SILNIKI ASYNCHRONICZNE (INDUKCYJNE) KLATKOWE I PIERŚCIENIOWE
|
|
|
- Martyna Brzozowska
- 9 lat temu
- Przeglądów:
Transkrypt


1 SILNIKI ASYNCHRONICZNE (INDUKCYJNE) KLATKOWE I PIERŚCIENIOWE

2 RODZAJE PÓL MAGNETYCZNYCH Rodzaje pola magnetycznego: 1. Stałe pole magnetyczne (wektor indukcji stały w czasie i przestrzeni) 2. Zmienne pole magnetyczne pulsujące (oscylacyjne) - zmienne w czasie lecz stałe w przestrzeni, wirujące -stałe w czasie lecz zmienne w przestrzeni Sposoby wytwarzania pola wirującego: Sposoby wytwarzania pola wirującego: wirujący magnes, uzwojenie trójpasmowe (trójfazowe) rozmieszczone w przestrzeni co 120 elektrycznych i zasilane napięciem trójfazowym, uzwojenie dwupasmowe (prostopadłe) zasilane napięciami ortogonalnymi (przesuniętymi w fazie o 90 ).
 zasilane napięciami ortogonalnymi")
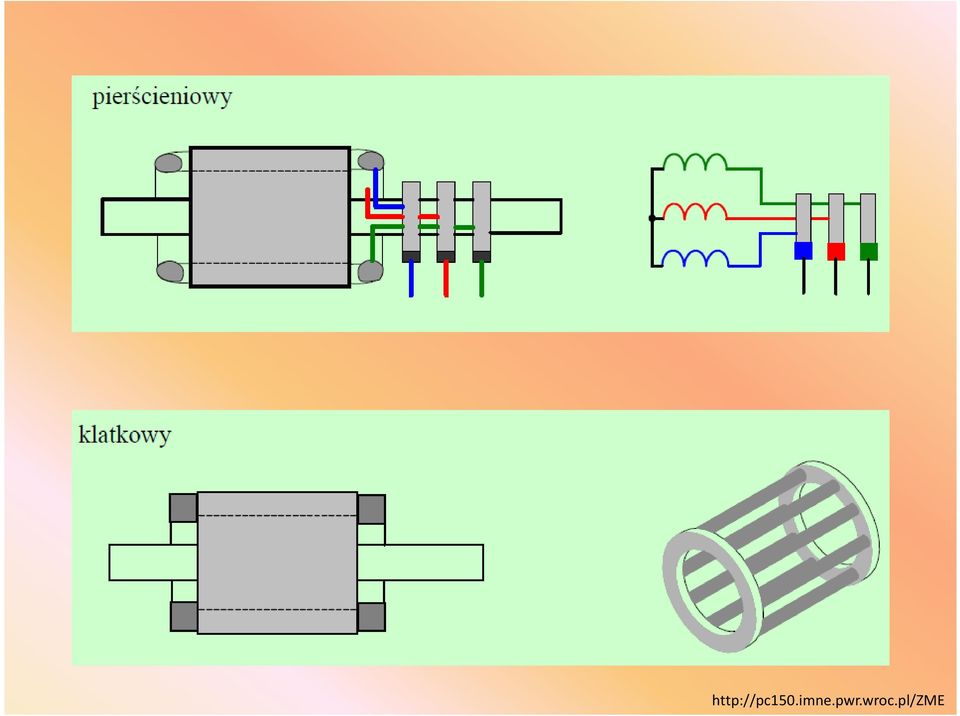
3 MASZYNY INDUKCYJNE Maszyny indukcyjne są maszynami odwracalnymi: praca prądnicowa praca silnikowa W praktyce maszyny asynchroniczne stosowane są jako silniki. Podział silników indukcyjnych ze względu na rodzaj wirnika: klatkowe pierścieniowe


4
5 Budowa maszyn indukcyjnych Silnik asynchroniczny (indukcyjny) to najbardziej popularny silnik, o najszerszych zastosowaniach ze wszystkich rodzajów silników elektrycznych, wykorzystywany szczególnie w przemyśle, ale również i w sprzęcie domowym. Charakteryzuje się bardzo prostą, i łatwą w utrzymaniu konstrukcją. Moce budowanych obecnie silników asynchronicznych obejmują zakres od ułamków kilowatów do kilku megawatów. Silnik indukcyjny składa się z dwóch zasadniczych części: nieruchomego stojana i ruchomego(wirującego) wirnika.

6 Przekrój silnika indukcyjnego
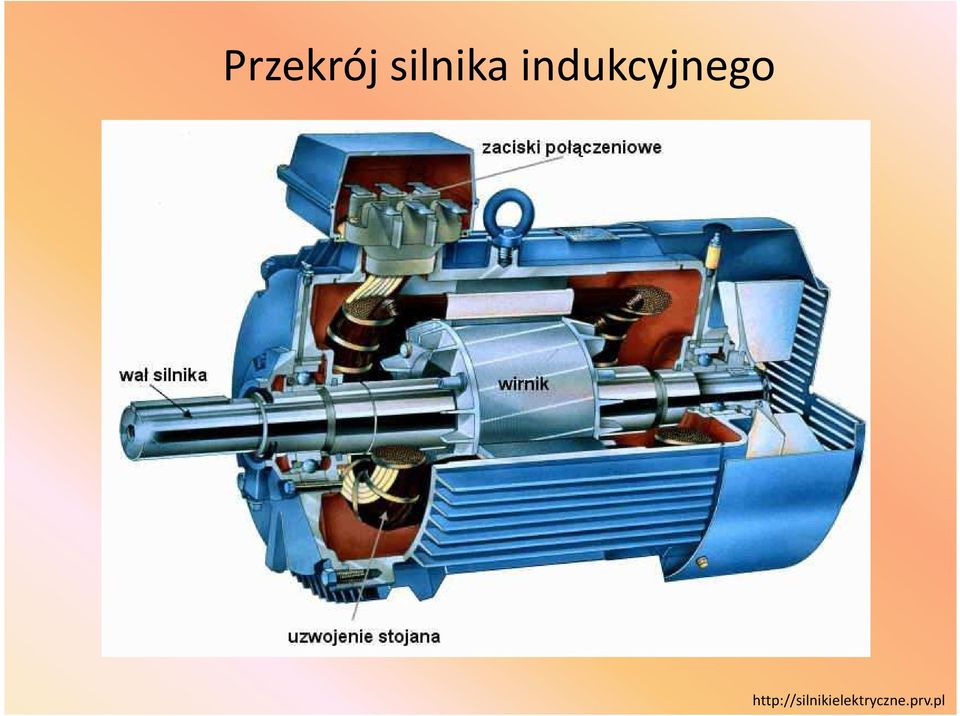
7 Na wewnętrznej stronie rdzenia stojana i zewnętrznej stronie rdzenia wirnika wykonuje się specjalne rowki, zwane żłobkami, w których umieszczane są uzwojenia. Część rdzenia pomiędzy sąsiednimi rowkami, nazywana jest zębem. Żłobki i zęby mogą posiadać różne kształty, zwykle ich liczba w stojanie i wirniku jest różna. Pomiędzy stojanem a wirnikiem znajduje się możliwie mała szczelina powietrzna. Uzwojenie stojana wykonane jest z izolowanego drutu, zaimpregnowane i mocno usztywnione, tak, aby zmniejszyć prawdopodobieństwo uszkodzenia na skutek drgań mechanicznych. Ze względu na sposób wykonania wirnika rozróżnia się dwa rodzaje silników indukcyjnych: klatkowe i pierścieniowe.

8 Budowa silnika indukcyjnego pierścieniowego W silniku pierścieniowym uzwojenie wirnika wykonane jest podobnie do uzwojenia stojana. Jest ono na stałe połączone z pierścieniami ślizgowymi (stąd nazwa silnik pierścieniowy ), zwykle trzema, gdyż uzwojenie wirnika najczęściej jest 3-fazowe. Za pośrednictwem przylegających do pierścieni szczotek, uzwojenia wirnika połączone są z dodatkowymi elementami, zwiększającymi rezystancje każdej fazy. (zmianę rezystancji faz stosuje się dla rozruchu, hamowania i zmiany prędkości silnika). Obecnie ze względu na zbyt skomplikowana budowę konstrukcja ta jest raczej rzadko stosowana. wirnik silnika pierścieniowego
.")
