM KURSU Terapia Manualna Holistyczna Tkanek Miękkich MODUŁ I Koncepcja Terapii Manualnej Holistycznej. Miednica, stawy biodrowe, segmenty ruchowe kręgosłupa lędźwiowego i przejścia piersiowo-lędźwiowego.
OPRACOWANIE KONCEPCJI WSPÓŁPRACY SYSTEMU PIONIZACJI I WSPOMAGANIA RUCHU VENI Z PRT
 Bogusz Radziemski, Krzysztof Getko, Danuta Jasińska-Choromańska, Jakub Wierciak, Ksawery Szykiedans Zakład Konstrukcji Urządzeń Precyzyjnych, Instytut Mikromechaniki i Fotoniki Politechnika Warszawska
Bogusz Radziemski, Krzysztof Getko, Danuta Jasińska-Choromańska, Jakub Wierciak, Ksawery Szykiedans Zakład Konstrukcji Urządzeń Precyzyjnych, Instytut Mikromechaniki i Fotoniki Politechnika Warszawska
PROBLEMY PROJEKTOWANIA NAPĘDÓW DO UKŁADU WSPOMAGANIA RUCHU OSÓB NIEPEŁNOSPRAWNYCH
 Aktualne Problemy Biomechaniki, nr 6/2012 43 Danuta JASIŃSKA-CHOROMAŃSKA, Wojciech CREDO, Ksawery SZYKIEDANS, Łukasz RZESZOTEK, Jan SEMENIUK, Marcin ZACZYK, Instytut Mikromechaniki i Fotoniki, Politechnika
Aktualne Problemy Biomechaniki, nr 6/2012 43 Danuta JASIŃSKA-CHOROMAŃSKA, Wojciech CREDO, Ksawery SZYKIEDANS, Łukasz RZESZOTEK, Jan SEMENIUK, Marcin ZACZYK, Instytut Mikromechaniki i Fotoniki, Politechnika
Program 1 dnia: Trening medyczny w treningu personalnym dzień I
 Program - trener medyczny Health Factory Nowoczesny trener musi sprostać licznym wyzwaniom. Jednym z najważniejszych jest przywrócenie klienta do stanu pełnej sprawności. Siedzący tryb życia, brak ruchu,
Program - trener medyczny Health Factory Nowoczesny trener musi sprostać licznym wyzwaniom. Jednym z najważniejszych jest przywrócenie klienta do stanu pełnej sprawności. Siedzący tryb życia, brak ruchu,
Biomechanika. dr n.med. Robert Santorek 2 ECTS F-1-P-B-18 studia
 Nazwa jednostki prowadzącej kierunek: Nazwa kierunku: Poziom kształcenia: Profil kształcenia: Moduły wprowadzające / wymagania wstępne: Nazwa modułu (przedmiot lub grupa przedmiotów): Osoby prowadzące:
Nazwa jednostki prowadzącej kierunek: Nazwa kierunku: Poziom kształcenia: Profil kształcenia: Moduły wprowadzające / wymagania wstępne: Nazwa modułu (przedmiot lub grupa przedmiotów): Osoby prowadzące:
DATA-S EASY MONITORING ROZPROSZONY OŚWIETLENIA AWARYJNEGO DIVERSIFIED MONITORING OF EMERGENCY LIGHTING
 Wymiary Dimensions 252x462x99 IP40 DATA-S EASY MONITORING ROZPROSZONY OŚWIETLENIA AWARYJNEGO System monitoruje prawidłową pracę zainstalowanych opraw oświetlenia awaryjnego w małych i średnich obiektach
Wymiary Dimensions 252x462x99 IP40 DATA-S EASY MONITORING ROZPROSZONY OŚWIETLENIA AWARYJNEGO System monitoruje prawidłową pracę zainstalowanych opraw oświetlenia awaryjnego w małych i średnich obiektach
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
3 zasada dynamiki Newtona
 Siła a Reakcji Podłoża Ground Reaction Force (GRF) 3 zasada dynamiki Newtona Cięż ężar pudełka generuje w podłożu u siłę reakcji, która jest równa r cięż ężarowi co do wartości, ale ma przeciwny zwrot.
