Spis tre 1. Przedstawienie standardu 1-wire Dokumentacja układu DS18B Obsługa termometru DS18B20 w j
|
|
|
- Halina Murawska
- 9 lat temu
- Przeglądów:
Transkrypt
1 OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20 wydanie pierwsze Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków

2 Spis treści 1. Przedstawienie standardu 1-wire... str Dokumentacja układu DS18B20... str Obsługa termometru DS18B20 w języku C... str Podsumowanie... str Bibliografia... str. 20 DODATEK Podstawowe operacje bitowe... str. 20 2

3 1. Przedstawienie standardu WPROWADZENIE 1-Wire jest rodzajem interfejsu elektronicznego jak również i protokołu komunikacyjnego pomiędzy dwoma (lub więcej) urządzeniami. Jego nazwa wywodzi się stąd, że do całkowitej komunikacji używana jest tylko jedna linia danych. Dodatkowo, odbiornik może być zasilany bezpośrednio z linii danych, wykorzystując zasilanie pasożytnicze, co jest ogromną zaletą tego interfejsu. Odbiornik wyposażony jest bowiem w kondensator o pojemności 800 pf, który jest ładowany bezpośrednio z linii danych - następnie energia w nim zgromadzona używana jest do zasilania odbiornika. Połączenie 1-Wire zostało opracowane przez Dallas Semiconductor. Umożliwia ono stosunkowo niewielką przepustowość transmisji danych - standardowo 16 kbps (w trybie overdrive maksymalnie do 142 kbps). 1-Wire jest podobne do interfejsu I²C, ale z uwagi na pojedynczą linię komunikacyjną jest zarówno wolniejsze, jak i tańsze. Interfejs 1-Wire jest zazwyczaj używany do komunikacji pomiędzy niewielkimi urządzeniami, takimi jak: termometry cyfrowe, instrumenty metrologiczne, sterowniki ładowania akumulatorów, zamki elektroniczne typu ibutton, itd. Protokół 1-wire zakłada wspólną linię danych dla układów master i slave 2. DOKUMENTACJA UKŁADU DS18B20 Układ firmy Dallsa Semiconductors DS18B20 jest cyfrowym termometrem o programowalnej rozdzielczości. Jego podstawowe cechy to: o o o o o o komunikacja za pomocą interfejsu 1-wire, każdy odbiornik posiada unikalny 64 bitowy kod umieszczony w wewnętrznej pamięci ROM układu, maksymalnie uproszczony sposób odczytu temperatury, nie potrzebuje żadnych zewnętrznych komponentów, może być zasilany z linii danych, zasilanie od 3V do 5,5V, 3

4 o dokładność 0,5 o C dla zakresu -10 o C 85 o C, o możliwość ustawienia rozdzielczości od 9 do 12 bitów, o konwersja 12 bitowego słowa max. 750ms. Rysunek poniżej przedstawia budowę logiczną układu DS18B20. Pamięć ROM 64-bitowa zawiera unikalny adres układu. Scratchpad (notatnik) zawiera 2 bajtowy rejestr z wartością temperatury dostarczoną cyfrowo z czujnika. W dodatku, scratchpad zapewnia dostęp do jedno-bajtowego rejestru porównań (T H i T L ) oraz do jedno-bajtowego rejestru konfiguracyjnego. Rejestr konfiguracyjny pozwala na ustawienie rozdzielczości konwersji temperatury (9, 10, 11 lub 12 bitów). T H, T L oraz rejestry konfiguracyjne są typu EEPROM, dlatego ich zawartość nie zmienia się po wyłączeniu zasilania. Układ DS18B20 korzysta z magistrali oraz protokołu 1-Wire opisującego komunikację przy użyciu tylko jednej linii sygnałowej. Linia ta potrzebuje rezystora podciągającego (pullup). Dla takiej magistrali, mikroprocesor rozpoznaje i adresuje urządzenia używając unikalnych 64- bitowych kodów (tzw. kod ROM). Każde urządzenia ma swój własny unikalny kod, dlatego ilość urządzeń możliwych do zaadresowania w wirtualnej magistrali jest praktycznie nieograniczona. Jedną z cech układu DS18B20 jest możliwość obsługi bez zewnętrznego źródła zasilania. Mówi się tutaj o tzw. zasilaniu pasożytniczym. POMIAR TEMPERATURY Podstawową zaletą układu DS18B20 jest cyfrowe przedstawienie temperatury. Rozdzielczość czujnika jest konfigurowalna przez użytkownika: 9, 10, 11 lub 12 bitów, odpowiadające odpowiednio dokładnościom 0.5 o C, 0.25 o C, o C, 0,0625 o C. Ustawienia domyślne to 12 bitów. Aby zainicjować tryb pomiaru temperatury i przeprowadzić konwersję A-C, układ master musi wysłać polecenie Convert T (0x44). Po konwersji, wynik jest przechowywany w dwu-bajtowym rejestrze w pamięci scratchpada, zaś układ slave odpowiada na to przechodząc w stan bezczynności. Jeśli DS18B20 jest zasilany z zewnętrznego źródła, wtedy po konwersji master może zapytać o read time slots, zaś czujnik powinien odpowiedzieć, przez wysłanie zera (kiedy jest w trakcie konwersji) lub jedynki (kiedy konwersja się zakończyła). W trybie pracy pasożytniczym nie jest możliwa taka opcja. Wyjściowa temperatura jest wyskalowana w stopniach Celcjusza. Dane o temperaturze przechowywane są jako 16-bitowe rozszerzone o znak, dwie uzupełniające się liczby w rejestrze temperature register. 4
 oraz do jedno-bajtowego rejestru konfiguracyjnego.")
5 Bit znaku (S) sygnalizuje, czy temperatura jest dodatnia (S=0), czy ujemna (S=1). Jeśli DS18B20 jest ustawiony na 12-bitową rozdzielczość, wszystkie bity w rejestrze zawierają dane. Dla 11-bitowego trybu, bit 0 jest niezdefiniowany. Dla 10-bitowej rozdzielczości bity 0, 1 są niezdefiniowane, zaś dla 9-bitowej, bity: 2, 1, 0. Poniżej znajduje się przykładowa tabela z różnymi temperaturami (rozdzielczość 12-bitów). PORÓWNANIE TEMPERATURY Po wykonaniu przez układ konwersji temperatury, wartość temperatury jest porównywana z wartością zdefiniowaną przez użytkownika poprzez ustawienie wartości w rejestrze 1- bajtowym T H i T L. Bit znaku (S) sygnalizuje znak otrzymanej wartości. Jeśli jest dodatnia (S=0), zaś ujemna (S=1). Rejestr ten jest pamięcią typu EEPROM, dlatego ustawienia nie są kasowane po odłączeniu zasilania. Tylko zakres od jedenastego do czwartego bitu z rejestru temperature register jest używanych przy porównaniu. Jeśli mierzona temperatura jest niższa niż zadeklarowane T L lub wyższa niż T H ustawiana jest flaga alarmu. Flaga ta jest aktualizowana po każdym pomiarze. Master może sprawdzić status flagi alarmu przez wysłanie polecenia Alarm Search (0xEC). 64-BITOWY KOD Każdy układ DS18B20 posiada unikalny 64-bitowy numer umieszczony w pamięci ROM. Osiem najmłodszych bitów dla tego typu układów to kod 0x28. Następne 48 bitów zawiera unikalny numer. Osiem najstarszych bitów zawiera CRC obliczone z pierwszych 56 bitów kodu. 5

