AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 4
|
|
|
- Alina Kuczyńska
- 6 lat temu
- Przeglądów:
Transkrypt

1 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje od: 2014/2015 Stefan Jankowski, Marcin Przywarty, Marta Schoeneich, Mateusz Bilewski, Renata Boć Stefan Jankowski
2 RAMOWY SPIS TREŚCI 1. EFEKTY KSZTAŁCENIA 2. CEL I ZAKRES ĆWICZENIA 3. WARUNKI ZALICZENIA 4. LITERATURA 5. PRZEBIEG ĆWICZENIA 6. FORMULARZE, ZAŁĄCZNIKI
3

4
5
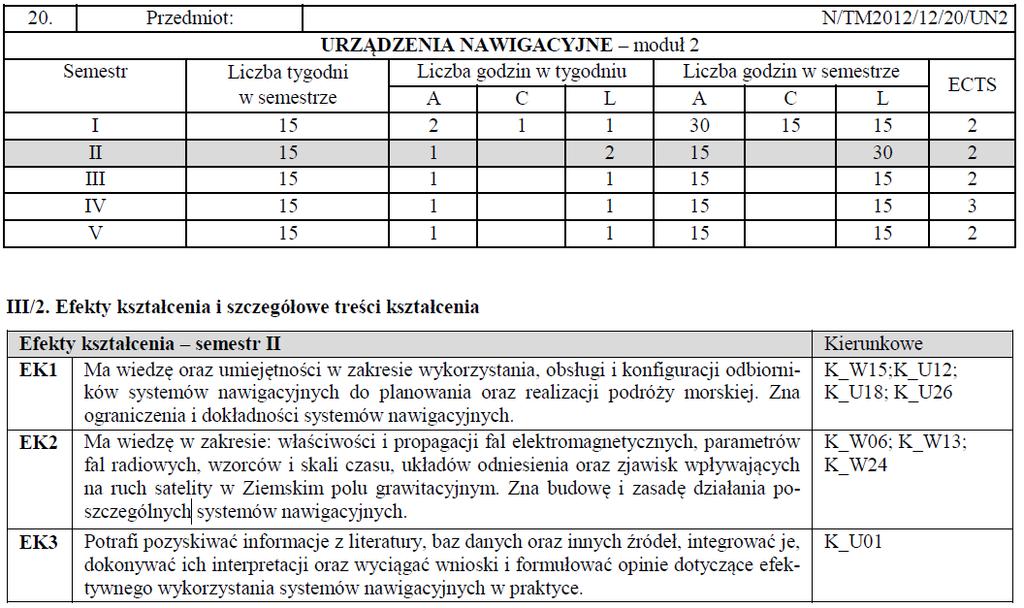
6 Cel: Celem ćwiczenia jest zaznajomienie studentów ze sposobami poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów nawigacyjnych. Zagadnienia teoretyczne: Zasada działania systemu dgps Pojęcia: wektor stanu, poprawka różnicowa, wiek poprawki (AOC), EGNOS, elevation mask Filtracja parametrów wektora stanu Czynniki wpływające na dokładność pozycji w GPS Czynniki wpływające na dokładność pozycji w DGPS Błąd cyklu w Loran C Część wstępna: Część wstępną do ćwiczenia czwartego stanowi uzupełniona karta pomiarowa: Nagłówek w formie tabeli (Imię, Nazwisko, rok, grupa, temat i numer ćwiczenia, data wykonywania ćwiczenia) Cel ćwiczenia Sprawozdanie: Podstawową część sprawozdania stanowi uzupełniona karta pomiarowa z podpisem prowadzącego zajęcia. Sprawozdanie powinno składać się z opracowania wyników z przebytego ćwiczenia, indywidualnych wniosków każdego studenta oraz odpowiedzi na pytania podane przez prowadzącego. SPRAWOZDANIE NALEŻY ODDAĆ NA NASTĘPNYCH ZAJĘCIACH!!!!!! CZAS WYKONANIA ZADAŃ NA POSZCZEGÓLNYCH STANOWISKACH NIE POWINIEN PRZEKROCZYĆ 10 MINUT!!! Literatura: 1. Ackroyd N., Lorimer R., Global navigation - a GPS user s guide, Lloyd s of London Press LTD, London Januszewski J., Systemy satelitarne GPS, Galileo i inne, PWN, Warszawa Januszewski J., Szymoński M., Systemy hiperboliczne w nawigacji morskiej, Wyd. Morskie, Gdańsk Specht, C., System GPS, Biblioteka Nawigacji nr 1, Bernardinum, Pelplin 2007.