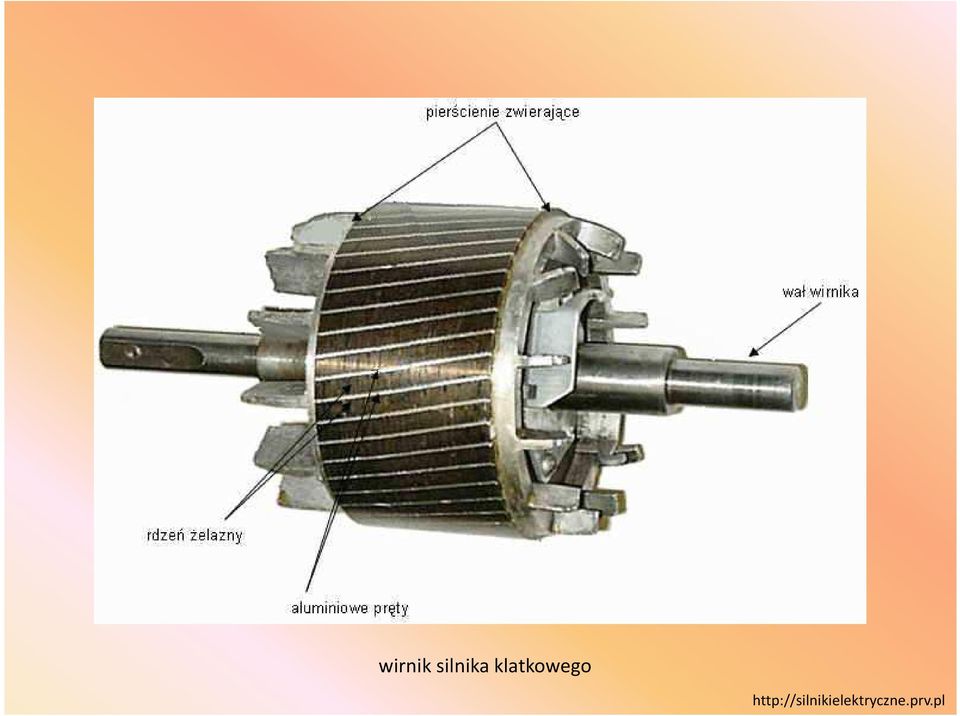
9 Budowa silnika indukcyjnego klatkowego W silniku indukcyjnym klatkowym obwód elektryczny wirnika jest wykonany z nieizolowanych prętów, połączonych po obu stronach wirnika pierścieniami zwierającymi. Konstrukcja to wyglądem przypomina klatkę o kształcie walca (stąd wzięła się nazwa tego silnika). Obwód magnetyczny wirnika wykonany jest w postaci pakietu blach stalowych z dodatkiem krzemu, wzajemne odizolowanych, złożonych jedna na drugą. Obwód elektryczny wirnika jest zawsze zwarty (inna nazwa tego silnika to silnik indukcyjny zwarty) w związku, z czym nie ma możliwości przyłączania dodatkowych elementów, tak jak ma to miejsce w wirniku silnika pierścieniowego. Klatka stanowi wielofazowe uzwojenie wirnika, a za liczbę faz przyjmuje się liczbę prętów, z których jest wykonana.
 w związku, z czym nie ma możliwości przyłączania dodatkowych elementów, tak jak ma to miejsce w")
10 wirnik silnika klatkowego
11 Silnik klatkowy ma bardzo prostą, tanią, i łatwa w utrzymaniu konstrukcję. Wykonanie silnika pierścieniowego jest o wiele droższe, ale konstrukcja ta, poprzez możliwość dołączania dodatkowych elementów do uzwojenia wirnika posiada zdecydowanie bogatsze właściwości ruchowe.(układy umożliwiające rozruch i regulacje prędkości silnika) Biorąc jednak pod uwagę coraz większą powszechność elektronicznych urządzeń zasilających (falowniki, softstarty), umożliwiających uzyskanie o wiele lepszych właściwości regulacyjnych, wspomniane zalety silników pierścieniowych przestały być juz tak istotne i w ogromnej większości silniki pierścieniowe zostały wyparte przez silniki klatkowe.
 Biorąc jednak pod uwagę coraz większą powszechność elektronicznych urządzeń zasilających (falowniki,")
12 Zasada działania silnika asynchronicznego Wytworzone przez uzwojenia stojana wirujące pole magnetyczne obraca się wokół nieruchomego wirnika. W wyniku przecinania przez to pole prętów klatki wirnika, indukuje się w nich napięcie (stąd nazwa silnik indukcyjny ) i zaczyna płynąć w nich prąd.(patrz zjawisko indukcji elektromagnetycznej). Przepływ prądu w polu magnetycznym powoduje powstanie siły elektrodynamicznej (patrz zjawisko powstawania siły elektrodynamicznej) działającej stycznie do obwodu wirnika, a zatem powstaje także moment elektromagnetyczny. Jeżeli wartość tego momentu jest większa od wartości momentu obciążenia, to wirnik rusza i zaczyna zwiększać swoja prędkość obrotową. Zwiększanie prędkości wirnika, powoduje że pręty jego klatki przecinane są przez pole magnetyczne z coraz mniejszą prędkością, co skutkuje zmniejszeniem wartości indukowanej siły elektromotorycznej i spadkiem wartość prądu płynącego w prętach klatki, a zatem spada również wartość momentu elektromagnetycznego.

13 Jeżeli moment ten spadnie do wartości równej momentowi obciążenia, wirnik przestanie przyspieszać i dalej będzie poruszał się ze stałą prędkością. Gdyby nie było żadnego momentu oporowego, wirnik osiągnąłby prędkość równą wartości prędkości wirowania pola, a więc prędkości synchronicznej. W takim przypadku pole wirnika byłoby nieruchome względem pola stojana, a więc ustałoby przecinanie prętów klatki przez pole stojana i nie płynęłyby w nich prądy, nie powstałby moment elektromagnetyczny. Sytuacja taka nie jest jednak możliwa do wystąpienia w rzeczywistym silniku, ponieważ zawsze występuje jakiś moment obciążenia, chociażby moment tarcia w łożyskach czy oporów powietrza (chyba że wirnik będzie napędzany mechanicznie przez jakiś inny silnik). Zatem wirnik osiągnie taką prędkość (zwykle niewiele mniejsza od prędkości synchronicznej), przy której momenty elektromagnetyczny silnika i obciążenia będą miały tą samą wartość. Skoro nie jest to prędkość synchroniczna, musi to być prędkość asynchroniczna, której silnik indukcyjny zawdzięcza swoja druga nazwę - silnika asynchronicznego.

14 Wirnik obraca się z mniejszą prędkością niż stojan. Wartość tej prędkości jest uzależniona od momentu obciążenia - przy większym momencie oporowym wirnik obraca się wolniej, przyspiesza, jeżeli go zmniejszamy. A więc w skoro prędkości wirnika i stojana są różne, oznacza to, że stojan, a w rzeczywistości pole wirujące wytwarzane przez stojan, obraca się z pewną prędkością względem wirnika. Prędkość tą nazywa się poślizgiem i wyraża się wzorem: lub w % n 1 -prędkość wirowania pola wytworzonego przez stojan n - prędkość wirowania wirnika

15 Moment elektromagnetyczny Często w praktycznych zastosowaniach silnika istnieje potrzeba szybkiego wyznaczenia wartości momentu elektromagnetycznego, jaki jest on w stanie osiągnąć. Tabliczka znamionowa silnika zwykle nie podaje jego wartości, ale podaje za to inne wartości na podstawie, których bardzo łatwo go wyliczyć. W najprostszej postaci wzoru na momentobrotowy jesttoiloczyn siły i ramienia,na jakim działa ta siła. Powstająca na obwodzie wirnika siła elektrodynamiczna F, obracając się razem z wirnikiem wykonuje pracę W, dostarczając w tym czasie moc P Zatem generowany w tycz warunkach moment elektromagnetyczny M: Wartości mocy znamionowej silnika P i prędkości asynchronicznej n podawane są zawsze na tabliczkach znamionowych silników, zatem mając te wartości można łatwo wyliczyć wartość znamionowego momentu silnika.

16 Charakterystyka mechaniczna Charakterystyka mechaniczna silnika indukcyjnego ukazuje zależność momentu na jego wale od prędkości obrotowej silnika Jak juz wspomniano wcześniej prędkość obrotową silnika asynchronicznego można wyrazić za pomocą poślizgu. Charakterystykę mechaniczną silnika można wyrazić za pomocą następującego wzoru: Wzór ten nazywany jest wzorem Klossa. M r moment rozruchowy s k- poślizg krytyczny M -moment silnika M m -moment krytyczny silnika s -poślizg s m- poślizg krytyczny

17 Rodzaje pracy silników indukcyjnych Charakterystyka mechaniczna silnika indukcyjnego dla różnych rodzajów jego pracy

18 Rozruch silników asynchronicznych Rozruch bezpośredni Rozruch gwiazda-trójkąt Rozruch przez zmianę rezystancji w obwodzie wirnika Zastosowanie softstartu

19 Rozruch bezpośredni Rozruch silnika jest możliwy, jeżeli powstający w chwili rozruchu moment elektromagnetyczny jest większy niż moment obciążenia. Najprostszym sposobem dokonania rozruchu silnika indukcyjnego jest podłączenie uzwojeń stojana do 3-fazowego źródła zasilania (w przypadku silnika 3-fazowego), jest to tzw. rozruch bezpośredni. W tym przypadku pobierany prąd rozruchu jest wielokrotnie większy niż prąd znamionowy (do 8 razy), co powoduje nagrzewanie się uzwojeń, a także może spowodować spadki napięcia sieci zasilającej. Wartość powstającego momentu elektromagnetycznego nie jest zbyt duża, dlatego, aby silnik mógł wystartować nie może być zbytnio obciążony. Ze względu na te ograniczenia rozruch bezpośredni stosuje się dla silników o małych mocach (do kilkunastu kw).