Siła a Reakcji Podłoża Ground Reaction Force (GRF) 3 zasada dynamiki Newtona Cięż ężar pudełka generuje w podłożu u siłę reakcji, która jest równa r cięż ężarowi co do wartości, ale ma przeciwny zwrot.
4. EKSPLOATACJA UKŁADU NAPĘD ZWROTNICOWY ROZJAZD. DEFINICJA SIŁ W UKŁADZIE Siła nastawcza Siła trzymania
 3 SPIS TREŚCI Przedmowa... 11 1. WPROWADZENIE... 13 1.1. Budowa rozjazdów kolejowych... 14 1.2. Napędy zwrotnicowe... 15 1.2.1. Napęd zwrotnicowy EEA-4... 18 1.2.2. Napęd zwrotnicowy EEA-5... 20 1.3. Współpraca
3 SPIS TREŚCI Przedmowa... 11 1. WPROWADZENIE... 13 1.1. Budowa rozjazdów kolejowych... 14 1.2. Napędy zwrotnicowe... 15 1.2.1. Napęd zwrotnicowy EEA-4... 18 1.2.2. Napęd zwrotnicowy EEA-5... 20 1.3. Współpraca
Szczegółowy cennik badań
 NZ0Z PANORAMIK CENTRUM DIAGNOSTYCZNE SC Szczegółowy cennik badań Zdjęcia stomatologiczne: Pantomogram 75,- Cefalometria /Tele/. 75,- Pantomogram + CD..... 80,- Cefalometria /Tele/ + CD... 80,- Pantomogram
NZ0Z PANORAMIK CENTRUM DIAGNOSTYCZNE SC Szczegółowy cennik badań Zdjęcia stomatologiczne: Pantomogram 75,- Cefalometria /Tele/. 75,- Pantomogram + CD..... 80,- Cefalometria /Tele/ + CD... 80,- Pantomogram
Laboratorium z Biomechatroniki
 Wydział: Mechaniczny Technologiczny Kierunek: Grupa dziekańska: Semestr: pierwszy Dzień laboratorium: Godzina: Laboratorium z Biomechatroniki Ćwiczenie 4 Test goniometryczny (wahadło Wartenberga). . CEL
Wydział: Mechaniczny Technologiczny Kierunek: Grupa dziekańska: Semestr: pierwszy Dzień laboratorium: Godzina: Laboratorium z Biomechatroniki Ćwiczenie 4 Test goniometryczny (wahadło Wartenberga). . CEL
SMART WSKAZANIA DO STOSOWANIA KOLORYSTYKA WYPOSAŻENIE STANDARDOWE. pionizator statyczny
 Smart pionizator SMART pionizator statyczny Pionizator statyczny SMART to łatwe w obsłudze, lekkie, a przy tym wytrzymałe i stabilne urządzenie, umożliwiające pełną pionizację pacjenta. Prostota obsługi
Smart pionizator SMART pionizator statyczny Pionizator statyczny SMART to łatwe w obsłudze, lekkie, a przy tym wytrzymałe i stabilne urządzenie, umożliwiające pełną pionizację pacjenta. Prostota obsługi
Autoreferat Rozprawy Doktorskiej
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
I nforma c j e ogólne. Biomechanika. Nie dotyczy. Pierwszy. Wykłady - 30 godz., Ćwiczenia 20 godz. Dr hab. n. zdr. Anna Lubkowska
 S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika Obowiązkowy Wydział
S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika Obowiązkowy Wydział
ZOFIA IGNASIAK WYDANIE II ELSEYIER URBAN&PARTNER
 ZOFIA IGNASIAK ELSEYIER URBAN&PARTNER WYDANIE II Zofia Ignasiak Anatomia układu ruchu Wydanie II Elsevier Urban & Partner Wrocław \ Spis treści J Wstęp... I. Plan budowy ciała ludzkiego... Okolice ciała
ZOFIA IGNASIAK ELSEYIER URBAN&PARTNER WYDANIE II Zofia Ignasiak Anatomia układu ruchu Wydanie II Elsevier Urban & Partner Wrocław \ Spis treści J Wstęp... I. Plan budowy ciała ludzkiego... Okolice ciała
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 26/17
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229343 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419886 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl. A61F 2/38 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229343 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419886 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl. A61F 2/38 (2006.01)
PL B1. Mechanizm z dostosowaniem trajektorii w czasie rzeczywistym, zwłaszcza ortezy kolana ludzkiego. POLITECHNIKA WROCŁAWSKA, Wrocław, PL
 PL 228031 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228031 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419888 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl.