6 PAMIĘĆ UKŁADU Powyżej znajduje się schemat przedstawiający pamięć układu DS18B20. Widoczny jest podział na pamięć ulotną i trwałą. W pamięci trwałej (EEPROM) znajdują się rejestry konfiguracyjne oraz T H i T L. Jeśli nie są używane funkcje alarmu, rejestry T H i T L mogą służyć jako ogólna pamięć. Bajty 0 i 1 w scratchpadzie zawierają rejestry pomiaru temperatury. Te bajty służą wyłącznie do odczytu. Bajty 2, 3 zapewniają dostęp do rejestrów T H i T L. Bajt 4 zawiera informacje o konfiguracjach. Bajty 5, 6, 7 są zarezerwowane do wewnętrznego użycia przez urządzenie i nie mogą być kasowane. Odczyt ich powoduje zwrócenie wartości jeden. Bajt 8 w scratchpadzie służy wyłącznie do odczytu i zawiera wyliczone CRC z bajtów od 0 do 7 ze scratchpadu. Dane zapisywane są do bajtów 2, 3, 4 wymagają użycia komendy Write ScratchPad (0x4E). Dane muszą być wysłane do DS18B20 rozpoczynając od najmłodszego bitu od bajtu 2. Aby zweryfikować poprawność danych możliwe jest odczytanie scratchpadu (Read Scratchpad 0xBE) po zapisaniu danych. Kiedy odczytywany jest scratchpad, dane przesyłane są magistralą począwszy od najmłodszego bitu od bajtu nr 0. Aby przesłać dane konfiguracyjne oraz T H, T L, ze scratchpadu do pamięci EEPROM master musi użyć polecenia Copy Scratchpad (0x48). Dane z EEPROM mogą być również skopiowane do scratchpadu korzystając z polecenia Recall E 2 (0xB8). Po wysłaniu tego żądania, master może zarządzić read time slots, DS18B20 zasygnalizuje wtedy swój status. Jeśli procedura Recall jest wykonywana zwróci zero, jeśli zakończyła się wtedy jedynkę. CONFIGURATION REGISTER Czwarty bajt ze scratchpadu zawiera rejestr konfiguracji, którego organizację przedstawiono poniżej. Możliwe jest ustawienie rozdzielczości pomiaru używając bitów R0 i R1 w tym rejestrze. Ustawienia domyślne zakładają R0=1, R1=1 (12 bitowa rozdzielczość). Trzeba zaznaczyć, że istnieje zależność pomiędzy rozdzielczością a czasem konwersji. Bit 7 oraz bity 0..4 są zarezerwowane do wewnętrznego użytku przez urządzenie i nie powinny być kasowane. Poniżej przedstawiono możliwe ustawienia bitów R0, R1, wraz z szybkością konwersji. 6

7 GENERATOR CRC Bajty CRC (Cyclic Redudancy Check) dostarczane są wraz z 64-bitowym kodem oraz w dziewiątym bajcie z pamięci scratchpada. CRC z pamięci ROM wyznaczany jest z pierwszych 56-bitów kodu i jest zawarte w najstarszym bajcie ROM. Z kolei CRC scratchpada liczone jest z danych umieszczonych w nim, oczywiście wraz ze zmianą zawartości scratchpada zmienia się również CRC. Bajt CRC dostarczany jest do układu mastera, celem sprawdzenia poprawności transmisji. Układ nadrzędny po otrzymaniu wiadomości z bajtem CRC, oblicza CRC tej wiadomości i porównuje z dostarczonym CRC. Poniżej znajduje się sposób liczenia wielomianu CRC: Master oblicza CRC korzystając z zamieszczonego schematu. Obwód ten zawiera rejestry przesuwne oraz bramki XOR. Zaczynając od najmłodszego bitu z kodu ROM lub najmłodszego bitu od bajtu nr 0 ze scratchpadu, po jednym bicie następuje przesuwanie do rejestrów. Po przesunięciu 56-stego bitu z ROM lub najstarszego bitu z bajtu 7 ze scratchpada, generator wielomianu zatrzymuje przeliczanie CRC. Następne 8 bitów kodu ROM lub CRC scratchpadu powinno być wysłane do obwodu. Jeśli przeliczenie CRC nastąpiło prawidłowo, rejestr przesuwny powinien zawierać zera. MAGISTRALA 1-WIRE Magistrala 1-Wire używana jest w wypadku jednego układu nadrzędnego i wielu urządzeń podrzędnych. Układ DS18B20 jest zawsze układem podrzędnym (Slave). Wszystkie dane i komendy przesyłane są od najmłodszego do najstarszego bitu. KONFIGURACJA SPRZĘTOWA Magistrala 1-Wire definiowana jest jako jednoprzewodowa. Wszystkie urządzenia komunikują się z linią danych przez otwarty dren lub trójstanowy port. Takie założenia pozwalają na stwierdzenie kiedy nie transmitowane są dane magistralą, tym samym kiedy magistrala może być dostępna do użytku przez inne urządzenie. Port danych układu DS18B20 (DQ) jest typu otwarty dren. Magistrala 1-Wire potrzebuje zewnętrznego podciągnięcia rezystorem do zasilania (ok. 5kΩ). TRANSMISJA DANYCH Wymiana danych pomiędzy układem nadrzędnym a układem DS18B20 odbywa się w następującej kolejności: inicjalizacja, komendy ROM, funkcje. Należy przestrzegać tej kolejności, bo w przeciwnym wypadku układ może nie odpowiadać na wysłane informacje. Wyjątkami od tych reguł są komendy Search ROM oraz Alarm SEARCH. Po użyciu tych komend, master musi wrócić do kroku pierwszego podanej sekwencji. 7

8 INICJALIZACJA Każda transmisja na magistrali musi zacząć się sekwencją inicjalizującą. Sekwencja ta zawiera impuls RESET PULSE wysłany przez układ nadrzędny a następnie impuls wysłany przez układ podrzędny PRESENCE PULSE. ROM COMMANDS Po wykryciu przez układ nadrzędny PRESENCE PULSE, możliwa jest obsługa komend ROM. Poniżej przedstawione są możliwe komendy. SEARCH ROM (0xF0) W momencie kiedy załączane jest zasilanie, układ Master musi zidentyfikować kody ROM wszystkich urządzeń podrzędnych na magistrali. Umożliwia to określenie ilości i rodzajów układów Slave. Jeśli na magistrali znajduje się tylko jeden układ podrzędny, możliwe jest pominięcie wykonywanie Search ROM, można skorzystać z komendy Read ROM. READ ROM (0x33) Komenda ta może być użyta tylko w wypadku istnienia jednego układu Slave na magistrali 1- Wire. Wywołanie jej powoduje odczyt kodu ROM z układu podrzędnego. MATCH ROM (0x55) Komenda ta wywoływana jest celem zaadresowania układu podrzędnego. Na to wywołanie powinien odpowiedzieć jedynie układ podrzędny o kodzie wysyłanym ROM. Ewentualne, inne układy podrzędne powinny czekać na RESET PULSE. SKIP ROM (0xCC) Układ nadrzędny może używać tej komendy po to aby zaadresować wszystkie urządzenia na magistrali równocześnie, z pominięciem wysłania jakiegokolwiek kodu ROM. Za przykład, można podać sytuację w której Master chce aby we wszystkich układach DS18B20 znajdujących się na magistrali włączona została konwersja temperatura zatem należy użyć komendy Skip ROM, po którym następuje komenda Convert T (0x44). ALARM SEARCH (0xEC) Działanie tej komendy jest identyczne z komendą Search ROM, tyle, że w tym wypadku na wywołanie odpowiadają tylko układy Slave z ustawioną flagą alarmu. Komenda ta pozwala układowi Master ustalić, który z układów DS18B20 na magistrali w czasie konwersji temperatury napotkał na stan alarmu. Po każdym cyklu Alarm Search, układ Master musi powrócić do pierwszego kroku sekwencji obsługi. FUNCTION COMMANDS Po wysłaniu na magistralę komendy ROM celem zaadresowania układu DS18B20, Master może wydać jedną z komend funkcji. Komedy te pozwalają układowi nadrzędnemu zapisywać i odczytywać pamięć scratchpada, inicjować konwersje temperatury oraz ustawiać odpowiedni tryb zasilania układu. Poniższa tabela ilustruje wszystkie te funkcje. 8
 W momencie kiedy załączane jest zasilanie, układ Master musi zidentyfikować kody ROM wszystkich urządzeń podrzędnych na magistrali.")