7 Stanowisko nr 1 Leica MK 10 DGP 1. Jeżeli odbiornik jest wyłączony należy go włączyć 2. Nacisnąć klawisz CFG, na stronie CFG1 kursorem wybrać zakładkę DGPS. Sprawdzić konfigurację dgps: DGPS mode: On Fast decode: Yes Max age: 30s Message 16 alarm: Yes Alarm for no corrections: Yes Beacon receiver: internal W razie potrzeby zmienić. 3. Nacisnąć klawisz DGPS i przy pomocy kursora wybrać stronę DGPS1. Klawiszem E otworzyć stronę do edycji W opcji Station select przy pomocy kursora ustawić Manual Kursorem wybrać parametr Frequency i przy pomocy klawiatury alfanumerycznej oraz prawego klawisza softkey. wprowadzić częstotliwość stacji. Dane zatwierdzić klawiszem E. Zanotować kolejne informacje wyświetlane w oknie Status: Po uzyskaniu pozycji dgps - Status: DGPS OK - zapisać informacje dotyczące wybranej stacji zgodnie z tabelą Wyjaśnić na podstawie instrukcji do urządzenia str. 74 informacje zwarte w prawym oknie strony DGPS1. 4. Klawiszem GPS przejść do strony GPS1 i zapisać wartości VDOP i HDOP oraz ilość widocznych i używanych satelitów. 5. Nacisnąć klawisz CFG i ustawić: 5.1. COG/SOG filter time na 0.0s zakładka COG SOG 5.2. Elipsoidę odniesienia (Datum) na WGS 84 zakładka Datum 5.3. Elevation mask na 30 - zakładka GPS 5.4. W zakładce Position sprawdzić ustawienie HDOP alarm (yes i 8.0) 6. Wcisnąć klawisz GPS i zanotować ilość widocznych/używanych satelitów oraz HDOP i VDOP. Skomentować ewentualne zmiany wywołane ustawieniami maski wzniesienia. 7. Wcisnąć klawisz CFG i w zakładcegps ustawić wartość elevation mask na 5 8. Nacisnąć klawisz POS i zanotować minimalną i maksymalna wartość prędkości i kursu w okresie 10 sekund. 9. Wcisnąć klawisz CFG i w zakładce COG SOG ustawić filtr na 30s następnie nacisnąć klawisz POS i dokonać 10 sekundowej obserwacji prędkości i kursu. Zanotować minimalne i maksymalne ich wartości. Skomentować ewentualne zmiany wywołane ustawieniami filtra. Tabela 1. Nazwa stacji Częstotliwość Beacon Id Baud rate Distance Noise Signal Dziwnów Hammerodde 289.5

8 Stanowisko nr 2. FX 412 Pro systemu DGPS 1. Jeżeli odbiornik jest wyłączony należy go włączyć 2. Nacisnąć klawisz MENU, a następnie otworzyć podmenu DGPS MENU. Uruchomić funkcję 0-DGPS i nacisnąć klawisz ENTER. Typ odbiornika różnicowego ustawić na INTERN, natomiast tryb pracy odbiornika GPS na AUTO. Wprowadzić jedną z wybranych stacji różnicowych, których dane umieszczono w poniższej tabeli: Nazwa stacji Częstotliwość [khz] Dziwnów Hammerodde Baud SIGNAL LEVEL % ERROR Station Id 3. Uzupełnić tabelę na podstawie danych z odbiornika. Zapisać numery satelitów, dla których poprawki są odbierane. 4. W DGPS MENU wybrać funkcję 1-DGPS MESSAGE. Odczytać i zapisać ostatnią wiadomość (instrukcja do urządzenia str. 44). Potwierdzić wiadomość klawiszem ENTER. 5. W SYSTEM MENU wybrać funkcję 5-DISPLAY. Wybrać opcję ACCURACY i zatwierdzić ją klawiszem ENTER. 6. W NAVIGATION MENU wybrać funkcję 4-SPEED FILTER. Ustawić wartość równą 1 second. Potwierdzić klawiszem ENTER. 7. Nacisnąć klawisz Pos. Dokonać 10 sekundowej obserwacji dokładności, prędkości i kursu. Zapisać minimalne i maksymalne ich wartości. 8. Punkty 5 i 6 powtórzyć dla filtra równego 30 sekund. 9. Wyjaśnić i skomentować wpływ ustawień filtra na zmiany prędkości i kursu oraz ewentualne zmiany w dokładności pozycji (accuracy)
9 Stanowisko nr 3 KODEN KGP-920 Wykonanie ćwiczenia: 1. Jeżeli odbiornik jest wyłączony należy go włączyć. 2. Nacisnąć klawisz MENU, a następnie klawisz z nr 3 (GPS): 2.1. Zapisać dostępne wartości możliwych ustawień maski elewacji (ELV. MASK) oraz wyjaśnić znaczenie tej funkcji na podstawie instrukcji do urządzenia str Następnie wybrać wartość 5 i potwierdzić ENT Przejść do opcji 5:DOP MASK i ustawić jej wartość na 07, po czym zatwierdzić klawiszem ENT. Wyjaśnić użyteczność tej funkcji na podstawie instrukcji do urządzenia str. 8-3, oraz znaczenie alarmów "GPS NO FIX" i "HDOP ERROR" (instrukcja do urządzenia str. 10-3) Nacisnąć kolejno klawisz MENU i MODE, po czym spisać wartość współczynnika DOP z pierwszej strony okna A (NAV1). 3. Poprawianie dokładności wskazań własnej pozycji 3.1. Nacisnąć klawisz MENU, a następnie klawisz z nr 5 (COMP.) Wcisnąć klawisz z nr 1 (LAT/LON) i wprowadzić współrzędne pozycji: φ = N λ = E Miana N i S oraz W i E można zamienić przy pomocy klawiszy z nr 2/N, 8/S, 4/W i 6/E. Po wprowadzeniu pełnej wartości szerokości lub długości geograficznej należy ją potwierdzić klawiszem ENT Wyjaśnić znaczenie funkcji poprawiania dokładności wskazań własnej pozycji (instrukcja do urządzenia str ). 4. Kompensacja wskazań deklinacji 4.1. Nacisnąć klawisz MENU, a następnie klawisz z nr 3 (MAG.V) Zanotować możliwe ustawienia i wybrać opcję AUTO Wyjaśnić znaczenie tej funkcji na podstawie instrukcji str Nacisnąć klawisz MENU, a następnie klawisz z nr 4 (DGPS): 5.1. Spisać i wyjaśnić dostępne sposoby odbierania poprawek różnicowych pozycja 1:DGPS STYLE, a następnie wybrać opcję BEACON i potwierdzić klawiszem ENT Ustawić DGPS MODE na ON oraz TIME OUT na 40s. Wyjaśnić znaczenie opcji TIME OUT na podstawie instrukcji do urządzenia str Strzałkami kursora przejść na drugą stronę (2/2) zakładki DGPS W pozycji STN SEL ustawić opcję MANUAL, po czym wpisać nr 001 i zatwierdzić klawiszem ENT. Wprowadzić częstotliwość, szybkość transmisji danych oraz nazwę stacji referencyjnej według zaleceń Nacisnąć klawisz MENU i MODE. Sprawdzić w jaki sposób prezentowana jest informacja o pracy odbiornika w trybie różnicowym w oknach A (NAV1), B (NAV2), C (NAV3) i D (PLOT). Opisać to w sprawozdaniu korzystając z instrukcji do urządzenia str Nacisnąć klawisz MENU, następnie klawisz z nr 4 (DGPS), po czym ustawić DGPS MODE na AUTO. 7. Nacisnąć klawisz MENU, a następnie MODE. 8. Wyłączyć odbiornik.