PL 228031 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228031 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419888 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl.
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2008 Seria: AUTOMATYKA z.
 ZESZYTY NAUKOWE POITECHNIKI ŚĄSKIEJ 2008 Seria: AUTOMATYKA z. Nr kol. Artur BABIARZ, Krzysztof JASKOT Politechnika Śląska ANAIZA RUCHU ROBOTA DWUNOŻNEGO Streszczenie. W pracy zaprezentowano kinematykę
ZESZYTY NAUKOWE POITECHNIKI ŚĄSKIEJ 2008 Seria: AUTOMATYKA z. Nr kol. Artur BABIARZ, Krzysztof JASKOT Politechnika Śląska ANAIZA RUCHU ROBOTA DWUNOŻNEGO Streszczenie. W pracy zaprezentowano kinematykę
PROBLEMY NIEKONWENCJONALNYCH UKŁADÓW ŁOŻYSKOWYCH. Łódź maja 1997 r. SYMULATOR DO BADAŃ TRWAŁOŚCI ENDOPROTEZ STAWU KOLANOWEGO CZŁOWIEKA
 PROBLEMY NIEKONWENCJONALNYCH UKŁADÓW ŁOŻYSKOWYCH Łódź 15-16 maja 1997 r. Adam Wieczorek, Monika Gierzyńska-Dolna Instytut Obróbki Plastycznej Metali i Tworzyw Sztucznych Politechniki Częstochowskiej SYMULATOR
PROBLEMY NIEKONWENCJONALNYCH UKŁADÓW ŁOŻYSKOWYCH Łódź 15-16 maja 1997 r. Adam Wieczorek, Monika Gierzyńska-Dolna Instytut Obróbki Plastycznej Metali i Tworzyw Sztucznych Politechniki Częstochowskiej SYMULATOR
Genium zastosowanie. Certyfikat C-Leg & Genium
 Genium zastosowanie Certyfikat C-Leg & Genium Technologia Genium Zasilanie- akumulator Hydraulika Elektronika + Bluetooth Żyroskop- rozpoznaje położenie protezy 2 osiowe accelerometery- czujniki ruchu-przyspieszenia
Genium zastosowanie Certyfikat C-Leg & Genium Technologia Genium Zasilanie- akumulator Hydraulika Elektronika + Bluetooth Żyroskop- rozpoznaje położenie protezy 2 osiowe accelerometery- czujniki ruchu-przyspieszenia
Przeciwpożarowe sterowniki dla bram zwijanych, sekcyjnych i przesuwnych. Fire-proof controls for roller shutters, sectional doors and sliding gates
 Przeciwpożarowe napędy bram Charakterystyka Characteristics Fire-proof door drives 36 Przeciwpożarowe sterowniki dla bram zwijanych, sekcyjnych i przesuwnych Fire-proof controls for roller shutters, sectional
Przeciwpożarowe napędy bram Charakterystyka Characteristics Fire-proof door drives 36 Przeciwpożarowe sterowniki dla bram zwijanych, sekcyjnych i przesuwnych Fire-proof controls for roller shutters, sectional
AKADEMIA GÓRNICZO - HUTNICZA
 AKADEMIA GÓRNICZO - HUTNICZA Im. Stanisława Staszica w Krakowie WYDZIAŁ INŻYNIERII MECHANICZNEJ I ROBOTYKI Rozprawa doktorska SYNTEZA UKŁADU STEROWANIA MECHANIZMU O STRUKTURZE RÓWNOLEGŁO - SZEREGOWEJ autor