20 Rozruch gwiazda-trójkąt Sposobem na zmniejszenie prądu rozruchowego, jest zastosowanie w celach rozruchowych przełącznika gwiazda- trójkąt. Rozruch ten jest jednak możliwy tylko dla silników 3-fazowych, które mają wyprowadzone 6 zacisków na tabliczce zaciskowej, umożliwiajace odpowiednie podłaczenie uzwojeń stojana w gwiazdę lub w trójkąt. uzwojenia połączone w gwiazdę uzwojenia połączone w trójkąt

21 Połączenie w gwiazdę polega na połączeniu końców wszystkich trzech uzwojeń do jednego wspólnego punktu, a pozostałych trzech końców do kolejnych faz sieci zasilającej. W ten sposób każde z uzwojeń stojana podłączone jest jednym końcem do przewodu neutralnego N, a drugim do przewodu fazowego(l1, L2 lub L3). Na każdym z tych uzwojeń występuje zatem napięcie fazowe (czyli w naszych warunkach wynosi ono 230V). Zwykle nie stosuje się połączenie punktu wspólnego wszystkich uzwojeń z punktem neutralnym N ponieważ nie jest ono konieczne. uzwojenia stojana połączone w gwiazdę
22 Połączenie w trójkąt polega na połączeniu końca uzwojenia danej fazy z początkami uzwojenia fazy następnej (punkt U2 łączony z V1, V2 z W1 a W2 z U1). Połączone w ten sposób uzwojenia tworzą zamknięty obwód, a jego wygląd przypomina trójkąt. Punkty wspólne uzwojeń łączone są następnie do kolejnych faz sieci zasilającej. W tym połączeniu wcale nie wykorzystuje się punktu neutralnego. Przy połączeniu w trójkąt na każdym z uzwojeń panuje napięcie międzyfazowe (które w naszych warunkach wynosi 400V). uzwojenia stojana połączone w trójkąt
23 Przy połączeniu uzwojeń silnika w trójkąt, prąd pobierany przez silnik z sieci jest 3-krotnie większy niż prąd pobierany przy połączeniu w gwiazdę. Także moment elektromagnetyczny a więc i moc silnika w tym przypadku są 3- krotnie większe. Stosując przełącznik gwiazda trójkąt możemy wystartować silnik połączony w gwiazdę, przez co będzie mniejszy pobór prądu z sieci zasilającej, a następnie po osiągnięciu przez silnik odpowiedniej prędkości obrotowej przełączyć uzwojenia stojana w trójkąt, tak, aby silnik mógł zapewnić pożądaną przez nas moc. W starszych rozwiązaniach przełączenie zwykle dokonywane było ręcznie przez operatora, obecnie w układach stosuje się specjalizowane do tego celu układy styczników i przekaźników dokonujące automatycznego przełączenia po nastawionym wcześniej czasie.
24 Rozruch przez zmianę rezystancji w obwodzie wirnika W przypadku silnika pierścieniowego w celach rozruchowych można stosować dodatkowe rezystory przyłączane do uzwojeń wirnika co powoduje spadek prądu wirnika, a zatem również spadek prądu pobieranego z sieci. Wadą tego rozwiązania, podobnie jak w przypadku rozruchu gwiazda - trójkąt jest mniejszy moment rozruchowy silnika, poza tym jak juz wspomniano wcześniej, ze względu na skomplikowana budowę i koszty utrzymania konstrukcja ta jest obecnie rzadko stosowana.
25 Zastosowanie softstartu W nowoczesnych układach napędowych, do łagodnego rozruchu 3-fazowych silników indukcyjnych stosuje się specjalizowane urządzenia, nazywane układami soft - start (miękkiego rozruchu), które mają za zadanie redukuję niekorzystnych zjawisk występujących podczas rozruchu, wpływających na żywotność silników i jakość ich pracy. Ich zasada działania opiera się na, płynnej regulacji napięcia podawanego na uzwojenia (lub jedno z uzwojeń) W roli elementów sterujących stosuje się najczęściej tyrystory. Zwykle urządzenia takie umożliwiaja kontrole i możliwość nastawienia wielu parametrów takich jak czas rozruchu, wartość początkowego momentu rozruchowego, kolejności faz i czy temperaturęprzegrzania. schemat podłączenia silnika do sieci 3-fazowej za pośrednictwem softstartu.
26 Zmiana prędkości obrotowej silnika Jak juz wspomniano i pokazano wcześniej w silniku indukcyjnym prędkość obrotowa wyraźnie zależy od obciążenia. A więc czy możliwa jest regulacja prędkości przez zmianę obciążenia? Teoretycznie tak, ale chyba nie o to chodzi. Chodzi raczej o to, aby istniała możliwość zmiany wartości prędkości obrotowej silnika przy ustalonych już warunkach zasilania i obciążenia. Po przekształceniu przytoczonego wcześniej wzoru na poślizg otrzymujemy wzór na prędkość obrotową silnika indukcyjnego, na podstawie, którego możemy stwierdzić, że będzie ona zależała od: prędkość obrotowa silnika indukcyjnego f - częstotliwości zasilania p -liczby par biegunów s -poślizgu
27 Zmiana liczby par biegunów W tym przypadku zmianę prędkości obrotowej silnika osiąga się przez zmianę liczby par biegunów w stojanie. Realizuje się to zwykle umieszczając w stojanie kilka niezależnych uzwojeń o różnych liczbach par biegunów (z reguły nie więcej niż dwa) lub jedno uzwojenie o przełączalnej liczbie par biegunów Przełączając zasilanie pomiędzy uzwojeniami, otrzyma się pola wirujące z różnymi prędkościami. W tym przypadku możliwa jest tylko i wyłącznie skokowa regulacja prędkości obrotowej, Silniki takie nazywane są silnikami wielobiegowymi, i wykonuje się je wyłącznie jako silniki klatkowe(dla silników pierścieniowych trzeba by również każdorazowo zmieniać liczbę biegunów wirnika). Silniki te znajdują zastosowanie w wszelkiego rodzaju obrabiarkach, zastępując, jeżeli to możliwe, przekładnie mechaniczne p n n Tabela wartości prędkości synchronicznych (n) i typowych prędkości asynchronicznych (n 1 ) dla liczby par biegunów stojana (p) (jak łatwo policzyć dla poślizgu s=0.04).
28 Zmiana rezystancji w obwodzie wirnika Dla silników pierścieniowych podobnie jak dla celów rozruchowych, podłącza się dodatkowe rezystancji w obwód wirnika, Połączone szeregowo z uzwojeniem wirnika rezystancje spowodują spadek prądu płynącego w wirniku, a więc i spadek powstającej siły elektrodynamicznej działającej na wirnik a co za tym idzie spadek momentu i w końcu spadek prędkości obrotowej silnika.
29 Zmiana częstotliwości zasilania Częstotliwość zasilania wpływa na prędkość wirowania pola magnetycznego wytwarzanego w stojanie, czyli na prędkość synchroniczną silnika. Zmieniając jej wartość możemy płynnie zmieniać prędkość silnika w zakresie od postoju do prędkości nawet przekraczającej prędkość znamionową (przekraczając prędkość znamionową trzeba wziąć pod uwagę wytrzymałość mechaniczną silnika i wytrzymałość elektryczną izolacji). Charakterystyki mechaniczne przy zachowaniu U/f = const.
30 Obecnie ze względu na bardzo dynamiczny rozwój elektroniki, energoelektroniki, i znaczny spadek cen urządzeń mikroprocesorowych, silniki indukcyjne zasila się z urządzeń zwanych falownikami. Urządzenia te w najprostszych rozwiązaniach bazują właśnie na zasadzie zachowywania stałej wartości stosunku U/f, a oprócz regulacji prędkości obrotowej, pozwalają na kontrolę wielu parametrów silnika, co zdecydowanie poprawia jakość funkcjonowania takiego silnika i wydłuża czas jego eksploatacji. falownik i silnik
31 Hamowanie silników indukcyjnych Elektryczne hamowanie silnikiem występuje wówczas, gdy moment elektromagnetyczny silnika działa w kierunku przeciwnym do kierunku prędkości obrotowej. Przy trójfazowym zasilaniu silnika indukcyjnego moŝemy zastosować jeden z trzech rodzajów hamowania. Są to: hamowanie naturalne (praca hamulcowa), zwane takŝe hamowaniem przeciwprądem lub hamowaniem prądem sieci, występujące przy prędkości wirowania przeciwnej do kierunku wirowania pola magnetycznego; hamowanie prądnicowe (ze zwrotem energii do sieci), zwane nadsynchronicznym, które występuje przy prędkości wirnika większej od prędkości wirowania pola magnetycznego, hamowanie dynamiczne, czyli hamowanie prądem stałym. Przy rozpatrywaniu kaŝdego z rodzajów hamowania naleŝy zwrócić uwagę na zakresy prędkości obrotowych oraz nachylenie charaktertystyki mechanicznej silnika i urządzenia hamowanego. Okoliczności te w istotny sposób wpływają na ekonomiczność hamowania, gdyŝ energia hamowania, jaką pobiera silnik w formie energii mechanicznej, moŝe być oddawana do sieci w postaci energii elektrycznej lub tracona w silniku i włączonych w obwód wirnika opornikach.
32 Hamowanie naturalne Hamowanie przeciwprądem występuje wówczas, gdy wirnik jest napędzany w kierunku przeciwnym do kierunku wirowania pola magnetycznego. Stan taki może wystąpić wówczas, gdy moment M wytworzony w silniku stanie się mniejszyodmomentuhamującegom h naskutekwłączeniadużejrezystancjiw obwód wirnika. Na rysunku 1 pokazano układ połączeń silnika pierścieniowego napędzającego dźwig podnoszący ciężar. Moment od ciężaru oznaczmy przez M h Na rysunku 2 krzywa 1a jest charakterystyką mechaniczną naturalną n = f(m) silnika, a proste 2a, 3a i 4a są charakterystykami mechanicznymi (na części prostoliniowej charakterystyki) przy dodatkowych, coraz to większych rezystancjach włączonych w obwód wirnika. Można tak zwiększyć rezystancje w wirniku, że maszyna przejdzie na charakterystyki odpowiadające prostym 1b, 2b itd. Po przejściu przez 0 prędkość obrotowa zmieni kierunek uzyskując wartości ujemne, odpowiadające punktom przecięcia prostych 1b i 2b z prostą momentu hamującego M h pochodzącego odciężarug,czylibędziepracowaćzpoślizgiems>1.