9 CONVERT T (0x44) Komenda ta inicjalizuje pojedynczą konwersję temperatury. Po zakończeniu konwersji, jej rezultat jest przechowywany w dwu-bajtowym rejestrze w pamięci scratchpada, zaś układ DS18B20 przechodzi w stan bezczynności. Jeśli urządzenie jest obsługiwane w trybie zasilania pasożytniczego, pomiędzy przedziałem czasu 10µs, po wydaniu tej komendy, Master musi aktywować podciągnięcie magistrali. Jeśli z kolei DS18B20 zasilany jest z zewnętrznego źródła, Master może wysłać read time slots. Jeśli odbierze od układu Slave wartość zero oznacza to, że układ jest w trakcie konwersji, zaś jeśli odbierze jeden to układ zakończył konwersję. WRITE SCRATCHPAD (0x4E) Komenda ta pozwala zapisać 3 bajty danych do układu DS18B20. Pierwszy bajt zapisywany jest do rejestru T H (bajt nr 2 w scratchpadzie), drugi do rejestry T L (bajt nr 3 w scratchpadzie), zaś trzeci do rejestru konfiguracyjnego. Dane muszą być przesłane od najmłodszego do najstarszego bitu. Wszystkie 3 bajty muszą być zapisane przed wydaniem przez układ master polecenia reset. W innym wypadku dane mogą zostać uszkodzone. READ SCRATCHPAD (0xBE) Komenda ta pozwala układowi Master odczytać dane umieszczone w pamięci scratchpada. Transmisja danych rozpoczyna się od najmłodszego bitu, od bajtu nr 0 i kontynuowana jest aż do dziewiątego bajtu. Układ Master może wysłać żądanie reset aby zakończyć odczyt w dowolnym momencie. COPY SCRATCHPAD (0x48) Komenda ta pozwala na skopiowanie danych z rejestrów T H, T L oraz konfiguracyjnego (bajty 2, 3 i 4) do pamięci EEPROM. Jeśli urządzenie używa zasilania pasożytniczego należy zadbać o to, aby w przeciągu 10µs, układ Master podciągnął magistralę. RECALL E 2 (0xB8) Komenda ta wywołuje alarmy wartości T H, T L oraz konfiguracyjne z pamięci EEPROM i umiejscawia je na pozycjach 2, 3, 4 w pamięci scratchpada. Master może wysłać polecenie read time slots, celem sprawdzenia postępu komendy RECALL. Jeśli zostanie zwrócona wartość zero, oznacza to, że wykonywanie funkcji trwa, zaś jeden, że funkcja została 9

10 wykonana. Operacja RECALL jest wykonywana automatycznie po podłączeniu zasilania do układu. READ POWER SUPPLY (0xB4) Układ Master może zażądać (poprzez wysłanie read time slots) odpowiedzi, który układ DS18B20 umieszczony na magistrali korzysta z zasilania pasożytniczego. Podczas read time slot, układy zasilane pasożytniczo powinny ustawić magistralę w poziom niski, zaś zasilane zewnętrznie powinny podciągnąć ją do stanu wysokiego. PROTOKÓŁ 1-WIRE DS18B20 używa protokołu komunikacyjnego 1-Wire. Protokół definiuje rodzaje sygnałów takich jak: RESET PULSE, PRESENCE PULSE, zapis 0, zapis 1, odczyt 0, odczyt 1. Master magistrali wysyła wszystkie te sygnały oprócz PRESENCE PULSE. INICJALIZACJA: RESET PULSE, PRESENCE PULSE Każda transmisja rozpoczyna się sekwencją inicjalizacyjną zawierającą impuls resetu RESET PULSE wysyłany z Mastera, po którym następuje impuls przedstawienia się PRESENCE PULSE wysyłany przez układ DS18B20. W momencie kiedy DS18B20 wysyła PRESENCE PULSE w odpowiedzi na reset, sygnalizuje to układowi Master, że DS jest gotowy do obsługi. Podczaj sekwencji inicjalizacji, Master wysyła reset przez ustawienie linii danych w stan niski przez minimum 480µs. Po tym zabiegu Master zwalnia magistralę i przechodzi w tryb odbiornika. Kiedy magistrala jest zwolniona, rezystor 5kΩ podciąga linie 1-Wire do stanu wysokiego. Kiedy DS18B20 wykryje narastające zbocze, odczeka 15-60µs a następnie wyśle impuls PRESENCE PULSE, poprzez ustawienie magistrali w stanie niskim przez µs. Poniższy schemat przedstawia sposób inicjalizacji. PRZEDZIAŁY CZASOWE ZAPIS/ODCZYT Master zapisuje dane do układu DS18B20 podczas trwania tzw. write time slots, odczyt z kolei następuje w czasie trwania read time slots. Podczas każdego takiego przedziału czasowego jeden bit danych jest wysyłany lub odbierany przez magistralę. WRITE TIME SLOTS Wyróżnia się dwa rodzaje write time slots: Write 1 time slots oraz Write 0 time slots. Master używa Write 1 time slot, kiedy zapisuje logiczną jedynkę do układu DS18B20, zaś Write 0 time slot w momencie zapisywania zera logicznego. Wszystkie te przedziały czasowe powinny trwać minimum 60µs z minimalnym okresem 1µs pomiędzy indywidualnymi write slots. 10