AKADEMIA GÓRNICZO - HUTNICZA Im. Stanisława Staszica w Krakowie WYDZIAŁ INŻYNIERII MECHANICZNEJ I ROBOTYKI Rozprawa doktorska SYNTEZA UKŁADU STEROWANIA MECHANIZMU O STRUKTURZE RÓWNOLEGŁO - SZEREGOWEJ autor
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Źródła zagrożeń oraz ergonomiczne czynniki ryzyka na stanowisku wyposażonym w monitor ekranowy
 Źródła zagrożeń oraz ergonomiczne czynniki ryzyka na stanowisku wyposażonym w monitor ekranowy Wymagania minimalne [Dz.U.1998.148.973] Minimalne wymagania bezpieczeństwa i higieny pracy oraz ergonomii
Źródła zagrożeń oraz ergonomiczne czynniki ryzyka na stanowisku wyposażonym w monitor ekranowy Wymagania minimalne [Dz.U.1998.148.973] Minimalne wymagania bezpieczeństwa i higieny pracy oraz ergonomii
ŚWIĘTOKRZYSKIE CENTRUM ONKOLOGII Zakład Rehabilitacji
 ŚWIĘTOKRZYSKIE CENTRUM ONKOLOGII Zakład Rehabilitacji Kierownik: dr n. med. Anna Opuchlik Opracowanie: mgr Piotr Siwoń ZESTAW ĆWICZEŃ DLA PACJENTÓW KLINIKI ONKOLOGII KLINICZNEJ DZIAŁU CHEMIOTERAPII Z poniższego
ŚWIĘTOKRZYSKIE CENTRUM ONKOLOGII Zakład Rehabilitacji Kierownik: dr n. med. Anna Opuchlik Opracowanie: mgr Piotr Siwoń ZESTAW ĆWICZEŃ DLA PACJENTÓW KLINIKI ONKOLOGII KLINICZNEJ DZIAŁU CHEMIOTERAPII Z poniższego
CENNIK. Świętokrzyska 18 00-052 Warszawa. tel.: (22) 418 24 09 tel.: 665 164 411 www.panoramikcd.com.pl kontakt@panoramikcd.com.pl
 418 24 09 tel.: 665 164 411 www.panoramikcd.com.pl kontakt@panoramikcd.com.pl") Świętokrzyska 18 00-052 Warszawa tel.: (22) 418 24 09 tel.: 665 164 411 www.panoramikcd.com.pl kontakt@panoramikcd.com.pl Godziny otwarcia poniedziałek - piątek: 8.00-20.00 sobota: 9.00-15.00 CENNIK ZDJĘCIA
Świętokrzyska 18 00-052 Warszawa tel.: (22) 418 24 09 tel.: 665 164 411 www.panoramikcd.com.pl kontakt@panoramikcd.com.pl Godziny otwarcia poniedziałek - piątek: 8.00-20.00 sobota: 9.00-15.00 CENNIK ZDJĘCIA
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
OFERTA UBEZPIECZENIA. Zamówienie ubezpieczeń: 1. Ubezpieczenie NNW dzieci przedszkolnych
 OFERTA UBEZPIECZENIA Zamówienie ubezpieczeń: 1. Ubezpieczenie NNW dzieci przedszkolnych Zakres i warunki ubezpieczenia Suma Ubezpieczenia Wariant Śmierć ubezpieczonego w wyniku nieszczęśliwego wypadku
OFERTA UBEZPIECZENIA Zamówienie ubezpieczeń: 1. Ubezpieczenie NNW dzieci przedszkolnych Zakres i warunki ubezpieczenia Suma Ubezpieczenia Wariant Śmierć ubezpieczonego w wyniku nieszczęśliwego wypadku