33 Rys. 1. Układ połączeń silnika pierścieniowego napędzającego dźwig Rys. 2. Hamowanie naturalne i prądnicowe maszyną indukcyjną
34 Ciężar zaczyna być opuszczany w dół z prędkością zależną od wartości rezystancji włączonej w obwód wirnika. Wirnik obraca się w kierunku przeciwnym do kierunku wirowania pola magnetycznego, maszyna pracuje w zakresie pracy hamulcowej. Moc pobrana przez maszynę pracującą w tym zakresie jest zużyta na straty. Większość tych strat wydziela się w oporniku regulacyjnym w postaci ciepła, co jest poważną wadą tego hamowania. Dalsze nachylenie charaktertystyki n = f(m) poprzez dalsze zwiększanie rezystancji regulacyjnych powoduje utracenie stabilności pracy. Jest to podstawowa wada (obok nadmiernego nagrzewania się uzwojeń) hamowania w zakresie pracy hamulcowej.
35 Hamowanie prądnicowe Przypadek hamowania prądnicowego może wystąpić np. przy opuszczaniu ciężaru w dół za pomocą silnika normalnie podnoszącego ciężar do góry. Do zrealizowania wyżej wymienionego przypadku hamowania zamienia się w maszynie indukcyjnej kierunek wirowania strumienia przez skrzyżowanie dwóch przewodów doprowadzających napięcie do silnika. W konsekwencji tego zmienia się znak wytworzonego w maszynie momentu i zależność M = f(n) ma przebieg jak na rys. 2. Charakterystyki M = f(n) przecinają prostą M h (obrazującą obciążenie) w zakresie pracy prądnicowej przy prędkości nadsynchronicznej, ujemnej w stosunku do prędkości, jakie występowały przy podnoszeniu ciężaru. Włączając odpowiednie rezystancje w obwód wirnika, uzyskuje się proste 1c, 2c, 3c, które w punktach przecięcia z prostą M h wyznaczają odpowiednie prędkości. Przy takim sposobie hamowania maszyna indukcyjna pracuje jako prądnica i przekazuje do sieci moc uzyskaną od napędzającego ją, opadającego ciężaru G. Jest to zaleta hamowania nadsynchronicznego; jego wadą jest możliwość hamowania tylko przy dużych prędkościach obrotowych. Innym przypadkiem pracy prądnicowej jest praca silnika indukcyjnego przyłączonego do sieci i napędzanego powyżej prędkości synchronicznej np. za pomocą turbiny. Nie należy wówczas zmieniać kieruku obrotów a jedynie "dopędzić" silnik do prędkości ponadsynchronicznej.
36 Hamowanie dynamiczne (prądem stałym) Hamowanie dynamiczne realizuje się w ten sposób, że uzwojenie stojana odłącza się od napięcia, a następnie zasila się je z sieci prądu stałego, tak, aby wytworzyć stały strumień magnetyczny. W wirniku wirującym w tym stałym polu indukują się napięcia i płyną prądy, które wytwarzają moment skierowany przeciwnie do kierunku wirowania wirnika. Wartość tego momentu można regulować zmieniając wartość prądu stałego zasilającego stojan lub włączając odpowiednią rezystancję dodatkową Rd. Przy stosowaniu hamowania dynamicznego nie można doprowadzić do całkowitego zahamowania urządzenia, gdyż przy spadku prędkości napięcie indukowane w wirniku maleje i moment też się zmniejsza. Energia mechaniczna zamienia się całkowicie na ciepło w wirniku i ewentualnie połączonej z nim szeregowo rezystancji. Układy zasilania uzwojenia stojana przedstawione są rysunku. Źródłem prądu stałego jest najczęściej odpowiedni układ prostowniczy, zasilany z sieci przez transformator obniżający napięcie. Napięcie zasilające wynosi tylko kilka procent napięcia znamionowego silnika. Moc pobierana przez silnik przy hamowaniu dynamicznym jest znacznie mniejsza niż przy hamowaniu przeciwprądem.
Silniki indukcyjne. Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe.
 Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
Na podstawie uproszczonego schematu zastępczego silnika w stanie zwarcia (s = 1) określamy:
 określamy:") Temat: Urządzenia rozruchowe i regulacyjne. I. Rozruch silników indukcyjnych. Rozruchem nazywamy taki stan pracy od chwili załączenia napięcia do osiągnięcia przez maszynę ustalonej prędkości określonej
Temat: Urządzenia rozruchowe i regulacyjne. I. Rozruch silników indukcyjnych. Rozruchem nazywamy taki stan pracy od chwili załączenia napięcia do osiągnięcia przez maszynę ustalonej prędkości określonej
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
PRĄDNICE I SILNIKI. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
Pracownia Automatyki i Elektrotechniki Katedry Tworzyw Drzewnych Ćwiczenie 5. Analiza pracy oraz zasada działania silników asynchronicznych
 ĆWCZENE 5 Analiza pracy oraz zasada działania silników asynchronicznych 1. CEL ĆWCZENA Celem ćwiczenia jest zapoznanie się z podstawowymi układami elektrycznego sterowania silnikiem trójfazowym asynchronicznym
ĆWCZENE 5 Analiza pracy oraz zasada działania silników asynchronicznych 1. CEL ĆWCZENA Celem ćwiczenia jest zapoznanie się z podstawowymi układami elektrycznego sterowania silnikiem trójfazowym asynchronicznym
Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu
 Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu Laboratorium Elektryczne Pracownia Maszyn Elektrycznych Instrukcja Laboratoryjna: Układy rozruchowe silników 3-fazowych. Opracował: mgr inż.
Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu Laboratorium Elektryczne Pracownia Maszyn Elektrycznych Instrukcja Laboratoryjna: Układy rozruchowe silników 3-fazowych. Opracował: mgr inż.
Maszyna indukcyjna jest prądnicą, jeżeli prędkość wirnika jest większa od prędkości synchronicznej, czyli n > n 1 (s < 0).
.") Temat: Wielkości charakteryzujące pracę silnika indukcyjnego. 1. Praca silnikowa. Maszyna indukcyjna jest silnikiem przy prędkościach 0 < n < n 1, co odpowiada zakresowi poślizgów 1 > s > 0. Moc pobierana
Temat: Wielkości charakteryzujące pracę silnika indukcyjnego. 1. Praca silnikowa. Maszyna indukcyjna jest silnikiem przy prędkościach 0 < n < n 1, co odpowiada zakresowi poślizgów 1 > s > 0. Moc pobierana
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Rdzeń stojana umieszcza się w kadłubie maszyny, natomiast rdzeń wirnika w maszynach małej mocy bezpośrednio na wale, a w dużych na piaście.
 Temat: Typowe uzwojenia maszyn indukcyjnych. Budowa maszyn indukcyjnych Zasadę budowy maszyny indukcyjnej przedstawiono na rys. 6.1. Część nieruchoma stojan ma kształt wydrążonego wewnątrz walca. W wewnętrznej
Temat: Typowe uzwojenia maszyn indukcyjnych. Budowa maszyn indukcyjnych Zasadę budowy maszyny indukcyjnej przedstawiono na rys. 6.1. Część nieruchoma stojan ma kształt wydrążonego wewnątrz walca. W wewnętrznej
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej.
 Szkoły Policealnej Zawodowej.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Silnik indukcyjny - historia
 Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego.
 Kwalifikacyjnego kursu zawodowego.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5
 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
Silniki synchroniczne
 Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Wykład 1. Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi.
 Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO
 Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO 1 Źródła energii elektrycznej prądu przemiennego: 1. prądnice synchroniczne 2. prądnice asynchroniczne Surowce energetyczne: węgiel kamienny i brunatny
Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO 1 Źródła energii elektrycznej prądu przemiennego: 1. prądnice synchroniczne 2. prądnice asynchroniczne Surowce energetyczne: węgiel kamienny i brunatny
Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny.
 Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny. 1. Silnik komutatorowy jednofazowy szeregowy (silniki uniwersalne). silniki komutatorowe jednofazowe szeregowe maja budowę
Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny. 1. Silnik komutatorowy jednofazowy szeregowy (silniki uniwersalne). silniki komutatorowe jednofazowe szeregowe maja budowę
Charakterystyka rozruchowa silnika repulsyjnego
 Silnik repulsyjny Schemat połączeń silnika repulsyjnego Silnik tego typu budowany jest na małe moce i używany niekiedy tam, gdzie zachodzi potrzeba regulacji prędkości. Układ połączeń silnika repulsyjnego
Silnik repulsyjny Schemat połączeń silnika repulsyjnego Silnik tego typu budowany jest na małe moce i używany niekiedy tam, gdzie zachodzi potrzeba regulacji prędkości. Układ połączeń silnika repulsyjnego
Badanie trójfazowego silnika indukcyjnego pierścieniowego
 Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Napędów Elektrycznych Ćwiczenie N4 - instrukcja Badanie trójfazowego silnika indukcyjnego pierścieniowego Warszawa 03r.
Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Napędów Elektrycznych Ćwiczenie N4 - instrukcja Badanie trójfazowego silnika indukcyjnego pierścieniowego Warszawa 03r.