11 Aby zapisać jeden do układu DS18B20, po ustawieniu magistrali w stan niski, Master powinien zwolnić magistralę w przeciągu 15µs. Kiedy magistrala jest zwolniona, rezystor podciąga linie danych do stanu wysokiego. Z kolei aby wygenerować Write 0 time slot, po ustawieniu magistrali w stan niski, Master powinien kontynuować trzymanie magistrali w stanie niskim, przez okres najmniej 60µs. Po tym jak Master zainicjuje write time slot, DS18B20 sprawdza poziom magistrali, oknami czasowymi o szerokości 15µs - 60µs. Jeśli poziom magistrali jest wysoki w momencie próbkowania, wtedy zapisywana jest jedynka do układu DS18B20. Z kolei jeśli poziom magistrali jest niski, zapisywane jest zero do układu. READ TIME SLOTS Układ DS18B20 może wysyłać dane do układu Master tylko w momencie, kiedy układ Master wygeneruje read time slot. Należy zaznaczyć, że Master musi wygenerować read time slot natychmiast po wydaniu instrukcji Read Scratchpad (0xBE), Read Power Supply (0xB4), ConverT (0x44), Recall E 2 (0xB8). Każdy read time slots musi trwać co najmniej 60µs z przerwami minimum 1µs pomiędzy poszczególnymi read time slots. Takie okno czasowe jest inicjowane przez układ Master, przez ustawienie magistrali 1-Wire w stan niski przez minimum 1µs a następnie zwolnienie magistrali. Po inicjacji układ DS18B20 zaczyna generować dane na magistralę (zera lub jedynki). Zera transmitowane są przez ustawienie magistrali w stanie niskim, zaś jedynki poprzez podciągnięcie jej do stanu wysokiego. Kiedy transmitowane jest zero, DS18B20 11

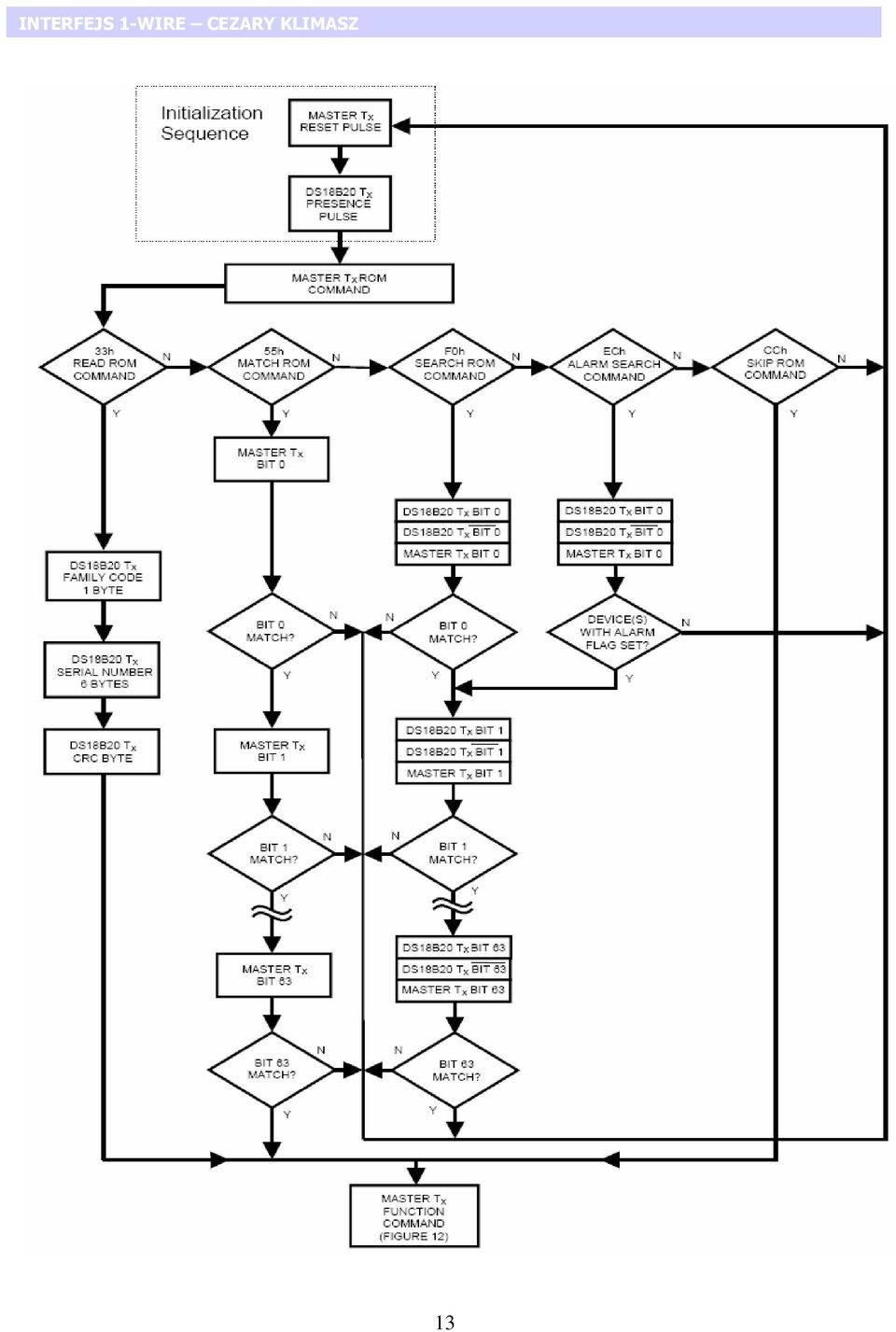
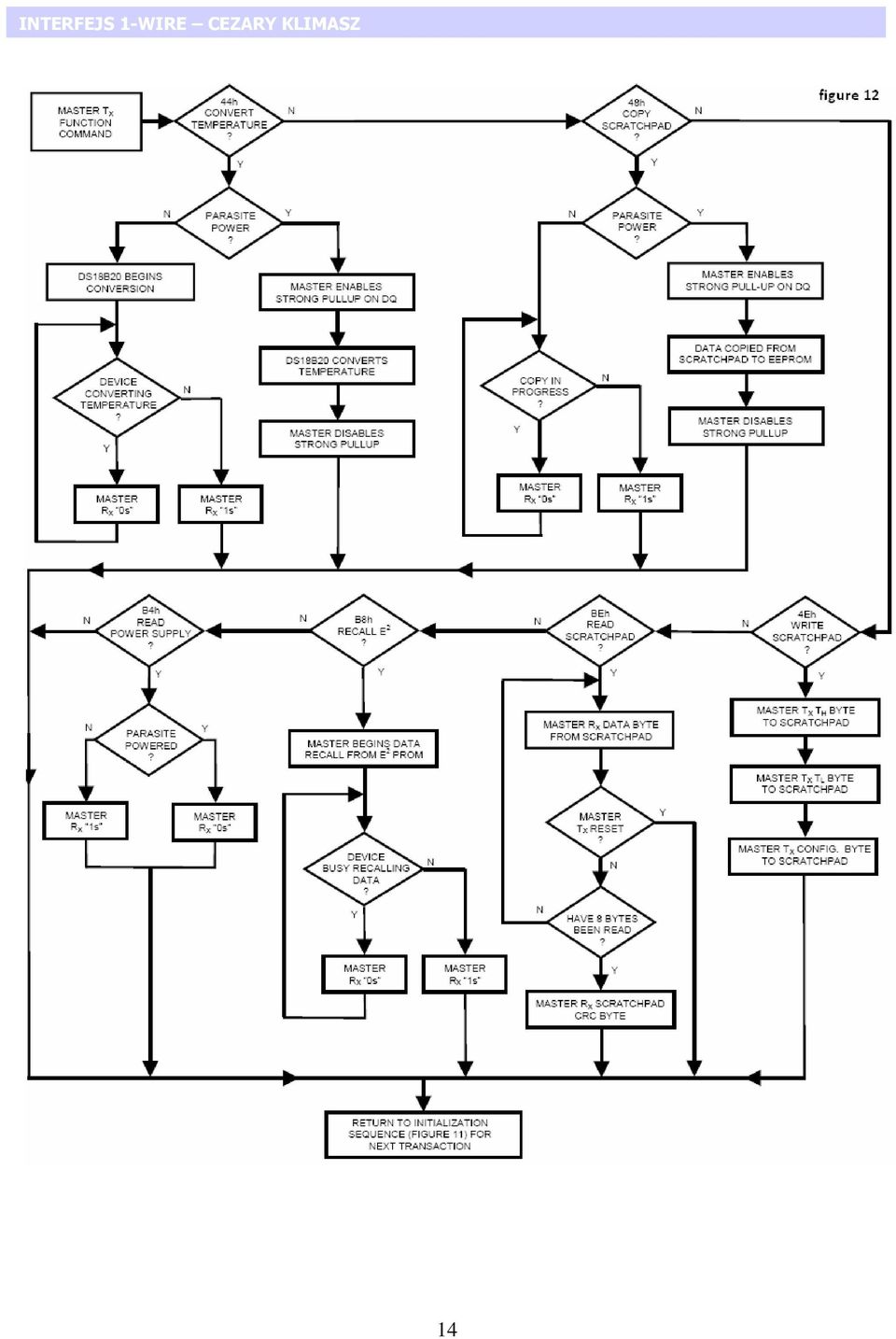
12 zwalnia magistralę po zakończeniu time slot a, a następnie magistrala jest podciągana w stan wysoki przez rezystor podciągający. Dane wyjściowe są dostępne przez 15µs po zboczu opadającym, które inicjowało read time slot. Trzeba dodać, że Master musi zwolnić magistralę i próbkować jej stan na przestrzeni tych 15µs od czasu wygenerowania read time slot. Poniżej przedstawione są szczegółowe oraz polecane sposoby inicjowania i odczytu danych przez układ Master. Z dokumentacji układu DS18B20 zaczerpnięto poniższy przykład obsługi termometru. W przykładzie tym układ zasilany jest napięciem pasożytniczym. Master inicjalizuje konwersję temperatury, odczytuje pamięć scratchpada i oblicza CRC aby zweryfikować odebrane dane. Powyższa tabela jest jednym ze sposobów odczytu temperatury. Trzeba zaznaczyć, że jest to kompletny kod do odczytu pamięci scratchpada. Nie zawsze konieczny jest odczyt jak w tym wypadku wszystkich 9 bajtów oraz odczytywania kodu termometru. Kiedy mamy do czynienia tylko z jednym termometrem na magistrali, możemy ominąć odczytywanie kodu ROM poprzez wysłanie funkcji SKIP ROM. Odczyt temperatury możemy zakończyć w momencie odczytania dwóch pierwszych bajtów które w pamięci scratchpada zawierają 16 bitową informację o temperaturze. Poniżej przedstawiono schemat blokowy obsługi układu termometru. 12

13 13
14 14
15 4. Obsługa termometru DS18B20 w języku C (1) Podstawowe zagadnienia obsługi termometru cyfrowego DS18B20 bazują na opisie katalogowym tego układu. Wysyłanie i odbieranie danych odbywa się za pomocą ustawiania stanu magistrali lub detekcji tego stanu przez układ Master. Układ DS18B20 pracuje tylko w trybie Slave. Implementacja programowa obsługi tego układu opiera się o stworzenie odpowiednich procedur ustawiających linie danych w stan wysoki i niski w odpowiednich przedziałach czasowych, jak i detekcje tych stanów (nasłuchiwanie przez Mastera). Program pokazujący możliwości układu DS18B20 będzie miał za zadanie w sposób najprostszy i najszybszy wyświetlić temperaturę. Założono, że układ będzie zasilany zewnętrznie. Środowisko programowania to WinAVR wykorzystujące kompilator GCC. Poniżej przedstawiono ustawienia bibliotek, makr i zmiennych globalnych. (2) Biblioteka lcd.h jest to biblioteka z pakietu rklibavr. Jeśli chodzi o makra, to założono, że linia danych będzie znajdowała się na pinie 0 portu D. Makra SET_1Wire oraz CLEAR_1Wire będą użyteczne w wypadku ustawiania magistrali w odpowiedni poziom. Poniższy kod przedstawia wysłanie impulsu RESET oraz oczekiwanie na impuls PRESENCE. Wszystkie czasy zawarte w powyższym kodzie wynikają z dokumentacji technicznej wysyłania i odbierania impulsu RESET i PRESENCE. Według dokumentacji układ Master powinien ustawić linie w stan niski na czas min. 480µs, następnie ustawić w poziom wysoki i oczekiwać na reakcje ze strony układu termometru. Układ termometru w momencie wykrycia impulsu RESET powinien wysłać na magistralę swój impuls PRESENCE, polegający na ustawienie magistrali w stan niski przez µs a następnie podciągnięcie w stan wysoki. Master ma zadanie wykryć tą sekwencję. W wypadku wykrycia zwraca do funkcji wartość jeden, w innym 15
. Program pokazujący możliwości układu DS18B20 będzie miał za zadanie w sposób najprostszy i najszybszy wyświetlić temperaturę.")