10 Stanowisko nr 4. GPSMAP 2010C 1. Jeżeli odbiornik jest wyłączony należy go włączyć 2. Ustawienie pozycji różnicowej 2.1. Nacisnąć klawisz MENU i kursorem wybrać zakładkę GPS Info. Następnie nacisnąć klawisz DGPS Setup (prawy dolny róg ekranu). Spisać możliwości wyboru źródła poprawek różnicowych oraz parametrów ich odbioru. W oknie Differential Source wybrać Auto. Wcisnąć klawisz QUIT. Na podstawie instrukcji do urządzenia str. 48 zinterpretować informacje wyświetlone w oknie Differential Status. 3. Wybrać zakładkę UNITS, ustawić format pozycji na hddd mm.mmm oraz w Map Datum wybrać WGS Przy pomocy klawisza PAGE przejść na stronę z mapą 4.1. Dobrać skalę przy pomocy klawiszy IN, OUT tak, aby widoczna była cała Wyspa Grodzka wraz ze szczegółami (<800ft) Spisać długość i szerokość geograficzną pozycji własnej oraz namiar i odległość na południowy cypel Wyspy Grodzkiej Po zakończeniu ćwiczenia. Nanieść pozycje własne z szerokości i długości geograficznej oraz z namiaru i odległości do wyspy na kserze mapy. Skomentować ewentualne rozbieżności. 5. Powtórzyć powyższe operacje od punktu 3 dla elipsoid EUROPEAN 1950 i TOKYO. 6. Dokładność pozycji 6.1. Ze strony z mapą przejść klawiszem Set Up Map do ustawień mapy (dolne klawisze) W ustawieniach mapy wybrać klawiszem kursora zakładkę Other (ostatnia z prawej) i włączyć Accuracy Circle, wcisnąć PAGE, aby uzyskać stronę z mapą Przy pomocy kursora i klawiszy OUT i IN wyświetlić koło błędu. (okrąg wokół bieżącej pozycji). Zapisać wartość promienia koła błędu zmierzonego przy pomocy narzędzia Measure Nacisnąć klawisz MENU i wybrać zakładkę GPS info, zapisać wartość Accuracy. Wyjaśnić różnicę pomiędzy zapisaną wartością, a zmierzonym promieniem (strona 21 instrukcji). Uwaga mapka na końcu ćwiczenia!!!
11 Stanowisko nr 5. MAGELLAN FX324 MAP COLOR wraz z odbiornikiem CSI MBX-2 systemu DGPS. 1. Jeżeli odbiornik jest wyłączony należy go włączyć 2. Z menu wybrać zakładkę NAV, a następnie pole 7 (Speed filter). Opisać zakres czasowy ustawień filtra prędkości. Ustawić filtr na wartość 15 Seconds. Na podstawie instrukcji (str. 39 ) wyjaśnić cel stosowania filtra. 3. Z menu wybrać zakładkę POS, a następnie pole 4 (Map datum). Spośród dostępnych elipsoid odniesienia wybrać elipsoidę CANAD. Naciskając klawisz funkcyjny Pos odczytać pozycję geograficzną w formacie 3D (φ, λ i wysokość). Wysokość odczytujemy w zakładce POS, w polu numer 5 (2D/3D Mode). Zapisać pozycję. 4. Następnie zmienić elipsoidę odniesienia na WGS 84 i ponownie zapisać pozycję geograficzną 3D. Skomentować różnice we współrzędnych pozycji dla zastosowanych elipsoid. Opisać zasadę doboru elipsoidy odniesienia w odbiorniku GPS.
12 Stanowisko nr 6. FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO GR-80 systemu DGPS 1. Jeżeli odbiornik jest wyłączony należy go włączyć 2. Ustawienie DGPS w odbiorniku GP Z Menu głównego wybrać system settings, a następnie DGPS setup 2.2. Wybrać ręczny sposób wyboru stacji (opcja Man) i ustawić parametry stacji referencyjnej według zaleceń prowadzącego, zatwierdzić klawiszem ENT 2.3. Obserwować odbiornik poprawek różnicowych GR Ustawienia GPS 3.1. Wejść do Menu głównego, uruchomić GPS monitor, wybrać ekran Satellites Monitor (zmiana ekranów klawisz TONE) 3.2. Zapisać numery satelitów z których korzysta odbiornik oraz wartość DOP 3.3. Z Menu Głównego wybrać System settings, następnie wybrać GPS setup strona 1/2, wartości GPS smoothing ustawić na Zablokować odbiór sygnału z 3 satelitów nawigacyjnych (wykorzystywanych przez odbiornik) wpisując ich numery w funkcji disable satellite 3.5. Wrócić na GPS monitor, zapisać liczbę używanych satelitów i wartość DOP 3.6. Zapisać wnioski, dotyczące zmian DOP spowodowanych innym układem geometrycznym satelitów 3.7. Wyczyścić pola z numerami satelitów w funkcji disable satellite za pomocą klawisza Clear 4. Poprawianie wskazań kursu i prędkości 4.1. Wejść do Menu głównego, wybrać System settings następnie Plotter setup 4.2. Ustawić pola User defined na prędkość SPD, kurs CSE, prędkość średnią AVR SPD i wysokość ALT, wyjść klawiszem MENU/ESC 4.3. Nacisnąć klawisz Display SEL i wybrać ekran Data 4.4. Obserwować wskazania prędkości, kursu i wysokości, zanotować minimalną i maksymalna wartość 4.5. Wejść do Menu głównego i w System settings wybrać GPS setup 4.6. Parametr GPS smoothing (Posn i Spd) ustawić na 15s, zatwierdzić klawiszem ENT i przejść do ekranu głównego klawiszem MENU/ESC 4.7. Obserwować zmiany pozycji, prędkości i kursu Zapisać wnioski dotyczące wpływu ustawienia GPS SMOOTHING na wyświetlane parametry (pozycję i prędkość)
13 Stanowisko nr 7. SIMRAD MX Jeżeli odbiornik jest wyłączony należy go włączyć 2. Uruchomić stronę przedstawiającą konstelacje satelitów i odczytać HDOP. W tym celu kliknąć Menu, wybrać zakładkę Tools and Settings, zatwierdzić ENT, Przyciskiem PAGE przejść z zakładki Settings na Tools, wybrać Satellites i zatwierdzić ENT. Zanotować wartość HDOP oraz zapisać ilość satelitów. 3. Zanotować współrzędne pozycji bieżącej, powrócić do strony głównej klikając CLR. 4. Zmienić elipsoidę odniesienia na TOKYO, w tym celu wcisnąć Menu, Tools and Settings, zatwierdzić ENT. Kliknąć na zakładkę Navigation, zatwierdzić ENT. W zakładce Datum zmienić elipsoidę odniesienia na Tokyo- Japan). 5. Odczytać i zapisać współrzędne pozycji. W tym celu kliknąć 2krotnie CLR. Porównać z pozycją zapisaną w pkt. 3. Wyjaśnić zaobserwowane zjawisko (sprawozdanie). 6. Zmienić elipsoidę odniesienia na WGS Ustawianie metod odbierania poprawek różnicowych. Z menu głównego wybrać zakładkę Tools and Settings, zatwierdzić ENT, 7.1. Następnie GPS, zatwierdzić ENT 7.2. Z zakładki DGPS Mode wybrać WAAS, przyciskiem CLR powrócić do Menu, klikając PAGE przejść do zakładki TOOL, wybrać Satellites Sprawdzić i zanotować status DGPS klikając PAGE. Klawiszem CLR wychodzimy do strony głównej Ustawić ponownie DGPS Mode na BEACON, (Menu Tools and Settings GPS) Przyciskiem CLR powrócić do Menu, klikając PAGE przejść do zakładki TOOL, wybrać Satellites Sprawdzić i zanotować status DGPS klikając PAGE 7.7. Ustawić ręczny wybór stacji Selection (Manual) i parametry dla stacji wskazanej przez prowadzącego. 8. Wyłączyć odbiornik.