SILNIKI PRĄDU STAŁEGO
 SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
MASZYNY INDUKCYJNE SPECJALNE
 MASZYNY INDUKCYJNE SPECJALNE Maszyny indukcyjne pierścieniowe, dzięki wyprowadzeniu na zewnątrz końców uzwojenia wirnika, możemy wykorzystać jako maszyny specjalne. W momencie potrzeby regulacji przesunięcia
MASZYNY INDUKCYJNE SPECJALNE Maszyny indukcyjne pierścieniowe, dzięki wyprowadzeniu na zewnątrz końców uzwojenia wirnika, możemy wykorzystać jako maszyny specjalne. W momencie potrzeby regulacji przesunięcia
Silniki prądu przemiennego
 Silniki prądu przemiennego Podział maszyn prądu przemiennego Asynchroniczne indukcyjne komutatorowe jedno- i wielofazowe synchroniczne ze wzbudzeniem reluktancyjne histerezowe Silniki indukcyjne uzwojenie
Silniki prądu przemiennego Podział maszyn prądu przemiennego Asynchroniczne indukcyjne komutatorowe jedno- i wielofazowe synchroniczne ze wzbudzeniem reluktancyjne histerezowe Silniki indukcyjne uzwojenie
Opracował: mgr inż. Marcin Wieczorek
 Opracował: mgr inż. Marcin Wieczorek Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M obc o moment strat jałowych M 0 czyli: wirnik będzie wirował z prędkością
Opracował: mgr inż. Marcin Wieczorek Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M obc o moment strat jałowych M 0 czyli: wirnik będzie wirował z prędkością
Badanie trójfazowego silnika indukcyjnego klatkowego
 Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Napędów Elektrycznych Ćwiczenie N - instrukcja Badanie trójfazowego silnika indukcyjnego klatkowego Warszawa 03r. SPIS
Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Napędów Elektrycznych Ćwiczenie N - instrukcja Badanie trójfazowego silnika indukcyjnego klatkowego Warszawa 03r. SPIS
Pracę każdej prądnicy w sposób jednoznaczny określają następujące wielkości:
 Temat: Prądnice prądu stałego obcowzbudne i samowzbudne. Pracę każdej prądnicy w sposób jednoznaczny określają następujące wielkości: U I(P) I t n napięcie twornika - prąd (moc) obciążenia - prąd wzbudzenia
Temat: Prądnice prądu stałego obcowzbudne i samowzbudne. Pracę każdej prądnicy w sposób jednoznaczny określają następujące wielkości: U I(P) I t n napięcie twornika - prąd (moc) obciążenia - prąd wzbudzenia
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 10 str.1/2 ĆWICZENIE 10
 Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 10 str.1/ ĆWICZENIE 10 UKŁADY ELEKTRYCZNEGO STEROWANIA NA PRZYKŁADZIE STEROWANIA SEKWENCYJNO-CZASOWEGO NAPĘDU PRASY 1. CEL ĆWICZENIA: zapoznanie
Pracownia Automatyki Katedry Tworzyw Drzewnych Ćwiczenie 10 str.1/ ĆWICZENIE 10 UKŁADY ELEKTRYCZNEGO STEROWANIA NA PRZYKŁADZIE STEROWANIA SEKWENCYJNO-CZASOWEGO NAPĘDU PRASY 1. CEL ĆWICZENIA: zapoznanie
bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.
, bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.") Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Wiadomości do tej pory Podstawowe pojęcia Elementy bierne Podstawowe prawa obwodów elektrycznych Moc w układach 1-fazowych Pomiary
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Wiadomości do tej pory Podstawowe pojęcia Elementy bierne Podstawowe prawa obwodów elektrycznych Moc w układach 1-fazowych Pomiary
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego
 Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
w10 Silnik AC y elektrotechniki odstaw P
 40 Wirujące pole magnetyczne Moment synchroniczny Moment asynchroniczny Charakterystyka silnika synchronicznego Charakterystyka silnika asynchronicznego Silnik klatkowy Silnik indukcyjny jednofazowy Moment
40 Wirujące pole magnetyczne Moment synchroniczny Moment asynchroniczny Charakterystyka silnika synchronicznego Charakterystyka silnika asynchronicznego Silnik klatkowy Silnik indukcyjny jednofazowy Moment
Oddziaływanie wirnika
 Oddziaływanie wirnika W każdej maszynie prądu stałego, pracującej jako prądnica lub silnik, może wystąpić taki szczególny stan pracy, że prąd wirnika jest równy zeru. Jedynym przepływem jest wówczas przepływ
Oddziaływanie wirnika W każdej maszynie prądu stałego, pracującej jako prądnica lub silnik, może wystąpić taki szczególny stan pracy, że prąd wirnika jest równy zeru. Jedynym przepływem jest wówczas przepływ
LABORATORIUM PODSTAW ELEKTROTECHNIKI Badanie silnika bocznikowego prądu stałego
 Ćwiczenie 3 Wydział Geoinżynierii, Górnictwa i Geologii LABORATORIUM PODSTAW ELEKTROTECHNIKI Badanie silnika bocznikowego prądu stałego Opracował: Grzegorz Wiśniewski Zagadnienia do przygotowania Urządzenia
Ćwiczenie 3 Wydział Geoinżynierii, Górnictwa i Geologii LABORATORIUM PODSTAW ELEKTROTECHNIKI Badanie silnika bocznikowego prądu stałego Opracował: Grzegorz Wiśniewski Zagadnienia do przygotowania Urządzenia
Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne
 Opracowała: mgr inż. Katarzyna Łabno Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne Dla klasy 2 technik mechatronik Klasa 2 38 tyg. x 4 godz. = 152 godz. Szczegółowy rozkład materiału:
Opracowała: mgr inż. Katarzyna Łabno Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne Dla klasy 2 technik mechatronik Klasa 2 38 tyg. x 4 godz. = 152 godz. Szczegółowy rozkład materiału:
Silniki prądu stałego
 Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Jeżeli zwój znajdujący się w polu magnetycznym o indukcji B obracamy z prędkością v, to w jego bokach o długości l indukuje się sem o wartości:
 Temat: Podział maszyn prądu stałego i ich zastosowanie. 1. Maszyny prądu stałego mogą mieć zastosowanie jako prądnice i jako silniki. Silniki prądu stałego wykazują dobre właściwości regulacyjne. Umożliwiają
Temat: Podział maszyn prądu stałego i ich zastosowanie. 1. Maszyny prądu stałego mogą mieć zastosowanie jako prądnice i jako silniki. Silniki prądu stałego wykazują dobre właściwości regulacyjne. Umożliwiają
mgr inŝ. TADEUSZ MAŁECKI MASZYNY ELEKTRYCZNE Kurs ELEKTROMECHANIK stopień pierwszy Zespół Szkół Ogólnokształcących i Zawodowych
 mgr inŝ. TADEUSZ MAŁECKI MASZYNY ELEKTRYCZNE Kurs ELEKTROMECHANIK stopień pierwszy Zespół Szkół Ogólnokształcących i Zawodowych Mosina 2001 Od autora Niniejszy skrypt został opracowany na podstawie rozkładu
mgr inŝ. TADEUSZ MAŁECKI MASZYNY ELEKTRYCZNE Kurs ELEKTROMECHANIK stopień pierwszy Zespół Szkół Ogólnokształcących i Zawodowych Mosina 2001 Od autora Niniejszy skrypt został opracowany na podstawie rozkładu
Silniki prądu stałego. Wiadomości ogólne
 Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Badanie prądnicy synchronicznej
 POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH LABORATORIUM ELEKTRYCZNE Badanie prądnicy synchronicznej (E 18) Opracował: Dr inż. Włodzimierz OGULEWICZ
POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH LABORATORIUM ELEKTRYCZNE Badanie prądnicy synchronicznej (E 18) Opracował: Dr inż. Włodzimierz OGULEWICZ
Data wykonania ćwiczenia... Data oddania sprawozdania
 Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie M - instrukcja Badanie trójfazbwych maszyn indukcyjnych: silnik klatkbwy, silnik
Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie M - instrukcja Badanie trójfazbwych maszyn indukcyjnych: silnik klatkbwy, silnik
Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników:
 Temat: Analiza pracy i właściwości ruchowych maszyn synchronicznych Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników: budowy wirnika stanu nasycenia rdzenia
Temat: Analiza pracy i właściwości ruchowych maszyn synchronicznych Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników: budowy wirnika stanu nasycenia rdzenia
ROZRUCH I REGULACJA PRĘDKOŚCI OBROTOWEJ SILNIKA INDUKCYJNEGO PIERŚCIENIOWEGO
 Rozruch i regulacja obrotów silnika pierścieniowego 1 z 8 PRACOWNIA ENERGOELEKTRONICZNA w ZST Radom 2006/2007 ROZRUCH I REGULACJA PRĘDKOŚCI OBROTOWEJ SILNIKA INDUKCYJNEGO PIERŚCIENIOWEGO Przed wykonaniem
Rozruch i regulacja obrotów silnika pierścieniowego 1 z 8 PRACOWNIA ENERGOELEKTRONICZNA w ZST Radom 2006/2007 ROZRUCH I REGULACJA PRĘDKOŚCI OBROTOWEJ SILNIKA INDUKCYJNEGO PIERŚCIENIOWEGO Przed wykonaniem
BADANIE SILNIKA INDUKCYJNEGO
 BADANIE SILNIKA INDUKCYJNEGO Cel ćwiczenia: poznanie budowy, zasady działania, metod rozruchu, źródeł strat mocy i podstawowych charakterystyk silnika indukcyjnego trójfazowego. 4.. Budowa i zasada działania
BADANIE SILNIKA INDUKCYJNEGO Cel ćwiczenia: poznanie budowy, zasady działania, metod rozruchu, źródeł strat mocy i podstawowych charakterystyk silnika indukcyjnego trójfazowego. 4.. Budowa i zasada działania