16 (3) przypadku zero. Poniższa funkcja ilustruje sposób wysłania pojedynczego bitu do układu DS18B20. (4) Wysłanie bitu polega na ustawieniu magistrali w stan niski, następnie jeśli po czasie min. 1µs zostanie ona ustawiona w stan wysoki, równoznaczne jest to z wysłaniem jedynki. Jeśli z kolei po wyczyszczeniu magistrali nie nastąpi w określonym czasie podciągnięcie jej do jedynki to uznaje się to za wysłanie zera logicznego. Czasy sprecyzowane są w opisie katalogowym. Poniżej zaprezentowano funkcję odbierającą pojedyncze bity z magistrali. Odczyt bitu z magistrali polega na wysłaniu read time slot a następnie sprawdzeniu zmian na magistrali. Funkcja zwraca jedynkę lub zero w zależności od stanu logicznego magistrali. Kiedy mamy już podstawowe funkcje obsługi układu DS18B20 pozwalające na komunikację z nim, należy stworzyć funkcje ułatwiające operowanie na wysyłaniu i odbieraniu większej ilości danych. Kolejną zaprezentowaną funkcją, będzie funkcja wysyłająca jeden bajt danych. Sposób jej realizacji opiera się na ośmiokrotnym wysłaniu pojedynczego bitu na magistralę z odpowiednimi odstępami czasowymi. Poniżej zaprezentowano tą funkcję. 16

17 (5) (6) Pętla for() odpowiada za ośmiokrotne wysłanie pojedynczego bitu danych. Operacje bitowe pozwalają na przesuwania bitów i wyodrębnienie właściwego do wysłania. Kolejną funkcją jest funkcja odbierającą bajt danych. Została zrealizowana analogicznie do funkcji wysyłającej bajt. Funkcja powyższa nie wymaga komentarza. W dodatku na końcu opracowania znajdują się wytłumaczone podstawowe operacje bitowe wraz z przykładami. Po stworzeniu funkcji wysyłających i odbierających pojedyncze bajty wystarczy analizując dokumentację oraz schemat blokowy obsługi DS18B20 odebrać informację na temat temperatury. Inicjację zawsze rozpoczyna RESET PULSE, w naszym wypadku odpowiada za to funkcja RESET_PULSE(). Zwraca ona wartość jeden w momencie odebrania PRESENCE PULSE z układu termometru. Kiedy mamy pewność, że na magistrali znajduje się układ termometru powinniśmy poprosić o kod ROM układu. Nie jest to konieczne w wypadku pojedynczego układu Slave na magistrali. Używamy zatem komendy Skip ROM (0xCC). W kolejnym punkcie powinniśmy włączyć konwersję temperatury ConverT (0x44). Konwersja trwa min. 750ms dla rozdzielczości 12 bitowej (fabryczne ustawienia). Analizując schemat obsługi układu kolejnym krokiem jest wysłanie impulsu RESET, następnie komendy READ SCRATCHPAD (0xBE). Po tej komendzie można zacząć odbierać bajty z pamięci scratchpadu. Nas interesują tylko dwa pierwsze bajty, zawierające informację o temperaturze. Po ich odebraniu można zwolnić magistralę. Poniżej przedstawiono główną procedurę programu, w której zaimplementowano powyższy sposób obsługi. 17

18 (7) Przetworzenie odebranych na bajtów na system dziesiątkowy opiera się o podstawowe operacje arytmetyczne. W wypadku wyświetlenia temperatury jako zmiennej float (zmiennoprzecinkowa) użyto funkcji wbudowanej w bibliotekę avrlibc, mianowicie dtostrf(). Składnia tej funkcji jest następująca: *char dtostrf (double _val, char _width, char _prec, char *_s); 18
.")
19 W oparciu o powyższy program można stworzyć rozbudowaną aplikację umożliwiającą obsługę kilku układów termometrów na jednej linii danych. Należy wyłącznie wysyłać odpowiednie komendy na magistralę oraz postępować zgodnie ze schematem obsługi układu. 6. Podsumowanie Układ DS18B20 jest jednym z kamieni milowych współczesnej elektroniki. Zadziwia łatwością obsługi i możliwościami. Wynik pomiaru temperatury jest cyfrowy łatwy do obróbki we współczesnych systemach mikroprocesorowych. Interfejs 1-Wire rozszerza możliwości układu o wiele aspektów, ot choćby o realizację magistrali z wieloma układami Slave. Programowalna rozdzielczość pozwala na dosyć precyzyjne pomiary nawet z dokładnością 0,0625 o C. Wszystkie te zalety sprawiają, że jest to jeden z najpopularniejszych cyfrowych układów pomiaru temperatury o niskiej cenie do zastosowań różnego rodzaju. 7. Bibliografia [1] Grębosz J.: Symfonia C++. Kraków 1999, Kallimach [2] Opracowanie własne Programowanie mikrokontrolerów AVR w języku C. Kraków 2007 [3] Dallas Semiconductor : DS18B20 datasheet. [4] DODATEK Podstawowe operacje bitowe Operatory bitowe pozwalają nam na operacje na bitach typów całkowitych takich jak char, int, long int. W języku c mamy do dyspozycji 6 takich operatorów. ~ - bitowa negacja - bitowa alternatywa (OR) & - bitowa koniunkcja (AND) ^ - bitowa różnica symetryczna (XOR) >> - bitowe przesunięcie w prawo << - bitowe przesunięcie w lewo a = 7 4 = ( ) U2 ( ) U2 = ( ) U2 = 7 a = 90^(-24) =( ) U2^( ) U2 = ( ) U2 = -78 a = 7&4 = ( ) U2 &( ) U2 = ( ) U2 = 4 a = 80>>2 = ( ) U2 >>2 = ( ) U2 = 20 a = 5<<4 = ( ) U2 <<4 = ( ) U2 = 80 19

OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20
 OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20 wydanie drugie Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków 2010 cezary.klimasz@gmail.com
OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20 wydanie drugie Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków 2010 cezary.klimasz@gmail.com
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Systemy wbudowane Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20
 Systemy wbudowane Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20 Dokumentacja projektu. Temat projektu: Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20 zrealizowana z wykorzystaniem
Systemy wbudowane Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20 Dokumentacja projektu. Temat projektu: Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20 zrealizowana z wykorzystaniem
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 MAGISTRALA 1-WIRE
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 MAGISTRALA 1-WIRE Opracował: dr inŝ. Wojciech Wojtkowski
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 MAGISTRALA 1-WIRE Opracował: dr inŝ. Wojciech Wojtkowski
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Termometr cyfrowy DS18B20 obudowy i wyprowadzenia
 Magistrala 1-wire Magistrala 1-wire składa się z pojedynczej linii. Na magistrali 1-wire jedno urządzenie MASTER nadzoruje pracę jednego lub wielu urządzeń SLAVE. Urządzenie MASTER oraz wszystkie SLAVE
Magistrala 1-wire Magistrala 1-wire składa się z pojedynczej linii. Na magistrali 1-wire jedno urządzenie MASTER nadzoruje pracę jednego lub wielu urządzeń SLAVE. Urządzenie MASTER oraz wszystkie SLAVE
MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN
 MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
Zewnętrzne układy peryferyjne cz. 2 Wykład 13
 Zewnętrzne układy peryferyjne cz. 2 Wykład 13 EEPROM I2C Standardowa pamięć EEPROM I2C 2 Pamięć EEPROM I2C Pamięci EEPROM I2C są popularną rodziną prosty układów z pamięcią nieulotną EEPROM, kasowaną elektrycznie,
Zewnętrzne układy peryferyjne cz. 2 Wykład 13 EEPROM I2C Standardowa pamięć EEPROM I2C 2 Pamięć EEPROM I2C Pamięci EEPROM I2C są popularną rodziną prosty układów z pamięcią nieulotną EEPROM, kasowaną elektrycznie,
Zdalny czujnik. Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009
 Wrocław, 12 czerwca 2009") Zdalny czujnik Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009 Dokument został stworzony w ramach kursu Wizualizacja danych sensorycznych, prowadzonego przez dra inż. Bogdana
Zdalny czujnik Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009 Dokument został stworzony w ramach kursu Wizualizacja danych sensorycznych, prowadzonego przez dra inż. Bogdana
o Instalacja środowiska programistycznego (18) o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)
 o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)") O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
Sterownik procesorowy S-2 Komunikacja RS485 MODBUS
 Sterownik procesorowy S-2 Komunikacja RS485 MODBUS Sterownik centrali wentylacyjnej PRO-VENT S2 umożliwia komunikację z innymi urządzeniami poprzez interfejs szeregowy RS485. Zapis i odczyt danych realizowany
Sterownik procesorowy S-2 Komunikacja RS485 MODBUS Sterownik centrali wentylacyjnej PRO-VENT S2 umożliwia komunikację z innymi urządzeniami poprzez interfejs szeregowy RS485. Zapis i odczyt danych realizowany
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne.
 Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
2. Format danych i zaimplementowane funkcje MODBUS
 SIC184 Protokół MODBUS-RTU (v1.10) Spis treści 1. Informacje wstępne... 1 2. Format danych i zaimplementowane funkcje MODBUS... 1 3. Opis rejestrów i funkcji... 2 3.1 Odczyt stanu wejść/wyjść... 2 3.2
SIC184 Protokół MODBUS-RTU (v1.10) Spis treści 1. Informacje wstępne... 1 2. Format danych i zaimplementowane funkcje MODBUS... 1 3. Opis rejestrów i funkcji... 2 3.1 Odczyt stanu wejść/wyjść... 2 3.2
2.1 Porównanie procesorów
 1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
Konfiguracja parametrów pozycjonowania GPS 09.05.2008 1/5
 Konfiguracja parametrów pozycjonowania GPS 09.05.2008 1/5 Format złożonego polecenia konfigurującego system pozycjonowania GPS SPY-DOG SAT ProSafe-Flota -KGPS A a B b C c D d E e F f G g H h I i J j K
Konfiguracja parametrów pozycjonowania GPS 09.05.2008 1/5 Format złożonego polecenia konfigurującego system pozycjonowania GPS SPY-DOG SAT ProSafe-Flota -KGPS A a B b C c D d E e F f G g H h I i J j K
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Opis czytnika TRD-FLAT CLASSIC ver. 1.1. Naścienny czytnik transponderów UNIQUE w płaskiej obudowie
 TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
Opis czytnika TRD-80 CLASSIC ver Moduł czytnika transponderów UNIQUE z wbudowaną anteną
 TRD-80 CLASSIC Moduł czytnika transponderów UNIQUE z wbudowaną anteną Podstawowe cechy : zasilanie od 3V do 6V zintegrowana antena 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT zasięg odczytu
TRD-80 CLASSIC Moduł czytnika transponderów UNIQUE z wbudowaną anteną Podstawowe cechy : zasilanie od 3V do 6V zintegrowana antena 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT zasięg odczytu
Instrukcja do ćwiczeń nr 4 typy i rodzaje zmiennych w języku C dla AVR, oraz ich deklarowanie, oraz podstawowe operatory
 Instrukcja do ćwiczeń nr 4 typy i rodzaje zmiennych w języku C dla AVR, oraz ich deklarowanie, oraz podstawowe operatory Poniżej pozwoliłem sobie za cytować za wikipedią definicję zmiennej w informatyce.
Instrukcja do ćwiczeń nr 4 typy i rodzaje zmiennych w języku C dla AVR, oraz ich deklarowanie, oraz podstawowe operatory Poniżej pozwoliłem sobie za cytować za wikipedią definicję zmiennej w informatyce.
Arduino dla początkujących. Kolejny krok Autor: Simon Monk. Spis treści
 Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
1.2 Schemat blokowy oraz opis sygnałów wejściowych i wyjściowych
 Dodatek A Wyświetlacz LCD. Przeznaczenie i ogólna charakterystyka Wyświetlacz ciekłokrystaliczny HY-62F4 zastosowany w ćwiczeniu jest wyświetlaczem matrycowym zawierającym moduł kontrolera i układ wykonawczy
Dodatek A Wyświetlacz LCD. Przeznaczenie i ogólna charakterystyka Wyświetlacz ciekłokrystaliczny HY-62F4 zastosowany w ćwiczeniu jest wyświetlaczem matrycowym zawierającym moduł kontrolera i układ wykonawczy
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
UW-DAL-MAN v2 Dotyczy urządzeń z wersją firmware UW-DAL v5 lub nowszą.
 Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Wrocławska
 Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Opis procedur asemblera AVR
 Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Opis czytnika TRD-55 CLASSIC ver Moduł czytnika transponderów UNIQUE z zewnętrzną anteną
 TRD-55 CLASSIC Moduł czytnika transponderów UNIQUE z zewnętrzną anteną Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT możliwość dołączenia różnych anten
TRD-55 CLASSIC Moduł czytnika transponderów UNIQUE z zewnętrzną anteną Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT możliwość dołączenia różnych anten
2010-04-12. Magistrala LIN
 Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Opis czytnika TRD-FLAT 2LN ver Naścienny czytnik transponderów UNIQUE w płaskiej obudowie
 TRD-FLAT 2LN Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 9V do 12V połączenie z kontrolerem tylko dwoma przewodami POWER w kolorze żółtym czerwono-zielony
TRD-FLAT 2LN Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 9V do 12V połączenie z kontrolerem tylko dwoma przewodami POWER w kolorze żółtym czerwono-zielony
ADVANCE ELECTRONIC. Instrukcja obsługi aplikacji. Modbus konfigurator. Modbus konfigurator. wersja 1.1
 Instrukcja obsługi aplikacji 1 1./ instalacja aplikacji. Aplikacja służy do zarządzania, konfigurowania i testowania modułów firmy Advance Electronic wyposażonych w RS485 pracujących w trybie half-duplex.
Instrukcja obsługi aplikacji 1 1./ instalacja aplikacji. Aplikacja służy do zarządzania, konfigurowania i testowania modułów firmy Advance Electronic wyposażonych w RS485 pracujących w trybie half-duplex.
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
m e d i a s e r v i c e Moduł kamery JPEG z komunikacją szeregową CJ0706A
 1. Opis ogólny: /XXX/YYY (XXX przyjmować może wartości 232, 485 lub TTL, zaś YYY, to 090 lub 120) jest wysokozintegrowaną płytką, stanowiącą bazę do budowy systemów współpracujących z urządzeniami PDA,
1. Opis ogólny: /XXX/YYY (XXX przyjmować może wartości 232, 485 lub TTL, zaś YYY, to 090 lub 120) jest wysokozintegrowaną płytką, stanowiącą bazę do budowy systemów współpracujących z urządzeniami PDA,
Mikroprocesor Operacje wejścia / wyjścia
 Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Zespół Szkół Technicznych. Badanie wyświetlaczy LCD
 Zespół Szkół Technicznych Badanie wyświetlaczy LCD WYŚWIETLACZE LCD CZĘSC TEORETYCZNA ZALETY: ) mały pobór mocy, 2) ekonomiczność pod względem zużycia energii (pobór prądu przy 5V mniejszy niż 2mA), 3)
Zespół Szkół Technicznych Badanie wyświetlaczy LCD WYŚWIETLACZE LCD CZĘSC TEORETYCZNA ZALETY: ) mały pobór mocy, 2) ekonomiczność pod względem zużycia energii (pobór prądu przy 5V mniejszy niż 2mA), 3)
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MS360-LPM. wersja 1.09 (wersja robocza) Dokumentacja użytkownika
 Dokumentacja użytkownika") MS360-LPM wersja 1.09 (wersja robocza) Dokumentacja użytkownika Białystok 2011 Podstawy Komunikacja z multiczujnikiem MS360-LPM dostępna jest za pomocą transmisji szeregowej EIA-485 (wcześniej RS-485)
MS360-LPM wersja 1.09 (wersja robocza) Dokumentacja użytkownika Białystok 2011 Podstawy Komunikacja z multiczujnikiem MS360-LPM dostępna jest za pomocą transmisji szeregowej EIA-485 (wcześniej RS-485)
GRM-10 - APLIKACJA PC
 GRM-10 - APLIKACJA PC OPIS Aplikacja służy do aktualizacji oprogramowania urządzenia GRM-10 oraz jego konfiguracji z poziomu PC. W celu wykonania wskazanych czynności konieczne jest połączenie GRM-10 z
GRM-10 - APLIKACJA PC OPIS Aplikacja służy do aktualizacji oprogramowania urządzenia GRM-10 oraz jego konfiguracji z poziomu PC. W celu wykonania wskazanych czynności konieczne jest połączenie GRM-10 z
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
STR-6610-D Naścienny przetwornik temperatury z czujnikiem Dallas
 STR-6610-D Naścienny przetwornik temperatury z czujnikiem Dallas AN-STR-6610-Dv1_01 Data aktualizacji: 05/2011r. 05/2011 AN-STR-6610-Dv1_01 1 Spis treści Symbole i oznaczenia... 3 Ogólne zasady instalacji
STR-6610-D Naścienny przetwornik temperatury z czujnikiem Dallas AN-STR-6610-Dv1_01 Data aktualizacji: 05/2011r. 05/2011 AN-STR-6610-Dv1_01 1 Spis treści Symbole i oznaczenia... 3 Ogólne zasady instalacji
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Instrukcja do ćwiczenia nr 9 Sposoby zabezpieczania transmisji danych przed zakłóceniami
 Pracownia Transmisji Danych, Instytut Fizyki UMK, Toruń Instrukcja do ćwiczenia nr 9 Sposoby zabezpieczania transmisji danych przed zakłóceniami I. Cel ćwiczenia Instrukcję przygotował mgr inż. Jarosław
Pracownia Transmisji Danych, Instytut Fizyki UMK, Toruń Instrukcja do ćwiczenia nr 9 Sposoby zabezpieczania transmisji danych przed zakłóceniami I. Cel ćwiczenia Instrukcję przygotował mgr inż. Jarosław
Konwerter 1 Wire > SPI opisany P R Ow JVerilogu
 Konwerter 1 Wire > SPI opisany P R Ow JVerilogu E K T Y Konwerter 1 Wire > SPI opisany w Verilogu, część 1 AVT 443 Prezentowany konwerter jest przeznaczony szczególnie do współpracy z układami termometrów
Konwerter 1 Wire > SPI opisany P R Ow JVerilogu E K T Y Konwerter 1 Wire > SPI opisany w Verilogu, część 1 AVT 443 Prezentowany konwerter jest przeznaczony szczególnie do współpracy z układami termometrów
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI
 Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
Inż. Kamil Kujawski Inż. Krzysztof Krefta. Wykład w ramach zajęć Akademia ETI
 Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Aby w pełni przetestować układ o trzech wejściach IN_0, IN_1 i IN_2 chcemy wygenerować wszystkie możliwe kombinacje sygnałów wejściowych.
 Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Laboratorium nr 5. Interfejs 1-Wire. Kurs: Sterowniki mikroprocesorowe w aplikacjach sieciowych Prowadzący: dr inż. Marian Bogdan
 Grzegorz Pietrzak (133329) Konrad Procak (133340) Andrzej Rukasz (133349) Jacek Symonowicz (133375) Wrocław, dnia 11 stycznia 2007 Laboratorium nr 5 Interfejs 1-Wire Kurs: Sterowniki mikroprocesorowe w
Grzegorz Pietrzak (133329) Konrad Procak (133340) Andrzej Rukasz (133349) Jacek Symonowicz (133375) Wrocław, dnia 11 stycznia 2007 Laboratorium nr 5 Interfejs 1-Wire Kurs: Sterowniki mikroprocesorowe w
Kurs Zaawansowany S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
ZASOBY ZMIENNYCH W STEROWNIKACH SAIA-BURGESS
 ZASOBY ZMIENNYCH W STEROWNIKACH SAIA-BURGESS Autorzy Wydanie Data : : : Zespół SABUR Sp. z o.o. 3.00 Sierpień 2013 2013 SABUR Sp. z o. o. Wszelkie prawa zastrzeżone Bez pisemnej zgody firmy SABUR Sp. z
ZASOBY ZMIENNYCH W STEROWNIKACH SAIA-BURGESS Autorzy Wydanie Data : : : Zespół SABUR Sp. z o.o. 3.00 Sierpień 2013 2013 SABUR Sp. z o. o. Wszelkie prawa zastrzeżone Bez pisemnej zgody firmy SABUR Sp. z
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
MultiTool instrukcja użytkownika 2010 SFAR
 MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
Uczeń/Uczennica po zestawieniu połączeń zgłasza nauczycielowi gotowość do sprawdzenia układu i wszystkich połączeń.
 Nazwa implementacji: Termometr cyfrowy - pomiar temperatury z wizualizacją pomiaru na wyświetlaczu LCD Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania elementu zestawu modułu-interfejsu
Nazwa implementacji: Termometr cyfrowy - pomiar temperatury z wizualizacją pomiaru na wyświetlaczu LCD Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania elementu zestawu modułu-interfejsu
AVR DRAGON. INSTRUKCJA OBSŁUGI (wersja 1.0)
") AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
1. Cel ćwiczenia. Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU.
 1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
16. Szeregowy interfejs SPI
 16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
ĆWICZENIE 7. Wprowadzenie do funkcji specjalnych sterownika LOGO!
 ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
Odbiornik pilotów RC-5. z interfejsem RS-485 / MODBUS
 Odbiornik pilotów RC-5 z interfejsem RS-485 / MODBUS Wersja urządzenia: 1.0 Wersja dokumentacji: 1.1 http://plc-home.pl 1. Projekt, prawa i użytkowanie Poniżej opisane urządzenie jest projektem hobbystycznym
Odbiornik pilotów RC-5 z interfejsem RS-485 / MODBUS Wersja urządzenia: 1.0 Wersja dokumentacji: 1.1 http://plc-home.pl 1. Projekt, prawa i użytkowanie Poniżej opisane urządzenie jest projektem hobbystycznym
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Układy Cyfrowe projekt. Korekcja jasności obrazów w 24-bitowym formacie BMP z użyciem funkcji gamma. Opis głównych modułów sprzętowych
 Michał Leśniewski Tomasz Władziński Układy Cyfrowe projekt Korekcja jasności obrazów w 24-bitowym formacie BMP z użyciem funkcji gamma Opis głównych modułów sprzętowych Realizacja funkcji gamma entity
Michał Leśniewski Tomasz Władziński Układy Cyfrowe projekt Korekcja jasności obrazów w 24-bitowym formacie BMP z użyciem funkcji gamma Opis głównych modułów sprzętowych Realizacja funkcji gamma entity
Bit 11 pierwszego słowa komunikacji acyklicznej ustawny jest na wartość 0 i nie podlega modyfikacji.
 1 2 Posługując się komunikacją acykliczną do dyspozycji mamy 4 słowa za pomocą których przesyłamy identyfikację żądania, numer parametru jego indeks oraz wartość. Pierwsze słowo PKE zawiera informację
1 2 Posługując się komunikacją acykliczną do dyspozycji mamy 4 słowa za pomocą których przesyłamy identyfikację żądania, numer parametru jego indeks oraz wartość. Pierwsze słowo PKE zawiera informację
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000
 APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 Autor: Ver: Marcin Ataman 1.0 Spis treści strona 1. Wstęp... 2 2. Pierwsze uruchomienie....
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 Autor: Ver: Marcin Ataman 1.0 Spis treści strona 1. Wstęp... 2 2. Pierwsze uruchomienie....