14
15 Temat: KARTA POMIAROWA Numer ćwiczenia: Nazwisko i imię: Grupa: Data i podpis prowadzącego: Cel ćwiczenia: Stanowisko 1. Stanowisko 2. Stanowisko 3.
16 Stanowisko 4. Stanowisko 5. Stanowisko 6.
17 Stanowisko 7. Pytanie 1: Pytanie 2: Odpowiedzi na pytania:
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 4
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 4
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 3
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 3
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 3
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Prezentacja informacji w odbiornikach systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Prezentacja informacji w odbiornikach systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Metody poprawiania dokładności parametrów wektora stanu wyznaczanych przez odbiorniki systemów
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych LABORATORIUM RADIONAWIGACJI Szczecin
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych LABORATORIUM RADIONAWIGACJI Szczecin
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 2
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Prezentacja informacji w odbiornikach systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Prezentacja informacji w odbiornikach systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych LABORATORIUM RADIONAWIGACJI Szczecin
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Kontrola poprawności pracy odbiorników systemów nawigacyjnych LABORATORIUM RADIONAWIGACJI Szczecin
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 2
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Prezentacja informacji w odbiornikach systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Prezentacja informacji w odbiornikach systemów nawigacyjnych Opracował: Zatwierdził: Obowiązuje
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Prezentacja informacji w odbiornikach systemów nawigacyjnych LABORATORIUM RADIONAWIGACJI Szczecin
AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 2 Prezentacja informacji w odbiornikach systemów nawigacyjnych LABORATORIUM RADIONAWIGACJI Szczecin
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji Opracował: Zatwierdził: Obowiązuje od: 2013/2014
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji Opracował: Zatwierdził: Obowiązuje od: 2013/2014
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 5
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji Opracował: Zatwierdził: Obowiązuje od: 2014/2015
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji Opracował: Zatwierdził: Obowiązuje od: 2014/2015
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji LABORATORIUM RADIONAWIGACJI Szczecin 2011 Cel:
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji LABORATORIUM RADIONAWIGACJI Szczecin 2011 Cel:
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 5
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji Opracował: Zatwierdził: Obowiązuje od: 2016/2017
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji Opracował: Zatwierdził: Obowiązuje od: 2016/2017
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 6
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Badanie dokładności wskazań odbiornika JRC GPS Opracował: Renata Boć Zatwierdził: Stefan Jankowski
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Badanie dokładności wskazań odbiornika JRC GPS Opracował: Renata Boć Zatwierdził: Stefan Jankowski
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 5
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji Opracował: Zatwierdził: Obowiązuje od: 2018 Stefan
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji Opracował: Zatwierdził: Obowiązuje od: 2018 Stefan
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 7 Ocena dokładności wskazań odbiornika GPS MAP 2010C systemu GPS Szczecin 2011 Temat: Ocena dokładności
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 7 Ocena dokładności wskazań odbiornika GPS MAP 2010C systemu GPS Szczecin 2011 Temat: Ocena dokładności
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Ocena dokładności wskazań odbiornika Leica MK10 DGPS Szczecin 2011 Temat: Ocena zmienności
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 6 Ocena dokładności wskazań odbiornika Leica MK10 DGPS Szczecin 2011 Temat: Ocena zmienności
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji LABORATORIUM RADIONAWIGACJI Szczecin 2009 Cel:
AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Programowanie trasy i prowadzenie nawigacji LABORATORIUM RADIONAWIGACJI Szczecin 2009 Cel:
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych Opracował:
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych Opracował:
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 12 Ocena dokładności wskazań odbiornika GPSMAP 230 systemu GPS Szczecin 2006 Ocena dokładności
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 12 Ocena dokładności wskazań odbiornika GPSMAP 230 systemu GPS Szczecin 2006 Ocena dokładności
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 1
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych Opracował:
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych Opracował:
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 7 Ocena dokładności wskazań odbiornika MLR FX 412 Pro systemu DGPS Szczecin 2006 Temat: Ocena
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 7 Ocena dokładności wskazań odbiornika MLR FX 412 Pro systemu DGPS Szczecin 2006 Temat: Ocena
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 1
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych Opracował:
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych Opracował:
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Pomiary radarowe Laboratorium 5 Opracował: Zatwierdził:
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Pomiary radarowe Laboratorium 5 Opracował: Zatwierdził:
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Zniekształcenia i zakłócenia obrazu radarowego Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Zniekształcenia i zakłócenia obrazu radarowego Laboratorium
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Zniekształcenia i zakłócenia obrazu radarowego Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Zniekształcenia i zakłócenia obrazu radarowego Laboratorium
AKADEMIA MORSKA W SZCZECINIE. Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych. Ćwiczenie nr 1
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych Opracował:
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych Opracował:
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Parametry techniczno - eksploatacyjne radarów Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Parametry techniczno - eksploatacyjne radarów Laboratorium
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Zniekształcenia i zakłócenia obrazu radarowego Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Zniekształcenia i zakłócenia obrazu radarowego Laboratorium
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Wpływ elementów regulacyjnych na obraz radarowy Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Wpływ elementów regulacyjnych na obraz radarowy Laboratorium
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 8 Ocena dokładności wskazań odbiornika MAGELLAN FX324 MAP COLOR Szczecin 2011 Temat: Ocena dokładności
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 8 Ocena dokładności wskazań odbiornika MAGELLAN FX324 MAP COLOR Szczecin 2011 Temat: Ocena dokładności
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Wpływ elementów regulacyjnych na obraz radarowy Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Wpływ elementów regulacyjnych na obraz radarowy Laboratorium
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Pomiary radarowe Laboratorium 5 Opracował: Zatwierdził:
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Pomiary radarowe Laboratorium 5 Opracował: Zatwierdził:
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych LABORATORIUM
AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych LABORATORIUM
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych LABORATORIUM
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Procedura uruchomienia i regulacji podstawowej odbiorników systemów nawigacyjnych LABORATORIUM
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Wpływ elementów regulacyjnych na obraz radarowy Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Wpływ elementów regulacyjnych na obraz radarowy Laboratorium
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Zniekształcenia i zakłócenia obrazu radarowego Szczecin 2009 TEMAT: Zniekształcenia i zakłócenia
AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 3 Zniekształcenia i zakłócenia obrazu radarowego Szczecin 2009 TEMAT: Zniekształcenia i zakłócenia
ODORYMETRIA. Joanna Kośmider. Ćwiczenia laboratoryjne i obliczenia. Część I ĆWICZENIA LABORATORYJNE. Ćwiczenie 1 POMIARY EMISJI ODORANTÓW
 Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Wyposażenie Samolotu
 P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
AKADEMIA MORSKA W SZCZECINIE
 K SINSTYTUTINśYNIERII RUCHUMOR IEGO AKADEMIA MORSKA W SZCZECINIE AMSZCZECIN Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Wpływ elementów regulacyjnych na obraz radarowy.
K SINSTYTUTINśYNIERII RUCHUMOR IEGO AKADEMIA MORSKA W SZCZECINIE AMSZCZECIN Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 1 Wpływ elementów regulacyjnych na obraz radarowy.
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 10 Ocena dokładności wskazań odbiornika MLR LRX 22 P systemu LORAN-C Szczecin 2006 Temat: Ocena
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 10 Ocena dokładności wskazań odbiornika MLR LRX 22 P systemu LORAN-C Szczecin 2006 Temat: Ocena
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Pomiary radarowe. Szczecin 2007 TEMAT: Pomiary radarowe. 1. Cel ćwiczenia: Celem ćwiczenia
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Pomiary radarowe. Szczecin 2007 TEMAT: Pomiary radarowe. 1. Cel ćwiczenia: Celem ćwiczenia
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Budowa i zasada eksploatacji echosond nawigacyjnych Echosonda Skipper GDS 101 Szczecin 2006
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 4 Budowa i zasada eksploatacji echosond nawigacyjnych Echosonda Skipper GDS 101 Szczecin 2006
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 A Budowa i zasada eksploatacji echosond nawigacyjnych Echosonda Lowrance LCX 19c Szczecin 2006
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 A Budowa i zasada eksploatacji echosond nawigacyjnych Echosonda Lowrance LCX 19c Szczecin 2006
MultiBoot Instrukcja obsługi
 MultiBoot Instrukcja obsługi Copyright 2009 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
MultiBoot Instrukcja obsługi Copyright 2009 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Pomiary radarowe Laboratorium 5 Opracował: Zatwierdził:
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Pomiary radarowe Laboratorium 5 Opracował: Zatwierdził:
Konfiguracja pomiaru temperatury oraz alarmu poprzez wyjścia cyfrowe w przypadku przekroczenia zadanej temperatury
 Konfiguracja pomiaru temperatury oraz alarmu poprzez wyjścia cyfrowe w przypadku przekroczenia zadanej temperatury 1. Logujemy się do kamery poprzez interfejs Web. Domyślny adres IP: 192.168.250.116 User
Konfiguracja pomiaru temperatury oraz alarmu poprzez wyjścia cyfrowe w przypadku przekroczenia zadanej temperatury 1. Logujemy się do kamery poprzez interfejs Web. Domyślny adres IP: 192.168.250.116 User
Higrometr Testo 623, %RH, -10 do +60 C
 INSTRUKCJA OBSŁUGI Higrometr Testo 623, 0 100 %RH, -10 do +60 C Nr produktu 101136 Strona 1 z 9 1 Opis produktu 1.1. Przegląd 1. Klawiatura Klawisz Funkcja Wyświetl wartość maks. Wyświetl wartość min.
INSTRUKCJA OBSŁUGI Higrometr Testo 623, 0 100 %RH, -10 do +60 C Nr produktu 101136 Strona 1 z 9 1 Opis produktu 1.1. Przegląd 1. Klawiatura Klawisz Funkcja Wyświetl wartość maks. Wyświetl wartość min.