Badanie prądnicy prądu stałego
 POLTECHNKA ŚLĄSKA WYDZAŁ NŻYNER ŚRODOWSKA ENERGETYK NSTYTUT MASZYN URZĄDZEŃ ENERGETYCZNYCH LABORATORUM ELEKTRYCZNE Badanie prądnicy prądu stałego (E 18) Opracował: Dr inż. Włodzimierz OGULEWCZ 3 1. Cel
POLTECHNKA ŚLĄSKA WYDZAŁ NŻYNER ŚRODOWSKA ENERGETYK NSTYTUT MASZYN URZĄDZEŃ ENERGETYCZNYCH LABORATORUM ELEKTRYCZNE Badanie prądnicy prądu stałego (E 18) Opracował: Dr inż. Włodzimierz OGULEWCZ 3 1. Cel
9 Rozruch i hamowanie silników asynchronicznych trójfazowych
 Rozruch i hamowanie silników asynchronicznych trójfazowych 9 Rozruch i hamowanie silników asynchronicznych trójfazowych Cel ćwiczenia Celem ćwiczenia jest poznanie najczęściej stosowanych metod rozruchu
Rozruch i hamowanie silników asynchronicznych trójfazowych 9 Rozruch i hamowanie silników asynchronicznych trójfazowych Cel ćwiczenia Celem ćwiczenia jest poznanie najczęściej stosowanych metod rozruchu
ELEKTROTECHNIKA I ELEKTRONIKA
 UNIWERSYTET TECHNOLOGICZNO-PRZYRODNICZY W BYDGOSZCZY WYDZIAŁ INŻYNIERII MECHANICZNEJ INSTYTUT EKSPLOATACJI MASZYN I TRANSPORTU ZAKŁAD STEROWANIA ELEKTROTECHNIKA I ELEKTRONIKA ĆWICZENIE: E19 BADANIE PRĄDNICY
UNIWERSYTET TECHNOLOGICZNO-PRZYRODNICZY W BYDGOSZCZY WYDZIAŁ INŻYNIERII MECHANICZNEJ INSTYTUT EKSPLOATACJI MASZYN I TRANSPORTU ZAKŁAD STEROWANIA ELEKTROTECHNIKA I ELEKTRONIKA ĆWICZENIE: E19 BADANIE PRĄDNICY
Laboratorium Elektromechaniczne Systemy Napędowe BADANIE AUTONOMICZNEGO GENERATORA INDUKCYJNEGO
 Laboratorium Elektromechaniczne Systemy Napędowe Ćwiczenie BADANIE AUTONOMICZNEGO GENERATORA INDUKCYJNEGO Instrukcja Opracował: Dr hab. inż. Krzysztof Pieńkowski, prof. PWr Wrocław, listopad 2014 r. Ćwiczenie
Laboratorium Elektromechaniczne Systemy Napędowe Ćwiczenie BADANIE AUTONOMICZNEGO GENERATORA INDUKCYJNEGO Instrukcja Opracował: Dr hab. inż. Krzysztof Pieńkowski, prof. PWr Wrocław, listopad 2014 r. Ćwiczenie
- kompensator synchroniczny, to właściwie silnik synchroniczny biegnący jałowo (rys.7.41) i odpowiednio wzbudzony;
 i odpowiednio wzbudzony;") Temat: Maszyny synchroniczne specjalne (kompensator synchroniczny, prądnica tachometryczna synchroniczna, silniki reluktancyjne, histerezowe, z magnesami trwałymi. 1. Kompensator synchroniczny. - kompensator
Temat: Maszyny synchroniczne specjalne (kompensator synchroniczny, prądnica tachometryczna synchroniczna, silniki reluktancyjne, histerezowe, z magnesami trwałymi. 1. Kompensator synchroniczny. - kompensator
Wykład 2. Tabliczka znamionowa zawiera: Moc znamionową P N, Napięcie znamionowe uzwojenia stojana U 1N, oraz układ
 Serwonapędy w automatyce i robotyce Wykład 2 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik indukcyjny 3-fazowy tabliczka znam. Tabliczka znamionowa zawiera: Moc znamionową P, apięcie znamionowe
Serwonapędy w automatyce i robotyce Wykład 2 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik indukcyjny 3-fazowy tabliczka znam. Tabliczka znamionowa zawiera: Moc znamionową P, apięcie znamionowe
Wykład 4. Strumień magnetyczny w maszynie synchroniczne magnes trwały, elektromagnes. Magneśnica wirnik z biegunami magnetycznymi. pn 60.
 Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
W stojanie (zwanym twornikiem) jest umieszczone uzwojenie prądu przemiennego jednofazowego lub znacznie częściej trójfazowe (rys. 7.2).
 jest umieszczone uzwojenie prądu przemiennego jednofazowego lub znacznie częściej trójfazowe (rys. 7.2).") Temat: Rodzaje maszyn synchronicznych. 1. Co to jest maszyna synchroniczna. Maszyną synchroniczną nazywamy się maszyną prądu przemiennego, której wirnik w stanie ustalonym obraca się z taką samą prędkością,
Temat: Rodzaje maszyn synchronicznych. 1. Co to jest maszyna synchroniczna. Maszyną synchroniczną nazywamy się maszyną prądu przemiennego, której wirnik w stanie ustalonym obraca się z taką samą prędkością,
POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH LABORATORIUM ELEKTRYCZNE. Układ LEONARDA.
 POLITECHNIK ŚLĄK YDZIŁ INŻYNIERII ŚRODOIK I ENERETYKI INTYTUT ZYN I URZĄDZEŃ ENERETYCZNYCH LBORTORIU ELEKTRYCZNE Układ LEONRD. (E 20) Opracował: Dr inż. łodzimierz OULEICZ Cel ćwiczenia. Celem ćwiczenia
POLITECHNIK ŚLĄK YDZIŁ INŻYNIERII ŚRODOIK I ENERETYKI INTYTUT ZYN I URZĄDZEŃ ENERETYCZNYCH LBORTORIU ELEKTRYCZNE Układ LEONRD. (E 20) Opracował: Dr inż. łodzimierz OULEICZ Cel ćwiczenia. Celem ćwiczenia
Maszyny Elektryczne i Transformatory st. n. st. sem. III (zima) 2018/2019
 2018/2019") Kolokwium poprawkowe Wariant A Maszyny Elektryczne i Transormatory st. n. st. sem. III (zima) 018/019 Transormator Transormator trójazowy ma następujące dane znamionowe: S 00 kva 50 Hz HV / LV 15,75 ±x,5%
Kolokwium poprawkowe Wariant A Maszyny Elektryczne i Transormatory st. n. st. sem. III (zima) 018/019 Transormator Transormator trójazowy ma następujące dane znamionowe: S 00 kva 50 Hz HV / LV 15,75 ±x,5%
Temat: Analiza pracy transformatora: stan jałowy, obciążenia i zwarcia.
 Temat: Analiza pracy transformatora: stan jałowy, obciążenia i zwarcia. Transformator może się znajdować w jednym z trzech charakterystycznych stanów pracy: a) stanie jałowym b) stanie obciążenia c) stanie
Temat: Analiza pracy transformatora: stan jałowy, obciążenia i zwarcia. Transformator może się znajdować w jednym z trzech charakterystycznych stanów pracy: a) stanie jałowym b) stanie obciążenia c) stanie
I. Podstawowe wiadomości dotyczące maszyn elektrycznych
 3 I. Podstawowe wiadomości dotyczące maszyn elektrycznych 1.1 Rodzaje i klasyfikacja maszyn elektrycznych... 10 1.2 Rodzaje pracy... 12 1.3 Temperatura otoczenia i przyrost temperatury... 15 1.4 Zabezpieczenia
3 I. Podstawowe wiadomości dotyczące maszyn elektrycznych 1.1 Rodzaje i klasyfikacja maszyn elektrycznych... 10 1.2 Rodzaje pracy... 12 1.3 Temperatura otoczenia i przyrost temperatury... 15 1.4 Zabezpieczenia
TRANSFORMATORY. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 TRANSFORMATORY Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Maszyny elektryczne Przemiana energii za pośrednictwem pola magnetycznego i prądu elektrycznego
TRANSFORMATORY Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Maszyny elektryczne Przemiana energii za pośrednictwem pola magnetycznego i prądu elektrycznego
MOŻLIWOŚCI ZASTOSOWANIA MONITORINGU POBORU MOCY W MASZYNACH ODLEWNICZYCH Z NAPĘDEM ELEKTRYCZNYM E. ZIÓŁKOWSKI 1 R. WRONA 2
 MOŻLIWOŚCI ZASTOSOWANIA MONITORINGU POBORU MOCY W MASZYNACH ODLEWNICZYCH Z NAPĘDEM ELEKTR. MOŻLIWOŚCI ZASTOSOWANIA MONITORINGU POBORU MOCY W MASZYNACH ODLEWNICZYCH Z NAPĘDEM ELEKTRYCZNYM E. ZIÓŁKOWSKI
MOŻLIWOŚCI ZASTOSOWANIA MONITORINGU POBORU MOCY W MASZYNACH ODLEWNICZYCH Z NAPĘDEM ELEKTR. MOŻLIWOŚCI ZASTOSOWANIA MONITORINGU POBORU MOCY W MASZYNACH ODLEWNICZYCH Z NAPĘDEM ELEKTRYCZNYM E. ZIÓŁKOWSKI
Zasilanie silnika indukcyjnego poprzez układ antyrównoległy
 XL SESJA STUDENCKICH KÓŁ NAUKOWYCH Zasilanie silnika indukcyjnego poprzez układ antyrównoległy Wykonał: Paweł Pernal IV r. Elektrotechnika Opiekun naukowy: prof. Witold Rams 1 Wstęp. Celem pracy było przeanalizowanie
XL SESJA STUDENCKICH KÓŁ NAUKOWYCH Zasilanie silnika indukcyjnego poprzez układ antyrównoległy Wykonał: Paweł Pernal IV r. Elektrotechnika Opiekun naukowy: prof. Witold Rams 1 Wstęp. Celem pracy było przeanalizowanie
(54) Sposób sterowania prędkości obrotowej silnika klatkowego przez przełączanie
 Sposób sterowania prędkości obrotowej silnika klatkowego przez przełączanie") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164000 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 2 8 5 2 3 8 (22) Data zgłoszenia: 1 6.0 5.1 9 9 0 (51) IntCl5: H02P
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164000 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 2 8 5 2 3 8 (22) Data zgłoszenia: 1 6.0 5.1 9 9 0 (51) IntCl5: H02P
Wykład 5. Piotr Sauer Katedra Sterowania i Inżynierii Systemów
 Serwonapędy w automatyce i robotyce Wykład 5 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Prądnica prądu stałego zasada działania e Blv sinαα Prądnica prądu stałego zasada działania Prądnica prądu
Serwonapędy w automatyce i robotyce Wykład 5 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Prądnica prądu stałego zasada działania e Blv sinαα Prądnica prądu stałego zasada działania Prądnica prądu
MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1. Zbigniew Krzemiński, MMB Drives sp. z o.o.
 Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
2.3. Praca samotna. Rys Uproszczony schemat zastępczy turbogeneratora
 E Rys. 2.11. Uproszczony schemat zastępczy turbogeneratora 2.3. Praca samotna Maszyny synchroniczne może pracować jako pojedynczy generator zasilający grupę odbiorników o wypadkowej impedancji Z. Uproszczony
E Rys. 2.11. Uproszczony schemat zastępczy turbogeneratora 2.3. Praca samotna Maszyny synchroniczne może pracować jako pojedynczy generator zasilający grupę odbiorników o wypadkowej impedancji Z. Uproszczony
Ćwiczenie 3 Falownik
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi
 Wydział: EAIiE kierunek: AiR, rok II Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi Grupa laboratoryjna: A Czwartek 13:15 Paweł Górka
Wydział: EAIiE kierunek: AiR, rok II Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi Grupa laboratoryjna: A Czwartek 13:15 Paweł Górka
Laboratorium Elektroniki w Budowie Maszyn
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Z powyższej zależności wynikają prędkości synchroniczne n 0 podane niżej dla kilku wybranych wartości liczby par biegunów:
 Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
SILNIKI ASYNCHRONICZNE INDUKCYJNE
 Temat: SILNIKI ASYNCHRONICZNE INDUKCYJNE Zagadnienia: budowa i zasada działania, charakterystyka mechaniczna, rozruch i regulacja prędkości obrotowej. PODZIAŁ MASZYN ELEKTRYCZNYCH Podział maszyn ze względu
Temat: SILNIKI ASYNCHRONICZNE INDUKCYJNE Zagadnienia: budowa i zasada działania, charakterystyka mechaniczna, rozruch i regulacja prędkości obrotowej. PODZIAŁ MASZYN ELEKTRYCZNYCH Podział maszyn ze względu
Ćwiczenie: "Silnik prądu stałego"
 Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Silniki prądu stałego z komutacją bezstykową (elektroniczną)
") Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Maszyny Elektryczne i Transformatory sem. III zimowy 2012/2013
 Kolokwium główne Wariant A Maszyny Elektryczne i Transformatory sem. III zimowy 2012/2013 Maszyny Prądu Stałego Prądnica bocznikowa prądu stałego ma następujące dane znamionowe: P 7,5 kw U 230 V n 23,7
Kolokwium główne Wariant A Maszyny Elektryczne i Transformatory sem. III zimowy 2012/2013 Maszyny Prądu Stałego Prądnica bocznikowa prądu stałego ma następujące dane znamionowe: P 7,5 kw U 230 V n 23,7
SILNIKI ASYNCHRONICZNE (INDUKCYJNE) KLATKOWE I PIERŚCIENIOWE
 KLATKOWE I PIERŚCIENIOWE") SILNIKI ASYNCHRONICZNE (INDUKCYJNE) KLATKOWE I PIERŚCIENIOWE Najliczniejszą grupę maszyn elektrycznych stanowią silniki elektryczne, szeroko stosowane w przemyśle, komunikacji i transporcie, rolnictwie,
SILNIKI ASYNCHRONICZNE (INDUKCYJNE) KLATKOWE I PIERŚCIENIOWE Najliczniejszą grupę maszyn elektrycznych stanowią silniki elektryczne, szeroko stosowane w przemyśle, komunikacji i transporcie, rolnictwie,
PL B1. POLITECHNIKA GDAŃSKA, Gdańsk, PL BUP 10/16. JAROSŁAW GUZIŃSKI, Gdańsk, PL PATRYK STRANKOWSKI, Kościerzyna, PL
 PL 226485 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226485 (13) B1 (21) Numer zgłoszenia: 409952 (51) Int.Cl. H02J 3/01 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 226485 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226485 (13) B1 (21) Numer zgłoszenia: 409952 (51) Int.Cl. H02J 3/01 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PRACY SILNIKÓW INDUKCYJNYCH
 5. Modelowanie wybranych stanów pracy silników indukcyjnych Fragment monografii autorstwa: Maria Dems, Krzysztof Komęza, Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych, Wyd.
5. Modelowanie wybranych stanów pracy silników indukcyjnych Fragment monografii autorstwa: Maria Dems, Krzysztof Komęza, Modelowanie statycznych i dynamicznych stanów pracy silników indukcyjnych, Wyd.
Badanie trójfazowych maszyn indukcyjnych: silnik klatkowy, silnik pierścieniowy
 Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych CięŜkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie M2 protokół Badanie trójfazowych maszyn indukcyjnych: silnik klatkowy, silnik pierścieniowy
Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych CięŜkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie M2 protokół Badanie trójfazowych maszyn indukcyjnych: silnik klatkowy, silnik pierścieniowy
B. Rozruch silnika przy obniŝonym napięciu
 B. Rozruch silnika przy obniŝonym napięciu Mimo, Ŝe nagłe obniŝenie napięcia często powoduje róŝne problemy, to sterowane obniŝenie napięcia na zaciskach silnika moŝe być korzystne wtedy, gdy stosowane
B. Rozruch silnika przy obniŝonym napięciu Mimo, Ŝe nagłe obniŝenie napięcia często powoduje róŝne problemy, to sterowane obniŝenie napięcia na zaciskach silnika moŝe być korzystne wtedy, gdy stosowane
PL B1. PRZEDSIĘBIORSTWO HAK SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Wrocław, PL BUP 20/14. JACEK RADOMSKI, Wrocław, PL
 PL 224252 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224252 (13) B1 (21) Numer zgłoszenia: 403166 (51) Int.Cl. B66C 13/08 (2006.01) H02K 7/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 224252 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224252 (13) B1 (21) Numer zgłoszenia: 403166 (51) Int.Cl. B66C 13/08 (2006.01) H02K 7/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Elektromagnetyzm. pole magnetyczne prądu elektrycznego
 Elektromagnetyzm pole magnetyczne prądu elektrycznego Doświadczenie Oersteda (1820) 1.Jeśli przez przewodnik płynie prąd, to wokół tego przewodnika powstaje pole magnetyczne. 2.Obecność oraz kierunek linii
Elektromagnetyzm pole magnetyczne prądu elektrycznego Doświadczenie Oersteda (1820) 1.Jeśli przez przewodnik płynie prąd, to wokół tego przewodnika powstaje pole magnetyczne. 2.Obecność oraz kierunek linii
Katedra Elektroniki ZSTi. Lekcja 12. Rodzaje mierników elektrycznych. Pomiary napięći prądów
 Katedra Elektroniki ZSTi Lekcja 12. Rodzaje mierników elektrycznych. Pomiary napięći prądów Symbole umieszczone na przyrządzie Katedra Elektroniki ZSTiO Mierniki magnetoelektryczne Budowane: z ruchomącewkąi
Katedra Elektroniki ZSTi Lekcja 12. Rodzaje mierników elektrycznych. Pomiary napięći prądów Symbole umieszczone na przyrządzie Katedra Elektroniki ZSTiO Mierniki magnetoelektryczne Budowane: z ruchomącewkąi
Trójfazowe silniki indukcyjne. 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu:
 A3 Trójfazowe silniki indukcyjne Program ćwiczenia. I. Silnik pierścieniowy 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu: a - bez oporów dodatkowych w obwodzie wirnika, b - z oporami
A3 Trójfazowe silniki indukcyjne Program ćwiczenia. I. Silnik pierścieniowy 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu: a - bez oporów dodatkowych w obwodzie wirnika, b - z oporami
MAGNETYZM. 1. Pole magnetyczne Ziemi i magnesu stałego.