Programowy emulator DS1990
 Programowy emulator DS1990 Oprogramowanie dla trybu 1-Wire Slave Chyba każdy z elektroników zna interfejs 1-Wire. Wystarczy wspomnieć, jaką popularnością cieszyły się niegdyś układy DS1990 powszechnie
Programowy emulator DS1990 Oprogramowanie dla trybu 1-Wire Slave Chyba każdy z elektroników zna interfejs 1-Wire. Wystarczy wspomnieć, jaką popularnością cieszyły się niegdyś układy DS1990 powszechnie
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu. Jakub Stanisz
 WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
Pracownia Transmisji Danych, Instytut Fizyki UMK, Toruń. Instrukcja do ćwiczenia nr 10. Transmisja szeregowa sieciami energetycznymi
 Pracownia Transmisji Danych, Instytut Fizyki UMK, Toruń Instrukcja do ćwiczenia nr 10 Transmisja szeregowa sieciami energetycznymi I. Cel ćwiczenia poznanie praktycznego wykorzystania standardu RS232C
Pracownia Transmisji Danych, Instytut Fizyki UMK, Toruń Instrukcja do ćwiczenia nr 10 Transmisja szeregowa sieciami energetycznymi I. Cel ćwiczenia poznanie praktycznego wykorzystania standardu RS232C
Instrukcja MM-717 Tarnów 2010
 Instrukcja MM-717 Tarnów 2010 Przeznaczenie modułu komunikacyjnego MM-717. Moduł komunikacyjny MM-717 służy do realizacji transmisji z wykorzystaniem GPRS pomiędzy systemami nadrzędnymi (systemami SCADA)
Instrukcja MM-717 Tarnów 2010 Przeznaczenie modułu komunikacyjnego MM-717. Moduł komunikacyjny MM-717 służy do realizacji transmisji z wykorzystaniem GPRS pomiędzy systemami nadrzędnymi (systemami SCADA)
Mikrokontrolery AVR Wprowadzenie
 Mikrokontrolery AVR Wprowadzenie Komunikacja z otoczeniem mikrokontrolera Każdy z mikrokontrolerów posiada pewna liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
Mikrokontrolery AVR Wprowadzenie Komunikacja z otoczeniem mikrokontrolera Każdy z mikrokontrolerów posiada pewna liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
HP-1 parametry. Pobór prądu (przy zasilaniu 12V) Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia
 Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia") HP-1 HP-1 parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia Pomiar
HP-1 HP-1 parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia Pomiar
Pomoc do programu ISO Manager
 Pomoc do programu ISO Manager Wersja 1.1 1 1. Nawiązanie połączenia detektora ISO-1 z aplikacją ISO Manager Należy pobrać program ISO Manager ze strony producenta www.ratmon.com/pobierz, zainstalować na
Pomoc do programu ISO Manager Wersja 1.1 1 1. Nawiązanie połączenia detektora ISO-1 z aplikacją ISO Manager Należy pobrać program ISO Manager ze strony producenta www.ratmon.com/pobierz, zainstalować na
Funkcje sterownika CellBOX-UxR ModBUS RTU
 BIATEL S.A. Plac Piłsudskiego 1 00 078 Warszawa Funkcje sterownika CellBOX-UxR ModBUS RTU Białystok 2006-10-13 wersja 1.2 Opracował: mgr inż. Paweł Kozłowski BIATEL S.A. 1 Funkcje sterownika CellBOX Modbus
BIATEL S.A. Plac Piłsudskiego 1 00 078 Warszawa Funkcje sterownika CellBOX-UxR ModBUS RTU Białystok 2006-10-13 wersja 1.2 Opracował: mgr inż. Paweł Kozłowski BIATEL S.A. 1 Funkcje sterownika CellBOX Modbus
Komunikacja z czujnikiem
 THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
THP-100-x parametry. Pobór prądu (przy zasilaniu 12V) Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia
 Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia") THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
Operatory AND, OR, NOT, XOR Opracował: Andrzej Nowak Bibliografia:
 Operatory logiczne Komputery i ich logika AND - && Podstawy programowania w C++ Operatory AND, OR, NOT, XOR Opracował: Andrzej Nowak Bibliografia: CPA: PROGRAMMING ESSENTIALS IN C++ https://www.netacad.com
Operatory logiczne Komputery i ich logika AND - && Podstawy programowania w C++ Operatory AND, OR, NOT, XOR Opracował: Andrzej Nowak Bibliografia: CPA: PROGRAMMING ESSENTIALS IN C++ https://www.netacad.com
Komunikacja między sterownikami przez protokół ADS
 Komunikacja między sterownikami przez protokół ADS Poziom trudności: łatwy Wersja dokumentacji: 1.0 Aktualizacja: 20.03.2015 Beckhoff Automation Sp. z o. o. Spis treści 1. Komunikacja ADS... 3 2. Konfiguracja
Komunikacja między sterownikami przez protokół ADS Poziom trudności: łatwy Wersja dokumentacji: 1.0 Aktualizacja: 20.03.2015 Beckhoff Automation Sp. z o. o. Spis treści 1. Komunikacja ADS... 3 2. Konfiguracja
ELPM-8DI8DOasLightCount
 Sterownik PLC ELPM-8DI8DO z aplikacją ELPM-8DI8DOasLightCount wersja v1.1 2018 08 28 www.el-piast.com 1 1. Opis ogólny ELPM-8DI8DOasLightCount-PL-V1 Moduły ELPM- są to sterowniki swobodnie programowalne
Sterownik PLC ELPM-8DI8DO z aplikacją ELPM-8DI8DOasLightCount wersja v1.1 2018 08 28 www.el-piast.com 1 1. Opis ogólny ELPM-8DI8DOasLightCount-PL-V1 Moduły ELPM- są to sterowniki swobodnie programowalne
Protokół komunikacyjny sondy cyfrowej CS-26/RS-485 (lub RS-232)
") 2011-07-04 Protokół komunikacyjny sondy cyfrowej CS-26/RS-485 (lub RS-232) Parametry transmisji : 9600, N, 8, 1 Sonda CS-26/RS-485 dołączona do interfejsu RS-485 pracuje poprawnie w trybie half-duplex.
2011-07-04 Protokół komunikacyjny sondy cyfrowej CS-26/RS-485 (lub RS-232) Parametry transmisji : 9600, N, 8, 1 Sonda CS-26/RS-485 dołączona do interfejsu RS-485 pracuje poprawnie w trybie half-duplex.
Opis układów wykorzystanych w aplikacji
 Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Wprowadzenie do architektury komputerów systemy liczbowe, operacje arytmetyczne i logiczne
 Wprowadzenie do architektury komputerów systemy liczbowe, operacje arytmetyczne i logiczne 1. Bit Pozycja rejestru lub komórki pamięci służąca do przedstawiania (pamiętania) cyfry w systemie (liczbowym)
Wprowadzenie do architektury komputerów systemy liczbowe, operacje arytmetyczne i logiczne 1. Bit Pozycja rejestru lub komórki pamięci służąca do przedstawiania (pamiętania) cyfry w systemie (liczbowym)
Organizacja typowego mikroprocesora
 Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Tranzystor JFET i MOSFET zas. działania
 Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
2.2 Opis części programowej
 2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
Podstawy programowania w języku C i C++
 Podstawy programowania w języku C i C++ Część czwarta Operatory i wyrażenia Autor Roman Simiński Kontakt roman.siminski@us.edu.pl www.us.edu.pl/~siminski Niniejsze opracowanie zawiera skrót treści wykładu,
Podstawy programowania w języku C i C++ Część czwarta Operatory i wyrażenia Autor Roman Simiński Kontakt roman.siminski@us.edu.pl www.us.edu.pl/~siminski Niniejsze opracowanie zawiera skrót treści wykładu,
Biblioteki pakietu STEP 7 Basic 10.5 do RFID (protokół 3964R)
") Biblioteki pakietu STEP 7 Basic 10.5 do RFID (protokół 3964R) Systemy RFID powoli zajmują dominującą pozycję na rynku identyfikacji bezstykowej. Coraz częściej czytniki tego typu są także integrowane w
Biblioteki pakietu STEP 7 Basic 10.5 do RFID (protokół 3964R) Systemy RFID powoli zajmują dominującą pozycję na rynku identyfikacji bezstykowej. Coraz częściej czytniki tego typu są także integrowane w
SmartDRIVE protokół transmisji szeregowej RS-485
 SmartDRIVE protokół transmisji szeregowej RS-485 Dokumentacja przygotowana przez firmę Gryftec w oparciu o oryginalną dokumentację dostarczoną przez firmę Westline GRYFTEC 1 / 12 1. Przegląd Kontrolery
SmartDRIVE protokół transmisji szeregowej RS-485 Dokumentacja przygotowana przez firmę Gryftec w oparciu o oryginalną dokumentację dostarczoną przez firmę Westline GRYFTEC 1 / 12 1. Przegląd Kontrolery
Rysunek 1: Schemat układu pomiarowego.
 Ćwiczenie nr 35 INTERFEJS IEC-625 (GPIB, IEEE 488) Cel: Celem ćwiczenia jest poznanie działania interfejsu GPIB oraz jego możliwości w systemach pomiarowych. W tym ćwiczeniu badane będą charakterystyki
Ćwiczenie nr 35 INTERFEJS IEC-625 (GPIB, IEEE 488) Cel: Celem ćwiczenia jest poznanie działania interfejsu GPIB oraz jego możliwości w systemach pomiarowych. W tym ćwiczeniu badane będą charakterystyki
Kurs Podstawowy S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Generator cyfrowy w systemie z interfejsem IEEE-488 Data wykonania: 24.04.08 Data oddania: 15.05.08 Celem ćwiczenia było
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Generator cyfrowy w systemie z interfejsem IEEE-488 Data wykonania: 24.04.08 Data oddania: 15.05.08 Celem ćwiczenia było