PAP-2T w sieci FreePhone
 konfiguracja bramki w sieci FreePhone I. Za pomocą klawiatury telefonu korzystając z instrukcji głosowych IVR Dostęp do Menu IVR Użyj telefonu podłączonego do portu PHONE 1 albo PHONE 2 adaptera Wybierz
konfiguracja bramki w sieci FreePhone I. Za pomocą klawiatury telefonu korzystając z instrukcji głosowych IVR Dostęp do Menu IVR Użyj telefonu podłączonego do portu PHONE 1 albo PHONE 2 adaptera Wybierz
! Kursor wskazuje spadek poziomu napięcia w akumulatorze i usterki sygnalizatora
 A) PILOT numer sygnalizatorta rodzaj połączenia radio R kabel C kwarc Q sygnalizatory kursor stan naładowania akumulatora F Progr. 1 4s czas sygnału! Kursor wskazuje spadek poziomu napięcia w akumulatorze
A) PILOT numer sygnalizatorta rodzaj połączenia radio R kabel C kwarc Q sygnalizatory kursor stan naładowania akumulatora F Progr. 1 4s czas sygnału! Kursor wskazuje spadek poziomu napięcia w akumulatorze
1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14. 1.2 Ustawienia wprowadzające. Auto CAD 14 1-1. Aby uruchomić AutoCada 14 kliknij ikonę
 Auto CAD 14 1-1 1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14 Aby uruchomić AutoCada 14 kliknij ikonę AutoCAD-a 14 można uruchomić również z menu Start Start Programy Autodesk Mechanical 3 AutoCAD R14
Auto CAD 14 1-1 1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14 Aby uruchomić AutoCada 14 kliknij ikonę AutoCAD-a 14 można uruchomić również z menu Start Start Programy Autodesk Mechanical 3 AutoCAD R14
Instrukcja użytkownika systemu S4
 Instrukcja użytkownika systemu S4 12.02.2013 SPIS TREŚCI Spis treści... 1 1. Rozwiązywanie problemów z uruchomieniem systemu... 2 2. Wybór programu kształcenia... 3 3. Praca z programem kształcenia...
Instrukcja użytkownika systemu S4 12.02.2013 SPIS TREŚCI Spis treści... 1 1. Rozwiązywanie problemów z uruchomieniem systemu... 2 2. Wybór programu kształcenia... 3 3. Praca z programem kształcenia...
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Parametry techniczno - eksploatacyjne radarów Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Parametry techniczno - eksploatacyjne radarów Laboratorium
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Wpływ elementów regulacyjnych na obraz radarowy Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Wpływ elementów regulacyjnych na obraz radarowy Laboratorium
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Identyfikacja ech Laboratorium 4 Opracował: Zatwierdził:
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Identyfikacja ech Laboratorium 4 Opracował: Zatwierdził:
AgriBus-GMini Poradnik użytkownika - RTK -
 AgriBus-GMini Poradnik użytkownika - RTK - Ver. 1.0.2 Zawartość RTK 2 Krajowe Biuro Norm 3 Stacja mobilna 8 QA 14 1 RTK Procedury wykonywania pozycjonowania opartego na RTK za pomocą AgriBus-GMini (zwanego
AgriBus-GMini Poradnik użytkownika - RTK - Ver. 1.0.2 Zawartość RTK 2 Krajowe Biuro Norm 3 Stacja mobilna 8 QA 14 1 RTK Procedury wykonywania pozycjonowania opartego na RTK za pomocą AgriBus-GMini (zwanego
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1
 w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1") Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie
MultiBoot Instrukcja obsługi
 MultiBoot Instrukcja obsługi Copyright 2008 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
MultiBoot Instrukcja obsługi Copyright 2008 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
INSTRUKCJA OBSŁUGI DT-3610B / DT-3630
 INSTRUKCJA OBSŁUGI MIERNIKI temperatury DT-3610B / DT-3630 Wydanie LS 13/07 Proszę przeczytać instrukcję przed włączeniem urządzenia. Instrukcja zawiera informacje dotyczące bezpieczeństwa i prawidłowej
INSTRUKCJA OBSŁUGI MIERNIKI temperatury DT-3610B / DT-3630 Wydanie LS 13/07 Proszę przeczytać instrukcję przed włączeniem urządzenia. Instrukcja zawiera informacje dotyczące bezpieczeństwa i prawidłowej
Pełna instrukcja obsługi sterownika Jazz R20-31 w szafce dla przepompowni ścieków PT-1A.
 Pełna instrukcja obsługi sterownika Jazz R20-31 w szafce dla przepompowni ścieków PT-1A. Przedsiębiorstwo Produkcyjno-Usługowe "E L E K T R O N". ul. Dolina Zielona 46 a 65-154 Zielona Góra Tel/fax.: (
Pełna instrukcja obsługi sterownika Jazz R20-31 w szafce dla przepompowni ścieków PT-1A. Przedsiębiorstwo Produkcyjno-Usługowe "E L E K T R O N". ul. Dolina Zielona 46 a 65-154 Zielona Góra Tel/fax.: (
I. UAKTUALNIANIE MAP
 I. UAKTUALNIANIE MAP Ćwiczenie:60 minut, Demonstracja: 15 minut. Cel ćwiczenia: Stosowanie poprawek i ocena ich wartości. Postać poprawek do map elektronicznych zależy od typu mapy, której dotyczą. Inaczej
I. UAKTUALNIANIE MAP Ćwiczenie:60 minut, Demonstracja: 15 minut. Cel ćwiczenia: Stosowanie poprawek i ocena ich wartości. Postać poprawek do map elektronicznych zależy od typu mapy, której dotyczą. Inaczej
Zehnder Subway. Instrukcja montażu
 Zehnder Subway Instrukcja montażu zehn d r e L A H TEFLO ø 8mm ~m OK OK 40 X 50 G / H 608 84 040 H L 540 450 756 450 40 40 97 450 40 min. 50mm OK F T E L O 3 4 5 L 6 3 x H min. 50 mm 34 H 3 4 7 8 ø 8mm
Zehnder Subway Instrukcja montażu zehn d r e L A H TEFLO ø 8mm ~m OK OK 40 X 50 G / H 608 84 040 H L 540 450 756 450 40 40 97 450 40 min. 50mm OK F T E L O 3 4 5 L 6 3 x H min. 50 mm 34 H 3 4 7 8 ø 8mm
INSTRUKCJA OBSŁUGI PTZ-CVI P-X18 PTZ-CVI P-X18
 INSTRUKCJA OBSŁUGI PTZ-CVI120-1080P-X18 PTZ-CVI60-1080P-X18 1 Spis treści 1. Informacje ogólne: str.3 1.1 O produkcie str.3 1.2 Opis złączy str.3 2. Podłączanie: str.3 3. Menu OSD str.4 3.1 Główne menu
INSTRUKCJA OBSŁUGI PTZ-CVI120-1080P-X18 PTZ-CVI60-1080P-X18 1 Spis treści 1. Informacje ogólne: str.3 1.1 O produkcie str.3 1.2 Opis złączy str.3 2. Podłączanie: str.3 3. Menu OSD str.4 3.1 Główne menu
SPIS TREŚCI Specyfikacja ogólna Ekran startowy Przyciski nawigacji 1. Ustawienia regulacji 1.1 Regulacja cos 1.2 Regulacja przekładni transformatora
 1 SPIS TREŚCI Specyfikacja ogólna Ekran startowy Przyciski nawigacji 1. Ustawienia regulacji 1.1 Regulacja cos 1.2 Regulacja przekładni transformatora 1.3 Regulacja opóźnienia przekładnika napięciowego
1 SPIS TREŚCI Specyfikacja ogólna Ekran startowy Przyciski nawigacji 1. Ustawienia regulacji 1.1 Regulacja cos 1.2 Regulacja przekładni transformatora 1.3 Regulacja opóźnienia przekładnika napięciowego