 MAGNETYZM 1. Pole magnetyczne Ziemi i magnesu stałego. Źródła pola magnetycznego: Ziemia, magnes stały (sztabkowy, podkowiasty), ruda magnetytu, przewodnik, w którym płynie prąd. Każdy magnes posiada dwa
MAGNETYZM 1. Pole magnetyczne Ziemi i magnesu stałego. Źródła pola magnetycznego: Ziemia, magnes stały (sztabkowy, podkowiasty), ruda magnetytu, przewodnik, w którym płynie prąd. Każdy magnes posiada dwa
1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki:
 Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
POLOWO - OBWODOWY MODEL BEZSZCZOTKOWEJ WZBUDNICY GENERATORA SYNCHRONICZNEGO
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 60 Politechniki Wrocławskiej Nr 60 Studia i Materiały Nr 27 2007 maszyny synchroniczne,wzbudnice, modelowanie polowo-obwodowe Piotr KISIELEWSKI
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 60 Politechniki Wrocławskiej Nr 60 Studia i Materiały Nr 27 2007 maszyny synchroniczne,wzbudnice, modelowanie polowo-obwodowe Piotr KISIELEWSKI
6. Narysować wykres fazorowy uproszczony transformatora przy obciąŝeniu (podany będzie charakter obciąŝenia) PowyŜszy wykres jest dla obciąŝenia RL
 PowyŜszy wykres jest dla obciąŝenia RL") TRANSFORMATORY 1. Podać wyraŝenie opisujące wartość skuteczną siły elektromotorycznej indukowanej w uzwojeniu transformatora przy sinusoidalnym przebiegu strumienia magnetycznego. (Pomijając rezystancję
TRANSFORMATORY 1. Podać wyraŝenie opisujące wartość skuteczną siły elektromotorycznej indukowanej w uzwojeniu transformatora przy sinusoidalnym przebiegu strumienia magnetycznego. (Pomijając rezystancję
Badanie napędu z silnikiem bezszczotkowym prądu stałego
 Badanie napędu z silnikiem bezszczotkowym prądu stałego Instrukcja do ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sposobem sterowania 3- pasmowego silnika bezszczotkowego
Badanie napędu z silnikiem bezszczotkowym prądu stałego Instrukcja do ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sposobem sterowania 3- pasmowego silnika bezszczotkowego
Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi
 dr inż. ANDRZEJ DZIKOWSKI Instytut Technik Innowacyjnych EMAG Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi zasilanymi z przekształtników
dr inż. ANDRZEJ DZIKOWSKI Instytut Technik Innowacyjnych EMAG Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi zasilanymi z przekształtników
PROGRAMY I WYMAGANIA TEORETYCZNE DO ĆWICZEŃ W LABORATORIUM NAPĘDOWYM DLA STUDIÓW DZIENNYCH, WYDZIAŁU ELEKTROTECHNIKI I ELEKTRONIKI.
 PROGRAMY I WYMAGANIA TEORETYCZNE DO ĆWICZEŃ W LABORATORIUM NAPĘDOWYM DLA STUDIÓW DZIENNYCH, WYDZIAŁU ELEKTROTECHNIKI I ELEKTRONIKI. Dla ćwiczeń symulacyjnych podane są tylko wymagania teoretyczne. Programy
PROGRAMY I WYMAGANIA TEORETYCZNE DO ĆWICZEŃ W LABORATORIUM NAPĘDOWYM DLA STUDIÓW DZIENNYCH, WYDZIAŁU ELEKTROTECHNIKI I ELEKTRONIKI. Dla ćwiczeń symulacyjnych podane są tylko wymagania teoretyczne. Programy
7 Dodatek II Ogólna teoria prądu przemiennego
 7 Dodatek II Ogólna teoria prądu przemiennego AC (ang. Alternating Current) oznacza naprzemienne zmiany natężenia prądu i jest symbolizowane przez znak ~. Te zmiany dotyczą zarówno amplitudy jak i kierunku
7 Dodatek II Ogólna teoria prądu przemiennego AC (ang. Alternating Current) oznacza naprzemienne zmiany natężenia prądu i jest symbolizowane przez znak ~. Te zmiany dotyczą zarówno amplitudy jak i kierunku
Przetworniki Elektromaszynowe st. n.st. sem. V (zima) 2016/2017
 2016/2017") Kolokwium poprawkowe Wariant A Przetworniki Elektromaszynowe st. n.st. sem. V (zima 016/017 Transormatory Transormator trójazowy ma następujące dane znamionowe: 60 kva 50 Hz HV / LV 15 750 ± x,5% / 400
Kolokwium poprawkowe Wariant A Przetworniki Elektromaszynowe st. n.st. sem. V (zima 016/017 Transormatory Transormator trójazowy ma następujące dane znamionowe: 60 kva 50 Hz HV / LV 15 750 ± x,5% / 400
LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH
 -CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
-CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
Podstawowe uszkodzenia silników indukcyjnych, ich objawy i sposoby usuwania.
 Podstawowe uszkodzenia silników indukcyjnych, ich objawy i sposoby usuwania. Objawy uszkodzenia Możliwe przyczyny Sposoby wykrycia i przyczyny Uszkodzona linia zasilająca Spalony bezpiecznik Sprawdzić
Podstawowe uszkodzenia silników indukcyjnych, ich objawy i sposoby usuwania. Objawy uszkodzenia Możliwe przyczyny Sposoby wykrycia i przyczyny Uszkodzona linia zasilająca Spalony bezpiecznik Sprawdzić
Układy rozruchowe silników indukcyjnych klatkowych
 Ćwiczenie 7 Układy rozruchowe silników indukcyjnych klatkowych 7.1. Program ćwiczenia 1. Wyznaczenie charakterystyk prądu rozruchowego silnika dla przypadków: a) rozruchu bezpośredniego, b) rozruchów przy
Ćwiczenie 7 Układy rozruchowe silników indukcyjnych klatkowych 7.1. Program ćwiczenia 1. Wyznaczenie charakterystyk prądu rozruchowego silnika dla przypadków: a) rozruchu bezpośredniego, b) rozruchów przy
Badanie transformatora
 Ćwiczenie E9 Badanie transformatora E9.1. Cel ćwiczenia Transformator składa się z dwóch uzwojeń, umieszczonych na wspólnym metalowym rdzeniu. W ćwiczeniu przykładając zmienne napięcie do uzwojenia pierwotnego
Ćwiczenie E9 Badanie transformatora E9.1. Cel ćwiczenia Transformator składa się z dwóch uzwojeń, umieszczonych na wspólnym metalowym rdzeniu. W ćwiczeniu przykładając zmienne napięcie do uzwojenia pierwotnego
Temat XXIV. Prawo Faradaya
 Temat XXIV Prawo Faradaya To co do tej pory Prawo Faradaya Wiemy już, że prąd powoduje pojawienie się pola magnetycznego a ramka z prądem w polu magnetycznym może obracać się. Czy z drugiej strony można
Temat XXIV Prawo Faradaya To co do tej pory Prawo Faradaya Wiemy już, że prąd powoduje pojawienie się pola magnetycznego a ramka z prądem w polu magnetycznym może obracać się. Czy z drugiej strony można
Układy rozruchowe gwiazda - trójkąt od 7,5kW do 160kW
 UKŁADY GWIAZDA - TRÓJKĄT I REWERSYJNE Układy rozruchowe gwiazda - trójkąt od 7,5kW do 160kW Gotowe układy rozruchowe gwiazda - trójkąt do bezpośredniego montażu Znamionowy prąd AC3 / 400V: od 16A do 300A
UKŁADY GWIAZDA - TRÓJKĄT I REWERSYJNE Układy rozruchowe gwiazda - trójkąt od 7,5kW do 160kW Gotowe układy rozruchowe gwiazda - trójkąt do bezpośredniego montażu Znamionowy prąd AC3 / 400V: od 16A do 300A
5. STANY PRACY NAPĘDU Z MASZYNĄ OBCOWZBUDNĄ PRĄDU STAŁEGO
 5. STANY PRACY NAPĘDU Z MASZYNĄ OBCOWZBUDNĄ PRĄDU STAŁEGO 5.1. Program ćwiczenia Badanie charakterystyk mechanicznych maszyny przy zasilaniu stałym napięciem Badanie wpływu rezystancji obwodu twornika
5. STANY PRACY NAPĘDU Z MASZYNĄ OBCOWZBUDNĄ PRĄDU STAŁEGO 5.1. Program ćwiczenia Badanie charakterystyk mechanicznych maszyny przy zasilaniu stałym napięciem Badanie wpływu rezystancji obwodu twornika
Lekcja 173, 174. Temat: Silniki indukcyjne i pierścieniowe.
 Lekcja 173, 174 Temat: Silniki indukcyjne i pierścieniowe. Silnik elektryczny asynchroniczny jest maszyną elektryczną zmieniającą energię elektryczną w energię mechaniczną, w której wirnik obraca się z
Lekcja 173, 174 Temat: Silniki indukcyjne i pierścieniowe. Silnik elektryczny asynchroniczny jest maszyną elektryczną zmieniającą energię elektryczną w energię mechaniczną, w której wirnik obraca się z
Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu
 Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu Przedmiot: Pomiary Elektryczne Materiały dydaktyczne: Pomiar i regulacja prądu i napięcia zmiennego Zebrał i opracował: mgr inż. Marcin Jabłoński
Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu Przedmiot: Pomiary Elektryczne Materiały dydaktyczne: Pomiar i regulacja prądu i napięcia zmiennego Zebrał i opracował: mgr inż. Marcin Jabłoński
MAGNETYZM, INDUKCJA ELEKTROMAGNETYCZNA. Zadania MODUŁ 11 FIZYKA ZAKRES ROZSZERZONY
 MODUŁ MAGNETYZM, INDUKCJA ELEKTROMAGNETYCZNA OPRACOWANE W RAMACH PROJEKTU: FIZYKA ZAKRES ROZSZERZONY WIRTUALNE LABORATORIA FIZYCZNE NOWOCZESNĄ METODĄ NAUCZANIA. PROGRAM NAUCZANIA FIZYKI Z ELEMENTAMI TECHNOLOGII
MODUŁ MAGNETYZM, INDUKCJA ELEKTROMAGNETYCZNA OPRACOWANE W RAMACH PROJEKTU: FIZYKA ZAKRES ROZSZERZONY WIRTUALNE LABORATORIA FIZYCZNE NOWOCZESNĄ METODĄ NAUCZANIA. PROGRAM NAUCZANIA FIZYKI Z ELEMENTAMI TECHNOLOGII