BADANIA INTERAKCJI W UKŁADZIE WIELOCZŁONOWYM TELEMANIPULATORA KARDIOCHIRURGICZNEGO CHIRURG-ZADAJNIK RUCHU-NARZĘDZIE TORAKOSKOPOWE
 Aktualne Problemy Biomechaniki, nr 1/2007 65 Grzegorz 1LEWICZ, Robert MICHNIK, Dagmara TEJSZERSKA, Katedra Mechaniki Stosowanej, Zakład Mechaniki Ogólnej i Biomechaniki, Politechnika Śląska, Gliwice Zbigniew
Aktualne Problemy Biomechaniki, nr 1/2007 65 Grzegorz 1LEWICZ, Robert MICHNIK, Dagmara TEJSZERSKA, Katedra Mechaniki Stosowanej, Zakład Mechaniki Ogólnej i Biomechaniki, Politechnika Śląska, Gliwice Zbigniew
SPECYFIKACJA TECHNICZNA PRZEDMIOTU OFERTY
 Załącznik 1 SPECYFIKACJA TECHNICZNA PRZEDMIOTU OFERTY Pozycja 1 I Trzystanowiskowe urządzenie do treningu funkcjonalnego - szt. 1 1. Dwa regulowane ramiona w każdym stanowisku pozwalające na trening w
Załącznik 1 SPECYFIKACJA TECHNICZNA PRZEDMIOTU OFERTY Pozycja 1 I Trzystanowiskowe urządzenie do treningu funkcjonalnego - szt. 1 1. Dwa regulowane ramiona w każdym stanowisku pozwalające na trening w
Neurogenne zwichnięcie stawu biodrowego u chorych z mózgowym porażeniem dziecięcym
 Neurogenne zwichnięcie stawu biodrowego u chorych z mózgowym porażeniem dziecięcym Marek Jóźwiak Klinika Ortopedii i Traumatologii Dziecięcej Uniwersytetu Medycznego im. K. Marcinkowskiego w Poznaniu Neurogenne
Neurogenne zwichnięcie stawu biodrowego u chorych z mózgowym porażeniem dziecięcym Marek Jóźwiak Klinika Ortopedii i Traumatologii Dziecięcej Uniwersytetu Medycznego im. K. Marcinkowskiego w Poznaniu Neurogenne
KARTA BADANIA ORTOPEDYCZNEGO PSA
 mezenchymalnych macierzystych w leczeniu schorzeń narządu ruchu u psów. Imię psa Rasa psa Wiek Płeć Waga Uwagi Z jakim problemem przyprowadzono psa? WYWIAD Niechęć do biegania 1 miesiąc po podaniu... 3
mezenchymalnych macierzystych w leczeniu schorzeń narządu ruchu u psów. Imię psa Rasa psa Wiek Płeć Waga Uwagi Z jakim problemem przyprowadzono psa? WYWIAD Niechęć do biegania 1 miesiąc po podaniu... 3
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Rodzaj obliczeń. Data Nazwa klienta Ref. Napędy z pasami klinowymi normalnoprofilowymi i wąskoprofilowymi 4/16/ :53:55 PM
 Rodzaj obliczeń Data Nazwa klienta Ref Napędy z pasami klinowymi normalnoprofilowymi i wąskoprofilowymi 4/16/2007 10:53:55 PM Rodzaj obciążenia, parametry pracy Calculation Units SI Units (N, mm, kw...)
Rodzaj obliczeń Data Nazwa klienta Ref Napędy z pasami klinowymi normalnoprofilowymi i wąskoprofilowymi 4/16/2007 10:53:55 PM Rodzaj obciążenia, parametry pracy Calculation Units SI Units (N, mm, kw...)