GPS NAVIGATION SYSTEM QUICK START USER MANUAL
 GPS NAVIGATION SYSTEM QUICK START USER MANUAL POLISH Rozpoczynanie pracy Gdy uruchamiasz program nawigacyjny po raz pierwszy, zostanie automatycznie uruchomiony początkowy proces konfiguracji. Wykonaj
GPS NAVIGATION SYSTEM QUICK START USER MANUAL POLISH Rozpoczynanie pracy Gdy uruchamiasz program nawigacyjny po raz pierwszy, zostanie automatycznie uruchomiony początkowy proces konfiguracji. Wykonaj
MultiBoot Instrukcja obsługi
 MultiBoot Instrukcja obsługi Copyright 2006, 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji
MultiBoot Instrukcja obsługi Copyright 2006, 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji
1. Aplikacja LOGO! App do LOGO! 8 i LOGO! 7
 1. Aplikacja do LOGO! 8 i LOGO! 7 1.1. Przegląd funkcji Darmowa aplikacja umożliwia podgląd wartości parametrów procesowych modułu podstawowego LOGO! 8 i LOGO! 7 za pomocą smartfona lub tabletu przez sieć
1. Aplikacja do LOGO! 8 i LOGO! 7 1.1. Przegląd funkcji Darmowa aplikacja umożliwia podgląd wartości parametrów procesowych modułu podstawowego LOGO! 8 i LOGO! 7 za pomocą smartfona lub tabletu przez sieć
OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105
 OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105 Parametry pracy nadajnika TA105 są ustawiane programowo przy pomocy komputera osobistego przez osoby uprawnione przez operatora, które znają kod dostępu (PIN).
OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105 Parametry pracy nadajnika TA105 są ustawiane programowo przy pomocy komputera osobistego przez osoby uprawnione przez operatora, które znają kod dostępu (PIN).
Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows 7
 5.0 10.2.1.7 Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows 7 Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz badać, jak zabezpieczyć konta, dane i komputer
5.0 10.2.1.7 Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows 7 Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz badać, jak zabezpieczyć konta, dane i komputer
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 B Budowa i zasada eksploatacji echosond nawigacyjnych Echosonda GPSMAP 235 SOUNDER Szczecin
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 B Budowa i zasada eksploatacji echosond nawigacyjnych Echosonda GPSMAP 235 SOUNDER Szczecin
Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows XP
 5.0 10.2.1.9 Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows XP Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz badać, jak zabezpieczyć konta, dane i komputer
5.0 10.2.1.9 Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows XP Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz badać, jak zabezpieczyć konta, dane i komputer
Notowania Mobilne wersja Java dotykowa. Instrukcja obsługi programu
 Notowania Mobilne wersja Java dotykowa Instrukcja obsługi programu Notowania Mobilne to aplikacja, która pozwala na dostęp do notowań giełdowych w czasie rzeczywistym z każdego miejsca na świecie, gdzie
Notowania Mobilne wersja Java dotykowa Instrukcja obsługi programu Notowania Mobilne to aplikacja, która pozwala na dostęp do notowań giełdowych w czasie rzeczywistym z każdego miejsca na świecie, gdzie
Edytor tekstu OpenOffice Writer Podstawy
 Edytor tekstu OpenOffice Writer Podstawy OpenOffice to darmowy zaawansowany pakiet biurowy, w skład którego wchodzą następujące programy: edytor tekstu Writer, arkusz kalkulacyjny Calc, program do tworzenia
Edytor tekstu OpenOffice Writer Podstawy OpenOffice to darmowy zaawansowany pakiet biurowy, w skład którego wchodzą następujące programy: edytor tekstu Writer, arkusz kalkulacyjny Calc, program do tworzenia
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Pomiary radarowe. Szczecin 2007 TEMAT: Pomiary radarowe. 1. Cel ćwiczenia: Celem ćwiczenia
AKADEMIA MORSKA W SZCZECINIE Instytut InŜynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 5 Pomiary radarowe. Szczecin 2007 TEMAT: Pomiary radarowe. 1. Cel ćwiczenia: Celem ćwiczenia
Część I. Pomiar drgań własnych pomieszczenia
 LABORATORIUM INśYNIERII DŹWIĘKU 2 ĆWICZENIE NR 10 Część I. Pomiar drgań własnych pomieszczenia I. Układ pomiarowy II. Zadania do wykonania 1. Obliczyć promień krytyczny pomieszczenia, przy załoŝeniu, Ŝe
LABORATORIUM INśYNIERII DŹWIĘKU 2 ĆWICZENIE NR 10 Część I. Pomiar drgań własnych pomieszczenia I. Układ pomiarowy II. Zadania do wykonania 1. Obliczyć promień krytyczny pomieszczenia, przy załoŝeniu, Ŝe
Pomoc do programu konfiguracyjnego RFID-CS27-Reader User Guide of setup software RFID-CS27-Reader
 2017-01-24 Pomoc do programu konfiguracyjnego RFID-CS27-Reader User Guide of setup software RFID-CS27-Reader Program CS27 Reader należy uruchomić przez wybór opcji CS27 i naciśnięcie przycisku START. Programme
2017-01-24 Pomoc do programu konfiguracyjnego RFID-CS27-Reader User Guide of setup software RFID-CS27-Reader Program CS27 Reader należy uruchomić przez wybór opcji CS27 i naciśnięcie przycisku START. Programme
Obserwacje w Agrinavia MOBILE OGÓLNE INFORMACJE
 OGÓLNE INFORMACJE Rejestrowanie GPS w terenie pozwala na określenie położenia punktów z możliwością załączenia zdjęcia w danym punkcie. Punkty zamieszczone na mapie nazywamy obserwacjami. Mogą one zostać
OGÓLNE INFORMACJE Rejestrowanie GPS w terenie pozwala na określenie położenia punktów z możliwością załączenia zdjęcia w danym punkcie. Punkty zamieszczone na mapie nazywamy obserwacjami. Mogą one zostać
Obrabiarki CNC. Nr 10
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Obrabiarki CNC Nr 10 Obróbka na tokarce CNC CT210 ze sterowaniem Sinumerik 840D Opracował: Dr inż. Wojciech Ptaszyński Poznań, 17 maja,
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Obrabiarki CNC Nr 10 Obróbka na tokarce CNC CT210 ze sterowaniem Sinumerik 840D Opracował: Dr inż. Wojciech Ptaszyński Poznań, 17 maja,
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Parametry techniczno - eksploatacyjne radarów Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Parametry techniczno - eksploatacyjne radarów Laboratorium
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1
 w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1") Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie się systemu.