1. Zakład Radiologii z Pracownią Tomografii Komputerowej
 1. Zakład Radiologii z Pracownią Tomografii Komputerowej Lp. INDEKS NAZWA USŁUGI CENA 1 ZRTG-001 2 ZRTG-002 Komputerowa tomografia jamy brzusznej i miednicy bez kontrastu Komputerowa tomografia jamy brzusznej
1. Zakład Radiologii z Pracownią Tomografii Komputerowej Lp. INDEKS NAZWA USŁUGI CENA 1 ZRTG-001 2 ZRTG-002 Komputerowa tomografia jamy brzusznej i miednicy bez kontrastu Komputerowa tomografia jamy brzusznej
WADY STATYCZNE KOŃCZYN DOLNYCH
 Slajd 1 Slajd 2 Slajd 3 WADY STATYCZNE KOŃCZYN DOLNYCH BUDOWA I CZYNNOŚĆ STOPY Jest uwarunkowana jej funkcją: podporową, nośną i amortyzacyjną. Budowa stopy jest dostosowana przede wszystkim do lokomocji.
Slajd 1 Slajd 2 Slajd 3 WADY STATYCZNE KOŃCZYN DOLNYCH BUDOWA I CZYNNOŚĆ STOPY Jest uwarunkowana jej funkcją: podporową, nośną i amortyzacyjną. Budowa stopy jest dostosowana przede wszystkim do lokomocji.
2, 5, 6, 12, 18. odpowiedzialności zakładu ubezpieczeń 2. uprawniające do odmowy wypłaty odszkodowania i innych świadczeń lub ich obniżenia
 Aneks zmieniający z dniem kwietnia 0 r. postanowienia ogólnych warunków ubezpieczenia następstw nieszczęśliwych wypadków kierowcy i pasażerów pojazdu mechanicznego (NNW) (wprowadzonych do obrotu z dniem
Aneks zmieniający z dniem kwietnia 0 r. postanowienia ogólnych warunków ubezpieczenia następstw nieszczęśliwych wypadków kierowcy i pasażerów pojazdu mechanicznego (NNW) (wprowadzonych do obrotu z dniem
Nowa kategoryzacja na przykładzie wózków inwalidzkich
 Nowa kategoryzacja na przykładzie wózków inwalidzkich założenia metodologiczne, korzyści dla pacjenta i systemu dr inż. Maciej Sydor Plan prezentacji Założenia metodologiczne Korzyści dla pacjenta i systemu
Nowa kategoryzacja na przykładzie wózków inwalidzkich założenia metodologiczne, korzyści dla pacjenta i systemu dr inż. Maciej Sydor Plan prezentacji Założenia metodologiczne Korzyści dla pacjenta i systemu
AKTUALNY WYKAZ KODÓW I LIMITÓW NFZ PRODUKTÓW ORTOPEDYCZNYCH, ZGODNYCH Z ROZPORZĄDZENIEM MINISTRA ZDROWIA Z DNIA 06.12.2013 ROK
 AKTUALNY WYKAZ KODÓW I LIMITÓW NFZ PRODUKTÓW ORTOPEDYCZNYCH, ZGODNYCH Z ROZPORZĄDZENIEM MINISTRA ZDROWIA Z DNIA 06.12.2013 ROK KOD NFZ NAZWA WYROBU MEDYCZNEGO WG. NFZ WYSOKOŚĆ LIMITU GRUPA "A" - WYROBY
AKTUALNY WYKAZ KODÓW I LIMITÓW NFZ PRODUKTÓW ORTOPEDYCZNYCH, ZGODNYCH Z ROZPORZĄDZENIEM MINISTRA ZDROWIA Z DNIA 06.12.2013 ROK KOD NFZ NAZWA WYROBU MEDYCZNEGO WG. NFZ WYSOKOŚĆ LIMITU GRUPA "A" - WYROBY
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
STEROWANIE A REGULACJA