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie się systemu.
1. Wstęp Niniejszy dokument jest instrukcją użytkownika dla aplikacji internetowej DM TrackMan.
 Instrukcja korzystania z aplikacji TrackMan wersja WEB 1. Wstęp... 1 2. Logowanie... 1 3. Główny interfejs aplikacji... 2 3.1. Ogólny opis interfejsu... 2 3.2. Poruszanie się po mapie... 2 3.3. Przełączanie
Instrukcja korzystania z aplikacji TrackMan wersja WEB 1. Wstęp... 1 2. Logowanie... 1 3. Główny interfejs aplikacji... 2 3.1. Ogólny opis interfejsu... 2 3.2. Poruszanie się po mapie... 2 3.3. Przełączanie
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Parametry techniczno - eksploatacyjne radarów Laboratorium
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Parametry techniczno - eksploatacyjne radarów Laboratorium
AKADEMIA MORSKA W SZCZECINIE. JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych
 AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Identyfikacja ech Laboratorium 4 Opracował: Zatwierdził:
AKADEMIA MORSKA W SZCZECINIE JEDNOSTKA ORGANIZACYJNA: Wydział nawigacyjny Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych INSTRUKCJA Identyfikacja ech Laboratorium 4 Opracował: Zatwierdził:
Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows Vista
 5.0 10.2.1.8 Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows Vista Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz badać, jak zabezpieczyć konta, dane i komputer
5.0 10.2.1.8 Laboratorium - Zabezpieczanie kont, danych i komputera w systemie Windows Vista Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz badać, jak zabezpieczyć konta, dane i komputer
MultiBoot Instrukcja obsługi
 MultiBoot Instrukcja obsługi Copyright 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
MultiBoot Instrukcja obsługi Copyright 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
KS-NaviCon. Podręcznik użytkownika. Zamawianie z oferty w systemie KS-AOW. Katowice, Data aktualizacji: / 9
 Podręcznik użytkownika KS-NaviCon Podręcznik użytkownika Zamawianie z oferty w systemie KS-AOW Katowice, 2017 Data aktualizacji: 27.09.2017 1 / 9 Zamówienie na podstawie oferty Zamówienia są tworzone na
Podręcznik użytkownika KS-NaviCon Podręcznik użytkownika Zamawianie z oferty w systemie KS-AOW Katowice, 2017 Data aktualizacji: 27.09.2017 1 / 9 Zamówienie na podstawie oferty Zamówienia są tworzone na
Instrukcja użytkownika SID Dziekanat: Dane o niepełnosprawnych.
 Instrukcja użytkownika SID Dziekanat: Dane o niepełnosprawnych. System ZSID Dziekanat umożliwia dodanie osobie informacji o jego niepełnosprawności. Spis treści : 1.) Dodawanie informacji o niepełnosprawności
Instrukcja użytkownika SID Dziekanat: Dane o niepełnosprawnych. System ZSID Dziekanat umożliwia dodanie osobie informacji o jego niepełnosprawności. Spis treści : 1.) Dodawanie informacji o niepełnosprawności
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
Arkusz kalkulacyjny EXCEL
 ARKUSZ KALKULACYJNY EXCEL 1 Arkusz kalkulacyjny EXCEL Aby obrysować tabelę krawędziami należy: 1. Zaznaczyć komórki, które chcemy obrysować. 2. Kursor myszy ustawić na menu FORMAT i raz kliknąć lewym klawiszem
ARKUSZ KALKULACYJNY EXCEL 1 Arkusz kalkulacyjny EXCEL Aby obrysować tabelę krawędziami należy: 1. Zaznaczyć komórki, które chcemy obrysować. 2. Kursor myszy ustawić na menu FORMAT i raz kliknąć lewym klawiszem
Instrukcja konfiguracji urządzenia TL-WA830RE v.2
 Instrukcja konfiguracji urządzenia TL-WA830RE v.2 Przygotowanie urządzenia: Krok 1 Włączyć i zresetować wzmacniacz sygnału TL-WA830RE do ustawień fabrycznych naciskając i przytrzymując przycisk RESET,
Instrukcja konfiguracji urządzenia TL-WA830RE v.2 Przygotowanie urządzenia: Krok 1 Włączyć i zresetować wzmacniacz sygnału TL-WA830RE do ustawień fabrycznych naciskając i przytrzymując przycisk RESET,
INSTRUKCJA INSTALACJI SPN-IR INSTRUKCJA INSTALACJI I OBSŁUGI. Sterownik Pracy Naprzemiennej SPN-IR
 INSTRUKCJA INSTALACJI SPN-IR INSTRUKCJA INSTALACJI I OBSŁUGI Sterownik Pracy Naprzemiennej SPN-IR OBSŁUGA URZĄDZENIA W celu konfiguracji sterownika należy postępować zgodnie z poniższą instrukcją. Po podłączeniu
INSTRUKCJA INSTALACJI SPN-IR INSTRUKCJA INSTALACJI I OBSŁUGI Sterownik Pracy Naprzemiennej SPN-IR OBSŁUGA URZĄDZENIA W celu konfiguracji sterownika należy postępować zgodnie z poniższą instrukcją. Po podłączeniu