 STEROWANIE A REGULACJA Sterowanie to proces nerwowo-mięśniowy (dwukierunkowy) - współdziałanie ukł. nerwowego z ukł. mięśniowym - podporządkowanie ukł. mięśniowego (ukł. sterowania) układowi nerwowemu
STEROWANIE A REGULACJA Sterowanie to proces nerwowo-mięśniowy (dwukierunkowy) - współdziałanie ukł. nerwowego z ukł. mięśniowym - podporządkowanie ukł. mięśniowego (ukł. sterowania) układowi nerwowemu
Usprawnianie stawu kolanowego po alloplastyce na schodach wg. Terapii NAP
 Usprawnianie stawu kolanowego po alloplastyce na schodach wg. Terapii NAP Pacjentka lat 59 po endoprotezoplastyce lewego stawu kolanowego rozpoczęła rehabilitację wg terapii N.A.P. w Krakowskim Centrum
Usprawnianie stawu kolanowego po alloplastyce na schodach wg. Terapii NAP Pacjentka lat 59 po endoprotezoplastyce lewego stawu kolanowego rozpoczęła rehabilitację wg terapii N.A.P. w Krakowskim Centrum
FIZJOTERAPIA W PRAKTYCE
 PROGRAM STUDIÓW FIZJOTERAPIA W PRAKTYCE MODUŁ I. Kompleks barkowo-ramienny 20 godzin struktur stawowych i okołostawowych MODUŁ II. Kompleks barkowo-ramienny, kręgosłup szyjny (staw szczytowo-potyliczny
PROGRAM STUDIÓW FIZJOTERAPIA W PRAKTYCE MODUŁ I. Kompleks barkowo-ramienny 20 godzin struktur stawowych i okołostawowych MODUŁ II. Kompleks barkowo-ramienny, kręgosłup szyjny (staw szczytowo-potyliczny
A.l. KAPANDJI ELSEVIER. URBAN&PARTNER FUNKCJONALNA STAWÓW
 A.l. KAPANDJI ELSEVIER. URBAN&PARTNER m m o m m FUNKCJONALNA STAWÓW ANATOMIA FUNKCJONALNA Tom 2 Kończyna dolna A.l. KAPANDJI Stowo wstępne: Profesor Thierry Judet 798 oryginalnych ilustracji autora Redakcja
A.l. KAPANDJI ELSEVIER. URBAN&PARTNER m m o m m FUNKCJONALNA STAWÓW ANATOMIA FUNKCJONALNA Tom 2 Kończyna dolna A.l. KAPANDJI Stowo wstępne: Profesor Thierry Judet 798 oryginalnych ilustracji autora Redakcja
OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ 1
 OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ 1 Poz. A Przedmiot zamówienia Techniczne, funkcjonalne i użytkowe wymagania Zamawiającego Oferowane przez Wykonawców produkty muszą posiadać parametry nie gorsze niż wskazane
OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ 1 Poz. A Przedmiot zamówienia Techniczne, funkcjonalne i użytkowe wymagania Zamawiającego Oferowane przez Wykonawców produkty muszą posiadać parametry nie gorsze niż wskazane
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, ćwiczenia, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE.
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, ćwiczenia, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE.
ACTIVALL ZALECANY DLA OSÓB, U KTÓRYCH ROZPOZNANO: WYPOSAŻENIE STANDARDOWE: pionizator
 ACTIVALL pionizator ACTIVALL pionizator Pionizator ACTIVALLTM jest szczególnie doceniany w codziennej rehabilitacji pacjentów zarówno w warunkach domowych, jak i szpitalnych. Urządzenie pozwala na pełną
ACTIVALL pionizator ACTIVALL pionizator Pionizator ACTIVALLTM jest szczególnie doceniany w codziennej rehabilitacji pacjentów zarówno w warunkach domowych, jak i szpitalnych. Urządzenie pozwala na pełną
SENIOR. 2 www.inter-play.info
 katalog 2013 Wyselekcjonowane ćwiczenia dla osób starszych. Wysiłek w parku z przyjaciółi to doskonały poysł na aktywne spędzenie dnia. Urządzenia SENIOR są odpowiednio przystosowane dla osób w podeszły
katalog 2013 Wyselekcjonowane ćwiczenia dla osób starszych. Wysiłek w parku z przyjaciółi to doskonały poysł na aktywne spędzenie dnia. Urządzenia SENIOR są odpowiednio przystosowane dla osób w podeszły
Jolanta Malec Wpływ rehabilitacji na poprawę wydolności fizycznej osób niepełnosprawnych ruchowo
 Jolanta Malec Wpływ rehabilitacji na poprawę wydolności fizycznej osób niepełnosprawnych ruchowo Acta Scientifica Academiae Ostroviensis nr 28, 161-165 2007 Wpływ Rehabilitacji na Poprawę Wydolności Fizycznej
Jolanta Malec Wpływ rehabilitacji na poprawę wydolności fizycznej osób niepełnosprawnych ruchowo Acta Scientifica Academiae Ostroviensis nr 28, 161-165 2007 Wpływ Rehabilitacji na Poprawę Wydolności Fizycznej
Funkcjonowanie narządu ruchu. Kinga Matczak
 Funkcjonowanie narządu ruchu Kinga Matczak Narząd ruchu zapewnia człowiekowi utrzymanie prawidłowej postawy ciała, dowolne zmiany pozycji i przemieszczanie się w przestrzeni. Ze względu na budowę i właściwości
Funkcjonowanie narządu ruchu Kinga Matczak Narząd ruchu zapewnia człowiekowi utrzymanie prawidłowej postawy ciała, dowolne zmiany pozycji i przemieszczanie się w przestrzeni. Ze względu na budowę i właściwości
KARTA INFORMACYJNA DO OGÓLNYCH WARUNKÓW UBEZPIECZENIA NASTĘPSTW NIESZCZĘŚLIWYCH WYPADKÓW KIEROWCY I PASAŻERÓW POJAZDU MECHANICZNEGO (NNW)
") Aneks zmieniający z dniem lutego 07 r. postanowienia ogólnych warunków ubezpieczenia następstw nieszczęśliwych wypadków kierowcy i pasażerów pojazdu mechanicznego (NNW) (wprowadzonych do obrotu z dniem
Aneks zmieniający z dniem lutego 07 r. postanowienia ogólnych warunków ubezpieczenia następstw nieszczęśliwych wypadków kierowcy i pasażerów pojazdu mechanicznego (NNW) (wprowadzonych do obrotu z dniem
PRACA DYPLOMOWA Magisterska
 POLITECHNIKA WARSZAWSKA Wydział Samochodów i Maszyn Roboczych PRACA DYPLOMOWA Magisterska Studia stacjonarne dzienne Semiaktywne tłumienie drgań w wymuszonych kinematycznie układach drgających z uwzględnieniem
POLITECHNIKA WARSZAWSKA Wydział Samochodów i Maszyn Roboczych PRACA DYPLOMOWA Magisterska Studia stacjonarne dzienne Semiaktywne tłumienie drgań w wymuszonych kinematycznie układach drgających z uwzględnieniem
Zaopatrzenie ortopedyczne. dr n. med. R. Santorek 1 ECTS F-1-K-ZO-07 studia
 Nazwa jednostki prowadzącej kierunek: Nazwa kierunku: Poziom kształcenia: Profil kształcenia: Moduły wprowadzające / wymagania wstępne: Nazwa modułu (przedmiot lub grupa przedmiotów): Osoby prowadzące:
Nazwa jednostki prowadzącej kierunek: Nazwa kierunku: Poziom kształcenia: Profil kształcenia: Moduły wprowadzające / wymagania wstępne: Nazwa modułu (przedmiot lub grupa przedmiotów): Osoby prowadzące: